Изобретение относится к области радиолокации, в частности к области сопровождения цели на траектории движения в обзорных радиолокационных станциях.
Известны устройства аналогичного назначения, построенные на основе специализированных арифметико-логических устройствах, которые состоят из умножителей и сумматоров [Сатыга О.Г. Основы построения систем управления стрельбой корабельных артиллерийских комплексов и систем стабилизации корабельного вооружения. Академия военно-морских сил им. П.С. Нахимова. Севастополь. 2009. - С. 74-78]. Основными их недостатками являются сравнительно большой аппаратный объем и низкое быстродействие.
Задачей, на решение которой направлено заявляемое изобретение является разработка устройства для вычисления координаты, обладающего малым аппаратным объемом и способностью обрабатывать сигнал в масштабе реального времени.
Решение технической задачи достигается путем использования вероятностной формы представления данных, в связи с чем изменяется аппаратная реализация рассматриваемого прототипа.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков является уменьшение аппаратного объема вычислителя экстраполированной координаты и скорости ее изменения по методу наименьших квадратов при сохранении точностных характеристик и возможности обработки входного сигнала в масштабе реального времени, достигаемым путем замены в прототипе усилителей на блоки вероятностного умножения, а цифрового комбинационного сумматора на вероятностный сумматор и добавлении в схему вероятностного вычитателя и последовательных регистров.
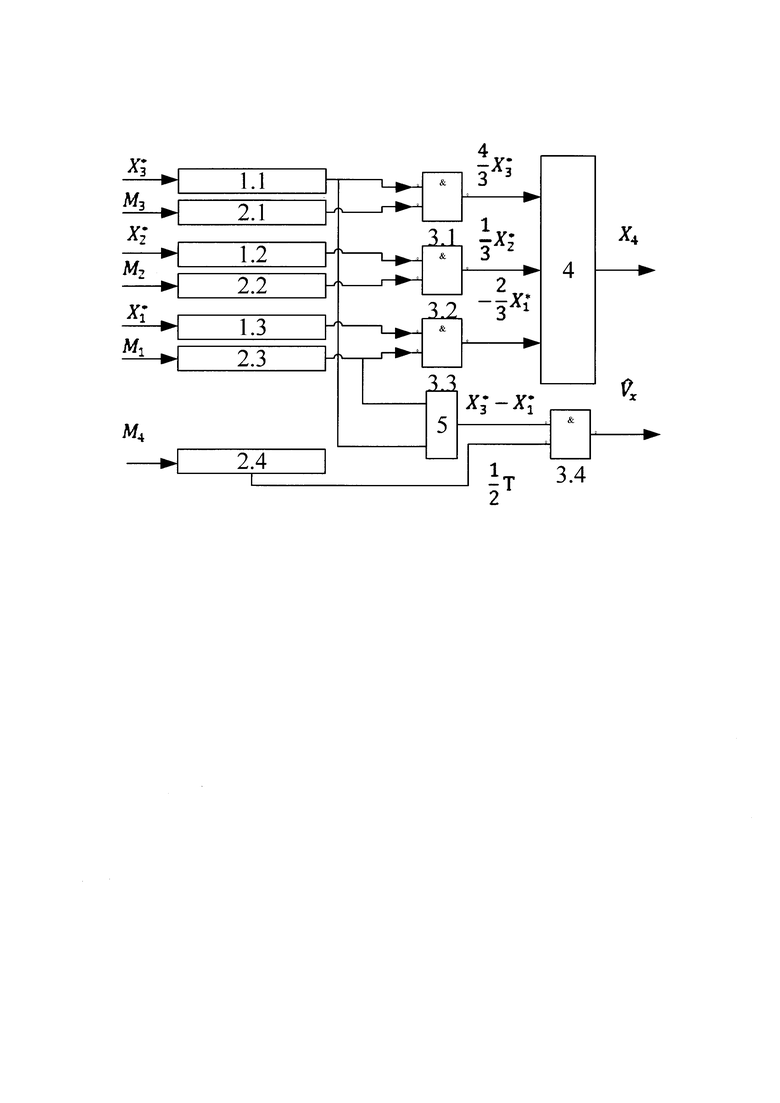
Сущность изобретения поясняется чертежом Фиг., на котором изображена функциональная схема вероятностного вычислителя координаты, где:
1.1, 1.2, 1.3 - регистры хранения значений измеренных координат X1, X2 и X3;
2.1, 2.2, 2.3, 2.4 - регистры хранения значений поправочных коэффициентов  соответственно, где T - время поворота антенны РЛС;
соответственно, где T - время поворота антенны РЛС;
3.1, 3.2, 3.3 и 3.4 - двухвходовые конъюнкторы, выполняющие функцию арифметических умножителей вероятностно представленных операндов;
4 - вероятностный сумматор в роли которого может выступать схема [Пат. 171033 Российская Федерация, МПК G06F 19/00 Параллельный вероятностный сумматор / Моисеев Д.В., Сапожников Н.Е.; заявитель ЧВВМУ им. П.С. Нахимова. - №2017100704; заявл. 10.01.2017; опубл. 17.05.2017, бюл. №14];
5 - вероятностный вычитатель, в роли которого может выступать схема [Пат. 181260 Российская Федерация, МПК G06F 7/70 (2006.01) G06F 17/18 (2006.01) Вероятностный вычитатель / Д.В. Моисеев, Н.Е. Сапожников; заявитель и патентообладатель ФГБВОУ ВО ЧВВМУ им. П.С. Нахимова Министерства обороны Российской Федерации (RU). -№2017139991, заявл. 16.11.2017; опубл. 06.07.2018 Бюл. №19].
Устройство рассчитано на вычисление экстраполированной координаты Xi и скорости ее изменения в i-ом наблюдении используя метод наименьших квадратов.
При решении задачи определения координаты необходимо знать оценку координаты на момент последнего (n-го) измерения и экстраполированную на один период отсчетов РЛС T оценку. Для n=3 оценка координаты на момент последнего наблюдения будет вычисляться по формуле:

Используя метод наименьших квадратов (МНК) при линейной гипотезе движения цели определим  по формулам:
по формулам:

где: 

где:

Функции (3) и (5) являются весовыми функциями оценки параметров.
Для получения экстраполированной на один период обзора координаты необходимо в выражение (1) вместо (n-1) подставить n.
Тогда получим:

где

весовая функция экстраполирования координаты X.
Весовые функции (3), (5) и (7) при решении задачи оценки параметров по методу МНК определяются заранее и вводятся в специально отведенные для них регистры.
При n=3, 
Вычислитель экстраполированной координаты и скорости ее изменения по методу наименьших квадратов функционирует следующим образом - до начала работы на входы схемы подаются значения поправочных коэффициентов и значения трех последних измеренных, через равный промежуток времени - T, соответствующий времени поворота антенны, представленные в виде вероятностных отображений.
В наиболее простом случае вероятностного преобразования, значение параметра преобразуемой величины либо всегда положительно, либо всегда отрицательно, а сам процесс преобразования выполняется в соответствии с правилом

где xi - i-е значение параметра преобразуемого сигнала X(t);
R(tij) - j-е значение параметра вспомогательного случайного сигнала R(t), изменяющегося в интервале изменения X(t);
 - число циклов преобразования сигнала X(t);
- число циклов преобразования сигнала X(t);
 - количество статистических испытаний каждого значения xi внутри временного интервала Δti-ti+1-ti;
- количество статистических испытаний каждого значения xi внутри временного интервала Δti-ti+1-ti;
yij - значение вероятностного отображения параметра сигнала xi из ряда Yi(t)={yi1; yi2;…yij;…yiK}.
Вероятностное отображение обладает свойствами синхронности (тактируемости) и независимости каждого члена отображения от любого другого.
Первое свойство заключается в том, что формирование членов вероятностного отображения производится через постоянный интервал времени Δti=ti+1-ti, определяемый частотой ƒj=1/Δtj выполнения правила (9).
Свойство независимости каждого члена вероятностного отображения yij от любого другого следует из того факта, что получение вероятностного отображения соответствует схеме испытаний Бернулли. Для случайной последовательности, полученной в соответствии с данной схемой, автокорреляционная функция представляет собой δ-функцию при τ=0. Для доказательства этого следует показать, что повторные испытания в соответствии с (9) также являются независимыми. Значения вспомогательной случайной функции R(t) формируются в дискретные моменты времени. В любой момент времени функция может находиться только в одном из своих состояний rij с вероятностью Pj(t). Очевидно, что для любого t
и при заданных вероятностях Pj(t) распределение rij может быть задано плотностью вероятности:
где
есть распределение фиксированной величины rij, определяемое функцией Дирака.
Использование этих свойств и применение вероятностно представленных дискретных сигналов позволяет упростить функциональные узлы для выполнения арифметических и логических операций, в частности, сложения, вычитания, умножения, возведения в целую степень, деления, компарации и т.д. и тем самым резко уменьшить их аппаратурный объем.
С учетом исходного правила преобразования, вероятности появления «1» и «0» в вероятностном отображении равняются:
P(yij=1)=P[R(tij)〈xi],
Р(yij=0)=1-Р[R(tij)〈xi].
Математическое ожидание от вероятностного отображения определяется через ряд распределения для дискретной случайной величины yij

