ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Эта заявка заявляет преимущество приоритета предварительной заявки на патент США № 62/456,506, озаглавленной «Inverted Stewart Platform and Flying Reaction Deck» («Инвертированная платформа Стюарта и ярус полетных реакций»), поданной 8 февраля 2017, которая полностью включена в эту заявку по ссылке.
УРОВЕНЬ ТЕХНИКИ
[0002] Настоящее раскрытие относится, в общем, к области парков развлечений. Более конкретно, варианты осуществления настоящего раскрытия относятся к системам и способам аттракционов для катания, имеющим признаки, которые улучшают впечатление посетителей.
[0003] Для создания у посетителей уникальных интерактивных, двигательных и визуальных впечатлений, были созданы различные развлекательные аттракционы для катания и экспонаты. Например, традиционный аттракцион для катания может включать в себя транспортное средство, перемещающееся вдоль некоторого пути. Путь может включать в себя участки, которые вызывают движение транспортного средства (например, повороты, уклоны) или приводят в действие транспортное средство. Однако, традиционное приведение в действие транспортного средства для катания (например, посредством криволинейного пути) может быть дорогостоящим и может включать в себя большую площадь занимаемой поверхности. Дополнительно, традиционное приведение в действие транспортного средства для катания (например, посредством криволинейного пути) может быть ограничено в отношении некоторых требуемых движений и, таким образом, может не создавать требуемых чувств у пассажира. Соответственно, требуется улучшенное приведение в действие транспортного средства для катания.
КРАТКОЕ ОПИСАНИЕ
[0004] Некоторые варианты осуществления, соответствующие по объему исходно заявленному объекту изобретения, кратко изложены ниже. Эти варианты осуществления не предназначены для ограничения объема настоящего раскрытия, а скорее предназначены только для обеспечения краткого изложения некоторых раскрытых вариантов осуществления. Действительно, настоящее раскрытие может охватывать множество форм, которые могут быть подобными вариантам осуществления, изложенным ниже, или могут отличаться от них.
[0005] В одном варианте осуществления, система аттракциона для катания включает в себя основание, транспортное средство для катания, платформенный модуль, расположенный между основанием и транспортным средством для катания, и механизм продолжения, соединенный с платформенным модулем и расположенный между основанием и транспортным средством для катания. Платформенный модуль включает в себя первую платформу, вторую платформу, и шесть ножек, продолжающихся между первой платформой и второй платформой, и платформенный модуль выполнен с возможностью приводить в действие каждую из шести ножек с тем, чтобы перемещать первую платформу относительно второй платформы в разных конфигурациях на основе того, какие из шести ножек приведены в действие. Механизм продолжения выполнен с возможностью продолжаться и укорачиваться с тем, чтобы перемещать транспортное средство для катания от основания системы аттракциона для катания и по направлению к нему, соответственно.
[0006] В другом варианте осуществления, система аттракциона для катания включает в себя платформенный модуль, причем платформенный модуль включает в себя первую платформу, вторую платформу, и шесть ножек, продолжающихся между первой платформой и второй платформой. Первая платформа включает в себя первое крепежное положение, с которым соединены первая ножка и вторая ножка из шести ножек, второе крепежное положение, с которым соединены третья ножка и четвертая ножка из шести ножек, и третье крепежное положение, с которым соединены четвертая ножка и пятая ножка из шести ножек. Вторая платформа включает в себя четвертое крепежное положение, с которым соединены третья ножка и шестая ножка, пятое крепежное положение, с которым соединены вторая ножка и пятая ножка, и шестое крепежное положение, с которым соединены первая ножка и четвертая ножка. Первое крепежное положение выровнено с четвертым крепежным положением, когда шесть ножек имеют равные длины, второе крепежное положение выровнено с пятым крепежным положением, когда шесть ножек имеют равные длины, и третье крепежное положение выровнено с шестым крепежным положением, когда шесть ножек имеют равные длины.
[0007] В другом варианте осуществления, способ работы транспортного средства для катания включает в себя этап, на котором поддерживают, посредством множества кабелей, транспортное средство для катания под путем системы аттракциона для катания. Способ также включает в себя этап, на котором контролируют, посредством контроллера, силы, действующие в системе аттракциона для катания. Способ также включает в себя этап, на котором модулируют, посредством отдания контроллером команд множеству двигателей, соответствующих множеству кабелей, выходной крутящий момент множества двигателей на основе контролируемых сил, действующих в системе аттракциона для катания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Эти и другие признаки, аспекты и преимущества настоящего раскрытия станут лучше понятны после прочтения нижеследующего подробного описания со ссылкой на сопутствующие чертежи, в которых одинаковые ссылочные позиции представляют одинаковые части во всех чертежах, причем:
[0009] Фиг. 1 является схематической иллюстрацией одного варианта осуществления системы аттракциона для катания, имеющей платформенный модуль, механизм продолжения, и управляющие признаки обратной связи, согласно одному варианту осуществления настоящего раскрытия;
[0010] Фиг. 2 является схематической иллюстрацией вида сбоку одного варианта осуществления системы аттракциона для катания, включающей в себя ярус полетных реакций, имеющий платформенный модуль с инвертированной платформой Стюарта, согласно одному варианту осуществления настоящего раскрытия;
[0011] Фиг. 3 является схематической иллюстрацией вида сбоку одного варианта осуществления системы аттракциона для катания фиг. 2, имеющей ярус полетных реакций с инвертированной платформой Стюарта, согласно одному варианту осуществления настоящего раскрытия;
