Изобретение относится к радиолокационным системам (РЛС) с импульсным фазоманипулированным зондирующим сигналом, используемым на подвижных носителях, преимущественно на беспилотных летательных аппаратах (БПЛА), и предназначенным для обнаружения и сопровождения моноимпульсным способом сигналов от объектов назначения (целей).
В моноимпульсных радиолокаторах, предназначенных для обнаружения и сопровождения целей, принимаемые высокочастотные сигналы после суммарно-разностного преобразования подаются на смесители суммарного и разностного каналов и затем на усилители промежуточной частоты, с выходов которых сигналы поступают на амплитудный детектор в суммарном канале и на фазовый детектор в разностном канале. В результате фазового детектирования образуется сигнал углового рассогласования, используемый для углового сопровождения [1, с. 22, рис. 1.9], [2, с. 20, рис. 15]. Сигнал суммарного канала поступает на временной дискриминатор, в котором образуется сигнал для сопровождения по дальности.
Недостатком этих устройств является низкая эффективность, связанная с недостаточной помехозащищенностью по отношению к активным и пассивным помехам. Активные помехи приводят к обнаружению ложных объектов и маскированию объектов назначения истинных. Пассивные помехи в виде отражений от местных предметов также маскируют полезный сигнал ввиду невозможности реализовать высокое разрешение по углу на больших дальностях при ограниченных размерах радиолокаторов, устанавливаемых на подвижных носителях, которые вследствие этого имеют широкую диаграмму направленности антенны. Указанные факторы снижают вероятность правильного выбора объекта назначения и соответственную эффективность устройств.
Известно устройство [3], которое использует для работы сложные фазоманипулированные (далее по тексту ФМ) сигналы и содержит последовательно соединенные генератор кодов, фазовый манипулятор, усилитель мощности, антенный переключатель и антенну, последовательно включенные суммарно-разностный преобразователь, усилитель высокой частоты, смеситель, усилитель промежуточной частоты, а также возбудитель, импульсный модулятор, привод антенны, блоки фазовых детекторов суммарного и разностного сигналов с амплитудными квантователями, цифровые согласованные фильтры комплексного сигнала, содержащего две квадратуры, блок вычисления модуля, блок обнаружения и вычисления координат, дискриминатор дальности, преобразователь кода во временной интервал, частотный дискриминатор, дискриминатор угла, генераторы доплеровских частот, фильтры доплеровских частот, блок захвата объекта сопровождения, сумматоры, вычитатели, вентили и регистры.
Благодаря применению фазоманипулированных сигналов и одновременной работе трех контуров сопровождения объекта: по дальности, по доплеровской частоте и по углу существенно повышена разрешающая способность РЛС.
Недостатком РЛС при ее установке на БПЛА является невысокая эффективность вследствие того, что при увеличении скорости носителя, в частности при установке РЛС на беспилотном летательном аппарате, возникают существенные искажения фазы отраженных сигналов, которые при большой длительности зондирующего сигнала вызывают трудности сжатия в цифровых согласованных фильтрах и снижают вероятность обнаружения и правильного выбора объекта назначения, прямо влияющего на эффективность РЛС.
Кроме того, любая неисправность в РЛС может привести к тому, что БПЛА не достигнет объекта назначения и будет утерян. Это требует увеличенного расхода образцов БПЛА и также снижает эффективность РЛС.
Известна РЛС [4], которая наиболее близка по технической сущности к предлагаемому устройству и принята в качестве прототипа предлагаемой системы.
Для повышения надежности в состав РЛС по прототипу введен блок предстартовой подготовки, выполняющий комплексную проверку аппаратуры и обеспечивающий старт БПЛА только в случае ее исправности.
РЛС по прототипу содержит синхронизатор, возбудитель, генератор кода, амплитудный модулятор, датчик скорости, индикатор отмены пуска, а также следующие блоки:
- блок сверхвысокочастотного (СВЧ) приемопередатчика, включающий антенну, привод антенны, датчик углового положения антенны, суммарно-разностный преобразователь, антенный переключатель (циркулятор), усилитель высокой частоты, фазовый манипулятор, направленный ответвитель, усилитель мощности и коммутатор питания усилителя мощности с соответствующими связями;
- блок предстартовой подготовки, включающий датчик контрольного угла, датчик контрольной скорости, датчик начальной дальности, задающий генератор изменения дальности, триггер пуска, триггер отмены пуска, два коммутатора контрольных и штатных сигналов, генератор одиночного импульса, управляемый элемент задержки, блок сравнения кодов угла, счетчик дальности, элемент И, элемент задержки, и инвертор с соответствующими связями;
- блок обработки сигналов, захвата и сопровождения объекта назначения, включающий для суммарного и разностного каналов смесители с полосовыми фильтрами, усилители промежуточной частоты, квадратурные фазовые детекторы, цифровые согласованные фильтры, доплеровские компенсаторы, а также три дискриминатора (по дальности, по частоте и по углу) объединитель квадратурных каналов, генераторы импульсов, элементы задержки, блок вентилей, преобразователь код - временной интервал с соответствующими связями;
- блок обнаружения и выбора объекта назначения, включающий счетчик дальности, фильтры доплеровской частоты, генераторы доплеровской частоты, кодовые шины, дешифраторы конечного кода, блок сравнения, регистр частоты, счетчик, коммутатор и триггер.
Благодаря контролю РЛС блоком предстартовой подготовки перед стартом, существенно повышена ее надежность во время полета.
Недостатком РЛС является невысокая эффективность, обусловленная тем, что при выборе объекта назначения используется единственный критерий - мощность отраженного сигнала, что при использовании современных технологий строительства объектов назначения (например, стэлс) не всегда соответствует важности самого объекта, а также может легко имитироваться с помощью уголковых отражателей.
Техническим результатом изобретения является повышение эффективности РЛС при установке на БПЛА.
Для достижения заявленного технического результата перед включением РЛС в активный режим с излучением мощного зондирующего сигнала и сканированием лучом антенны области возможного положения объектов назначения предлагается для их обнаружения выполнять предварительное сканирование этой области в пассивном скрытном режиме, предусматривающем только обнаружение радиосигналов приемным трактом в расширенном частотном диапазоне без излучения собственного зондирующего сигнала, а при выборе объекта назначения учитывать не только мощность отраженного им эхо-сигнала, но еще и факт обнаружения посторонних радиосигналов с того же направления по азимуту.
Сущность изобретения заключается в том, что в моноимпульсную радиолокационную систему, содержащую возбудитель, синхронизатор, на первом выходе которого формируются пусковые импульсы с частотой повторения интервалов зондирования, а на втором - синхронизирующие импульсы с частотой дискретизации обрабатываемых сигналов, генератор кода и амплитудный модулятор, входы которых подключены к первому выходу синхронизатора, блок сверхвысокочастотного (СВЧ) приемопередатчика, блок обработки сигналов, захвата и сопровождения (ОСЗС), блок обнаружения и выбора объекта назначения и блок предстартовой подготовки, первый вход которого соединен с выходом датчика сигнала предстартовой подготовки, а четвертый вход и четвертый выход соединены соответственно с выходом датчика скорости и входом индикатора отмены пуска, дополнительно введены блок обработки сигналов пассивного радиоканала (ПРК), блок коррекции приоритетов, блок управления сканированием антенны, коммутатор кодов управления приводом антенны, а также блок вычитания, элемент И-ИЛИ и элемент ИЛИ, выход которого соединен с первым, пусковым, входом блока управления сканированием антенны, первый выход которого соединен со вторым входом коммутатора кодов управления приводом антенны, третий выход соединен с четвертым входом блока обработки сигналов ПРК, четвертый выход соединен со вторым входом элемента И-ИЛИ, а второй выход, на котором формируется сигнал окончания сканирования, соединен со вторым входом блока обработки сигналов ПРК и с третьим входом элемента ИЛИ, первый вход которого подключен к выходу датчика сигнала предстартовой подготовки, а второй вход, соединенный с третьим входом блока обработки сигналов ПРК, подключен к пятому выходу блока предстартовой подготовки, выходы возбудителя, на которых формируются сигнал гетеродинной частоты и опорный сигнал промежуточной частоты, соединены соответственно со вторым и третьим входами блока ОСЗС, а выход сигнала несущей частоты соединен со вторым входом блока СВЧ приемопередатчика, первый вход которого соединен со вторым выходом блока предстартовой подготовки, на котором формируется значение кода фазовой манипуляции, третий вход - с выходом амплитудного модулятора, а четвертый вход - с выходом коммутатора кодов управления приводом антенны, первый вход которого подключен к выходу блока вычитания, а управляющий вход, соединенный с восьмым входом, сигнала захвата, блока ОСЗС, подключен к выходу элемента И-ИЛИ, первый выход, сигналов суммарного канала, блока СВЧ приемопередатчика соединен с пятым входом блока ОСЗС и с входом широкополосного детектора радиоимпульсов, выход которого подключен в пятому входу блока обработки сигналов ПРК, второй выход, сигналов разностного канала, блока СВЧ приемопередатчика соединен с шестым входом блока ОСЗС, а третий выход, сигналов текущего углового положения антенны, соединен с третьим входом блока обнаружения и выбора объекта назначения, с шестым входом блока обработки сигналов ПРК и с третьим входом блока предстартовой подготовки, второй вход которого соединен с выходом генератора кода, первый выход блока предстартовой подготовки, на котором формируется значение скорости, соединен с первым входом блока ОСЗС, а третий выход соединен с первыми входами блока обработки сигналов ПРК и элемента И-ИЛИ, третий вход которого подключен к первому выходу блока обработки сигналов ПРК, второй выход блока обработки сигналов ПРК, на котором формируется сигнал отключения питания усилителя мощности, соединен с пятым входом блока СВЧ приемопередатчика, а его третий выход и восьмой вход соединены соответственно с первым входом и вторым выходом блока коррекции приоритетов, второй вход и первый выход которого соединены соответственно с третьим выходом и четвертым входом блока обнаружения и выбора объекта назначения, первый выход которого соединен с первым входом блока вычитания, второй вход которого подключен ко второму выходу блока ОСЗС, четвертый вход, кода фазовой манипуляции, которого соединен с выходом генератора кода, а первый выход и седьмой вход соединены соответственно со вторым входом и вторым выходом блока обнаружения и выбора объекта назначения, при этом к первому выходу синхронизатора подключены второй вход блока управления сканированием антенны, первый вход блока обнаружения и выбора объекта назначения и девятый вход блока ОСЗС, а ко второму выходу синхронизатора подключены седьмой вход блока обработки сигналов ПРК, пятый вход блока обнаружения и выбора объекта назначения и десятый вход блока ОСЗС.
