Область техники, к которой относится изобретение
[0001] Варианты осуществления изобретения относятся к системам и способам для выполнения наблюдения за вибрацией для промышленных машин, включающих в себя горные машины.
Уровень техники
[0002] Добычные экскаваторы, такие как электрические канатные или гидравлические экскаваторы, используются для вынимания горной породы, например, из залежи рудника. Оператор управляет экскаватором во время операции копания, чтобы загружать ковш горными породами. Оператор складывает горные породы, содержащиеся в ковше, в место выгрузки, например, в грузовой автомобиль для перевозки, в мобильную дробилку, на площадку на земле, на конвейер и т.д. После выгрузки горных пород цикл копания повторяется, когда оператор поворачивает ковш обратно к залежи, чтобы выполнять дополнительное копание. На месте разработки, особенно, когда стоимость добычи является высокой, каждый час простоя для горной машины может приводить в результате к значительной величине упущенной выручки. Такой упущенной выручки можно избежать посредством наблюдения за операциями добычного экскаватора, чтобы обнаруживать возникающие повреждения, прежде чем они перейдут в более катастрофическую неисправность.
Сущность изобретения
[0003] Данные о вибрации могут быть использованы, чтобы идентифицировать множество проблем машинного оборудования (например, дефекты роликового подшипника, проблемы зубчатой передачи, разбалансировка, люфт, резонанс, кавитация насоса, электрические проблемы, недостаток смазки, проблемы приводного ремня и т.п.). Соответственно, программы наблюдения за состоянием для горных работ часто применяют наблюдение за вибрацией на вращающемся оборудовании на борту большого мобильного оборудования, такого как электрический добычной экскаватор. Поскольку автономное наблюдение за вибрацией может приводить в результате к дорогостоящему простою, были разработаны онлайн-системы получения данных о вибрации.
[0004] Данные наблюдения за вибрацией могут быть использованы, чтобы вводить в дейсвтие тревожные оповещения на основе правил, которые указывают, когда компонент или компоненты электрического добычного экскаватора требуют технического обслуживания, ремонта или замены. Успешное использование тревожных оповещений на основе правил может зависеть от стабильного качества данных, которое может происходить от стабильных состояний машины (например, относительно установившееся состояние и нагрузка). Однако природа очень динамичной машины типа электрического добычного экскаватора (например, переменная частота вращения, переменная нагрузка и частые события ударов) делает затруднительным сбор стабильных данных, а нестабильные данные могут приводить к частым ложноположительным событиям. Также, текущие системы наблюдения за вибрацией могут зависеть от воспроизводимых состояний машины, которые не всегда являются возможными во время активных горных работ.
[0005] Соответственно, варианты осуществления, описанные в данном документе, предоставляют системы и способы для сбора данных о вибрации для горной машины.
[0006] Например, один вариант осуществления предоставляет горную машину, включающую в себя множество датчиков, каждый из множества датчиков расположен в одной из множества точек измерения, по меньшей мере, на одном компоненте горной машины. Горная машина дополнительно включает в себя первый электронный процессор, соединенный, по меньшей мере, с одним компонентом и сконфигурированный, чтобы принимать, по меньшей мере, одну команду движения и управлять, по меньшей мере, одним компонентом на основе, по меньшей мере, одной команды движения. Горная машина дополнительно включает в себя второй электронный процессор, соединенный с первым электронным процессором и множеством датчиков. Второй электронный процессор конфигурируется, чтобы определять, по меньшей мере, один предикатный параметр и определять, является ли истинным, по меньшей мере, один предикатный параметр. Второй электронный процессор дополнительно конфигурируется, чтобы, в то время как первый электронный процессор управляет, по меньшей мере, одним компонентом, и, по меньшей мере, один предикатный параметр является истинным, принимать, от множества датчиков, множество наборов данных о вибрации.
[0007] В другом варианте осуществления изобретение предоставляет способ сбора данных о вибрации для горной машины. Способ включает в себя прием, по меньшей мере, одной команды движения. Способ дополнительно включает в себя, управление, по меньшей мере, одним компонентом на основе, по меньшей мере, одной команды движения. Способ дополнительно включает в себя определение, посредством электронного процессора, по меньшей мере, одного предикатного параметра. Способ дополнительно включает в себя определение, посредством электронного процессора, является ли истинным предикатный параметр. Способ дополнительно включает в себя, в то время как, по меньшей мере, один компонент управляется на основе команды движения, и, по меньшей мере, один предикатный параметр является истинным, прием, от множества датчиков, каждый из множества датчиков расположен в одной из множества точек измерения, по меньшей мере, на одном компоненте горной машины, множества наборов данных о вибрации.
[0008] Другие аспекты изобретения должны становиться очевидными при рассмотрении подробного описания и прилагаемых чертежей.
Краткое описание чертежей
[0009] Фиг. 1 иллюстрирует электрический добычной экскаватор согласно некоторым вариантам осуществления.
[0010] Фиг. 2 является блок-схемой системы управления электрического добычного экскаватора на фиг. 1 согласно некоторым вариантам осуществления.
[0011] Фиг. 3 является блок-схемой системы сбора данных о вибрации для электрического добычного экскаватора согласно некоторым вариантам осуществления.
[0012] Фиг. 4 является блок-схемой последовательности операций способа сбора операционных данных о вибрации для электрического добычного экскаватора на фиг. 1 согласно некоторым вариантам осуществления.
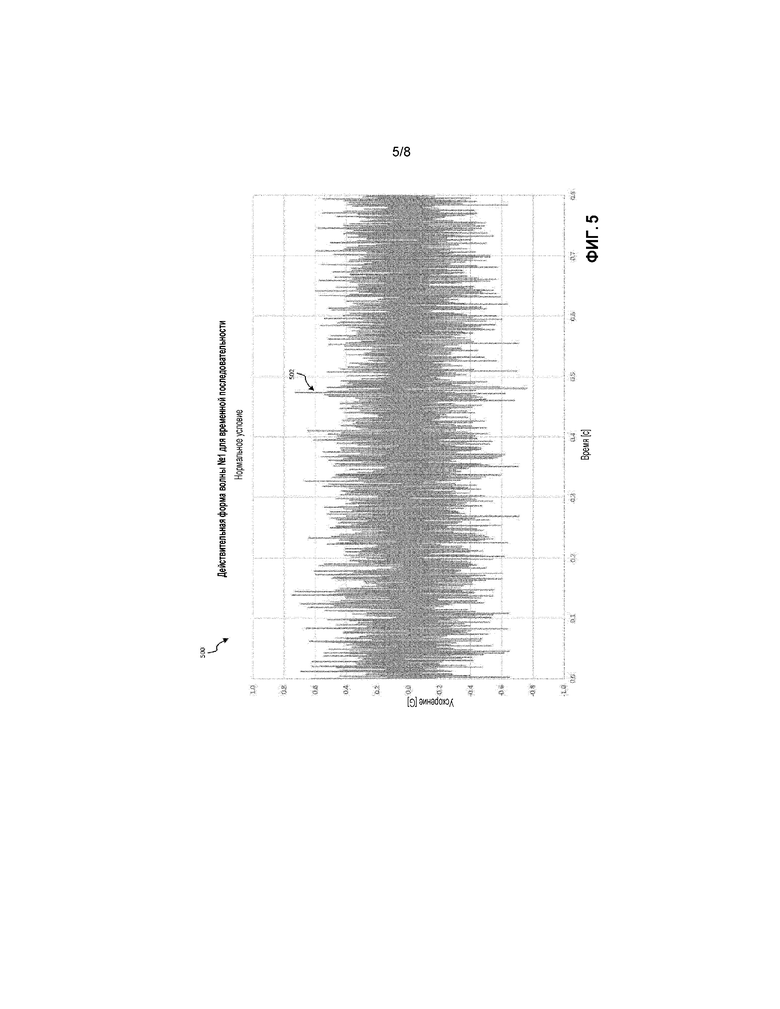
[0013] Фиг. 5 является линейным графиком, иллюстрирующим примерный действительный набор данных о вибрации согласно некоторым вариантам осуществления.
