Изобретение относится к области навигационных систем, а именно к интегрированным навигационным системам.
Известен навигационный комплекс [1], содержащий инерциальную навигационную систему, приемник спутниковой навигационной системы, блок вычисления навигационных параметров.
Наиболее близким по технической сущности является навигационный комплекс [2], содержащий инерциальную навигационную систему (ИНС) с гироплатформой (ГП), навигационный вычислитель с устройством коррекции, фильтр-идентификатор оценок (ФИО), вычислитель поправок, источник сигналов коррекции ИНС, причем на основании ГП установлены акселерометры и гироскопы, по каждой из осей ГП установлен синусно-косинусный вращающийся трансформатор (СКВТ) и двигатель стабилизации, в ИНС выполнены преобразователи аналог-код для обработки сигналов акселерометров и СКВТ, преобразователи код-частота для стабилизации и управления ГП, выходы ИНС с данными составляющих абсолютных скоростей Vξ, Vη, Vζ, в системе координат Oξηζ, опорного трехгранника ГП, гироскопического курса ΨГ, углов крена γ, тангажа ϑ соединены с одними из входов навигационного вычислителя, с другими входами которого соединены выходы источника сигналов коррекции ИНС, в навигационном вычислителе выполнены постоянное запоминающее устройство (ПЗУ) с данными угловой скорости U Земли, константами a, ge, g, e выражения для определения ускорения свободного падения, вычислительные средства для расчета выдаваемых сигналов географической широты φ, географической долготы λ, азимута χ ГП, линейных скоростей Vx, Vy в связанной системе координат объекта, проекций Uξ, Uη, Uζ угловой скорости Земли на оси опорного трехгранника ГП, северной UN и восточной UE составляющих угловой скорости Земли, абсолютных угловых скоростей ωξ, ωη, составляющих вектора местного ускорения свободного падения gξ, gη, gζ, радиусов кривизны Rξ, Rη земного эллипсоида по сечениям, проходящим через оси ГП, радиусов кривизны меридиана RN, параллели RE, вспомогательного параметра RO, тригонометрических функций, причем выходы вычислителя поправок подключены к входам навигационного вычислителя.
Недостатком такого навигационного комплекса является возникновение погрешности определения навигационных параметров, так как погрешности инерциальной навигационной системы корректируются по результатам предыдущего полета.
Техническим результатом изобретения является повышение точности навигационного комплекса.
Данный технический результат достигается в навигационном комплексе, содержащем инерциальную навигационную систему (ИНС) с гироплатформой (ГП), навигационный вычислитель с устройством коррекции, фильтр-идентификатор оценок (ФИО), вычислитель поправок, источник сигналов коррекции ИНС, причем на основании ГП установлены акселерометры и гироскопы, по каждой из осей ГП установлен синусно-косинусный вращающийся трансформатор (СКВТ) и двигатель стабилизации, в ИНС выполнены преобразователи аналог-код для обработки сигналов акселерометров и СКВТ, преобразователи код-частота для стабилизации и управления ГП, выходы ИНС с данными составляющих абсолютных скоростей Vξ, Vη, Vζ,, в системе координат Oξηζ опорного трехгранника ГП, гироскопического курса ΨГ, углов крена γ, тангажа ϑ соединены с одними из входов навигационного вычислителя, с другими входами которого соединены выходы источника сигнала коррекции ИНС, в навигационном вычислителе выполнены постоянное запоминающее устройство (ПЗУ) с данными угловой скорости U Земли, константами a, ge, g, e выражения для определения ускорения свободного падения, вычислительные средства для расчета выдаваемых сигналов географической широты φ, географической долготы λ, азимута χ ГП, линейных скоростей Vx, Vy в связанной системе координат объекта, проекций Uξ, Uη, Uζ угловой скорости Земли на оси опорного трехгранника ГП, северной UN и восточной UE составляющих угловой скорости Земли, абсолютных угловых скоростей ωξ, ωη составляющих вектора местного ускорения свободного падения gξ, gη, gζ, радиусов кривизны Rξ, Rη земного эллипсоида по сечениям, проходящим через оси ГП, радиусов кривизны меридиана RN, параллели RE, вспомогательного параметра RO, тригонометрических функций, причем выходы вычислителя поправок подсоединены к входам навигационного вычислителя, тем, что в навигационном вычислителе выполнено вычислительное устройство для преобразования измеренных с помощью источника сигналов коррекции ИНС скоростей Wx, Wy, WZ в их проекции VξK, VηK на оси опорного трехгранника ГП, с входами навигационного вычислителя соединены выходы источника сигналов коррекции ИНС, содержащие данные об измеренных составляющих путевой скорости Wx, Wy, WZ в связанных с объектом осях, с входами ФИО соединены выходы ИНС с данными абсолютных скоростей Vξ, Vη, выходы навигационного вычислителя с данными линейных скоростей Vx, Vy, составляющей Uζ угловой скорости Земли, абсолютных угловых скоростей ωξ, ωη, составляющей вектора местного ускорения свободного падения gζ, радиусов кривизны Rξ, Rη земного эллипсоида, горизонтальных составляющих скорости VξK, VηK в проекциях на оси опорного трехгранника ГП, полученных по измерениям скоростей посредством источника сигналов коррекции ИНС, азимута χ, географической широты φ, с входами вычислителя поправок соединены выходы навигационного вычислителя с данными азимута χ, географической широты φ, северной составляющей UN угловой скорости Земли, выходы ФИО с данными оценки угла рассогласования  между осью Z реального трехгранника ГП и осью ζ, опорного трехгранника ГП, угла рассогласования
между осью Z реального трехгранника ГП и осью ζ, опорного трехгранника ГП, угла рассогласования  между осью X реального трехгранника ГП и осью ξ, опорного трехгранника ГП, оценок скоростей дрейфа
между осью X реального трехгранника ГП и осью ξ, опорного трехгранника ГП, оценок скоростей дрейфа  ,
, относительно осей X и Y соответственно, выходы ФИО с оценками углов рассогласования
относительно осей X и Y соответственно, выходы ФИО с оценками углов рассогласования 
 угла рассогласования
угла рассогласования  между осью Y реального трехгранника ГП и осью η опорного трехгранника ГП подключены к входам навигационного вычислителя, выходы вычислителя поправок с данными поправок в географическую широту и географическую долготу также подсоединены к входам навигационного вычислителя; в ФИО выполнены шестнадцать регистров хранения, в которых прошиты значения оптимальных коэффициентов усиления K11, К21, K31, К41, К51, К61, К71, К81, К12, К22, К32, К42, К52, К62, К72, К82 соответственно, выполнены вычислительные устройства для формирования в продольном канале ГП оценок погрешности скорости
между осью Y реального трехгранника ГП и осью η опорного трехгранника ГП подключены к входам навигационного вычислителя, выходы вычислителя поправок с данными поправок в географическую широту и географическую долготу также подсоединены к входам навигационного вычислителя; в ФИО выполнены шестнадцать регистров хранения, в которых прошиты значения оптимальных коэффициентов усиления K11, К21, K31, К41, К51, К61, К71, К81, К12, К22, К32, К42, К52, К62, К72, К82 соответственно, выполнены вычислительные устройства для формирования в продольном канале ГП оценок погрешности скорости  , угла рассогласования , скорости дрейфа
, угла рассогласования , скорости дрейфа  , в боковом канале ГП оценок погрешности скорости
, в боковом канале ГП оценок погрешности скорости  , угла рассогласования
, угла рассогласования  , скорости дрейфа
, скорости дрейфа  , в азимутальном канале ГП оценок рассогласования
, в азимутальном канале ГП оценок рассогласования  , скорости дрейфа
, скорости дрейфа  ; в вычислителе поправок выполнены вычислительные устройства для формирования поправок в географическую широту φ и географическую долготу λ; в вычислительном устройстве для формирования оценок в продольном канале ГП выполнены восемнадцать сумматоров, семнадцать устройств умножения, три устройства деления, три интегратора, при этом выход навигационного вычислителя с данными скорости Vx подсоединен к суммирующему входу первого сумматора, к вычитающему входу которого подключен выход навигационного вычислителя с данными проекции скорости VξK, к выходу первого сумматора подсоединен суммирующий вход второго сумматора, к выходу которого подключены первые входы первого, второго и третьего устройств умножения, выход регистра хранения с оптимальным коэффициентом усиления К71 подсоединен к второму входу первого устройства умножения, выход которого подключен к первому суммирующему входу третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления К72 подключен к первому входу четвертого устройства умножения, выход которого подсоединен к второму суммирующему входу третьего сумматора, выход третьего сумматора соединен с входом первого интегратора, выход которого подключен к первому суммирующему входу четвертого сумматора и является выходом ФИО с оценкой дрейфа , выход ИНС с данными скорости Vη подсоединен к первому входу пятого устройства умножения, выход которого подключен к суммирующему входу пятого сумматора, к первому входу шестого устройства умножения подключен выход ИНС с данными скорости Vξ, выход ФИО с оценкой угла рассогласования
; в вычислителе поправок выполнены вычислительные устройства для формирования поправок в географическую широту φ и географическую долготу λ; в вычислительном устройстве для формирования оценок в продольном канале ГП выполнены восемнадцать сумматоров, семнадцать устройств умножения, три устройства деления, три интегратора, при этом выход навигационного вычислителя с данными скорости Vx подсоединен к суммирующему входу первого сумматора, к вычитающему входу которого подключен выход навигационного вычислителя с данными проекции скорости VξK, к выходу первого сумматора подсоединен суммирующий вход второго сумматора, к выходу которого подключены первые входы первого, второго и третьего устройств умножения, выход регистра хранения с оптимальным коэффициентом усиления К71 подсоединен к второму входу первого устройства умножения, выход которого подключен к первому суммирующему входу третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления К72 подключен к первому входу четвертого устройства умножения, выход которого подсоединен к второму суммирующему входу третьего сумматора, выход третьего сумматора соединен с входом первого интегратора, выход которого подключен к первому суммирующему входу четвертого сумматора и является выходом ФИО с оценкой дрейфа , выход ИНС с данными скорости Vη подсоединен к первому входу пятого устройства умножения, выход которого подключен к суммирующему входу пятого сумматора, к первому входу шестого устройства умножения подключен выход ИНС с данными скорости Vξ, выход ФИО с оценкой угла рассогласования  подсоединен к второму входу шестого устройства умножения, выход которого подключен к вычитающему входу пятого сумматора, выход пятого сумматора подключен к второму суммирующему входу четвертого сумматора, выход регистра хранения с оптимальным коэффициентом усиления К11 подсоединен к второму входу второго устройства умножения, к выходу которого подключен первый суммирующий вход шестого сумматора, выход регистра хранения с оптимальным коэффициентом усиления К12 подключен к первому входу седьмого устройства умножения, выход которого подсоединен к второму суммирующему входу шестого сумматора, выход шестого сумматора подсоединен к первому суммирующему входу седьмого сумматора, к первому входу восьмого устройства умножения подсоединен выход данных скорости Vη ИНС, выход данных угловой скорости ωη навигационного вычислителя подключен к второму входу восьмого устройства умножения, к выходу которого подсоединен первый вход девятого устройства умножения, выход ФИО с оценкой угла рассогласования подключен к второму входу девятого устройства умножения, выход которого соединен с вычитающим входом восьмого сумматора, выход восьмого сумматора подключен к второму суммирующему входу седьмого сумматора, выход которого подсоединен к суммирующему входу девятого сумматора, выход ИНС с данными скорости Vξ подсоединен к первому входу десятого устройства умножения, второй вход которого соединен с выходом навигационного вычислителя с данными угловой скорости ωη, к выходу десятого устройства умножения подключен вычитающий вход десятого сумматора, к суммирующему входу которого подсоединен выход навигационного вычислителя с данными проекции gζ вектора ускорения свободного падения, к выходу десятого сумматора подключен вычитающий вход девятого сумматора, выход которого соединен с входом второго интегратора, выход второго интегратора соединен с первым суммирующим входом одиннадцатого сумматора, первым входом первого устройства деления и является выходом ФИО оценки погрешности скорости , выход регистра хранения с оптимальным коэффициентом усиления К41 соединен с вторым входом третьего устройства умножения, выход которого соединен с суммирующим входом двенадцатого сумматора, выход регистра хранения с оптимальным коэффициентом усиления К42 подключен к первому входу одиннадцатого устройства умножения, выход которого соединен с вторым суммирующим входом двенадцатого сумматора, к выходу которого подключен второй суммирующий вход одиннадцатого сумматора, выход одиннадцатого сумматора соединен с вычитающим входом второго сумматора, выход навигационного вычислителя с данными радиуса кривизны Rξ земного эллипсоида подключен к второму входу первого устройства деления, первым входам второго и третьего устройств деления, выход ИНС с данными скорости Vξ подсоединен к второму входу второго устройства деления, выход которого соединен с первым входом двенадцатого устройства умножения, а к его второму входу подключен выход ФИО с оценкой угла рассогласования , выход двенадцатого устройства умножения подсоединен к вычитающему входу тринадцатого сумматора, выход ФИО с оценкой угла рассогласования подключен к первому входу тринадцатого устройства умножения, а к его второму входу подсоединен выход навигационного вычислителя с данными угловой скорости, выход тринадцатого устройства умножения подключен к вычитающему входу четырнадцатого сумматора, к суммирующему входу которого подсоединен выход четвертого сумматора, выход ИНС с данными скорости Vη подсоединен к второму входу третьего устройства деления, к выходу которого подключен первый суммирующий вход пятнадцатого сумматора, выход навигационного вычислителя с данными угловой скорости Uζ подключен к второму суммирующему входу пятнадцатого сумматора, выход которого соединен с первым входом четырнадцатого устройства умножения, выход четырнадцатого устройства умножения подключен к первому суммирующему входу тринадцатого сумматора, второй суммирующий вход которого соединен с выходом четырнадцатого сумматора, выход тринадцатого сумматора подсоединен к первому суммирующему входу шестнадцатого сумматора, к второму суммирующему входу которого подключен выход первого устройства деления, выход шестнадцатого сумматора подключен к входу третьего интегратора, выход которого подсоединен к вторым входам шестого и двенадцатого устройств умножения и является выходом ФИО с оценкой угла рассогласования , выход ИНС с данными скорости Vζ соединен с первым входом пятнадцатого устройства умножения, к второму входу которого подключен выход ФИО с оценкой скорости дрейфа , выход навигационного вычислителя с данными угловой скорости Uζ подключен к первому входу шестнадцатого устройства умножения, к выходу которого подсоединен первый суммирующий вход семнадцатого сумматора, выход пятнадцатого устройства умножения соединен с вторым суммирующим входом семнадцатого сумматора, выход которого подсоединен к суммирующему входу восемнадцатого сумматора, выход ИНС с данными скорости Vη подключен к первому входу семнадцатого устройства умножения, к выходу которого подсоединен вычитающий вход восемнадцатого сумматора, выход восемнадцатого сумматора подключен к суммирующему входу восьмого сумматора; в вычислительном устройстве для формирования оценок в боковом канале ГП выполнены пятнадцать сумматоров, семнадцать устройств умножения, три устройства деления, три интегратора, выход навигационного вычислителя с данными скорости Vy подключен к суммирующему входу первого сумматора, к вычитающему входу которого подсоединен выход навигационного вычислителя с данными скорости VηK, выход первого сумматора подсоединен к суммирующему входу второго сумматора, выход которого соединен с первыми входами первого, второго и третьего устройств умножения, с вторыми входами четвертого, седьмого и одиннадцатого устройств умножения в вычислительном устройстве формирования оценок в продольном канале ГП, выход регистра хранения с оптимальным коэффициентом усиления К22 подключен к второму входу первого устройства умножения, к выходу которого подсоединен первый суммирующий вход третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления К21 соединен с первым входом четвертого устройства умножения, выход которого подключен к второму суммирующему входу третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления K62 подключен к второму входу третьего устройства умножения, выход которого соединен с первым суммирующим входом четвертого сумматора, к выходу регистра хранения с оптимальным коэффициентом усиления К61 подсоединен первый вход пятого устройства умножения, к выходу которого подключен второй суммирующий вход четвертого сумматора, выход четвертого сумматора подключен к входу первого интегратора, выход которого подключен к первым входам пятого сумматора и шестого устройства умножения и является выходом ФИО с оценкой скорости дрейфа
подсоединен к второму входу шестого устройства умножения, выход которого подключен к вычитающему входу пятого сумматора, выход пятого сумматора подключен к второму суммирующему входу четвертого сумматора, выход регистра хранения с оптимальным коэффициентом усиления К11 подсоединен к второму входу второго устройства умножения, к выходу которого подключен первый суммирующий вход шестого сумматора, выход регистра хранения с оптимальным коэффициентом усиления К12 подключен к первому входу седьмого устройства умножения, выход которого подсоединен к второму суммирующему входу шестого сумматора, выход шестого сумматора подсоединен к первому суммирующему входу седьмого сумматора, к первому входу восьмого устройства умножения подсоединен выход данных скорости Vη ИНС, выход данных угловой скорости ωη навигационного вычислителя подключен к второму входу восьмого устройства умножения, к выходу которого подсоединен первый вход девятого устройства умножения, выход ФИО с оценкой угла рассогласования подключен к второму входу девятого устройства умножения, выход которого соединен с вычитающим входом восьмого сумматора, выход восьмого сумматора подключен к второму суммирующему входу седьмого сумматора, выход которого подсоединен к суммирующему входу девятого сумматора, выход ИНС с данными скорости Vξ подсоединен к первому входу десятого устройства умножения, второй вход которого соединен с выходом навигационного вычислителя с данными угловой скорости ωη, к выходу десятого устройства умножения подключен вычитающий вход десятого сумматора, к суммирующему входу которого подсоединен выход навигационного вычислителя с данными проекции gζ вектора ускорения свободного падения, к выходу десятого сумматора подключен вычитающий вход девятого сумматора, выход которого соединен с входом второго интегратора, выход второго интегратора соединен с первым суммирующим входом одиннадцатого сумматора, первым входом первого устройства деления и является выходом ФИО оценки погрешности скорости , выход регистра хранения с оптимальным коэффициентом усиления К41 соединен с вторым входом третьего устройства умножения, выход которого соединен с суммирующим входом двенадцатого сумматора, выход регистра хранения с оптимальным коэффициентом усиления К42 подключен к первому входу одиннадцатого устройства умножения, выход которого соединен с вторым суммирующим входом двенадцатого сумматора, к выходу которого подключен второй суммирующий вход одиннадцатого сумматора, выход одиннадцатого сумматора соединен с вычитающим входом второго сумматора, выход навигационного вычислителя с данными радиуса кривизны Rξ земного эллипсоида подключен к второму входу первого устройства деления, первым входам второго и третьего устройств деления, выход ИНС с данными скорости Vξ подсоединен к второму входу второго устройства деления, выход которого соединен с первым входом двенадцатого устройства умножения, а к его второму входу подключен выход ФИО с оценкой угла рассогласования , выход двенадцатого устройства умножения подсоединен к вычитающему входу тринадцатого сумматора, выход ФИО с оценкой угла рассогласования подключен к первому входу тринадцатого устройства умножения, а к его второму входу подсоединен выход навигационного вычислителя с данными угловой скорости, выход тринадцатого устройства умножения подключен к вычитающему входу четырнадцатого сумматора, к суммирующему входу которого подсоединен выход четвертого сумматора, выход ИНС с данными скорости Vη подсоединен к второму входу третьего устройства деления, к выходу которого подключен первый суммирующий вход пятнадцатого сумматора, выход навигационного вычислителя с данными угловой скорости Uζ подключен к второму суммирующему входу пятнадцатого сумматора, выход которого соединен с первым входом четырнадцатого устройства умножения, выход четырнадцатого устройства умножения подключен к первому суммирующему входу тринадцатого сумматора, второй суммирующий вход которого соединен с выходом четырнадцатого сумматора, выход тринадцатого сумматора подсоединен к первому суммирующему входу шестнадцатого сумматора, к второму суммирующему входу которого подключен выход первого устройства деления, выход шестнадцатого сумматора подключен к входу третьего интегратора, выход которого подсоединен к вторым входам шестого и двенадцатого устройств умножения и является выходом ФИО с оценкой угла рассогласования , выход ИНС с данными скорости Vζ соединен с первым входом пятнадцатого устройства умножения, к второму входу которого подключен выход ФИО с оценкой скорости дрейфа , выход навигационного вычислителя с данными угловой скорости Uζ подключен к первому входу шестнадцатого устройства умножения, к выходу которого подсоединен первый суммирующий вход семнадцатого сумматора, выход пятнадцатого устройства умножения соединен с вторым суммирующим входом семнадцатого сумматора, выход которого подсоединен к суммирующему входу восемнадцатого сумматора, выход ИНС с данными скорости Vη подключен к первому входу семнадцатого устройства умножения, к выходу которого подсоединен вычитающий вход восемнадцатого сумматора, выход восемнадцатого сумматора подключен к суммирующему входу восьмого сумматора; в вычислительном устройстве для формирования оценок в боковом канале ГП выполнены пятнадцать сумматоров, семнадцать устройств умножения, три устройства деления, три интегратора, выход навигационного вычислителя с данными скорости Vy подключен к суммирующему входу первого сумматора, к вычитающему входу которого подсоединен выход навигационного вычислителя с данными скорости VηK, выход первого сумматора подсоединен к суммирующему входу второго сумматора, выход которого соединен с первыми входами первого, второго и третьего устройств умножения, с вторыми входами четвертого, седьмого и одиннадцатого устройств умножения в вычислительном устройстве формирования оценок в продольном канале ГП, выход регистра хранения с оптимальным коэффициентом усиления К22 подключен к второму входу первого устройства умножения, к выходу которого подсоединен первый суммирующий вход третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления К21 соединен с первым входом четвертого устройства умножения, выход которого подключен к второму суммирующему входу третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления K62 подключен к второму входу третьего устройства умножения, выход которого соединен с первым суммирующим входом четвертого сумматора, к выходу регистра хранения с оптимальным коэффициентом усиления К61 подсоединен первый вход пятого устройства умножения, к выходу которого подключен второй суммирующий вход четвертого сумматора, выход четвертого сумматора подключен к входу первого интегратора, выход которого подключен к первым входам пятого сумматора и шестого устройства умножения и является выходом ФИО с оценкой скорости дрейфа  , выход регистра хранения с оптимальным коэффициентом усиления К32 соединен с вторым входом второго устройства умножения, к выходу которого подсоединен первый суммирующий вход шестого сумматора, выход регистра хранения с оптимальным коэффициентом усиления К31 подсоединен к первому входу седьмого устройства умножения, выход которого соединен с вторым суммирующим входом шестого сумматора, к выходу шестого сумматора подключен второй суммирующий вход пятого сумматора, выход ИНС с данными скорости Vζ соединен с вторым входом шестого устройства умножения, к выходу которого подключен первый суммирующий вход седьмого сумматора, выход ИНС с данными скорости Vξ подключен к первому входу восьмого устройства умножения, выход которого соединен с вторым суммирующим входом седьмого сумматора, выход седьмого сумматора подсоединен к вычитающему входу третьего сумматора, к выходу которого подключен первый суммирующий вход восьмого сумматора, к вторым входам четвертого, пятого и седьмого устройств умножения подключен выход второго сумматора в вычислительном устройстве формирования оценок в продольном канале ГП, выход ИНС с данными скорости Vζ подсоединен к первому входу девятого устройства умножения, к второму входу которого подключен выход навигационного вычислителя с данными скорости Uζ, выход девятого устройства умножения соединен с первым входом десятого устройства умножения, второй вход которого подсоединен к выходу ФИО с оценкой угла рассогласования , выход десятого устройства умножения подключен к первому суммирующему входу девятого сумматора, к выходу которого подсоединен вычитающий вход восьмого сумматора, выход навигационного вычислителя с данными скорости Uξ подключен к первому входу одиннадцатого устройства умножения, выход которого подключен к второму суммирующему входу девятого сумматора, выход ИНС с данными скорости Vη подсоединен к первому входу двенадцатого устройства умножения, а к его второму входу подключен выход навигационного вычислителя с данными угловой скорости ωζ, выход двенадцатого устройства умножения соединен с первым суммирующим входом десятого сумматора, к второму суммирующему входу которого подключен выход навигационного вычислителя с данными проекции gζ вектора ускорения свободного падения, к выходу десятого сумматора подключен первый вход тринадцатого устройства умножения, к второму входу которого подсоединен выход ФИО с оценкой угла рассогласования