Тогда

Таким образом, вероятность появления «1» в вероятностном отображении есть математическое ожидание от отображения и численно равняется значению интегрального закона распределения вспомогательного сигнала R(t) при уровне сравнения xi.
Особый интерес представляет случай, когда вспомогательный случайный сигнал R(t) подчиняется равномерному закону распределения в соответствии с
Для него последнее выражение для МО перепишется в виде:
M[Yi(t)]=P(yij=1)=xi,
т.е. имеем случай линейного вероятностного преобразования.
Таким образом, количество единиц в вероятностном отображении соответствует весу значения преобразуемого в вероятностную форму, что в свою очередь позволяет выполнять операцию умножения вероятностно представленного операнда на операнд представленный в двоичных позиционных кодах. Примером преобразователя информации в вероятностные отображения может служить схема - Пат. 2660831 Российская Федерация, МПК Н03М 7/00 (2006.01) Преобразователь двоичный код - вероятностное отображение / Д.В. Моисеев, Н.Е. Сапожников; заявитель и патентообладатель ФГБВОУ ВО ЧВВМУ им. П.С. Нахимова Министерства обороны Российской Федерации (RU). -№2017100609, заявл. 10.01.2017; опубл. 10.07.2018 Бюл. №18.
Значения с входов схемы записываются в регистры сдвига, измеренные значения координат в регистры (1.1), (1.2) и (1.3), а поправочные коэффициенты в регистры (2.1), (2.2), (2.3) и (2.4) соответственно.
После выполнения записи поправочных коэффициентов и значений измеренных координат представленных в виде вероятностных отображений в соответствующие регистры сдвига начинается работа схемы вычислителя экстраполированной координаты и скорости ее изменения по методу наименьших квадратов: значения измеренных координат Xi и соответствующим им поправочным коэффициентам Mi поступают на входы конъюнктурой (3.1), (3.2) и (3.3) соответственно.
Для вычисления произведения двух величин, представленных в виде вероятностных отражений, следует воспользоваться соотношением:
откуда следует, что для вычисления произведения двух вероятностно представленных сомножителей необходим один двухвходовой конъюнктор.
Результаты произведения X1 на M1, X2 на M2 и X3 на M3 поступают на схему параллельного вероятностного сумматора (4).
Для нахождения суммы вероятностно представленных сигналов воспользуемся соотношением:
При выполнении операции вычитания выполняем те же действия, что и для сложения двух слагаемых, второй из которых взят с обратным знаком, получим выражение при равномерном распределении вспомогательных случайных сигналов:
Значения с регистров (1.1) и (1.3) подаются на входы вероятностного вычитателя (5), с выхода которого совместно со значением поправочного коэффициента с выхода регистра (2.4), подаются на конъюнктор 3.4.
Выход сумматора (4) и конъюнктора (3.4) являются выходами всей схемы.
Технико-экономическая эффективность предлагаемого вероятностного вычислителя координаты состоит в уменьшении его аппаратного объема при сохранении точностных характеристик и возможности обработки входного сигнала в реальном масштабе времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРОЯТНОСТНЫЙ ВЫЧИСЛИТЕЛЬ КООРДИНАТЫ | 2018 |
|
RU2707960C1 |
| Вероятностный фильтр случайных процессов | 2018 |
|
RU2699681C1 |
| ВЕРОЯТНОСТНОЕ УСТРОЙСТВО ВЫЧИСЛЕНИЯ СРЕДНЕЙ ПОЛНОЙ МОЩНОСТИ | 2021 |
|
RU2771593C1 |
| ВЕРОЯТНОСТНОЕ УСТРОЙСТВО ВЫЧИСЛЕНИЯ МАТЕМАТИЧЕСКОГО ОЖИДАНИЯ | 2021 |