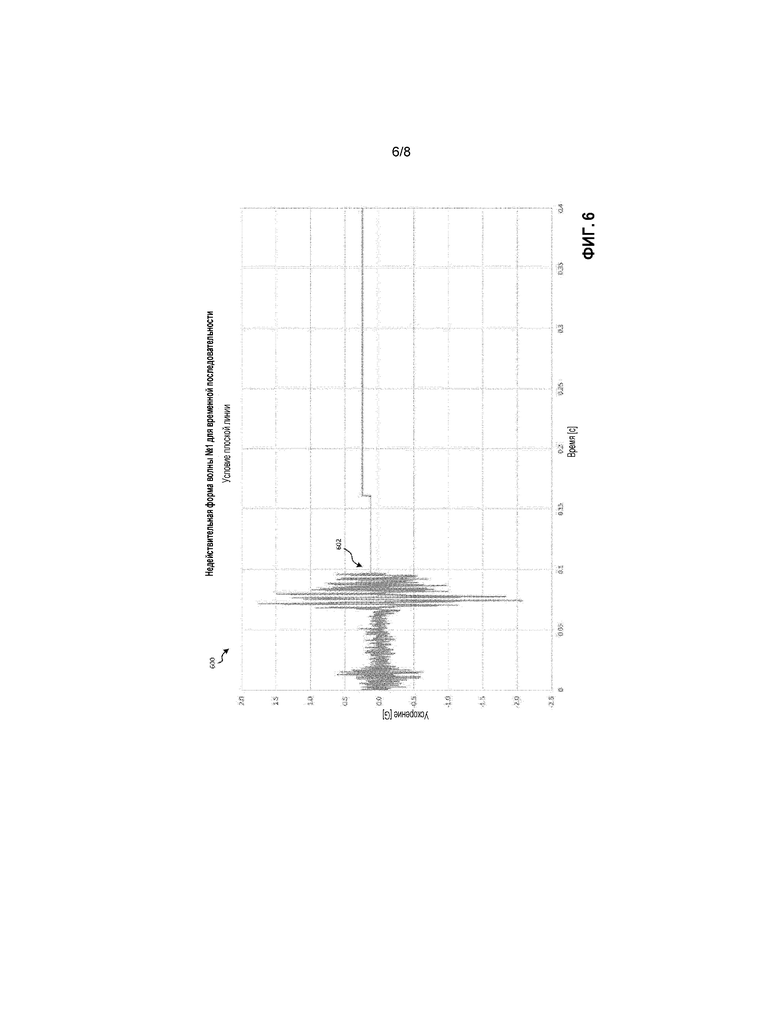
[0014] Фиг. 6 является линейным графиком, иллюстрирующим примерный недействительный набор данных о вибрации, представляющий состояние выровненной линии согласно некоторым вариантам осуществления.
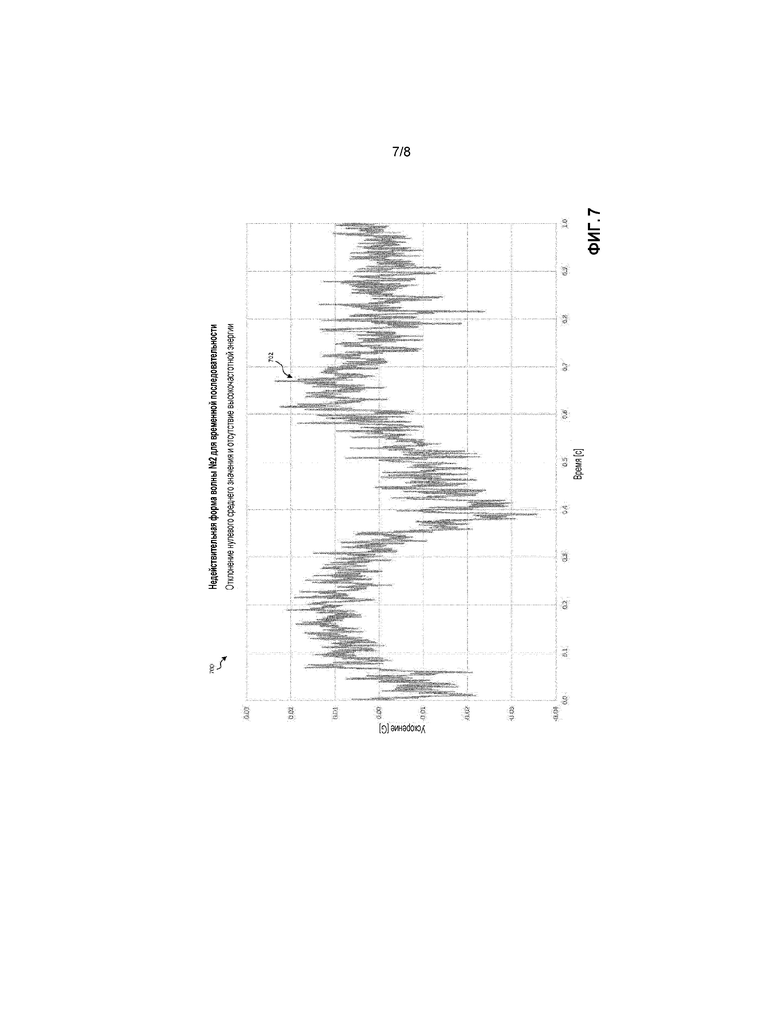
[0015] Фиг. 7 является линейным графиком, иллюстрирующим примерный недействительный набор данных о вибрации, представляющий отклонение нулевого среднего значения и отсутствие высокочастотной энергии согласно некоторым вариантам осуществления.
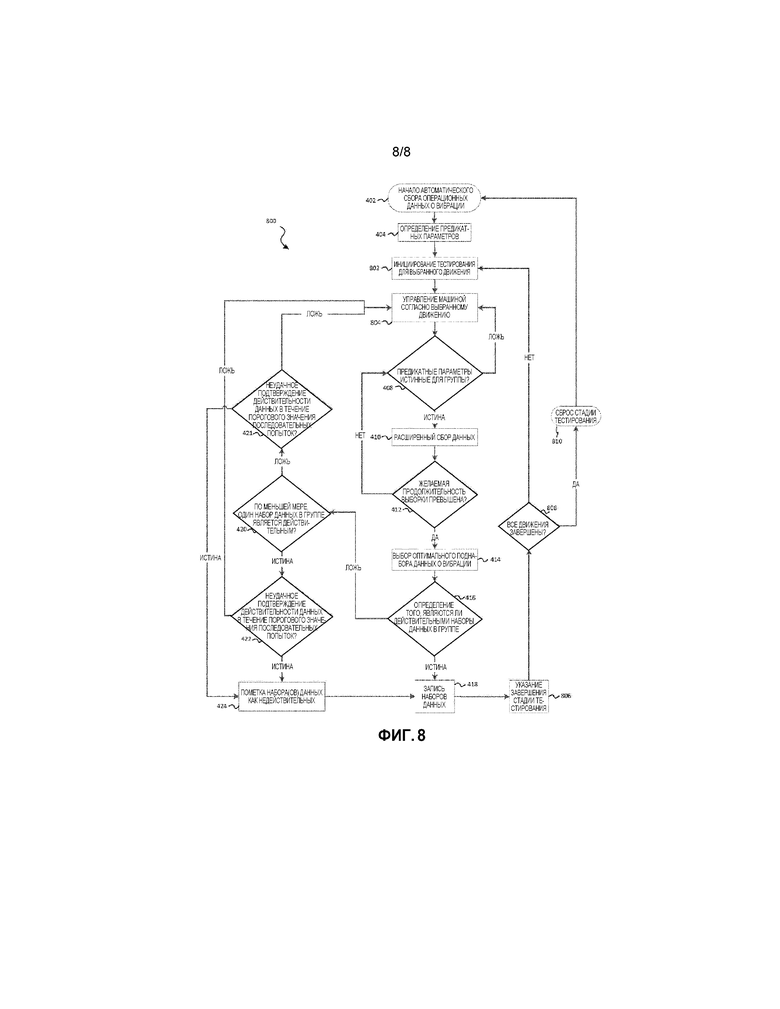
[0016] Фиг. 8 является блок-схемой последовательности способа сбора данных о вибрации во время стадии испытания электрического добычного экскаватора на фиг. 1 согласно некоторым вариантам осуществления.
Подробное описание изобретения
[0017] Перед подробным описанием различных вариантов осуществления следует понимать, что изобретение не ограничено при применении подробностями конструкции и размещения компонентов, изложенными в нижеприведенном описании или проиллюстрированными на прилагаемых чертежах. Изобретение допускает другие варианты осуществления и может быть применено на практике или выполнено различными способами. Кроме того, следует понимать, что формулировки и терминология, используемые в данном документе, служат только для описания и не должны рассматриваться как ограничивающие. Использование "включающий в себя", "содержащий" или "имеющий" и их вариантов имеет намерение содержать в себе элементы, перечисляемые далее, и их эквиваленты, а также дополнительные элементы. Термины "смонтированный", "соединенный (connected)" и "соединенный (coupled)" используются в широком смысле и охватывают прямой и косвенный монтаж, соединение (connection) или соединение (coupling). Дополнительно, "соединенный (connected)" и "соединенный (coupled)" не ограничены физическими или механическими соединениями (connection) или соединениями (coupling) и могут включать в себя электрические соединения (connection) или соединения (coupling), прямые или косвенные. Кроме того, электронная связь и уведомления могут выполняться с использованием любого известного средства, включающего в себя прямые соединения, беспроводные соединения и т.д.
[0018] Также следует отметить, что множество аппаратных и программных устройств, а также множество различных конструктивных компонентов может использоваться для того, чтобы реализовывать изобретение. Помимо этого, следует понимать, что варианты осуществления изобретения могут включать в себя аппаратные средства, программное обеспечение и электронные компоненты или модули, которые, для целей пояснения, могут быть проиллюстрированы и описаны, как если большинство компонентов реализовано исключительно в аппаратных средствах. Тем не менее, специалисты в данной области техники на основе прочтения данного подробного описания должны признавать, что, по меньшей мере, в одном варианте осуществления, электронные аспекты изобретения могут реализовываться в программном обеспечении (например, сохраняться на энергонезависимом машиночитаемом носителе), выполняемом посредством одного или более электронных процессоров. По сути, следует отметить, что множество аппаратных и программных устройств, а также множество различных конструктивных компонентов может использоваться для того, чтобы реализовывать изобретение. Кроме того, и как описано в последующих параграфах, конкретные механические конфигурации, иллюстрированные на чертежах, предназначаются, чтобы приводить в пример варианты осуществления изобретения, и что другие альтернативные механические конфигурации являются возможными. Также, "контроллеры", описанные в спецификации, могут включать в себя компоненты обработки, такие как один или более электронных процессоров (например, микропроцессоров, цифровых сигнальных процессоров (DSP), программируемых пользователем вентильных матриц (FPGA), специализированных интегральных схем (ASIC) и т.п.), долговременные компьютерно-читаемые модули памяти, интерфейсы ввода/вывода и различные соединения (например, системную шину), соединяющие компоненты.
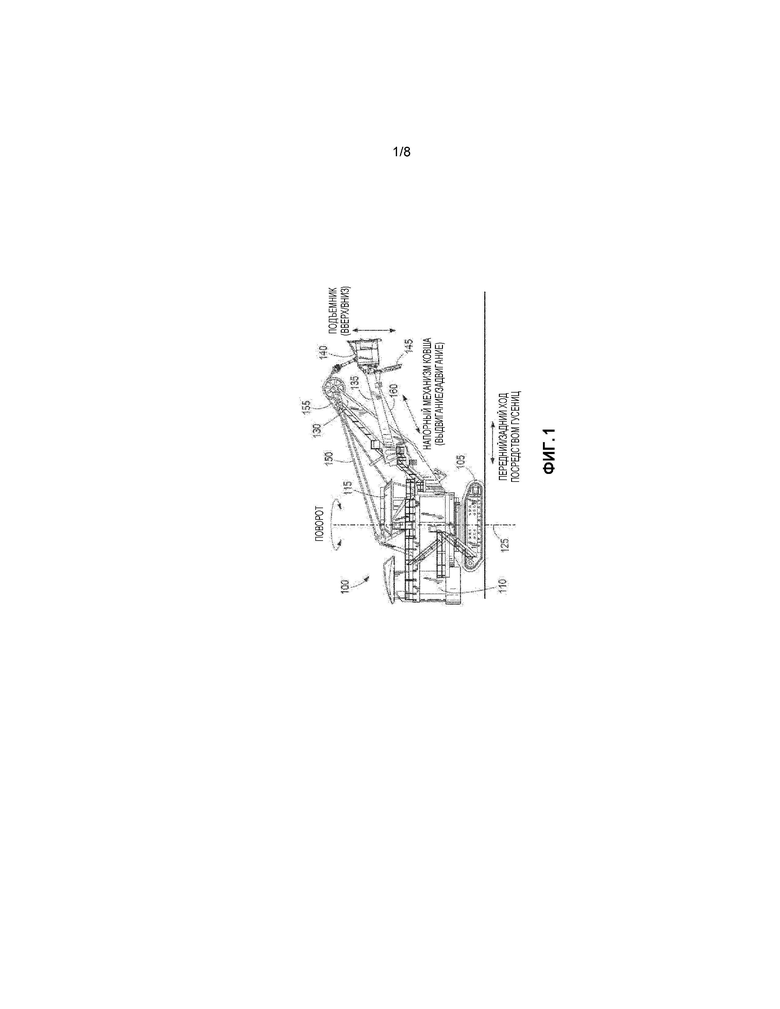
[0019] Фиг. 1 иллюстрирует электрический добычной экскаватор 100. Вариант осуществления, показанный на фиг. 1, иллюстрирует электрический добычной экскаватор 100 как канатный экскаватор. Однако в других вариантах осуществления, электрический добычной экскаватор 100 может быть другим типом горной машины, таким как, например, гибридный добычной экскаватор, канатно-скребковый экскаватор и т.п. Также, следует понимать, что варианты осуществления, описанные в данном документе, могут быть использованы с другими типами промышленных машин, отличными от горных машин. Электрический добычной экскаватор 100 включает в себя гусеницы 105 для продвижения электрического добычного экскаватора 100 вперед и назад и для поворота электрического добычного экскаватора 100 (например, посредством изменения частоты вращения, направления или обоих параметров для левой и правой гусениц относительно друг друга). Гусеницы 105 поддерживают платформу 110, включающую в себя кабину 115. Платформа 110 приспособлена, чтобы поворачиваться или вращаться вокруг поворотной оси 125, которая предоставляет возможность экскаватору 100 перемещаться от места копания к месту выгрузки. В некоторых вариантах осуществления движение гусениц 105 является необязательным для поворотного движения. Электрический добычной экскаватор 100 дополнительно включает в себя стрелу 130 ковша, поддерживающую поворотную рукоять 135 ковша (рукоять 135) и ковш 140. Ковш 140 включает в себя дверцу 145 для выгрузки содержимого изнутри ковша 140 в место выгрузки, такое как вагонетка или самосвал.
[0020] Электрический добычной экскаватор 100 также включает в себя тросы 150 подвеса на растяжках, соединенные между платформой 110 и стрелой 130 ковша для поддержки стрелы 130 ковша; трос 155 подъемника, присоединенный к лебедке (не показана) на платформе 110 для наматывания троса 155 подъемника, чтобы поднимать и опускать ковш 140; и трос 160 дверцы ковша, присоединенный к другой лебедке (не показана) для открытия дверцы 145 ковша 140. В некоторых случаях, электрический добычной экскаватор 100 является экскаватором серии P&H® серии 4100, произведенным компанией P&H Mining Equipment Inc., хотя электрический добычной экскаватор 100 может быть другим типом или моделью электрического горного оборудования.
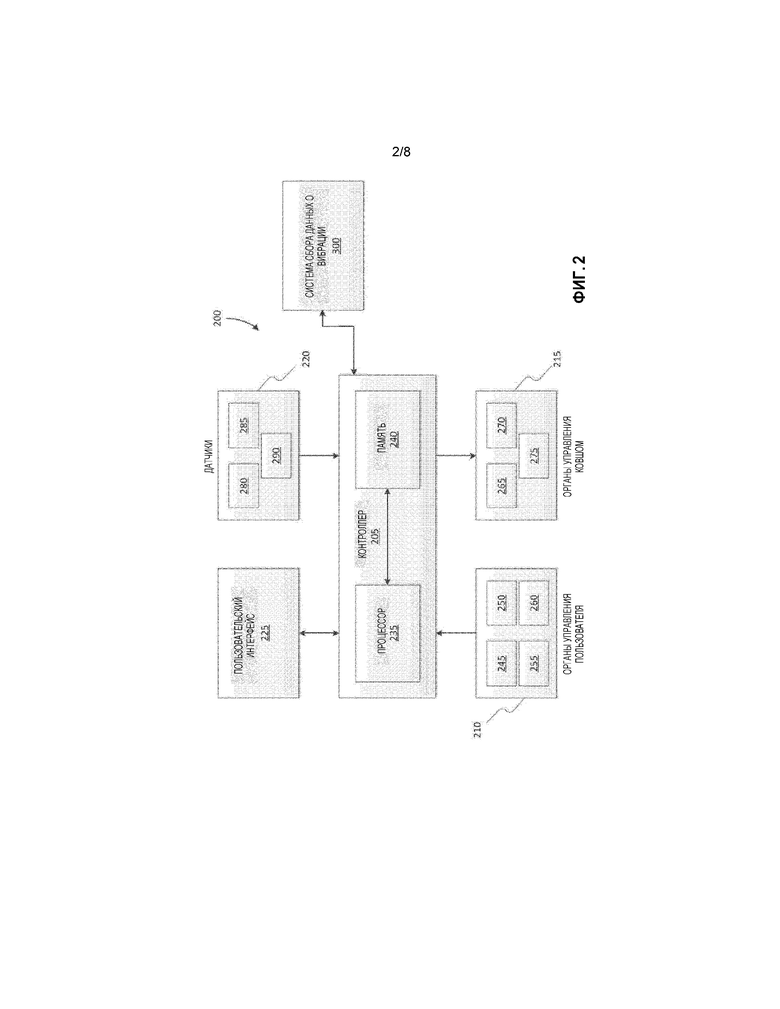
[0021] Когда гусеницы 105 электрического добычного экскаватора 100 являются неподвижными, ковш 140 функционирует так, чтобы перемещаться на основе трех управляющих действий: поднятие, напорное движение ковша и вращение. Управление поднятием поднимает и опускает ковш 140 посредством намотки и размотки троса 155 подъемником. Управление напорным движением ковша раздвигает и задвигает позицию рукояти 135 и ковша 140. В одном варианте осуществления рукоять 135 и ковш 140 выполняют напорное движение ковша с помощью системы реечной передачи. В другом варианте осуществления рукоять 135 и ковш 140 выполняют напорное движение ковша с помощью системы гидравлического привода. Управление вращением поворачивает рукоять 135 относительно оси 125 вращения. Электрический добычной экскаватор 100 включает в себя систему 200 управления (см. фиг. 2). Система 200 управления включает в себя электронный контроллер 205, один или более органов 210 управления оператора, один или более органов 215 управления ковшом, один или более датчиков 220 и один или более пользовательских интерфейсов 225. Электронный контроллер 205, органы 210 управления оператора, органы 215 управления ковшом, датчики 220 и пользовательские интерфейсы 225 соединяются напрямую, посредством одной или более управляющих или информационных шин, или их сочетания. Компоненты системы 200 управления могут связываться через проводные соединения, беспроводные соединения или их сочетание. Система 200 управления может включать в себя дополнительные компоненты, меньшее количество компонентов или другие компоненты, и вариант осуществления, иллюстрированный на фиг. 2, предоставляется просто в качестве одного примера.
