Область техники, к которой относится изобретение
Изобретение относится к датчиковой системе состояния барботажного устройства.
Уровень техники
Для флотации минералов используются барботажные системы для ускорения прикрепления и извлечения гидрофобных частиц посредством образования мелкой пузырьковой дисперсии. Это осуществляется путем размещения ряда барботажных устройств на периферии флотационных резервуаров. Барботажные устройства генерируют большое количество пузырьков с оптимальным размером для данного варианта применения. В частности, они предназначены для создания высоких показателей площади поверхности пузырьков, что гарантирует высокую вероятность прикрепления и улучшенное извлечение гидрофобных частиц. Более мелкие обогатительные предприятия могут иметь всего один флотационный резервуар, в то время как более крупные предприятия могут иметь несколько десятков флотационных резервуаров. Каждый флотационный резервуар может иметь тридцать или более барботажных устройств. Это означает, что на больших перерабатывающих предприятиях могут легко располагаться сотни барботажных устройств, что влечет за собой значительные инвестиции в оборудование, техническое обслуживание и ремонт.
Функционирование барботажных устройств предшествующего уровня техники по существу контролировалось через их собственные устройства управления, поскольку было трудно контролировать производительность в реальном времени, а также обеспечивать обратную связь и устранение неполадок для барботажных устройств, которые работали неэффективно или не работали вообще. Только при плановом обслуживании проблемы могли быть обнаружены, если они вообще обнаруживались.
Предлагается барботажное устройство для ввода пузырьков в системы флотации, которые включают в себя датчики и механизмы, обеспечивающие индикаторы состояния функционирования отдельного барботажного устройства, а также всей системы для обеспечения сетевой связи между множеством барботажных устройств в одной системе флотации или в объекте, который имеет множество систем флотации.
Раскрытие сущности изобретения
Изобретение относится к барботажному устройству и датчиковой системе для барботажного устройства, которое содержит корпус и подвижный стержень в сборе для ввода пузырьков во флотационную систему. Датчиковая система содержит датчик и мишень, которые перемещаются относительно друг друга. Один элемент из датчика и мишени находится в корпусе, а другой расположен на подвижном стержне в сборе или прикреплен к нему. Датчик предназначен для измерения перемещения, в том числе положения и вибрации, относительно мишени на основе перемещения подвижного стержня в сборе. Датчиковая система для определения рабочих параметров барботажного устройства основана на анализе измерения перемещения датчика относительно мишени. Датчик представляет собой один из следующих типов датчиков: датчик Холла, индуктивный датчик приближения или оптический датчик приближения. Датчиковая система измеряет перемещение подвижного стержня в сборе, положение подвижного стержня в сборе и вибрацию подвижного стержня в сборе. Датчиковая система определяет наличие режимов отказа барботажного устройства, причем отказом является любая из следующих неисправностей: закупоренное сопло, порванная диафрагма, потеря давления или потеря жидкости.
Датчик датчиковой системы подает сигнал в процессор обработки сигналов. Процессор обработки сигналов содержит формирователь сигналов датчика, аналого-цифровой преобразователь и анализатор сигналов датчика. Процессор обработки сигналов генерирует выходной сигнал, подаваемый на индикаторы, расположенные на корпусе, и/или в центральный блок управления по проводной или беспроводной дистанционной связи.
В некоторых вариантах осуществления изобретения сеть датчиковых систем для барботажных устройств, предназначенных для ввода пузырьков во флотационную систему, содержит множество барботажных устройств, каждое из которых содержит корпус, подвижный стержень в сборе и датчиковую систему. Каждая датчиковая система дополнительно содержит датчик и мишень, которые перемещаются относительно друг друга, причем один элемент из датчика и мишени расположен в корпусе, а другой расположен на подвижном стержне в сборе или прикреплен к нему. Датчик предназначен для измерения перемещения, в том числе положения и вибрации, относительно мишени на основе перемещения подвижного стержня в сборе. Датчиковая система предназначена для определения рабочих параметров барботажного устройства на основе анализа измерения перемещения указанного датчика относительно указанной мишени. Каждый датчик подает сигнал в процессор обработки сигналов, который генерирует сигнал, подаваемый в центральный блок управления. Центральный блок управления собирает и анализирует каждый сигнал для отображения рабочих параметров каждого соответствующего барботажного устройства и предоставляет общие данные о производительности системы.