, выход регистра хранения с оптимальным коэффициентом усиления К32 соединен с вторым входом второго устройства умножения, к выходу которого подсоединен первый суммирующий вход шестого сумматора, выход регистра хранения с оптимальным коэффициентом усиления К31 подсоединен к первому входу седьмого устройства умножения, выход которого соединен с вторым суммирующим входом шестого сумматора, к выходу шестого сумматора подключен второй суммирующий вход пятого сумматора, выход ИНС с данными скорости Vζ соединен с вторым входом шестого устройства умножения, к выходу которого подключен первый суммирующий вход седьмого сумматора, выход ИНС с данными скорости Vξ подключен к первому входу восьмого устройства умножения, выход которого соединен с вторым суммирующим входом седьмого сумматора, выход седьмого сумматора подсоединен к вычитающему входу третьего сумматора, к выходу которого подключен первый суммирующий вход восьмого сумматора, к вторым входам четвертого, пятого и седьмого устройств умножения подключен выход второго сумматора в вычислительном устройстве формирования оценок в продольном канале ГП, выход ИНС с данными скорости Vζ подсоединен к первому входу девятого устройства умножения, к второму входу которого подключен выход навигационного вычислителя с данными скорости Uζ, выход девятого устройства умножения соединен с первым входом десятого устройства умножения, второй вход которого подсоединен к выходу ФИО с оценкой угла рассогласования , выход десятого устройства умножения подключен к первому суммирующему входу девятого сумматора, к выходу которого подсоединен вычитающий вход восьмого сумматора, выход навигационного вычислителя с данными скорости Uξ подключен к первому входу одиннадцатого устройства умножения, выход которого подключен к второму суммирующему входу девятого сумматора, выход ИНС с данными скорости Vη подсоединен к первому входу двенадцатого устройства умножения, а к его второму входу подключен выход навигационного вычислителя с данными угловой скорости ωζ, выход двенадцатого устройства умножения соединен с первым суммирующим входом десятого сумматора, к второму суммирующему входу которого подключен выход навигационного вычислителя с данными проекции gζ вектора ускорения свободного падения, к выходу десятого сумматора подключен первый вход тринадцатого устройства умножения, к второму входу которого подсоединен выход ФИО с оценкой угла рассогласования  , выход тринадцатого устройства умножения подсоединен к второму суммирующему входу восьмого сумматора, выход которого соединен с входом второго интегратора, выход второго интегратора подключен к суммирующему входу одиннадцатого сумматора и к первому входу первого устройства деления и является выходом ФИО с оценкой погрешности скорости
, выход тринадцатого устройства умножения подсоединен к второму суммирующему входу восьмого сумматора, выход которого соединен с входом второго интегратора, выход второго интегратора подключен к суммирующему входу одиннадцатого сумматора и к первому входу первого устройства деления и является выходом ФИО с оценкой погрешности скорости  , выход ИНС с данными скорости Vξ подключен к первому входу четырнадцатого устройства умножения, к выходу которого подсоединен вычитающий вход одиннадцатого сумматора, выход одиннадцатого сумматора подсоединен к первому суммирующему входу двенадцатого сумматора, второй суммирующий вход которого подключен к выходу пятнадцатого устройства умножения, выход ИНС с данными скорости Vζ подсоединен к первому входу пятнадцатого устройства умножения, к его второму входу подсоединен выход ФИО с оценкой угла рассогласования , выход двенадцатого сумматора подключен к вычитающему входу второго сумматора, выход навигационного вычислителя с данными угловой скорости Uζ соединен с первым входом шестнадцатого устройства умножения, а к его второму входу подсоединен выход ФИО с оценкой угла рассогласования , выход шестнадцатого устройства умножения подключен к первому суммирующему входу тринадцатого сумматора, к вычитающему входу которого подключен выход первого устройства деления, выход ИНС с данными скорости Vζ подсоединен к первому входу второго устройства деления, выход которого подключен к суммирующему входу четырнадцатого сумматора, вычитающий вход четырнадцатого сумматора соединен с выходом навигационного вычислителя с данными угловой скорости ωη, выход четырнадцатого сумматора подключен к первому входу семнадцатого устройства умножения, к выходу которого подсоединен второй суммирующий вход тринадцатого сумматора, к выходу тринадцатого сумматора подключен первый суммирующий вход пятнадцатого сумматора, к второму суммирующему входу которого подсоединен выход пятого сумматора, первый вход третьего устройства деления соединен с выходом ИНС с данными скорости Vζ, выход третьего устройства деления подключен к вычитающему входу пятнадцатого сумматора, выход которого соединен с входом третьего интегратора, выход третьего интегратора предназначен для выхода ФИО с оценкой угла рассогласования , к вторым входам первого, второго и третьего устройств деления подключен выход навигационного вычислителя с данными радиуса кривизны Rη земного эллипсоида, выход второго интегратора подключен к второму входу шестнадцатого устройства умножения в вычислительном устройстве формирования оценок в продольном канале ГП, к второму входу одиннадцатого устройства умножения подсоединен выход второго интегратора в вычислительном устройстве формирования оценок в продольном канале ГП; в вычислительном устройстве формирования оценок в азимутальном канале ГП выполнены четыре сумматора, шесть устройств умножения, два интегратора, выход регистра хранения с оптимальным коэффициентом усиления К51 подключен к первому входу первого устройства умножения, выход которого соединен с первым суммирующим входом первого сумматора, к выходу регистра хранения с оптимальным коэффициентом усиления К52 подсоединен первый вход второго устройства умножения, выход которого соединен с вторым суммирующим входом первого сумматора, выход навигационного вычислителя с данными угловой скорости ωζ подключен к первому входу третьего устройства умножения, к второму входу которого подсоединен выход ФИО с оценкой угла рассогласования , выход третьего устройства умножения соединен с вычитающим входом второго сумматора, к суммирующему входу которого подсоединен выход первого сумматора, выход регистра хранения с оптимальным коэффициентом усиления K81 подсоединен к первому входу четвертого устройства умножения, выход которого подключен к первому суммирующему входу третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления К82 подключен к первому входу пятого устройства умножения, выход которого соединен с вторым суммирующим входом третьего сумматора, к выходу третьего сумматора подключен вход первого интегратора, выход которого соединен с первым суммирующим входом четвертого сумматора и является выходом ФИО с оценкой скорости дрейфа , выход навигационного вычислителя с данными угловой скорости ωη подсоединен к первому входу шестого устройства умножения, к второму входу которого подключен выход ФИО с оценкой угла рассогласования , выход второго сумматора подключен к второму суммирующему входу четвертого сумматора, третий суммирующий вход которого соединен с выходом шестого устройства умножения, выход четвертого сумматора соединен с входом второго интегратора, выход которого является выходом ФИО с оценкой угла рассогласования
, выход ИНС с данными скорости Vξ подключен к первому входу четырнадцатого устройства умножения, к выходу которого подсоединен вычитающий вход одиннадцатого сумматора, выход одиннадцатого сумматора подсоединен к первому суммирующему входу двенадцатого сумматора, второй суммирующий вход которого подключен к выходу пятнадцатого устройства умножения, выход ИНС с данными скорости Vζ подсоединен к первому входу пятнадцатого устройства умножения, к его второму входу подсоединен выход ФИО с оценкой угла рассогласования , выход двенадцатого сумматора подключен к вычитающему входу второго сумматора, выход навигационного вычислителя с данными угловой скорости Uζ соединен с первым входом шестнадцатого устройства умножения, а к его второму входу подсоединен выход ФИО с оценкой угла рассогласования , выход шестнадцатого устройства умножения подключен к первому суммирующему входу тринадцатого сумматора, к вычитающему входу которого подключен выход первого устройства деления, выход ИНС с данными скорости Vζ подсоединен к первому входу второго устройства деления, выход которого подключен к суммирующему входу четырнадцатого сумматора, вычитающий вход четырнадцатого сумматора соединен с выходом навигационного вычислителя с данными угловой скорости ωη, выход четырнадцатого сумматора подключен к первому входу семнадцатого устройства умножения, к выходу которого подсоединен второй суммирующий вход тринадцатого сумматора, к выходу тринадцатого сумматора подключен первый суммирующий вход пятнадцатого сумматора, к второму суммирующему входу которого подсоединен выход пятого сумматора, первый вход третьего устройства деления соединен с выходом ИНС с данными скорости Vζ, выход третьего устройства деления подключен к вычитающему входу пятнадцатого сумматора, выход которого соединен с входом третьего интегратора, выход третьего интегратора предназначен для выхода ФИО с оценкой угла рассогласования , к вторым входам первого, второго и третьего устройств деления подключен выход навигационного вычислителя с данными радиуса кривизны Rη земного эллипсоида, выход второго интегратора подключен к второму входу шестнадцатого устройства умножения в вычислительном устройстве формирования оценок в продольном канале ГП, к второму входу одиннадцатого устройства умножения подсоединен выход второго интегратора в вычислительном устройстве формирования оценок в продольном канале ГП; в вычислительном устройстве формирования оценок в азимутальном канале ГП выполнены четыре сумматора, шесть устройств умножения, два интегратора, выход регистра хранения с оптимальным коэффициентом усиления К51 подключен к первому входу первого устройства умножения, выход которого соединен с первым суммирующим входом первого сумматора, к выходу регистра хранения с оптимальным коэффициентом усиления К52 подсоединен первый вход второго устройства умножения, выход которого соединен с вторым суммирующим входом первого сумматора, выход навигационного вычислителя с данными угловой скорости ωζ подключен к первому входу третьего устройства умножения, к второму входу которого подсоединен выход ФИО с оценкой угла рассогласования , выход третьего устройства умножения соединен с вычитающим входом второго сумматора, к суммирующему входу которого подсоединен выход первого сумматора, выход регистра хранения с оптимальным коэффициентом усиления K81 подсоединен к первому входу четвертого устройства умножения, выход которого подключен к первому суммирующему входу третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления К82 подключен к первому входу пятого устройства умножения, выход которого соединен с вторым суммирующим входом третьего сумматора, к выходу третьего сумматора подключен вход первого интегратора, выход которого соединен с первым суммирующим входом четвертого сумматора и является выходом ФИО с оценкой скорости дрейфа , выход навигационного вычислителя с данными угловой скорости ωη подсоединен к первому входу шестого устройства умножения, к второму входу которого подключен выход ФИО с оценкой угла рассогласования , выход второго сумматора подключен к второму суммирующему входу четвертого сумматора, третий суммирующий вход которого соединен с выходом шестого устройства умножения, выход четвертого сумматора соединен с входом второго интегратора, выход которого является выходом ФИО с оценкой угла рассогласования  , к вторым входам второго и пятого устройств умножения подсоединен выход второго сумматора в вычислительном устройстве формирования оценок в боковом канале ГП, к вторым входам первого и четвертого устройств умножения подключен выход второго сумматора в вычислительном устройстве формирования оценок в продольном канале ГП, выход первого интегратора соединен с вторым входом семнадцатого устройства умножения в вычислительном устройстве формирования оценок в продольном канале ГП, вторым входом восьмого устройства умножения в вычислительном устройстве формирования оценок в боковом канале ГП, выход второго интегратора подключен к вторым входам пятого и четырнадцатого устройств умножения в вычислительном устройстве формирования оценок в продольном канале ГП и вторым входам четырнадцатого и семнадцатого устройств умножения в вычислительном устройстве формирования оценок в боковом канале ГП; в вычислительном устройстве для преобразования измеренных с помощью источника сигналов коррекции ИНС скоростей Wx, Wy, Wz в проекции на оси опорного трехгранника ГП VξK, VηK выполнены десять сумматоров и двадцать одно устройство умножения, к первому входу первого устройства умножения подключен выход вычислительного устройства тригонометрических функций с данными cosφ, выход ПЗУ с данными угловой скорости U Земли подсоединен к второму входу первого устройства умножения, к выходу которого подключен первый вход второго устройства умножения, выход вычислительного устройства с данными радиуса кривизны параллели RE подсоединен к второму входу второго устройства умножения, выход которого подсоединен к первым входам третьего и четвертого устройств умножения, выход вычислительного устройства тригонометрических функций с данными sinχ подключен к второму входу третьего устройства умножения, к выходу которого подсоединен первый суммирующий вход первого сумматора, к первым входам пятого, шестого и седьмого устройств умножения подсоединен выход вычислительного устройства тригонометрических функций с данными cosψГ, выход вычислительного устройства тригонометрических функций с данными cosυ и подсоединен к второму входу пятого устройства умножения, выход пятого устройства умножения соединен с первым входом восьмого устройства умножения, выход которого подключен к второму суммирующему входу первого сумматора, выход источника сигналов коррекции ИНС с данными скорости Wx подключен к второму входу восьмого устройства умножения и к первому входу девятого устройства умножения, к выходу вычислительного устройства тригонометрических функций с данными sinυ и подсоединены второй вход шестого устройства умножения и первый вход десятого устройства умножения, выход шестого устройства умножения соединен с первыми входами одиннадцатого, двенадцатого и тринадцатого устройств умножения, выход одиннадцатого устройства умножения подключен к первому суммирующему входу второго сумматора, к выходу которого подсоединен первый вход четырнадцатого устройства умножения, выход вычислительного устройства тригонометрических функций с данными cosγ подключен к вторым входам седьмого и одиннадцатого устройств умножения, к первым входам пятнадцатого и шестнадцатого устройств умножения, к второму входу четырнадцатого устройства умножения и к первому входу семнадцатого устройства умножения подсоединен выход источника сигналов коррекции ИНС с данными скорости Wy, выход четырнадцатого устройства умножения подключен к вычитающему входу третьего сумматора, к суммирующему входу которого подсоединен выход первого сумматора, выход вычислительного устройства тригонометрических функций с данными sinψГ подсоединен к первому входу восемнадцатого устройства умножения и к вторым входам десятого и шестнадцатого устройств умножения, к выходу вычислительного устройства тригонометрических функций с данными sinγ подсоединены первый вход девятнадцатого устройства умножения и вторые входы двенадцатого, тринадцатого и восемнадцатого устройств умножения, к выходу восемнадцатого устройства умножения подключен второй суммирующий вход второго сумматора, выход десятого устройства умножения подсоединен к вторым входам девятого, пятнадцатого и девятнадцатого устройств умножения, выход вычислительного устройства тригонометрических функций с данными cosχ подключен к второму входу четвертого устройства умножения, выход которого соединен с суммирующим входом четвертого сумматора, к вычитающему входу которого подсоединен выход девятого устройства умножения, к выходу пятнадцатого устройства умножения подсоединен суммирующий вход пятого сумматора, вычитающий вход которого подключен к выходу двенадцатого устройства умножения, выход пятого сумматора соединен с вторым входом семнадцатого устройства умножения, выход которого подключен к первому суммирующему входу шестого сумматора, второй суммирующий вход которого соединен с выходом четвертого сумматора, к первым входам двадцатого и двадцать первого устройств умножения подсоединен выход источника сигналов коррекции ИНС с данными скорости Wz, к выходу тринадцатого устройства умножения подключен суммирующий вход седьмого сумматора, а его вычитающий вход соединен с выходом шестнадцатого устройства умножения, выход седьмого сумматора подсоединен к второму входу двадцатого устройства умножения, выход которого подключен к первому суммирующему входу восьмого сумматора, к выходу третьего сумматора подключен второй суммирующий вход восьмого сумматора, выход которого является выходом навигационного вычислителя с данными скорости VζK, выход девятнадцатого устройства умножения соединен с первым суммирующим входом девятого сумматора, к второму суммирующему входу которого подключен выход седьмого устройства умножения, выход девятого сумматора подсоединен к второму входу двадцать первого устройства умножения, выход которого подключен к вычитающему входу десятого сумматора, выход шестого сумматора подключен к суммирующему входу десятого сумматора, выход которого является выходом навигационного вычислителя с данными скорости VηK; вычислитель поправок выполнен в составе вычислительного устройства тригонометрических функций с подключенными к его входам выходами навигационного вычислителя с данными азимута χ и географической долготы φ, семи сумматоров, шестнадцати устройств умножения, устройства деления, трех пороговых устройств, трех ключей, генератора пилообразных колебаний, трех аналогово-цифровых преобразователей (АЦП), выход ФИО с оценкой угла рассогласования
, к вторым входам второго и пятого устройств умножения подсоединен выход второго сумматора в вычислительном устройстве формирования оценок в боковом канале ГП, к вторым входам первого и четвертого устройств умножения подключен выход второго сумматора в вычислительном устройстве формирования оценок в продольном канале ГП, выход первого интегратора соединен с вторым входом семнадцатого устройства умножения в вычислительном устройстве формирования оценок в продольном канале ГП, вторым входом восьмого устройства умножения в вычислительном устройстве формирования оценок в боковом канале ГП, выход второго интегратора подключен к вторым входам пятого и четырнадцатого устройств умножения в вычислительном устройстве формирования оценок в продольном канале ГП и вторым входам четырнадцатого и семнадцатого устройств умножения в вычислительном устройстве формирования оценок в боковом канале ГП; в вычислительном устройстве для преобразования измеренных с помощью источника сигналов коррекции ИНС скоростей Wx, Wy, Wz в проекции на оси опорного трехгранника ГП VξK, VηK выполнены десять сумматоров и двадцать одно устройство умножения, к первому входу первого устройства умножения подключен выход вычислительного устройства тригонометрических функций с данными cosφ, выход ПЗУ с данными угловой скорости U Земли подсоединен к второму входу первого устройства умножения, к выходу которого подключен первый вход второго устройства умножения, выход вычислительного устройства с данными радиуса кривизны параллели RE подсоединен к второму входу второго устройства умножения, выход которого подсоединен к первым входам третьего и четвертого устройств умножения, выход вычислительного устройства тригонометрических функций с данными sinχ подключен к второму входу третьего устройства умножения, к выходу которого подсоединен первый суммирующий вход первого сумматора, к первым входам пятого, шестого и седьмого устройств умножения подсоединен выход вычислительного устройства тригонометрических функций с данными cosψГ, выход вычислительного устройства тригонометрических функций с данными cosυ и подсоединен к второму входу пятого устройства умножения, выход пятого устройства умножения соединен с первым входом восьмого устройства умножения, выход которого подключен к второму суммирующему входу первого сумматора, выход источника сигналов коррекции ИНС с данными скорости Wx подключен к второму входу восьмого устройства умножения и к первому входу девятого устройства умножения, к выходу вычислительного устройства тригонометрических функций с данными sinυ и подсоединены второй вход шестого устройства умножения и первый вход десятого устройства умножения, выход шестого устройства умножения соединен с первыми входами одиннадцатого, двенадцатого и тринадцатого устройств умножения, выход одиннадцатого устройства умножения подключен к первому суммирующему входу второго сумматора, к выходу которого подсоединен первый вход четырнадцатого устройства умножения, выход вычислительного устройства тригонометрических функций с данными cosγ подключен к вторым входам седьмого и одиннадцатого устройств умножения, к первым входам пятнадцатого и шестнадцатого устройств умножения, к второму входу четырнадцатого устройства умножения и к первому входу семнадцатого устройства умножения подсоединен выход источника сигналов коррекции ИНС с данными скорости Wy, выход четырнадцатого устройства умножения подключен к вычитающему входу третьего сумматора, к суммирующему входу которого подсоединен выход первого сумматора, выход вычислительного устройства тригонометрических функций с данными sinψГ подсоединен к первому входу восемнадцатого устройства умножения и к вторым входам десятого и шестнадцатого устройств умножения, к выходу вычислительного устройства тригонометрических функций с данными sinγ подсоединены первый вход девятнадцатого устройства умножения и вторые входы двенадцатого, тринадцатого и восемнадцатого устройств умножения, к выходу восемнадцатого устройства умножения подключен второй суммирующий вход второго сумматора, выход десятого устройства умножения подсоединен к вторым входам девятого, пятнадцатого и девятнадцатого устройств умножения, выход вычислительного устройства тригонометрических функций с данными cosχ подключен к второму входу четвертого устройства умножения, выход которого соединен с суммирующим входом четвертого сумматора, к вычитающему входу которого подсоединен выход девятого устройства умножения, к выходу пятнадцатого устройства умножения подсоединен суммирующий вход пятого сумматора, вычитающий вход которого подключен к выходу двенадцатого устройства умножения, выход пятого сумматора соединен с вторым входом семнадцатого устройства умножения, выход которого подключен к первому суммирующему входу шестого сумматора, второй суммирующий вход которого соединен с выходом четвертого сумматора, к первым входам двадцатого и двадцать первого устройств умножения подсоединен выход источника сигналов коррекции ИНС с данными скорости Wz, к выходу тринадцатого устройства умножения подключен суммирующий вход седьмого сумматора, а его вычитающий вход соединен с выходом шестнадцатого устройства умножения, выход седьмого сумматора подсоединен к второму входу двадцатого устройства умножения, выход которого подключен к первому суммирующему входу восьмого сумматора, к выходу третьего сумматора подключен второй суммирующий вход восьмого сумматора, выход которого является выходом навигационного вычислителя с данными скорости VζK, выход девятнадцатого устройства умножения соединен с первым суммирующим входом девятого сумматора, к второму суммирующему входу которого подключен выход седьмого устройства умножения, выход девятого сумматора подсоединен к второму входу двадцать первого устройства умножения, выход которого подключен к вычитающему входу десятого сумматора, выход шестого сумматора подключен к суммирующему входу десятого сумматора, выход которого является выходом навигационного вычислителя с данными скорости VηK; вычислитель поправок выполнен в составе вычислительного устройства тригонометрических функций с подключенными к его входам выходами навигационного вычислителя с данными азимута χ и географической долготы φ, семи сумматоров, шестнадцати устройств умножения, устройства деления, трех пороговых устройств, трех ключей, генератора пилообразных колебаний, трех аналогово-цифровых преобразователей (АЦП), выход ФИО с оценкой угла рассогласования  подключен к первым входам первого и второго устройств умножения, выход вычислительного устройства тригонометрических функций с данными cosχ подсоединен к второму входу первого устройства умножения и к первым входам третьего, четвертого и пятого устройств умножения, выход вычислительного устройства тригонометрических функций с данными sinχ подключен к второму входу второго устройства умножения и к первым входам шестого, седьмого и восьмого устройств умножения, выход ФИО с оценкой угла рассогласования
подключен к первым входам первого и второго устройств умножения, выход вычислительного устройства тригонометрических функций с данными cosχ подсоединен к второму входу первого устройства умножения и к первым входам третьего, четвертого и пятого устройств умножения, выход вычислительного устройства тригонометрических функций с данными sinχ подключен к второму входу второго устройства умножения и к первым входам шестого, седьмого и восьмого устройств умножения, выход ФИО с оценкой угла рассогласования  подсоединен к вторым входам третьего и шестого устройств умножения, выход шестого устройства умножения соединен с вычитающим входом первого сумматора, выход ФИО с оценкой скорости дрейфа
подсоединен к вторым входам третьего и шестого устройств умножения, выход шестого устройства умножения соединен с вычитающим входом первого сумматора, выход ФИО с оценкой скорости дрейфа  подключен к вторым входам пятого и седьмого устройств умножения, выход ФИО с оценкой скорости дрейфа
подключен к вторым входам пятого и седьмого устройств умножения, выход ФИО с оценкой скорости дрейфа  подсоединен к вторым входам четвертого и восьмого устройств умножения, к выходу седьмого устройства умножения подсоединен первый суммирующий вход второго сумматора, второй суммирующий вход которого соединен с выходом четвертого устройства умножения, выход второго сумматора соединен с первым входом девятого устройства умножения, к выходу которого подключен вычитающий вход третьего сумматора, выход генератора пилообразных колебаний подключен к входам первого, второго и третьего ключей, к выходу первого ключа подсоединен вход первого порогового устройства, выход которого соединен с входом первого АЦП, второй вход девятого устройства умножения соединен с выходом первого АЦП, выход второго устройства умножения подключен к первому суммирующему входу четвертого сумматора, второй суммирующий вход которого соединен с выходом третьего устройства умножения, к выходу вычислительного устройства тригонометрических функций с данными cosφ подсоединен вход устройства деления, к выходу которого подключены первые входы десятого, одиннадцатого и двенадцатого устройства умножения, выход восьмого устройства умножения соединен с вычитающим входом пятого сумматора, суммирующий вход которого подключен к выходу пятого устройства умножения, к выходу второго ключа подсоединен вход второго порогового устройства, к выходу которого подключен вход АЦП, к первому входу тринадцатого устройства умножения подсоединен выход второго АЦП, выход пятого сумматора соединен с вторым входом одиннадцатого устройства умножения, выход которого подсоединен к второму входу тринадцатого устройства умножения, к выходу тринадцатого устройства умножения подключен вычитающий вход шестого сумматора, суммирующий вход которого подсоединен к выходу десятого устройства умножения, к первому суммирующем входу седьмого сумматора подсоединен выход шестого сумматора, выход третьего ключа подключен к входу третьего порогового устройства, выход которого соединен с входом третьего АЦП, к выходу третьего АЦП подсоединен второй вход двенадцатого устройства умножения, к выходу которого подключен первый вход четырнадцатого устройства умножения, выход навигационного вычислителя с данными угловой скорости UN соединен с вторым входом четырнадцатого устройства умножения, выход которого подсоединен с первым входом пятнадцатого устройства умножения, выход вычислительного устройства тригонометрических функций с данными tgφ подключен к второму входу пятнадцатого устройства умножения, к первому входу шестнадцатого устройства умножения подсоединен выход пятнадцатого устройства умножения, выход третьего сумматора подключен к второму входу шестнадцатого устройства умножения и является выходом значения коррекции географической широты, к выходу шестнадцатого устройства умножения подсоединен второй суммирующий вход седьмого сумматора, выход которого является выходом значения коррекции географической долготы; в устройстве коррекции в навигационном вычислителе выполнены первый и второй сумматоры, выход вычислительного устройства с данными счисленной широты подключен к суммирующему входу первого сумматора, а к его вычитающему входу подсоединен выход третьего сумматора в вычислителе поправок, выход первого сумматора является выходом откорректированного значения географической широты, выход вычислительного устройства с данными счисленной долготы подсоединен к суммирующему входу второго сумматора, к вычитающему входу которого подключен выход седьмого сумматора вычислителя поправок, выход второго сумматора является выходом откорректированного значения географической долготы.