[0022] Электронный контроллер 205 включает в себя электронный процессор 235 (например, микропроцессор или другой электронный контроллер) и память 240. Память 240 может включать в себя постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), другие долговременные компьютерно-читаемые носители или их сочетание. Электронный процессор 235 конфигурируется, чтобы извлекать инструкции и данные из памяти 240 и исполнять, среди прочего, инструкции, чтобы выполнять способы, описанные в данном документе, включающие в себя способы 400 и 500 или их фрагменты.
[0023] Электронный контроллер 205 принимает входные данные от органов 210 управления оператора. В некоторых вариантах осуществления органы 210 управления оператора включают в себя управление 245 ходом ковша, управление 250 поворотом, управление 255 подъемником и управление 260 дверцей. Управление 245 ходом ковша, управление 250 поворотом, управление 255 подъемником и управление 260 дверцей включают в себя, например, управляемые оператором устройства ввода, такие как джойстики, рычаги, ножные педали и другие актуаторы. Органы 210 управления оператора принимают операторский ввод через управляемые оператором устройства ввода и выводят цифровые команды движения электронному контроллеру 205. Команды движения могут включать в себя, например, поднятие подъемника, опускание подъемника, раздвигание напорного механизма ковша, сдвигание напорного механизма ковша, поворот по часовой стрелке, поворот против часовой стрелки, открывание дверцы ковша, передний ход левой гусеницы, задний ход левой гусеницы, передний ход правой гусеницы и задний ход левой гусеницы.
[0024] По приеме команды движения электронный контроллер 205, в целом, управляет одним или более органами 215 управления ковшом на основе команды движения. Органы 215 управления ковшом могут включать в себя один или более моторов 265 напорного механизма ковша, один или более моторов 270 для поворота и один или более моторов 275 подъемника. Например, когда оператор указывает через орган 250 управления поворотом поворот рукояти 135 против часовой стрелки, электронный контроллер 205 управляет мотором 270 для поворота, чтобы поворачивать рукоять 135 против часовой стрелки. В некоторых вариантах осуществления электронный контроллер 205 также ограничивает команды движения оператора или формирует команды движения независимо от операторского ввода.
[0025] Электронный контроллер 205 также связывается с датчиками 220, чтобы наблюдать за местоположением и состоянием ковша 140. Например, электронный контроллер 205 может связываться с одним или более датчиками 280 напорного механизма ковша, одним или более датчиками 285 поворота и одним или более датчиками 290 подъемника. Датчики 280 напорного механизма ковша обнаруживают уровень выдвижения или отведения ковша 140. Датчики 285 поворота обнаруживают угол поворота рукояти 135. Датчики 290 подъемника обнаруживают высоту ковша 140 (например, на основе позиции троса 155 подъемника). В некоторых вариантах осуществления датчик 220 также включает в себя один или более датчиков защелки дверцы, которые обнаруживают, является ли дверца 145 ковша открытой или закрытой, и измеряют вес груза, содержащегося в ковше 140.
[0026] Пользовательский интерфейс 225 предоставляет информацию оператору о состоянии электрического добычного экскаватора 100 и других систем, связывающихся с электрическим добычным экскаватором 100. Пользовательский интерфейс 225 может включать в себя одно или более из следующего: экран дисплея (например, жидкокристаллический дисплей (LCD)); один или более светоизлучающих диодов (LED) или другие устройства освещения; индикатор на лобовом стекле (например, проецируемый на окно кабины 115); динамики для звуковой обратной связи (например, тонов, произносимых сообщений и т.п.); устройства осязательной или тактильной обратной связи, такие как вибрирующие устройства, которые вызывают вибрацию сиденья оператора или органов 210 управления оператора; или другое устройство обратной связи. В некоторых вариантах осуществления пользовательский интерфейс 225 также включает в себя одно или более устройств ввода. Например, в некоторых вариантах осуществления, пользовательский интерфейс 22 включает в себя сенсорный экран, который работает в качестве устройства вывода и устройства ввода. Варианты осуществления пользовательского интерфейса 225 могут предоставлять графические пользовательские интерфейсы (GUI) для предоставления выходных данных оператору, приема входных данных от оператора или их сочетания.
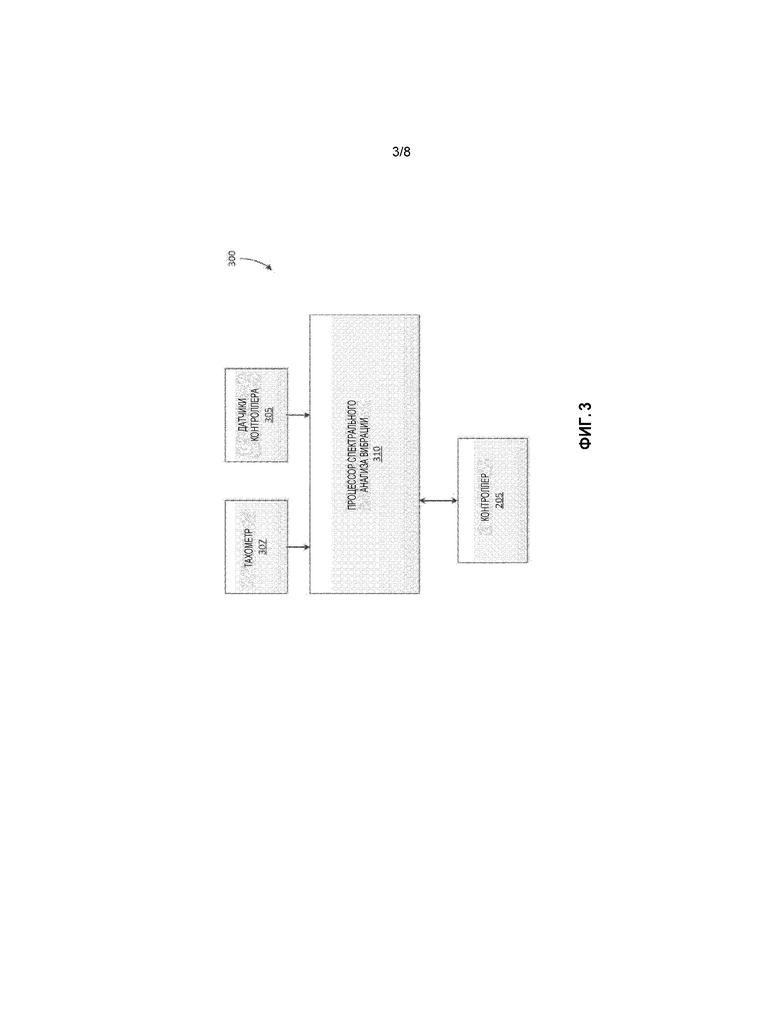
[0027] Фиг. 3 является блок-схемой системы 300 сбора данных о вибрации для электрического добычного экскаватора 100. Система 300 сбора данных о вибрации включает в себя один или более датчиков 305 акселерометра, один или более тахометров 307 и процессор 310 спектрального анализа вибрации, которые соединяются напрямую, посредством одной или более управляющих или информационных шин или их сочетания по проводным или беспроводным соединениям. Система 300 сбора данных о вибрации дополнительно соединяется с возможностью обмена данными с электронным контроллером 205. Система 300 сбора данных о вибрации может включать в себя дополнительные компоненты, меньшее количество компонентов или другие компоненты, и вариант осуществления, иллюстрированный на фиг. 3, предоставляется просто в качестве одного примера. Также, в некоторых вариантах осуществления, функциональность, выполняемая посредством системы 200 управления и системы 300 сбора данных о вибрации, как описано в данном документе, может быть объединена и распределена различными способами. Например, в некоторых вариантах осуществления, система 200 управления (т.е., электронный контроллер 205) может быть сконфигурирована, чтобы выполнять функциональность системы 300 сбора данных о вибрации или наоборот. Система 300 сбора данных о вибрации или ее фрагменты могут быть включены в электрический добычной экскаватор 100 или могут быть удаленными от электрического добычного экскаватора 100. Например, в некоторых вариантах осуществления, один или более компонентов системы 300 сбора данных о вибрации могут связываться с одним или более компонентами системы 200 управления через беспроводное соединение, которое предоставляет возможность компонентам системы 300 сбора данных о вибрации быть удаленными от компонентов системы 200 управления.