[0012] Фиг. 4 является схематической иллюстрацией перспективного изображения одного варианта осуществления системы аттракциона для катания фиг. 2, имеющей ярус полетных реакций с инвертированной платформой Стюарта, согласно одному варианту осуществления настоящего раскрытия;
[0013] Фиг. 5 является схематической иллюстрацией вида сбоку другого варианта осуществления системы аттракциона для катания, имеющей ярус полетных реакций с инвертированной платформой Стюарта, согласно одному варианту осуществления настоящего раскрытия;
[0014] Фиг. 6 является схематической иллюстрацией перспективного изображения одного варианта осуществления инвертированной платформы Стюарта, согласно одному варианту осуществления настоящего раскрытия;
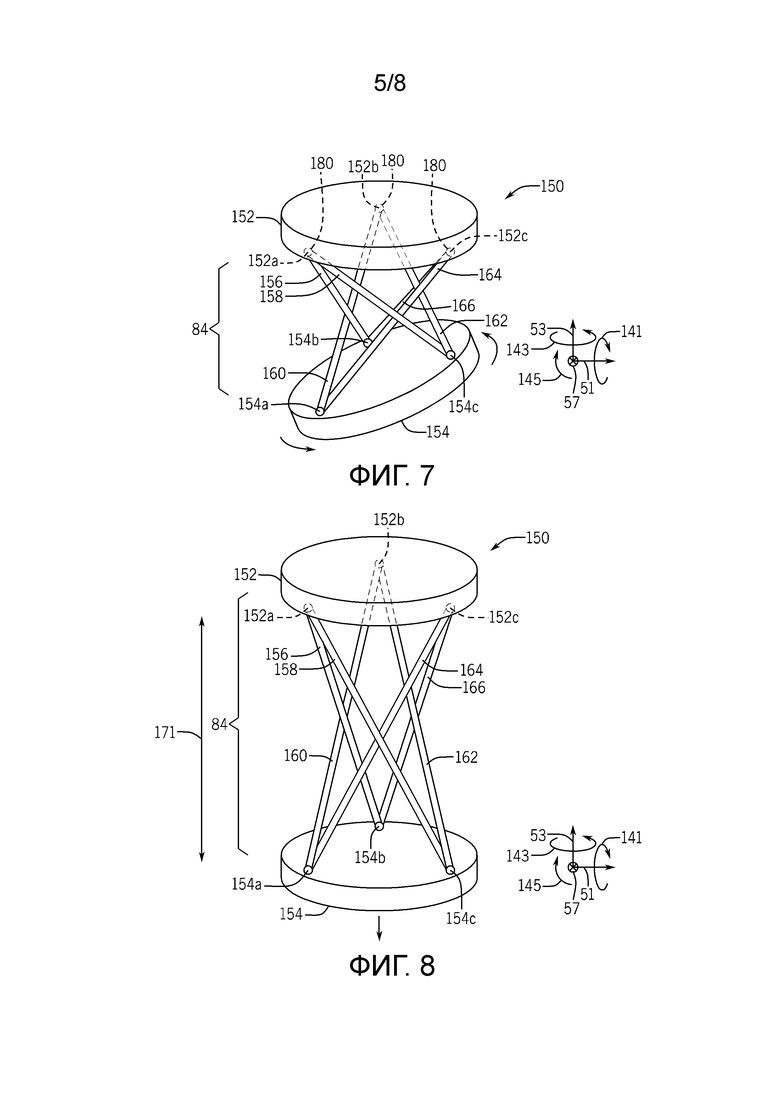
[0015] Фиг. 7 является схематической иллюстрацией перспективного изображения одного варианта осуществления инвертированной платформы Стюарта фиг. 6, согласно одному варианту осуществления настоящего раскрытия;
[0016] Фиг. 8 является схематической иллюстрацией перспективного изображения одного варианта осуществления инвертированной платформы Стюарта фиг. 6, согласно одному варианту осуществления настоящего раскрытия;
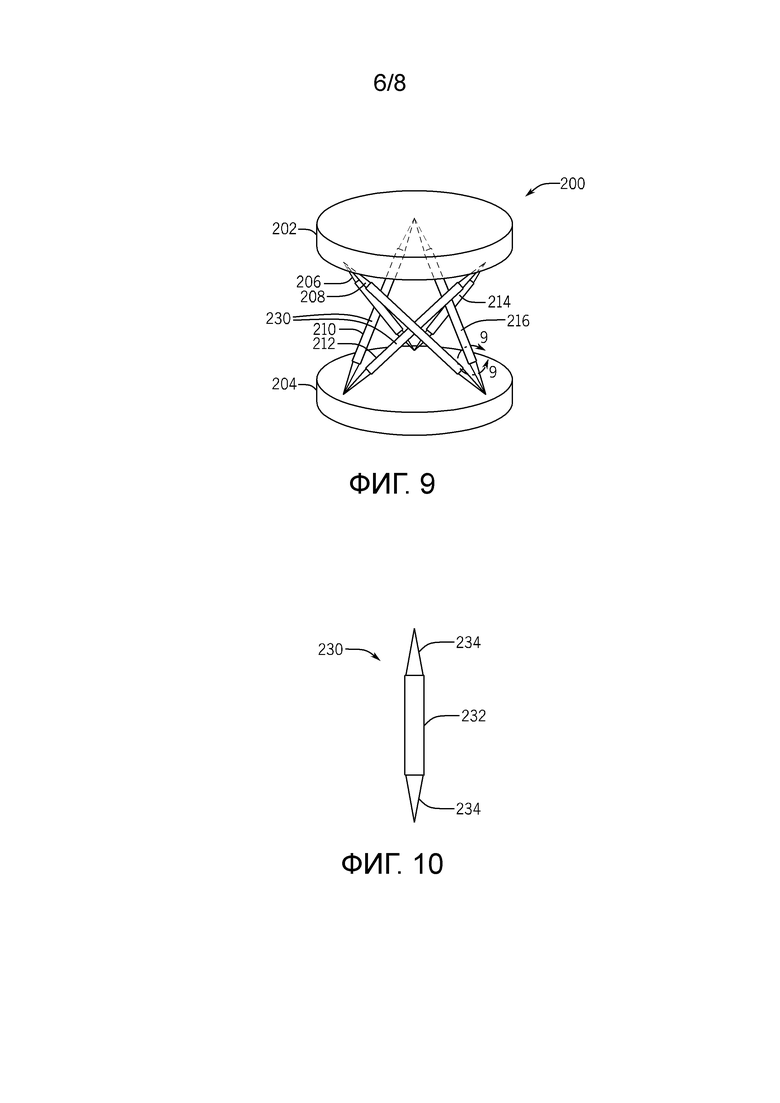
[0017] Фиг. 9 является схематической иллюстрацией перспективного изображения другого варианта осуществления инвертированной платформы Стюарта, согласно одному варианту осуществления настоящего раскрытия;
[0018] Фиг. 10 является схематической иллюстрацией перспективного изображения одного варианта осуществления исполнительного механизма, используемого в инвертированной платформе Стюарта фиг. 9, согласно одному варианту осуществления настоящего раскрытия;
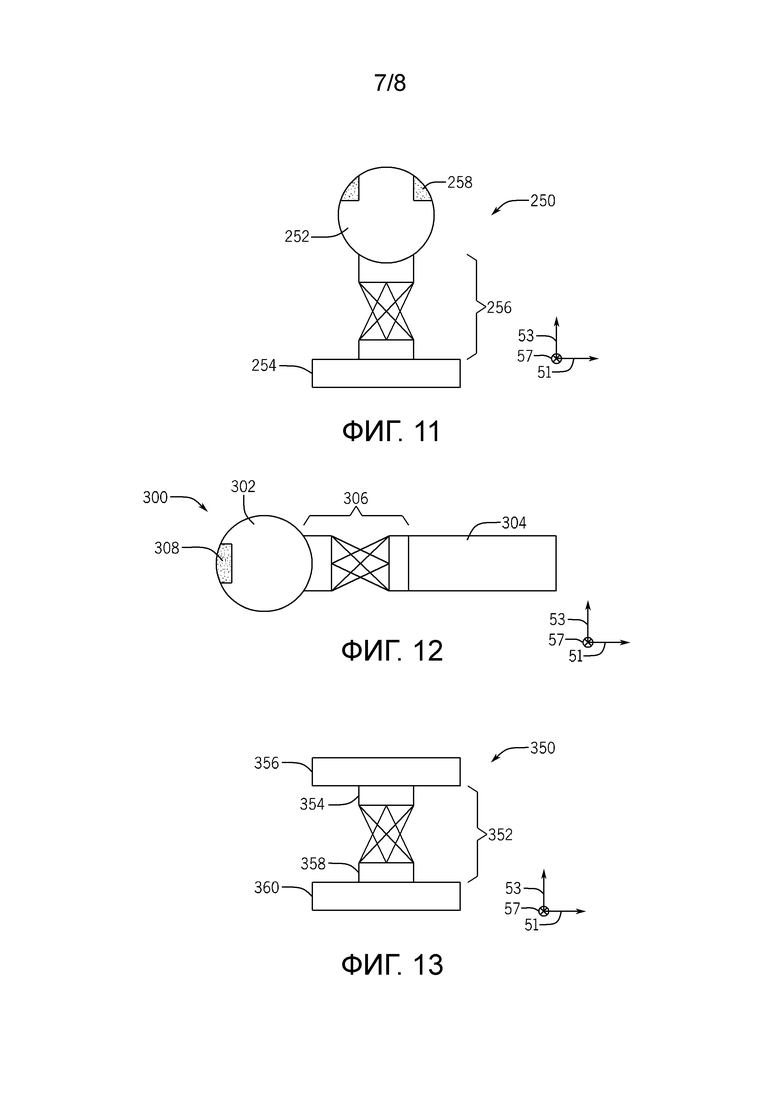
[0019] Фиг. 11 является схематической иллюстрацией вида сбоку другого варианта осуществления системы аттракциона для катания, имеющей ярус полетных реакций с инвертированной платформой Стюарта, согласно одному варианту осуществления настоящего раскрытия;
[0020] Фиг. 12 является схематической иллюстрацией вида сбоку другого варианта осуществления системы аттракциона для катания, имеющей ярус полетных реакций с инвертированной платформой Стюарта, согласно одному варианту осуществления настоящего раскрытия;
[0021] Фиг. 13 является схематической иллюстрацией вида сбоку другого варианта осуществления системы аттракциона для катания, имеющей ярус полетных реакций с инвертированной платформой Стюарта, согласно одному варианту осуществления настоящего раскрытия; и
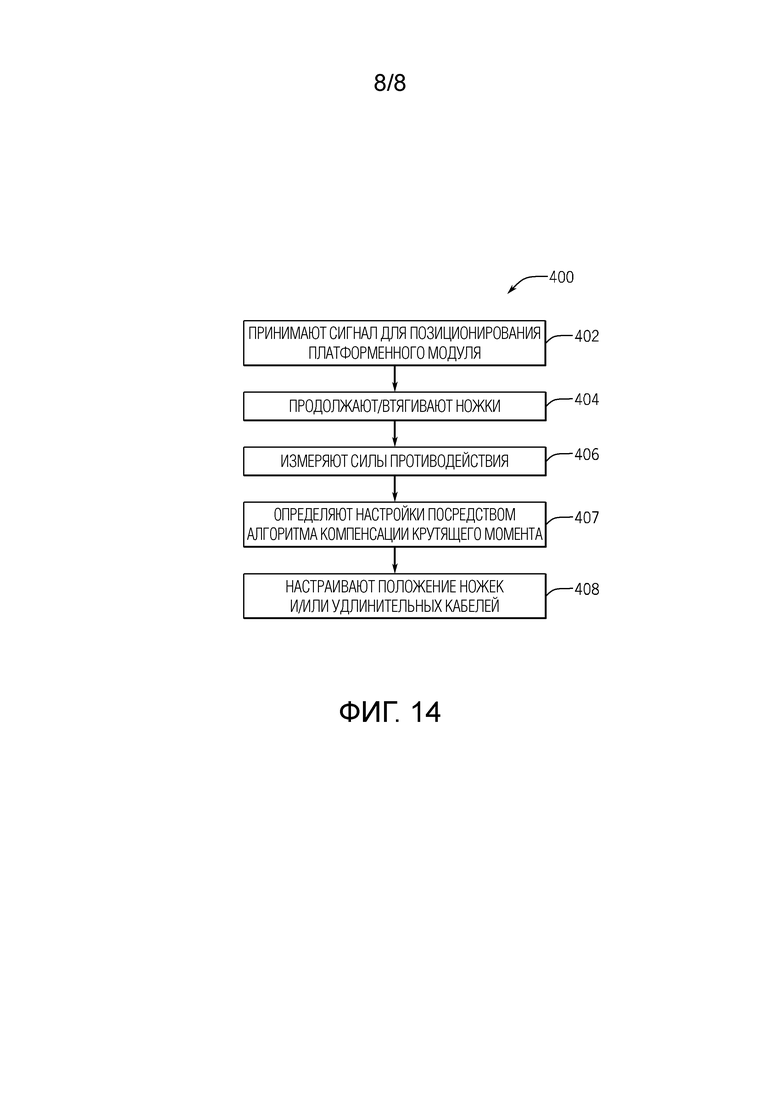
[0022] Фиг. 14 является блок–схемой, иллюстрирующей один вариант осуществления процесса управления ярусом полетных реакций, имеющим платформенный модуль с инвертированной платформой Стюарта, согласно одному варианту осуществления настоящего раскрытия.
ПОДРОБНОЕ ОПИСАНИЕ
[0023] Ниже будет описан один или несколько конкретных вариантов осуществления настоящего раскрытия. В стремлении обеспечить краткое описание этих вариантов осуществления, не все признаки фактической реализации могут быть описаны в описании изобретения. Следует понимать, что при разработке любой такой фактической реализации, как в любом техническом или конструкторском проекте, множественные специфические для реализации решения должны быть приняты для достижения конкретных целей разработчиков, например, должно быть обеспечено соответствие ограничениям, связанным с системой или с видом экономической деятельности, и эти решения могут изменяться в разных реализациях. Кроме того, следует понимать, что такие усилия по разработке могут быть сложными и требующими больших временных затрат, но могут быть, тем не менее, общепринятыми практическими мерами, предпринимаемыми в отношении проектирования, обработки и изготовления, для специалистов в данной области техники, получающих пользу от настоящего раскрытия.
[0024] Варианты осуществления настоящего раскрытия относятся к аттракционам для катания и экспонатам парков развлечений. Конкретно, аттракционы для катания и экспонаты включают в себя систему на основе движения и соответствующие технологии, которые могут быть выполнены с возможностью или предназначены для того, чтобы вызывать у пассажиров некоторые чувства, которые иначе были бы невозможны или были бы значительно меньшими в традиционных системах аттракционов для катания. В раскрытых здесь аттракционах для катания и экспонатах, впечатление пассажира может быть усилено посредством использования систем и технологий на основе движения. Например, система аттракциона для катания может включать в себя устройство, которое создает, или устройства, которые создают, вплоть до шести степеней свободы для обеспечения у пассажиров чувств, которые не могут обычно создаваться на основании традиционных способов (например, поворотов, уклонов). Устройство может включать в себя две платформы, которые соединены посредством ножек, продолжающихся между ними. Ножки соединены с конкретными местоположениями вдоль двух платформ и находятся под углами к двум платформам с тем, чтобы вызывать перемещение двух платформ друг относительно друга при приведении в действие ножек (или соответствующих признаков). Один способ, посредством которого платформы могут быть соединены посредством ножек, согласно настоящему раскрытию, называется здесь «инвертированной платформой Стюарта», которая отличается от традиционной платформы Стюарта. Традиционная платформа Стюарта может быть описана как платформа, имеющая противоположные платформы, которые соединены ножками, причем эти ножки продолжаются попарно из трех областей продолжения, находящихся на каждой из двух противоположных платформ. Инвертированная платформа Стюарта включает в себя шесть ножек, продолжающихся между противоположными платформами, причем упомянутые шесть ножек продолжаются из положений вдоль противоположных платформ и ориентированы между противоположными платформами такими способами, которые значительно отличаются от способов ориентации ножек в традиционной платформе Стюарта. Отличные положения/ориентации инвертированной платформы Стюарта, которые будут подробно описаны ниже со ссылкой на чертежи, выполнены с возможностью усиливать, среди прочего, устойчивость инвертированной платформы Стюарта и соответствующих компонентов аттракциона для катания.
