Родственные заявки
[0001] Данная заявка притязает на приоритет предварительной заявки на патент (США) № 62/156495, поданной 4 мая 2015 года, содержимое которой полностью содержится в данном документе по ссылке.
Область техники, к которой относится изобретение
[0002] Варианты осуществления изобретения относятся к системам и способам для оценки дорожных условий в окружениях подземной добычи.
Уровень техники
[0003] Подземные транспортные средства и мобильное горное оборудование (т.е. "оборудование") въезжают и выезжают из шахты, а также перемещаются в районах добычи. В некоторых вариантах осуществления, плохие дорожные условия могут скрываться в силу воды, глины, обломков (например, угля или других минералов) и/или отсутствия освещения. Следовательно, плохие дорожные условия не всегда могут быть легко обнаруживаемыми, и в силу этого персонал шахты, отвечающий за содержание дорог, может не знать или не быть информирован относительно плохих дорожных условий.
[0004] Плохие или ухудшенные дорожные условия могут оказывать негативное влияние на оборудование, использующее дорогу. Эти эффекты могут включать в себя уменьшенный срок службы компонентов, более частые поломки и большее время простоя и увеличенные затраты на содержание. Например, оборудование, использующее дорогу, которая находится в плохом состоянии, испытывает более серьезные ударные и вибрационные нагрузки и в силу этого может страдать от уменьшенного ресурса компонентов и более частых поломок, чем оборудование, используемое на лучших дорогах. В свою очередь, это повышает затраты на содержание, уменьшает ресурс компонентов и машины и снижает выработку и эффективность выработки.
[0005] Кроме того, чтобы управлять ухудшением дорожных условий или разрешать плохие условия, горнодобывающий персонал типично должен проверять дороги и обнаруживать плохие условия (например, выбоины, уступы и т.д.) или основываться на другом персонале для того, чтобы сообщать плохие дорожные условия. Помимо этого, горнодобывающий персонал зачастую должен в плановом порядке содержать дороги, чтобы надежно предотвращать возникновение плохих условий. Тем не менее использование персонала для этих задач увеличивает затраты при добыче.
[0006] Сравнительный анализ между затратами, ассоциированными с плохими дорожными условиями, и (сниженными) затратами, ассоциированными с хорошими дорожными условиями, не является общеизвестным, поскольку отсутствуют точные, недорогие и воспроизводимые механизмы для сравнительного тестирования или оценки дорожных условий. Следовательно, некоторые горные работы не инвестируют в усилия по содержанию или ремонту дорог, поскольку отсутствует поддержка данных для того, чтобы оправдывать расход денег на то, чтобы улучшать дорожные условия.
Сущность изобретения
[0007] Соответственно, варианты осуществления изобретения предоставляют способы и системы для оценки дорожных условий в окружениях подземной добычи. В одной системе, мобильное устройство, используемое в окружениях подземной добычи, оснащено одним или более акселерометров на основе микроэлектромеханических систем (MEMS), которые могут использоваться для того, чтобы определять состояние дороги. Например, вертикальное (т.е. вверх-вниз) ускорение, сообщаемое посредством акселерометров, может служить признаком вертикального удара или толчка, который испытывает оборудование на дороге. Это удар может быть основан на скорости оборудования, дорожных условиях и состоянии системы подвески оборудования. Соответственно, данные ударов могут использоваться для того, чтобы определять условия дороги и обнаруживать плохие дорожные условия, которые могут включать в себя, в числе других условий, выбоины, уступы в дорожном покрытии и другие неровности.
[0008] Например, один вариант осуществления предоставляет систему, включающую в себя акселерометр, соединенный с горной машиной, и электронный процессор. Электронный процессор выполнен с возможностью принимать данные датчиков из акселерометра и принимать данные местоположения, ассоциированные с горной машиной. Электронный процессор также выполнен с возможностью определять первую точку данных, когда ускорение в первом направлении превышает предварительно определенное первое пороговое значение, на основе данных датчиков, определять вторую точку данных, когда ускорение во втором направлении, противоположном первому направлению, превышает предварительно определенное второе пороговое значение, на основе данных датчиков, определять местоположение состояния дороги, представленного посредством первой точки данных и второй точки данных, на основе данных местоположения. Помимо этого, электронный процессор выполнен с возможностью автоматически формировать и передавать электронное уведомление, по меньшей мере, по одной сети связи, причем электронное уведомление указывает местоположение.
[0009] Другой вариант осуществления предоставляет способ обнаружения состояния дороги окружения подземной добычи. Способ включает в себя прием, с помощью электронного процессора, данных датчиков из акселерометра, соединенного с горной машиной, работающей в окружении подземной добычи, и прием, с помощью электронного процессора, данных местоположения, ассоциированных с горной машиной, сформированных посредством устройства обнаружения позиции, ассоциированного с горной машиной. Способ также включает в себя определение, с помощью электронного процессора, первой точки данных, когда ускорение в первом направлении превышает предварительно определенное первое пороговое значение, на основе данных датчиков, определение, с помощью электронного процессора, второй точки данных, возникающей во времени после первой точки данных, когда ускорение во втором направлении, противоположном первому направлению, превышает предварительно определенное второе пороговое значение, на основе данных датчиков, и определение, с помощью электронного процессора, местоположения состояния дороги, ассоциированного с первой точкой данных и второй точкой данных, на основе данных местоположения. Помимо этого, способ включает в себя автоматическое обновление, с помощью электронного процессора, графической карты горной машины с индикатором, ассоциированным с местоположением состояния дороги.
[0010] Еще один другой вариант осуществления предоставляет способ обнаружения дорожных условий в окружении подземной добычи. Способ включает в себя прием, с помощью электронного процессора, данных датчиков из акселерометра, соединенного с горной машиной, работающей в окружении подземной добычи, и прием, с помощью электронного процессора, данных местоположения, ассоциированных с горной машиной, сформированных посредством устройства обнаружения позиции, ассоциированного с горной машиной. Способ также включает в себя определение, с помощью электронного процессора, показателя на основе данных датчиков, при этом показатель включает в себя максимальное ускорение в течение периода времени на основе данных датчиков, среднее ускорений в течение периода времени или число ускорений выше предварительно определенного порогового значения в течение периода и определение, с помощью электронного процессора, количественного показателя на основе показателя или производной показателя. Помимо этого, способ включает в себя назначение, с помощью электронного процессора, количественного показателя, по меньшей мере, для части дороги в окружении подземной добычи на основе данных местоположения и вывод, с помощью электронного процессора, количественного показателя, назначаемого части дороги.
[0011] Другие аспекты изобретения должны становиться очевидными при рассмотрении подробного описания и прилагаемых чертежей.
Краткое описание чертежей
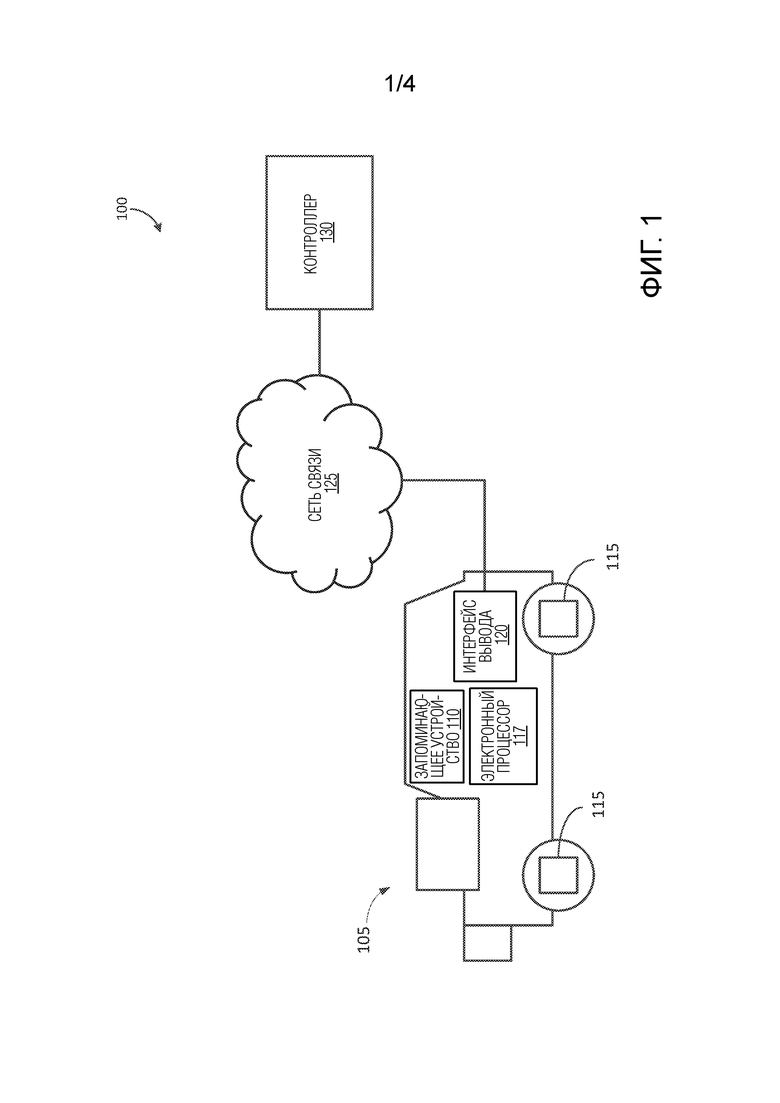
[0012] Фиг. 1 схематично иллюстрирует систему для определения состояния дороги согласно одному варианту осуществления.