подсоединен к вторым входам четвертого и восьмого устройств умножения, к выходу седьмого устройства умножения подсоединен первый суммирующий вход второго сумматора, второй суммирующий вход которого соединен с выходом четвертого устройства умножения, выход второго сумматора соединен с первым входом девятого устройства умножения, к выходу которого подключен вычитающий вход третьего сумматора, выход генератора пилообразных колебаний подключен к входам первого, второго и третьего ключей, к выходу первого ключа подсоединен вход первого порогового устройства, выход которого соединен с входом первого АЦП, второй вход девятого устройства умножения соединен с выходом первого АЦП, выход второго устройства умножения подключен к первому суммирующему входу четвертого сумматора, второй суммирующий вход которого соединен с выходом третьего устройства умножения, к выходу вычислительного устройства тригонометрических функций с данными cosφ подсоединен вход устройства деления, к выходу которого подключены первые входы десятого, одиннадцатого и двенадцатого устройства умножения, выход восьмого устройства умножения соединен с вычитающим входом пятого сумматора, суммирующий вход которого подключен к выходу пятого устройства умножения, к выходу второго ключа подсоединен вход второго порогового устройства, к выходу которого подключен вход АЦП, к первому входу тринадцатого устройства умножения подсоединен выход второго АЦП, выход пятого сумматора соединен с вторым входом одиннадцатого устройства умножения, выход которого подсоединен к второму входу тринадцатого устройства умножения, к выходу тринадцатого устройства умножения подключен вычитающий вход шестого сумматора, суммирующий вход которого подсоединен к выходу десятого устройства умножения, к первому суммирующем входу седьмого сумматора подсоединен выход шестого сумматора, выход третьего ключа подключен к входу третьего порогового устройства, выход которого соединен с входом третьего АЦП, к выходу третьего АЦП подсоединен второй вход двенадцатого устройства умножения, к выходу которого подключен первый вход четырнадцатого устройства умножения, выход навигационного вычислителя с данными угловой скорости UN соединен с вторым входом четырнадцатого устройства умножения, выход которого подсоединен с первым входом пятнадцатого устройства умножения, выход вычислительного устройства тригонометрических функций с данными tgφ подключен к второму входу пятнадцатого устройства умножения, к первому входу шестнадцатого устройства умножения подсоединен выход пятнадцатого устройства умножения, выход третьего сумматора подключен к второму входу шестнадцатого устройства умножения и является выходом значения коррекции географической широты, к выходу шестнадцатого устройства умножения подсоединен второй суммирующий вход седьмого сумматора, выход которого является выходом значения коррекции географической долготы; в устройстве коррекции в навигационном вычислителе выполнены первый и второй сумматоры, выход вычислительного устройства с данными счисленной широты подключен к суммирующему входу первого сумматора, а к его вычитающему входу подсоединен выход третьего сумматора в вычислителе поправок, выход первого сумматора является выходом откорректированного значения географической широты, выход вычислительного устройства с данными счисленной долготы подсоединен к суммирующему входу второго сумматора, к вычитающему входу которого подключен выход седьмого сумматора вычислителя поправок, выход второго сумматора является выходом откорректированного значения географической долготы.
Посредством выполнения в ФИО шестнадцати регистров хранения с данными оптимальных коэффициентов усиления, вычислительного устройства для формирования оценок данных ИНС по продольному каналу ГП на восемнадцати сумматорах, семнадцати устройств умножения, трех интеграторов, вычислительного устройства для формирования оценок данных ИНС в боковом канале ГП на пятнадцати сумматорах, семнадцати устройств умножения, трех устройствах деления, трех интеграторов, вычислительного устройства для формирования оценок ИНС в азимутальном канале ГП в составе четырех сумматоров, шести устройств умножения, двух интеграторов обеспечивается определение погрешностей ГП, необходимых для расчета поправок в счисленные в навигационном вычислителе значения географической широты и географической долготы.
Путем выполнения в навигационном вычислителе вычислительного устройства для преобразования измеренных с помощью источника сигналов коррекции ИНС скоростей по осям X, Y, Z объекта в проекции этих скоростей на оси опорного трехгранника ГП в составе десяти сумматоров, двадцати одного устройства умножения обеспечивается получение сигналов, также необходимых для расчета погрешностей ИНС.
При выполнении вычислителя поправок в составе семи сумматоров, шестнадцати устройств умножения, устройства деления, вычислительного устройства тригонометрических функций, генератора пилообразных колебаний, трех пороговых устройств, трех АЦП, трех ключей обеспечивается вычисление поправок к географической широте и географической долготе.
В результате выполнения в устройстве коррекции в навигационном вычислителе двух сумматоров достигается введение поправки в исчисленные посредством навигационного вычислителя географическую широту и географическую долготу, что обеспечивает устранение погрешности в определении географической широты и географической долготы. Следствием этого является повышение точности определения координат посредством навигационного комплекса.
На фиг.1 представлена структурная схема навигационного комплекса, на фиг.2 - блок-схема вычислительного устройства формирования оценок данных ИНС в продольном канале ГП, на фиг.3 - блок-схема вычислительного устройства формирования оценок данных ИНС в боковом канале ГП, на фиг.4 - блок-схема вычислительного устройства формирования оценок данных ИНС в азимутальном канале ГП, на фиг.5 - блок-схема вычислительного устройства для преобразования измеренных с помощью источника сигналов коррекции ИНС скоростей в их проекции на оси опорного трехгранника ГП, на фиг.6 - блок-схема вычислителя поправок, на фиг.7 - блок-схема устройства коррекции в навигационном вычислителе, на фиг.8 - системы координат, связанные с выполнением навигации.
Навигационный комплекс (фиг.1) содержит ИНС 1, источник сигналов коррекции 2 ИНС, навигационный вычислитель 3, ФИО 4, вычислитель поправок 5. ИНС 1 содержит гироплатформу (ГП), на основании которой установлены акселерометры и гироскопы. По каждой из осей ГП установлен синусно-косинусный вращающийся трансформатор (СКВТ) и двигатель стабилизации. В ИНС 1 выполнены преобразователи аналог-код для обработки сигналов акселерометров и СКВТ, преобразователи код-частота для стабилизации и управления ГП. Выходы «а», «б», «в» ИНС 1 соответственно с данными составляющих абсолютных скоростей Vξ, Vη, Vζ в системе координат Oξηζ опорного трехгранника ГП подключены к входам навигационного вычислителя 3. Выходы «а», «б» ИНС 1 также подсоединены к входам ФИО 4. К входам навигационного вычислителя 3 подключены выход «г» ИНС 1 с данными гироскопического курса ψГ, выход «д» с данными угла крена γ, выход «e» с данными угла тангажа ϑ. Выходы «ж», «з», «и» источника сигналов коррекции 2 ИНС с данными соответственно скоростей Wx, Wy, Wz в связанной системе координат объекта подсоединены также к входам навигационного вычислителя 3. Источником сигналов коррекции ИНС могут быть спутниковая навигационная система или доплеровский измеритель скорости сноса (ДИСС), с помощью которых измеряются скорости Wx, Wy, Wz.
В навигационном вычислителе 3 выполнены постоянное запоминающее устройство (ПЗУ) с данными угловой скорости U Земли, константами a, ge, g, e выражения для определения ускорения свободного падения, вычислительные средства для расчета выдаваемых сигналов географической широты φ, географической долготы λ, азимута χ ГП, линейных скоростей Vx, Vy в связанной системе координат объекта, проекций Uξ, Uη, Uζ угловой скорости U Земли на оси опорного трехгранника ГП, северной UN и восточной UЕ составляющих угловой скорости Земли, абсолютных угловых скоростей ωξ, ωη составляющих вектора местного ускорения свободного падения gξ, gη, gζ, радиусов кривизны Rξ, Rη земного эллипсоида по сечениям, проходящим через оси ГП, радиусов кривизны меридиана RN, параллели RE, вспомогательного параметра RO, тригонометрических функций, устройство коррекции, вычислительное устройство для преобразования измеренных с помощью источника сигналов коррекции 2 ИНС скоростей Wx, Wy, Wz в их проекции VξK, VηK на оси опорного трехгранника ГП.
К входам ФИО 4 подключены выход «к» с данными скорости Vx, выход «л» с данными скорости Vy, выход «м» с данными угловой скорости Uζ, выход «н» с данными угловой скорости ωξ, выход «o» с данными угловой скорости ωη, выход «п» с данными проекции gζ вектора ускорения свободного падения, выход «p» с данными радиуса кривизны Rξ, выход «c» с данными радиуса кривизны Rη, выход «т» с данными скорости VξK, выход «у» с данными скорости VηK, выход «ф» с данными азимута χ, выход «х» с данными географической широты φ навигационного вычислителя 3.
Выход «ф» навигационного вычислителя 3, а также выход «ц» с данными угловой скорости UN подсоединены к одним из входов вычислителя поправок 5. К другим входам вычислителя поправок 5 подключены выход «ч» с оценкой угла рассогласования  , выход «ш» с оценкой угла рассогласования
, выход «ш» с оценкой угла рассогласования  , выход «щ» с оценкой скорости дрейфа
, выход «щ» с оценкой скорости дрейфа  , выход «э» ФИО 4 с оценкой скорости дрейфа
, выход «э» ФИО 4 с оценкой скорости дрейфа  . К входам навигационного вычислителя 3 подсоединены выход «ю» со значением поправки географической широты, выход «я» со значением поправки географической долготы вычислителя поправок 5.
. К входам навигационного вычислителя 3 подсоединены выход «ю» со значением поправки географической широты, выход «я» со значением поправки географической долготы вычислителя поправок 5.
В ФИО 4 выполнены шестнадцать регистров хранения, в которых прошиты значения оптимальных коэффициентов усиления К11, К21, К31, К41, К51, К61, К71, К81, К12, К22, К32, К42, К52, К62, К72, К82 соответственно, выполнены вычислительные устройства для формирования в продольном канале ГП оценок погрешности скорости  , угла рассогласования , скорости дрейфа , в боковом канале ГП оценок погрешности скорости
, угла рассогласования , скорости дрейфа , в боковом канале ГП оценок погрешности скорости  , угла рассогласования
, угла рассогласования  , скорости дрейфа
, скорости дрейфа  , в азимутальном канале ГП оценок угла рассогласования
, в азимутальном канале ГП оценок угла рассогласования  , скорости дрейфа
, скорости дрейфа  . В вычислителе поправок 5 выполнены вычислительные устройства для формирования поправок в географическую широту φ и географическую долготу λ.
. В вычислителе поправок 5 выполнены вычислительные устройства для формирования поправок в географическую широту φ и географическую долготу λ.
В вычислительном устройстве для формирования оценок в продольном канале ГП (фиг.2) выход «к» навигационного вычислителя 3 с данными скорости Vx подсоединен к суммирующему входу первого сумматора 6, к вычитающему входу которого подключен выход «т» навигационного вычислителя 3 с данными проекции скорости VξK, к выходу первого сумматора 6 подсоединен суммирующий вход второго сумматора 7, к выходу которого подключены первые входы первого 8, второго 9 и третьего 10 устройств умножения. Выход регистра хранения 11 с оптимальным коэффициентом усиления К71 подсоединен к второму входу первого устройства умножения 8, выход которого подключен к первому суммирующему входу третьего сумматора 12. выход регистра хранения 13 с оптимальным коэффициентом усиления К72 подключен к первому входу четвертого устройства умножения 14, выход которого подсоединен к второму суммирующему входу третьего сумматора 12. Выход третьего сумматора 12 соединен с входом первого интегратора 15, выход «э» которого подключен к первому суммирующему входу четвертого сумматора 16 и является выходом ФИО 4 с оценкой дрейфа . Выход «б» с данными скорости Vη ИНС 1 подсоединен к первому входу пятого устройства умножения 17, выход которого подключен к суммирующему входу пятого сумматора 18, к первому входу шестого устройства умножения 19 подключен выход «а» ИНС 1 с данными скорости Vξ. Выход «ш» ФИО 4 с оценкой угла рассогласования подсоединен к второму входу шестого устройства умножения 19, выход которого подключен к вычитающему входу пятого сумматора 18, выход пятого сумматора 18 подключен к второму суммирующему входу четвертого сумматора 16.
Выход регистра хранения 20 с оптимальным коэффициентом усиления K11 подсоединен к второму входу второго устройства умножения 9, к выходу которого подключен первый суммирующий вход шестого сумматора 21, выход регистра хранения 22 с оптимальным коэффициентом усиления K12 подключен к первому входу седьмого устройства умножения 23, выход которого подключен к второму суммирующему входу шестого сумматора 21. Выход шестого сумматора 21 подсоединен к первому суммирующему входу седьмого сумматора 24, к первому входу восьмого устройства умножения 25 подсоединен выход «б» данных скорости Vη ИНС 1. Выход «о» данных угловой скорости ωη навигационного вычислителя 3 подключен к второму входу восьмого устройства умножения 25, к выходу которого подсоединен первый вход девятого устройства умножения 26, выход «ч» ФИО 4 с оценкой угла рассогласования подключен к второму входу девятого устройства умножения 26, выход которого соединен с вычитающим входом восьмого сумматора 27. Выход восьмого сумматора 27 подключен к второму суммирующему входу седьмого сумматора 24, выход которого подсоединен к суммирующему входу девятого сумматора 28. Выход «а» ИНС 1 с данными скорости Vξ подсоединен к первому входу десятого устройства умножения 29, второй вход которого соединен с выходом «о» навигационного вычислителя 3 с данными угловой скорости ωη, к выходу десятого устройства умножения 29 подключен вычитающий вход десятого сумматора 30, к суммирующему входу которого подсоединен выход «п» навигационного вычислителя 3 с данными проекции gζ вектора ускорения свободного падения. К выходу десятого сумматора 30 подключен вычитающий вход девятого сумматора 28, выход которого соединен с входом второго интегратора 31. Выход второго интегратора 31 соединен с первым суммирующим входом одиннадцатого сумматора 32, первым входом первого устройства деления 33 и является выходом «г1» ФИО 4 оценки погрешности скорости  Выход регистра хранения 34 с оптимальным коэффициентом усиления К41 соединен с вторым входом третьего устройства умножения 10, выход которого соединен с первым суммирующим входом двенадцатого сумматора 35, выход регистра хранения 36 с оптимальным коэффициентом усиления К42 подключен к первому входу одиннадцатого устройства умножения 37, выход которого соединен с вторым суммирующим входом двенадцатого сумматора 35, к выходу которого подключен второй суммирующий вход одиннадцатого сумматора 32. Выход одиннадцатого сумматора 32 соединен с вычитающим входом второго сумматора 7. Выход «р» навигационного вычислителя 3 с данными радиуса кривизны Rξ земного эллипсоида подключен к второму входу первого устройства деления 33, первым входом второго 38 и третьего 39 устройств деления. Выход «а» ИНС 1 с данными скорости Vξ подсоединен к второму входу второго устройства деления 38, выход которого соединен с первым входом двенадцатого устройства умножения 40, а к его второму входу подключен выход «ш» ФИО 4 с оценкой угла рассогласования . Выход двенадцатого устройства умножения 40 подсоединен к вычитающему входу тринадцатого сумматора 41, выход «ч» ФИО 4 с оценкой угла рассогласования подключен к первому входу тринадцатого устройства умножения 42, а к его второму входу подсоединен выход «м» навигационного вычислителя 3 с данными угловой скорости Uζ. Выход тринадцатого устройства умножения 42 подключен к вычитающему входу четырнадцатого сумматора 43, к суммирующему входу которого подсоединен выход четвертого сумматора 16. Выход «б» ИНС 1 с данными скорости Vη подсоединен к второму входу третьего устройства деления 39, к выходу которого подключен первый суммирующий вход пятнадцатого сумматора 44. Выход «м» навигационного вычислителя 3 с данными угловой скорости Uζ подключен к второму суммирующему входу пятнадцатого сумматора 44, выход которого соединен с первым входом четырнадцатого устройства умножения 45. Выход четырнадцатого устройства умножения 45 подключен к первому суммирующему входу тринадцатого сумматора 41, второй суммирующий вход которого соединен с выходом четырнадцатого сумматора 43, выход тринадцатого сумматора 41 подсоединен к первому суммирующему входу шестнадцатого сумматора 46, к второму суммирующему входу которого подключен выход первого устройства деления 33. Выход шестнадцатого сумматора 46 подключен к входу третьего интегратора 47, выход которого подсоединен к вторым входам шестого 19 и двенадцатого 40 устройства умножения и является выходом «ш» ФИО 4 с оценкой угла рассогласования .
Выход регистра хранения 34 с оптимальным коэффициентом усиления К41 соединен с вторым входом третьего устройства умножения 10, выход которого соединен с первым суммирующим входом двенадцатого сумматора 35, выход регистра хранения 36 с оптимальным коэффициентом усиления К42 подключен к первому входу одиннадцатого устройства умножения 37, выход которого соединен с вторым суммирующим входом двенадцатого сумматора 35, к выходу которого подключен второй суммирующий вход одиннадцатого сумматора 32. Выход одиннадцатого сумматора 32 соединен с вычитающим входом второго сумматора 7. Выход «р» навигационного вычислителя 3 с данными радиуса кривизны Rξ земного эллипсоида подключен к второму входу первого устройства деления 33, первым входом второго 38 и третьего 39 устройств деления. Выход «а» ИНС 1 с данными скорости Vξ подсоединен к второму входу второго устройства деления 38, выход которого соединен с первым входом двенадцатого устройства умножения 40, а к его второму входу подключен выход «ш» ФИО 4 с оценкой угла рассогласования . Выход двенадцатого устройства умножения 40 подсоединен к вычитающему входу тринадцатого сумматора 41, выход «ч» ФИО 4 с оценкой угла рассогласования подключен к первому входу тринадцатого устройства умножения 42, а к его второму входу подсоединен выход «м» навигационного вычислителя 3 с данными угловой скорости Uζ. Выход тринадцатого устройства умножения 42 подключен к вычитающему входу четырнадцатого сумматора 43, к суммирующему входу которого подсоединен выход четвертого сумматора 16. Выход «б» ИНС 1 с данными скорости Vη подсоединен к второму входу третьего устройства деления 39, к выходу которого подключен первый суммирующий вход пятнадцатого сумматора 44. Выход «м» навигационного вычислителя 3 с данными угловой скорости Uζ подключен к второму суммирующему входу пятнадцатого сумматора 44, выход которого соединен с первым входом четырнадцатого устройства умножения 45. Выход четырнадцатого устройства умножения 45 подключен к первому суммирующему входу тринадцатого сумматора 41, второй суммирующий вход которого соединен с выходом четырнадцатого сумматора 43, выход тринадцатого сумматора 41 подсоединен к первому суммирующему входу шестнадцатого сумматора 46, к второму суммирующему входу которого подключен выход первого устройства деления 33. Выход шестнадцатого сумматора 46 подключен к входу третьего интегратора 47, выход которого подсоединен к вторым входам шестого 19 и двенадцатого 40 устройства умножения и является выходом «ш» ФИО 4 с оценкой угла рассогласования .
Выход «в» ИНС 1 с данными скорости Vζ соединен с первым входом пятнадцатого устройства умножения 48, к второму входу которого подключен выход «э» ФИО 4 с оценкой скорости дрейфа  , выход «м» навигационного вычислителя 3 с данными угловой скорости Uζ подключен к первому входу шестнадцатого устройства умножения 49, к выходу которого подсоединен первый суммирующий вход семнадцатого сумматора 50. Выход пятнадцатого устройства умножения 48 соединен с вторым суммирующим входом семнадцатого сумматора 50, выход которого подсоединен к суммирующему входу восемнадцатого сумматора 51. Выход «б» ИНС 1 с данными скорости Vη подключен к первому входу семнадцатого устройства умножения 52, к выходу которого подсоединен вычитающий вход восемнадцатого сумматора 51, выход восемнадцатого сумматора 51 подключен к суммирующему входу восьмого сумматора 27.
, выход «м» навигационного вычислителя 3 с данными угловой скорости Uζ подключен к первому входу шестнадцатого устройства умножения 49, к выходу которого подсоединен первый суммирующий вход семнадцатого сумматора 50. Выход пятнадцатого устройства умножения 48 соединен с вторым суммирующим входом семнадцатого сумматора 50, выход которого подсоединен к суммирующему входу восемнадцатого сумматора 51. Выход «б» ИНС 1 с данными скорости Vη подключен к первому входу семнадцатого устройства умножения 52, к выходу которого подсоединен вычитающий вход восемнадцатого сумматора 51, выход восемнадцатого сумматора 51 подключен к суммирующему входу восьмого сумматора 27.
В вычислительном устройстве для формирования оценок в боковом канале ГП (фиг.3) выход «л» навигационного вычислителя 3 с данными скорости Vy подключен к суммирующему входу первого сумматора 53, к вычитающему входу которого подсоединен выход «у» навигационного вычислителя 3 с данными скорости VηK. Выход первого сумматорра 53 подсоединен к суммирующему входу второго сумматора 54, выход «a1» которого соединен с первыми входами первого 55, второго 56 и третьего 57 устройств умножения, с вторыми входами четвертого 14, седьмого 23 и одиннадцатого 37 устройств умножения в вычислительном устройстве формирования оценок в продольном канале ГП. Выход регистра хранения 58 с оптимальным коэффициентом усиления К22 подключен к второму входу первого устройства умножения 55, к выходу которого подсоединен первый суммирующий вход третьего сумматора 59, выход регистра хранения 60 с оптимальным коэффициентом усиления К21 соединен с первым входом четвертого устройства умножения 61, выход которого подключен к второму суммирующему входу третьего сумматора 59, выход регистра хранения 62 с оптимальным коэффициентом усиления K62 подключен к второму входу третьего устройства умножения 57, выход которого соединен с первым суммирующим входом четвертого сумматора 63. К выходу регистра хранения 64 с оптимальным коэффициентом усиления K61 подсоединен первый вход пятого устройства умножения 65, к выходу которого подключен второй суммирующий вход четвертого сумматора 63, выход четвертого сумматора 63 подключен к входу первого интегратора 66, выход которого подключен к первым входам пятого сумматора 67 и шестого устройства умножения 68 и является выходом «щ» ФИО 4 с оценкой скорости дрейфа. Выход регистра хранения 69 с оптимальным коэффициентом усиления К32 соединен с вторым входом второго устройства умножения 56, к выходу которого подсоединен первый суммирующий вход шестого сумматора 70. Выход регистра хранения 71 с оптимальным коэффициентом усиления К31 подсоединен к первому входу седьмого устройства умножения 72, выход которого соединен с вторым суммирующим входом шестого сумматора 70, к выходу шестого сумматора 70 подключен второй суммирующий вход пятого сумматора 67. Выход «в» ИНС 1 с данными скорости Vζ соединен с вторым входом шестого устройства умножения 68, к выходу которого подключен первый суммирующий вход седьмого сумматора 73. Выход «а» ИНС 1 с данными скорости Vξ подключен к первому входу восьмого устройства умножения 74, выход которого соединен с вторым суммирующим входом седьмого сумматора 73, выход седьмого сумматора 73 подсоединен к вычитающему входу третьего сумматора 59, к выходу которого подключен первый суммирующий вход восьмого сумматора 75. К вторым входам четвертого 61, пятого 65 и седьмого 72 устройств умножения подключен выход «б1» второго сумматора 7 в вычислительном устройстве формирования оценок по продольному каналу ГП. Выход «в» ИНС 1 с данными скорости Vζ подсоединен к первому входу девятого устройства умножения 76, к второму входу которого подключен выход «м» навигационного вычислителя 3 с данными скорости Uζ, выход девятого устройства умножения 76 соединен с первым входом десятого устройства умножения 77, второй вход которого подсоединен к выходу «ш» ФИО 4 с оценкой угла рассогласования  , выход десятого устройства умножения 77 подключен к первому суммирующему входу девятого сумматора 78, к выходу которого подсоединен вычитающий вход восьмого сумматора 75. Выход «м» навигационного вычислителя 3 с данными скорости Uζ подключен к первому входу одиннадцатого устройства умножения 79, выход которого подключен к второму суммирующему входу девятого сумматора 78. Выход «б» ИНС 1 с данными скорости Vη, подсоединен к первому входу двенадцатого устройства умножения 80, а к его второму входу подключен выход «н» навигационного вычислителя 3 с данными угловой скорости ωζ, выход двенадцатого устройства умножения 80 соединен с первым суммирующим входом десятого сумматора 81, к второму суммирующему входу которого подключен выход «п» навигационного вычислителя 3 с данными проекции gζ вектора ускорения свободного падения. К выходу десятого сумматора 81 подключен первый вход тринадцатого устройства умножения 82, к второму входу которого подсоединен выход «ч» ФИО 4 с оценкой угла рассогласования