[0028] Датчики 305 акселерометра собирают данные о вибрации электрического добычного экскаватора 100, пока электрический добычной экскаватор 100 работает. Датчики 305 акселерометра измеряют вибрации структуры и сообщают измеренные вибрации процессору 310 спектрального анализа вибрации. Например, в некоторых вариантах осуществления, датчики 305 акселерометра включают в себя пьезоэлектрический материал, который производит электрический заряд, пропорциональный оказываемому усилию, вызванному вибрациями. Датчики 305 акселерометра могут быть радиальными датчиками акселерометра или осевыми датчиками акселерометра. Радиальные датчики акселерометра измеряют, например, ускорение на подшипниках электрического добычного экскаватора 100. Осевые датчики акселерометра измеряют, например, ускорение на валах электрического добычного экскаватора 100. В альтернативных вариантах осуществления другие типы датчиков (например, датчики скорости, датчики приближения и лазерные датчики смещения) могут быть использованы для обнаружения вибраций.
[0029] В некоторых вариантах осуществления датчик 305 ускорения позиционируется в одной из множества точек измерения на экскаваторе 100. Датчики 305 акселерометра могут также быть размещены в группах точек измерения. Каждая группа точек измерения позиционируется, чтобы обнаруживать вибрации для конкретного компонента или группы связанных компонентов экскаватора 100, таких как, например, один или более моторов 275 подъемника и зубчатых валов; промежуточных валов подъемника; барабана подъемника; одного или более поворотных моторов 270 и зубчатых валов; поворотных промежуточных валов; поворотных выходных валов; один или более моторов 265 напорного механизма ковша; входной вал напорного механизма ковша; промежуточный вал напорного механизма ковша, коробка передач подъемника, коробка передач напорного механизма ковша и коробка передач для поворота.
[0030] Один или более тахометров 307 обнаруживают частоту вращения и направление различных моторов электрического добычного экскаватора 100 и сообщают результаты измерений процессору 310 спектрального анализа вибрации. В некоторых вариантах осуществления один или более тахометров 307 реализуются в программном обеспечении.
[0031] Процессор 310 спектрального анализа вибрации включает в себя электронный процессор (например, микропроцессор или другой электронный контроллер), который выполняет инструкции для анализа и обработки данных о вибрации, принятых от датчиков 305 акселерометра. В некоторых вариантах осуществления процессор 310 спектрального анализа вибрации собирает и обрабатывает данные о вибрации от датчиков 305 акселерометра параллельно. Например, процессор 310 спектрального анализа вибрации может координировать время начала измерения и продолжительность выборки для датчиков 305 акселерометра, чтобы собирать наборы данных о вибрации приблизительно одинаковой продолжительности в приблизительно одно и то же время. В некоторых вариантах осуществления данные о вибрации, обработанные посредством процессора 310 спектрального анализа вибрации, включают в себя набор данных, который включает в себя форму волны временной последовательности, отслеживающую ускорение (например, в единицах ускорения силы тяжести), обнаруженное посредством датчика 305 ускорения по времени. В некоторых вариантах осуществления набор данных о вибрации должен быть желаемой продолжительности, чтобы использоваться для некоторого анализа вибрации. Соответственно, процессор 310 спектрального анализа вибрации может формировать набор данных о вибрации желаемой продолжительности посредством сшивания вместе множества более коротких сегментов временных рядов.
[0032] Процессор 310 спектрального анализа вибрации может сообщать данные о вибрации (например, исходные данные или обработанные наборы данных о вибрации) электронному контроллеру 205 (например, для отображения оператору через пользовательский интерфейс 225) или внешней системе (например, через локальную вычислительную сеть, глобальную вычислительную сеть, беспроводную сеть, Интернет или сочетание вышеупомянутого (не показано)).
[0033] В некоторых вариантах осуществления система 300 сбора данных о вибрации получает данные о вибрации во время работы электрического добычного экскаватора 100 в нормальной производственной среде (т.е., пока горные работы выполняются на горной выработке). Дополнительно, или альтернативно, система 300 сбора данных о вибрации получает данные о вибрации во время "стадии тестирования" электрического добычного экскаватора 100. Во время стадии тестирования электрический добычной экскаватор 100 движется по одной или более предварительно определенным схемам (например, поднимает ковш 140 вверх и вниз; выполняет напорное движение ковша 140 внутрь и наружу; и поворачивает рукоять 135 влево и вправо). Посредством движения электрического добычного экскаватора 100 по предварительно определенным схемам данные о вибрации могут быть захвачены в известные моменты, когда электрический добычной экскаватор 100 работает с постоянной скоростью. Также, предварительно определенные схемы могут повторяться, пока достаточные данные о вибрации не будут собраны. Один пример стадии тестирования описывается в патентной заявке США № 13/743,894.
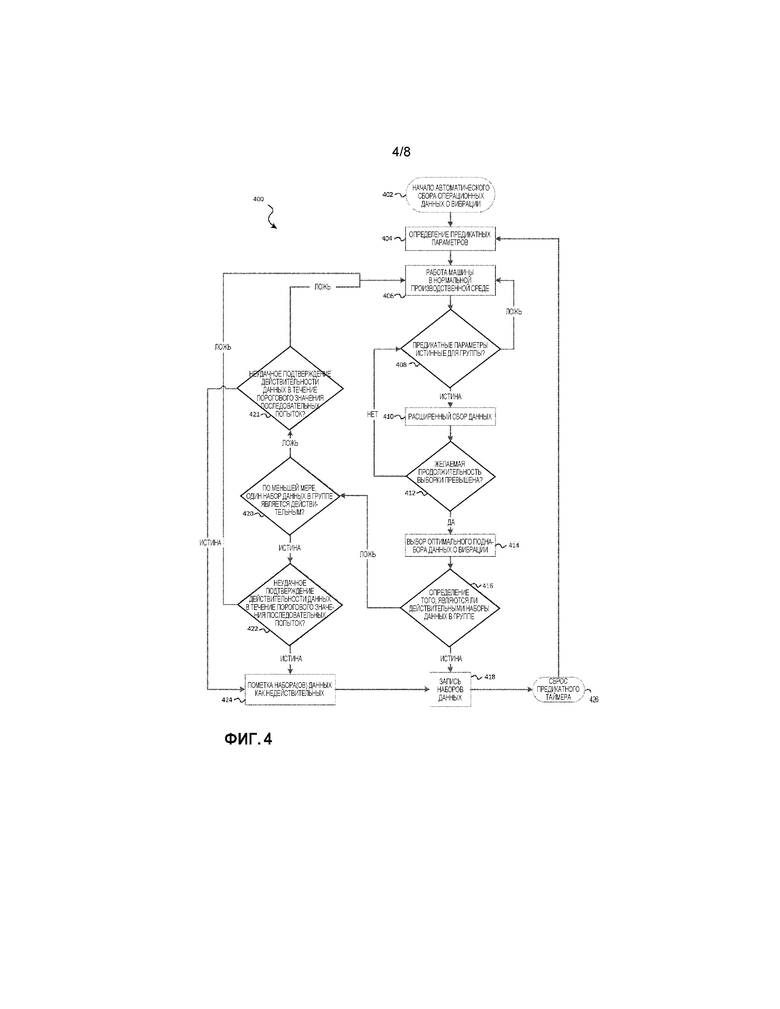
[0034] Фиг. 4 иллюстрирует способ 400 для сбора данных о вибрации для электрического добычного экскаватора 100 согласно одному варианту осуществления. В качестве примера, способ 400 описывается с точки зрения первого электронного процессора (например, электронного процессора 235), который управляет работой, по меньшей мере, одного компонента, например, мотора для напорного движения ковша) горной машины (например, электрического добычного экскаватора 100), и второго электронного процессора (например, в процессоре 310 спектрального анализа вибрации), который собирает и обрабатывает данные о вибрации от датчиков вибрации (например, датчиков 305 акселерометра), расположенных в группе для обнаружения вибраций, по меньшей мере, одного компонента. Этот пример не должен считаться ограничивающим. Например, альтернативные варианты осуществления способа 400 могут быть реализованы с помощью дополнительных электронных процессоров или с помощью единственного электронного процессора, который выполняет все функции, описанные в данном документе.
[0035] На этапе 402 второй электронный процессор начинает автоматический процесс сбора операционных данных о вибрации. В некоторых вариантах осуществления процесс сбора данных начинается, когда электрический добычной экскаватор 100 включается. В других вариантах осуществления процесс сбора данных не начинается до тех пор, пока предварительно определенное время не пройдет с тех пор, как электрический добычной экскаватор 100 был включен, или до тех пор, пока первый электронный процессор не проинструктирует второму электронному процессору начинать процесс сбора данных.
[0036] На этапе 404 второй электронный процессор определяет, по меньшей мере, один предикатный параметр. В некоторых вариантах осуществления второй электронный процессор определяет предикатные параметры посредством считывания одного или более предикатных параметров из одного или более конфигурационных файлов, сохраненных в памяти. Как объяснено подробно ниже, предикатный параметр является условием, которое должно быть истинным для того, чтобы второй электронный процессор собирал данные о вибрации от датчиков вибрации. В частности, чтобы собирать данные о вибрации соответствующего качества, второй электронный процессор предпочтительно собирает данные во время соответствующих состояний горной машины (например, когда горная машина работает в относительно устойчивом состоянии и с относительно устойчивой нагрузкой). Соответственно, предикатные параметры могут указывать условия, которые, когда являются истинными, указывают, что горная машина работает в устойчивом состоянии и нагрузке. Такие предикатные параметры, изложенные подробно ниже, и значения, для которых такие предикатные параметры являются истинными, могут быть определены экспериментальным образом.