[0025] В общем, первая из двух платформ инвертированной платформы Стюарта, упомянутой выше, может быть соединена с (или может соответствовать) транспортным средством аттракциона для катания или экспоната парка развлечений, в то время как вторая из двух платформ может быть соединена с (или может соответствовать) путем аттракциона для катания парка развлечений (или основанием экспоната). В некоторых вариантах осуществления, механизм продолжения может быть расположен между первой платформой и транспортным средством для катания, или между второй платформой и путем или основанием. Ножки, соединяющие первую и вторую платформы, могут управляться (например, могут быть втянуты, продолжены, или приведены в действие иным образом) таким образом, чтобы они перемещали первую платформу относительно второй платформы, и посредством этого вызывали перемещение транспортного средства для катания, соединенного с первой платформой (или соответствующего ей), вместе с первой платформой. В вариантах осуществления, имеющих описанный выше механизм продолжения, механизм продолжения может быть приведен в действие независимо от или вместе с описанными выше ножками инвертированной платформы Стюарта для увеличения, дополнения или взаимодействия с перемещением и соответствующими чувствами, вызываемыми инвертированной платформой Стюарта.
[0026] Описываемые здесь варианты осуществления допускают широкий диапазон движения без необходимости использования криволинейного пути. Таким образом, площадь занимаемой поверхности системы аттракциона для катания согласно настоящим вариантам осуществления может быть уменьшена. Дополнительно, раскрытые здесь варианты осуществления могут увеличить диапазон движения транспортного средства для катания, могут обеспечить более точно настроенное приведение в действие, чем в традиционных системах аттракционов для катания. Например, более широкий диапазон движения может быть обеспечен посредством инвертированной платформы Стюарта, и инвертированная платформа Стюарта может обеспечить улучшенную устойчивость аттракциона для катания. Более того, приведение в действие может быть обеспечено для транспортного средства для катания без визуализации для пассажиров транспортного средства для катания источника приведения в действие. По существу, раскрытые здесь варианты осуществления могут усилить впечатление от аттракциона для катания посредством погружения пассажира в трехмерную среду без очевидного пути или основания. В некоторых вариантах осуществления, среда системы аттракциона для катания может включать в себя признаки, отдельные то транспортного средства и/или пути, причем признаки среды могут быть расположены, ориентированы, или, иначе, размещены таким образом, чтобы казалось, словно сами признаки среды обеспечивают приведение в действие транспортного средства для катания, которое, как описано выше, фактически исходит от инвертированной платформы Стюарта и/или механизма продолжения. Другими словами, раскрытые здесь варианты осуществления могут обеспечивать приведение в действие посредством компонентов, которые не могут восприниматься пассажирами транспортного средства для катания. Дополнительно, настоящие варианты осуществления могут позволить разработчикам аттракционов для катания обеспечивать моделируемые впечатления, включающие в себя смещение, скорость, ускорение, и толчки при нахождении на любом участке пути аттракциона для катания, что может уменьшить затраты и сложность разработки. Более того, раскрытые варианты осуществления выполнены с возможностью детектировать и контролировать силы противодействия, связанные с перемещением транспортного средства для катания. Эти и другие признаки будут подробно описаны ниже со ссылкой на чертежи.
[0027] Дополнительно к вышеупомянутым аспектам, расположение управляемой оси движения согласно настоящему раскрытию обеспечивает геометрическую устойчивость вследствие более острых углов приведения в действие, чем в общепринятых подходах, для данной большой объемной оболочки с подвижным основанием. В одном предпочтительном варианте осуществления, это эквивалентно большим составляющим силы в направлениях, стабилизирующих поперечное перемещение между плоскостями установки подвижного основания. Дополнительно, уменьшенные углы приведения в действие могут обеспечить меньшие размеры платформ, что подробно описано ниже со ссылкой на чертежи.
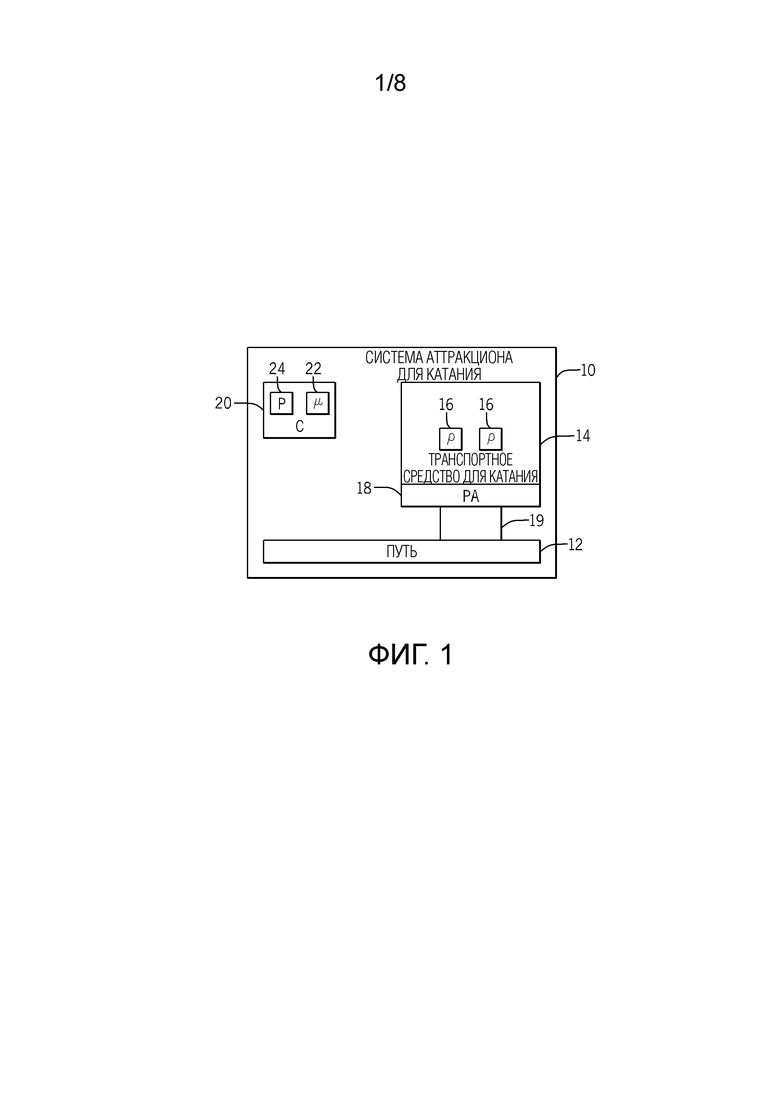
[0028] Фиг. 1 является схематической иллюстрацией одного варианта осуществления системы 10 аттракциона для катания, имеющей путь 12. Путь 12 может быть замкнутым контуром, так что транспортное средство 14 для катания системы 10 аттракциона для катания стартует на одном участке пути 12 и в конце концов возвращается на тот же самый участок пути 12. Путь 12 может включать в себя повороты, подъемы или спуски, или путь (или его участки) может продолжаться в единственном направлении. В некоторых вариантах осуществления, транспортное средство 14 для катания может перемещаться ниже пути 12 (т.е. под ним) на протяжении всего пути или на его участках. Транспортное средство 14 для катания может включать в себя множественных пассажиров 16, которые могут располагаться в транспортном средстве 14 для катания. В некоторых вариантах осуществления, транспортное средство 14 для катания может включать в себя оболочку (например, кабину) для защиты пассажиров 16. Пассажиры 16 могут садиться в транспортное средство 14 для катания или высаживаться из него на некотором участке (например, на причале) пути 12. В других вариантах осуществления, аттракцион для катания может не включать в себя или не использовать в качестве своей части путь 12.
[0029] Дополнительно, транспортное средство 14 для катания может также включать в себя платформенный модуль 18, который порождает движение транспортного средства 14 для катания. В некоторых вариантах осуществления, платформенный модуль 18 может быть прямо соединен с путем 12 и/или прямо соединен с транспортным средством 14 для катания. В других вариантах осуществления, платформенный модуль 18 может быть непрямо соединен с путем 12 и/или непрямо соединен с транспортным средством 14 для катания, что означает, что промежуточные компоненты могут отделять платформенный модуль 18 от пути 12 и/или транспортного средства 14 для катания. Платформенный модуль 18 может порождать движение (например, крен, наклон, отклонение) транспортного средства 14 для катания для усиления впечатления пассажиров 16. В некоторых вариантах осуществления, механизм 19 продолжения может быть расположен между платформенным модулем 18 и путем 12 (как показано), или между платформенным модулем 18 и транспортным средством 14 для катания. Платформенный модуль 18 и механизм 19 продолжения могут быть коммуникационно связаны с контроллером 20, который может отдавать команды платформенному модулю 18 и/или механизму 19 продолжения для обеспечения вышеупомянутых движений. Посредством использования платформенного модуля 18 и/или механизма 19 продолжения для порождения некоторых движений транспортного средства 14 для катания, признаки (например, формы) пути 12, которые иначе были бы дорогостоящими и увеличивали площадь занимаемой поверхности системы 10 аттракциона для катания, могут быть уменьшены или устранены.
[0030] Контроллер 20 может быть расположен в системе 10 аттракциона для катания (например, в каждом транспортном средстве 14 для катания, или где–либо на пути 12) или может быть расположен за пределами системы 10 аттракциона для катания (например, для дистанционного управления системой 10 аттракциона для катания). Контроллер 20 может включать в себя память 22 с хранимыми командами для управления компонентами системы 10 аттракциона для катания, такими как платформенный модуль 18. Дополнительно, контроллер 20 может включать в себя процессор 24, выполненный с возможностью выполнять такие команды. Например, процессор 24 может включать в себя одну или несколько специализированных интегральных схем (application specific integrated circuit – ASIC), одну или несколько матриц программируемых логических вентилей (field programmable gate array – FPGA), один или несколько процессоров общего назначения, или любую их комбинацию. Дополнительно, память 22 может включать в себя энергозависимую память, такую как память с произвольным доступом (random access memory – RAM), и/или энергонезависимую память, такую как постоянное запоминающее устройство (read–only memory – ROM), оптические накопители, накопители на жестких дисках, или твердотельные накопители.
[0031] Платформенный модуль 18 может включать в себя инвертированную платформу Стюарта. Примеры инвертированной платформы Стюарта подробно показаны на фиг. 6–9, которые подробно описаны ниже. В общем, инвертированная платформа Стюарта включает в себя две платформы, между которыми продолжаются ножки (например, шесть ножек) инвертированной платформы Стюарта. Каждая платформа включает в себя три контактные области (например, «крепежные положения»), с которыми соединены ножки. В некоторых вариантах осуществления, каждая контактная область (например, крепежное положение) на одной из платформ может включать в себя лебедку или лебедки, выполненные с возможностью принимать ножки, или отверстие, через которое ножки продолжаются для соединения с лебедкой или лебедками на другой стороне платформы.