Сущность изобретения поясняется дальнейшим описанием и чертежами, на которых обозначены:
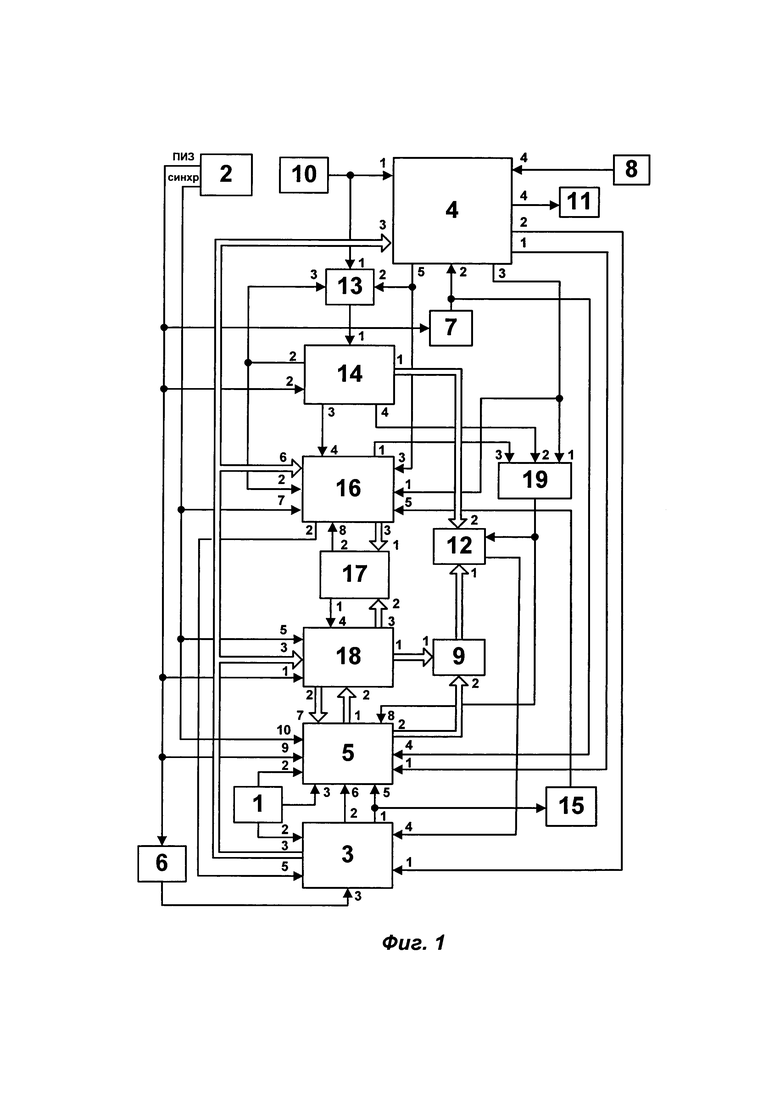
фиг. 1 - структурная схема моноимпульсной РЛС;
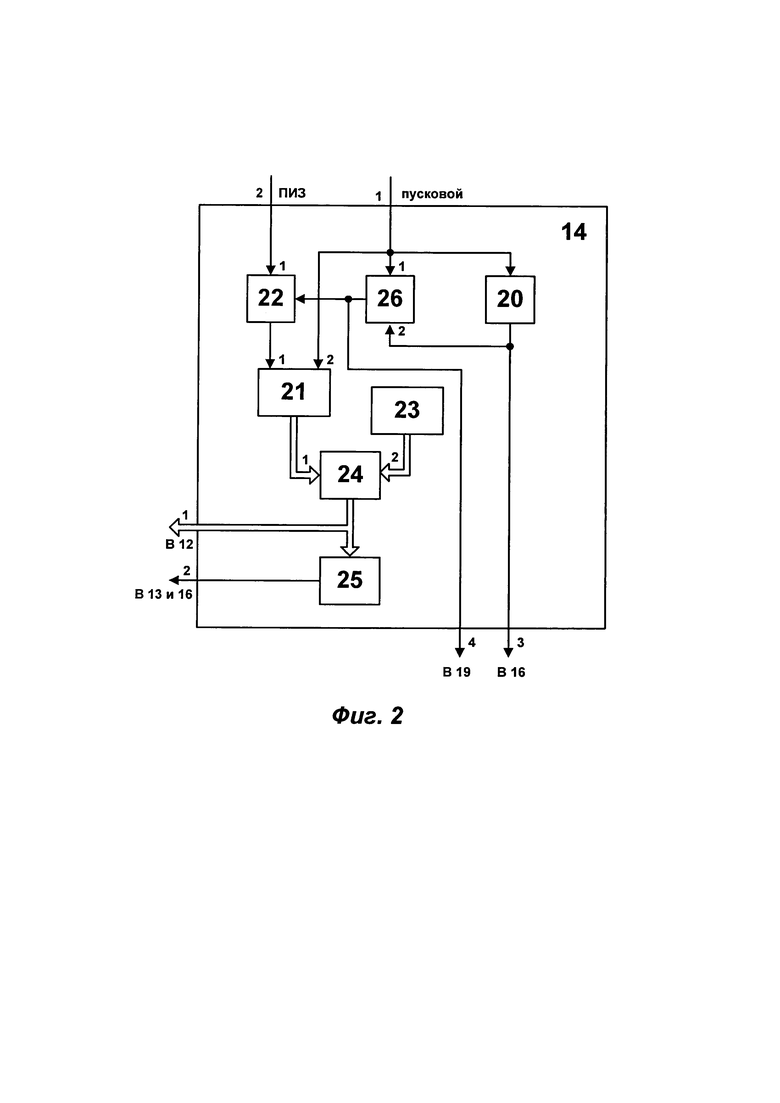
фиг. 2 - структурная схема блока управления сканированием антенны;
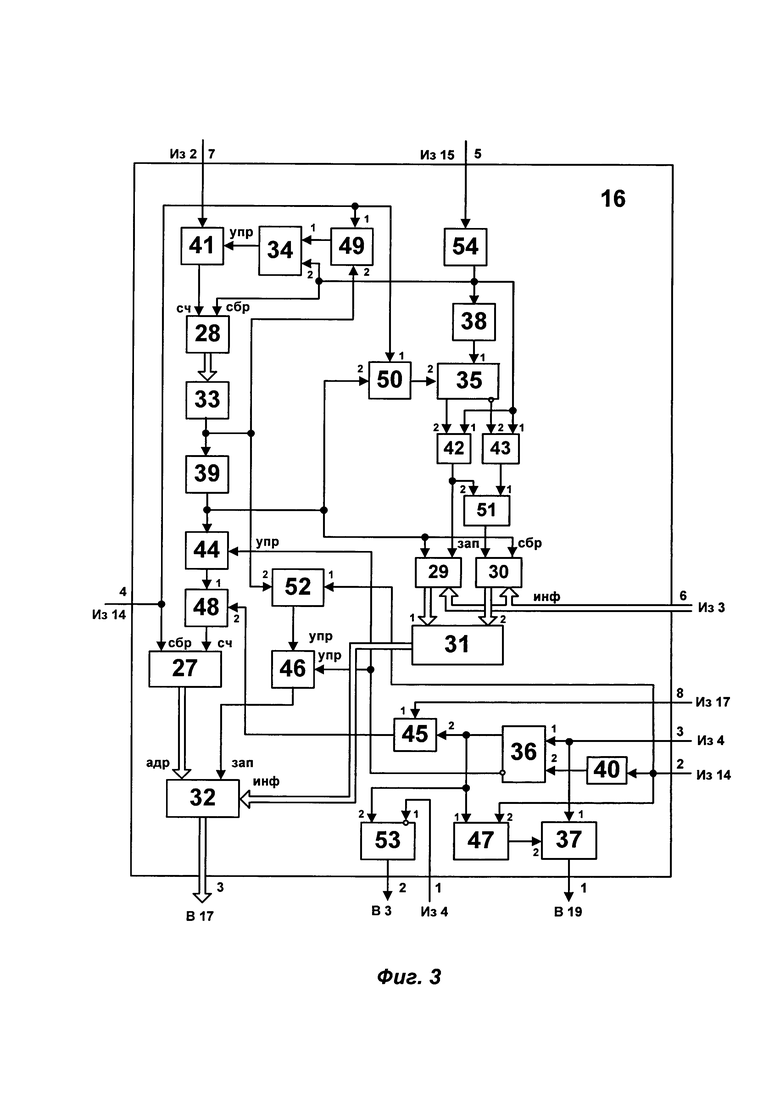
фиг. 3-структурная схема блока обработки сигналов пассивного радиоканала;
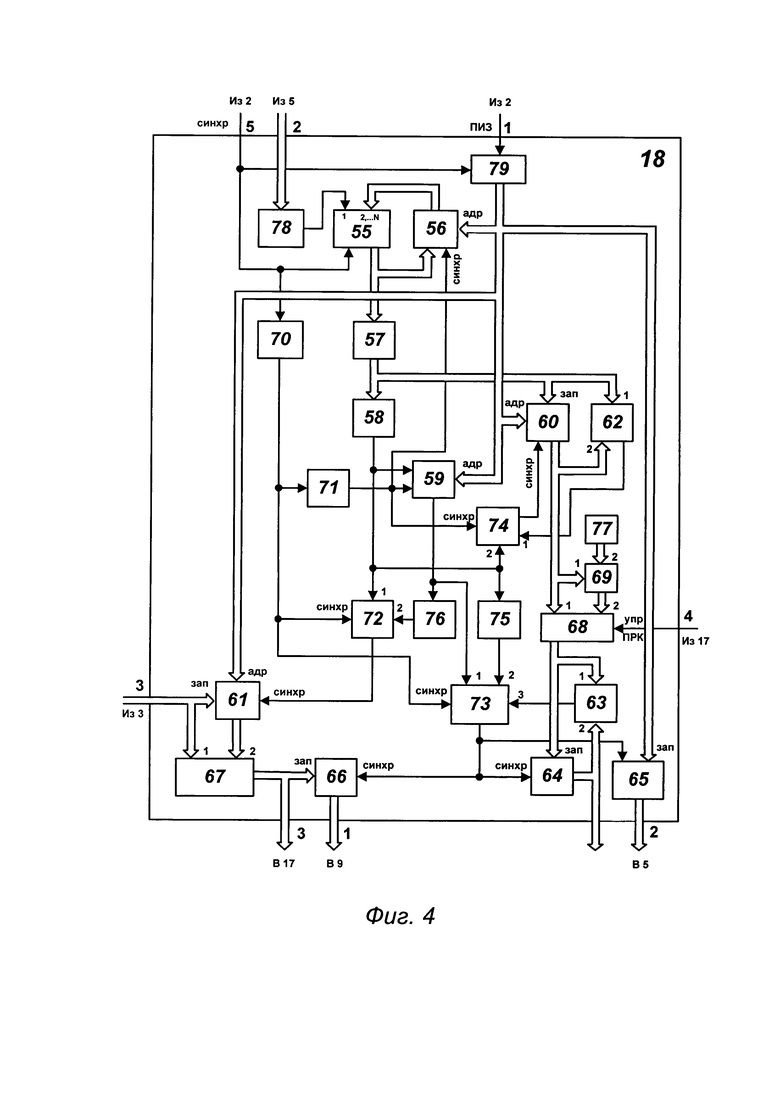
фиг. 4 - структурная схема блока обнаружения и выбора объекта назначения;
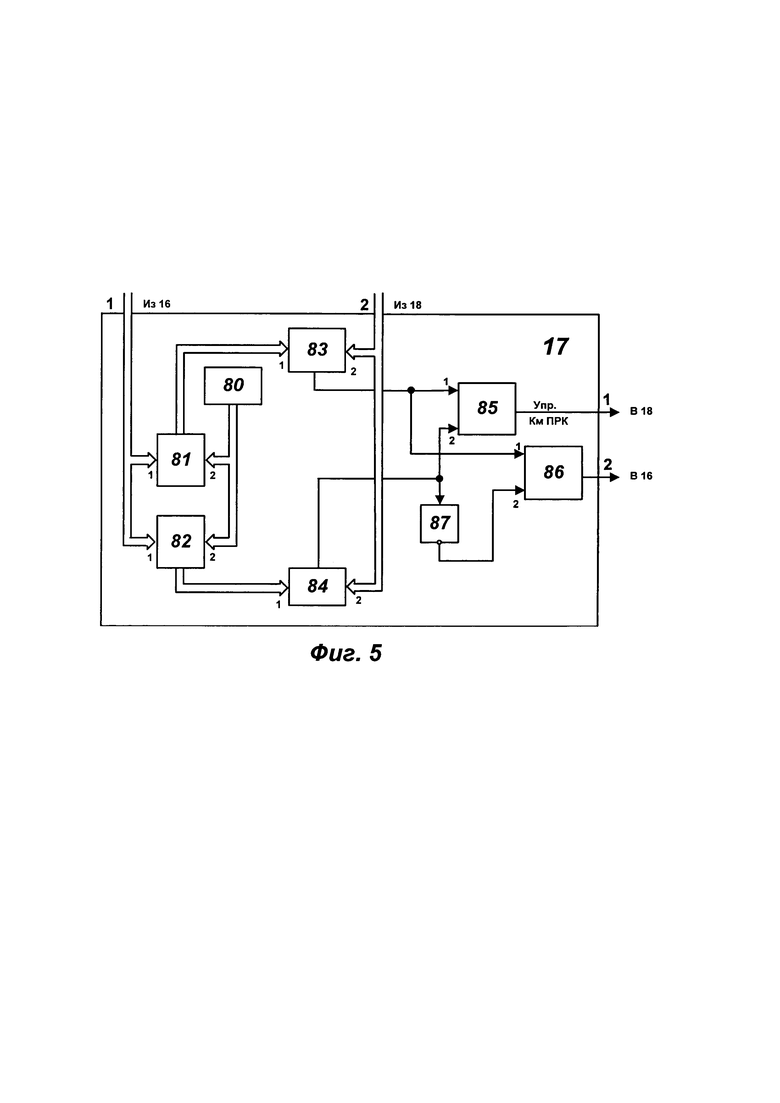
фиг. 5 - структурная схема блока коррекции приоритетов;
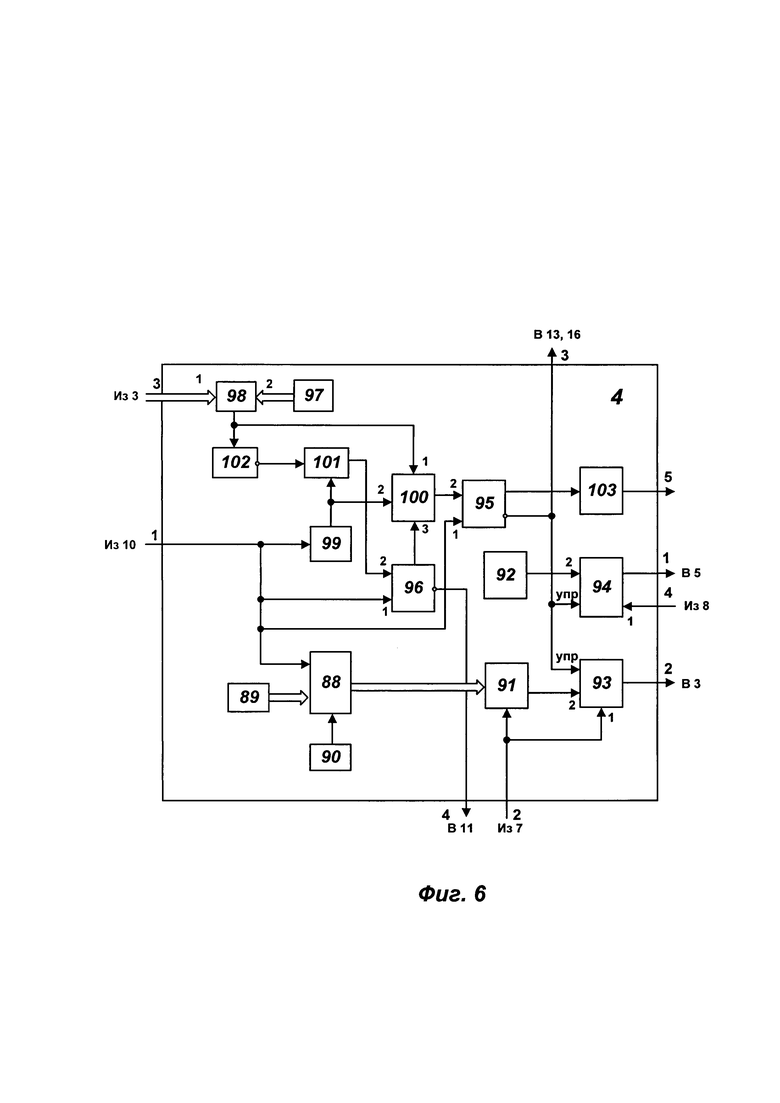
фиг. 6 - структурная схема блока предстартовой подготовки.
На фиг. 1 структурной схемы моноимпульсной РЛС приняты следующие обозначения:
1 - возбудитель;
2 - синхронизатор;
3 - блок сверхвысоко частотного (СВЧ) приемопередатчика, выполненный по известной схеме по патенту №2309430 (прототип), включающий на фиг. 1 антенну, суммарно-разностный преобразователь, антенный переключатель или циркулятор, фазовый манипулятор, усилитель мощности, усилитель высокой частоты, коммутатор питания, направленный ответвитель, привод антенны и датчик углового положения антенны с соответствующими связями;
4 - блок предстартовой подготовки (БПП), структурная схема которого приведена на фиг. 6;
5 - блок обработки сигналов, захвата на сопровождение и сопровождения объекта назначения (далее по тексту - блок обработки сигналов, захвата и сопровождения (ОСЗС), схема реализации которого известна из описания к патенту №2309430 (прототип), и включает на фиг. 1 следующие блоки: смеситель сигналов суммарного и разностного каналов с сигналом гетеродина, с полосовой фильтрацией смешанных сигналов, усилитель промежуточной частоты сигналов суммарного и разностного каналов, фазовые квадратурные детекторы суммарного и разностного каналов, цифровые согласованные фильтры суммарного и разностного каналов, доплеровские компенсаторы, блок объединения квадратур, дискриминаторы сигнала по дальности, частоте, и по углу, фильтр доплеровской частоты, сумматор сигналов, преобразователь кода во временной интервал, генераторы доплеровских частот, сумматоры и блок вычитания сигналов, кодовая шина, блок вентилей, блок захвата сигнала, регистр и элементы задержки с соответствующими связями;
6 - амплитудный модулятор,
7 - генератор кода,
8 - датчик скорости,
9 - блок вычитания,
10 - датчик сигнала предстартовой подготовки в виде одиночного импульса,
11 - индикатор отмены пуска,
12 - коммутатор кодов управления приводом антенны,
13 - элемент ИЛИ,
14 - блок управления сканированием антенны (БУС);
15 - широкополосный детектор радиоимпульсов;
16 - блок обработки сигналов пассивного радиоканала (ПРК);
17 - блок коррекции приоритетов;
18 - блок обнаружения и выбора объекта назначения (БОВО), структурная схема которого приведена на фиг. 4;
19 - элемент И-ИЛИ, на три входа (Bx1, Вх2, Вх3). реализующий логическую функцию: Вых = Вх3 или Вых = Bx1 и Вх2.