|
RU2761500C1 |
| ВЕРОЯТНОСТНОЕ УСТРОЙСТВО ВЫЧИСЛЕНИЯ ДИСПЕРСИИ | 2022 |
|
RU2803254C1 |
| Устройство генерации равномерно распределенных псевдослучайных чисел | 2024 |
|
RU2840424C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ТРЕНДА ПУТЕМ РАЗМНОЖЕНИЯ ОЦЕНОК ЕГО ЕДИНСТВЕННОЙ ИСХОДНОЙ РЕАЛИЗАЦИИ (РАЗОЦ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2207622C2 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ АППРОКСИМАЦИИ ПРИ ВЫДЕЛЕНИИ ПОЛЕЗНОГО СИГНАЛА В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЕННОСТИ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2013 |
|
RU2541919C1 |
| ТРЕХМЕРНЫЙ АДАПТИВНЫЙ α-β ФИЛЬТР | 2016 |
|
RU2631766C1 |
Изобретение относится к области радиолокации, в частности к области сопровождения цели на траектории в обзорных радиолокационных станциях. Технический результат состоит в разработке вычислителя экстраполированной координаты и скорости ее изменения по методу наименьших квадратов для усреднения полученных в результате трех последовательных, через равное время, измерений координаты РЛС. Для этого введены вероятностные множительные устройства, в роли которых выступают двухвходовые конъюнкторы, регистры сдвига, вероятностный вычитатель и вероятностный сумматор. 1 ил.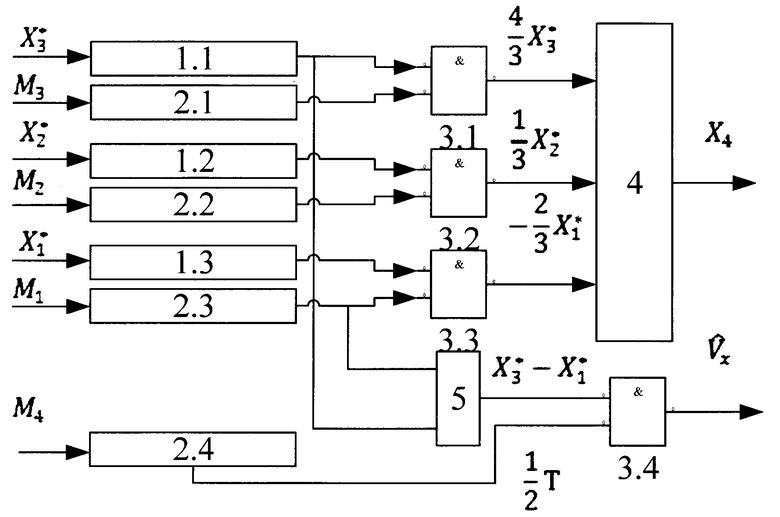
Вычислитель экстраполированной координаты и скорости ее изменения по методу наименьших квадратов, характеризующийся тем, что в состав схемы входят три последовательных регистра хранения результатов измерения координаты, четыре регистра хранения поправочных коэффициентов, четыре двухвходовых конъюнктора, один вычитатель и один параллельный сумматор на три входа, в начале работы схемы в регистры хранения результатов измерения координаты загружаются вероятностные отображения трех последних измеренных координат, в регистры хранения поправочных коэффициентов загружаются вероятностные отображения соответствующих поправочных координат для трех измерений координаты и один поправочный коэффициент для измерения скорости изменения координаты, после чего вероятностные отображения с выходов соответствующих регистров хранения поправочных коэффициентов и регистров хранения результатов измерения координаты попарно параллельно поступают на входы двухвходовых конъюнкторов, выполняющих функцию множительных устройств, произведение соответствующих координат и поправочных коэффициентов с выходов трех конъюнкторов поступают параллельно на входы вероятностного сумматора, на выходе которого формируется сумма произведений измеренных координат на соответствующие им поправочные коэффициенты, параллельно со значениями с третьего и первого регистров хранения результатов измерения координаты подаются соответственно на первый и второй входы вероятностного вычитателя, разность с выхода которого поступает на первый вход четвертого конъюнктора, на второй вход которого подается поправочный коэффициент с четвертого регистра хранения поправочных коэффициентов, на выходе которого формируются произведения разности третьего и первого измерений координаты на соответствующий поправочный коэффициент, выходы четвертого конъюнктора и сумматора являются выходами всей схемы.
| УСТРОЙСТВО для связи ПРОЛЕТНОГО РЕЗОНАТОРА | 0 |
|
SU171033A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2463560C1 |
| US 9424750 B2, 23.08.2016 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |

