Изобретение относится к области неразрушающего контроля и может быть использовано для обнаружения дефектов потери металла и растрескиваний в стенках труб при проведении переизоляции трубопроводов.
Известен «Магнитный сканер дефектоскоп» СКМ-1, предназначенный для выявления стресс-коррозионных поражений стенок труб магистральных и шлейфовых газонефтепроводов, резервуаров и определения параметров трещин и коррозионных каверн («Магнитный сканер дефектоскоп» СКМ-1, рекламные документы МНПО «СПЕКТР», 2001 г.).
Известное устройство состоит из трехколесной тележки, несущей магнитную поисковую систему, состоящую из постоянного магнита и датчиков магнитного поля, размещенных между полюсными наконечниками намагничивающего устройства. На тележке размещено колесное устройство измерения пройденного пути, устройство сбора датчиковой информации, устройство предварительной обработки и регистрации датчиковой информации, источник питания. Сканер перемещается вручную по обследуемой поверхности. Собранные данные перегружаются в переносный компьютер и анализируются в интерактивном режиме человеком. Достоинством устройства является его простота.
Недостатком устройства является неудобство его использования на трубопроводах большой протяженности, невозможность проведения контроля состояния трубопровода непосредственно в ходе его очистки от изоляции и нанесения новой изоляции. Это связано с отсутствием в устройстве средств автоматизации, что не позволяет использовать устройство на трубопроводах непосредственно между очистной и праймерной машинами, так как высокий уровень шума и запыленность воздуха превышает предельные нормы, оговариваемые санитарно-гигиеническими требованиями.
Известно устройство для наружного контроля коррозионного состояния и растрескивания стенок труб непосредственно в ходе переизоляции трубопровода (Губанок И.И., Митрохин М.Ю., Морозов А.К., Синев А.И., Братчиков Д.Ю. «Отбраковка труб в процессе капитального ремонта с применением комплекса внешнетрубной дефектоскопии ДНС 1000-1400»). Третья международная конференция «Обслуживание и ремонт газонефтепроводов». Сб. докл. и сообщений. - г.Сочи, октябрь 2006 г. - Вып.2. - М.: ООО «Геоинформмарк», 2007. - 163 с. Стр.14-21.
Известное устройство состоит из стальной рамы, первой и второй магнитных поисковых систем, системы сбора информации, радиосистемы передачи информации, электродвигателей продольного перемещения, электродвигателя привода сканирующей системы, электродвигателя управления вертикальным положением, продольного одометра, автономного источника питания, пульта управления.
Известное устройство перемещается вдоль трубы на ходовых колесах, опирающихся на трубу, и с помощью шестеренчатого колеса большого диаметра приводит во вращательное движение вокруг трубы две колесные тележки с постоянными магнитами и датчиками магнитного поля. Поля, рассеиваемые около намагничиваемой постоянными магнитами трубы, преобразуются датчиками поля в электрические сигналы. Сигналы обрабатываются электронным блоком и по радиоканалу передаются в переносную ЭВМ для анализа магнитограмм оператором. Достоинством известного устройства является возможность работы непосредственно между очистной и изолирующей машинами одновременно с ними.
Недостатком известного устройства является большое энергопотребление, большой вес (около 3000 кг для трубопроводов Ду 1000-1400 мм), что требует применения тяжелой грузоподъемной техники при монтаже и демонтаже устройства на трубопроводе, а также ограничение производительности контроля из-за визуальной интерпретации магнитограмм человеком. Участие человека в процессе диагностики препятствует работе информационной части комплекса в реальном масштабе времени, что снижает производительность работы всего переизолирующего комплекса.
Наиболее близким к предлагаемому является устройство (В.Н.Лозовский, Г.С.Шелихов, А.Г.Бондал, М.С.Ямпольский. Диагностика МГ с применением «Магнитного дефектоскопа АМД-СТ». Третья международная конференция «Обслуживание и ремонт газонефтепроводов». // Сб. докл. и сообщений. - г.Сочи, октябрь 2006 г. - Вып.2. - М.: ООО «Геоинформмарк», 2007. - 163 с. стр.29-33), состоящее из рамы с четырьмя колесами, на которой укреплена магнитная поисковая система, электронная система сбора датчиковой информации, бортовой компьютер, двигатель с передачей движущего усилия на ходовые колеса, аппаратура беспроводного интерфейса. Устройство устанавливается на поверхность трубы и удерживается на ней силой притяжения магнитной поисковой системы к стенке трубы. Двигатель через редукторы оборотов вращает колеса и устройство перемещается по спирали вокруг трубы, обеспечивая диагностическое сканирование ее поверхности. Информация о магнитных аномалиях в стенке трубы поступает от датчиков магнитного поля в систему сбора данных и из бортового компьютера транслируется по радиоканалу в переносной компьютер. Оператор анализирует данные, представленные ему на экране дисплея компьютера, и интерпретирует их. По сформированному оператором отчету принимается решение о местах на трубопроводе, которые необходимо ремонтировать. Достоинством известного устройства является простота его конструкции, относительно небольшой вес, возможность установки на трубу без грузоподъемной техники (устройство может быть перемещено с земли на трубу по специальному трапу и даже по двум доскам усилиями обслуживающего персонала с использованием двигателя устройства).
Недостатком устройства является разнесенность во времени процесса сбора диагностических данных, интерпретации полученной информации и отыскивание дефектных мест на трубопроводе.
Целью изобретения является создание диагностического устройства минимального веса, способного обеспечить автоматическую разметку на трубе краской мест с недопустимыми дефектами потери металла или растрескиваниями.