[0032] Поскольку каждая платформа, например, первая платформа, включает в себя три контактные области и шесть ножек, продолжающихся из них, первая пара ножек продолжается из первой контактной области первой платформы, вторая пара ножек продолжается из второй контактной области первой платформы, и третья пара ножек продолжается из третьей контактной области первой платформы. Шесть ножек выполнены с возможностью быть приводимыми в действие (например, посредством вышеупомянутых лебедок) таким образом, чтобы длины шести ножек изменялись во время работы инвертированной платформы Стюарта. Например, ножки могут быть приведены в действие независимо, приведены в действие попарно, или приведены в действие в различных расположениях таким образом, чтобы разные ножки имели разные длины во время некоторых режимов работы. Согласно настоящему раскрытию, когда все шесть ножек имеют равные длины, две платформы являются параллельными друг другу (например, «параллельное положение» инвертированной платформы Стюарта). Дополнительно, когда все шесть ножек имеют равные длины, три контактные области первой платформы выравниваются по окружности с тремя контактными областями второй платформы. Другими словами, если смотреть прямо сверху или снизу на инвертированную платформу Стюарта, то вышеупомянутые три контактные области первой платформы и три точки отсчета второй платформы будут расположены в выровненных угловых положениях. А именно, соответствующие контактные области на первой и второй платформах выровнены в этой конфигурации, и они распределены, в общем, вдоль окружностей каждой из первой и второй платформ (или радиально внутрь от этих окружностей). Более того, когда все шесть ножек имеют равные длины, угол, образованный между отдельной ножкой и одной из платформ может составлять 45 градусов или менее, согласно одному варианту осуществления настоящего раскрытия. Эти признаки, среди прочего, обеспечивают улучшенную устойчивость инвертированной платформы Стюарта относительно традиционных платформ.
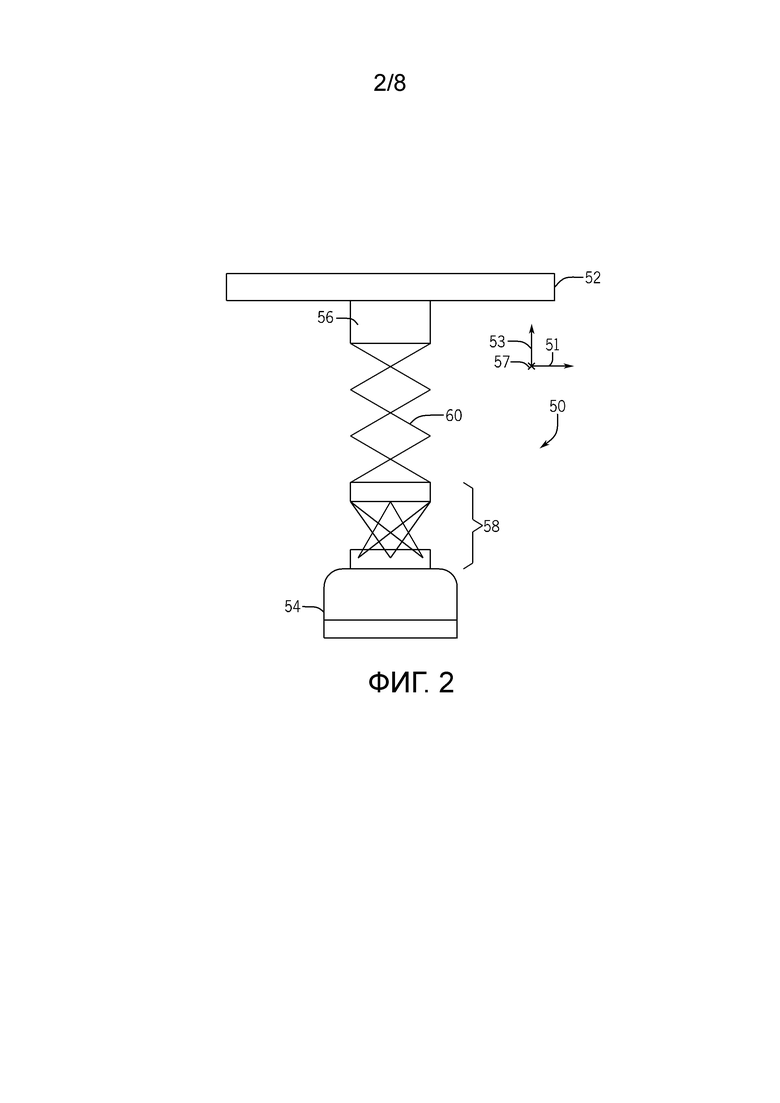
[0033] Фиг. 2 показывает другой вариант осуществления системы 50 аттракциона для катания согласно настоящим вариантам осуществления. Система 50 аттракциона для катания включает в себя инвертированную платформу 58 Стюарта и механизм 60 продолжения, которые в совокупности или по отдельности могут называться «ярусом полетных реакций» (или участком «яруса полетных реакций»). Следует отметить, что механизм 60 продолжения и/или инвертированная платформа 58 Стюарта (или другой платформенный модуль) могут называться «ярусом полетных реакций», поскольку они порождают движение транспортного средства 54 для катания системы 50 аттракциона для катания без использования изгибов пути 52 системы 50 аттракциона для катания, и поскольку пассажир (пассажиры) может не знать об источнике движения. Таким образом, ярус полетных реакций выполнен с возможностью вызывать некоторые чувства у пассажиров, находящихся в транспортном средстве 54 для катания, посредством перемещения.
[0034] В качестве одного примера, механизм 60 продолжения (или ярус полетных реакций, или его часть) может обеспечивать дополнительную сложность перемещения для системы аттракциона для катания, которая включает в себя простой путь. В качестве конкретного примера, система аттракциона для катания с прямым путем может быть выполнена с возможностью создавать ощущение, словно имеются возвышения, впадины и/или изгибы, с использованием механизма 60 продолжения. Таким образом, механизм 60 продолжения перемещает транспортное средство 54 для катания без необходимости использования криволинейного пути большой площади для порождения движений. Посредством уменьшения изгибов (и, таким образом, площади) пути 52, компоненты системы 50 аттракциона для катания могут быть расположены на меньшей площади и при этом все же смогут вызывать у пассажиров транспортного средства 54 для катания чувства, которые в традиционных вариантах осуществления потребовали бы больших площадей. Инвертированная платформа 58 Стюарта может также порождать движения (например, крен, наклон, отклонение), которые, в традиционных вариантах осуществления, могут порождаться путем. Следует также отметить, что в других вариантах осуществления может быть использован платформенный модуль, отличный от вышеупомянутой инвертированной платформы 58 Стюарта. Дополнительно, инвертированная платформа 58 Стюарта схематично показана на фиг. 2, но более подробные примеры обеспечены на фиг. 6–9.
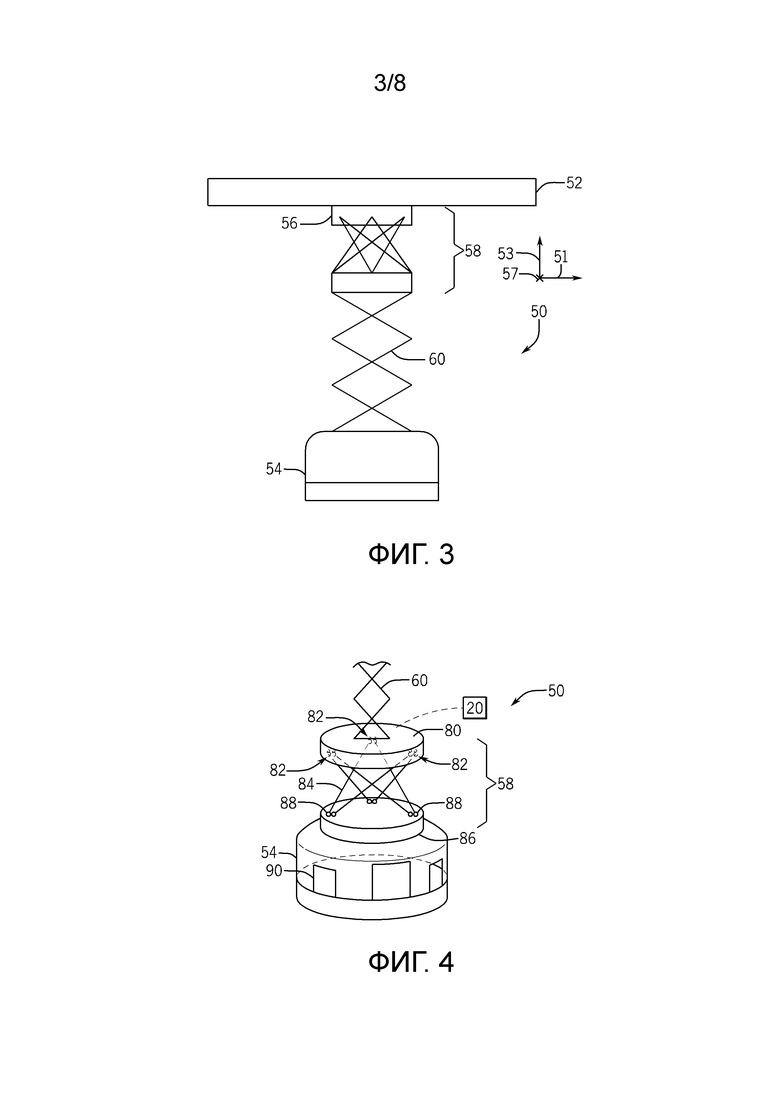
[0035] В продолжение варианта осуществления, показанного на фиг. 2, путь 52 прямо соединен с опорой 56 (например, тележкой). В некоторых вариантах осуществления, опора 56 может использовать колеса, которые могут прикрепляться к пути 52 и катиться по нему. Опора 56 может быть соединена с инвертированной платформой 58 Стюарта посредством вышеупомянутого механизма 60 продолжения. Механизм 60 продолжения может использовать ножничный подъемник, исполнительные механизмы (например, гидравлические или пневматические), или любую их комбинацию для соединения опоры 56 с инвертированной платформой 58 Стюарта. Механизм 60 продолжения может обеспечивать одну степень свободы (например, вертикальное расположение в направление 53) или более для транспортного средства 14 для катания. Например, при перемещении транспортного средства 54 для катания вдоль пути 52, транспортное средство 54 для катания может проходить через сегмент пути 52, на котором требуется поднять транспортное средство 54 для катания. Таким образом, вместо использования кривизны пути 52 в направлении 53 для перемещения транспортного средства 54 для катания в направлении 53, механизм 60 продолжения может активироваться для подъема транспортного средства 54 для катания в соответствующее вертикальное положение. Таким образом, механизм 60 продолжения может управлять положением транспортного средства 54 для катания вдоль направления 53 без создания возвышений или уклонов на пути 52, что уменьшает затраты на изготовление пути 52. Другой вариант осуществления системы 50 аттракциона для катания показан на фиг. 3, где инвертированная платформа 58 Стюарта прямо соединена с опорой 56 и/или путем 52, и механизм 60 продолжения соединен с транспортным средством 54 для катания между транспортным средством 54 для катания и инвертированной платформой 58 Стюарта.