В некоторых вариантах осуществления изобретения множество барботажных устройств установлено в единственной системе флотационного разделения. В других системах указанное множество барботажных устройств установлено в нескольких системах флотационного разделения. Выходной сигнал подается в упомянутый центральный блок управления по беспроводной связи.
Специалисты в данной области техники примут во внимание, что это изобретение допускает варианты осуществления, которые отличаются от описанных, и что детали устройства и варианты его реализации могут быть изменены различными способами, не выходя за пределы объема этого изобретения. Соответственно, чертежи и описания должны рассматриваться как включающие в себя такие эквивалентные варианты осуществления, которые не выходят за пределы сущности и объема этого изобретения.
Краткое описание чертежей
Для более полного понимания и оценки настоящего изобретения и его многочисленных преимуществ ниже будет приведено подробное описание со ссылками на прилагаемые чертежи.
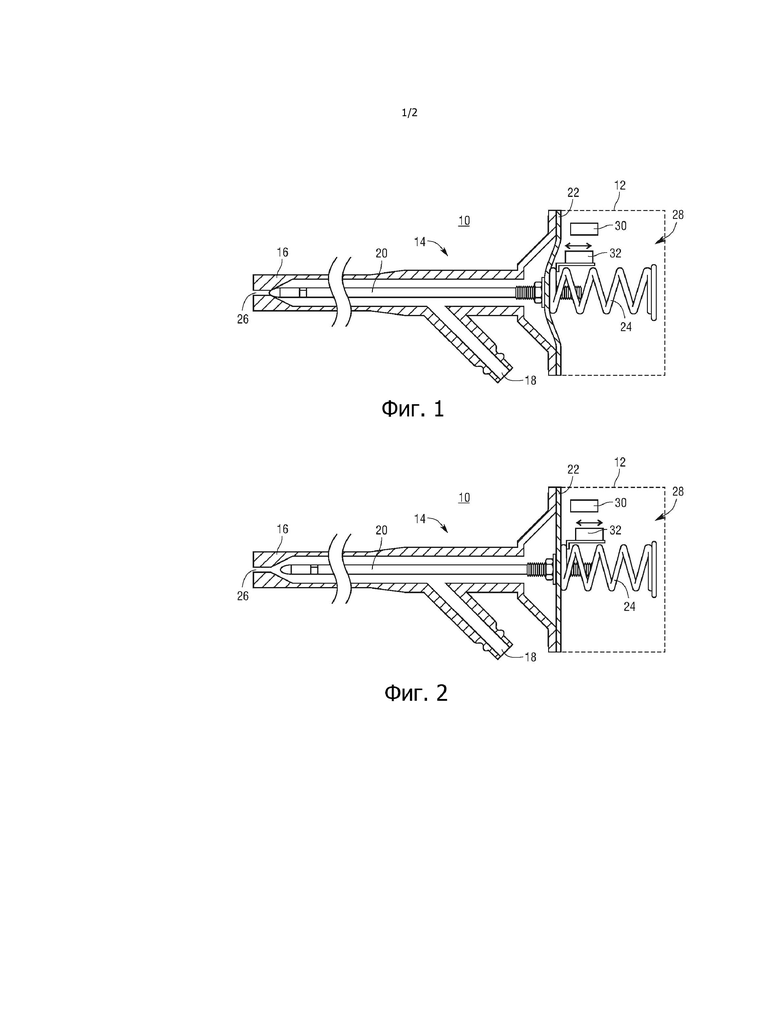