, выход десятого устройства умножения 77 подключен к первому суммирующему входу девятого сумматора 78, к выходу которого подсоединен вычитающий вход восьмого сумматора 75. Выход «м» навигационного вычислителя 3 с данными скорости Uζ подключен к первому входу одиннадцатого устройства умножения 79, выход которого подключен к второму суммирующему входу девятого сумматора 78. Выход «б» ИНС 1 с данными скорости Vη, подсоединен к первому входу двенадцатого устройства умножения 80, а к его второму входу подключен выход «н» навигационного вычислителя 3 с данными угловой скорости ωζ, выход двенадцатого устройства умножения 80 соединен с первым суммирующим входом десятого сумматора 81, к второму суммирующему входу которого подключен выход «п» навигационного вычислителя 3 с данными проекции gζ вектора ускорения свободного падения. К выходу десятого сумматора 81 подключен первый вход тринадцатого устройства умножения 82, к второму входу которого подсоединен выход «ч» ФИО 4 с оценкой угла рассогласования  . Выход тринадцатого устройства умножения 82 подсоединен к второму суммирующему входу восьмого сумматора 75, выход которого соединен с входом второго интегратора 83, выход второго интегратора 83 подключен к суммирующему входу одиннадцатого сумматора 84 и к первому входу первого устройства деления 85 и является выходом «в1» ФИО 4 с оценкой погрешности скорости
. Выход тринадцатого устройства умножения 82 подсоединен к второму суммирующему входу восьмого сумматора 75, выход которого соединен с входом второго интегратора 83, выход второго интегратора 83 подключен к суммирующему входу одиннадцатого сумматора 84 и к первому входу первого устройства деления 85 и является выходом «в1» ФИО 4 с оценкой погрешности скорости  Выход «а» ИНС 1 с данными скорости Vξ подключен к первому входу четырнадцатого устройства умножения 86, к выходу которого подсоединен вычитающий вход одиннадцатого сумматора 84. Выход одиннадцатого сумматора 84 подсоединен к первому суммирующему входу двенадцатого сумматора 87, второй суммирующий вход которого подключен к выходу пятнадцатого устройства умножения 88. Выход «в» ИНС 1 с данными скорости Vζ подсоединен к первому входу пятнадцатого устройства умножения 88, к его второму входу подсоединен выход «ч» ФИО 4 с оценкой угла рассогласования . Выход двенадцатого сумматора 87 подключен к вычитающему входу второго сумматора 54. Выход «м» навигационного вычислителя 3 с данными угловой скорости Uζ соединен с первым входом шестнадцатого устройства умножения 89, а к его второму входу подсоединен выход «ш» ФИО 4 с оценкой угла рассогласования
Выход «а» ИНС 1 с данными скорости Vξ подключен к первому входу четырнадцатого устройства умножения 86, к выходу которого подсоединен вычитающий вход одиннадцатого сумматора 84. Выход одиннадцатого сумматора 84 подсоединен к первому суммирующему входу двенадцатого сумматора 87, второй суммирующий вход которого подключен к выходу пятнадцатого устройства умножения 88. Выход «в» ИНС 1 с данными скорости Vζ подсоединен к первому входу пятнадцатого устройства умножения 88, к его второму входу подсоединен выход «ч» ФИО 4 с оценкой угла рассогласования . Выход двенадцатого сумматора 87 подключен к вычитающему входу второго сумматора 54. Выход «м» навигационного вычислителя 3 с данными угловой скорости Uζ соединен с первым входом шестнадцатого устройства умножения 89, а к его второму входу подсоединен выход «ш» ФИО 4 с оценкой угла рассогласования  . Выход шестнадцатого устройства умножения 89 подключен к первому суммирующему входу тринадцатого сумматора 90, к вычитающему входу которого подключен выход первого устройства деления 85. Выход «а» ИНС 1 с данными скорости Vξ подсоединен к первому входу второго устройства деления 91, выход которого подключен к суммирующему входу четырнадцатого сумматора 92, вычитающий вход четырнадцатого сумматора 92 соединен с выходом «о» навигационного вычислителя 3 с данными угловой скорости ωη. Выход четырнадцатого сумматора 92 подключен к первому входу семнадцатого устройства умножения 93, к выходу которого подсоединен второй суммирующий вход тринадцатого сумматора 90, к выходу тринадцатого сумматора 90 подключен первый суммирующий вход пятнадцатого сумматора 94, к второму суммирующему входу которого подсоединен выход пятого сумматора 67. Первый вход третьего устройства деления 95 соединен с выходом «в» ИНС 1 с данными скорости Vζ, выход третьего устройства деления 95 подключен к вычитающему входу пятнадцатого сумматора 94, выход которого соединен с входом третьего интегратора 96. Выход третьего интегратора 96 предназначен для выхода «ч» ФИО 4 с оценкой угла рассогласования . К вторым входам первого 85, второго 91 и третьего 95 устройств деления подключен выход «с» навигационного вычислителя 3 с данными радиуса кривизны Rη земного эллипсоида. Выход «в1» второго интегратора 83 подключен к второму входу шестнадцатого устройства умножения 49 в вычислительном устройстве формирования оценок в продольном канале ГП, к второму входу одиннадцатого устройства умножения 79 подсоединен выход «г1» второго интегратора 31 в вычислительном устройстве формирования оценок в продольном канале ГП.
. Выход шестнадцатого устройства умножения 89 подключен к первому суммирующему входу тринадцатого сумматора 90, к вычитающему входу которого подключен выход первого устройства деления 85. Выход «а» ИНС 1 с данными скорости Vξ подсоединен к первому входу второго устройства деления 91, выход которого подключен к суммирующему входу четырнадцатого сумматора 92, вычитающий вход четырнадцатого сумматора 92 соединен с выходом «о» навигационного вычислителя 3 с данными угловой скорости ωη. Выход четырнадцатого сумматора 92 подключен к первому входу семнадцатого устройства умножения 93, к выходу которого подсоединен второй суммирующий вход тринадцатого сумматора 90, к выходу тринадцатого сумматора 90 подключен первый суммирующий вход пятнадцатого сумматора 94, к второму суммирующему входу которого подсоединен выход пятого сумматора 67. Первый вход третьего устройства деления 95 соединен с выходом «в» ИНС 1 с данными скорости Vζ, выход третьего устройства деления 95 подключен к вычитающему входу пятнадцатого сумматора 94, выход которого соединен с входом третьего интегратора 96. Выход третьего интегратора 96 предназначен для выхода «ч» ФИО 4 с оценкой угла рассогласования . К вторым входам первого 85, второго 91 и третьего 95 устройств деления подключен выход «с» навигационного вычислителя 3 с данными радиуса кривизны Rη земного эллипсоида. Выход «в1» второго интегратора 83 подключен к второму входу шестнадцатого устройства умножения 49 в вычислительном устройстве формирования оценок в продольном канале ГП, к второму входу одиннадцатого устройства умножения 79 подсоединен выход «г1» второго интегратора 31 в вычислительном устройстве формирования оценок в продольном канале ГП.
В вычислительном устройстве формирования оценок в азимутальном канале ГП (фиг.4) выход регистра хранения 97 с оптимальным коэффициентом усиления К51 подключен к первому входу первого устройства умножения 98, выход которого соединен с первым суммирующим входом первого сумматора 99. К выходу регистра хранения 100 с оптимальным коэффициентом усиления К52 подсоединен первый вход второго устройства умножения 101, выход которого соединен с вторым суммирующим входом первого сумматора 99. Выход «н» навигационного вычислителя 3 с данными угловой скорости ωζ подключен к первому входу третьего устройства умножения 102, к второму входу которого подсоединен выход «ш» ФИО 4 с оценкой угла рассогласования  , выход третьего устройства умножения 102 соединен с вычитающим входом второго сумматора 103, к суммирующему входу которого подсоединен выход первого сумматора 99. Выход регистра хранения 104 с оптимальным коэффициентом усиления K81 подсоединен к первому входу четвертого устройства умножения 105, выход которого подключен к первому суммирующему входу третьего сумматора 106. Выход регистра хранения 107 с оптимальным коэффициентом усиления K82 подключен к первому входу пятого устройства умножения 108, выход которого соединен с вторым суммирующим выходом третьего сумматора 106, к выходу третьего сумматора 106 подключен вход первого интегратора 109, выход «д1» которого соединен с первым суммирующим входом четвертого сумматора 110 и является выходом ФИО 4 с оценкой скорости дрейфа
, выход третьего устройства умножения 102 соединен с вычитающим входом второго сумматора 103, к суммирующему входу которого подсоединен выход первого сумматора 99. Выход регистра хранения 104 с оптимальным коэффициентом усиления K81 подсоединен к первому входу четвертого устройства умножения 105, выход которого подключен к первому суммирующему входу третьего сумматора 106. Выход регистра хранения 107 с оптимальным коэффициентом усиления K82 подключен к первому входу пятого устройства умножения 108, выход которого соединен с вторым суммирующим выходом третьего сумматора 106, к выходу третьего сумматора 106 подключен вход первого интегратора 109, выход «д1» которого соединен с первым суммирующим входом четвертого сумматора 110 и является выходом ФИО 4 с оценкой скорости дрейфа  Выход «о» навигационного вычислителя 3 с данными угловой скорости ωη подсоединен к первому входу шестого устройства умножения 111, к второму входу которого подключен выход «ч» ФИО 4 с оценкой угла рассогласования
Выход «о» навигационного вычислителя 3 с данными угловой скорости ωη подсоединен к первому входу шестого устройства умножения 111, к второму входу которого подключен выход «ч» ФИО 4 с оценкой угла рассогласования  . Выход второго сумматора 103 подключен к второму суммирующему входу четвертого сумматора 110, третий суммирующий вход которого соединен с выходом шестого устройства умножения 111. Выход четвертого сумматора 110 соединен с входом второго интегратора 112, выход «ы» которого является выходом ФИО 4 с оценкой угла рассогласования
. Выход второго сумматора 103 подключен к второму суммирующему входу четвертого сумматора 110, третий суммирующий вход которого соединен с выходом шестого устройства умножения 111. Выход четвертого сумматора 110 соединен с входом второго интегратора 112, выход «ы» которого является выходом ФИО 4 с оценкой угла рассогласования  . К вторым входам пятого 108 и второго 101 устройств умножения подсоединен выход «a1» второго сумматора 54 в вычислительном устройстве формирования оценок в боковом канале ГП. К вторым входам первого 98 и четвертого 105 устройств умножения подключен выход «б1» второго сумматора 7 в вычислительном устройстве формирования оценок в продольном канале ГП. Выход «д1» первого интегратора 109 соединен с вторым входом семнадцатого устройства умножения 52 в вычислительном устройстве формирования оценок в продольном канале ГП, вторым входом восьмого устройства умножения 74 в вычислительном устройстве формирования оценок в боковом канале ГП, выход «ы» второго интегратора 112 подключен к вторым входам пятого 17 и четырнадцатого 45 устройств умножения в вычислительном устройстве формирования оценок в продольном канале ГП и вторым входам четырнадцатого 86 и семнадцатого 93 устройств умножения в вычислительном устройстве формирования оценок в боковом канале ГП.
. К вторым входам пятого 108 и второго 101 устройств умножения подсоединен выход «a1» второго сумматора 54 в вычислительном устройстве формирования оценок в боковом канале ГП. К вторым входам первого 98 и четвертого 105 устройств умножения подключен выход «б1» второго сумматора 7 в вычислительном устройстве формирования оценок в продольном канале ГП. Выход «д1» первого интегратора 109 соединен с вторым входом семнадцатого устройства умножения 52 в вычислительном устройстве формирования оценок в продольном канале ГП, вторым входом восьмого устройства умножения 74 в вычислительном устройстве формирования оценок в боковом канале ГП, выход «ы» второго интегратора 112 подключен к вторым входам пятого 17 и четырнадцатого 45 устройств умножения в вычислительном устройстве формирования оценок в продольном канале ГП и вторым входам четырнадцатого 86 и семнадцатого 93 устройств умножения в вычислительном устройстве формирования оценок в боковом канале ГП.
В вычислительном устройстве для преобразования измеренных с помощью источника сигналов коррекции ИНС скоростей Wx, Wy, Wz в проекции на оси опорного трехгранника ГП VξK, VηK (фиг.5) к первому входу первого устройства умножения 113 подключен выход «ж1» вычислительного устройства тригонометрических функций с данными cosφ, выход ПЗУ «з1» с данными угловой скорости U Земли подсоединен к второму входу первого устройства умножения 113, к выходу которого подключен первый вход второго устройства умножения 114. Выход «и1» вычислительного устройства с данными радиуса кривизны параллели RE подсоединен к второму входу второго устройства умножения 114, выход которого подсоединен к первым входам третьего 115 и четвертого 116 устройств умножения. Выход «к1» вычислительного устройства тригонометрических функций с данными sinχ подключен к второму входу третьего устройства умножения 115, к выходу которого подсоединен первый суммирующий вход первого сумматора 117, к первым входам «м» пятого 118, шестого 119 и седьмого 120 устройств умножения подсоединен выход «л1» вычислительного устройства тригонометрических функций с данными cosψГ. Выход «м1» вычислительного устройства тригонометрических функций с данными cosυ подсоединен к второму входу пятого устройства умножения 118. Выход пятого устройства умножения 118 соединен с первым входом восьмого устройства умножения 121, выход которого подсоединен к второму суммирующему входу первого сумматора 117. Выход «ж» источника сигналов коррекции 2 ИНС с данными скорости Wx подключен к второму входу восьмого устройства умножения 121 и к первому входу девятого устройства умножения 182. К выходу «н1» вычислительного устройства тригонометрических функций с данными sin и подсоединены второй вход шестого устройства умножения 119 и первый вход десятого устройства умножения 123. Выход шестого устройства умножения 119 соединен с первыми входами одиннадцатого 124, двенадцатого 125 и тринадцатого 126 устройств умножения, выход одиннадцатого устройства умножения 124 подключен к первому суммирующему входу второго сумматора 127, к выходу которого подсоединен первый вход четырнадцатого устройства умножения 128. Выход «o1» вычислительного устройства тригонометрических функций с данными cosγ подключен к вторым входам седьмого 120 и одиннадцатого 124 устройств умножения, к первым входам пятнадцатого 129 и шестнадцатого 130 устройств умножения. К второму входу четырнадцатого устройства умножения 128 и к первому входу семнадцатого устройства умножения 131 подсоединен выход «з» источника сигналов коррекции 2 ИНС с данными скорости Wy. Выход четырнадцатого устройства умножения 128 подключен к вычитающему входу третьего сумматора 132, к суммирующему входу которого подсоединен выход первого сумматора 117. Выход «п1» вычислительного устройства тригонометрических функций с данными sinψГ подсоединен к первому входу восемнадцатого устройства умножения 133 и к вторым входам десятого 123 и шестнадцатого 130 устройств умножения. К выходу «p1» вычислительного устройства с данными sinγ подсоединены первый вход девятнадцатого устройства умножения 134 и вторые входы двенадцатого 125, тринадцатого 126 и восемнадцатого 133 устройств умножения. К выходу восемнадцатого устройства умножения 133 подключен второй суммирующий вход второго сумматора 127, выход десятого устройства умножения 123 подсоединен к вторым входам девятого 122, пятнадцатого 129 и девятнадцатого 134 устройств умножения. Выход «c1» вычислительного устройства тригонометрических функций с данными cosχ подключен к второму входу четвертого устройства умножения 116, выход которого соединен с суммирующим входом четвертого сумматора 135, к вычитающему входу которого подсоединен выход девятого устройства умножения 122. К выходу пятнадцатого устройства умножения 129 подсоединен суммирующий вход пятнадцатого сумматора 136, вычитающий вход которого подключен к выходу двенадцатого устройства умножения 125. Выход пятого сумматора 136 соединен с вторым входом семнадцатого устройства умножения 131, выход которого подключен к первому суммирующему входу шестого сумматора 137, второй суммирующий вход которого соединен с выходом четвертого сумматора 135. К первым входам двадцатого 138 и двадцать первого 139 устройств умножения подсоединен выход «и» источника сигналов коррекции 2 ИНС с данными скорости Wz, к выходу тринадцатого устройства умножения 126 подключен суммирующий вход седьмого сумматора 140, а его вычитающий вход соединен с выходом шестнадцатого устройства умножения 130. Выход седьмого сумматора 140 подсоединен к второму входу двадцатого устройства умножения 138, выход которого подключен к первому суммирующему входу восьмого сумматора 141, к выходу третьего сумматора 132 подключен второй суммирующий вход восьмого сумматора 141, выход «т» которого является выходом навигационного вычислителя 3 с данными скорости VξK. Выход девятнадцатого устройства умножения 134 соединен с первым суммирующим входом девятого сумматора 142, к второму суммирующему входу которого подключен выход седьмого устройства умножения 120. Выход девятого сумматора 142 подсоединен к второму входу двадцать первого устройства умножения 139, выход которого подключен к вычитающему входу десятого сумматора 143. Выход шестого сумматора 137 подключен к суммирующему входу десятого сумматора 143, выход «у» которого является выходом навигационного вычислителя 3 с данными скорости VηK.
Вычислитель поправок 5 (фиг.6) содержит вычислительное устройство 144 тригонометрических функций с подключенными к его входам выходом «ф» навигационного вычислителя 3 с данными азимута χ и выходом «х» с данными географической долготы φ. В нем выход «ш» ФИО 4 с оценкой угла рассогласования  у подключен к первым входам первого 145 и второго 146 устройств умножения, выход вычислительного устройства 144 с данными cosχ подсоединен к второму входу первого устройства умножения 145, к первым входам третьего 147, четвертого 148 и пятого 149 устройств умножения. Выход вычислительного устройства 144 тригонометрических функций с данными sinχ подключен к второму входу второго устройства умножения 146 и к первым входам шестого 150, седьмого 151 и восьмого 152 устройств умножения, выход «ч» ФИО 4 с оценкой угла рассогласования подсоединен к вторым входам третьего 147 и шестого 150 устройств умножения. Выход шестого устройства умножения 150 соединен с вычитающим входом первого сумматора 153. Выход «э» ФИО 4 с оценкой скорости дрейфа
у подключен к первым входам первого 145 и второго 146 устройств умножения, выход вычислительного устройства 144 с данными cosχ подсоединен к второму входу первого устройства умножения 145, к первым входам третьего 147, четвертого 148 и пятого 149 устройств умножения. Выход вычислительного устройства 144 тригонометрических функций с данными sinχ подключен к второму входу второго устройства умножения 146 и к первым входам шестого 150, седьмого 151 и восьмого 152 устройств умножения, выход «ч» ФИО 4 с оценкой угла рассогласования подсоединен к вторым входам третьего 147 и шестого 150 устройств умножения. Выход шестого устройства умножения 150 соединен с вычитающим входом первого сумматора 153. Выход «э» ФИО 4 с оценкой скорости дрейфа  подключен к вторым входам пятого 149 и седьмого 151 устройств умножения, выход «щ» ФИО 4 с оценкой скорости дрейфа
подключен к вторым входам пятого 149 и седьмого 151 устройств умножения, выход «щ» ФИО 4 с оценкой скорости дрейфа  подсоединен к вторым входам четвертого 148 и восьмого 152 устройств умножения. К выходу седьмого устройства умножения 151 подсоединен первый суммирующий вход второго сумматора 154, второй суммирующий вход которого соединен с выходом четвертого устройства умножения 148, выход второго сумматора 154 соединен с первым входом девятого устройства умножения 155, к выходу которого подключен вычитающий вход третьего сумматора 156. Выход генератора пилообразных колебаний 157 подключен к входам первого 158, второго 159 и третьего 160 ключей. К выходу первого ключа 158 подсоединен вход первого порогового устройства 161, выход которого соединен с входом первого АЦП 162, второй вход девятого устройства умножения 155 соединен с выходом первого АЦП 162. Выход второго устройства умножения 146 подключен к первому суммирующему входу четвертого сумматора 163, второй суммирующий вход которого соединен с выходом третьего устройства умножения 147, к выходу вычислительного устройства 144 тригонометрических функций с данными cosφ подсоединен вход устройства деления 164, к выходу которого подключены первые входы десятого 165, одиннадцатого 166 и двенадцатого 167 устройств умножения. Выход восьмого устройства умножения 152 соединен с вычитающим входом пятого сумматора 168, суммирующий вход которого подключен к выходу пятого устройства умножения 149. К выходу второго ключа 159 подсоединен вход второго порогового устройства 169, к выходу которого подключен вход второго АЦП 170, к первому входу тринадцатого устройства умножения 171 подсоединен выход второго АЦП 170. Выход пятого сумматора 168 соединен с вторым входом одиннадцатого устройства умножения 166, выход которого подсоединен к второму входу тринадцатого устройства умножения 171, к выходу тринадцатого устройства умножения 171 подключен вычитающий вход шестого сумматора 172, суммирующий вход которого подсоединен к выходу десятого устройства умножения 165. К первому суммирующему входу седьмого сумматора 173 подсоединен выход шестого сумматора 172, выход третьего ключа 160 подключен к входу третьего порогового устройства 174, выход которого соединен с входом третьего АЦП 175. К выходу третьего АЦП 175 подсоединен второй вход двенадцатого устройства умножения 167, к выходу которого подключен первый вход четырнадцатого устройства умножения 176. Выход «ц» навигационного вычислителя 3 с данными угловой скорости UN соединен с вторым входом четырнадцатого устройства умножения 176, выход которого подсоединен с первым входом пятнадцатого устройства умножения 177. Выход вычислительного устройства 144 тригонометрических функций с данными tgφ подключен к второму входу пятнадцатого устройства умножения 177. К первому входу шестнадцатого устройства умножения 178 подсоединен выход пятнадцатого устройства умножения 177. Выход «ю» третьего сумматора 156 подключен к второму входу шестнадцатого устройства умножения 178 и является выходом значения коррекции географической широты, подключенного к входу навигационного вычислителя 3. К выходу шестнадцатого устройства умножения 178 подсоединен второй суммирующий вход седьмого сумматора 173, выход «я» которого является выходом значения коррекции географической долготы и подключен к входу навигационного вычислителя 3. Входы «т1», «д1», «ф1» соответственно первого ключа 158, второго ключа 159 и третьего ключа 160 предназначены для их управления.
подсоединен к вторым входам четвертого 148 и восьмого 152 устройств умножения. К выходу седьмого устройства умножения 151 подсоединен первый суммирующий вход второго сумматора 154, второй суммирующий вход которого соединен с выходом четвертого устройства умножения 148, выход второго сумматора 154 соединен с первым входом девятого устройства умножения 155, к выходу которого подключен вычитающий вход третьего сумматора 156. Выход генератора пилообразных колебаний 157 подключен к входам первого 158, второго 159 и третьего 160 ключей. К выходу первого ключа 158 подсоединен вход первого порогового устройства 161, выход которого соединен с входом первого АЦП 162, второй вход девятого устройства умножения 155 соединен с выходом первого АЦП 162. Выход второго устройства умножения 146 подключен к первому суммирующему входу четвертого сумматора 163, второй суммирующий вход которого соединен с выходом третьего устройства умножения 147, к выходу вычислительного устройства 144 тригонометрических функций с данными cosφ подсоединен вход устройства деления 164, к выходу которого подключены первые входы десятого 165, одиннадцатого 166 и двенадцатого 167 устройств умножения. Выход восьмого устройства умножения 152 соединен с вычитающим входом пятого сумматора 168, суммирующий вход которого подключен к выходу пятого устройства умножения 149. К выходу второго ключа 159 подсоединен вход второго порогового устройства 169, к выходу которого подключен вход второго АЦП 170, к первому входу тринадцатого устройства умножения 171 подсоединен выход второго АЦП 170. Выход пятого сумматора 168 соединен с вторым входом одиннадцатого устройства умножения 166, выход которого подсоединен к второму входу тринадцатого устройства умножения 171, к выходу тринадцатого устройства умножения 171 подключен вычитающий вход шестого сумматора 172, суммирующий вход которого подсоединен к выходу десятого устройства умножения 165. К первому суммирующему входу седьмого сумматора 173 подсоединен выход шестого сумматора 172, выход третьего ключа 160 подключен к входу третьего порогового устройства 174, выход которого соединен с входом третьего АЦП 175. К выходу третьего АЦП 175 подсоединен второй вход двенадцатого устройства умножения 167, к выходу которого подключен первый вход четырнадцатого устройства умножения 176. Выход «ц» навигационного вычислителя 3 с данными угловой скорости UN соединен с вторым входом четырнадцатого устройства умножения 176, выход которого подсоединен с первым входом пятнадцатого устройства умножения 177. Выход вычислительного устройства 144 тригонометрических функций с данными tgφ подключен к второму входу пятнадцатого устройства умножения 177. К первому входу шестнадцатого устройства умножения 178 подсоединен выход пятнадцатого устройства умножения 177. Выход «ю» третьего сумматора 156 подключен к второму входу шестнадцатого устройства умножения 178 и является выходом значения коррекции географической широты, подключенного к входу навигационного вычислителя 3. К выходу шестнадцатого устройства умножения 178 подсоединен второй суммирующий вход седьмого сумматора 173, выход «я» которого является выходом значения коррекции географической долготы и подключен к входу навигационного вычислителя 3. Входы «т1», «д1», «ф1» соответственно первого ключа 158, второго ключа 159 и третьего ключа 160 предназначены для их управления.
В устройстве коррекции в навигационном вычислителе 3 (фиг.7) выход «х» вычислительного устройства с данными счисленной широты подключен к суммирующему входу первого сумматора 179, а к его вычитающему входу подсоединен выход «ю» третьего сумматора 156 в вычислителе поправок 5. Выход первого сумматора 179 является выходом откорректированного значения географической широты. Выход «x1» вычислительного устройства в навигационном вычислителе 3 с данными счисленной долготы подсоединен к суммирующему входу второго сумматора 180, к вычитающему входу которого подключен выход «я» седьмого сумматора 173 вычислителя поправок 5, выход второго сумматора 180 является выходом откорректированного значения географической долготы.
Для выполнения математических операций в навигационном вычислителе 3, ФИО 4 и вычислителе поправок 5 предусмотрены процессоры и оперативные запоминающие устройства.
Выполнение навигационного комплекса в соответствии с фиг.1-7 основано на математической модели формирования поправок в географическую широту и географическую долготу по результатам коррекции скорости объекта от источника сигналов коррекции 2 в виде ДИСС или спутниковой навигационной системы.
Так как уравнения ошибок ИНС формируются в проекциях на оси опорного трехгранника Oξηζ, ГП, то измеренные ДИСС составляющие скорости в проекциях на оси связанной с объектом системы координат OXYZ преобразуются в проекции на оси опорного трехгранника ГП следующим образом.
В соответствии с фиг.8,
где ONHE - географический сопровождающий трехгранник,
OXГ, YГ, ZГ - горизонтированная система координат объекта, следуют такие матричные соотношения между системами координат
Подставляя соотношение (4) в соотношение (2) получим
Матрицы Г и S имеют следующий вид:
где ψГ - гироскопический курс.
где γ - угол крена, ϑ - угол тангажа.
Транспонированные выражения для представленных матриц (6), (7)
Искомая матрица ГT ST имеет вид