[0037] На этапе 406 горная машина работает в нормальной производственной среде (т.е. во время активных горных работ). Например, оператор может управлять горной машиной, чтобы копать горную породу из залежи и складывать горную породу в самосвал. Когда оператор управляет горной машиной, первый электронный процессор принимает, по меньшей мере, одну команду движения и управляет, по меньшей мере, одним компонентом горной машины на основе команд движения. Например, оператор может управлять горной машиной, чтобы выполнять выдвижение напорного механизма ковша, и первый электронный процессор принимает, по меньшей мере, одну команду движения, чтобы управлять мотором напорного механизма ковша, чтобы выдвигать рукоять 135 и ковш 140. В других примерах первый электронный процессор может управлять компонентами горной машины, чтобы поднимать подъемник, опускать подъемник, задвигать напорный механизм ковша, поворачивать по часовой стрелке, поворачивать против часовой стрелки и т.п.
[0038] На этапе 408 второй электронный процессор определяет, являются ли предикатные параметры (определенные выше на этапе 404) истинными. Как отмечено выше, предикатные параметры являются условиями, которые, если являются истинными, более вероятно должны приводить в результате к стабильному качеству собранных данных о вибрации. В некоторых вариантах осуществления используемый предикатный параметр или сочетание предикатных параметров может зависеть от группы датчиков, которые предоставляют наборы данных о вибрации второму электронному процессору.
[0039] Один примерный предикатный параметр является продолжительностью времени с тех пор, как второй электронный процессор в прошлый раз завершил сбор данных о вибрации. Например, второй электронный процессор может быть сконфигурирован, чтобы собирать данные о вибрации каждые три часа во время работы горной машины. В этой ситуации, предикатный параметр является истинным, когда более чем три часа прошло с тех пор, как второй электронный процессор в прошлый раз собрал данные о вибрации, и остается истинным до тех пор, пока второй процессор не завершит обработку собранных в настоящее время данных о вибрации.
[0040] Другой примерный предикатный параметр может быть рабочим состоянием, по меньшей мере, одного компонента или мотора, который приводит в действие, по меньшей мере, один компонент. Например, предикатный параметр может включать в себя направление вращения мотора, допустимый диапазон частоты вращения мотора, допустимую мгновенную скорость изменения частоты вращения мотора и допустимую скользящую среднюю скорости изменения частоты вращения мотора. В этой ситуации предикатный параметр является истинным, когда измеренное значение (например, частота вращения, направление или скорость изменения) совпадает или находится в предварительно определенном диапазоне предварительно определенного значения для рассматриваемого параметра. Например, в одном примере, второй электронный процессор принимает сигнал, по меньшей мере, от одного тахометра (одного или более тахометров 307), наблюдающих за мотором напорного механизма ковша. Второй электронный процессор определяет, на основе принятого сигнала, частоту вращения и направление вращения мотора напорного механизма ковша. Аналогично, в зависимости от одного или более предикатных параметров, определенных на этапе 404, второй электронный процессор может определять мгновенную скорость изменения частоты вращения мотора напорного механизма ковша и скользящую среднюю скорость изменения частоты вращения мотора напорного механизма ковша.
[0041] Предикатный параметр может не быть основан на частоте вращения мотора и направлении. Например, частота вращения поворотного мотора и направление могут не предоставлять достаточно информации для того, чтобы второй электронный процессор точно определял, переносит ли ковш 140 полезный груз. В таком случае, предикатный параметр может включать в себя состояние цифровой машины (например, которое получено посредством алгоритма конечного автомата для расчленения цикла и предоставлено первым электронным процессором второму электронному процессору). В этой ситуации, предикатный параметр является истинным, пока первый электронный процессор указывает, что горная машина находится в желаемом состоянии (например, конкретном фрагменте цикла копания).
[0042] Другие примерные предикатные параметры могут быть основаны на крутящем моменте, по меньшей мере, для одного компонента или мотора, который приводит в действие, по меньшей мере, один компонент. Например, предикатный параметр может включать в себя допустимый диапазон крутящего момента мотора, допустимую мгновенную скорость изменения в крутящем моменте мотора и допустимую скользящую среднюю скорость изменения в крутящем моменте мотора. В этих ситуациях предикатный параметр является истинным, когда измеренное значение (например, крутящий момент или скорость изменения) совпадает или находится в предварительно определенном диапазоне предварительно определенного значения для рассматриваемого параметра. Например, второй электронный процессор может принимать значения крутящего момента для мотора напорного механизма ковша от первого электронного процессора. В зависимости от одного или более предикатных параметров, определенных на этапе 404, второй электронный процессор может также определять мгновенную скорость изменения крутящего момента мотора напорного механизма ковша и скользящую среднюю скорость изменения крутящего момента мотора напорного механизма ковша.
[0043] Когда второй электронный процессор определяет, что один или более предикатных параметров (определенных на этапе 404) являются ложными, второй электронный процессор продолжает наблюдать предикатные параметры, пока горная машина продолжает работать (на этапе 406).
[0044] Когда второй электронный процессор определяет, что предикатные параметры (определенные на этапе 404) являются истинными, второй электронный процессор выполняет расширенный сбор данных (на этапе 410). Во время расширенного сбора данных, второй электронный процессор принимает множество наборов данных о вибрации, по одному от каждого из множества датчиков. Второй электронный процессор может принимать множество наборов данных о вибрации параллельно.
[0045] На этапе 412 второй электронный процессор определяет, превышает ли каждый из наборов данных о вибрации желаемую продолжительность. Когда наборы данных о вибрации не превышают желаемую продолжительность, второй электронный процессор продолжает собирать данные о вибрации от датчиков, пока предикатные параметры являются истинными (на этапах 408-410). В некоторых ситуациях, предикатные параметры могут не оставаться истинными достаточно долго, чтобы собирать наборы данных о вибрации, которые превышают желаемую продолжительность. Например, мотор напорного механизма ковша может работать в и вне желаемого диапазона частоты вращения. В таких ситуациях, второй электронный процессор может собирать более короткие сегменты данных и формировать набор данных о вибрации желаемой продолжительности, сшивая вместе достаточное число более коротких сегментов данных.
[0046] На этапе 414, когда наборы данных о вибрации превышают желаемую продолжительность выборки, второй электронный процессор выбирает один поднабор данных о вибрации из каждого из множества собранных наборов данных о вибрации. В некоторых вариантах осуществления, второй электронный процессор выбирает поднабор данных о вибрации, чтобы соответствовать желаемой окончательной продолжительности формы волны. Например, форма волны продолжительностью в одну секунду (т.е. поднабор данных о вибрации) может быть выбрана из первоначальной расширенной формы волны продолжительностью приблизительно пять-десять секунд (т.е. набора данных о вибрации). Второй электронный процессор может выбирать поднаборы данных о вибрации на основе окна или окон времени с минимальным колебанием параметров, таким как, например, наименьшее пиковое ускорение мотора, наименьшее суммарное колебание частоты вращения мотора, наименьшая скорость изменения крутящего момента мотора и наименьшее суммарное колебание крутящего момента мотора.
[0047] На этапе 416 второй электронный процессор определяет, являются ли действительными наборы данных о вибрации. Второй электронный процессор может определять действительность данных посредством тестирования наборов данных о вибрации или выбранных поднаборов данных о вибрации. Набор или поднабор данных о вибрации может быть действительным, когда набор данных о вибрации предоставляет полезную информацию, касающуюся вибрации наблюдаемого компонента. Например, фиг. 5 иллюстрирует график 500, который показывает действительный набор 502 данных о вибрации. Действительный набор 502 данных о вибрации показывает стабильное среднее значение при нулевых ускорениях силы тяжести и иллюстрирует высокочастотную энергию.
[0048] Напротив, набор или поднабор данных о вибрации является недействительным, если он является непригодным (т.е. не будет предоставлять полезную информацию, касающуюся вибрации наблюдаемого компонента). Например, фиг. 6 иллюстрирует график 600, который показывает недействительный набор 602 данных. Недействительный набор 602 данных показывает широкое отклонение в вибрации (ускорениях силы тяжести), за которым следует выровненная линия. В другом примере фиг. 7 иллюстрирует график 700, который показывает второй недействительный набор 702 данных. Второй недействительный набор 702 данных показывает большую степень отклонения нулевого среднего значения и отсутствие высокочастотной энергии.
[0049] Возвращаясь к фиг. 4, на этапе 418, когда все наборы данных о вибрации (или поднаборы) являются действительными, второй электронный процессор записывает наборы данных (например, записывая наборы данных о вибрации в память). В некоторых вариантах осуществления второй электронный процессор записывает наборы данных о вибрации в памяти процессора 310 спектрального анализа вибрации. В других вариантах осуществления второй электронный процессор записывает наборы данных о вибрации в базе данных, внешней по отношению к горной машине.