На фиг. 1 показан вид в разрезе барботажного устройства, работающего при низком давлении, когда барботажное устройство находится в закрытом положении;
на фиг. 2 – вид в разрезе барботажного устройства, работающего при высоком давлении, когда барботажное устройство находится в открытом положении;
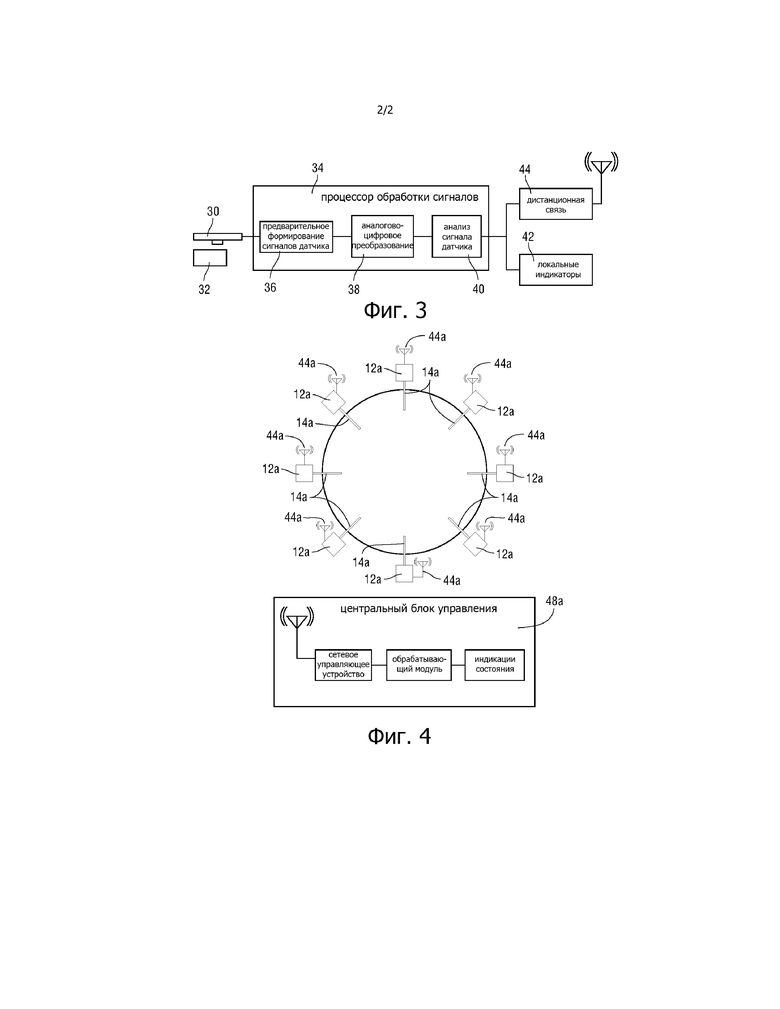
на фиг. 3 – блок-схема, иллюстрирующая этапы процесса от датчиковой системы через процессор обработки сигналов и его выход; и
на фиг.4 – ряд барботажных устройств, установленных на флотационном резервуаре и подключенных по беспроводной сети к центральному блоку управления.
Осуществление изобретения
При ссылках на чертежи некоторые из ссылочных позиций используются для обозначения одинаковых или соответствующих частей нескольких описанных и показанных на фигурах вариантов осуществления изобретения. Соответствующие части обозначены в разных вариантах осуществления изобретения с добавлением строчных букв. Здесь описаны варианты форм или функций соответствующих частей, которые изображены на фигурах. Должно быть понятно, что вариации в вариантах осуществления изобретения, как правило, могут быть взаимозаменяемыми без отклонения от идеи изобретения.