[0036] Фиг. 4 является схематической иллюстрацией перспективного изображения варианта осуществления системы 50 аттракциона для катания фиг. 2 с дополнительными подробностями. Как показано на фиг. 4, механизм 60 продолжения соединен с верхней платформой 80 инвертированной платформы 58 Стюарта. Лебедки 82 могут быть расположены, в общем, вдоль внешнего периметра верхней платформы 80 (или радиально внутрь от него). Инвертированная платформа 58 Стюарта включает в себя набор ножек 84 (например, шесть ножек), которые соединяют верхнюю платформу 80 с нижней платформой 86. В некоторых вариантах осуществления, ножки 84, которые продолжаются между двумя платформами 80, 86, могут быть кабелями или канатами, которые соединены с лебедками 82, находящимися на верхней платформе 80. Таким образом, лебедки 82 могут продолжать и/или втягивать соответствующие ножки 84 для обеспечения требуемого движения. Лебедки 82 могут быть коммуникационно связаны с контроллером 20, который управляет тем, когда будут продолжаться и/или втягиваться ножки 84, посредством отдания команд на приведение в действие лебедок 82. Например, в некоторых вариантах осуществления, контроллер 20 может быть запрограммирован активировать лебедки 82 для продолжения и/или втягивания ножек 84 в конкретные интервалы времени (например, на конкретных сегментах вдоль замкнутого контура пути). Контроллер 20 может управлять лебедками 82 независимо, попарно, или иным образом, чтобы ножки 84 могли управляться независимо, управляться попарно, или управляться иным образом, соответственно. Дополнительно, контроллер 20 может контролировать силы, действующие на ножки 84 инвертированной платформы 58 Стюарта, для обеспечения того, чтобы порождаемые движения оставались в пределах требуемых порогов. Следует отметить, что в некоторых вариантах осуществления лебедки 82 могут быть соединены с нижней платформой 86 вместо верхней платформы 80, или альтернативно могут быть присоединены между верхней и нижней платформами 80, 86. Еще в других вариантах осуществления, могут быть пары лебедок, которые соединяются друг с другом посредством единственного троса (например, кабеля или каната) для обеспечения избыточности и дополнительных возможностей (например, скорости продолжения или втягивания).
[0037] В показанном варианте осуществления, ножки 84 соединены с нижней платформой 86 в точках 88 крепления (или областях крепления) посредством зажимов, крюков, сварных соединений, других пригодных соединительных элементов, или любой их комбинации. Точки 88 крепления надежно соединяют ножки 84 с нижней платформой 86. Нижняя платформа 86 соединена с транспортным средством 54 для катания. Таким образом, лебедки 82, находящиеся вдоль верхней платформы 50, приводятся в действие для изменения длин ножек 84, лебедки 82 тянут нижнюю платформу 86 и прикрепленное транспортное средство 54 для катания посредством ножек 84 по направлению к верхней платформе 50. Следует отметить, что в то время как описание, приведенное выше, относится к трем контактным областям (например, «крепежным положениям»), находящимся вдоль каждой платформы, каждая платформа может фактически включать в себя шесть контактных областей (например, «крепежных положений»), сгруппированных попарно, причем две контактные области данной пары расположены непосредственно смежно друг с другом.
[0038] Варианты осуществления системы аттракциона для катания, показанные на фиг. 2–4, позволяют перемещать инвертированную платформу 58 Стюарта и механизм 60 продолжения вместе с транспортным средством 54 для катания. Дополнительно, инвертированная платформа 58 Стюарта и механизм 60 продолжения могут быть скрыты от глаз пассажиров, расположенных в транспортном средстве 54 для катания (например, на основе ограниченного поля зрения, создаваемого положениями окон 90, расположенных на транспортном средстве 54 для катания). По существу, пассажиры, расположенные в транспортном средстве 54 для катания, могут быть неспособными предвидеть, когда может возникнуть движение. Это может обеспечить то, что неожиданные движения будут усиливать впечатление пассажиров. Дополнительно, поскольку инвертированная платформа 58 Стюарта и механизм 60 продолжения перемещаются с транспортным средством 54 для катания, движения могут быть порождены на любом участке пути 52 и не ограничены элементами, расположенными на пути 52. Это обеспечивает большую гибкость в порождении движений и чувств и может также уменьшить затраты на изготовление системы 10 аттракциона для катания, поскольку дополнительные элементы (например, дополнительные исполнительные механизмы или сегменты пути), которые порождают движение, могут быть заменены этими признаками. Дополнительно, размер пути 52 может быть уменьшен, поскольку механизм 60 продолжения и инвертированная платформа 58 Стюарта используются для порождения некоторых движений вместо кривизны пути, которая иначе могла бы увеличить площадь занимаемой поверхности пути. В некоторых вариантах осуществления, показанный механизм 60 продолжения и инвертированная платформа 58 Стюарта могут быть использованы в экспонате, который не включает в себя аттракцион для катания (например, в котором путь 52 и опора 56, показанные на фиг. 2, заменены неподвижным основанием или основанием с ограниченным диапазоном перемещения). В каждой из фиг. 2–4, раскрытая инвертированная платформа Стюарта, механизм 60 продолжения, или они оба выполнены с возможностью управлять силами противодействия, связанными с перемещением транспортного средства 54 для катания во время работы системы 50 аттракциона для катания.
[0039] В другом варианте осуществления системы 50 аттракциона для катания, схематично показанном на фиг. 4, вместо механизма 60 продолжения фиг. 2–4 (который использует ножничный подъемник) могут быть использованы кабели 110. Эти кабели 110 могут быть частью системы приведения в действие (например, выполненной с возможностью продолжать или втягивать кабели 110 посредством лебедки) или могут быть неподвижными. В любом случае, могут возникать режимы работы, при которых требуется отдельное управление каждым из кабелей 110 и/или ножками инвертированной платформы 58 Стюарта в ответ на силы противодействия, связанные с перемещением транспортного средства 54 для катания. Например, если на одном конце транспортного средства 54 для катания будет расположено больше пассажиров, чем на других концах, или если работа платформенного модуля 58 (например, инвертированной платформы Стюарта) будет смещать вес транспортного средства 54 для катания в ходе работы, то перемещение транспортного средства 54 для катания может быть по меньшей мере частично зависящим от цикла. А именно, силы противодействия, вызванные перемещением транспортного средства 54 для катания, могут отличаться в разных рабочих циклах, и отдельное управление кабелями 110 и/или ножками платформенного модуля 58 (например, инвертированной платформы Стюарта) в ответ на силы противодействия может увеличить устойчивость системы 50 аттракциона для катания. В таких ситуациях, технологии управления могут быть тогда реализованы таким образом, чтобы зависящие от цикла силы противодействия управлялись посредством обратной связи управления. Например, контроллер 20 может принимать сигналы обратной связи по датчикам от датчиков 111, рассосредоточенных по системе 50. Датчики 111 могут быть расположены у опоры 56, на пути 52, у платформенного модуля 58, на транспортном средстве 54 для катания, или где–либо еще. Датчики 111 могут включать в себя датчики крутящего момента или другие пригодные датчики, которые детектируют крутящий момент транспортного средства 54 для катания. В некоторых вариантах осуществления, датчики 111 могут включать в себя оптические датчики (или другие пригодные датчики), которые детектируют положение или ориентацию транспортного средства 54 для катания, которые могут отражать крутящий момент или кручение транспортного средства 54 для катания. Например, положение или ориентация транспортного средства 54 для катания могут отражать силы, действующие в системе 50.
[0040] Контроллер 20 может анализировать сигналы обратной связи по датчикам от одного или нескольких датчиков 111 и может использовать алгоритм компенсации крутящего момента для инициирования управления натяжением кабелей 110 и/или для инициирования продолжения/втягивания ножек 84 двигателями (например, связанными с лебедками 82 фиг. 4) или другими исполнительными механизмами (например, показанными и описанными в отношении фиг. 9 и 10). В некоторых вариантах осуществления, каждый из датчиков 111 может быть частью соответствующего двигателя или другого исполнительного механизма, который управляет кабелями 110 и/или ножками 84 платформенного модуля 58 (например, инвертированной платформы Стюарта), таким образом, двигатели или другие исполнительные механизмы управляют кабелями 110 и/или ножками 84 на основе детектируемых параметров. При этом может предотвращаться провисание кабелей 110 и/или ножек 84. Другими словами, алгоритм компенсации крутящего момента может контролировать силы, действующие в системе 50 аттракциона для катания, для модуляции выходного крутящего момента двигателей или других исполнительных механизмов, управляющих перемещением ножек 84 и/или кабелей 110, для предотвращения провисания, что увеличивает устойчивость системы 50 аттракциона для катания.
[0041] Варианты осуществления, показанные на фиг. 2–5, могут также обеспечивать улучшенную способность поддержания устойчивости транспортного средства 54 для катания, когда транспортное средство для катания подвергается воздействию внешних возмущений (например, посредством водяных струй), которые могут быть использованы для направления транспортного средства 54 для катания вдоль пути. Действительно, как отмечено выше, перемещение транспортного средства 54 для катания может отличаться в разных рабочих циклах и в некоторых случаях может зависеть от внешних возмущений, которые связаны или не связаны с системой 50 аттракциона для катания. Реализация крутящего момента, натяжения, и/или другой обратной связи позволяет обеспечить устойчивость транспортного средства 54 для катания даже тогда, когда положение, ориентация, и общее движение транспортного средства 54 для катания динамически изменяется в ходе катания или в разных рабочих циклах, независимо от того, вызвано ли это движение признаками системы 50 аттракциона для катания или внешними признаками, которые взаимодействуют с системой 50 аттракциона для катания.