[0050] На этапе 420 второй электронный процессор определяет, является ли действительным, по меньшей мере, один из наборов данных о вибрации. Стабильно недействительные наборы данных о вибрации, принимаемые от датчиков в группе, могут указывать, например, что один или более предикатных параметров, определенных на этапе 404, являются некорректными, что одно или более пороговых значений тестирования действительности заданы некорректно, или что датчики для этой группы нуждаются в ремонте или замене. Соответственно, на этапе 421, когда ни один из наборов данных о вибрации не является действительным, второй электронный процессор определяет, действительно ли все наборы данных о вибрации потерпели неудачу в подтверждении действительности данных (на этапе 416) в течение порогового числа последовательных попыток. Когда пороговое значение не превышено, второй электронный процессор начинает сбор данных о вибрации снова на этапе 406. Когда пороговое значение превышено, второй электронный процессор помечает затронутые наборы данных как недействительные на этапе 424 (например, записывая флаг недействительности в метаданные, ассоциированные с группой датчиков).
[0051] Стабильно недействительные наборы данных о вибрации, принимаемые от одного или более (но не всех) датчиков, могут указывать, что один или более датчиков нуждаются в ремонте или замене. Например, реакция в виде выровненной линии в недействительном наборе 602 данных может указывать событие гидравлического удара, который может временно насыщать датчик. В другом примере недостаток высокочастотной реакции во втором недействительном наборе 702 данных может указывать чрезмерный удар или неплотно прикрепленный датчик, который ослабляет передачу высокочастотной энергии. Такие датчики не будут предоставлять действительные данные до тех пор, пока проблемы с ними не будут определены и решены. Соответственно, на этапе 422, когда, по меньшей мере, один набор данных о вибрации является недействительным, второй электронный процессор определяет, не удалось ли недействительным наборам данных о вибрации от конкретных датчиков подтверждение действительности данных (на этапе 416) в течение порогового числа последовательных попыток. Когда пороговое значение не превышено, второй электронный процессор начинает сбор данных о вибрации снова на этапе 406. Когда пороговое значение превышается, второй электронный процессор помечает затронутые наборы данных как недействительные на этапе 424. Например, в некоторых вариантах осуществления второй электронный процессор записывает флаг недействительности в метаданных, ассоциированных с каждым затронутым датчиком, и записывает метаданные в память с наборами данных о вибрации (на этапе 418). В других вариантах осуществления второй электронный процессор устанавливает флаг недействительности для каждого затронутого датчика в памяти и отбрасывает недействительные наборы данных.
[0052] Независимо от того, когда или почему флаги недействительности записаны, первый или второй электронные процессоры могут считывать флаги недействительности и оповещать оператора горной машины (например, лишь инициируя тревожное оповещение на пользовательском интерфейсе 225). Также, в некоторых вариантах осуществления, флаги могут инициировать тревожное оповещение в системе, внешней по отношению к горной машине.
[0053] На этапе 426 второй электронный процессор может сбрасывать предикатный таймер, чтобы указывать, что группа наборов данных о вибрации была успешно собрана. Как описано выше, второй электронный процессор может использовать предикатный таймер на этапе 404, чтобы определять, когда начинать процесс сбора данных о вибрации снова (т.е., сколько времени прошло после последнего сбора данных о вибрации).
[0054] Как отмечено выше, данные о вибрации могут быть собраны во время обычной работы горной машины или во время стадии тестирования. Соответственно, фиг. 8 иллюстрирует способ 800 для сбора данных о вибрации во время стадии тестирования горной машины согласно одному варианту осуществления. В некоторых вариантах осуществления способ 800 является адаптацией способа 400. Соответственно, этапы на фиг. 8 выполняются как аналогично обозначенные этапы, описанные выше относительно способа 400. Как отмечено выше, во время стадии тестирования оператор перемещает горную машину по одной или более предварительно определенным схемам (т.е. движениям). Соответственно, на этапе 802, оператор инициирует тестирование для выбранного движения стадии тестирования (например, напорное движение ковша 140 внутрь и наружу). Например, оператор горной машины может выбирать движение с помощью пользовательского интерфейса 225. В некоторых вариантах осуществления оператор выбирает движение для выполнения. Альтернативно или в дополнение, второй электронный процессор может выбирать движение и отображать выбранное движение оператору через пользовательский интерфейс 225.
[0055] На этапе 804 оператор управляет горной машиной согласно выбранному движению стадии тестирования, и первый электронный процессор принимает, по меньшей мере, одну команду движения, чтобы управлять горной машиной, чтобы выполнять движение стадии тестирования. На этапах 408-426 второй электронный процессор выбирает и подтверждает действительность наборов данных о вибрации, как описано выше относительно способа 400. Оператор продолжает управлять горной машиной согласно выбранному движению стадии тестирования на этапе 802, повторяя выбранное движение стадии тестирования при необходимости, до тех пор, пока наборы данных о вибрации не превысят желаемую продолжительность выборки (на этапе 412). На этапе 806 второй электронный процессор указывает, что стадия тестирования и сбор данных о вибрации для этой стадии тестирования завершены. В некоторых вариантах осуществления второй электронный процессор может сообщать указание завершения первому электронному процессору, который может отображать указание оператору на пользовательском интерфейсе 225.
[0056] На этапе 808 второй электронный процессор определяет, были ли завершены выбранные движения. Когда выбранные движения были завершены, второй электронный процессор выполняет сброс стадии тестирования. В некоторых вариантах осуществления, сброс стадии тестирования включает в себя сброс таймера (например, чтобы отслеживать, аналогично предикатному таймеру, описанному выше, сколько времени прошло с прошлой стадии тестирования для сбора данных о вибрации). Когда выбранные движения не были завершены, второй электронный процессор собирает данные о вибрации для следующего выбранного движения стадии тестирования на этапе 802.
[0057] Таким образом, изобретение предоставляет, среди прочего, систему и способ для сбора операционных данных о вибрации для горной машины. Различные признаки и преимущества изобретения излагаются в прилагаемой формуле изобретения.
Изобретение относится к горной машине. Горная машина содержит множество датчиков, первый электронный процессор и второй электронный процессор. Каждый из множества датчиков располагается в одной из множества точек измерения, по меньшей мере, одного компонента горной машины. Первый процессор соединен, по меньшей мере, с одним компонентом и сконфигурирован принимать, по меньшей мере, одну команду движения и управлять, по меньшей мере, одним компонентом на основе, по меньшей мере, одной команды движения. Второй процессор соединен с первым электронным процессором и множеством датчиков и сконфигурирован определять, по меньшей мере, один предикатный параметр, определять, является ли, по меньшей мере, один предикатный параметр истинным и в то время как первый процессор управляет, по меньшей мере, одним компонентом, и, по меньшей мере, один предикатный параметр является истинным, принимать, от множества датчиков, множество наборов данных о вибрации. Предикатный параметр включает в себя скорость изменения параметра мотора горной машины. Достигается повышение безопасности эксплуатации горной машины. 2 н. и 24 з.п. ф-лы, 8 ил.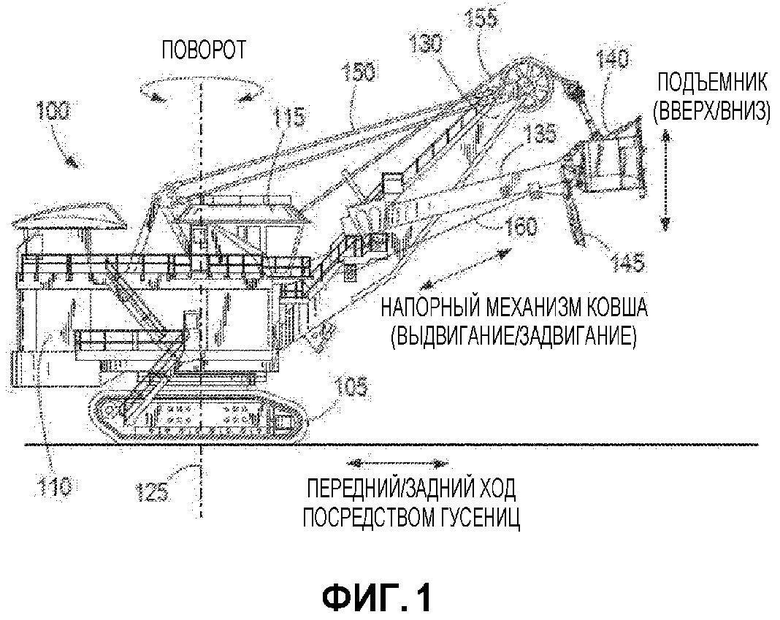
1. Горная машина, содержащая:
множество датчиков, каждый из множества датчиков располагается в одной из множества точек измерения, по меньшей мере, одного компонента горной машины;
первый электронный процессор, соединенный, по меньшей мере, с одним компонентом и сконфигурированный, чтобы
принимать, по меньшей мере, одну команду движения; и
управлять, по меньшей мере, одним компонентом на основе, по меньшей мере, одной команды движения; и
второй электронный процессор, соединенный с первым электронным процессором и множеством датчиков и сконфигурированный, чтобы
определять, по меньшей мере, один предикатный параметр; причем, по меньшей мере, один предикатный параметр включает в себя скорость изменения параметра мотора горной машины;
определять, является ли, по меньшей мере, один предикатный параметр истинным; и
в то время как первый электронный процессор управляет, по меньшей мере, одним компонентом, и, по меньшей мере, один предикатный параметр является истинным,
принимать, от множества датчиков, множество наборов данных о вибрации.