Согласно структурной схеме фиг. 1 выходы сигнала гетеродинной частоты и опорного сигнала промежуточной частоты возбудителя 1 соединены соответственно со вторым и третьим входами блока 5 обработки сигналов, захвата и сопровождения, а выход сигнала несущей частоты соединен со вторым входом блока 3 СВЧ приемопередатчика, первый вход которого соединен со вторым выходом (кода ФМ) блока 4 предстартовой подготовки, третий вход - с выходом амплитудного модулятора 6, а четвертый, - с выходом коммутатора 12 кодов управления приводом антенны.
Первый и второй входы коммутатора 12 соединены соответственно с выходом блока 9 вычитания сигналов и с первым выходом блока 14 управления сканированием антенны, а управляющий вход коммутатора 12 и восьмой вход (сигнала захвата) блока 5 ОСЗС-подключены к выходу элемента И-ИЛИ 19.
Первый выход (сигналов суммарного канала) блока 3 СВЧПП соединен с пятым входом блока 5 ОСЗС и с входом широкополосного детектора 15 радиоимпульсов, выход которого подключен в пятому входу блока 16 обработки сигналов пассивного радиоканала. Второй выход (сигналов разностного канала) блока 3 СВЧ приемопередатчика соединен с шестым входом блока 5 ОСЗС, а третий выход (сигналов текущего углового положения антенны) соединен с третьим входом блока 18 обнаружения и выбора объекта назначения, с шестым входом блока 16 обработки сигналов пассивного радиоканала и с третьим входом блока 4 предстартовой подготовки, первый вход которого подключен к выходу датчика 10 сигнала предстартовой подготовки (в виде одиночного импульса), второй вход соединен с выходом генератора 7 кода, а четвертый - с выходом датчика 8 скорости.
Первый выход (сигнала скорости) блока 4 предстартовой подготовки соединен с первым входом блока 5 ОСЗС, третий выход соединен с первыми входами блока 16 обработки сигналов пассивного радиоканала и элемента И-ИЛИ 19, четвертый выход подключен к входу индикатора 11 отмены пуска, а пятый выход соединен с третьим входом блока 16 обработки сигналов ПРК и со вторым входом элемента ИЛИ 13, первый вход которого подключен к выходу датчика 10 сигнала предстартовой подготовки, а третий вход, соединенный со вторым входом блока 16 обработки сигналов ПРК, подключен ко второму выходу блока 14 управления сканированием антенны, первый вход которого соединен с выходом элемента ИЛИ 13, третий выход соединен с четвертым входом блока 16 обработки сигналов ПРК, а четвертый выход соединен со вторым входом элемента И-ИЛИ 19, третий вход которого подключен к первому выходу блока 16 обработки сигналов ПРК. Второй выход (сигнала отключения питания усилителя мощности) блока 16 обработки сигналов ПРК соединен с пятым входом блока 3 СВЧПП, а третий выход и восьмой вход блока 16 соединены соответственно с первым входом и вторым выходом блока 17 коррекции приоритетов, второй вход и первый выход которого соединены соответственно с третьим выходом и четвертым входом блока 18 обнаружения и выбора объекта назначения.