В соответствии с (5) выражения для нахождения горизонтальных составляющих скоростей, полученных по измерениям ДИСС, в проекциях на оси опорного трехгранника ГП будут иметь вид

где Wx, Wy, Wz - измеренные посредством ДИСС составляющие путевой скорости в связанных с объектом осях.
Составляющие линейной скорости, являющиеся следствием вращения Земли, будут равны
где RE - главный радиус кривизны земного эллипсоида;
χ - истинный курс ГП;
φ - географическая широта;
U - угловая скорость вращения Земли.
Суммируя соответствующие составляющие выражений (11) и (12), получим

Сравнивая составляющие Vξ и Vη абсолютной скорости, измеренной ИНС 1, с аналогичными составляющими (13), получим следующие выражения для расчета сигналов рассогласования для ФИО 4
Полная модель ошибок ИНС 1 имеет вид





 ,
,
где  - погрешности измеренных посредством ИНС соответственно скоростей Vx, Vy по осям X, Y;
- погрешности измеренных посредством ИНС соответственно скоростей Vx, Vy по осям X, Y;
gζ - вертикальная проекция вектора ускорения свободного падения;
αx - угол рассогласования между осью Z реального трехгранника ГП и осью ζ, опорного трехгранника ГП;
αy - угол рассогласования между осью X реального трехгранника ГП и осью ζ, опорного трехгранника ГП;
Vζ, Vη - проекции скорости на оси ξ, η опорного трехгранника ГП;
ωξ, ωη - проекции угловых скоростей на оси ξ, η опорного трехгранника ГП;
Uζ - проекция угловой скорости Земли на ось ζ опорного трехгранника ГП;
εx, εy, εz - скорости дрейфа ГП относительно осей X, Y, Z реального трехгранника ГП;
Rξ, Rη - радиусы кривизны земного эллипсоида по осям, проходящим через оси ГП.
Приведенная модель ошибок получена для случая представления выходных сигналов ИНС 1 по скорости в следующем виде:
Подставляя (16) в (14), получим модель измерения вида
где  ,
,  - шумы измерения, имеющие характер «белых».
- шумы измерения, имеющие характер «белых».
В соответствии с (15), вектор состояния системы X и вектор оптимальных оценок  будут иметь следующий вид:
будут иметь следующий вид:
После представления системы дифференциальных уравнений (15) в дискретном виде может быть записана фундаментальная матрица Ф системы, а в соответствии с (17) и (18) - матрица измерения Н