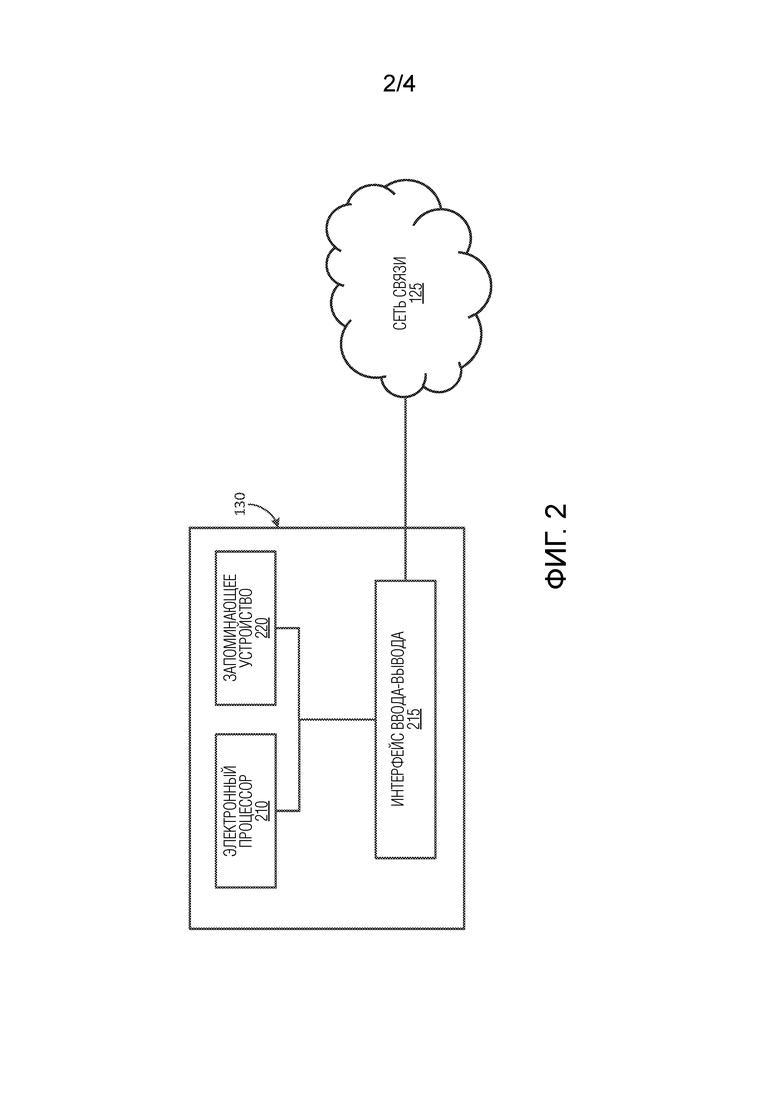
[0013] Фиг. 2 схематично иллюстрирует контроллер, включенный в систему по фиг. 1 согласно одному варианту осуществления.
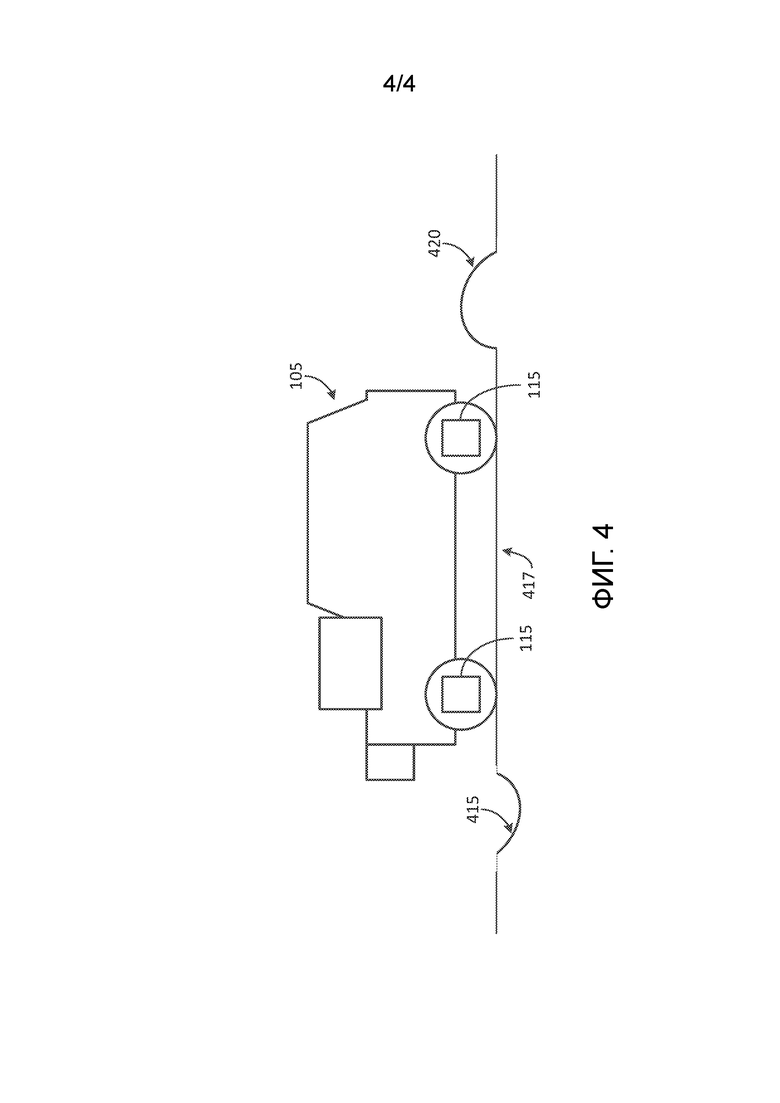
[0014] Фиг. 3 является блок-схемой последовательности операций, иллюстрирующей способ обнаружения состояния дороги, осуществляемый посредством контроллера по фиг. 2 согласно одному варианту осуществления.
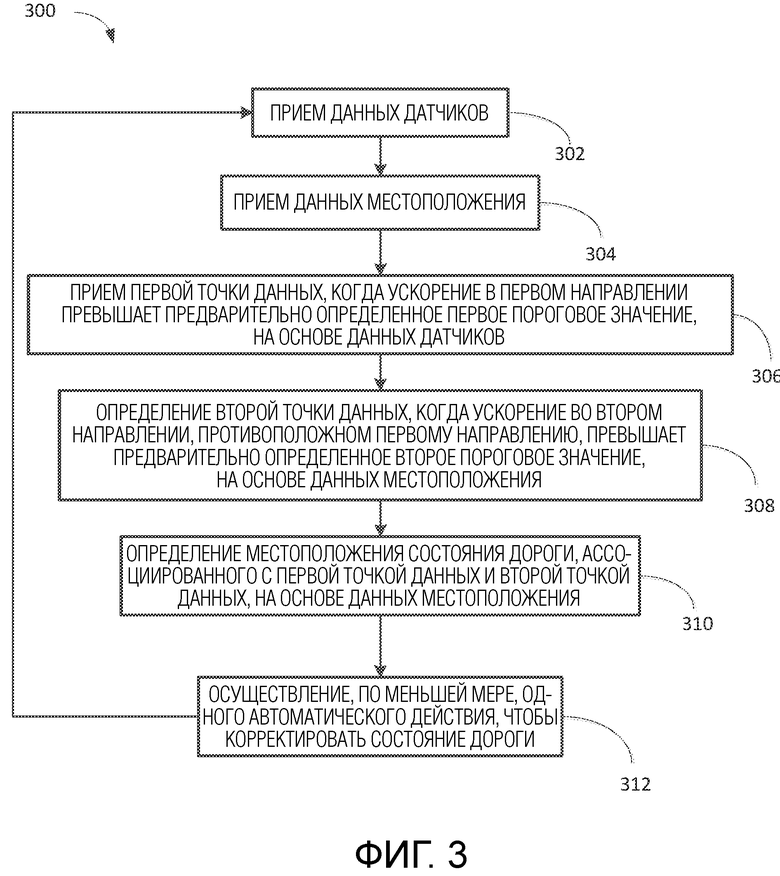
[0015] Фиг. 4 схематично иллюстрирует акселерометр, закрепленный на горной машине, двигающейся на дороге.