Указанная цель достигается тем, что в известное устройство, содержащее тележку с несущей рамой, колесную ходовую подвеску, ходовой привод, автономный источник энергии, датчики средств неразрушающего контроля, устройство сбора датчиковой информации, устройство измерения пройденного пути, бортовой компьютер, регистратор информации, беспроводную систему передачи информации, введены опорное колесо, трехкомпонентный датчик линейных ускорений, первый и второй контроллеры управления электродвигателями, устройство сбора датчиковой информации, устройство вывода исполнительных сигналов, электроуправляемый краскопульт, шкив, рычаг, пружина и гибкий трос-пояс, причем ходовой привод состоит из первого и второго колеса, первого и второго электромотор-редуктора, а датчики неразрушающего контроля выполнены в виде вихретоковых преобразователей, причем первое ходовое колесо установлено с левой стороны рамы, а его вал соединен с выходным валом первого электромотора-редуктора, провода питания которого соединены с соответствующими выходами первого контроллера управления электродвигателем, входы управления которого соединены с соответствующими выходами бортового компьютера; второе ходовое колесо установлено с правой стороны рамы, его вал соединен с выходным валом второго электромотора-редуктора, провода питания которого соединены с соответствующими выходами второго контроллера управления электродвигателем, входы управления которого соединены с соответствующими выходами бортового компьютера; трехкомпонентный датчик линейных ускорений установлен на раме так, что оси чувствительности двух его акселерометров лежат в плоскости рамы, а ось чувствительности третьего его акселерометра направлена перпендикулярно плоскости рамы, причем ось чувствительности первого акселерометра повернута вокруг оси чувствительности третьего акселерометра на 45 градусов влево относительно продольной строительной оси рамы, а ось чувствительности второго акселерометра повернута вокруг оси чувствительности третьего акселерометра на 45 градусов вправо относительно продольной строительной оси рамы; в задней нижней части рамы укреплено опорное колесо, а с верхней стороны рамы закреплен подпружиненный рычаг, на внешней стороне которого закреплен вращающийся шкив, в желобок которого входит гибкий трос с замком, опоясывающий кольцом по окружности трубу, по наружной цилиндрической поверхности которой может перемещаться на колесах тележка устройства, в нижней части которой укреплена линейка множества вихретоковых датчиков поисковой системы неразрушающего контроля, выводы катушек возбуждения которых соединены с соответствующими выходами генератора возбуждения, а выходы измерительных катушек которых соединены с соответствующими входами множества фазочувствительных выпрямителей, выходы которых соединены с соответствующими входами устройства сбора датчиковой информации, информационные и управляющие входы которой соединены с соответствующими входами/выходами бортового компьютера, вход прерывания которого соединен с выходом датчика импульсов одометра, который размещен в опорном колесе, а выходы бортового компьютера, управляющие работой бортовых устройств, соединены с соответствующими входами устройства вывода исполнительных сигналов, выходы которой соединены с соответствующими входами управления соплами распылителей электроуправляемого краскопульта, причем интерфейсные выводы последовательного обмена бортового компьютера соединены с соответствующими выводами радиоконтроллера беспроводного интерфейса.
Изобретение поясняется чертежами. На Фиг.1 показана кинематическая схема устройства. На Фиг.2 показана функциональная схема. Фиг.3, 4, 5 поясняют алгоритм обработки данных и принятия решения.
Устройство (Фиг.1) состоит:
Тележка с рамой 1 первого 2.1 и второго 2.2 ходовых колес, первого 3.1 и второго 3.2 мотор-редукторов, опорного колеса 4, ролика 5, отжимного рычага 6, пружины 7, группы вихретоковых датчиков 8, краскопульта 9, бортовой электронной аппаратуры 10, импульсного источника света 11, бортового аккумулятора 12, первого 13 и второго 14 контроллеров управления двигателем, трехкомпонентного датчика линейных ускорений 15, прижимного трос-пояса 25. Позицией 24 обозначена обследуемая труба. В состав электронной аппаратуры 10 входят (Фиг.2): генератор 16 возбуждения вихретоковых датчиков, многоканальный фазочувствительный выпрямитель 17, устройство сбора датчиковой информации 18, датчик пути 19 (в составе опорного колеса 4), бортовой компьютер 20, устройство вывода исполнительных сигналов 22, датчик уровня краски в емкости краскопульта 23, радиоконтроллер 21.
Работает устройство следующим образом:
Устройство имеет малый вес, поэтому может быть вручную установлено на верхней части стенки трубы 24 перпендикулярно ее продольной оси (Фиг.1). На ролик 5 накидывают трос-пояс 25 и опоясывают его вокруг цилиндра трубы 24. Прижимают отжимной рычаг 6 по направлению к стенке трубы 26 и застегивают карабин на концах гибкого трос-пояса 25. Отпускают отжимной рычаг 6. Под действием пружины 7 рычаг 6 отжимается в направлении, перпендикулярном стенке трубы 24, и ролик 5 начинает давить на трос-пояс 25. Трос-пояс 25 натягивается, в результате чего ходовые колеса 2.1, 2.2 и опорное колесо 4 прижимаются к наружной стенке трубы. Сила пружины выбирается достаточной для удержания тросом тележки дефектоскопа в прижатом к трубе состоянии в нижней точке под трубой. В память бортового компьютера 20 из переносного компьютера через радиоконтроллер 21 по радиоканалу вводится значение шага ΔS продольной винтовой линии сканирования трубы или угол ψ* наклона траектории движения дефектоскопа (как дополнительный угол к продольной оси трубы 24). В память бортового компьютера 20 вводится также значение скорости Vпр продольного движения дефектоскопа и предельная величина сигнала от дефекта, при которой должен срабатывать краскопульт 9. При поступлении по радиоканалу пускового сигнала бортовой компьютер 20 (Фиг.2) выдает в первый 13 и второй 14 контроллеры управления двигателями-редукторами 3.1 и 3.2 одинаковые по величине сигналы управления двигателями. С выхода контроллера управления двигателем 13 напряжение подается на обмотки первого электродвигателя-редуктора 3.1. С выхода контроллера управления двигателем 14 напряжение подается на обмотки второго электродвигателя-редуктора 3.2. Валы электродвигателей начинают вращаться с одинаковой скоростью. Вращение с вала от первого мотор-редуктора 3.1 передается на вал первого ведущего колеса 2.1, а с вала второго мотор-редуктора 3.2 вращение передается на вал второго ведущего колеса 2.2. Тележка устройства приходит в движение по окружности вокруг трубы 24 (Фиг.1).