В соответствии с процедурой непрерывной оптимальной фильтрации Калмана матричное дифференциальное уравнение, описывающее характер изменения оценок параметров состояния системы, будет иметь следующий вид:

где F - матрица состояния системы, определяемая коэффициентами системы дифференциальных уравнений (15).
Введем в рассмотрение вектор υ невязок измерения υx и υy

В соответствии с (17), (18) и (19) выражения для расчета невязок измерения υx и υy будут иметь следующий вид:
С учетом (21) матричное дифференциальное уравнение (20) примет вид

где матрица оптимальных коэффициентов усиления K для рассматриваемой задачи будет иметь следующий вид:
В соответствии с (15), (16), (19), (22), (23) и (24) указанная система дифференциальных уравнений, описывающих характер изменения оптимальных оценок, представлена в виде
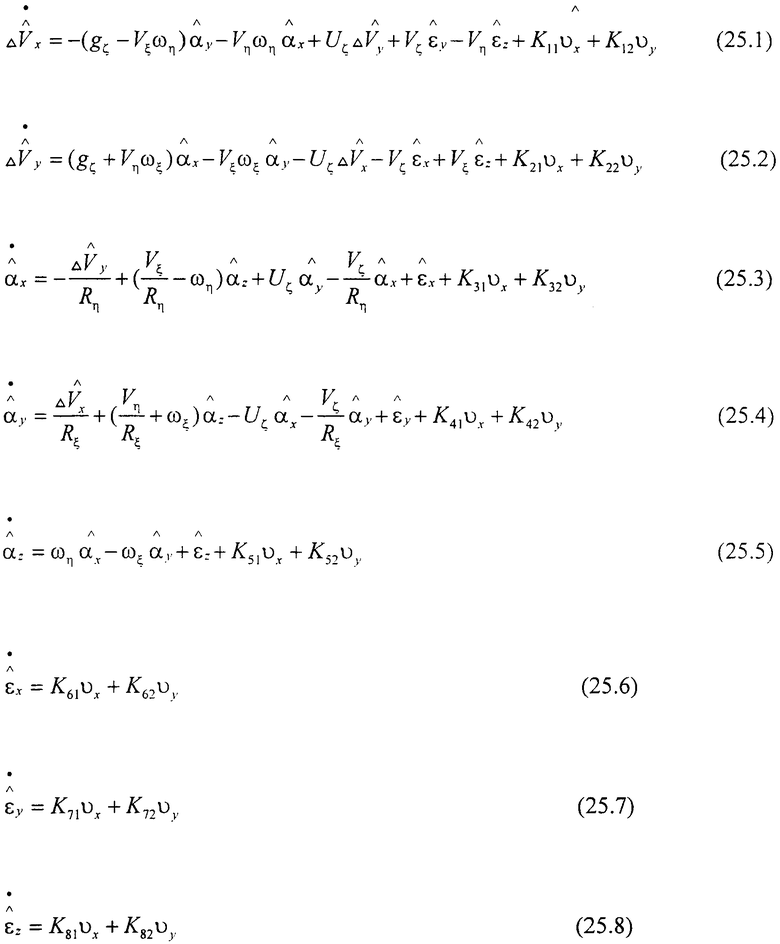
Навигационный комплекс работает следующим образом. По результатам измерений ускорений посредством акселерометров, измерений угловых положений посредством СКВТ по каждой из осей ГП ИНС 1 выдает в навигационный вычислитель 3 данные о составляющих абсолютных скоростей Vξ, Vη, Vζ, о гироскопическом курсе ψГ, об углах крена γ, тангажа ϑ.
Источник сигналов коррекции 2 ИНС направляет в навигационный вычислитель 3 данные значения измеренных скоростей Wx, Wy, Wz посредством ДИСС или спутниковой навигационной системы.
В навигационном вычислителе 3 производится вычисление географической широты φ, географической долготы λ, азимута χ ГП, линейных скоростей Vx, Vy по соотношению (16), проекции Uζ угловой скорости U Земли по формуле

В навигационном вычислителе 3 производятся следующие расчеты
- скоростей VN, VE в осях сопровождающего трехгранника по формулам
- радиусов кривизны RN меридиана, RE широты по формулам
где a - большая полуось земного эллипсоида;
H - абсолютная высота;
е2 - величина, равная 0,0066934216.
Вычисление радиусов кривизны Rξ, Rη земного эллипсоида по сечениям, проходящим через ось ГП, и вспомогательного параметра R0 производится по формулам
Определение составляющей gζ вектора ускорения свободного падения происходит в соответствии с соотношением

где ge=9,780318 м/с2;
g=0,00346775.
Расчет составляющих угловой скорости ωξ, ωη происходит по формулам
В вычислительном устройстве (фиг.5) для преобразования измеренных с помощью источника сигналов коррекции 2 ИНС скоростей Wx, Wy, Wz в их проекции VζK, VηK на оси опорного трехгранника ГП при поступлении на входы навигационного вычислителя 3 от источника сигналов коррекции 2 ИНС с выхода «ж» значения скорости Wx на входы восьмого 121 и девятого 122 устройств умножения, с выхода «з» значения скорости Wy на входы четырнадцатого 128 и семнадцатого 131 устройств умножения, с выхода «и» значения скорости Wz на входы двадцатого 138 и двадцать первого 139 устройств умножения с помощью выполненных в нем сумматоров и устройств умножения производятся операции, в результате которых в соответствии с соотношением (13) на выходе «т» навигационного вычислителя 3 образуется значение скорости VξK, а на выходе «у» - значение скорости VηK.
Вычислительное устройство (фиг.2) для формирования оценок в продольном канале ГП осуществляет решение уравнений (25.1), (25.4), (25.7).
В результате подачи с выходов «к», «т» навигационного вычислителя 3 на суммирующий вход «к» первого сумматора 6 значения скорости Vx, на его вычитающий вход «т» значения скорости VξK на выходе «г1» второго интегратора 31 формируется оценка погрешности скорости  на выходе «э» первого интегратора 15 одновременно и выход ФИО 4) - оценка скорости дрейфа ГП. Оценка угла рассогласования получается на выходе «ш» третьего интегратора 47, выход которого является также выходом ФИО 4.
на выходе «э» первого интегратора 15 одновременно и выход ФИО 4) - оценка скорости дрейфа ГП. Оценка угла рассогласования получается на выходе «ш» третьего интегратора 47, выход которого является также выходом ФИО 4.
В вычислительном устройстве (фиг.3) для формирования оценок в боковом канале ГП происходит решение уравнений (25.2), (25.3). (25.6). При подаче с выходов «л», «у» навигационного вычислителя 3 на суммирующий вход первого сумматора 53 значения скорости Vy, на его вычитающий вход значения скорости VηK в результате проведенных вычислений на выходе «в1» второго интегратора 83 получается оценка погрешности скорости  , оценка скорости дрейфа ГП получается на выходе «щ» первого интегратора 66, выход которого является выходом ФИО 4.
, оценка скорости дрейфа ГП получается на выходе «щ» первого интегратора 66, выход которого является выходом ФИО 4.
Вычислительное устройство (фиг.4) для формирования оценок в азимутальном канале ГП осуществляет операции по решению уравнений (25.5), (25.8). При подаче на суммирующие входы первого 99 и третьего 106 сумматоров невязки измерения υx с выхода «б1» второго сумматора 7 в вычислительном устройстве (фиг.2) формирования оценок в продольном канале ГП и невязка измерения υy с выхода «a1» второго сумматора 54 в вычислительном устройстве (фиг.3) формирования оценок в боковом канале ГП на выходе «д1» первого интегратора 109 (фиг.4) образуется оценка скорости дрейфа  . Значение оценки угла рассогласования
. Значение оценки угла рассогласования  получается на выходе «ы» второго интегратора 112, который также является выходом ФИО 4.
получается на выходе «ы» второго интегратора 112, который также является выходом ФИО 4.
В результате проведенных операций вычисления в ФИО 4 формируются значения параметров состояния ИНС, включающие в себя следующие ошибки ИНС:

После процесса сопоставления проекций, измеренных с помощью ИНС 1 скоростей Vx, Vy и измеренных посредством источника сигналов 2 ИНС скоростей VξK, VηK в вычислителе поправок 5 производится расчет поправок  в географическую широту и
в географическую широту и  в географическую долготу на основании следующих соотношений:
в географическую долготу на основании следующих соотношений:

где


τ - период времени.

где 

При подаче на входы «ф» и «х» вычислительного устройства 144 тригонометрических функций значений курса χ и географической широты φ, а с одного его выхода на входы первого 145, третьего 147, четвертого 148 и пятого 149 устройств умножения значения cosχ, с другого выхода на входы второго 146, шестого 150, седьмого 151 и восьмого 152 устройств умножения, одновременно при подаче с выхода «ч» ФИО 4 на входы третьего 147 и шестого 150 устройств умножения значения оценки угла рассогласования , с выхода «ш» ФИО 4 на входы первого 145 и второго 146 устройств умножения значения оценки угла рассогласования  , с выхода «щ» ФИО 4 на входы четвертого 148 и восьмого 152 устройств умножения значения оценки скорости дрейфа , с выхода «э» ФИО 4 на входы пятого 149 и седьмого 151 устройств умножения на выходе первого сумматора получается значение члена A формулы (32), на выходе второго сумматора 154 значение члена B, на выходе четвертого сумматора 163 значение члена C формулы (33), на выходе пятого сумматора 168 значение члена D. Чтобы сформировать значение τ, входящего, например, в выражение (32), открывается первый ключ 158 пришедшим на его управляющий вход «т1» сигналом, от генератора пилообразных колебаний 157 на вход первого порогового устройства 161 поступает плавно увеличивающееся по значению напряжение постоянного тока. При достижении на входе первого порогового устройства 161 напряжения срабатывания первое пороговое устройство 161 срабатывает, и на его выходе получается напряжение постоянного тока определенной величины, которое преобразуется в первом АЦП 162 в код периода времени τ. При приходе с выходов второго сумматора 154 и первого АЦП 162 сигналов на входы девятого устройства умножения 155 на его выходе получается значение Bτ. В результате на выходе «ю» третьего сумматора 156 получается значение поправки
, с выхода «щ» ФИО 4 на входы четвертого 148 и восьмого 152 устройств умножения значения оценки скорости дрейфа , с выхода «э» ФИО 4 на входы пятого 149 и седьмого 151 устройств умножения на выходе первого сумматора получается значение члена A формулы (32), на выходе второго сумматора 154 значение члена B, на выходе четвертого сумматора 163 значение члена C формулы (33), на выходе пятого сумматора 168 значение члена D. Чтобы сформировать значение τ, входящего, например, в выражение (32), открывается первый ключ 158 пришедшим на его управляющий вход «т1» сигналом, от генератора пилообразных колебаний 157 на вход первого порогового устройства 161 поступает плавно увеличивающееся по значению напряжение постоянного тока. При достижении на входе первого порогового устройства 161 напряжения срабатывания первое пороговое устройство 161 срабатывает, и на его выходе получается напряжение постоянного тока определенной величины, которое преобразуется в первом АЦП 162 в код периода времени τ. При приходе с выходов второго сумматора 154 и первого АЦП 162 сигналов на входы девятого устройства умножения 155 на его выходе получается значение Bτ. В результате на выходе «ю» третьего сумматора 156 получается значение поправки  в географическую широту, которое является выходом вычислителя поправок 5.
в географическую широту, которое является выходом вычислителя поправок 5.
Аналогично тому, как образуется значение τ на выходе первого АЦП 162, значение τ на выходе второго АЦП 170 формируется в цепи преобразования, содержащей второй ключ 159, второе пороговое устройство 169, второй АЦП 170. После преобразования напряжения с выхода генератора пилообразных колебаний 157 в третьем пороговом устройстве 174, третьем АЦП 175 на выходе третьего АЦП 175 также получается значение периода времени τ.
При подаче на вход четырнадцатого устройства умножения 176 значения угловой скорости UN с выхода «ц» навигационного вычислителя 3, на вход пятнадцатого устройства умножения 15 значения tgφ с выхода вычислительного устройства 144 тригонометрических функций, на вход шестнадцатого устройства умножения 178 значения с выхода третьего сумматора 156 на выходе «я» седьмого сумматора 173 получается значение поправки  , на географическую долготу. Выход «я» седьмого сумматора 173 является выходом вычислителя поправок 5.
, на географическую долготу. Выход «я» седьмого сумматора 173 является выходом вычислителя поправок 5.
В устройстве коррекции (фиг.7) навигационного вычислителя 3 с выхода «х» навигационного вычислителя 3 на суммирующий вход первого сумматора 179 подается значение счисленной географической широты φсч. На вычитающий вход первого сумматора 179 подается значение поправки с выхода «ю» вычислителя поправок 5. В результате на выходе первого сумматора 179 образуется откорректированное по результатам измерения посредством источника сигналов коррекции 2 ИНС скоростей Wx, Wy, Wz значение географической широты φK:

На суммирующий вход «xl» второго сумматора 180 подается рассчитанное в навигационном вычислителе 3 значение счисленной географической долготы λсч. На вычитающий вход второго сумматора 180 поступает значение поправки , с выхода «я» вычислителя поправок 5, и поэтому на выходе второго сумматора 180 получается откорректированное значение географической долготы 