Как показано на фиг. 1 и 2, барботажные устройства 10 содержат корпус 12 и подвижный стержень 14 в сборе. Подвижный стержень 14 в сборе дополнительно содержит сопло 16, которое вставляется в жидкую среду внутри флотационного резервуара (не показан). С входом 18 соединен источник сжатого газа. Стержень 20 соединен с диафрагмой 22, которая дополнительно соединена с пружиной 24. Как показано на фиг. 1, когда давление газа является низким, пружина 24 толкает диафрагму 22 и стержень 20 в сопло 16, тем самым создавая герметизацию концевой части 26 сопла и предотвращая утечку жидкости из флотационного резервуара обратно в барботажное устройство. Как показано на фиг. 2, когда за счет введения сжатого газа из входа 18 создается более высокое давление, давление действует на диафрагму 22, чтобы сжать пружину 24, втягивая стержень 20 и открывая концевую часть 26 сопла, которая позволяет газу выходить через концевую часть 26 сопла для создания пузырьков в жидкой среде во флотационном резервуаре. В некоторых вариантах осуществления изобретения к потоку сжатого газа на входе 18 может добавляться жидкость для улучшения образования пузырьков.
Внутри корпуса 12 установлена датчиковая система 28. Датчиковая система 28 содержит датчик 30 и мишень 32. В варианте осуществления изобретения, показанном на фиг. 1 и 2, предпочтительно, чтобы датчик 30 был установлен неподвижно внутри корпуса 12, в то время как мишень 32 связана с подвижным стержнем 14 в сборе таким образом, что мишень 32 перемещается вместе с подвижным стержнем 14 в сборе. На фигурах показано, что мишень 32 соединена с пружиной 24, но должно быть понятно, что фактическое место установки мишени 32 на подвижном стержне 14 в сборе является несущественным, если перемещение мишени 32 является точным отражением перемещения подвижного стержня 14 в сборе. Должно быть понятно, что положение мишени 32 и датчика 30 можно изменить таким образом, чтобы мишень 32 была неподвижной, а датчик 30 перемещался вместе с подвижным стержнем 14 в сборе. Датчиковая система 28 будет работать одинаково в любой конфигурации.
Датчиковая система 28 может представлять собой систему любого типа, которая имеет датчик 30, измеряющий перемещение, включая положение и вибрацию, мишени 32 на основе перемещения подвижного стержня 14 в сборе. Примеры включают в себя датчики Холла и другие магнитные датчики, оптические датчики для визуального распознавания отражающей мишени и индуктивные датчики с металлической мишенью. В зависимости от типа используемого датчика, мишень 32 не обязательно должна быть отдельным от подвижного стержня 14 в сборе элементом, как показано на фиг. 1 и 2. Компоненты самого подвижного стержня 14 в сборе могут выполнять роль мишени 32. Поскольку датчик способен обнаруживать и измерять перемещение, включая положение и вибрацию, подвижного стержня 14 в сборе, то цель существования мишени 32 достигается без каких-либо дополнительных представленных элементов. Мишенью 32 может быть пружина 24, гайка или шайба на подвижном стержне 14 в сборе, или даже стержень 20.
Когда барботажное устройство 10 находится в закрытом положении, как показано на фиг. 1, датчик 30 определяет перемещение мишени 32 относительно датчика. При отсутствии перемещения датчиковая система 28 может определить, что газ не проходит через барботажное устройство 10 и что барботажное устройство 10 не работает. При создании более высокого давления за счет введения сжатого газа из входа 18, как показано на фиг. 2, стержень 20 перемещается и вибрирует, когда текучая среда протекает через барботажное устройство 10, при этом характер этих вибраций обеспечивает индикацию рабочего состояния барботажного устройства 10. Выходной сигнал датчика 30 является непрямым измерением давления, при котором сжатый газ вводится через вход 18 и обеспечивает рабочие параметры и режимы отказа барботажного устройства 10. Измеренное перемещение мишени 32 относительно датчика 30 указывает положение и перемещение стержня 20 и является мерой открытия концевой части 26 сопла. Минимальное полезное указание будет «полностью открыт» против «не полностью открыт». Более детализированные датчики могут измерять непрерывные изменения положения стержня 20 или процент открытия концевой части 26 сопла от полностью закрытого до полностью открытого. Если барботажное устройство 10 закупорено, датчик 30 записывает, что стержень 20 будет перемещаться, но он не вибрирует. Если мембрана 22 порвется, перепады давления и частичное изменение положения стержня 20 будут записаны, так как стержень 20 не сможет дальше перемещаться, поскольку сжатый газ имеет другое выпускное отверстие для выхода.