Первый выход блока 18 обнаружения и выбора объекта назначения соединен с первый входом блока 9 вычитания, второй вход которого подключен ко второму выходу блока 5 ОСЗС, четвертый вход (кода фазовой манипуляции) которого соединен с выходом генератора 7 кода, а первый выход и седьмой вход соединены соответственно со вторым входом и вторым выходом блока 18 обнаружения и выбора объекта назначения.
К первому выходу синхронизатора 2, на котором формируются запускающие (пусковые) импульсы ПИЗ с частотой повторения зондирующих сигналов, подключены вход генератора 7 кодов, второй вход блока 14 управления сканированием антенны, первый вход блока 18 обнаружения и выбора объекта назначения, девятый вход блока 5 ОСЗС и вход амплитудного модулятора 6. Ко второму выходу синхронизатора 2, на котором формируются импульсная последовательность с частотой дискретизации принимаемых сигналов, подключены седьмой вход блока 16 обработки сигналов ПРК, пятый вход блока 18 обнаружения и выбора объекта назначения и десятый вход блока 5 ОСЗС.
Блок 14 управления сканированием антенны выполнен по схеме фиг. 2, на которой обозначены:
20 - элемент задержки,
21 - счетчик импульсов,
22 - вентиль,
23 - датчик начального угла,
24 - сумматор,
25 - дешифратор конечного угла,
26 - статический триггер.
Согласно фиг. 2 к первому (пусковому) входу блока 14 управления сканированием антенны подключены первый вход статического триггера 26, второй (обнуляющий) вход счетчика 21 импульсов и вход элемента 20 задержки, выход которого, образующий третий выход блока 14, соединен также со вторым входом статического триггера 26, выход которого образует четвертый выход блока 14. Ко второму входу (пусковых импульсов интервала зондирования) блока 14 подключен первый вход вентиля 22, второй (управляющий) вход которого соединен с выходом статического триггера 26, а выход подключен к первому (счетному) входу счетчика 21 импульсов, выход которого соединен с первым входом сумматора 24. Второй вход сумматора 24 соединен с выходом датчика 23 начального угла, а выход сумматора 24, образующий первый выход блока 14, соединен также с входом дешифратора 25 конечного угла, выход которого образует второй выход (сигнала окончания сканирования) блока 14 управления сканированием антенны.
Блок 16 обработки сигналов пассивного радиоканала выполнен по схеме фиг. 3, на которой обозначены:
27 - счетчик источников радиоимпульсов,
28 - счетчик временных интервалов между радиоимпульсами,
29, 30 - регистры начального и конечного углов пачки радиоимпульсов, соответственно,
31 - формирователь полусуммы углов,
32 - ОЗУ углов источников радиоимпульсов,
33 - дешифратор конца допустимого интервала между радиоимпульсами,
34-36 - статические триггеры,
37 - статический триггер, самоустанавливающийся в нулевое состояние при включении питания;
38-40 - элементы задержки,
41-47 - вентили,
48-52 - элементы ИЛИ,
53 - элемент И с запрещающим входом,
54 - амплитудно-временной квантователь.
Согласно фиг. 3 пятый вход блока 16 обработки сигналов пассивного радиоканала, на который поступают сигналы из широкополосного детектора 15 радиоимпульсов, соединен с входом амплитудно-временного квантователя 54, к выходу которого подключены обнуляющий вход счетчика 28 временных интервалов между радиоимпульсами, второй вход статического триггера 34, через элемент 38 задержки, - первый вход статического триггера 35 и первые входы вентилей 42, 43, при этом второй вход вентиля 42 соединен с прямым выходом статического триггера 35, инверсный выход которого подключен ко второму входу вентиля 43. Выход вентиля 42 соединен со входом записи регистра 29 начальных углов в пачке радиоимпульсов и со вторым входом элемента ИЛИ 51, первый вход которого соединен с выходом вентиля 43, а выход соединен с входом записи регистра 30 конечных улов в пачке радиоимпульсов. Информационные входы регистров 29, 30 соединены с шестым входом блока 16 обработки сигналов ПРК, на который поступает текущее значение кода углового положения антенны из блока 3 СВЧ приемопередатчика.
Входы сброса регистров 29, 30 соединены с выходом элемента 39 задержки, который через вентиль 44 соединен также с первым входом элемента ИЛИ 48 и непосредственно соединен со вторым входом элемента ИЛИ 50, выход которого подключен к установочному (второму) входу статического триггера 35, а первый вход, соединенный с первым входом элемента ИЛИ 49 и с обнуляющим входом счетчика 27 источников радиоимпульсов, подключен к четвертому входу блока 16 обработки сигналов ПРК.
Седьмой вход блока 16, на который поступают синхронизирующие импульсы со второго выхода синхронизатора 2, через вентиль 41 соединен со счетным входом счетчика 28 временных интервалов между радиоимпульсами, выход которого подключен к входу дешифратора 33 конца допустимого интервала между радиоимпульсами, выход которого соединен с входом элемента 39 задержки и со вторыми входами элемента ИЛИ 52 и элемента ИЛИ 49, выход которого соединен с первым входом статического триггера 34, а выход последнего соединен с управляющим входом вентиля 41.
Выходы регистров 29 и 30 начального и конечного углов пачки радиоимпульсов соединены с входами формирователя 31 полусуммы углов, выход которого подключен к информационному входу ОЗУ 32 источников радиоимпульсов, выход которого образует третий выход блока 16 обработки сигналов ПРК. Адресный вход ОЗУ 32 подключен к выходу счетчика 27 источников радиоимпульсов, а вход записи соединен с выходом вентиля 46, первый вход которого подключен к выходу элемента ИЛИ 52.
Второй вход блока 16 обработки сигналов ПРК, на который из блока 14 управления сканированием антенны поступает сигнал окончания сканирования, соединен с первым входом элемента ИЛИ 52, со вторым входом вентиля 47, а также, через элемент 40 задержки, - со вторым входом статического триггера 36, первый вход которого и первый вход статического триггера 37 соединены с третьим входом блока 16 обработки сигналов ПРК, на который поступает управляющий сигнал с пятого выхода блока 4 предстартовой подготовки.
Прямой выход статического триггера 36 соединен с первым входом вентиля 47, со вторым входом элемента И 53 с запрещающим входом и со вторым входом вентиля 45, первый вход которого соединен с восьмым входом блока 16 обработки сигналов ПРК, на который поступает сигнал со второго выхода блока 17 коррекции приоритетов, а выход вентиля 45 соединен со вторым входом элемента ИЛИ 48.
Инверсный выход статического триггера 36 соединен с управляющими входами вентилей 44, 46. Первый вход и выход элемента И 53 с запрещающим входом образуют соответственно первый вход и второй выход блока 16 обработки сигналов ПРК, первым выходом которого является выход статического триггера 37, второй вход которого подключен к выходу вентиля 47.
Блок 18 обнаружения и выбора объекта назначения выполнен по схеме, представленной на фиг. 4.
На фиг. 4 приняты следующие обозначения:
55 - сдвиговый регистр,
56 - оперативное запоминающее устройство (ОЗУ),
57 - сумматор единичных разрядов,
58 - пороговый блок,
59 - ОЗУ наличия цели,
60 - ОЗУ интенсивности цели,
61 - ОЗУ начального угла цели,
62, 63 - блоки сравнения,
64 - блок памяти интенсивности,
65 - блок памяти дальности,
66 - блок памяти угла,
67 - полусумматор,
68 - коммутатор,
69 - умножитель,
70, 71 - элементы задержки,
72-74 - элементы И,
75, 76 - инвертеры,
77 - датчик множителя приоритетов,
78 - пороговый блок,
79 - счетчик дальности.
Согласно фиг. 4 к первому входу БОВО 18, являющемуся входом, на которые поступают пусковые импульсы интервала зондирования, подключен вход обнуления счетчика 79 дальности, к выходу которого подключены вход записи блока 65 памяти дальности и адресные входы ОЗУ 59 наличия цели, ОЗУ 60 интенсивности цели, ОЗУ 61 начального угла цели и ОЗУ 56. Выходы ОЗУ 56 поразрядно соединены с входами разрядов сдвигового регистра 55, начиная со второго, а вход первого разряда регистра 55 сдвига соединен с выходом порогового блока 78, вход которого образует второй вход БОВО 18.
К третьему входу БОВО 18 подключены первый вход полусумматора 67 и вход записи ОЗУ 61 начального угла цели. К входу синхронизации БОВО 18 подключены вход элемента 70 задержки и вход синхронизации сдвигового регистра 55, выход которого соединен с входом записи ОЗУ 56 и входом сумматора 57 единичных разрядов.
Выход сумматора 57 соединен с входом порогового блока 58, первым входом блока 62 сравнения и входом записи ОЗУ 60 интенсивности цели, к выходу которого подключены второй вход блока 62 сравнения и первые входы коммутатора 68 и умножителя 69, второй вход которого подключен к датчику 77 множителя приоритетов, а выход подключен ко второму входу коммутатора 68, управляющий вход которого является четвертым входом блока БОВО 18.
К выходу коммутатора 68 подключен первый вход блока 63 сравнения и вход записи блока 64 памяти интенсивности, выход которого подключен ко второму входу блока 63 сравнения.
К выходу элемента 70 задержки подключены входы синхронизации элементов И 72 и 73 и вход элемента 71 задержки, выход которого соединен с входами синхронизации ОЗУ 59 наличия цели, ОЗУ 56, и элемента И 74, выход которого подключен к входу синхронизации ОЗУ 60 интенсивности цели. Первый вход элемента И 74 соединен с выходом блока 62 сравнения, а второй - с выходом порогового блока 58, который соединен также с входом записи ОЗУ 59, с первым входом элемента И 72 и через инвертор 75 - со вторым входом элемента И 73.
Выход ОЗУ 59 непосредственно соединен с первым входом элемента И 73 и, через инвертор 76, - со вторым входом элемента И 72, выход которого подключен к входу синхронизации ОЗУ 61 начального угла цели, выход которого соединен со вторым входом полусумматора 67. Выход полусумматора 67 подключен к входу записи блока 66 памяти угла, выход которого образует первый выход БОВО 18.
Третий вход элемента И 73 соединен с выходом блока 63 сравнения, а выход подключен к входам синхронизации блока 64 памяти интенсивности, блока 66 памяти угла и блока 65 памяти дальности, выход которого образует второй выход БОВО 18. Выход полусумматора 67 образует третий выход БОВО 18.
Блок 17 коррекции приоритетов выполнен по схеме, представленной на фиг. 5.
На фиг. 5 приняты следующие обозначения:
80 - датчик величины Δ допустимого разброса между измеренными углами объекта в активном и в пассивном радиоканалах,
81 - формирователь нижней границы допустимого угла объекта в активном канале, выполненный в виде вычитателя кодов,
82 - формирователь верхней границы допустимого угла объекта в активном канале, выполненный в виде сумматора кодов,
83 - блок сравнения с нижней границей,
84 - блок сравнения с верхней границей,
85 - элемент И,
86 - элемент И, генерирующий одиночный импульс,
87 - инвертор.