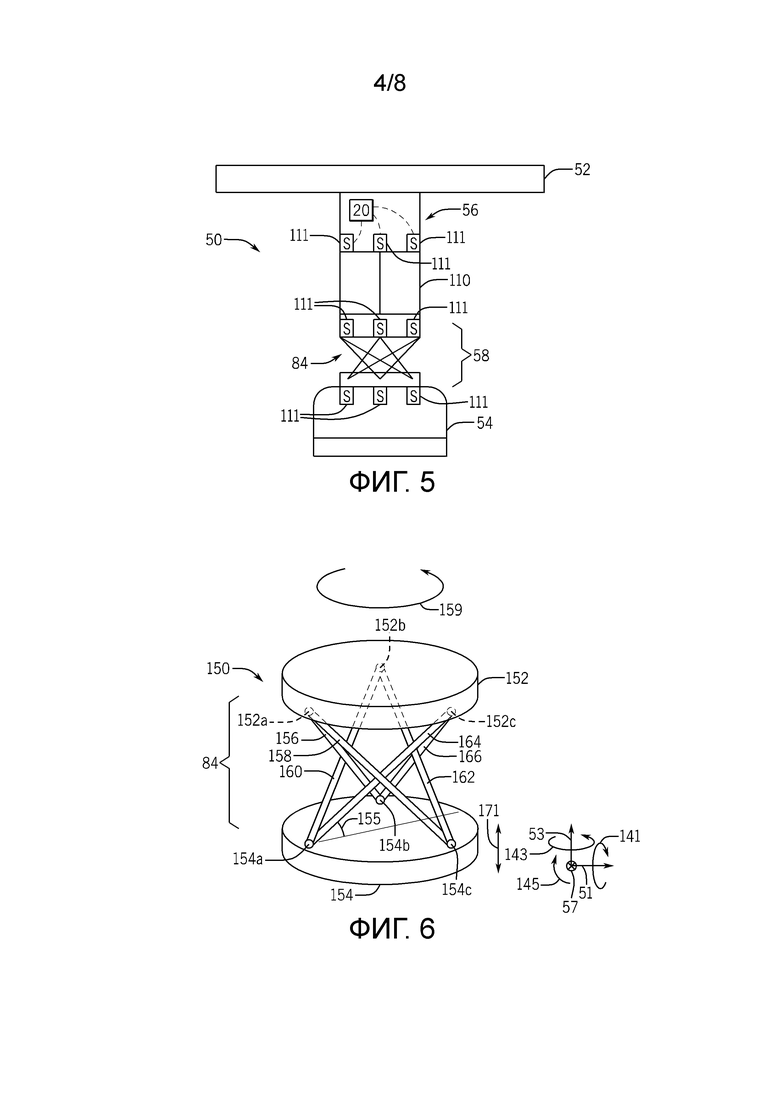
[0042] Фиг. 6 является схематической иллюстрацией варианта осуществления инвертированной платформы 150 Стюарта, подобной инвертированным платформам Стюарта, показанным в предыдущих чертежах. Инвертированная платформа 150 Стюарта включает в себя первую платформу 152 (например, верхнюю платформу), вторую платформу 154 (например, нижнюю платформу), и шесть ножек 156, 158, 160, 162, 164, 166 (в совокупности называемых «ножками 84»), продолжающихся между верхней платформой 152 и нижней платформой 154. Шесть ножек 84 могут быть втягиваемыми и продолжаемыми независимо и/или вместе друг с другом таким образом, чтобы одна из верхней и нижней платформ 152, 154 или они обе могли быть перемещены в соответствии с любой из шести степеней свободы (например, направление 51, направление 53, направление 57, крен 141, наклон 143 и отклонение 145). В некоторых вариантах осуществления, нижняя платформа 154 может быть соединена или может быть единым целым с транспортным средством для катания, в котором расположены множественные пассажиры. Соответственно, при приведении в действие шести ножек 84 (например, при втягивании/продолжении), нижняя платформа 154 и транспортное средство для катания могут быть перемещены в соответствии с любой из шести степеней свободы. Дополнительно, в некоторых вариантах осуществления, верхняя платформа 152 может быть соединена или может быть единым целым с путем системы аттракциона для катания таким образом, чтобы транспортное средство для катания размещалось под путем. Таким образом, когда верхняя платформа 152 скользит вдоль пути системы аттракциона для катания, нижняя платформа 154 и соответствующее транспортное средство для катания перемещаются вдоль того же самого пути. В других вариантах осуществления может быть использовано обратное расположение, при котором транспортное средство для катания продолжается над путем, и нижняя платформа 154 соединена с транспортным средством для катания.
[0043] В показанном варианте осуществления, верхняя платформа 152 включает в себя три контактные области 152a, 152b, 152c (например, «крепежные положения»), и нижняя платформа 154 включает в себя три другие контактные области 154a, 154b, 154c (например, крепежные положения), которые, в пределах соответствующих верхней и нижней платформ 152, 154, расположены по окружности по существу на одинаковом расстоянии друг от друга вдоль периметра соответствующей верхней и нижней платформ 152, 154. Как описано выше, лебедки могут быть расположены в контактных областях 152a, 152b, 152c, в контактных областях 154a, 154b, 154c, или и в тех и в других контактных областях, и могут быть выполнены с возможностью продолжать/втягивать ножки 84 (например, посредством двигателей лебедок или двигателей, связанных с лебедками).
[0044] Как показано, каждая контактная область 152a, 152b, 152c, 154a, 154b, 154c принимает две из шести ножек 84. Дополнительно, когда все шесть ножек 84 имеют равные длины (например, когда верхняя и нижняя платформы 152, 154 параллельны друг другу, как показано), три контактные области 152a, 152b, 152c верхней платформы 152, в общем, выровнены по окружности (например, выровнены вдоль кругового направления 159) с тремя контактными областями 154a, 154b, 154c нижней платформы 154. Это может называться «параллельным положением» инвертированной платформы 150 Стюарта. Таким образом, можно сказать, что в параллельном положении, предполагая, что платформы 152, 154 имеют равные размеры, контактная область 152a, в общем, выровнена под контактной областью 154a, контактная область 152b, в общем, выровнена под контактной областью 154b, и контактная область 152c, в общем, выровнена под контактной областью 154c. Ножка 156, соединенная с контактной областью 152a, продолжается до контактной области 154b, и ножка 158, соединенная с контактной областью 152a, продолжается до контактной области 154c. Ножка 160, соединенная с контактной областью 152b, продолжается до контактной области 154a, и ножка 162, соединенная с контактной областью 152b, продолжается до контактной области 154c. Ножка 164, соединенная с контактной областью 152c, продолжается до контактной области 154a, и ножка 166, соединенная с контактной областью 152c, продолжается до контактной области 154b. Соответственно, в показанном варианте осуществления, каждая из ножек 84 продолжается от исходной контактной области до контактной области противоположной платформы, которая не находится прямо над или под (т.е. в том же самом положении x, y) исходной контактной областью.
[0045] Конфигурация инвертированной платформы 150 Стюарта, описанная выше, уменьшает угол 155 между каждой из ножек 84 и каждой из верхней и нижней платформ 152, 154 по сравнению с традиционными вариантами осуществления, даже когда ножки 84 имеют разные длины (например, во время работы). Уменьшение угла 155 ножек 84 инвертированной платформы 150 Стюарта (например, относительно традиционных вариантов осуществления) может увеличить устойчивость инвертированной платформы 150 Стюарта посредством создания большей восстанавливающей силы в ножках 84. Например, уменьшение угла 155 может увеличить общую жесткость инвертированной платформы 150 Стюарта для уменьшения нежелательных перемещений. Дополнительно, в то время как традиционные модули на основе платформы Стюарта могут включать в себя одну большую платформу для обеспечения устойчивости, уменьшение угла 155, указанное выше, обеспечивает устойчивость с меньшими платформами. Следует отметить, что в некоторых вариантах осуществления платформы 152, 154 могут иметь разные размеры, и что в этих вариантах осуществления контактные области 152a, 152b, и 152c могут все же быть выровнены, вдоль кругового направления 159, с контактными областями 154a, 154b, и 154c, соответственно; однако, контактные области 152a, 152b, и 152c верхней платформы 152, если предположить, что верхняя платформа 152 имеет больший размер, могут не быть расположенными прямо над контактными областями 154a, 154b, 154c нижней платформы 154, а вместо этого может быть расположены радиально наружу от них и выровнены с ними по окружности или кольцеобразно (например, вдоль направления 159).
[0046] Как отмечено выше, расположение, показанное на фиг. 6, позволяет уменьшить угол 155 между любой данной ножкой 84 и соответствующей платформой 152 или 154 по сравнению с традиционными платформами Стюарта. В одном варианте осуществления, когда все ножки 156, 158 160, 162, 164, 166 имеют равные длины, углы 155, образованные между каждой ножкой 84 и платформой 152, 154, составляют 45 градусов или менее. Раскрытое расположение создает компактную конструкцию, которая обеспечивает устойчивое перемещение в соответствии с множественными степенями свободы согласно настоящим вариантам осуществления. Как отмечено выше, в то время как традиционные модули на основе платформы Стюарта могут включать в себя большие платформы для обеспечения устойчивости, уменьшение угла 155, указанное выше, относительно раскрытых вариантов осуществления, обеспечивает устойчивость с меньшими платформами.
[0047] В показанном варианте осуществления инвертированной платформы 150 Стюарта, для обеспечения согласованного движения и распределения сил, ножки 84 могут попеременно быть «внешними ножками» и «внутренними ножками». Другими словами, если начать с контактной области 152а на верхней платформе 152 и перемещаться против часовой стрелки, то ножка 156 («внутренняя ножка») контактной области 152а продолжается по направлению к внутренней стороне ножек 160 и 164, и ножка 158 («внешняя ножка») контактной области 152а продолжается по направлению к внешней стороне ножки 164. Если переместиться затем в контактную область 152с, то ножка 164 («внутренняя ножка») контактной области 152с продолжается между ножками 158 и 162, и ножка 166 («внешняя ножка») контактной области 152с продолжается снаружи ножки 162. Если переместиться затем в контактную область 152b, то ножка 162 («внутренняя ножка») продолжается между ножками 164 и 166, и ножка 160 («внешняя ножка») контактной области 152b продолжается снаружи ножки 156. Конечно, может быть использовано подобное, но обратное расположение, в котором переставлена каждая из внешних и внутренних ножек. В других вариантах осуществления могут быть использованы другие расположения.
[0048] Фиг. 7 показывает вариант осуществления инвертированной платформы 150 Стюарта фиг. 6 с другим положением/ориентацией нижней платформы 152. Как показано на фиг. 7, нижняя платформа 153 перемещена таким образом, что контактная область 154а находится дальше от верхней платформы 154 вдоль направления 53, чем в случае «параллельного положения», описанного в отношении фиг. 6. Для достижения этого положения, ножки 160 и 164 могут быть продолжены посредством лебедок 180 (и их соответствующих двигателей) для опускания контактной области 154а в направлении 53. Подобным образом, лебедки 180 могут быть использованы для втягивания ножек 158 и 162. Если ножки 158 и 162 будут втянуты на достаточную длину, то контактная область 154с может переместиться ближе к верхней платформе вдоль направления 53, чем в случае «параллельного положения», описанного в отношении фиг. 6. Другими словами, ножки 84 могут быть выполнены с возможностью обеспечивать показанное положение и поддерживать устойчивость инвертированной платформы 150 Стюарта. При этом расположении, инвертированная платформа 150 Стюарта может вызывать чувства у пассажиров посредством перемещения транспортного средства для катания. Например, транспортное средство для катания может быть соединено с нижней платформой 154, и расположение, показанное на фиг. 7, может вызывать переход транспортного средства для катания в наклонное или отклоненное положение. Подобные положения могут быть обеспечены относительно других контактных областей, поскольку инвертированная платформа 150 Стюарта включает в себя круговое расположение. Дополнительно, команды на изменение положения могут быть отданы в быстром последовательном порядке для усиления чувств. Более того, команды на изменение положения могут быть отданы для управления или компенсации сил противодействия, прикладываемых к системе транспортным средством для катания, соединенным с инвертированной платформой 150 Стюарта. По существу, пассажиры транспортного средства для катания могут ощущать, что транспортное средство для катания «летит» или «реагирует» на различные силы, без использования кривизны пути для создания некоторых из сил, и устойчивостью системы можно управлять при обстоятельствах, когда движение транспортного средства для катания отклоняется от требуемого движения.