Измерения от датчиковой системы 28 могут комбинироваться с измерениями других параметров барботажного устройства 10, чтобы получать более точные показания производительности системы. Например, интерпретации показаний из датчиковой системы 28 могут быть соотнесены с прямым измерением потока сжатого газа из входа 18 с помощью, например, лопастного расходомера, термоанемометра, измерения перепада давления через отверстие, дифференциальное измерение температуры через отверстие или микрофон для определения шума потока. Таким образом, например, определение того, что сопло 16 закупорено, на основе показаний из датчиковой системы 28 может быть соотнесено с показаниями потока сжатого газа, чтобы подтвердить, протекает ли сжатый газ в барботажное устройство 10 и, если протекает, то в какой степени.
Какими бы ни были показания датчиковой системы 28, на фиг. 3 показано, как эти показания передаются оператору для анализа и определения рабочего состояния. Сигналы от датчика 30 передаются в процессор 34 обработки сигналов, где они приводятся в определенное состояние 36 и преобразуются в цифровой сигнал 38 для дальнейшего анализа 40. Сигнал масштабируется на основе сохраненных значений калибровки и сравнивается с пороговыми заданными значениями, чтобы определить, находится ли барботажное устройство 10 в ожидаемых условиях эксплуатации. Результаты анализа могут быть выведены на локальные индикаторы 42 на барботажном устройстве 10, например, посредством светодиодных индикаторов на корпусе или какого-либо другого отображения или вывода. Результаты также могут передаваться по дистанционной связи 44 на центральный блок управления по радиосвязи вместе с необработанными данными датчика, если это необходимо. Различные варианты выполнения датчиковой системы могут иметь только локальные индикаторы 42, только удаленную связь 44 или и то, и другое. В различных вариантах осуществления изобретения удаленная связь 44 может быть беспроводной, проводной или и той, и другой, какая будет необходима для конкретного приложения.
На фиг. 4 показан вариант осуществления изобретения, показывающий каким образом системы 44а удаленной связи датчиковой системы, размещенной в системе барботажных устройств 10а, могут быть сконфигурированы для формирования сети датчиковых систем. В этом примере во флотационном резервуаре 46а установлен ряд барботажных устройств 10а. Удаленная связь 44a от каждого из барботажных устройств 10a может быть с помощью проводов или беспроводным образом соединена с центральным блоком 48a управления, который принимает, объединяет и анализирует информацию от всех барботажных устройств и отображает общее состояние системы для оператора. Центральный блок 48a управления может отображать и/или сохранять данные локально, пересылать данные в другую систему управления или может делать и то, и другое.
Центральный блок 48а управления собирает информацию о состоянии системы от множества барботажных устройств и может выполнять дополнительный анализ данных. Это включает в себя сравнение данных от одного барботажного устройства (или группы барботажных устройств) с другим барботажным устройством (или группой барботажных устройств). Центральный блок 48а управления может также сопоставлять данные барботажного устройства с данными от других типов датчиков или индикаторов состояния, которые могут быть доступны на заводе. Например, если все барботажные устройства на заводе закрыты, центральный блок 48а управления может быть ориентирован на проверку состояния воздушного компрессора, а не на указание на то, что все барботажные устройства неисправны. Кроме того, центральный блок 48а управления может сравнивать данные от одного или нескольких барботажных устройств во времени, просматривая тенденции и изменения.