Подробное описание изобретения
[0016] Перед подробным описанием различных вариантов осуществления следует понимать, что изобретение не ограничено при применении подробностями конструкции и размещения компонентов, изложенными в нижеприведенном описании или проиллюстрированными на прилагаемых чертежах. Изобретение допускает другие варианты осуществления и может быть применено на практике или выполнено различными способами.
[0017] Кроме того, следует понимать, что формулировки и терминология, используемые в данном документе, служат только для описания и не должны рассматриваться как ограничивающие. Использование "включающий в себя", "содержащий" или "имеющий" и их вариантов имеет намерение содержать в себе элементы, перечисляемые далее, и их эквиваленты, а также дополнительные элементы. Термины "смонтированный", "соединенный (connected)" и "соединенный (coupled)" используются в широком смысле и охватывают прямой и косвенный монтаж, соединение (connection) или соединение (coupling). Дополнительно, "соединенный (connected)" и "соединенный (coupled)" не ограничены физическими или механическими соединениями (connection) или соединениями (coupling) и могут включать в себя электрические соединения (connection) или соединения (coupling), прямые или косвенные. Кроме того, электронная связь и уведомления могут выполняться с использованием любого известного средства, включающего в себя прямые соединения, беспроводные соединения и т.д.
[0018] Также следует отметить, что множество аппаратных и программных устройств, а также множество различных конструктивных компонентов может использоваться для того, чтобы реализовывать изобретение. Также следует отметить, что множество аппаратных и программных устройств, а также множество различных конструктивных компонентов может использоваться для того, чтобы реализовывать изобретение. Помимо этого, следует понимать, что варианты осуществления изобретения могут включать в себя аппаратные средства, программное обеспечение и электронные компоненты или модули, которые, для целей пояснения, могут быть проиллюстрированы и описаны, как если большинство компонентов реализовано исключительно в аппаратных средствах. Тем не менее специалисты в данной области техники на основе прочтения данного подробного описания должны признавать, что, по меньшей мере, в одном варианте осуществления, электронные аспекты изобретения могут реализовываться в программном обеспечении (например, сохраняться на энергонезависимом машиночитаемом носителе), выполняемом посредством одного или более процессоров. По сути, следует отметить, что множество аппаратных и программных устройств, а также множество различных конструктивных компонентов может использоваться для того, чтобы реализовывать изобретение. Например, "контроллер" и "модуль управления", приведенные в описании изобретения, могут включать в себя один или более процессоров, одни или более модулей запоминающих устройств, включающих в себя энергонезависимый машиночитаемый носитель, один или более интерфейсов ввода-вывода и различные соединения (например, системную шину), соединяющие компоненты.
[0019] Как отмечено выше, варианты осуществления изобретения предоставляют способы и системы для использования акселерометров, таких как акселерометры на основе микроэлектромеханических систем (MEMS), закрепленные на мобильном подземном горном оборудовании, чтобы обнаруживать дорожные условия в окружении подземной добычи. В частности, варианты осуществления изобретения используют данные, сформированные посредством акселерометров (т.е. "данные акселерометрических датчиков" или "данные датчиков"), для того чтобы анализировать абсолютную величину, длительность и повторное возникновение удара и толчка, которым подвергается оборудование, и сравнивать эту информацию с дорожными условиями.
[0020] Фиг. 1 схематично иллюстрирует систему 100 для обнаружения состояния дороги согласно одному варианту осуществления. Система 100 включает в себя горную машину 105. Горная машина 105 может представлять собой горный комбайн для поточной работы, бур, погрузчик, грузовик и т.п. Горная машина 105 включает в себя запоминающее устройство 110, акселерометр 115, электронный процессор 117 и интерфейс 120 вывода, которые соединены и обмениваются данными через одну или более линий связи (не показаны). Горная машина 105 может включать в себя меньшее число, больше число или другие компоненты по сравнению с тем, что проиллюстрировано на фиг. 1. Например, в некоторых вариантах осуществления, горная машина 105 включает в себя множество акселерометров, множество запоминающих устройств, множество интерфейсов вывода либо комбинацию вышеозначенного. Кроме того, в некоторых вариантах осуществления, интерфейс 120 вывода, запоминающее устройство 110, электронный процессор 117 либо комбинация вышеозначенного могут быть включены в акселерометр 115.
[0021] Акселерометр 115 формирует данные датчиков, указывающие величину ускорения в одном или более направлений или осей (например, абсолютную величину и направление ускорения). Например, в некоторых вариантах осуществления, акселерометр 115 формирует данные датчиков, представляющие ускорение в двух направлениях или осях (например, вверх-вниз). В других вариантах осуществления, акселерометр 115 сообщает ускорение в трех или более направлений или осей (например, вверх-вниз, слева направо, спереди назад либо комбинацию вышеозначенного). Ускорение в конкретном направлении может быть ассоциировано с нормальным или "неподвижным" значением. Соответственно, отклонение от этого значения указывает то, что горная машина 105 ускоряется в конкретном направлении. Например, отклонение от нормального или "неподвижного" значения в вертикальной оси указывает то, что горная машина 105 ускоряется вертикально (например, ускорение вверх или вниз). Как описано ниже, абсолютная величина, длительность и частота обнаруженных ускорений могут указывать серьезность толчка или удара для горной машины 105. В некоторых вариантах осуществления, акселерометр 115 представляет собой MEMS-акселерометр, который может включать в себя консольную балку и ускоряемую или сейсмическую массу. В некоторых вариантах осуществления, один или более акселерометров 115 соединяются с нижней стороной горной машины 105.
[0022] В некоторых вариантах осуществления, акселерометр 115 может включать в себя множество акселерометров, установленных на колесе или колесном блоке горной машины 105. Например, как проиллюстрировано на фиг. 1, акселерометр 115 может устанавливаться в одном или более колесных блоков горной машины 105. В некоторых вариантах осуществления, акселерометр 115 устанавливается в каждом колесном блоке горной машины 105. Тем не менее в других вариантах осуществления, акселерометр 115 устанавливается в двух колесных блоках горной машины 105 (т.е. на противоположных сторонах горной машины 105, к примеру, в левом переднем или заднем колесе и правом переднем или заднем колесе). Посредством установки акселерометров 115 в колесах или колесных блоках, акселерометры 115 измеряют прямые эффекты дороги, что означает то, что состояние дороги является непосредственным показателем, включающим в себя демпфирующие эффекты колеса. Кроме того, размещение акселерометра 115 на каждой стороне горной машины 105 (например, слева и справа) обеспечивает возможность акселерометрам 115 независимо измерять дорожные условия на каждой стороне дороги. Эта конфигурация акселерометров 115 также может использоваться на транспортном средстве с подвеской или без подвески, поскольку монтаж акселерометров 115 на колесе или колесном блоке исключает влияние подвески и обеспечивает непосредственное измерение эффекта дороги на колесо.
[0023] Акселерометры 115 также могут монтироваться в других местоположениях на горной машине 105. Например, один или более акселерометров 115 могут монтироваться на ходовой части горной машины 105. Монтаж акселерометра 115 на ходовой части может представлять собой просто проводной монтаж акселерометра 115 по сравнению с монтажом акселерометра 115 на колесе или колесном блоке. Этот сконфигурированный монтаж также может использоваться для транспортных средств с подвеской или без подвески. Например, для транспортного средства с подвеской, акселерометры 115 могут монтироваться над осями без подвески и далеко от осей с подвеской и на большом расстоянии друг от друга слева направо. Кроме того, в транспортном средстве с подвеской, отсутствует увеличение неподрессоренной массы транспортного средства, и в силу этого отсутствует снижающееся влияние на подвеску. Кроме того, в этой монтажной конфигурации, акселерометры могут монтироваться ближе к краю (например, спереди, сзади, слева или справа) горной машины 105, чтобы улучшать эффект дороги на акселерометр 115 (например, чтобы уравновешивать отсутствие чувствительности датчика). Аналогично, акселерометр 115 может монтироваться ближе к центру горной машины 105, чтобы ограничивать эффект дороги на акселерометр 115 (например, предотвращать насыщение или достижение пределов посредством датчика). Тем не менее монтаж акселерометров 115 не на колесах или на колесных блоках позволяет измерять дорожные условия, включающие в себя демпфирующие эффекты колес и подвески, что может не быть насколько точным, как измерение ускорения на колесах или на колесных блоках. В некоторых вариантах осуществления, могут разрабатываться математические модели для того, чтобы уравновешивать влияние подвески.
[0024] Кроме того, в некоторых вариантах осуществления, один акселерометр 115 может использоваться для того, чтобы сообщать дорожные условия на одной стороне горной машины 105 или среднее для обеих сторон, если акселерометр 115 монтируется в центре горной машины 105 (например, если горная машина представляет собой транспортное средство без подвески). Например, если акселерометр 115 представляет собой двухосный акселерометр (т.е. он обнаруживает ускорение в двух осях), акселерометр 115 может использоваться для того, чтобы определять наклон горной машины 105 слева направо, который может использоваться для того, чтобы определять то, варьируются или нет дорожные условия слева направо.