2. Горная машина по п. 1, в которой множество датчиков включают в себя множество акселерометров.
3. Горная машина по п. 1, в которой, по меньшей мере, один компонент является компонентом, выбранным из группы, состоящей из мотора подъемника и зубчатого вала; промежуточного вала подъемника; барабана подъемника; поворотного мотора и зубчатого вала; поворотного промежуточного вала; поворотного выходного вала; мотора напорного механизма ковша; входного вала напорного механизма ковша; и промежуточного вала напорного механизма ковша.
4. Горная машина по п. 1, в которой, скорость изменения параметра мотора горной машины представляет собой, по меньшей мере, одно, выбранное из группы, состоящей из допустимой мгновенной скорости изменения частоты вращения мотора; и допустимого скользящего среднего значения скорости изменения частоты вращения мотора, допустимой мгновенной скорости изменения крутящего момента мотора; допустимого скользящего среднего значения скорости изменения крутящего момента мотора.
5. Горная машина по п. 4, дополнительно содержащая:
по меньшей мере, один тахометр, расположенный для наблюдения за мотором горной машины;
при этом второй электронный процессор соединяется с тахометром и дополнительно сконфигурирован, чтобы
принимать, по меньшей мере, от одного тахометра, по меньшей мере, один сигнал тахометра; и
определять, является ли, по меньшей мере, один предикатный параметр истинным, на основе, по меньшей мере, одного сигнала тахометра.
6. Горная машина по п. 1, в которой, в дополнение к скорости изменения параметра мотора горной машины, по меньшей мере, один предикатный параметр включает в себя, по меньшей мере, одно, выбранное из группы, состоящей из состояния цифровой машины; допустимого диапазона крутящего момента мотора; направление вращения мотора, и допустимый диапазон частоты вращения мотора.
7. Горная машина по п. 1, в которой второй электронный процессор дополнительно конфигурируется, чтобы определять, превышает ли продолжительность, по меньшей мере, одного из множества наборов данных о вибрации желаемую продолжительность выборки.
8. Горная машина по п. 1, в которой второй электронный процессор дополнительно конфигурируется, чтобы выбирать поднабор данных о вибрации из одного из множества наборов данных о вибрации, причем поднабор данных выбран, чтобы быть записан в память и поднабор данных выбран на основе значения колебания параметра в поднаборе, сравненным с другими поднаборами из множества наборов данных вибрации.
9. Горная машина по п. 1, в которой второй электронный процессор дополнительно сконфигурирован, чтобы
определять, является ли каждый из множества наборов данных о вибрации действительным или недействительным; и
когда каждый из множества наборов данных о вибрации является действительным,
записывать множество наборов данных о вибрации в память; и
когда, по меньшей мере, один из множества наборов данных о вибрации является недействительным,
определять, было ли встречено пороговое значение отказов; и
когда пороговое значение отказов было встречено,
записывать флаг недействительности в метаданных; и
записывать множество наборов данных о вибрации и метаданные в памяти.
10. Горная машина по п.9, в которой пороговое значение отказов было определено как встреченное, когда наборы данных вибрации от конкретных датчиков, потерпели неудачу в течение определенного числа последовательных попыток.
11. Горная машина по п.9, в которой определение, является ли каждый из множества наборов данных о вибрации действительным или недействительным основано на определении, по меньшей мере, одного, выбранного из группы, содержащей:
постоянство среднего значения каждого из множества наборов данных вибрации при нулевом ускорении силы тяжести;
уровень частоты энергии каждого из множества наборов данных вибрации.
12. Горная машина по п. 1, в которой, по меньшей мере, одна команда движения включает в себя выбранное движение стадии тестирования.
13. Горная машина по п. 1, в которой второй электронный процессор сконфигурирован, чтобы принимать множество наборов данных о вибрации параллельно.
14. Способ сбора операционных данных о вибрации для горной машины, способ содержит этапы, на которых:
принимают, по меньшей мере, одну команду движения; и
управляют, по меньшей мере, одним компонентом на основе, по меньшей мере, одной команды движения;
определяют, посредством электронного процессора, по меньшей мере, один предикатный параметр, причем, по меньшей мере, один предикатный параметр включает в себя скорость изменения параметра мотора горной машины;
определяют, посредством электронного процессора, является ли, по меньшей мере, один предикатный параметр истинным; и
в то время как, по меньшей мере, один компонент управляется на основе, по меньшей мере, одной команды движения, и, по меньшей мере, один предикатный параметр является истинным,
принимают, посредством электронного процессора от множества датчиков, каждый из множества датчиков располагается в одной из множества точек измерения, по меньшей мере, на одном компоненте горной машины, множество наборов данных о вибрации.
15. Способ по п. 14, в котором прием множества наборов данных о вибрации включает в себя этап, на котором принимают множество наборов данных о вибрации от множества акселерометров.
16. Способ по п. 14, в котором управление, по меньшей мере, одним компонентом включает в себя этап, на котором управляют, по меньшей мере, одним компонентом, выбранным из группы, состоящей из мотора подъемника и зубчатого вала; промежуточного вала подъемника; барабана подъемника; поворотного мотора и зубчатого вала; поворотного промежуточного вала; поворотного выходного вала; мотора напорного механизма ковша; входного вала напорного механизма ковша; и промежуточного вала напорного механизма ковша.
17. Способ по п. 14, в котором определение скорости изменения параметра мотора горной машины включает в себя этап, на котором определяют, по меньшей мере, одно, выбранное из группы, состоящей из допустимой мгновенной скорости изменения частоты вращения мотора; и допустимого скользящего среднего значения скорости изменения частоты вращения мотора, допустимой мгновенной скорости изменения крутящего момента мотора; допустимого скользящего среднего значения скорости изменения крутящего момента мотора.
18. Способ по п. 17, дополнительно содержащий этапы, на которых:
принимают, по меньшей мере, от одного тахометра, расположенного для наблюдения за мотором горной машины, по меньшей мере, один сигнал тахометра; и
определяют, является ли, по меньшей мере, один предикатный параметр истинным, на основе, по меньшей мере, одного сигнала тахометра.
19. Способ по п. 14, в котором, в дополнение к скорости изменения параметра мотора горной машины, определение, по меньшей мере, один предикатный параметр дополнительно включает в себя, по меньшей мере, одно, выбранное из группы, состоящей из состояния цифровой машины; допустимого диапазона крутящего момента мотора; допустимой мгновенной скорости изменения крутящего момента мотора;
направления вращения мотора; и допустимого диапазона частоты вращения мотора.
20. Способ по п. 14, в котором прием множества наборов данных о вибрации включает в себя этап, на котором принимают множество наборов данных, пока продолжительность каждого из множества наборов данных о вибрации не превысит желаемую продолжительность выборки.
21. Способ по п. 14, дополнительно содержащий этапы, на которых:
определяют множество оптимальных поднаборов данных о вибрации, каждый выбирается из одного из множества наборов данных о вибрации, причем каждый из поднаборов данных выбран, чтобы быть записан в память и поднабор данных выбран на основе значения колебания параметра в поднаборе, сравненным с другими поднаборами из множества наборов данных вибрации.
22. Способ по п. 14, дополнительно содержащий этапы, на которых:
определяют, является ли каждый из множества наборов данных о вибрации действительным или недействительным; и
когда каждый из множества наборов данных о вибрации является действительным,
записывают множество наборов данных о вибрации в память; и
когда, по меньшей мере, один из множества наборов данных о вибрации является недействительным,
определяют, было ли встречено пороговое значение отказов; и
когда пороговое значение отказов было встречено,
записывают флаг недействительности в метаданных; и
записывают множество наборов данных о вибрации и метаданные в памяти.
23. Способ по п.22, в котором в которой пороговое значение отказов было определено как встреченное, когда наборы данных вибрации от конкретных датчиков, потерпели неудачу в течение определенного числа последовательных попыток.
24. Способ по п.22, в котором определение, является ли каждый из множества наборов данных о вибрации действительным или недействительным основано на определении, по меньшей мере, одного, выбранного из группы, содержащей:
постоянство среднего значения каждого из множества наборов данных вибрации при нулевом ускорении силы тяжести;
уровень частоты энергии каждого из множества наборов данных вибрации.
25. Способ по п. 14, в котором управление, по меньшей мере, одним компонентом на основе, по меньшей мере, одной команды движения включает в себя этап, на котором управляют, по меньшей мере, одним компонентом на основе выбранного движения стадии тестирования.
26. Способ по п. 14, в котором прием множества наборов данных о вибрации включает в себя этап, на котором принимают множество наборов данных параллельно.
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |