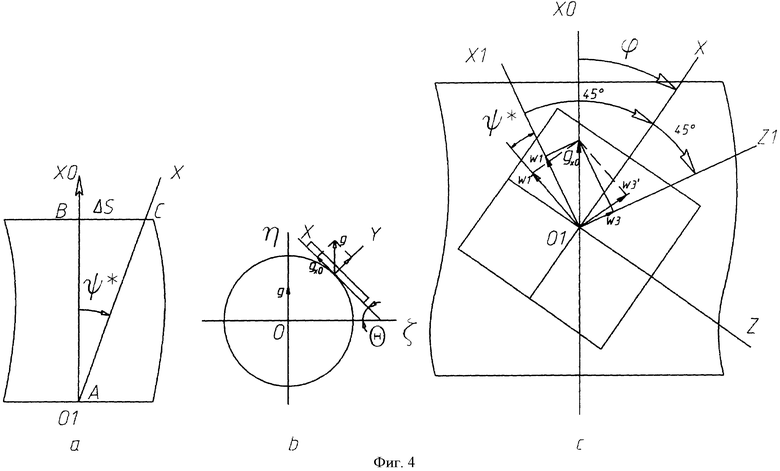
Для объяснения работы системы обеспечения требуемой траектории движения аппарата по наружной стенке трубы обратимся к Фиг.3,где изображен отрезок трубы 24. С трубой 24 связана неподвижная система координат Оξηζ. Центр О системы координат Оξηζ лежит на продольной оси трубы 24, ось Оξ совпадает с продольной осью трубы, ось Оη направлена вертикально вверх и совпадает с вертикалью Земли. При этом ускорение g силы земного тяготения направлено вдоль оси Oη. Ось Оζ направлена вправо.
Система координат O1XYZ жестко связана с плоскостью рамы 1 тележки устройства. При этом центр O1 системы координат O1XYZ совпадает с геометрическим центром рамы 1 тележки. Оси О1Х и O1Z лежат в плоскости рамы, причем ось O1X совпадает с продольной строительной осью рамы 1, а ось O1Z направлена вправо. Ось O1Y перпендикулярна плоскости рамы 1. Воображаемая линия О1Х0 пересечения плоскости Оηζ с плоскостью O1XZ всегда перпендикулярна проекции продольной оси Оξ трубы 24 на плоскость рамы 1.
Система координат O1X1Y1Z1 трехкомпонентного датчика линейных ускорений 15 также жестко связана с рамой 1 подвижной тележки. При этом плоскость O1X1Z1 совпадает с плоскостью O1XZ, а ось O1Y1 совпадает с осью O1Y. Плоскость O1X1Z1 повернута вокруг оси O1Y против часовой стрелки так, что между осями O1X и O1X1 образуется угол 45°, такой же угол образуется между осями O1Z и O1Z1.
В таком исходном положении линия O1X0 является биссектрисой угла X1O1Z1.
На чертеже (Фиг.4а) показана развертка на плоскости цилиндра трубы 24. Спиральная траектория движения тележки вокруг трубы на плоскости развертки отобразится в виде прямой линии АС в треугольнике ABC, образованном длиной окружности трубы Lт=πDn=АВ (Dn - наружный диаметр трубы) и шагом спирали ΔS=BC. Из чертежа видно, что шаг ΔS спирального движения будет соблюдаться, если продольная ось O1X тележки будет совпадать с линией АС, а лежащая на плоскости рамы тележки линия О1Х0 будет совпадать с линией АВ. Второе условие выполняется всегда. Выполнение первого условия должна обеспечить система управления движением аппарата.
Чтобы выполнить условие удерживания оси ОХ на линии АС, нужно повернуть тележку по часовой стрелке (для нашего чертежа) на угол ψ*
 .
.
При подготовке к работе в бортовой компьютер 20 по радиоканалу через радиоконтроллер 21 из переносного компьютера (на чертеже не показан) вводится диаметр Dn обследуемой трубы 24 и требуемый шаг сканирования ΔS. В бортовом компьютере 20 производится вычисление угла ψ* по формуле 1. Предположим, что тележка дефектоскопа находится в произвольном положении на стенке трубы 26 и ось O1X лежит в плоскости Oηζ и совпадает с линией O1X0, но наклонена к оси Оζ под углом θ (Фиг.4b). Вектор ускорения земного тяготения проецируется на ось O1X0 в виде компоненты
 .
.
Оси чувствительности акселерометров трехкомпонентного датчика ускорений 15 ориентированы по осям трехгранника O1X1Y1Z1:W1 по оси O1X1, W2 по оси O1Y1, W3 по оси O1Z1 (Фиг.4с). Если трехгранник O1X1Y1Z1 вращать на угол ϕ вокруг оси O1Z1, то на выходах акселерометров W1 и W3 будут изменяться сигналы в соответствии с выражениями:


 ,
,
ϕ - произвольный угол. 0°<ϕ<360°.