[0025] Запоминающее устройство 110 включает в себя энергонезависимый машиночитаемый носитель (например, постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM) и т.п.). Как описано ниже, в некоторых вариантах осуществления, запоминающее устройство 110 сохраняет данные датчиков, сформированные посредством акселерометра 115. В некоторых вариантах осуществления, запоминающее устройство 110 также сохраняет данные относительно горной машины 105, такие как скорость, местоположение и т.п.
[0026] Интерфейс 120 вывода выводит данные в устройства и сети, внешние для горной машины 105. Например, как проиллюстрировано на фиг. 1, интерфейс 120 вывода может вводить данные по сети 125 связи. Сеть 125 связи может включать в себя глобальную вычислительную сеть, к примеру, Интернет, локальную вычислительную сеть и т.п., использующую любые из множества протоколов связи, таких Wi-Fi, Bluetooth®, ZigBee и т.п. В некоторых вариантах осуществления, интерфейс 120 вывода включает в себя передатчик для беспроводной передачи данных по сети 125 связи. Альтернативно или помимо этого, интерфейс 120 вывода включает в себя порт для приема проводного соединения (например, кабеля, к примеру, Ethernet-кабеля) с сетью 125 связи.
[0027] В некоторых вариантах осуществления, интерфейс 120 вывода выводит данные, сохраненные в запоминающем устройстве 110. Например, в некоторых вариантах осуществления, запоминающее устройство 110 сохраняет данные датчиков, сформированные посредством акселерометра 115, данные относительно горной машины 105 либо комбинацию вышеозначенного. Эти данные могут сохраняться в запоминающем устройстве 110 до тех пор, пока сеть 125 связи не станет доступной. Когда сеть 125 связи доступна, интерфейс 120 вывода выводит данные, сохраненные в запоминающем устройстве 110, по сети 125 связи. Соответственно, запоминающее устройство 110 может выступать в качестве буфера для данных, выводимых посредством интерфейса 120 вывода, устройства долговременного хранения для данных либо для того и для другого. Кроме того, в некоторых вариантах осуществления, интерфейс 120 вывода может выводить данные, который не сохранены заблаговременно в запоминающем устройстве 110.
[0028] Данные, выводимые через интерфейс 120 вывода, могут выводиться в необработанной форме, обработанной форме либо как комбинация вышеозначенного. Например, данные могут шифроваться, сжиматься, фильтроваться, усредняться и т.п. Кроме того, в некоторых вариантах осуществления, данные, выводимые посредством интерфейса 120 вывода, могут приниматься из нескольких источников, к примеру, из нескольких запоминающих устройств или нескольких устройств. Например, в некоторых вариантах осуществления, данные, выводимые через интерфейс 120 вывода, включают в себя данные датчиков, сформированные посредством акселерометра 115, данные местоположения, сформированные посредством устройства обнаружения позиции (например, приемника на основе глобальной системы позиционирования (GPS) (если такие сигналы доступны в окружении добычи), радиочастотного приемо-передатчика, радарного приемо-передатчика, устройства счисления пути и т.п.), ассоциированного (например, включенного) с горной машиной 105, и данные скорости, сформированные посредством датчика скорости, включенного в горную машину 105. В некоторых вариантах осуществления, данные, выводимые через интерфейс 120 вывода, также могут включать в себя данные направления, указывающие направление скорости горной машины 105 (например, чтобы указывать скорость горной машины). В некоторых вариантах осуществления, датчик скорости, включенный в горную машину 105, может предоставлять как данные скорости, так и данные направления.
[0029] Электронный процессор 117 может включать в себя микропроцессор, специализированную интегральную схему или другое электронное устройство, которое выполняет инструкции (например, сохраненные в запоминающем устройстве 110). В частности, электронный процессор 117 выполняет инструкции для того, чтобы считывать данные из акселерометра 115 и сохранять данные в запоминающем устройстве 110. В некоторых вариантах осуществления, электронный процессор 117 также выполняет инструкции для того, чтобы считывать данные из запоминающего устройства 110 и выводить данные по интерфейсу 120 вывода, как описано выше.
[0030] В некоторых вариантах осуществления, электронный процессор 117 выполняет инструкции, чтобы сохранять все данные, считываемые из акселерометра 115. Альтернативно, электронный процессор 117 может выполнять инструкции для того, чтобы считывать данные из акселерометра и обрабатывать считываемые данные до сохранения в запоминающем устройстве 110 (или передачи через интерфейс 120 вывода). Например, электронный процессор 117 может выполнять инструкции (т.е. регистратор данных), которые считывают вывод из акселерометра 115 на частоте дискретизации, представляющей время между последовательными считываниями значений из акселерометра 115. Регистратор данных обрабатывает и обобщает выборки на частоте контура управления, которая представляет время, за которое считываемые выборки считываются, обрабатываются, обобщаются и записываются в запоминающее устройство 110. В некоторых вариантах осуществления, частота контура управления меньше частоты дискретизации. Например, в некоторых вариантах осуществления, первая частота дискретизации составляет приблизительно 1-10 миллисекунд, и вторая частота дискретизации составляет приблизительно 50 миллисекунд. Обработанные и обобщенные выборки могут включать в себя максимальное значение ускорения для одной или более осей, минимальное значение ускорения для одной или более осей, среднее положительных значений ускорения на оси для одной или более осей, среднее отрицательных значений ускорения на оси для одной или более осей, среднее значение ускорения для оси для одной или более осей и максимальный вектор.
[0031] В некоторых вариантах осуществления, максимальный вектор вычисляется с использованием следующего уравнения (1):
 (1)
(1)
Чтобы исключать некоторые необязательные вычисления, операция вычисления квадратного корня может опускаться, и может использоваться следующее уравнение (2):
 (2)
(2)
В уравнении (2), Xa представляет выборку a данных акселерометра на оси X, Ya представляет выборку a данных акселерометра на оси Y, и Za представляет выборку a данных акселерометра на оси Z. Соответственно, вектор может вычисляться для каждой выборки с использованием уравнения (2), и как только все векторы вычислены, вектор выборки с максимальным значением записывается в качестве максимального вектора. Альтернативно или помимо этого, могут записываться выборки (Xa, Ya и Za), ассоциированные с максимальным вектором.
[0032] Запись данных, как описано выше, может ограничивать объем данных, которые записываются (т.е. сохраняются в запоминающем устройстве 110). Кроме того, запись, как описано, может ограничивать объем данных, которые должны передаваться в контроллер 130 и обрабатываться посредством контроллера 130, как описано ниже. Частота дискретизации и частота контура управления могут регулироваться, чтобы удовлетворять полевым условиям, ограничениям аппаратных средств и датчиков, и контроллеров. Кроме того, как подробнее описано ниже относительно фиг. 3, обработанные дискретизированные данные по-прежнему предоставляют максимальное значение ускорения на одной или более осей, минимальное значение ускорения на одной или более осей, среднее положительное значение ускорения и отрицательные значение ускорения для одной или более осей и максимальный вектор. Из этих данных, может вычисляться максимальная разность на оси (например, минимальное значение ускорения минус максимальное значение ускорения). Кроме того, из этих данных, может вычисляться максимальная разность от среднего значения ускорения для оси (например, среднее значение ускорения минус максимальное значение ускорения и минимальное значение ускорения минус среднее значения). Кроме того, из этих данных, максимальный вектор может оцениваться и сравниваться между выборками. Соответственно, как описано ниже относительно фиг. 3, эти данные датчиков, принимаемые посредством контроллера 130, могут включать в себя дискретизированные данные, считываемые из акселерометра, обработанные и обобщенные данные, как описано выше, либо комбинацию вышеозначенного. Другими словами, множество точек данных, описанных ниже, могут включать в себя выборки, считываемые из акселерометра, обработанные и обобщенные выборки, сформированные посредством электронного процессора 117, либо комбинацию вышеозначенного.
[0033] Как проиллюстрировано на фиг. 1, контроллер 130 также обменивается данными с сетью 125 связи и принимает данные, выводимые посредством интерфейса 120 вывода. Как проиллюстрировано на фиг. 1, в некоторых вариантах осуществления, контроллер 130 расположен внешне относительно горной машины 150. Тем не менее в других вариантах осуществления, контроллер 130 может быть включен в горную машину 105. Кроме того, в некоторых вариантах осуществления, вся или часть функциональности, выполняемой посредством контроллера 130, описанного в данном документе, может выполняться посредством электронного процессора 117. Фиг. 2 схематично иллюстрирует контроллер 130 согласно одному варианту осуществления. Контроллер 130 может включать в себя электронный процессор 210, запоминающее устройство 220 и интерфейс 215 ввода-вывода. Электронный процессор 210, запоминающее устройство 220 и интерфейс 215 ввода-вывода соединены и обмениваются данными через одну или более линий связи. Контроллер 130 может включать в себя большее число, меньшее число или другие компоненты. Кроме того, следует понимать, что контроллер 130, как описано в настоящей заявке, может выполнять дополнительную функциональность, по сравнению функциональностью, описанной в данном документе. Кроме того, функциональность контроллера 130, как описано в данном документе, может быть распределена между более чем одним контроллером и более чем одним электронным процессором. Соответственно, функциональность, описанная в данном документе как выполняемая посредством электронного процессора 210, может выполняться посредством одного или более электронных процессоров, включенных в контроллер 130 или внешних для контроллера 130.