[0049] Фиг. 8 является схематической иллюстрацией варианта осуществления инвертированной платформы 150 Стюарта. Как показано на фиг. 8, положение нижней платформы 154 находится дальше от верхней платформы 152 вдоль направления 53, чем в случае, показанном на фиг. 6. Другими словами, расстояние 171 между платформами 152, 154 является большим на фиг. 8, чем на фиг. 6. Эта конфигурация может быть создана, например, посредством одновременного продолжения всех ножек 156, 158 160, 162, 164, 166. Расстояние 171 может быть изменено даже тогда, когда инвертированная платформа 150 Стюарта не находится в вышеупомянутом параллельном положении. Конечно, в другой рабочей последовательности, платформы 152, 154 могут быть вытянуты вместе посредством втягивания ножек 84. В любой последовательности, новое положение может настраивать высоту транспортного средства для катания (т.е. вдоль направления 53), что может усилить впечатление пассажиров. Например, транспортное средство для катания может быть опущено таким образом, чтобы оно находилось вблизи элемента, находящегося снаружи транспортного средства для катания (например, такого как экспонат или аттракцион, смежный с транспортным средством для катания). Дополнительно, когда транспортное средство для катания опускается, это может вызывать чувства у пассажиров (т.е. чувство «падения») для усиления впечатления от аттракциона для катания.
[0050] Как показано на фиг. 7 и 8, инвертированная платформа 150 Стюарта может порождать несколько разных движений транспортного средства для катания. По существу, признаки пути, используемые для порождения движений транспортного средства для катания, могут быть уменьшены, что может уменьшить размер и/или стоимость системы аттракциона для катания. Как описано выше, инвертированная платформа 150 Стюарта и механизм продолжения (например, механизм 60 продолжения фиг. 2–5) могут работать вместе для имитации чувств, подобных или таких же, как чувства, создаваемые путем, при поддержании устойчивости. Например, путь может больше не включать в себя наклонную возвышенность, поскольку инвертированная платформа 150 Стюарта может обеспечить наклон (и/или вертикальный подъем транспортного средства 54 для катания) вместе с вертикальным движением транспортного средства для катания, вызванным механизмом продолжения (например, механизмом 60 продолжения фиг. 2–5). Это может уменьшить затраты на изготовление пути и системы аттракциона для катания в целом, и может уменьшить площадь занимаемой поверхности пути и системы аттракциона для катания в целом.
[0051] На фиг. 6–8, верхняя платформа 152 и нижняя платформа 154 показаны в виде округлых плит, но в другом варианте осуществления они могут иметь любую пригодную форму. Дополнительно, верхняя платформа 152 и нижняя платформа 154 могут иметь формы, отличающиеся друг от друга. Как отмечено выше, в одном варианте осуществления, верхняя платформа 152 может соединяться с механизмом продолжения (например, механизмом 60 продолжения на фиг. 2–5) или с путем (например, посредством промежуточной тележки, которая скользит вдоль пути), и нижняя платформа 154 может соединяться с транспортным средством для катания. В этом варианте осуществления, транспортное средство для катания может свободно висеть под путем, как показано на фиг. 2 и 4 (т.е. на фигурах, показывающих транспортное средство 54 для катания и путь 52).
[0052] Фиг. 9 показывает другой вариант осуществления платформенного модуля 200. Платформенный модуль 200 может включать в себя верхнюю платформу 202 и нижнюю платформу 204. В этом варианте осуществления, ножки 202, 204, 206, 208, 210, 212 могут быть продолжены и/или втянуты исполнительными механизмами 230. По существу, ножки могут не соединяться с лебедками и могут не включать в себя кабели или канаты, хотя лебедки могут быть использованы в комбинации с исполнительными механизмами 230.
[0053] Для обеспечения более подробного вида одной из ножек 84, фиг. 10 показывает вариант осуществления исполнительного механизма 230, который может быть использован в платформенном модуле 200. Показанный на фигуре исполнительный механизм 230 может включать в себя средний сегмент 232 и два сегмента 234 ножек, соединенные с обоими концами каждого среднего сегмента 232. Сегменты 234 ножек могут быть изготовлены из металла, углеродного волокна, другого пригодного материала или любой их комбинации для обеспечения надежного соединения с исполнительным механизмом 230. Средний сегмент 232 может обеспечивать, чтобы сегменты 234 ножек могли вдвигаться в средний сегмент 232 или выдвигаться из него, для обеспечения работы исполнительного механизма 230 (например, для втягивания или продолжения, соответственно, соответствующей ножки).
[0054] Дополнительные варианты осуществления систем аттракционов для катания, использующих платформенный модуль и/или механизм (механизмы) продолжения, описаны ниже. Например, фиг. 11 является схематической иллюстрацией варианта осуществления системы 250, имеющей кабину 252, расположенную поверх основания 254 и поверх промежуточного платформенного модуля 256 (например, инвертированной платформы Стюарта), причем платформенный модуль 256 соединяется с кабиной 252 и основанием 254. Таким образом, кабина 252 ориентирована относительно пути 254 не так, как показано на фиг. 2. Как описано выше, окна 258 могут быть расположены или размещены на кабине 252 таким образом, чтобы они обеспечивали или затрудняли видимость некоторых признаков изнутри кабины 252. Основание 254 может быть путем или неподвижным основанием, связанным с экспонатом или зрелищем. В некоторых вариантах осуществления, основание 254 может быть открытым путем, по которому может перемещаться кабина 252 и соответствующая инвертированная платформа 256 Стюарта (например, посредством колес). Следует отметить, что кабина 252 может быть заменена элементом зрелища в некоторых вариантах осуществления.
[0055] Фиг. 12 является схематической иллюстрацией варианта осуществления системы 300, в которой кабина 302 системы 300 расположена на одной стороне основания 304 (например, в направлении 51). Здесь, платформенный модуль 306 (например, инвертированная платформа Стюарта) расположен на некотором расстоянии в направлении 51 от основания 304, и, кроме того, на некотором расстоянии в направлении 302 расположена кабина 302, соединенная с платформенным модулем 306. Подобно фиг. 11, окна 308 могут быть расположены на кабине 302 таким образом, чтобы они обеспечивали или затрудняли видимость некоторых признаков изнутри кабины 302. Как описано выше, основание 304 может быть путем или неподвижной конструкцией. Дополнительно, в то время как в показанном варианте осуществления показана кабина 302, кабина 302 может быть заменена элементом зрелища в некоторых вариантах осуществления.
[0056] В другом варианте осуществления, показанном на фиг. 13, система 350 может включать в себя платформенный модуль 352 (например, инвертированную платформу Стюарта), реализованный в представлении. Верхняя платформа 354 платформенного модуля 352 может быть соединена со сценой 356, и нижняя платформа 358 может быть соединена с неподвижным элементом 360 (например, землей или полом под сценой 356). Таким образом, сцена 356 может быть выполнена с возможностью удерживать одного или нескольких человек (или элементов/компонентов зрелища) и может быть выполнена с возможностью перемещаться относительно неподвижного элемента 360. Например, упомянутые один или несколько человек могут исполнять некоторое действие, и платформенный модуль 352 может перемещать сцену 356 для улучшения представления. В системах, представленных на фиг. 11–13, контроллер (например, контроллер 20 фиг. 1) может также контролировать силы, действующие на соответствующие системы аттракционов для катания (например, на каждую из ножек) для обеспечения устойчивости, подобно описанию, приведенному выше со ссылкой по меньшей мере на фиг. 5.
[0057] Фиг. 4 показывает вариант осуществления способа 400 для управления системой аттракциона для катания согласно настоящему раскрытию. Способ 400 включает в себя этап, на котором принимают (блок 402) сигнал (например, посредством контроллера), дающий команду позиционировать платформенный модуль (или его платформу). Например, некоторое перемещение платформенного модуля может потребоваться, чтобы вызвать перемещение (например, крен, наклон, отклонение, перемещение вверх или вниз) транспортного средства для катания, соединенного с платформенным модулем (например, с нижней платформой платформенного модуля). Следует отметить, что платформенный модуль может быть модулем на основе инвертированной платформы Стюарта, и что в некоторых вариантах осуществления система аттракциона для катания может быть сценой или другим зрелищным экспонатом, в котором неподвижное основание заменяет путь.
[0058] Способ 400 также включает в себя этап, на котором продолжают и/или втягивают (блок 404), посредством отдания средством управления команд моторизованным лебедкам или другим исполнительным механизмам, некоторые из ножек платформенного модуля, чтобы вызвать перемещение платформенного модуля (или его платформы) в соответствии с командой, описанной выше в отношении блока 402. Как описано выше, перемещение платформенного модуля может вызвать перемещение транспортного средства для катания или кабины (или сцены, в вариантах осуществления, относящихся к зрелищам или экспонатам) системы, которое может вызвать появление сил противодействия на пути нагружения (например, на удлинительном кабеле) между транспортным средством для катания и путем.
[0059] Способ 400 также включает в себя этап, на котором измеряют, воспринимают или детектируют (блок 406) силы противодействия (или параметры, отражающие силы) в системе аттракциона для катания. Например, как описано выше, датчики крутящего момента, оптические датчики, или другие датчики могут быть использованы для детектирования сил (или параметров, таких как ориентация транспортного средства для катания, отражающая силы), действующих в системе аттракциона для катания. Контроллер может принимать сигналы обратной связи от датчиков и определять, на основе алгоритма компенсации крутящего момента, как следует наилучшим образом управлять силами/нагрузками противодействия, возникающими вследствие перемещения транспортного средства для катания.
[0060] Способ 400 также включает в себя этап, на котором определяют (блок 407) настройки для системы посредством контроллера, который анализирует силы противодействия посредством алгоритма компенсации крутящего момента. Дополнительно, способ 400 включает в себя этап, на котором настраивают (блок 408) ножки платформенного модуля и/или удлинительные кабели. Как описано выше, контроллер может определять требуемые настройки и давать команды двигателям или другим исполнительным механизмам для настройки натяжения ножек и/или удлинительных кабелей (например, посредством продолжения или втягивания ножек и/или удлинительных кабелей), что предотвращает провисание ножек и/или удлинительных кабелей.
[0061] Системы и способы, описанные выше, выполнены с возможностью обеспечивать управление противодействующими нагрузками, возникающими в системе аттракциона для катания вследствие перемещения транспортного средства для катания, причем это перемещение вызвано механизмом продолжения и/или платформенным модулем (например, инвертированной платформой Стюарта). Механизм продолжения и/или платформенный модуль вызывают перемещение транспортного средства без использования криволинейного пути, причем криволинейный путь иначе мог бы занимать большее пространство и мог бы увеличить площадь занимаемой поверхности системы аттракциона для катания. Управление с помощью обратной связи позволяет системе контролировать силы противодействия, вызываемые движением транспортного средства для катания, и настраивать систему таким образом, чтобы она поддерживала устойчивость системы аттракциона для катания.