Величина ускорения gxo находится из выражения:

Знак ускорения gxo совпадает со знаком ускорений W1 и W3, измеряемых акселерометрами, ориентированными по осям O1X1 и O1Z1.
Угол θ, необходимый для оценки окружного положения дефектного места на трубе, может быть определен из выражения

A=sing(W1)
где А - знак функции, соответствующий знаку ускорения W1.
Считаем, что дефектоскоп будет перемещаться вдоль трубы слева-направо. Повернем математически в процессоре бортового компьютера систему координат O1X1Y1Z1 вокруг оси O1Z1 против часовой стрелки на угол ψ*, вычисленный по формуле (1) (Фиг.4с). Ускорения W′1 и W′3, вычисленные для акселерометров после математического поворота осей O1X1 и O1Z1 на фиксированный угол ψ* и произвольный угол ϕ, могут быть представлены в соответствии с выражениями:


Вычислим в процессоре бортового компьютера разность

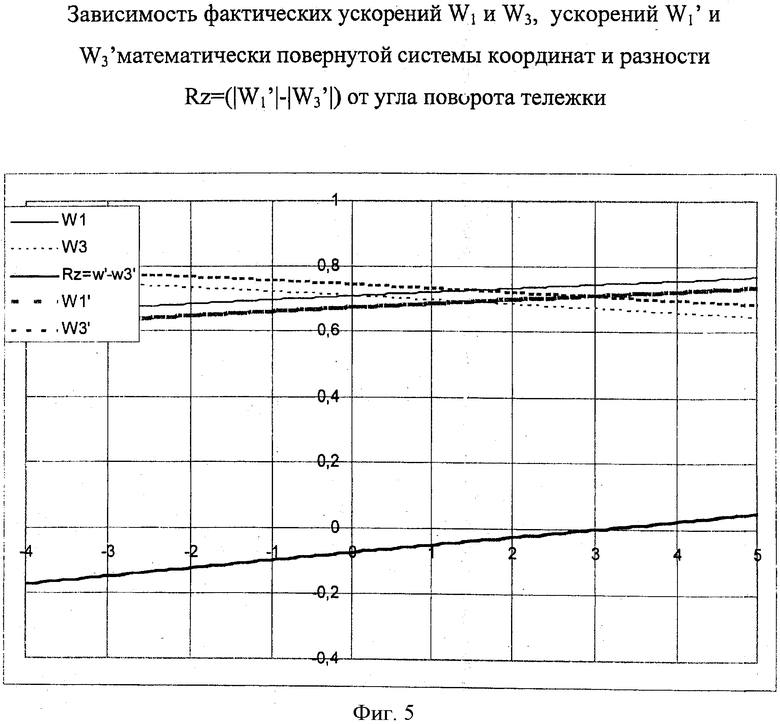
На чертеже (Фиг.5) показаны графики изменения значения ускорений W1, W3, W′1, W′3 и разности Rz при вращении системы координат O1X1Y1Z1 вокруг оси O1Z1 по часовой стрелке на угол ϕ, при θ=90 градусов и значении угла ψ*=3 градуса. Из графиков видно, что разность Rz линейно изменяет свою величину при изменении угла ϕ, а при значении ϕ>ψ*=3°, знак Rz изменяется.
Такая зависимость позволяет использовать Rz в качестве функции, управляющей разворотом тележки 1 на заданный угол ψ* сканирования и автоматического удержания ее на этой траектории. Процессор бортового компьютера 21 с заданной периодичностью вычисляет Rz и формирует сигнал управления скоростью вращения двигателей 3.1 и 3.2. Из курса физики известно, что скорость n вращения электродвигателя пропорциональна напряжению питания двигателя:

где Кэ - электромеханический коэффициент конкретного двигателя;
U - напряжение питания двигателя.
Если принять:
Vпр - продольная скорость перемещения дефектоскопа по трубе вдоль оси Оξ,
ψ* - угол наклона винтовой линии сканирования, то скорость перемещения дефектоскопа вдоль спиральной линии будет:

Если Dк - диаметр ходового колеса 2.1 (2.2), i=nк/n - коэффициент редукции оборотов ходового редуктора в мотор-редукторах (3.1 и 3.2), nк - скорость вращении ходового колеса, то линейная скорость обода ходового колеса будет

Для обеспечения требуемой скорости перемещения тележки по спиральной траектории на поверхности трубы необходимо на двигатели подать напряжение

Если напряжение Uл питания левого двигателя 3.1 сформировать пропорционально величине (1+K1·Rz)

а напряжение питания правого двигателя 3.2 сформировать пропорционально величине (1-K1·Rz),

где К1 - коэффициент усиления, обеспечивающий требуемое приращение скорости вращения двигателя, то скорости вращения двигателей будут различны, и тележка начнет поворачиваться в ту или другую сторону в зависимости от значений ускорений W1, W3 и заданного угла ψ*.
Движение тележки вокруг трубы будет сопровождаться изменениями величины проекции ускорения g силы земного тяготения на линию О1Х0 (Фиг.3). Это будет приводить к изменению разности скоростей вращения левого 3.1 и правого двигателей 3.2 в зависимости от положения тележки на трубе 24. Для верхней и нижней точек на трубе скорости Uл (15) и Uп (16) будут одинаковы, так как проекция g на плоскость X1O1Z1 будет равна нулю, и W1 W3 также будут равны нулю и в соответствии (10) Rz=0. При положении тележки на боковых сторонах стенки трубы разность скоростей будет наибольшей. Как видно из чертежа (Фиг.5) при выходе на заданный угол траектории ψ*, разность Rz станет равной нулю и оба двигателя 3.1 и 3.2 будут вращаться с одинаковой скоростью. При появлении отклонения от заданного угла ψ* траектории опять появится разница в скоростях вращения двигателей, и тележка опять будет выходить на заданную траекторию.
При движении тележки вокруг трубы 24 изменяется пространственная ориентация строительных осей дефектоскопа и осей чувствительности акселерометров трехкомпонентного датчика линейных ускорений. Ось чувствительности W1 первого акселерометра трехкомпонентного датчика линейных ускорений 15 повернута против часовой стрелки на угол 45 градусов относительно строительной оси O1X1 дефектоскопа, а ось чувствительности W3 второго акселерометра трехкомпонентного датчика линейных ускорений 15 повернута на 45 градусов против часовой стрелки относительно строительной оси O1Z1 дефектоскопа. Сигналы ускорений с выходов акселерометров датчика линейных ускорений 15 поступают в устройство сбора датчиковой информации 18 и с ее выходов поступают на соответствующие входы бортового компьютера 20, где производятся вычисления в соответствии с формулами (7)-(16). Вычисленные значения напряжений управления левым 3.1 и правым 3.2 двигателями бортовой компьютер 20 выдает в контроллеры 13 и 14 управления электродвигателями-редукторами 3.1 и 3.2. При этом для рассматриваемого примера на двигатель 3.1 поступает большее по величине напряжение, а на двигатель 3.2 - меньшее. Двигатель 3.1 начинает вращаться быстрее, а двигатель 3.2 - медленнее. Тележка в процессе поступательного движения начинает поворачиваться вправо (в соответствие с Фиг.4). Бортовой компьютер 20 контролирует сигналы акселерометров, поступающие в него от трехкомпонентного датчика линейных ускорений 15 через устройство сбора датчиковой информации 18. Так как тележка дефектоскопа поступательно движется по окружности вокруг трубы, то плоскость размещения трехкомпонентного датчика ускорений 15 изменяет наклон относительно вектора Земного тяготения. При этом одновременно изменяется значение выходных напряжений акселерометров трехкомпонентного датчика линейных ускорений 15, ориентированных по осям О1Х1 и O1Z1. Компьютер 20 контролирует величину Rz как результат вычислений по формуле (10). В тот момент, когда значение угла α будет равно заданному углу ψ*, компьютер начинает выдавать на контроллеры 13 и 14 управления электродвигателями-редукторами 3.1 и 3.2 одинаковые напряжения. Когда дефектоскоп будет находиться в верхней или нижней точке трубы, проекция вектора g ускорения Земного тяготения на оси O1X1 и O1Z1 будет иметь нулевое значение и напряжения управления двигателями опять будут одинаковыми. Когда дефектоскоп находится на боковой поверхности трубы и угол θ=0°, значения проекций g на оси чувствительности W1 и W3 акселерометров достигают максимума. Если угол между направлением оси О1Х и линией O1X0 окажется больше чем ψ*, т.е. φ>ψ*, то знак Rz изменится на противоположный, и скорость вращения правого 14 электродвигателя будет больше скорости вращения левого 13 электродвигателя. Тележка будет поворачиваться против часовой стрелки, и курсовая ошибка начнет компенсироваться. Во время перемещения дефектоскопа по спиральной траектории вокруг трубы участок трос-пояса 25, находящийся на ролике 5, начинает смещаться на малую величину вдоль трубы. Так как трение троса о стенку трубы мало (особенно, если трос-пояс выполнен из кевлара), то обегающая окружность трубы тележка начинает постепенно смещать трос-пояс на величину шага ΔS вдоль трубы 24 при каждом обороте. При перемещении тележки включается генератор 16 возбуждения вихретоковых датчиков 8 [Неразрушающий контроль и диагностика: Справочник / В.В.Клюев, Ф.Р.Соснин, В.Н.Филинов и др. Под ред. В.В.Клюева. - М.: Машиностроение, 1995. - 488 с., ил.]. Катушки возбуждения вихретоковых датчиков 8 при протекании по ним переменного тока возбуждают в металле стенки трубы 24 вихревые токи, магнитное поле которых зависит от изменений толщины стенки трубы. При этом вихревые токи наводят электродвижущую силу (ЭДС) в приемных катушках вихретоковых датчиков 8. Сигналы с приемных катушек вихретоковых датчиков 8 поступают на первую группу входов многоканальных фазочувствительных выпрямителей 17. На вторую группу входов многоканальных фазочувствительных выпрямителей 17 подается в качестве опорного сигнал с генератора возбуждения 16 вихретоковых датчиков 8. Напряжение, пропорциональное сдвигу фазы переменного напряжения на выходе каждой приемной катушки группы вихретоковых датчиков 8 относительно опорного напряжения, поступает с выходов фазочувствительных выпрямителей 17 на соответствующие входы устройство сбора датчиковой информации 18, и в соответствующие моменты передается из устройства сбора датчиковой информации 18 в бортовой компьютер 20. Программа бортового компьютера 20 анализирует величину сигналов, поступающих от вихретоковых датчиков 8. В тот момент, когда сигнал какого-либо вихретокового датчика 8 превысит заранее заданный уровень, бортовой компьютер 20 выдает через устройство вывода исполнительных сигналов 22 сигнал кратковременного включения краскопульта 9. Краска из сопла краскопульта выбрасывается импульсно на поверхность трубы 24 и окрашивает место в зоне расположения предполагаемого дефекта. Факт нанесения краски для привлечения внимания обслуживающего персонала сопровождается возбуждением импульсного осветителя 11 сигналом с устройства вывода исполнительных сигналов 22 по команде бортового компьютера 20. Сопла краскопульта 9 расположены в задней части тележки дефектоскопа на некотором удалении от соответствующих вихретоковых датчиков 8. Так как расстояние между соплами краскопульта 9 и вихретоковыми датчиками 8 является конструктивным параметром, то бортовой компьютер вычисляет число шагов одометра 19, после прохождения которого сопло будет располагаться над местом предполагаемого дефекта. Для измерения проходимого расстояния в бортовой компьютер 20 через устройство сбора датчиковой информации 18 вводятся сигналы пути с колесного одометра 19, конструктивно выполненного в опорном колесе 4, находящемся в кормовой части тележки дефектоскопа. Для проведения более строгого контроля за работой устройства бортовой компьютер связан с радиоконтроллером 21, через который осведомительная информация выдается в переносный компьютер. Это позволяет сохранять сведения об обнаруженных дефектах и координаты меток, нанесенных краской на трубу. Кроме того, на экран переносного компьютера выдается информация об окончании краски в краскопульте 9. Контроль за уровнем краски в краскопульте 9 производится датчиком 23, сигналы которого вводятся в бортовой компьютер 20 через устройство сбора датчиковой информации 18. В момент окончания краски в краскопульте 9 дефектоскоп перестает перемещаться по трубе, останавливаясь над ее верхней образующей. На борту дефектоскопа ведется протокол событий и регистрация в памяти бортового компьютера 20 всей диагностической информации, собранной во время движения по трубе: текущее время, координаты аномальных сигналов, величины аномальных сигналов. Эта информация может быть использована для детального анализа состояния стенки трубы, составления отчета и формирования архива для мониторинга трубопровода после его ремонта.
Проверка реализуемости подвижной механической части устройства.
Пусть:
1. Диаметр трубы Dn=1220 мм;
2. Желаемая скорость продольного сканирования (перемещения вдоль трубы) Vпрод = 1 м/мин = 0.016 м/с;
3. Ширина зоны контроля (длина линейки сенсоров Lлс или шаг спиральной полосы контроля Sпк) Lлс=Sпк=250 мм.
Вычислим:
1. Длина окружности контролируемой трубы Lот=πDn=π·1220=3833 мм;
2. Угол ψ наклона спирали полосы контроля к плоскости поперечного сечения трубы

3. Скорость касательная к спиральной линии движения тележки сканера

4. Коэффициент трения качения обрезиненных тянущих колес Ктк=0.1
5. Диаметр тянущих колес D1=2R1=0.25 м
6. Толщина ступицы тянущих колес t=0.01 м
7. Материал тянущих колес - алюминиевый сплав, плотность d=2700 кг/м3.
8. Масса тянущего колеса М=πD1 2·t·d/4=π·0.252·0.01·2700/4=0.42 кг
9. Масса 2х колес М1=2М=0.84 кг
10. Опорное колесо стальное. Диаметр D2=0.07 м, толщина t2=0.005 м, плотность d2=7800 кг/м3.
Масса опорного колеса М2=πD2 2·t2·d2/4=π·0.072·0.005·7800/4=0.165 кг
М2=0.165 кг
11. Рама тележки. Материал - алюминиевый сплав. Плотность d3=2700 кг/м3. Длина рамы L=0.5 м, ширина рамы В=0.3 м, высота рамы Н=0.05 м, толщина рамы t3=0.02 м.
Масса рамы M3=2·L·H·t·d3+2B·H·t·d3=2(0.5+0.3)·0.05·0.02·2700=4.3 кг
М3=4.3 кг
12. Массу прижимного рычага примем равной М4=0.25 М3=1. кг
13. Двигатель бесщеточный фирмы MAXON MOTOR EC 30 - ЕС 45: масса 0.088 кг
14. Планетарный редуктор фирмы Harmonic Drive AG масса 0.2-0.4 кг
15. Масса двух двигателей и двух редукторов М5=2·0.1+2·0.4=1.0 кг
16. Масса аккумулятора 10 Ач, напряжение 12 В М6=3 кг
17. Краскопульт массой М7=1 кг
18 Масса металлоконструкции Ммк=11.4 кг
19. Положим массу электронного оборудования равной М8=3 кг
20. Общая масса устройства Мобщ=15 кг
21. Когда устройство будет находиться на боковой части стенки трубы, сила трения ходовых колес должна быть равна или должна превышать вес устройства. Коэффициент трения сталь/резина равен Кср=0.3-0.4. Чтобы колеса не скользили по трубе, сила трения должна по крайней мере быть равной силе тяжести 15 кг. Следовательно, сила прижима устройства к стенке трубы должна быть равна F=P/Kcp=15/0.3=50 кг
22. Когда устройство будет находиться в самой верхней части трубы, на все колеса будет давить сила, равная силе прижима трос-пояса плюс вес изделия, т.е. Fвт=F+P=15+50=65 кг.
23. Если конструкцию выполнить так, чтобы вектор прижимной силы проходил через центр посередине оси, проходящей через центры ходовых колес, то можно считать, что все прижимное усилие и половина веса прижимает колеса в верхней точка трубы. Будем считать, что вся сила Fвт=65 давит на ходовые колеса. В этом случае вращающий момент на колесах должен быть Мврх=Fвт·Kтк·R1=65·0.1·0.25/2=0.81 кгм
24. Мощность, необходимая для движения устройства в верхней части трубы со скоростью V=0.25m/c, будет Рв=V·Мврх=0.25·0.81=0.2 кгм/с=2 Вт
25. При положении устройства на боковой стенке трубы и движении вверх колеса должны преодолевать скатывающую силу, равную весу устройства плюс сила трения от давления прижимающего трос-пояса, т.е. Fбок1=1 5+50·0.1=20 кг.
Вращающий момент на тянущих колесах в этом случае должен быть Мбв=Рбок1·R1=20·0.25/2=2.5 кгм
26. Мощность на ходовых колесах должна быть в этом случае
Pбв=Mбв·V=2.5·0.25=0.625 кгм=6.1 Вт
27. Мощность Рбн, требуемая для перемещения устройства от верхней точки в нижнюю часть трубы, будет меньше, чем мощность Рбв, требуемая для перемещения снизу вверх. Для простоты расчета положим обе мощности одинаковыми и равными наибольшей, т.е. Рбн=Рбв+6.1 Вт
28. Аналогично положим равными мощность Рн, требуемую для перемещения устройства в донной части трубы и мощность Рв=2 Вт, требуемую для перемещения в верхней части трубы, т.е. Рн=Рв+2 Вт
29. Учитывая симметрию траектории вращения вокруг трубы, примем среднюю мощность Рср, потребляемую при движении вокруг трубы, равной
Рср=0.5·(Рв+Рн)=0.5·(6.1+2)=4 Вт
30. КПД волнового редуктора оборотов достигает 90% [], КПД бесщеточного двигателя «MAXON» достигает 85-90%. Суммарный КПД мотор-редуктора будет Кмр=0.90·0.9=0.81
31. Средняя мощность Рд, потребляемая двумя двигателями, будет равна
Рд=Рср/Кмр=4/0.81=5 Вт
32. Средний ток Iдв, потребляемый от аккумулятора с напряжением Ua=12 В, будет Iдв=Рд/Uа=5/12=0.42 А
33. Емкость Qa аккумулятора, необходимая для Тр=8 часов работы устройства, будет равна Qa=Iдв·Tp=0.42·8=3.36 Ач
34. Аккумуляторная батарея может быть сформирована из 10 банок герметичных никель-кадмиевых аккумуляторов типа КНГ-5.5, емкостью 5.5 Ач, напряжение банки 1.25 В, что даст батарею 12 В × 5.5 Ач, способную обеспечить электроэнергией устройство более чем 8 часов. Вес одной банки 230 г [Справочник конструктора РЭА: Общие принципы конструирования / Под ред. Р.Г.Варламова. - М.: Сов. Радио, 1980. - 489 с., ил.]
Вес батареи из 10 банок не превысит 3 кг, принятых для аккумуляторной батареи вначале оценочного расчета (пункт 16). Вывод.
Оценочный расчет показывает, что подвижная механическая часть устройства может быть выполнена с минимальным весом с использованием современных двигателей, редукторов оборотов и аккумуляторов электроэнергии. Информационно-измерительная часть и привод реализуются с использованием электронных комплектующих и встраиваемых ЭВМ или микроконтроллеров, запрограммированных в соответствии с требуемым алгоритмом.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАРУЖНЫЙ СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2013 |
|
RU2539777C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНОК ТРУБОПРОВОДОВ | 2011 |
|
RU2453835C1 |
| КОМПЛЕКС ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ С ТРОСОВОЙ ПРОТЯЖКОЙ | 2015 |
|
RU2586258C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| КОМПЛЕКС ДЛЯ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2012 |
|
RU2511057C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРУБОПРОВОДА | 2009 |
|
RU2390769C1 |
| КОМПЛЕКС ДЕФЕКТОСКОПИИ ТЕХНОЛОГИЧЕСКИХ ТРУБОПРОВОДОВ | 2012 |
|
RU2516364C1 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2010 |
|
RU2439548C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И РЕГИСТРАЦИИ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРУБОПРОВОДОВ | 1994 |
|
RU2102704C1 |
| ПРЕОБРАЗОВАТЕЛЬ МАГНИТНОГО ПОЛЯ | 2006 |
|
RU2324195C1 |


Устройство предназначено для наружного неразрушающего контроля стенок труб непосредственно во время проведения их переизоляции. Технический результат заключается в минимизации веса и обеспечении автоматической разметки на трубе краской мест с недопустимыми дефектами. Устройство состоит из тележки и размещенной на ней электронной аппаратуры. Тележка с тремя колесами, два из которых - ходовые, а третье - опорное. Тележка сканирует наружную поверхность трубы группой вихретоковых датчиков и удерживается на поверхности трубы благодаря тросу, охватывающему трубу и подпружиненный прижимной ролик, закрепленный на верхней стороне тележки. Выведение тележки на требуемый угол спирали обеспечивается благодаря раздельному управлению скоростью вращения левого и правого ведущих колес. Выход на требуемую траекторию обеспечивается с использованием сигналов от двух акселерометров, расположенных в плоскости рамы тележки. Оси чувствительности акселерометров расположены под углом 90 градусов одна относительно другой так, чтобы продольная строительная ось тележки была расположена в середине между осями чувствительности акселерометров. Наличие третьего акселерометра, ось чувствительности которого перпендикулярна плоскости тележки, позволяет оценить положение тележки на окружности трубы. Колесный одометр счисляет пройденный аппаратом путь. Информация о координатах предполагаемых дефектов и их величине из бортового компьютера передается по радиоканалу в переносный компьютер для контроля оператором. 5 ил.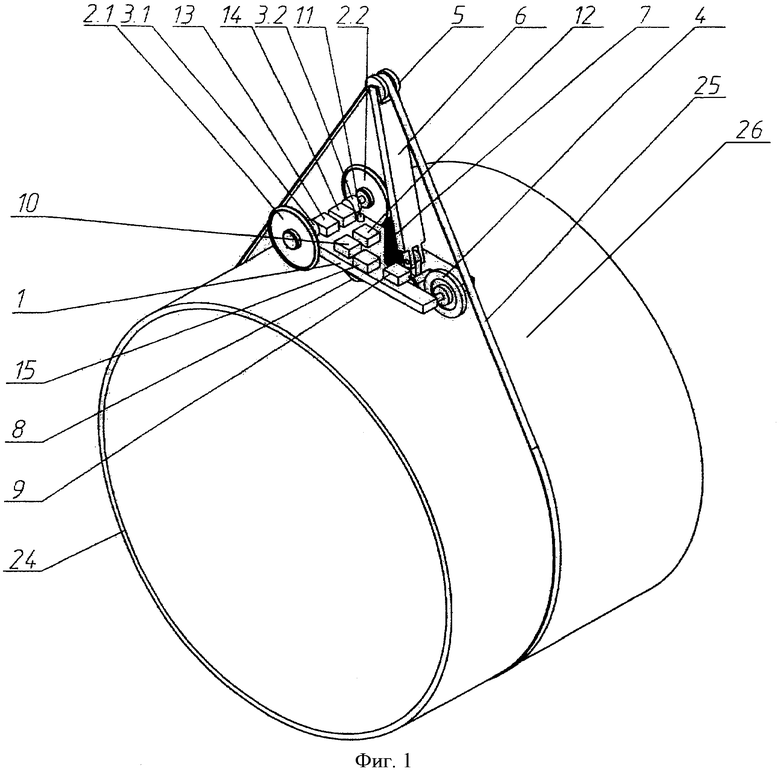
Дефектоскоп, содержащий тележку с несущей рамой, колесную ходовую подвеску, ходовой привод, автономный источник энергии, одометр, датчики средств неразрушающего контроля, устройство сбора информации с датчиков, бортовой компьютер, беспроводную систему передачи информации, отличающийся тем, что в него введены опорное колесо, трехкомпонентный датчик линейных ускорений, первый и второй контроллеры управления электродвигателями, устройство вывода исполнительных сигналов, электроуправляемый краскопульт, шкив, рычаг, пружина и гибкий трос-пояс, причем ходовой привод состоит из первого и второго колеса, первого и второго электромотора-редуктора, а датчики неразрушающего контроля выполнены в виде вихретоковых преобразователей, причем первое ходовое колесо установлено с левой стороны рамы, а его вал соединен с выходным валом первого электромотора-редуктора, провода питания которого соединены с соответствующими выходами первого контроллера управления электродвигателем, входы управления которого соединены с соответствующими выходами бортового компьютера; второе ходовое колесо установлено с правой стороны рамы, его вал соединен с выходным валом второго электромотора-редуктора, провода питания которого соединены с соответствующими выходами второго контроллера управления электродвигателем, входы управления которого соединены с соответствующими выходами бортового компьютера, трехкомпонентный датчик линейных ускорений установлен на раме так, что оси чувствительности двух его акселерометров лежат в плоскости рамы, а ось чувствительности третьего его акселерометра направлена перпендикулярно плоскости рамы, причем ось чувствительности первого акселерометра повернута вокруг оси чувствительности третьего акселерометра на 45° влево относительно продольной строительной оси рамы, а ось чувствительности второго акселерометра повернута оси чувствительности третьего акселерометра на 45° вправо относительно продольной строительной оси рамы, в задней нижней части рамы укреплено опорное колесо, а с верхней стороны рамы закреплен подпружиненный рычаг, на внешней стороне которого закреплен вращающийся шкив, в желобок которого входит гибкий трос-пояс с замком, опоясывающий кольцом по окружности трубу, по наружной цилиндрической поверхности которой может перемещаться на колесах тележка дефектоскопа, в нижней части которой укреплена линейка множества упомянутых вихретоковых датчиков поисковой системы неразрушающего контроля, выводы катушек возбуждения которых соединены с соответствующими выходами генератора возбуждения, а выходы измерительных катушек которых соединены с соответствующими входами множества фазочувствительных выпрямителей, выходы которых соединены с соответствующими входами устройства сбора информации с датчиков, информационные и управляющие входы которой соединены с соответствующими входами/выходами бортового компьютера, вход прерывания которого соединен с выходом датчика импульсов одометра, который размещен в опорном колесе, а выходы бортового компьютера, управляющие работой бортовых устройств, соединены с соответствующими входами устройства вывода исполнительных сигналов, выходы которого соединены с соответствующими входами управления соплами распылителей электроуправляемого краскопульта, причем интерфейсные выводы последовательного обмена бортового компьютера соединены с соответствующими выводами радиоконтроллера беспроводного интерфейса.
| Лозовский В.Н., Шелихов Г.С., Бондал А.Г., Ямпольский М.С | |||
| Диагностика МГ с применением «Магнитного дефектоскопа АМД-СТ» | |||
| Третья международная конференция «Обслуживание и ремонт газонефтепроводов» | |||
| Сб | |||
| докл | |||
| и сообщений | |||
| - г.Сочи, октябрь 2006 г., вып.2 | |||
| - М.: ООО «Геоинформмарк», 2007 | |||
| Деревянное стыковое устройство | 1920 |
|
SU163A1 |
| Солесос | 1922 |
|
SU29A1 |
| Губанок И.И., | |||