Центральный блок управления 48a также может отображать индикаторы состояния в некоторой совокупной форме, чтобы четко информировать оператора о том, сколько барботажных устройств работает неправильно, и где на заводе находится источник неисправности. Состояние может быть представлено на графическом дисплее, возможно, с сенсорным экраном для взаимодействия с пользователем, дискретными индикаторами или может быть встроено в более крупную (например, общезаводскую) систему управления/индикации.
Центральный блок 48а управления может дистанционно сообщать о состоянии операторам оборудования, руководителям и/или другим лицам, если это необходимо. Это может включать в себя, но не ограничиваясь этим, оповещения о неисправностях, звуковые сигналы, маяки, извещатель-громкоговоритель, электронную почту, текстовое сообщение, информацию о состоянии в реальном времени, удаленный ПК или приложение для смартфона.
Данное изобретение было описано со ссылкой на несколько предпочтительных вариантов осуществления. Многие модификации и изменения могут быть ясны другим специалистам при прочтении и понимании данного описания. Предполагается, что изобретение следует истолковывать как включающее в себя все такие изменения и модификации, если они входят в объем прилагаемой формулы изобретения или эквивалентов этой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесплатформенная инерциальная навигационная система подвижного носителя | 2018 |
|
RU2682060C1 |
| БЕСПРОВОДНАЯ ДАТЧИКОВАЯ СИСТЕМА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2014 |
|
RU2686805C2 |
| СИСТЕМА ВЫСОКОТОЧНОГО МОНИТОРИНГА СМЕЩЕНИЙ ИНЖЕНЕРНЫХ СООРУЖЕНИЙ | 2012 |
|
RU2496124C1 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2010 |
|
RU2439548C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДТВЕРЖДЕНИЯ ПЕРИФЕРИЙНОГО УСТРОЙСТВА В СИСТЕМЕ УПРАВЛЕНИЯ | 2013 |
|
RU2651619C2 |
| КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УЧЕТА ВАГОНООБОРОТА | 2011 |
|
RU2500562C2 |
| СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2009 |
|
RU2402760C1 |
| ЭНЕРГОСБЕРЕГАЮЩИЙ РЕЖИМ ДЛЯ ОКЕАНСКИХ ДОННЫХ СИСТЕМ ПОЛУЧЕНИЯ СЕЙСМИЧЕСКИХ ДАННЫХ | 2014 |
|
RU2650837C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ С УПРАВЛЕНИЕМ ДВИГАТЕЛЕМ НА ОСНОВЕ КОМПОНЕНТА ПРИВОДНОЙ СИСТЕМЫ | 2016 |
|
RU2732986C2 |
| Способ контроля размеров сопрягаемых элементов в затворе клиновой задвижки и устройство для его осуществления | 2015 |
|
RU2616347C1 |
Предложенная группа изобретений относится к датчиковой системе состояния барботажного устройства, используемого для ввода пузырьков в системы флотации. Датчиковая система для барботажного устройства, которое содержит корпус и подвижный стержень в сборе для ввода пузырьков во флотационную систему, причем датчиковая система содержит датчик и мишень, которые выполнены с возможностью перемещения относительно друг друга, при этом один элемент из указанного датчика и указанной мишени расположен в корпусе, а другой расположен на подвижном стержне в сборе или прикреплен к нему. Датчик предназначен для измерения перемещения, в том числе положения и вибрации, относительно указанной мишени на основе перемещения указанного подвижного стержня в сборе. Датчиковая система выполнена с возможностью определения рабочих параметров барботажного устройства на основе анализа измерения перемещения указанного датчика относительно указанной мишени. Сеть датчиковых систем для барботажных устройств, предназначенных для ввода пузырьков во флотационную систему, содержащая множество барботажных устройств, каждое из которых содержит корпус и подвижный стержень в сборе. Каждое из указанных барботажных устройств содержит датчиковую систему. Каждая датчиковая система дополнительно содержит датчик и мишень, которые выполнены с возможностью перемещения относительно друг друга. Каждый датчик выполнен с возможностью подачи сигнала в процессор обработки сигналов, который выполнен с возможностью генерирования сигнала, подаваемого в центральный блок управления. Центральный блок управления выполнен с возможностью объединения и анализа каждого указанного сигнала для отображения рабочих параметров каждого соответствующего указанного барботажного устройства и обеспечения общих данных о производительности системы. Технический результат - повышение эффективности работы барботажного устройства для улучшения образования пузырьков, способствующих ускорению прикрепления и извлечения гидрофобных частиц. 3 н. и 19 з.п. ф-лы, 4 ил.