[0034] Электронный процессор 210 может включать в себя специализированную интегральную схему, микропроцессор или другое подходящее электронное устройство. Запоминающее устройство 220 включает в себя энергонезависимый машиночитаемый носитель (например, постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM) либо комбинацию вышеозначенного). Запоминающее устройство 220 сохраняет, в числе прочего, инструкции, выполняемые посредством электронного процессора 210, чтобы осуществлять способы, описанные в данном документе. В некоторых вариантах осуществления, запоминающее устройство 220 также сохраняет данные, принимаемые по сети 125 связи, включающие в себя, данные выводимые посредством интерфейса 120 вывода.
[0035] Интерфейс 215 ввода-вывода обменивается данными с устройствами и сетями, внешними для контроллера 130. Например, как проиллюстрировано на фиг. 2, интерфейс 215 ввода-вывода обменивается данными с сетью 125 связи. В частности, интерфейс 215 ввода-вывода может включать в себя передатчик для беспроводной передачи данных по сети 125 связи или порту для приема проводного соединения (например, кабеля, к примеру, Ethernet-кабеля) с сетью 125 связи. Данные, принимаемые посредством интерфейса 215 ввода-вывода, могут сохраняться в запоминающем устройстве 220. В некоторых вариантах осуществления, интерфейс 215 ввода-вывода принимает данные из сети 125 связи, выводит данные в сеть 125 связи либо и то, и другое. Кроме того, в некоторых вариантах осуществления, интерфейс 215 ввода-вывода может обмениваться данными с другими устройствами или сетями, внешними для контроллера 130. Например, в некоторых вариантах осуществления, интерфейс 215 ввода-вывода обменивается данными с другой сетью связи, отличающейся от сети 125 связи. Альтернативно или помимо этого, интерфейс 215 ввода-вывода может обмениваться данными с одним или более периферийных устройств, таких как дисплей, клавиатура, мышь, принтер и т.п., по сети связи или выделенному соединению.
[0036] В некоторых вариантах осуществления, в дополнение к приему данных по сети 125 связи или в качестве альтернативы к приему данных по сети 125 связи, контроллер 130 принимает данные через порт интерфейса 215 ввода-вывода. Например, в некоторых вариантах осуществления, интерфейс 215 ввода-вывода включает в себя порт для приема съемного запоминающего устройства, такого как съемное запоминающее устройство по стандарту универсальной последовательной шины (USB). В этих вариантах осуществления, горная машина 105 аналогично может иметь порт для приема съемного запоминающего устройства и сохранения данных (например, из запоминающего устройства 110) на съемном запоминающем устройстве. Соответственно, съемное запоминающее устройство может использоваться для того, чтобы передавать данные из горной машины 105, включающие в себя данные, сформированные посредством одного или более акселерометров 115, в контроллер 130 без использования сети 125 связи.
[0037] Как отмечено выше, электронный процессор 210, включенный в контроллер 130, выполнен с возможностью осуществлять инструкции (например, сохраненные в запоминающем устройстве 220), чтобы выполнять набор функций. Этот набор функций может включать в себя способ 300 обнаружения состояния дороги, как проиллюстрировано на фиг. 3. Если не указано в явной форме, порядок и последовательность способа 300 могут варьироваться относительно проиллюстрированного порядка и последовательности. Кроме того, как отмечено выше, части способа 300 могут осуществляться посредством множества электронных процессоров, включенных в контроллер 130 или внешних для контроллера 130. Например, в некоторых вариантах осуществления, способ 300 или его часть может осуществляться посредством электронного процессора 117, включенного в горную машину 105, электронного процессора 210 либо комбинации вышеозначенного.
[0038] Как проиллюстрировано на фиг. 3, способ 300 включает в себя прием, с помощью электронного процессора 210, данных датчиков из одного или более акселерометров 115 (на этапе 302). Как отмечено выше, данные датчиков могут сохраняться в запоминающем устройстве 110 и могут передаваться посредством интерфейса 120 вывода по сети 125 связи. Альтернативно или помимо этого, данные датчиков могут сохраняться на съемном запоминающем устройстве (например, на USB-устройстве), соединяемом с контроллером 130 через порт. Как описано выше, данные датчиков могут включать в себя точки данных, указывающие величину ускорения в одном или более направлений или осей (например, абсолютную величину и направление ускорения). В некоторых вариантах осуществления, данные датчиков могут быть основаны на времени таким образом, что ускорение, указываемое посредством точки данных, включенной в данные датчиков, может быть ассоциировано с конкретным временем (например, датой, временем дня и т.п.). Ассоциированная информация синхронизации может предоставляться посредством одного или более акселерометров 115 или отдельного устройства в горной машине 105. Как также описано выше, данные датчиков могут включать в себя данные, считываемые из акселерометра 115, обработанные данные, считываемые из акселерометра, либо комбинацию вышеозначенного.
[0039] Как проиллюстрировано на фиг. 3, способ 300 также включает в себя прием данных местоположения для горной машины 105 (на этапе 304). В некоторых вариантах осуществления, как отмечено выше, данные местоположения формируются посредством устройства обнаружения позиции, ассоциированного с горной машиной 150. Устройство обнаружения позиции может использовать спутниковые сигналы, RF-сигналы, радарные сигналы, сонарные сигналы, навигацию счислением пути, другие механизмы для идентификации географического местоположения горной машины 105 в окружении добычи.
[0040] Необязательно, в некоторых вариантах осуществления, способ 300 также включает в себя прием, с помощью электронного процессора 210, данных скорости и данных направления, ассоциированных с горной машиной 105. Как отмечено выше, данные скорости, данные направления либо и то, и другое могут формироваться посредством датчика скорости, включенного в горную машину 105.
[0041] Как описано выше, данные скорости, данные направления, данные местоположения либо комбинация вышеозначенного могут выводиться посредством интерфейса 120 вывода и приниматься посредством контроллера 130 по сети 125 связи. Альтернативно или помимо этого, данные скорости, данные направления, данные местоположения либо комбинация вышеозначенного могут сохраняться на съемном запоминающем устройстве, соединяемом с контроллером 130. Кроме того, в некоторых вариантах осуществления, данные скорости, данные направления, данные местоположения либо комбинация вышеозначенного принимаются из устройства, отдельного от горной машины 105. Например, в некоторых вариантах осуществления, система позиционирования, отдельная от горной машины 105, может отслеживать местоположение горной машины 105, может предоставлять данные местоположения в контроллер 130 через сеть 125 связи, отдельную сеть связи, выделенное соединение (например, съемное запоминающее устройство) либо комбинацию вышеозначенного.
[0042] Способ 300 также включает в себя определение, с помощью электронного процессора 210, первой точки данных, когда ускорение в первом направлении превышает предварительно определенное первое пороговое значение (на конкретной оси, к примеру, вертикальной оси), на основе данных датчиков (на этапе 306). Как отмечено выше, данные датчиков могут включать в себя множество точек данных, представляющих ускорения за период времени. Соответственно, электронный процессор 210 может быть выполнен с возможностью сравнивать ускорение, представленное посредством каждой точки данных (или совокупности точек данных, к примеру, среднее ускорение), с первым предварительно определенным пороговым значением, чтобы идентифицировать точку данных, ассоциированную с ускорением, которое превышает первое предварительно определенное пороговое значение. Первое предварительно определенное пороговое значение может варьироваться в зависимости от окружения, в котором работает горная машина 105, и других конфигурируемых настроек.
[0043] В некоторых вариантах осуществления, электронный процессор 210 может сравнивать первое пороговое значение с отдельным значением ускорения. Тем не менее как описано выше, в некоторых вариантах осуществления, электронный процессор 117 обрабатывает отдельные значения ускорения, чтобы предоставлять составные значения ускорения (например, минимальное значение ускорения, максимальное значение ускорения, среднее значение ускорения и т.п.). Соответственно, в некоторых вариантах осуществления, электронный процессор 210 может сравнивать первое пороговое значение с таким составным значением. Например, электронный процессор 210 может сравнивать максимальное значение ускорения с первым пороговым значением, может сравнивать разность между максимальным значением ускорения и минимальным значением ускорения с первым пороговым значением, может сравнивать разность между максимальным значением ускорения и средним значением ускорения с первым пороговым значением или может сравнивать разность между минимальным значением ускорения и средним значением ускорения с первым пороговым значением для того, чтобы идентифицировать первую точку данных. Аналогично, электронный процессор 210 может сравнивать максимальный вектор с первым пороговым значением для того, чтобы идентифицировать первую точку данных.