Согласно фиг. 5 первый вход блока 17 коррекции приоритетов, на который из блока 16 обработки сигналов ПРК поступает значение ψИР азимутального угла первого зафиксированного источника радиоизлучения, соединен с первыми входами формирователей 81 и 82 нижней и верхней границы допустимого угла объекта в активной канале, вторые входы которых подключены к выходу датчика 80 величины Δ допустимого разброса между измеренными углами в активном и пассивном каналах. Выходы формирователей 81, 82 подключены к первым входам соответственно блока 83 сравнения с нижней границей и блока 84 сравнения с верхней границей, вторые входы которых соединены со вторым входом блока 17 коррекции приоритетов, на который из БОВО 18 поступает текущее значение ψА азимута цели, обнаруженной активным радиоканалом. К выходу блока 83 сравнения с нижней границей подключены первые входы элемента И 85 и элемента И 86, генерирующего одиночный импульс. К выходу блока 84 сравнения с верхней границей непосредственно подключен второй вход элемента И 85 и, через инвертор 87, - второй вход элемента И 86. Выходы элементов И 85, 86 образуют соответственно первый и второй выходы блока 17 коррекции приоритетов.
Блок 4 предстартовой подготовки выполнен по схеме, представленной на фиг. 6.
На фиг. 6 приняты следующие обозначения:
88 - счетчик обратного счета,
89 - датчик начальной дальности, выполненный в виде шины,
90 - задающий генератор счета дальности,
91 - элемент задержки кодового сигнала,
92 - датчик контрольной скорости, выполненный в виде шины,
93, 94 - коммутаторы соответственно кодового сигнала и сигнала скорости,
95 - триггер пуска,
96 - триггер отмены пуска,
97 - датчик контрольного угла, выполненный в виде шины,
98 - блок сравнения,
99 - элемент задержки на время предстартовой подготовки,
100 - элемент И,
101 - вентиль отмены пуска,
102 - инвертор,
103 - генератор задержанного одиночного импульса.
Согласно фиг. 6 к первому входу блока 4 предстартовой подготовки, на который из датчика 10 поступает сигнал запуска предстартовой подготовки, подключены элемент 99 задержки, первые входы триггера 95 пуска и триггера 96 отмены пуска и установочный вход счетчика 88 обратного счета, вход записи которого подключен к датчику 89 начальной дальности, а вход синхронизации соединен с выходом задающего генератора 90 счета дальности. Выход счетчика 88 соединен с управляющим входом управляемого элемента 91 задержки кодового сигнала, выход которого соединен со вторым входом коммутатора 93 кодового сигнала, выход которого образует второй выход блока 4 предстартовой подготовки, а первый вход коммутатора 93 и второй вход управляемого элемента 91 задержки соединены со вторым входом блока 4, на который поступает выходной сигнал генератора 7 кода.
Третий вход блока 4 предстартовой подготовки, на который из блока 3 СВЧ приемопередатчика поступает код текущего углового положения антенны, соединен с первым входом блока 98 сравнения, второй вход которого подключен к датчику 97 контрольного угла, а выход соединен с первым входом элемента И 100 и, через инвертор 102, - с входом вентиля 101 отмены пуска, выход которого соединен со вторым входом триггера 96 отмены пуска. Инверсный выход триггера 96 отмены пуска образует четвертый выход блока 4, а прямой выход соединен с третьим входом элемента И 100, второй вход которого и управляющий вход вентиля 101 отмены пуска подключены к выходу элемента 99 задержки на время предстартовой подготовки.
Выход элемента И 100 подключен ко второму входу триггера 95 пуска, прямой выход которого соединен с входом генератора 103 задержанного одиночного импульса, выход которого образует пятый выход блока 4 предстартовой подготовки. Третий выход блока 4 предстартовой подготовки которого соединен с инверсным выходом триггера 95 пуска, к которому подключены также управляющие входы коммутатора 93 кодового сигнала и коммутатора 94 сигнала скорости. Выход коммутатора 94 сигнала скорости и его первый вход образуют соответственно первый выход и четвертый вход блока 4 предстартовой подготовки, а второй вход коммутатора 94 подключен к датчику 92 контрольной скорости.
Моноимпульсная радиолокационная система работает следующим образом.
Основным режимом работы РЛС является активный режим. В активном режиме работы возбудитель 1 формирует сигнал несущей частоты, поступающий на второй вход блока 3 СВЧ приемопередатчика, сигнал гетеродинной частоты и опорный сигнал промежуточной частоты, поступающие на второй и третий входы блока 5 обработки сигналов, захвата и сопровождения (ОСЗС).
Синхронизатор 2 формирует на первом выходе пусковые импульсы (ПИЗ) с частотой повторения интервалов зондирования и синхронизирующие импульсы на втором выходе с частотой дискретизации принимаемых сигналов. Пусковые импульсы поступают в том числе на входы генератора 7 кодов и амплитудного модулятора 6. При этом генератор 7 кодов формирует двоичный код фазовой манипуляции (ФМ), который поступает на четвертый вход блока 5 ОСЗС, а также через второй вход блока 4 предстартовой подготовки передается на его второй выход, с которого поступает на первый вход блока 3 СВЧ приемопередатчика. Амплитудный модулятор 6 формирует импульс огибающей, определяющий длительность зондирующего сигнала, который поступает на третий вход блока 3 СВЧ приемопередатчика.
При этом в блоке 3 известным способом с помощью фазового манипулятора, усилителя мощности, коммутатора питания и сигнала огибающей с выхода амплитудного модулятора 6 формируется фазоманипулированный сигнал заданной длительности и мощности, излучаемый через антенну в пространство.
Принимаемый антенной эхо-сигнал с помощью суммарно-разностного преобразователя и антенного переключателя (циркулятора) разделяется на суммарный и разностный каналы, усиливается в усилителях высокой часты и поступает на первый (суммарный) и второй (разностный) выходы блока 3 СВЧ приемопередатчика, а с них - соответственно на пятый и шестой входы блока 5 ОСЗС.
В блоке 5 указанные сигналы суммарного и разностного каналов известным способом смешиваются с сигналом гетеродина (поступающим на второй вход блока 5) в смесителях с полосовой фильтрацией, усиливаются в усилителях промежуточной частоты, детектируются в квадратурных фазовых детекторах с использованием опорного сигнала промежуточной частоты (поступающего на третий вход блока 5), подвергаются компенсации доплеровского сдвига с помощью доплеровских компенсаторов, управляемых сигналом скорости БПЛА, поступающим на первый вход блока 5 ОСЗС с первого выхода блока 4 предстартовой подготовки.
Далее сигналы с доплеровских компенсаторов известным способом поступают в цифровые согласованные фильтры, настроенные сигналом с четвертого входа блока 5 ОСЗС на сжатие импульса с кодом, поступившим в фильтры от генератора 7 кодов. Сигнал с ЦСФ суммарного канала после объединения квадратур поступает через первый выход блока 5 на второй вход блока 18 обнаружения и выбора объекта назначения (БОВО).
В результате работы блока 18 (БОВО), которая будет изложена ниже, на его первом и втором выходах формируются соответственно сигнал угла и сигнал дальности выбранного объекта, которые поступают соответственно на первый вход блока 9 вычитания и на седьмой вход блока 5 ОСЗС.
При поступлении на восьмой вход блока 5 сигнала «захват», формирование которого будет изложено ниже, в блоке 5 известным способом реализуется захват и сопровождение выбранного объекта с использованием дискриминатора дальности, частотного дискриминатора величины доплеровского смещения, и углового дискриминатора, сигнал которого через второй выход блока 5 поступает на второй вход блока 9 вычитания, на выходе которого формируется разность значений углов, поступающих с первого выхода блока 18 БОВО и со второго выхода блока 5 ОСЗС.
Указанный разностный угловой сигнал с выхода блока 9 поступает на первый вход коммутатора 12, управляющий вход которого соединен с восьмым входом блока 5 ОСЗС и подключен к выходу элемента И-ИЛИ 19. В режиме захвата и сопровождения объекта этот сигнал имеет единичное значение и обеспечивает формирование на выходе коммутатора 12 сигнала, соответствующего сигналу на его первом входе. Указанный сигнал с выхода коммутатора 12 поступает через четвертый вход блока 3 СВЧ приемопередатчика на управляющий вход привода антенны и, таким образом, замыкает контур сопровождения объекта по углу.
Перед переходом к активному режиму, изложенному выше, РЛС последовательно работает в нескольких предварительных режимах.
Перед началом работы РЛС датчиком 10 сигнала предстартовой подготовки формируется одиночный импульс запуска предстартовой подготовки, поступающий на первый вход блока 4 предстартовой подготовки и через элемент 13 ИЛИ - на пусковой (первый) вход блока 14 управления сканированием антенны. При этом в блоке 4 предстартовой подготовки указанный импульс запускает элемент 99 задержки на время предстартовой подготовки, поступает на установочный вход счетчика 88 обратного счета и записывает в него код начальной дальности, поступающий от датчика 89. На синхровход счетчика 88 подаются импульсы от задающего генератора 90, под воздействием которых код дальности в счетчике 88 уменьшается с заданной скоростью.
Указанный код дальности подается на вход управляемого элемента 91 задержки, который задерживает сигнал, поступающий на него от генератора кода 7 через второй вход блока 4 предстартовой подготовки на время, соответствующее имитируемой дальности до объекта, и подает его на контрольный вход коммутатора 93.
Одновременно сигнал датчика 10 устанавливает в нулевое состояние триггер 95 пуска и в единичное состояние триггер 96 отмены пуска. При этом сигнал с инверсного выхода триггера 95 поступает на третий выход блока 4 предстартовой подготовки и устанавливает внутри блока в контрольное состояние коммутатор 94 сигнала скорости БПЛА и коммутатор 93 кодового сигнала от генератора кода 7, что приводит к формированию на первом выходе блока 4 БПП сигнала контрольной скорости, а на втором выходе блока 4 - задержанного в управляемом элементе задержки 91 сигнала от генератора 7 кода.
Сигналы с первого и второго выходов блока 4 предстартовой подготовки поступают на первые входы соответственно блока 5 ОСЗС и блока 3 СВЧ приемопередатчика, а единичный сигнал с третьего выхода блока 4 поступает на первые входы элемента 19 И-ИЛИ и блока 16 обработки сигналов пассивного радиоканала (ПРК).
Сигнал пуска, поступивший на первый вход блока 14 управления сканированием антенны, устанавливает в нем триггер 26 и счетчик 21 в нулевое состояние, вследствие чего на первом выходе блока 14 устанавливается код, сформированный датчиком 23 начального угла, а на втором выходе блока 14 - нулевой сигнал, поступающий, в том числе, на второй вход блока 16 ПРК, что приводит к формированию на его первом выходе нулевого сигнала, поступающего на третий вход элемента И-ИЛИ 19 и формирующего нулевой сигнал на его выходе.