1. Датчиковая система для барботажного устройства, которое содержит корпус и подвижный стержень в сборе для ввода пузырьков во флотационную систему, причем датчиковая система содержит:
датчик и мишень, которые выполнены с возможностью перемещения относительно друг друга, при этом один элемент из указанного датчика и указанной мишени расположен в корпусе, а другой расположен на подвижном стержне в сборе или прикреплен к нему;
причем указанный датчик предназначен для измерения перемещения, в том числе положения и вибрации, относительно указанной мишени на основе перемещения указанного подвижного стержня в сборе;
при этом указанная датчиковая система выполнена с возможностью определения рабочих параметров барботажного устройства на основе анализа измерения перемещения указанного датчика относительно указанной мишени.
2. Датчиковая система по п. 1, в которой датчик представляет собой один из следующих датчиков: датчик Холла, индуктивный датчик приближения или оптический датчик приближения.
3. Датчиковая система по п. 1, в которой указанная мишень является компонентом подвижного стержня в сборе.
4. Датчиковая система по п. 1, в которой указанный датчик выполнен с возможностью измерения перемещения подвижного стержня в сборе, положения подвижного стержня в сборе и вибрации подвижного стержня в сборе.
5. Датчиковая система по п. 1, в которой указанная датчиковая система выполнена с возможностью определения наличия режимов отказа барботажного устройства, которые представляют собой любую из следующих неисправностей: закупоренное сопло, порванная диафрагма, потеря давления или потеря жидкости.
6. Датчиковая система по п. 1, в которой указанный датчик выполнен с возможностью подачи сигнала в процессор обработки сигналов.
7. Датчиковая система по п. 1, в которой указанный датчик выполнен с возможностью подачи сигнала в процессор обработки сигналов, причем указанный процессор обработки сигналов содержит формирователь сигналов датчика, аналого-цифровой преобразователь и анализатор сигналов датчика.
8. Датчиковая система по п. 1, в которой указанный датчик выполнен с возможностью подачи сигнала в процессор обработки сигналов, причем указанный процессор обработки сигналов выполнен с возможностью генерирования сигнала, выводимого на индикаторы, расположенные на корпусе.
9. Датчиковая система по п. 1, в которой указанный датчик выполнен с возможностью подачи сигнала в процессор обработки сигналов, причем указанный процессор обработки сигналов выполнен с возможностью генерирования сигнала, подаваемого в центральный блок управления через проводную или беспроводную дистанционную связь.
10. Барботажное устройство для введения пузырьков во флотационную систему, содержащее:
корпус;
подвижный стержень в сборе;
датчиковую систему, которая содержит датчик и мишень, которые выполнены с возможностью перемещения относительно друг друга, при этом один элемент из указанного датчика и указанной мишени расположен в указанном корпусе, а другой расположен на указанном подвижном стержне в сборе или прикреплен к нему;
причем указанный датчик предназначен для измерения перемещения, в том числе положения и вибрации, относительно указанной мишени на основе перемещения указанного подвижного стержня в сборе;
при этом указанная датчиковая система выполнена с возможностью определения рабочих параметров барботажного устройства на основе анализа измерения перемещения указанного датчика относительно указанной мишени.
11. Барботажное устройство по п. 10, в котором указанный датчик представляет собой один из следующих датчиков: датчик Холла, индуктивный датчик приближения или оптический датчик приближения.
12. Барботажное устройство по п. 10, в котором указанная мишень является компонентом подвижного стержня в сборе.
13. Барботажное устройство по п. 10, в котором указанный датчик выполнен с возможностью измерения перемещения указанного подвижного стержня в сборе, положения указанного подвижного стержня в сборе и вибрации указанного подвижного стержня в сборе.
14. Барботажное устройство по п. 10, в котором указанная датчиковая система выполнена с возможностью определения наличия режимов отказа барботажного устройства, которые представляют собой любую из следующих неисправностей: закупоренное сопло, порванная диафрагма, потеря давления или потеря жидкости.
15. Барботажное устройство по п. 10, в котором указанный датчик выполнен с возможностью подачи сигнала в процессор обработки сигналов.
16. Барботажное устройство по п. 10, в котором указанный датчик выполнен с возможностью подачи сигнала в процессор обработки сигналов, причем указанный процессор обработки сигналов содержит формирователь сигналов датчика, аналого-цифровой преобразователь и анализатор сигналов датчика.
17. Барботажное устройство по п. 10, в котором датчик выполнен с возможностью подачи сигнала в процессор обработки сигналов, причем указанный процессор обработки сигналов выполнен с возможностью генерирования сигнала, выводимого на индикаторы, расположенные на корпусе.
18. Барботажное устройство по п. 10, в котором указанный датчик выполнен с возможностью подачи сигнала в процессор обработки сигналов, причем указанный процессор обработки сигналов выполнен с возможностью генерирования сигнала, подаваемого в центральный блок управления.
19. Сеть датчиковых систем для барботажных устройств, предназначенных для ввода пузырьков во флотационную систему, содержащая:
множество барботажных устройств, каждое из которых содержит корпус и подвижный стержень в сборе;
при этом каждое из указанных барботажных устройств содержит датчиковую систему, причем каждая указанная датчиковая система дополнительно содержит датчик и мишень, которые выполнены с возможностью перемещения относительно друг друга, при этом один элемент из указанного датчика и указанной мишени расположен в указанном корпусе, а другой расположен на указанном подвижном стержне в сборе или прикреплен к нему, причем указанный датчик предназначен для измерения перемещения, включая положение и вибрацию, относительно указанной мишени на основе перемещения указанного подвижного стержня в сборе, при этом указанная датчиковая система выполнена с возможностью определения рабочих параметров барботажного устройства на основе анализа измерения перемещения указанного датчика относительно указанной мишени;
причем каждый датчик выполнен с возможностью подачи сигнала в процессор обработки сигналов, при этом указанный процессор обработки сигналов выполнен с возможностью генерирования сигнала, подаваемого в центральный блок управления, причем указанный центральный блок управления выполнен с возможностью объединения и анализа каждого указанного сигнала для отображения рабочих параметров каждого соответствующего указанного барботажного устройства и обеспечения общих данных о производительности системы.
20. Сеть датчиковых систем по п. 19, в которой указанное множество барботажных устройств установлено в единственной системе флотационного разделения.
21. Сеть датчиковых систем по п. 19, в которой указанное множество барботажных устройств установлено во множестве систем флотационного разделения.
22. Сеть датчиковых систем по п. 19, в которой указанный сигнал подается в указанный центральный блок управления по беспроводной связи.
| US 5814228 A, 29.09.1998 | |||
| ОСВЕТЛИТЕЛЬ ВОДЫ С ИЗОЛЯЦИЕЙ ПЕРВОГО ФИЛЬТРАТА | 1993 |
|
RU2106313C1 |
| US 5173177 A, 22.12.1992 | |||
| US 5139663 A, 18.08.1992 | |||
| US 2005092308 A1, 05.05.2005 | |||
| WO 2015162340 A1, 29.10.2015 | |||
| CN 201231183 Y, 06.05.2009. | |||