[0044] Помимо этого, способ 300 включает в себя определение, с помощью электронного процессора 210, второй точки данных, когда ускорение во втором направлении, противоположном первому направлению, превышает предварительно определенное второе пороговое значение, на основе данных датчиков (на этапе 308). Например, после идентификации первой точки данных, электронный процессор 210 может искать последующую точку данных (т.е. точки данных, возникающие во времени после первой точки данных), которая ассоциирована с ускорением, которое превышает второе пороговое значение и, в общем, находится в направлении, противостоящем первому направлению. В частности, как проиллюстрировано на фиг. 4, когда горная машина 105 проезжает по/через плохое состояние дороги, к примеру, выбоину 415, акселерометр 115 сначала регистрирует ускорение в направлении вниз (когда горная машина 105 попадает в выбоину 415), а затем регистрировать ускорение в направлении вверх (когда горная машина 105 выезжает из выбоины 415 и возвращается на поверхность дороги 417). Аналогично, когда горная машина 105 проезжает по обращенному вверх уступу 420, акселерометр 115 сначала регистрирует ускорение в направлении вверх (когда горная машина 105 проезжает поверх уступа 420), а затем, в зависимости от скорости горной машины 105, ускорение в направлении вниз (когда горная машина 105 перемещается из уступа 420 назад на поверхность дороги 417). Соответственно, электронный процессор 210 выполнен с возможностью идентифицировать эти условия посредством сравнения обнаруженного ускорения с конкретными пороговыми значениями, временными последовательностями либо и тем, и другим. Кроме того, следует понимать, что в горную машину 105 могут устанавливаться несколько акселерометров 115, которые могут использоваться для того, чтобы отслеживать дорожные условия (например, посредством сравнения с первым акселерометром, позиционированным в передней части горной машины, наезжает на выбоину, и когда второй акселерометр, позиционированный в задней части оборудования, наезжает на идентичную выбоину). Таким образом, идентификация конкретной последовательности предельных ускорений позволяет идентифицировать выбоины, уступы или другие дорожные условия. Как отмечено выше для первого предварительно определенного порогового значения, второе предварительно определенное пороговое значение может варьироваться в зависимости от окружения, в котором работает горная машина 105, и других конфигурируемых настроек. Кроме того, в некоторых вариантах осуществления, второе предварительно определенное пороговое значение, в общем, может быть равно, больше или меньше первого предварительно определенного порогового значения.
[0045] Способ 300 также включает в себя определение, с помощью электронного процессора 210, местоположения, ассоциированного с определенным расстоянием, на основе данных местоположения (на этапе 310). Например, электронный процессор 210 может использовать данные местоположения, чтобы идентифицировать то, где расположена горная машина 105, когда она подвергнута состоянию дороги, указываемому посредством первой точки данных и второй точки данных. В некоторых вариантах осуществления, электронный процессор 210 может идентифицировать первое местоположение горной машины 105 во время, ассоциированное с первой точкой данных, и второе местоположение горной машины 105 во время, ассоциированное со второй точкой данных. Линия, соединяющая первое местоположение и второе местоположение (регулируемое на основе данных направления), представляет местоположение, ассоциированное с обнаруженным состоянием дороги.
[0046] Способ 300 также включает в себя осуществление, с помощью электронного процессора 210, по меньшей мере, одного автоматического действия, чтобы корректировать обнаруженное состояние дороги (на этапе 312). В некоторых вариантах осуществления, автоматическое действие включает в себя формирование электронного уведомления (например, почтового сообщения, текстового сообщения, автоматизированного речевого сообщения и т.п.), которое включает в себя определенное местоположение. Электронный процессор 210 может передавать электронное уведомление в одно или более устройств, к примеру, в мобильный телефон, мобильную радиостанцию, планшетный компьютер и т.п., управляемых персоналом по содержанию и ремонту для окружения добычи горной машины 105 (например, по одной или более сетей связи). Электронное уведомление информирует персонал по содержанию и ремонту в отношении местоположения обнаруженного состояния дороги. Электронное уведомление также может информировать персонал по содержанию и ремонту в отношении других подробностей обнаруженного состояния дороги (например, типа состояния дороги (выбоина, уступ и т.д.), расстояния, глубины или другого измерения состояния дороги и т.п.).
[0047] Альтернативно или помимо этого, автоматическое действие может включать в себя формирование оповещения (например, визуального оповещения, звукового оповещения, тактильного оповещения либо комбинации вышеозначенного) в окружении добычи или за пределами окружения добычи. Например, в некоторых вариантах осуществления, различные устройства вывода (например, динамики, световые индикаторы и т.д.), позиционированные по всему окружению добычи, могут активироваться на основе определенного местоположения. Персонал по содержанию и ремонту затем может реагировать на оповещения, чтобы ремонтировать обнаруженные дорожные условия.
[0048] Альтернативно или помимо этого, автоматическое действие может включать в себя добавление местоположения на графическую карту окружения добычи горной машины 105. Например, графическая карта (двумерная или трехмерная) может отображаться на устройстве отображения для окружения добычи. Карта может иллюстрировать дороги в окружении добычи и также может включать в себя один или более графических или текстовых индикаторов для обнаруженных дорожных условий. Например, электронный процессор 210 может передавать данные в другое устройство, которое формирует и отображает карту. Данные, передаваемые посредством электронного процессора 210, могут указывать местоположение обнаруженного состояния дороги и, необязательно, другие подробности обнаруженного состояния дороги. Следовательно, карта, сформированная и отображаемая посредством другого устройства, может автоматически обновляться с обнаруженным состоянием дороги. Например, графический или текстовый индикатор может автоматически добавляться на карту в позиции, представляющей местоположение обнаруженного состояния дороги. Графический или текстовый индикатор также может быть основан на подробностях состояния дороги. Например, расстояние, которое охватывает обнаруженное состояние дороги, может оказывать влияние на метку, цвет, форму, размер, анимацию либо комбинацию означенного для индикатора, добавляемого на карту. Аналогично, глубина обнаруженного состояния дороги может оказывать влияние на метку, цвет, форму, размер или анимацию индикатора, добавляемого на карту. В некоторых вариантах осуществления, электронный процессор 210 может быть выполнен с возможностью формировать карту, отображать карту либо и то, и другое, что может означать то, что электронный процессор 210 не должен передавать данные относительно обнаруженных дорожных условий в другое устройство, чтобы обновлять карту.
[0049] Альтернативно или помимо этого, автоматическое действие может включать в себя сохранение данных (например, определенного местоположения и, необязательно, подробностей относительно состояния дороги, ассоциированного с местоположением) в запоминающем устройстве, доступном посредством одного или более устройств. Например, данные могут сохраняться на сервере приложений, который обеспечивает возможность устройствам (например, мобильным устройствам, мобильным радиостанциям, планшетным компьютерам и т.п.) осуществлять доступ к данным (например, с использованием приложения обозревателя или специализированного приложения, выполняемого посредством устройства). Аналогично, в некоторых вариантах осуществления, сохраненные данные могут использоваться для того, чтобы формировать один или более отчетов, таких как отслеживание изменения дорожных условий во времени. Кроме того, в некоторых вариантах осуществления, сохраненные данные могут комбинироваться с другой информацией, ассоциированной с горной машиной (например, временами и объемами выработки), чтобы ассоциировать (например, разрабатывать взаимосвязь) дорожные условия с данными затрат при добыче, данными выработки либо и с тем, и с другим.
[0050] В некоторых вариантах осуществления, электронный процессор 210 может быть выполнен с возможностью ранжировать обнаруженное состояние дороги, к примеру, на основе местоположения, расстояния, глубины и типа обнаруженного состояния дороги. Например, ранжирование может указывать порядок ремонта таким образом, что дорожные условия с более высоким рангом должны разрешаться посредством персонала по содержанию и ремонту до дорожных условий с более низким рангом. Эта информация ранжирования может быть включена в электронное уведомление, сформированное посредством электронного процессора 210, оповещение, сформированное посредством электронного процессора 210, либо включена в качестве данных, используемых для того, чтобы обновлять графическую карту окружения добычи (например, индикаторы для дорожных условий с ранжированием, превышающим пороговое значение, могут мигать, изменять цвет или иным образом отличаться от других индикаторов).
[0051] В некоторых вариантах осуществления, электронный процессор 210 может определять подробности обнаруженного состояния дороги и использовать подробности, чтобы определять то, следует или нет предпринимать автоматическое действие, либо, как отмечено выше, то, какое автоматическое действие следует предпринимать. Например, в некоторых вариантах осуществления, электронный процессор 210 выполнен с возможностью определять расстояние (например, ширину) обнаруженного состояния дороги. Электронный процессор 210 может использовать данные местоположения, чтобы определять расстояние. В других вариантах осуществления, электронный процессор 210 может использовать принимаемые данные скорости и данные направления, чтобы определять расстояние. Электронный процессор 210 может определять расстояние на основе времен, ассоциированных с каждой точкой данных, скорости горной машины 105 в/между временами (например, средней скорости между временами) и направления движения горной машины 105 в/между временами).