Нулевой сигнал с выхода элемента И-ИЛИ 19 устанавливает коммутатор 12 в положение пропускания на выход сигнала со своего второго входа, подключенного к первому выходу блока 14, вследствие чего на выходе коммутатора 12 формируется сигнал управления приводом, поступающий на четвертый вход блока 3 СВЧ приемопередатчика и начинающий двигать антенну в начальный угол, соответствующий сигналу датчика 23 начального угла в блоке 14.
Сигнал пуска с выхода элемента ИЛИ 13 в блоке 14 управления сканированием антенны поступает также на элемент 20 задержки и по прошествии времени задержки, достаточного для установки антенны в начальное положение, соответствующее сигналу от датчика 23, поступает через третий выход блока 14 на четвертый вход блока 16, а также устанавливает в единичное состояние триггер 26, выходной сигнал которого поступает через четвертый выход блока 14 на второй вход элемента 19 И-ИЛИ. При этом на выходе элемента И-ИЛИ 19 формируется единичный сигнал, поступающий на восьмой вход (сигнала захвата) блока 5 ОСЗС и на управляющий вход коммутатора 12 кодов управления приводом антенны, переводя его в состояние, при котором на его выходе сигнал управления приводом антенны соответствует коду, поступающему из блока 9 вычитания на его первый вход.
Таким образом, блок 5 ОСЗС и привод антенны в блоке 3 СВЧ приемопередатчика переводятся в режим сопровождения объекта, а сигнал с третьего выхода блока 4 предстартовой подготовки через первый вход блока 16 ПРК поступает на запрещающий вход элемента И 53, обеспечивая нулевой сигнал на втором выходе блока 16 ПРК и на пятом входе блока 3 СВЧ приемопередатчика, отключая в нем питание от усилителя мощности передатчика.
Блок 3 СВЧ приемопередатчика в режиме предстартовой подготовки при отключенном от усилителя мощности питании не излучает известным способом зондирующий сигнал, а сигнал, поступающий на его первый вход со второго выхода блока 4 предстартовой подготовки и представляющий собой задержанный сигнал генератора 7 кода, преобразуется с помощью фазового манипулятора и сигнала несущей частоты, поступающего от возбудителя 1, в фазоманипулированный СВЧ сигнал, имитирующий эхо сигнал от объекта, приближающегося с заданной скоростью. Этот сигнал в блоке 3 СВЧ приемопередатчика через направленный ответвитель поступает на контрольный вход суммарно-разностного преобразователя, что приводит к имитации на первом и втором выходах блока 3 в суммарном и разностном каналах сигнала от цели, находящейся на азимутальном угле, отличном от начального угла положения антенны, и на изменяющейся с заданной скоростью дальности.
Указанные сигналы суммарного и разностного каналов известным образом поступают в блок 5 ОСЗС аналогично активному режиму работы РЛС, изложенному выше.
В блоке 5 ОСЗС при этом выполняется сопровождение имитируемого сигнала аналогично активному режиму работы РЛС с участием блока 9 вычитания, коммутатора 12 и привода антенны в блоке 3 СВЧ приемопередатчика, что приводит к угловому перемещению антенны и изменению сигнала от датчика углового положения антенны на третьем выходе блока 3 СВЧ приемопередатчика.
Указанный сигнал поступает, в том числе, на третий вход блока 4 предстртовой подготовки и в нем - на первый вход блока 98 сравнения, в котором выполняется сравнение этого сигнала с сигналом датчика 97 контрольного угла.
При совпадении сравниваемых кодов в пределах допуска, определяемого разрядностью кода датчика 97, на выходе блока 98 сравнения формируется единичный сигнал, сохраняющийся в интервале времени, пока привод антенны передвигает антенну в заданных допуском угловых границах.
Номинальный интервал времени на реализацию режима предстартовой подготовки заложен в элементе 99 задержки, на выходе которого формируется одиночный импульс по истечении указанного интервала от пускового импульса, поступившего на первый вход блока 4 от датчика 10.
Если импульс с выхода элемента 99 задержки не совпадает с единичным сигналом на выходе блока 98 сравнения, то, с учетом инвертора 102, на выходе вентиля 101 формируется единичный сигнал, устанавливающий в нулевое состояние триггер 96 отмены пуска, инверсный выход которого является четвертым выходом блока 4 БПП, сигнал с которого поступает на индикатор 11 отмены пуска. Одновременно прямой выход триггера 96 своим сигналом блокирует элемент И 100.
Если импульс с выхода элемента 99 задержки совпадает с единичным сигналом блока 98 сравнения, что означает исправность всей проверяемой аппаратуры, то на выходе элемента И 100 формируется единичный сигнал, устанавливающий триггер 95 пуска в единичное состояние.
При этом на третьем выходе блока 4 предстартовой подготовки формируется нулевой сигнал, открывающий элемент И 53 в блоке 16 обработки сигналов пассивного канала через его первый вход и поступающий также на первый вход элемента И-ИЛИ 19, на выходе которого также формируется нулевой сигнал, отменяющий режим захвата-сопровождения с восьмого входа блока 5 ОСЗС и переключающий коммутатор 12 на прохождение сигнала с его второго входа.
Кроме того, нулевой сигнал с инверсного выхода триггера 95 переключает коммутаторы 94 и 93 в блоке 4 предстартовой подготовки с контрольного состояния в штатное, при котором на первый и второй выходы блока 4 проходят соответственно сигналы из штатного датчика 8 скорости, поступающие на четвертый вход блока 4, и сигналы генератора 7 кодов непосредственно, минуя элемент 91 задержки, передаваемые со второго входа блока 4 на его второй выход. Таким образом, все элементы РЛС оказываются в состоянии готовности к штатной работе.
Одновременно в блоке 4 предстартовой подготовки сигнал с прямого выхода триггера 95 поступает на вход генератора 103 задержанного одиночного импульса. Задержка в генераторе 103 обеспечивает перемещение БПЛА, на котором установлена РЛС, в зону штатной работы. По истечении установленного времени задержки на выходе генератора 103 формируется одиночный импульс, поступающий на пятый выход блока 4.
Сформированный на пятом выходе блока 4 импульс переводит РЛС в режим работы пассивного радиоканала. Указанный импульс поступает через элемент ИЛИ 13 на первый вход блока 14 управления сканированием антенны и непосредственно на третий вход блока 16 обработки сигналов ПРК.
В блоке 14 при этом, как было изложено выше, производится установка в нулевое состояние счетчика 21 и триггера 26 и обеспечивается задержка в элементе 20 на время установки антенны в исходное состояние, определяемое датчиком 23.
В блоке 16 обработки сигналов ПРК импульс, поступивший на третий вход, передается на обнуляющие входы триггеров 36 и 37. Нулевой сигнал с прямого выхода триггера 36 запирает вентиль 45 и элемент И 53, а единичный сигнал с инверсного выхода триггера 36 открывает вентили 44 и 46.
По истечении времени задержки выходной сигнал элемента 20 задержки в блоке 14 управления сканированием устанавливает в единичное состояние триггер 26, выходной сигнал которого поступает на четвертый выход блока 14, а также открывает вентиль 22, через который на синхровход счетчика 21 со второго входа блока 14 управления сканированием поступают импульсы запуска интервала зондирования от синхронизатора 2. Выходной сигнал счетчика 21 складывается с сигналом датчика 23 в сумматоре 24, результирующий код которого поступает на дешифратор 25 конечного кода и на первый выход блока 14 БУС, с которого через второй вход коммутатора 12 в виде управляющего сигнала на выходе коммутатора подается на четвертый вход блока 3 СВЧ приемопередатчика, приводя в движение привод антенны с постоянной скоростью сканирования пространства.
Одновременно с началом сканирования выходной импульс элемента 20 задержки поступает через третий выход блока 14 на четвертый вход блока 16 обработки сигналов ПРК, обнуляя в нем состояние триггера 34 через элемент ИЛИ 49, обнуляя счетчик 27 источников радиосигнала и устанавливая в единичное состояние триггер 35 через элемент ИЛИ 50. Поступление единичного сигнала с четвертого выхода блока 14 БУС на второй вход элемента И-ИЛИ 19 не вызывает изменений его выходного сигнала.
На пятый вход блока 16 обработки сигналов ПРК поступает сигнал широкополосного детектора 15 радиоимпульсов, подключенного к первому выходу (суммарного канала) блока 3 СВЧ приемопередатчика, на шестой вход блока 16 поступает сигнал датчика углового положения антенны с третьего выхода блока 3 СВЧ приемопередатчика, а на седьмой вход блока 16 поступает импульсный сигнал дискретизации со второго выхода синхронизатора 2.
Таким образом запускается обработка сигналов ПРК в режиме сканирования пространства антенной.
Сигнал детектора 15 радиоимпульсов с пятого входа блока 16 поступает в амплитудно-временной квантователь 54, настроенный на пороговый уровень сигнала выше шумового фона. В случае появления радиоимпульса в широкополосном приемном тракте РЛС, на выходе амплитудно-временного квантователя 54 формируется положительный импульс, который устанавливает триггер 34 в единичное состояние, обнуляет счетчик 28, проходит через открытый сигналом триггера 35 вентиль 42 и поступает на вход записи регистра 29 начального угла источника радиосигналов и, через элемент ИЛИ 51, - на вход записи регистра 30 конечного угла источника радиосигналов.
На информационные входы регистров 29 и 30 подается текущее значение кода датчика угла с шестого входа блока 16 обработки сигналов ПРК.
Таким образом, в регистры 29 и 30 записывается одинаковое текущее значение угла антенны, после чего с задержкой, сформированной элементом 38 импульс с выхода амплитудно-временного квантователя 54 устанавливает триггер 35 в нулевое состояние, закрывая вентиль 42 и открывая вентиль 43.
Если после этого на пятом входе блока 16 ПРК через небольшой интервал времени будет обнаружен новый импульс, то этот импульс проходит через открытый вентиль 43, элемент ИЛИ 51 и записывает в регистр 30 новое значение конечного угла, поступающего с шестого входа блока 16 обработки сигналов ПРК.
Каждый новый импульс с амплитудно-временного квантователя 54 обнуляет счетчик 28, на синхровход которого поступают синхроимпульсы через открытый вентиль 41. Содержимое счетчика 28 характеризует время, прошедшее с момента прихода и обнаружения последнего импульса от источника радиосигналов.
Выходной сигнал счетчика 28 подключен к дешифратору 33, настроенному на интервал времени, соответствующий максимальному интервалу зондирования типичных радиолокаторов.
В случае, если счетчик 28 не сбрасывается в нулевое состояние в течение более длительного интервала времени, то срабатывает дешифратор 33, формируя импульс окончания приема импульсов от источника радиосигналов.
Указанный импульс с выхода дешифратора 33 проходит через элемент ИЛИ 49, обнуляет состояние триггера 34 и закрывает вентиль 41.
Кроме того, указанный импульс проходит через элемент ИЛИ 52 и открытый вентиль 46 на вход записи ОЗУ 32. При этом сигналы с выходов регистров 29 и 30, соответствующие углам начала и конца пачки импульсов от одного источника радиосигналов поступают в блок 31 формирования полусуммы входных кодов.