[0062] В то время как здесь были показаны и описаны только некоторые признаки настоящего раскрытия, многие модификации и изменения будут приходить на ум специалистам в данной области техники. Поэтому следует понимать, что предполагается, что прилагаемая формула изобретения включает в себя все такие модификации и изменения, попадающие в пределы истинной сущности настоящего раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АТТРАКЦИОНА ДЛЯ КАТАНИЯ С ПОДЪЕМНИКОМ С МНОЖЕСТВЕННЫМИ СТЕПЕНЯМИ СВОБОДЫ | 2019 |
|
RU2764236C1 |
| ПАССАЖИРСКОЕ КРЕПЛЕНИЕ ДЛЯ РАЗВЛЕКАТЕЛЬНОГО АТТРАКЦИОНА ДЛЯ КАТАНИЯ | 2018 |
|
RU2756725C2 |
| СИСТЕМА ПРИВОДИМЫХ В ДЕЙСТВИЕ ПОДВИЖНЫХ ПЛАТФОРМ | 2015 |
|
RU2687812C2 |
| СИСТЕМА АТТРАКЦИОНА ДЛЯ КАТАНИЯ (ВАРИАНТЫ) | 2020 |
|
RU2768137C1 |
| СИСТЕМА АТТРАКЦИОНА (ВАРИАНТЫ) И СПОСОБ ЕЁ ЭКСПЛУАТАЦИИ | 2019 |
|
RU2768318C1 |
| СИСТЕМА ПАРКА РАЗВЛЕЧЕНИЙ (ВАРИАНТЫ) И СПОСОБ ЕЁ ЭКСПЛУАТАЦИИ | 2020 |
|
RU2768124C1 |
| СИСТЕМЫ И СПОСОБЫ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ С ДОПОЛНЕННОЙ И ВИРТУАЛЬНОЙ РЕАЛЬНОСТЬЮ | 2015 |
|
RU2668532C2 |
| ПЕРЕМЕЩАЮЩАЯСЯ ДЕМОНСТРАЦИОННАЯ ДВЕРЬ | 2015 |
|
RU2633222C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ СИНХРОНИЗАЦИИ УПРАВЛЕНИЯ АТТРАКЦИОНОМ ДЛЯ КАТАНИЯ | 2017 |
|
RU2751678C2 |
| ПРИВОДНАЯ СИСТЕМА ДЛЯ ОБЕСПЕЧЕНИЯ ВЕРТИКАЛЬНОГО ДВИЖЕНИЯ ДЛЯ СИСТЕМЫ АТТРАКЦИОНОВ ДЛЯ КАТАНИЯ | 2020 |
|
RU2765528C1 |
Настоящее изобретение относится, в общем, к области парков развлечений. Система аттракциона для катания включает в себя основание, транспортное средство для катания, платформенный модуль, расположенный между основанием и транспортным средством для катания, и механизм продолжения, соединенный с платформенным модулем и расположенный между основанием и транспортным средством для катания. Платформенный модуль включает в себя первую платформу, вторую платформу и шесть ножек, продолжающихся между первой платформой и второй платформой, и платформенный модуль выполнен с возможностью приводить в действие каждую из шести ножек с тем, чтобы таким образом перемещать первую платформу относительно второй платформы в разных конфигурациях на основе того, какие из шести ножек приведены в действие. Механизм продолжения выполнен с возможностью продолжаться и укорачиваться с тем, чтобы перемещать транспортное средство для катания от основания системы аттракциона для катания и по направлению к нему, соответственно. Технический результат - улучшенное приведение в действие транспортного средства для катания. 2 н. и 13 з.п. ф-лы, 14 ил.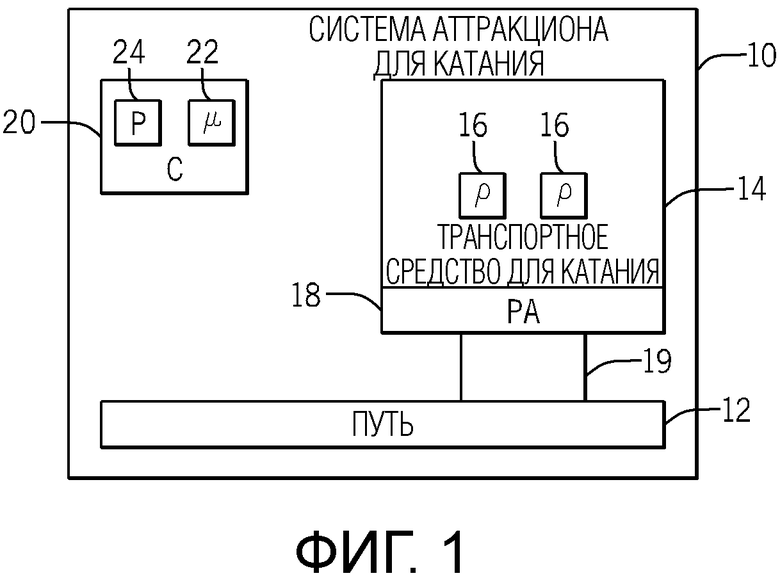
1. Система аттракциона для катания, содержащая:
основание;
транспортное средство для катания;
платформенный модуль, имеющий первую платформу, вторую платформу и шесть ножек, продолжающихся между первой платформой и второй платформой, причем платформенный модуль расположен между основанием и транспортным средством для катания, и причем платформенный модуль выполнен с возможностью приводить в действие каждую из шести ножек с тем, чтобы перемещать первую платформу относительно второй платформы в разных конфигурациях на основе того, какие из шести ножек приведены в действие;
механизм продолжения, расположенный между основанием и транспортным средством для катания, соединенный с платформенным модулем и выполненный с возможностью продолжаться и укорачиваться с тем, чтобы перемещать транспортное средство для катания от основания системы аттракциона для катания и по направлению к нему, соответственно, причем механизм продолжения содержит множество кабелей; и
контроллер, коммуникационно связанный с множеством двигателей, выполненных с возможностью селективно поднимать лебедками множество кабелей, причем контроллер выполнен с возможностью:
контролировать силы, действующие в системе аттракциона для катания, вызванные приведением в действие по меньшей мере одной ножки из шести ножек; и
модулировать выходные крутящие моменты множества двигателей на основе сил, контролируемых контроллером.
2. Система аттракциона для катания по п. 1, в которой платформенный модуль расположен между основанием и механизмом продолжения.
3. Система аттракциона для катания по п. 1, в которой платформенный модуль расположен между транспортным средством для катания и механизмом продолжения.
4. Система аттракциона для катания по п. 1, в которой первая платформа содержит первое крепежное положение, с которым соединена первая пара ножек из шести ножек, второе крепежное положение, с которым соединена вторая пара ножек из шести ножек, и третье крепежное положение, с которым соединена третья пара ножек из шести ножек;
в которой вторая платформа содержит четвертое крепежное положение, с которым соединена первая ножка второй пары ножек и первая ножка третьей пары ножек, пятое крепежное положение, с которым соединена первая ножка первой пары ножек и вторая ножка третьей пары ножек, и шестое крепежное положение, с которым соединена вторая ножка первой пары ножек и вторая ножка второй пары ножек; и
в которой первое крепежное положение выровнено с четвертым крепежным положением, когда шесть ножек имеют равные длины, второе крепежное положение выровнено с пятым крепежным положением, когда шесть ножек имеют равные длины, и третье крепежное положение выровнено с шестым крепежным положением, когда шесть ножек имеют равные длины.
5. Система аттракциона для катания по п. 1, в которой каждая ножка из шести ножек образует первый угол с первой плоскостью первой платформы, меньший или равный 45 градусам, и в которой каждая ножка из шести ножек образует второй угол со второй плоскостью второй платформы, меньший или равный 45 градусам.
6. Система аттракциона для катания по п. 1, содержащая множество лебедок, выполненных с возможностью продолжать шесть ножек, втягивать шесть ножек, или осуществлять и то, и другое.
7. Система аттракциона для катания по п. 1, в которой основание содержит путь, вдоль которого транспортное средство для катания выполнено с возможностью перемещаться, или неподвижное основание, на котором расположено транспортное средство для катания.
8. Система аттракциона для катания по п. 1, в которой транспортное средство для катания подвешено ниже основания или заделано одним концом в основание.
9. Система аттракциона для катания по п. 1, в которой транспортное средство для катания расположено выше основания.
10. Система аттракциона для катания, содержащая платформенный модуль, причем платформенный модуль содержит:
первую платформу, соединенную с транспортным средством для катания, вторую платформу и шесть ножек, продолжающихся между первой платформой и второй платформой;
причем первая платформа содержит первое крепежное положение, с которым соединены первая ножка и вторая ножка из шести ножек, второе крепежное положение, с которым соединены третья ножка и четвертая ножка из шести ножек, и третье крепежное положение, с которым соединены пятая ножка и шестая ножка из шести ножек;
причем вторая платформа содержит четвертое крепежное положение, с которым соединены третья ножка и шестая ножка, пятое крепежное положение, с которым соединены вторая ножка и пятая ножка, и шестое крепежное положение, с которым соединены первая ножка и четвертая ножка; и
причем первое крепежное положение выровнено над четвертым крепежным положением, когда шесть ножек имеют равные длины, второе крепежное положение выровнено над пятым крепежным положением, когда шесть ножек имеют равные длины, и третье крепежное положение выровнено над шестым крепежным положением, когда шесть ножек имеют равные длины.
11. Система аттракциона для катания по п. 10, в которой каждая ножка из шести ножек образует первый угол с первой плоскостью первой платформы, меньший или равный 45 градусам, и в которой каждая ножка из шести ножек образует второй угол со второй плоскостью второй платформы, меньший или равный 45 градусам.
12. Система аттракциона для катания по п. 10, содержащая шесть исполнительных механизмов, соответствующих шести ножкам и выполненных с возможностью быть управляемыми с тем, чтобы изменять длины шести ножек.
13. Система аттракциона для катания по п. 10, содержащая:
основание, с которым прямо или непрямо соединен платформенный модуль; и
механизм продолжения, выполненный с возможностью изменять расстояние до транспортного средства для катания от основания.
14. Система аттракциона для катания по п. 10, содержащая множество лебедок, расположенных вблизи первого крепежного положения, второго крепежного положения и третьего крепежного положения первой платформы, причем множество лебедок выполнено с возможностью продолжать шесть ножек, втягивать шесть ножек, или осуществлять и то, и другое.
15. Система аттракциона для катания по п. 10, содержащая:
механизм продолжения, имеющий множество кабелей, продолжающихся между платформенным модулем и опорой системы аттракциона для катания;
множество двигателей, выполненных с возможностью селективно поднимать лебедками множество кабелей; и
контроллер, коммуникационно связанный с множеством двигателей, причем контроллер выполнен с возможностью:
контролировать силы, действующие в системе аттракциона для катания, вызванные приведением в действие по меньшей мере одной ножки из шести ножек; и
модулировать выходные крутящие моменты множества двигателей на основе сил, контролируемых контроллером.
| CN 204833773 U, 2015.12.02 | |||
| JP 2006259363 A, 2006.09.28 | |||
| Способ получения прочного металлургического кокса из малосернистых и малозольных газовых некоксующихся углей | 1958 |
|
SU115230A1 |
| АТТРАКЦИОН | 1999 |
|
RU2163498C1 |