[0052] Электронный процессор 210 может сравнивать определенное расстояние с предварительно определенным расстоянием. Например, в некоторых вариантах осуществления, выбоина может обнаруживаться на основе первой точки данных и второй точки данных. Тем не менее расстояние, проезжаемое посредством горной машины 105 между точками данных, может быть настолько небольшим, что ремонт или коррекция выбоины может быть нецелесообразным. С другой стороны, в некоторых вариантах осуществления, расстояние между первой точкой данных и второй точкой данных может быть настолько большим, что первая точка данных и вторая точка данных указывают не выбоину, а вместо этого ухабы в различных местоположениях, которые могут не требовать ремонта. Соответственно, электронный процессор 210 может сравнивать определенное расстояние с минимальным расстоянием, максимальным расстоянием либо как фильтровать обнаруженные дорожные условия, так и исключать дорожные условия, которые могут не требовать ремонта. Кроме того, в некоторых вариантах осуществления, электронный процессор 210 использует определенное расстояние для того, чтобы ранжировать обнаруженные дорожные условия (например, чем шире состояние дороги, тем выше ранг). Предварительно определенные расстояния, используемые для сравнения с определенным расстоянием, могут варьироваться в зависимости от окружения, в котором работает горная машина 105, и других конфигурируемых настроек.
[0053] Кроме того, в некоторых вариантах осуществления, в дополнение или в качестве альтернативы обнаружению местоположений дорожных условий, требующих ремонта, на основе первой точки данных и второй точки данных, электронный процессор 210 может быть выполнен с возможностью классифицировать дорогу в окружении добычи или ее часть на основе данных датчиков. Например, электронный процессор 210 может быть выполнен с возможностью анализировать данные датчиков в вертикальном направлении вверх и в вертикальном направлении вниз независимо за предварительно определенный или регулируемый период времени, чтобы определять показатель, такой как (i) максимальное ускорение, (ii) среднее наибольших N ускорений (где N является регулируемым параметром), (iii) число ускорений выше предварительно определенного порогового значения либо комбинацию вышеозначенного. В частности, электронный процессор 210 может быть выполнен с возможностью определять показатель, который включает в себя максимальное изменение ускорения (например, сверху вниз или снизу вверх) за предварительно определенный или регулируемый период времени. Контроллер 130 использует показатель (или производную показателя, к примеру, среднее, медиану и т.п. показателя или нормализованную версию показателя) для того, чтобы задавать количественный показатель, указывающий дорожные условия. Соответственно, в этом варианте осуществления, дороге или отдельным частям дороги может назначаться количественный показатель, указывающий то, насколько хорошими или плохими являются дорожные условия. Эти количественные показатели могут быть включены в электронные уведомления, оповещения, карты, отчеты и ранжирование, как описано выше. Аналогично, первые точки данных и вторые точки данных, описанные выше, могут использоваться для того, чтобы обнаруживать плохие дорожные условия и число плохих дорожных условий, обнаруженных для конкретной дороги, или часть дороги может использоваться для того, чтобы формировать количественный показатель для дороги или части дороги. Например, электронный процессор 210 может быть выполнен с возможностью определять множество первых точек данных и множество вторых точек данных, определять число для множества местоположений и формировать количественный показатель для состояния дороги на основе числа для множества местоположений.
[0054] Кроме того, в некоторых вариантах осуществления, данные датчиков могут комбинироваться с другими данными относительно горной машины 105, такими как скорость горной машины 105 и подвеска горной машины 105 (например, радиус поворота горной машины 105), чтобы обнаруживать дорожные условия. Например, скорость, подвеска или другие данные относительно горной машины 105 могут комбинироваться с данными датчиков, чтобы нормализовать данные датчиков относительно конкретных для горной машины параметров, таких как скорость и состояние подвески.
[0055] В некоторых вариантах осуществления, данные датчиков, принимаемые из акселерометра 115, соединенного с горной машиной 105, могут комбинироваться с данными датчиков, принимаемыми из акселерометров, соединенных с другими горными машинами, работающими в окружении добычи. Например, данные датчиков, ассоциированные с несколькими горными машинами, могут комбинироваться, чтобы более точно формировать или надежно обнаруживать дорожные условия. Например, данные датчиков из нескольких горных машин могут комбинироваться, чтобы формировать средние количественные показатели или ранжирование, как описано выше.
[0056] Соответственно, варианты осуществления изобретения используют данные датчиков из одного или более акселерометров, чтобы идентифицировать местоположения вдоль подземной дороги, в которой регистрируются высокие показания акселерометра. Эти местоположения представляют области, в которых горные машины подвергаются сильным толчкам вследствие плохих дорожных условий. Как отмечено выше, эти области могут быть помечены в отчетах, которые могут использоваться персоналом по содержанию и ремонту для того, чтобы ремонтировать дорогу, или, альтернативно, могут использоваться для того, чтобы идентифицировать персонал, работающий на горных машинах в окружении добычи, который должен переобучаться (например, в ситуациях, когда ненадлежащие горные работы приводят к плохим дорожным условиям). Например, данные датчиков могут использоваться для того, чтобы задавать критерии классификации хороших дорог по сравнению с плохими дорогами (например, для графика содержания и ремонта, планирования маршрута и т.д.), предоставлять потребителям добычи исчерпывающую информацию относительно окружений добычи и ассоциированных затрат и рисков, предупреждать персонал, когда должны предприниматься корректирующие действия для того, чтобы разрешать плохие дорожные условия таким образом, чтобы приоритизировать ремонт дорог (например, на основе серьезности дорожных условий или частоты движения в плохих дорожных условиях), оценивать технологии содержания дорог, укреплять хорошие функциональные возможности содержания дорог, оценивать сравнительные затраты на содержание горных машин плохих по сравнению с хорошими дорожными условиями, предотвращать ранние отказы и увеличивать срок службы компонентов, уменьшать затраты на содержание, увеличивать выработку и эффективность выработки (например, уменьшать поломки, обеспечивать большие скорости работы оборудования вследствие хороших дорожных условий и т.д.) и уменьшать проверки дорог и ассоциированные затраты, включающие в себя трудозатраты.
[0057] Различные признаки и преимущества изобретения излагаются в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ СБОРА ОПЕРАЦИОННЫХ ДАННЫХ О ВИБРАЦИИ ДЛЯ ГОРНОЙ МАШИНЫ | 2016 |
|
RU2725832C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ НА ОСНОВАНИИ ПРЕДЫДУЩИХ ПОЕЗДОК | 2015 |
|
RU2692290C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ДЛЯ БЕСПИЛОТНОГО АВТОМОБИЛЯ (SDC) | 2019 |
|
RU2750243C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ МОНИТОРИНГА ВЫСОТЫ ВЫЕМКИ И ОБЪЕМА МАТЕРИАЛА, ВЫНИМАЕМОГО ДЛЯ ГОРНОЙ МАШИНЫ | 2016 |
|
RU2718888C2 |
| ФОРМИРОВАНИЕ МОДЕЛИРОВАННЫХ ДАННЫХ ДАТЧИКОВ ДЛЯ ОБУЧЕНИЯ И ПРОВЕРКИ ДОСТОВЕРНОСТИ МОДЕЛЕЙ ОБНАРУЖЕНИЯ | 2017 |
|
RU2694154C2 |
| СИСТЕМА ДЛЯ ОПИСАНИЯ СТИЛЯ ВОЖДЕНИЯ У ВОДИТЕЛЕЙ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2594046C2 |
| Система и способ обнаружения затупленных и изношенных резцов | 2016 |
|
RU2714396C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ЗАТУПЛЕННЫХ И ИЗНОШЕННЫХ РЕЗЦОВ | 2016 |
|
RU2728647C2 |
| Способ и система для прогнозирования маневра объекта | 2021 |
|
RU2778300C1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ АВТОМАТИЗИРОВАННОГО ОПРЕДЕЛЕНИЯ ПРИСУТСТВИЯ ОБЪЕКТОВ | 2019 |
|
RU2769921C2 |