Выходной сигнал блока 31, соответствующий среднему углу пачки обнаруженных радиоимпульсов, поступает на информационный вход ОЗУ 32 и записывается импульсом с вентиля 46 в адрес, сформированный счетчиком 27, подключенным к адресному входу ОЗУ 32.
Выходной импульс дешифратора 33 задерживается элементом 39 задержки и после выполнения изложенных операций с выхода элемента 39 задержки поступает через открытый вентиль 44, элемент ИЛИ 48 на синхровход счетчика 27, увеличивая на единицу адрес ОЗУ 32 для записи информации о следующем источнике радиосигналов.
Кроме того, сигнал с выхода элемента 39 задержки поступает на обнуляющие входы и сбрасывает регистры 29 и 30, а также через элемент ИЛИ 50 поступает на установочный вход триггера 35, подготавливая блок к приему информации о следующем источнике радиосигналов.
Изложенный процесс продолжается в течение всего сканинга антенны. Окончание сканинга определяется дешифратором 25 в блоке 14 управления сканированием. При достижении на сумматоре 24 значения, соответствующего конечному углу поворота антенны, дешифратор 25 срабатывает, и на его выходе формируется одиночный импульс окончания сканирования.
Указанный импульс со второго выхода блока 14 управления сканированием поступает на второй вход блока 16 обработки сигналов ПРК, проходит через элемент ИЛИ 52 и вентиль 46 на вход записи ОЗУ 32 и записывает в него информацию о последнем источнике радиосигнала, если пачка соответствующих импульсов оказалась незаконченной раньше. После этого с задержкой на элементе 40 задержки сигнал со второго входа блока 16 ПРК устанавливает триггер 36 в единичное состояние, открывая при этом вентиль 45, закрывая вентили 44 и 46 и формируя на втором выходе блока 16 ПРК единичный сигнал поступающий на пятый вход блока 3 СВЧ приемопередатчика и обеспечивающий включение усилителя мощности в блоке 3.
Таким образом, по окончании сканирования пространства пассивным радиоканалом в ОЗУ 32 последовательно в адресах, начиная с нулевого, оказываются записанными средние значения углов от пачек радиоимпульсов обнаруженных источников радиосигналов.
Импульс со второго выхода блока 14 БУС поступает также через элемент ИЛИ 13 на первый вход блока 14, после чего начинается сканирование в активном режиме работы РЛС.
При этом в блоке 14 управления сканированием аналогично изложенным выше процедурам обнуляются счетчик 21 и триггер 26, обеспечивается задержка в элементе 20 задержки на время установки антенны в исходное состояние, определяемое датчиком 23, после чего открывается вентиль 22, и счетчик 21 начинает считать поступающие пусковые импульсы интервалов зондирования.
На выходе сумматора 24 происходит постепенное увеличение кода, который поступает на вход коммутатора 12 и преобразуется в управляющий сигнал, поступающий на четвертый вход (управления приводом антенны) блока 3 СВЧ приемопередатчика.
Вследствие того, что, как рассмотрено выше, по окончании сканирования антенны в пассивном режиме был включен усилитель мощности в блоке 3 СВЧ приемопередатчика, в процессе разворота антенны осуществляется излучение зондирующего импульсного сигнала в каждом интервале зондирования.
Отраженные от объектов эхо-сигналы известным способом принимаются блоком 3 СВЧ приемопередатчика, усиливаются в суммарном и разностном каналах и через первый и второй выходы блока 3 СВЧ приемопередатчика передаются на пятый и шестой входы блока 5 ОСЗС. В блоке 5 ОСЗС указанные сигналы обрабатываются известным способом, в результате чего на первом выходе блока 5 ОСЗС формируется сжатый в цифровом согласованном фильтре сигнал, поступающий на второй вход блока 18 обнаружения и выбора объекта назначения.
На первый вход БОВО 18 поступают импульсы запуска интервала зондирования с первого выхода синхронизатора 2, а на пятый вход - синхроимпульсы дискретизации со второго выхода синхронизатора 2, поступающие соответственно на обнуляющий и счетный входы счетчика 79, в результате чего на его выходе формируется код текущей дальности.
Сигнал со второго входа БОВО 18 поступает на вход порогового блока 78, где сравнивается с установленным в нем пороговом сигналом, в результате чего на выходе блока 78 формируется бинарный сигнал, поступающий на вход сдвигового регистра 55. Синхросигнал с пятого входа блока БОВО 18 поступает на синхровход сдвигового регистра 55 и на элемент 70 задержки. При этом в первый разряд сдвигового регистра 55 записывается сигнал с выхода порогового блока 78, а в остальные разряды, начиная со второго, записывается со сдвигом сигнал, поступающий с выхода ОЗУ 56 из ячейки, адрес которой определяется сигналом текущей дальности, поступающим из счетчика 79 дальности.
Указанный код текущего элемента дальности с выхода счетчика 79 поступает также на адресные входы ОЗУ 59 наличия цели, ОЗУ 60 интенсивности цели, ОЗУ 61 начального угла цели и на вход записи блока 65 памяти дальности. Сигнал с выхода сдвигового регистра 55 поступает на вход ОЗУ 56 и записывается в него синхроимпульсом с пятого входа, прошедшим через элементы 70 и 71 задержки.
Таким образом, после определенного количества интервалов зондирования в ячейках ОЗУ 56 формируется пачка единичных сигналов, соответствующая пачке отраженных импульсов от цели, или шумовая совокупность случайных единичных сигналов на фоне большого количества нулевых разрядов.
Сигнал с выхода сдвигового регистра 55 поступает также на вход сумматора 57 единичных разрядов, на выходе которого при этом формируется код, равный количеству единичных разрядов в выходном сигнале регистра 55 сдвига. Выходной сигнал сумматора 57 поступает на вход порогового блока 58, где сравнивается с заданным порогом обнаружения цели по логике К из N, где К - число единичных разрядов в регистре 55, а N - общее число разрядов в нем.
В случае превышения указанного порога, что соответствует обнаружению цели в текущем элементе дальности, единичный выходной сигнал порогового блока 58 поступает на элемент И 72, на второй вход которого через инвертор 76 поступает сигнал из ОЗУ 59 наличия цели. Если в предыдущем интервале зондирования в текущую ячейку ОЗУ 59 был записан нулевой сигнал, свидетельствовавший об отсутствии обнаружения, то единичный выходной сигнал инвертора 76 совпадает с единичным выходным сигналом порогового блока 58, что свидетельствует о начале пачки отраженных от цели импульсов. В этом случае через элемент И 72 проходит синхроимпульс с выхода элемента 70 задержки, который поступает на вход синхронизации ОЗУ 61 и записывает в его ячейку, соответствующую текущему элементу дальности, код угла начала пачки импульсов от цели, поступающий на него от датчика углового положения антенны через третий вход БОВО 18 с третьего выхода блока 3 СВЧ приемопередатчика.
Выходной сигнал сумматора 57 единичных разрядов, характеризующий интенсивность цели в текущем элементе дальности, поступает также на вход ОЗУ 60 интенсивности цели и на первый вход блока 62 сравнения, на второй вход которого поступает из ОЗУ 60 сигнал интенсивности цели для текущего элемента дальности, записанный в него в предыдущем интервале зондирования. Если сигнал сумматора 57 превышает сигнал ОЗУ 60, то на выходе блока 62 сравнения формируется единичный сигнал, который поступает на первый вход элемента И 74, на второй вход которого поступает выходной сигнал порогового блока 58. В случае, если этот сигнал единичный, что свидетельствует об обнаружении цели, то через элемент И 74 проходит синхроимпульс с выхода элемента 71 задержки и записывает интенсивность цели в ОЗУ 60 интенсивности цели.
В результате многократного повторения изложенных операций в ОЗУ 60 заносится максимальная интенсивность целей для каждого элемента дальности. В случае, когда в текущем зондировании с порогового блока 58 поступает нулевой сигнал, свидетельствующий об отсутствии обнаружения, а из ОЗУ 59 наличия цели - единичный сигнал, свидетельствующий о наличии обнаружения в предыдущем интервале зондирования, то такое сочетание сигналов свидетельствует о конце пачки в текущем элементе дальности. При этом на элемент И 73 поступают два единичных сигнала: из ОЗУ 59 и, через инвертор 75, из блока 58.
В это время из ОЗУ 60 сигнал максимальной интенсивности цели для текущего элемента дальности поступает на первый информационный вход коммутатора 68, на второй информационный вход, которого поступает тот же сигнал максимальной интенсивности цели, но умноженный в умножителе 69 на коэффициент множителя, установленный в датчике 77 множителя приоритета.
На управляющий вход коммутатора 68 подается сигнал с четвертого входа БОВО 18.
Через коммутатор 68 выполняется взаимодействие БОВО 18 с блоком 16 обработки сигналов ПРК, которое реализуется следующим образом. Импульс с выхода элемента 20 задержки через третий выход блока 14 управления сканированием поступает на четвертый вход блока 16 обработки сигналов ПРК и обнуляет в нем код счетчика 27, поступающий на адресный вход ОЗУ 32, в котором зафиксированы угловые координаты обнаруженных на предыдущем сканинге источников радиоизлучений.
При этом на выход ОЗУ 32 и соответственно на третий выход блока 16 ПРК поступает азимутальный угол первого зафиксированного источника радиосигналов ΨИР. Этот сигнал передается на первый вход блока 17 коррекции приоритетов, в котором с помощью датчика 80 величины допустимого разброса между измеренными углами объекта в пассивном и активном режимах, формирователей 81 и 82 соответственно нижней границы и верхней границы допустимого угла в активном режиме формируются граничные сигналы, поступающие на первые входы блоков 83 и 84 сравнения, соответственно. На вторые входы указанных блоков сравнения поступает текущее значение угла ΨА активного радиоканала с третьего выхода блока 18 обнаружения и выбора объекта назначения через второй вход блока 17 коррекции приоритетов.
Если текущее значение угла ΨА находится между нижней и верхней допустимыми границами, выходные сигналы блоков 83 и 84 сравнения через элемент И 85 формируют единичный сигнал управления ПРК, который через первый выход блока 17 поступает на четвертый вход БОВО 18 и с него - на управляющий вход коммутатора 68.
При нулевом значении этого сигнала на выход коммутатора 68 проходит сигнал максимальной интенсивности цели непосредственно с выхода ОЗУ 60, а при единичном значении - сигнал максимальной интенсивности, умноженный дополнительно в блоке 69 на коэффициент блока 77 множителя приоритетов.
Таким образом, если текущий угол, соответствующий обнаруженной в АРК цели, совпадает в пределах заданного допуска с азимутальным углом источника радиосигналов, обнаруженного в ПРК, то приоритет такой цели повышается в заданной пропорции.
Если по мере сканирования антенны текущее значение азимутального угла цели на третьем выходе БОВО 18 выходит за верхний допустимый предел, то в блоке 17 коррекции приоритетов на выходе блока 84 сравнения с верхним пределом формируется нулевой сигнал, который обнуляет через элемент И 85 сигнал на первом выходе блока 17 и соответственно через четвертый вход блока 18 БОВО - управляющий сигнал коммутатора 68, вследствие чего приоритет возможной обнаруживаемой цели снижается.
В то же время в блоке 17 коррекции приоритетов нулевой сигнал с выхода блока 84 через инвертор 87 открывает элемент И 86, на выходе которого генерируется одиночный импульс, который через второй выход блока 17 поступает на восьмой вход блока 16 ПРК, проходит через открытый вентиль 45 и элемент ИЛИ 48 на синхровход счетчика 27 источников радиосигналов и формирует адрес следующего источника, поступающий на адресный вход ОЗУ 32. При этом на третьем выходе блока 16 ПРК формируется угол следующего обнаруженного источника радиосигналов.
В блоке 18 обнаружения и выбора объекта назначения сигнал с выхода коммутатора 68, представляющий собой сигнал максимальной интенсивности цели для текущего элемента дальности с учетом информации канала ПРК об обнаруженных источниках радиоизлучений, поступает в блок 64 памяти интенсивности и в блок 63 сравнения. На второй вход блока 63 сравнения поступает сигнал из блока 64 памяти интенсивности, записанный в него в один из предыдущих интервалов зондирования. На выходе блока 63 сравнения формируется единичный сигнал в том случае, если текущий сигнал интенсивности с выхода коммутатора 68 превышает сигнал интенсивности, записанный в блок 64 памяти ранее. Единичный сигнал с выхода блока 63 сравнения поступает на третий вход элемента И 73, открывая его для прохождения синхроимпульса с выхода элемента 70 задержки.
Таким образом, на выходе элемента И 73 формируется импульс в момент окончания пачки отраженных импульсов от цели, интенсивность которой превышает интенсивность целей, обнаруженных ранее, с учетом информации ПРК.
Импульс с выхода элемента И 73 поступает на синхровход блока 64 памяти интенсивности и записывает в него сигнал текущей интенсивности. В результате многократного повторения изложенных операций в блок 64 памяти интенсивности записывается максимальная интенсивность цели, обнаруженной РЛС с учетом информации АРК и ПРК.
Импульс с выхода элемента И 73 поступает также на синхровход блока 65 памяти дальности и записывает в него сигнал дальности обнаруженной цели с максимальным приоритетом.
Текущее значение угла поворота антенны через третий вход БОВО 18 поступает также на первый вход полусумматора 67, на второй вход которого поступает код угла начала пачки импульсов от цели для текущего элемента дальности из ОЗУ 61. На выходе полусумматора 67 при этом формируется сигнал полусуммы угловых положений антенны, соответствующих началу пачки отраженных импульсов и текущему моменту времени.
В момент формирования импульса на выходе элемента И 73 (конец пачки импульсов от цели) сигнал на выходе полусумматора 67 равен полусумме координат начала и конца пачки отраженных от цели импульсов, что соответствует угловым координатам цели. Этот сигнал поступает в блок 66 памяти угла и записывается в него выходным импульсом элемента И 73.
После многократного выполнения изложенных операций в блоки 65 и 66 памяти дальности и угла записываются координаты цели, обнаруженной РЛС и имеющей максимальную интенсивность с учетом информации ПРК.
Таким образом, к концу сканирования в активном режиме на первом и втором выходах блока 18 обнаружения и выбора объекта назначения формируются координаты соответственно азимутального угла и дальности наиболее приоритетной из обнаруженных целей.
По завершении сканирования, как было изложено выше, на втором выходе блока 14 управления сканированием формируется одиночный импульс, поступающий на второй вход блока 16 ПРК. В блоке 16 этот импульс проходит через открытый вентиль 47 на установочный вход триггера 37, устанавливая его в единичное состояние. Выходной сигнал триггера 37 поступает на первый выход блока 16 и с него - через элемент И-ИЛИ 19 на восьмой вход блока 5 ОСЗС и на управляющий вход коммутатора 12.
При этом РЛС переходит в режим сопровождения выбранной цели известным способом аналогично прототипу.
На основании приведенного описания и чертежей предлагаемое устройство может быть изготовлено при использовании известных комплектующих изделий и известного в радиоэлектронной промышленности технологического оборудования и использовано на подвижных носителях в качестве РЛС для обнаружения и сопровождения целей.
Источники информации
1. Леонов А.И., Фомичев К.И., Моноимпульсная радиолокация. М., Сов. Радио,1970 г.
2. Справочник по радиолокации. / Ред. М. Сколник., М., Сов. Радио. - 1978 г. Т. 4.
3. Патент РФ №2178896, МПК GO1S 13/44, публикация 27.01.2002 г.
4. Патент РФ №2309430, МПК GO1S 13/44, публикация 27.10.2007 г., прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2759511C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2084922C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2124221C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
Изобретение относится к радиолокационным системам (РЛС) с импульсным фазоманипулированным зондирующим сигналом, используемым на подвижных носителях, преимущественно на беспилотных летательных аппаратах (БПЛА), и предназначенным для обнаружения и сопровождения моноимпульсным способом сигналов от объектов назначения (целей). Технический результат - повышение эффективности РЛС при установке на БПЛА. Для достижения указанного технического результата перед включением РЛС в активный режим с излучением мощного зондирующего сигнала и сканированием лучом антенны области возможного положения объектов назначения предлагается для их обнаружения выполнять предварительное сканирование этой области в пассивном скрытном режиме, предусматривающем только обнаружение радиосигналов приемным трактом в расширенном частотном диапазоне без излучения собственного зондирующего сигнала, а при выборе объекта назначения учитывать не только мощность отраженного им эхо-сигнала, но еще и факт обнаружения посторонних радиосигналов с того же направления по азимуту. Сущность изобретения заключается в том, что моноимпульсная радиолокационная система содержит возбудитель, синхронизатор, генератор кода, амплитудный модулятор, блок сверхвысокочастотного (СВЧ) приемопередатчика, блок обработки сигналов, захвата и сопровождения (ОСЗС), блок обнаружения и выбора объекта назначения, блок предстартовой подготовки, датчик сигнала предстартовой подготовки, датчик скорости, индикатор отмены пуска, блок обработки сигналов пассивного радиоканала (ПРК), блок коррекции приоритетов, блок управления сканированием антенны, широкополосный детектор радиоимпульсов, коммутатор кодов управления приводом антенны, блок вычитания, элемент И-ИЛИ и элемент ИЛИ, определенным образом соединенные между собой. 6 ил.
Моноимпульсная радиолокационная система, содержащая возбудитель, синхронизатор, на первом выходе которого формируются пусковые импульсы с частотой повторения интервалов зондирования, а на втором - синхронизирующие импульсы с частотой дискретизации обрабатываемых сигналов, генератор кода и амплитудный модулятор, входы которых подключены к первому выходу синхронизатора, блок сверхвысокочастотного (СВЧ) приемопередатчика, блок обработки сигналов, захвата и сопровождения (ОСЗС), блок обнаружения и выбора объекта назначения и блок предстартовой подготовки, первый вход которого соединен с выходом датчика сигнала предстартовой подготовки, а четвертый вход и четвертый выход соединены соответственно с выходом датчика скорости и входом индикатора отмены пуска, отличающаяся тем, что в нее введены блок обработки сигналов пассивного радиоканала (ПРК), блок коррекции приоритетов, блок управления сканированием антенны, коммутатор кодов управления приводом антенны, а также блок вычитания, элемент И-ИЛИ и элемент ИЛИ, выход которого соединен с первым, пусковым, входом блока управления сканированием антенны, первый выход которого соединен со вторым входом коммутатора кодов управления приводом антенны, третий выход соединен с четвертым входом блока обработки сигналов ПРК, четвертый выход соединен со вторым входом элемента И-ИЛИ, а второй выход, на котором формируется сигнал окончания сканирования, соединен со вторым входом блока обработки сигналов ПРК и с третьим входом элемента ИЛИ, первый вход которого подключен к выходу датчика сигнала предстартовой подготовки, а второй вход, соединенный с третьим входом блока обработки сигналов ПРК, подключен к пятому выходу блока предстартовой подготовки, выходы возбудителя, на которых формируются сигнал гетеродинной частоты и опорный сигнал промежуточной частоты, соединены соответственно со вторым и третьим входами блока ОСЗС, а выход сигнала несущей частоты соединен со вторым входом блока СВЧ приемопередатчика, первый вход которого соединен со вторым выходом блока предстартовой подготовки, на котором формируется значение кода фазовой манипуляции, третий вход - с выходом амплитудного модулятора, а четвертый вход - с выходом коммутатора кодов управления приводом антенны, первый вход которого подключен к выходу блока вычитания, а управляющий вход, соединенный с восьмым входом, сигнала захвата, блока ОСЗС, подключен к выходу элемента И-ИЛИ, первый выход, сигналов суммарного канала, блока СВЧ приемопередатчика соединен с пятым входом блока ОСЗС и с входом широкополосного детектора радиоимпульсов, выход которого подключен в пятому входу блока обработки сигналов ПРК, второй выход, сигналов разностного канала, блока СВЧ приемопередатчика соединен с шестым входом блока ОСЗС, а третий выход, сигналов текущего углового положения антенны, соединен с третьим входом блока обнаружения и выбора объекта назначения, с шестым входом блока обработки сигналов ПРК и с третьим входом блока предстартовой подготовки, второй вход которого соединен с выходом генератора кода, первый выход блока предстартовой подготовки, на котором формируется значение скорости, соединен с первым входом блока ОСЗС, а третий выход соединен с первыми входами блока обработки сигналов ПРК и элемента И-ИЛИ, третий вход которого подключен к первому выходу блока обработки сигналов ПРК, второй выход блока обработки сигналов ПРК, на котором формируется сигнал отключения питания усилителя мощности, соединен с пятым входом блока СВЧ приемопередатчика, а его третий выход и восьмой вход соединены соответственно с первым входом и вторым выходом блока коррекции приоритетов, второй вход и первый выход которого соединены соответственно с третьим выходом и четвертым входом блока обнаружения и выбора объекта назначения, первый выход которого соединен с первым входом блока вычитания, второй вход которого подключен ко второму выходу блока ОСЗС, четвертый вход, кода фазовой манипуляции, которого соединен с выходом генератора кода, а первый выход и седьмой вход соединены соответственно со вторым входом и вторым выходом блока обнаружения и выбора объекта назначения, при этом к первому выходу синхронизатора подключены второй вход блока управления сканированием антенны, первый вход блока обнаружения и выбора объекта назначения и девятый вход блока ОСЗС, а ко второму выходу синхронизатора подключены седьмой вход блока обработки сигналов ПРК, пятый вход блока обнаружения и выбора объекта назначения и десятый вход блока ОСЗС.
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| Моноимпульсная вторичная радиолокационная система с режимом S | 2013 |
|
RU2606386C2 |
| Головка к веретену для безбаллонниго прядения | 1938 |
|
SU54680A1 |
| US 6356231 B1, 12.03.2002 | |||
| JP 2007024554 A, 01.02.2007 | |||
| US 6498582 B1, 24.12.2002. | |||