Группа изобретений относится к области оценки дорожных условий в окружениях подземной добычи. Система оценки дорожных условий в окружении подземной добычи включает в себя электронный процессор, который принимает данные датчиков из акселерометра и данные местоположения горной машины, работающей в окружении добычи. Электронный процессор определяет, на основе данных датчиков, первую точку данных, когда ускорение в первом направлении превышает предварительно определенное первое пороговое значение, на основе данных датчиков и определяет вторую точку данных, когда ускорение во втором направлении, противоположном первому направлению, превышает предварительно определенное второе пороговое значение. Электронный процессор также определяет местоположение состояния дороги, ассоциированного с первой точкой данных и второй точкой данных, на основе данных местоположения и предпринимает, по меньшей мере, одно автоматическое действие, чтобы корректировать состояние дороги. Технический результат – повышение точности выявления дорожных условий. 3 н. и 13 з.п. ф-лы, 4 ил.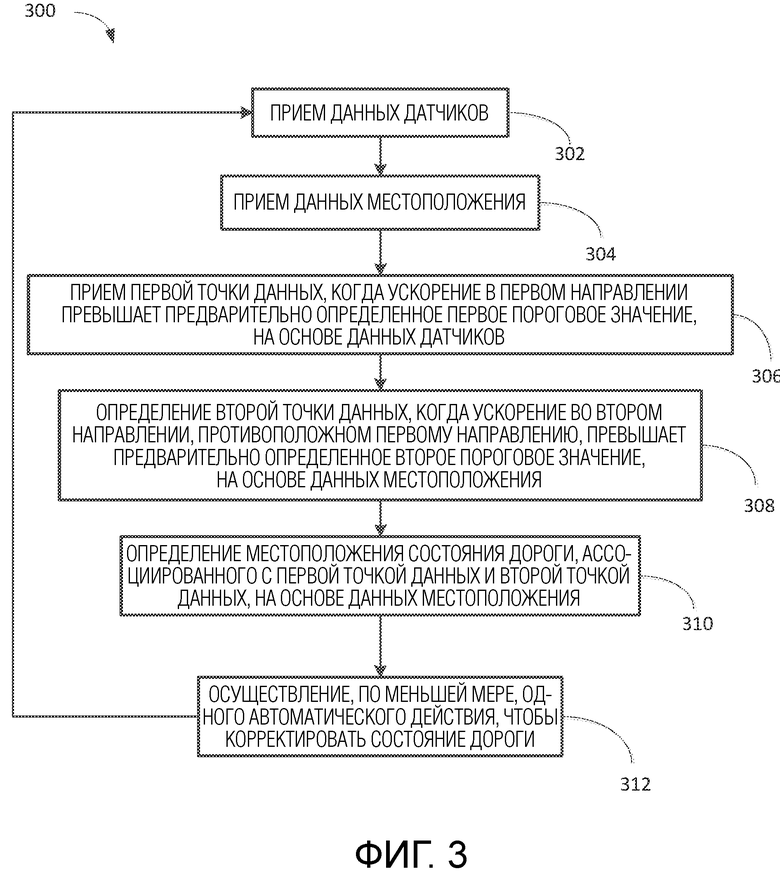
1. Система оценки дорожных условий в окружении подземной добычи, содержащая:
- акселерометр, соединенный с горной машиной;
- датчик скорости, включенный в горную машину, и
- электронный процессор, выполненный с возможностью:
- принимать данные датчиков из акселерометра,
- принимать данные скорости и данные направления, ассоциированные с горной машиной из датчика скорости;
- принимать данные местоположения, ассоциированные с горной машиной,
- определять первую точку данных, когда ускорение в первом направлении превышает предварительно определенное первое пороговое значение, на основе данных датчиков,
- определять вторую точку данных, когда ускорение во втором направлении, противоположном первому направлению, превышает предварительно определенное второе пороговое значение, на основе данных датчиков,
- определять местоположение состояния дороги, представленного посредством первой точки данных и второй точки данных, на основе данных местоположения,
- определять расстояние, проезжаемое посредством горной машины между первой точкой данных и второй точкой данных, на основе данных скорости и данных направления, ассоциированных с горной машиной,
- сравнивать расстояние с предварительно определенным расстоянием,
- автоматически формировать и передавать электронное уведомление, по меньшей мере, по одной сети связи, когда расстояние превышает заранее заданное минимальное расстояние, причем электронное уведомление информирует обслуживающий персонал о местоположении состояния дороги.
2. Система по п. 1, в которой электронный процессор выполнен с возможностью принимать данные местоположения, сформированные посредством устройства обнаружения позиции, ассоциированного с горной машиной.
3. Система по п. 1, в которой электронный процессор дополнительно выполнен с возможностью ранжировать состояние дороги на основе местоположения, расстояния, глубины или типа состояния дороги.
4. Система по п. 3, в которой электронное уведомление включает в себя ранг состояния дороги.
5. Система по п. 1, в которой акселерометр соединяется с нижней стороной горной машины.
6. Система по п. 1, в которой акселерометр включает в себя микроэлектромеханический акселерометр.
7. Система по п. 1, в которой электронный процессор выполнен с возможностью принимать данные датчиков, по меньшей мере, по одной сети связи или из съемного запоминающего устройства.
8. Способ обнаружения состояния дороги окружения подземной добычи, причем способ включает в себя этапы, на которых:
- принимают, с помощью электронного процессора, данные датчиков из акселерометра, соединенного с горной машиной, работающей в окружении подземной добычи;
- принимают, с помощью электронного процессора, данные местоположения, ассоциированные с горной машиной, сформированной посредством устройства обнаружения позиции, ассоциированного с горной машиной;
- принимают, с помощью электронного процессора, данные подвески, ассоциированные с подвеской горной машины;
- принимают, с помощью электронного процессора, данные скорости и данные направления, сгенерированные датчиком скорости, ассоциированного с горной машиной;
- определяют, с помощью электронного процессора, нормализованные данные датчиков на основе данных подвески;
- определяют, с помощью электронного процессора, первую точку данных, когда ускорение в первом направлении превышает предварительно определенное первое пороговое значение, на нормализованных основе данных датчиков;
- определяют, с помощью электронного процессора, вторую точку данных, возникающую во времени после первой точки данных, когда ускорение во втором направлении, противоположном первому направлению, превышает предварительно определенное второе пороговое значение, на основе нормализованных данных датчиков;
- определяют, с помощью электронного процессора, местоположение состояния дороги, ассоциированного с первой точкой данных и второй точкой данных, на основе данных местоположения;
- определяют расстояние, проезжаемое посредством горной машины между первой точкой данных и второй точкой данных, на основе данных скорости и данных направления, ассоциированных с горной машиной,
- сравнивают расстояние с предварительно определенным расстоянием, и
- автоматически обновляют, с помощью электронного процессора, графическую карту горной машины с индикатором, ассоциированным с местоположением состояния дороги, когда расстояние превышает заранее заданное минимальное расстояние.
9. Способ по п. 8, в котором автоматическое обновление графической карты с индикатором включает в себя этап, на котором формируют индикатор на основе ранжирования состояния дороги и добавляют индикатор на графическую карту в позиции в пределах графической карты, соответствующей местоположению.
10. Способ по п. 8, в котором автоматическое обновление графической карты с индикатором включает в себя этап, на котором модифицируют метку, цвет, форму, цвет или анимацию индикатора на основе ранжирования состояния дороги.
11. Способ по п. 8, дополнительно содержащий этап, на котором определяют ранжирование состояния дороги на основе местоположения, расстояния, глубины или типа состояния дороги.
12. Способ по п. 8, дополнительно содержащий этап, на котором идентифицируют множество местоположений посредством определения множества первых точек данных и множества вторых точек данных, определяют число для множества местоположений и формируют количественный показатель для состояния дороги на основе числа для множества местоположений.
13. Способ обнаружения дорожных условий в окружении подземной добычи, при этом способ содержит этапы, на которых:
- принимают, с помощью электронного процессора, данные датчиков из акселерометра, соединенного с горной машиной, работающей в окружении подземной добычи;
- принимают, с помощью электронного процессора, данные местоположения, ассоциированные с горной машиной, сформированной посредством устройства обнаружения позиции, ассоциированного с горной машиной;
- определяют, с помощью электронного процессора, показатель на основе данных датчиков, при этом показатель включает в себя число ускорений выше предварительно определенного порогового значения в течение периода времени;
- определяют, с помощью электронного процессора, количественный показатель на основе показателя или производной показателя;
- назначают, с помощью электронного процессора, количественный показатель, по меньшей мере, части дороги в окружении подземной добычи на основе данных местоположения; и
- выводят, с помощью электронного процессора, количественный показатель, назначаемый части дороги, причем вывод количественного показателя включает в себя этап, на котором комбинируют количественный показатель с данными выработки или данными затрат для окружения подземной добычи, чтобы разрабатывать взаимосвязь между количественным показателем и данными выработки или данными затрат.
14. Способ по п. 13, в котором вывод количественного показателя включает в себя этап, на котором добавляют количественный показатель на графическую карту окружения подземной добычи.
15. Способ по п. 13, дополнительно содержащий этап, на котором нормализуют показатель на основе данных скорости горной машины или состояния подвески горной машины.
16. Способ по п. 13, в котором вывод количественного показателя включает в себя этап, на котором идентифицируют персонал, работающий на одной или более горных машин в окружении подземной добычи, требующий переобучения.
| US 2012120072 A1, 17.05.2012 | |||
| US 2012053805 A1, 01.03.2012 | |||
| WO 2014179481 A1, 06.11.2014 | |||
| СПОСОБ ДИАГНОСТИКИ РОВНОСТИ ПОВЕРХНОСТИ ДОРОЖНОГО ПОКРЫТИЯ | 2012 |
|
RU2519002C2 |