Так как периодически происходит сличение скоростей объекта, измеренных с помощью ИНС 1, с измеренными посредством источника сигналов коррекции 2 ИНС, и в промежутки времени τ вносятся поправки в географическую широту и географическую долготу, то повышается точность определения посредством навигационного комплекса географической широты и географической долготы местоположения объекта.
Источники информации
1. Патент РФ №2233431 кл. G01С 23/00.
Инерциально-спутниковая навигационная система. 2003 г.
2. Патент РФ №2170410 кл. G01C 23/00.
Навигационный комплекс летательного аппарата. 2000 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2465555C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
| СПОСОБ ФОРМИРОВАНИЯ БАРОИНЕРЦИАЛЬНОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2713583C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОСАДКОЙ САМОЛЕТА | 1993 |
|
RU2040434C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| СПОСОБ ОПТИМАЛЬНОГО ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И ЕЁ КОРРЕКЦИИ ПО НЕПОДВИЖНОМУ НАЗЕМНОМУ ОРИЕНТИРУ С ИЗВЕСТНЫМИ ГЕОГРАФИЧЕСКИМИ КООРДИНАТАМИ | 2019 |
|
RU2713582C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВЫЙ МОДУЛЬ И КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, СВЯЗИ, ОСВЕЩЕНИЯ ОБСТАНОВКИ, УПРАВЛЕНИЯ И КОНТРОЛЯ | 1992 |
|
RU2036432C1 |
| УСТРОЙСТВО КОМПЛЕКСНОГО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2014 |
|
RU2546076C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
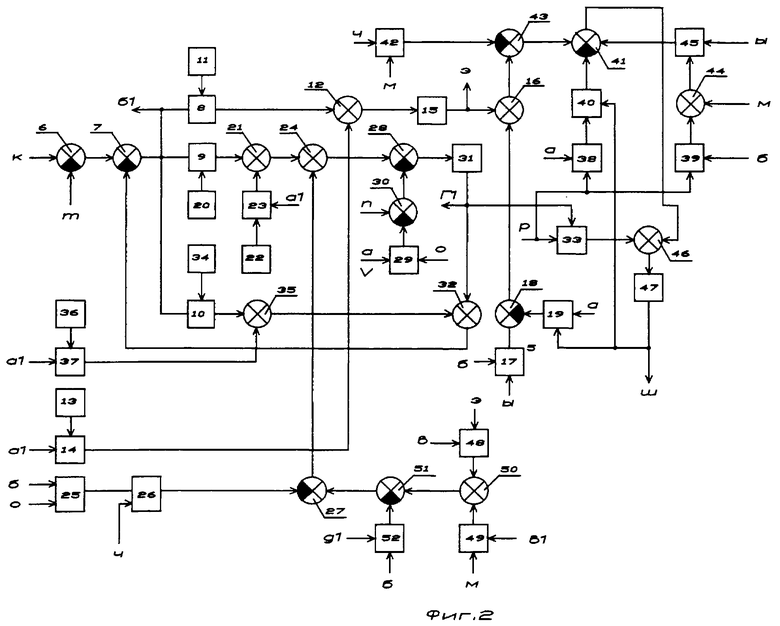
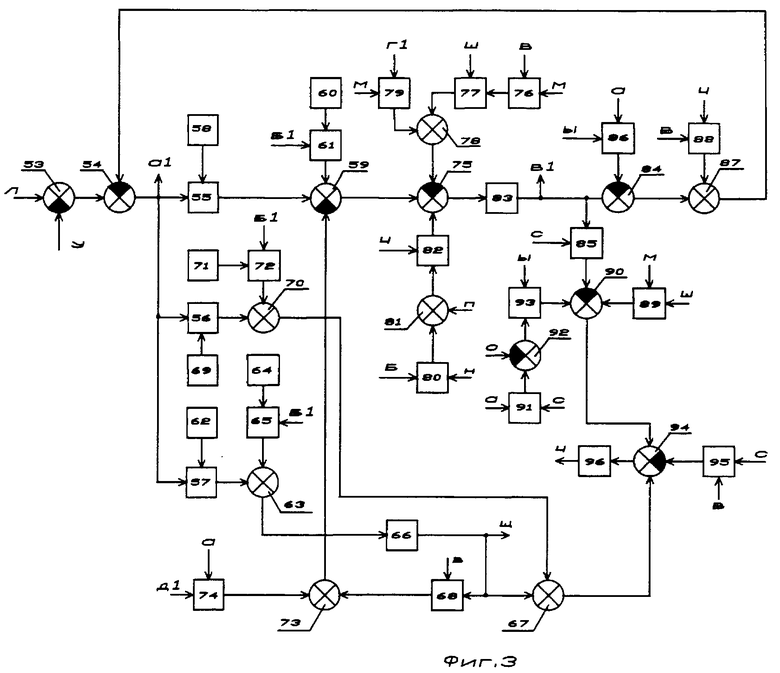
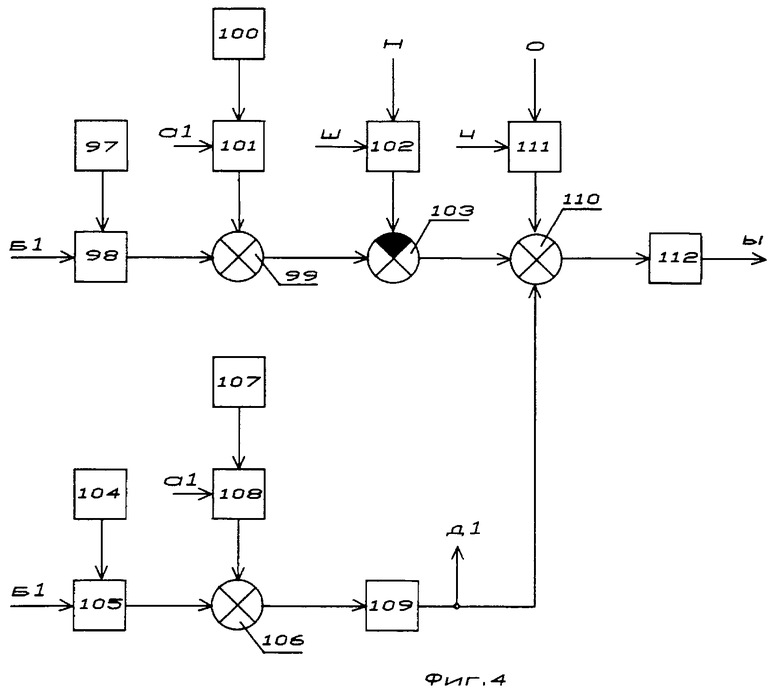
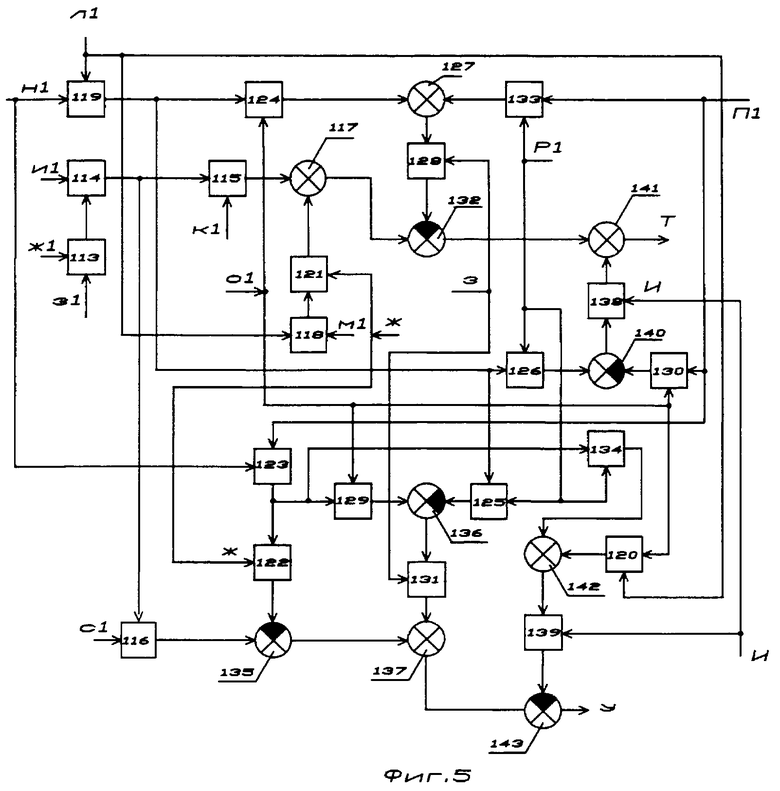
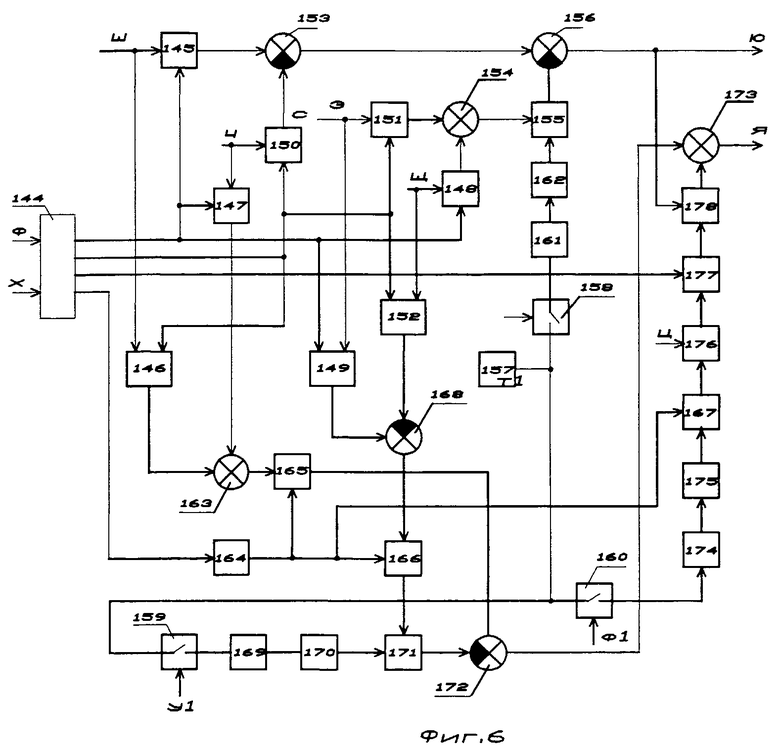
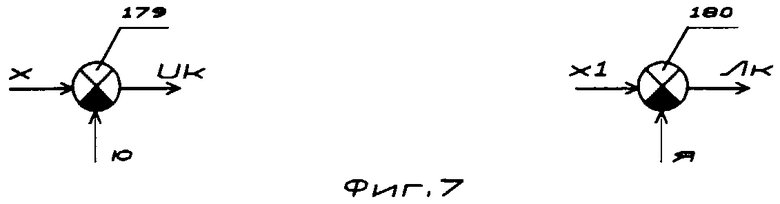
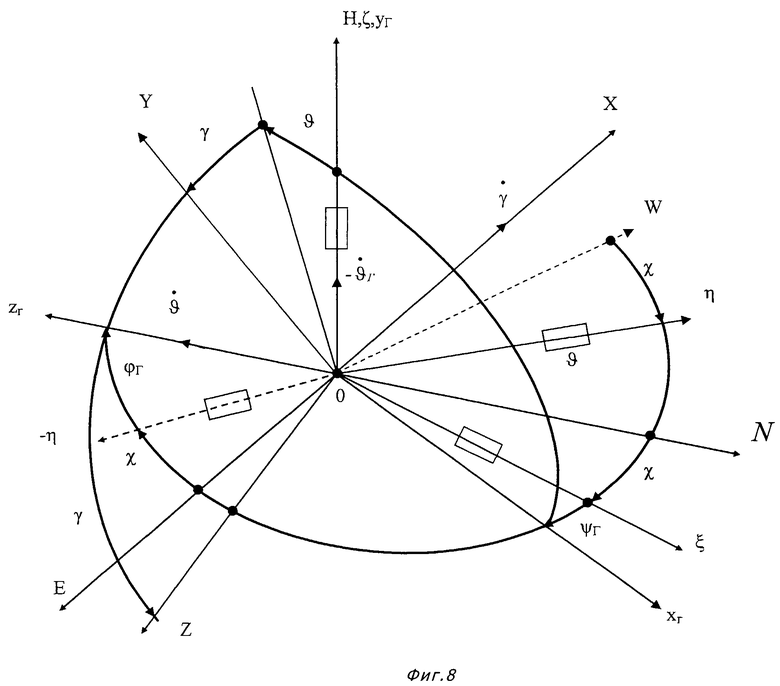
Изобретение относится к области навигационных систем, а именно к интегрированным навигационным системам. Технический результат - повышение точности. Для достижения данного результата навигационный комплекс содержит инерциальную навигационную систему (ИНС) с гироплатформой (ГП), навигационный вычислитель с устройством коррекции, фильтр-идентификатор оценок (ФИО), вычислитель поправок, источник сигналов коррекции ИНС. При этом вычислительное устройство осуществляет преобразования измеренных с помощью источника сигналов коррекции ИНС скоростей в их проекции на оси опорного трехгранника ГП, с входами навигационного вычислителя соединены выходы источника сигналов коррекции ИНС. ФИО содержит шестнадцать регистров хранения, вычислительные устройства для формирования в продольном канале ГП оценок одних параметров ИНС на восемнадцати сумматорах, семнадцати устройствах умножения, трех устройствах деления, трех интеграторах, формирования в боковом канале ГП оценок других параметров ИНС. Вычислитель поправок выполнен в составе вычислительного устройства тригонометрических функций, семи сумматоров, шестнадцати устройств умножения, устройства деления, трех пороговых устройств, трех ключей, генератора пилообразных колебаний, трех АЦП. 8 ил.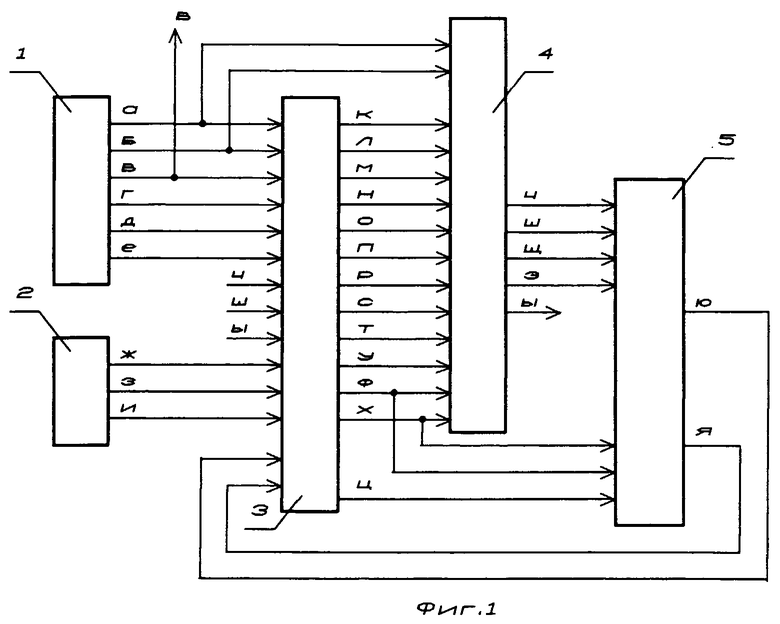
Навигационный комплекс, содержащий инерциальную навигационную систему (ИНС) с гироплатформой (ГП), навигационный вычислитель с устройством коррекции, фильтр-идентификатор оценок (ФИО), вычислитель поправок, источник сигналов коррекции ИНС, причем на основании ГП установлены акселерометры и гироскопы, по каждой из осей ГП установлены синусно-косинусный вращающийся трансформатор (СКВТ) и двигатель стабилизации, в ИНС выполнены преобразователи аналог-код для обработки сигналов акселерометров и СКВТ, преобразователи код-частота для стабилизации и управления ГП, выходы ИНС с данными составляющих абсолютных скоростей Vξ, Vη, Vζ в системе координат Oξηζ опорного трехгранника ГП, гироскопического курса ΨГ, углов крена γ, тангажа ϑ соединены с одними из входов навигационного вычислителя, с другими входами которого соединены выходы источника сигнала коррекции ИНС, в навигационном вычислителе выполнены постоянное запоминающее устройство (ПЗУ) с данными угловой скорости U Земли, константами a, ge, g, e выражения для определения ускорения свободного падения, вычислительные средства для расчета выдаваемых сигналов географической широты φ, географической долготы λ, азимута χ ГП, линейных скоростей Vx, Vy в связанной системе координат объекта, проекций Uξ, Uη, Uζ угловой скорости Земли на оси опорного трехгранника ГП, северной UN и восточной UE составляющих угловой скорости Земли, абсолютных угловых скоростей ωξ, ωη составляющих вектора местного ускорения свободного падения gξ, gη, gζ, радиусов кривизны Rξ, Rη земного эллипсоида по сечениям, проходящим через оси ГП, радиусов кривизны меридиана RN, параллели RE, вспомогательного параметра RO, тригонометрических функций, причем выходы вычислителя поправок подсоединены к входам навигационного вычислителя, отличающийся тем, что в навигационном вычислителе выполнено вычислительное устройство для преобразования измеренных с помощью источника сигналов коррекции ИНС скоростей Wx, Wy, Wz в их проекции VξK, VηK на оси опорного трехгранника ГП, с входами навигационного вычислителя соединены выходы источника сигналов коррекции ИНС, содержащие данные об измеренных составляющих путевой скорости Wx, Wy, WZ в связанных с объектом осях, с входами ФИО соединены выходы ИНС с данными абсолютных скоростей Vξ, Vη, выходы навигационного вычислителя с данными линейных скоростей Vx, Vy, составляющей Uζ угловой скорости Земли, абсолютных угловых скоростей ωξ, ωη составляющей вектора местного ускорения свободного падения gζ, радиусов кривизны Rξ, Rη земного эллипсоида, горизонтальных составляющих скорости VξK, VηK в проекциях на оси опорного трехгранника ГП, полученных по измерениям скоростей посредством источника сигналов коррекции ИНС, азимута χ, географической широты φ, с входами вычислителя поправок соединены выходы навигационного вычислителя с данными азимута χ, географической широты φ, северной составляющей UN угловой скорости Земли, выходы ФИО с данными оценки угла рассогласования  между осью Z реального трехгранника ГП и осью ζ опорного трехгранника ГП, угла рассогласования
между осью Z реального трехгранника ГП и осью ζ опорного трехгранника ГП, угла рассогласования  между осью Х реального трехгранника ГП и осью ξ опорного трехгранника ГП, оценок скоростей дрейфа
между осью Х реального трехгранника ГП и осью ξ опорного трехгранника ГП, оценок скоростей дрейфа  ,
,  относительно осей Х и Y соответственно, выходы ФИО с оценками углов рассогласования
относительно осей Х и Y соответственно, выходы ФИО с оценками углов рассогласования 
 угла рассогласования
угла рассогласования  между осью Y реального трехгранника ГП и осью η опорного трехгранника ГП подключены к входам навигационного вычислителя, выходы вычислителя поправок с данными поправок в географическую широту и географическую долготу также подсоединены к входам навигационного вычислителя; в ФИО выполнены шестнадцать регистров хранения, в которых прошиты значения оптимальных коэффициентов усиления K11, K21, K31, K41, K51, K61, K71, K81, K12, K22, K32, K42, K52, K62, K72, K82 соответственно, выполнены вычислительные устройства для формирования в продольном канале ГП оценок погрешности скорости
между осью Y реального трехгранника ГП и осью η опорного трехгранника ГП подключены к входам навигационного вычислителя, выходы вычислителя поправок с данными поправок в географическую широту и географическую долготу также подсоединены к входам навигационного вычислителя; в ФИО выполнены шестнадцать регистров хранения, в которых прошиты значения оптимальных коэффициентов усиления K11, K21, K31, K41, K51, K61, K71, K81, K12, K22, K32, K42, K52, K62, K72, K82 соответственно, выполнены вычислительные устройства для формирования в продольном канале ГП оценок погрешности скорости  угла рассогласования
угла рассогласования  скорости дрейфа
скорости дрейфа  в боковом канале ГП оценок погрешности скорости
в боковом канале ГП оценок погрешности скорости  угла рассогласования
угла рассогласования  скорости дрейфа
скорости дрейфа  в азимутальном канале ГП оценок рассогласования
в азимутальном канале ГП оценок рассогласования  скорости дрейфа
скорости дрейфа  в вычислителе поправок выполнены вычислительные устройства для формирования поправок в географическую широту φ и географическую долготу λ; в вычислительном устройстве для формирования оценок в продольном канале ГП выполнены восемнадцать сумматоров, семнадцать устройств умножения, три устройства деления, три интегратора, при этом выход навигационного вычислителя с данными скорости Vx подсоединен к суммирующему входу первого сумматора, к вычитающему входу которого подключен выход навигационного вычислителя с данными проекции скорости VξK, к выходу первого сумматора подсоединен суммирующий вход второго сумматора, к выходу которого подключены первые входы первого, второго и третьего устройств умножения, выход регистра хранения с оптимальным коэффициентом усиления K71 подсоединен к второму входу первого устройства умножения, выход которого подключен к первому суммирующему входу третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления K72 подключен к первому входу четвертого устройства умножения, выход которого подсоединен к второму суммирующему входу третьего сумматора, выход третьего сумматора соединен с входом первого интегратора, выход которого подключен к первому суммирующему входу четвертого сумматора и является выходом ФИО с оценкой дрейфа , выход ИНС с данными скорости Vη подсоединен к первому входу пятого устройства умножения, выход которого подключен к суммирующему входу пятого сумматора, к первому входу шестого устройства умножения подключен выход ИНС с данными скорости Vξ, выход ФИО с оценкой угла рассогласования подсоединен к второму входу шестого устройства умножения, выход которого подключен к вычитающему входу пятого сумматора, выход пятого сумматора подключен к второму суммирующему входу четвертого сумматора, выход регистра хранения с оптимальным коэффициентом усиления K11 подсоединен к второму входу второго устройства умножения, к выходу которого подключен первый суммирующий вход шестого сумматора, выход регистра хранения с оптимальным коэффициентом усиления K12 подключен к первому входу седьмого устройства умножения, выход которого подсоединен к второму суммирующему входу шестого сумматора, выход шестого сумматора подсоединен к первому суммирующему входу седьмого сумматора, к первому входу восьмого устройства умножения подсоединен выход данных скорости Vη ИНС, выход данных угловой скорости ωη навигационного вычислителя подключен к второму входу восьмого устройства умножения, к выходу которого подсоединен первый вход девятого устройства умножения, выход ФИО с оценкой угла рассогласования подключен к второму входу девятого устройства умножения, выход которого соединен с вычитающим входом восьмого сумматора, выход восьмого сумматора подключен к второму суммирующему входу седьмого сумматора, выход которого подсоединен к суммирующему входу девятого сумматора, выход ИНС с данными скорости Vξ подсоединен к первому входу десятого устройства умножения, второй вход которого соединен с выходом навигационного вычислителя с данными угловой скорости ωη, к выходу десятого устройства умножения подключен вычитающий вход десятого сумматора, к суммирующему входу которого подсоединен выход навигационного вычислителя с данными проекции gζ вектора ускорения свободного падения, к выходу десятого сумматора подключен вычитающий вход девятого сумматора, выход которого соединен с входом второго интегратора, выход второго интегратора соединен с первым суммирующим входом одиннадцатого сумматора, первым входом первого устройства деления и является выходом ФИО оценки погрешности скорости
в вычислителе поправок выполнены вычислительные устройства для формирования поправок в географическую широту φ и географическую долготу λ; в вычислительном устройстве для формирования оценок в продольном канале ГП выполнены восемнадцать сумматоров, семнадцать устройств умножения, три устройства деления, три интегратора, при этом выход навигационного вычислителя с данными скорости Vx подсоединен к суммирующему входу первого сумматора, к вычитающему входу которого подключен выход навигационного вычислителя с данными проекции скорости VξK, к выходу первого сумматора подсоединен суммирующий вход второго сумматора, к выходу которого подключены первые входы первого, второго и третьего устройств умножения, выход регистра хранения с оптимальным коэффициентом усиления K71 подсоединен к второму входу первого устройства умножения, выход которого подключен к первому суммирующему входу третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления K72 подключен к первому входу четвертого устройства умножения, выход которого подсоединен к второму суммирующему входу третьего сумматора, выход третьего сумматора соединен с входом первого интегратора, выход которого подключен к первому суммирующему входу четвертого сумматора и является выходом ФИО с оценкой дрейфа , выход ИНС с данными скорости Vη подсоединен к первому входу пятого устройства умножения, выход которого подключен к суммирующему входу пятого сумматора, к первому входу шестого устройства умножения подключен выход ИНС с данными скорости Vξ, выход ФИО с оценкой угла рассогласования подсоединен к второму входу шестого устройства умножения, выход которого подключен к вычитающему входу пятого сумматора, выход пятого сумматора подключен к второму суммирующему входу четвертого сумматора, выход регистра хранения с оптимальным коэффициентом усиления K11 подсоединен к второму входу второго устройства умножения, к выходу которого подключен первый суммирующий вход шестого сумматора, выход регистра хранения с оптимальным коэффициентом усиления K12 подключен к первому входу седьмого устройства умножения, выход которого подсоединен к второму суммирующему входу шестого сумматора, выход шестого сумматора подсоединен к первому суммирующему входу седьмого сумматора, к первому входу восьмого устройства умножения подсоединен выход данных скорости Vη ИНС, выход данных угловой скорости ωη навигационного вычислителя подключен к второму входу восьмого устройства умножения, к выходу которого подсоединен первый вход девятого устройства умножения, выход ФИО с оценкой угла рассогласования подключен к второму входу девятого устройства умножения, выход которого соединен с вычитающим входом восьмого сумматора, выход восьмого сумматора подключен к второму суммирующему входу седьмого сумматора, выход которого подсоединен к суммирующему входу девятого сумматора, выход ИНС с данными скорости Vξ подсоединен к первому входу десятого устройства умножения, второй вход которого соединен с выходом навигационного вычислителя с данными угловой скорости ωη, к выходу десятого устройства умножения подключен вычитающий вход десятого сумматора, к суммирующему входу которого подсоединен выход навигационного вычислителя с данными проекции gζ вектора ускорения свободного падения, к выходу десятого сумматора подключен вычитающий вход девятого сумматора, выход которого соединен с входом второго интегратора, выход второго интегратора соединен с первым суммирующим входом одиннадцатого сумматора, первым входом первого устройства деления и является выходом ФИО оценки погрешности скорости  выход регистра хранения с оптимальным коэффициентом усиления K41 соединен с вторым входом третьего устройства умножения, выход которого соединен с суммирующим входом двенадцатого сумматора, выход регистра хранения с оптимальным коэффициентом усиления К42 подключен к первому входу одиннадцатого устройства умножения, выход которого соединен с вторым суммирующим входом двенадцатого сумматора, к выходу которого подключен второй суммирующий вход одиннадцатого сумматора, выход одиннадцатого сумматора соединен с вычитающим входом второго сумматора, выход навигационного вычислителя с данными радиуса кривизны Rξ земного эллипсоида подключен к второму входу первого устройства деления, первым входам второго и третьего устройств деления, выход ИНС с данными скорости Vξ подсоединен к второму входу второго устройства деления, выход которого соединен с первым входом двенадцатого устройства умножения, а к его второму входу подключен выход ФИО с оценкой угла рассогласования
выход регистра хранения с оптимальным коэффициентом усиления K41 соединен с вторым входом третьего устройства умножения, выход которого соединен с суммирующим входом двенадцатого сумматора, выход регистра хранения с оптимальным коэффициентом усиления К42 подключен к первому входу одиннадцатого устройства умножения, выход которого соединен с вторым суммирующим входом двенадцатого сумматора, к выходу которого подключен второй суммирующий вход одиннадцатого сумматора, выход одиннадцатого сумматора соединен с вычитающим входом второго сумматора, выход навигационного вычислителя с данными радиуса кривизны Rξ земного эллипсоида подключен к второму входу первого устройства деления, первым входам второго и третьего устройств деления, выход ИНС с данными скорости Vξ подсоединен к второму входу второго устройства деления, выход которого соединен с первым входом двенадцатого устройства умножения, а к его второму входу подключен выход ФИО с оценкой угла рассогласования  выход двенадцатого устройства умножения подсоединен к вычитающему входу тринадцатого сумматора, выход ФИО с оценкой угла рассогласования подключен к первому входу тринадцатого устройства умножения, а к его второму входу подсоединен выход навигационного вычислителя с данными угловой скорости Uζ, выход тринадцатого устройства умножения подключен к вычитающему входу четырнадцатого сумматора, к суммирующему входу которого подсоединен выход четвертого сумматора, выход ИНС с данными скорости Vη подсоединен к второму входу третьего устройства деления, к выходу которого подключен первый суммирующий вход пятнадцатого сумматора, выход навигационного вычислителя с данными угловой скорости Uζ подключен к второму суммирующему входу пятнадцатого сумматора, выход которого соединен с первым входом четырнадцатого устройства умножения, выход четырнадцатого устройства умножения подключен к первому суммирующему входу тринадцатого сумматора, второй суммирующий вход которого соединен с выходом четырнадцатого сумматора, выход тринадцатого сумматора подсоединен к первому суммирующему входу шестнадцатого сумматора, к второму суммирующему входу которого подключен выход первого устройства деления, выход шестнадцатого сумматора подключен к входу третьего интегратора, выход которого подсоединен к вторым входам шестого и двенадцатого устройств умножения и является выходом ФИО с оценкой угла рассогласования
выход двенадцатого устройства умножения подсоединен к вычитающему входу тринадцатого сумматора, выход ФИО с оценкой угла рассогласования подключен к первому входу тринадцатого устройства умножения, а к его второму входу подсоединен выход навигационного вычислителя с данными угловой скорости Uζ, выход тринадцатого устройства умножения подключен к вычитающему входу четырнадцатого сумматора, к суммирующему входу которого подсоединен выход четвертого сумматора, выход ИНС с данными скорости Vη подсоединен к второму входу третьего устройства деления, к выходу которого подключен первый суммирующий вход пятнадцатого сумматора, выход навигационного вычислителя с данными угловой скорости Uζ подключен к второму суммирующему входу пятнадцатого сумматора, выход которого соединен с первым входом четырнадцатого устройства умножения, выход четырнадцатого устройства умножения подключен к первому суммирующему входу тринадцатого сумматора, второй суммирующий вход которого соединен с выходом четырнадцатого сумматора, выход тринадцатого сумматора подсоединен к первому суммирующему входу шестнадцатого сумматора, к второму суммирующему входу которого подключен выход первого устройства деления, выход шестнадцатого сумматора подключен к входу третьего интегратора, выход которого подсоединен к вторым входам шестого и двенадцатого устройств умножения и является выходом ФИО с оценкой угла рассогласования  выход ИНС с данными скорости Vζ соединен с первым входом пятнадцатого устройства умножения, к второму входу которого подключен выход ФИО с оценкой скорости дрейфа
выход ИНС с данными скорости Vζ соединен с первым входом пятнадцатого устройства умножения, к второму входу которого подключен выход ФИО с оценкой скорости дрейфа  выход навигационного вычислителя с данными угловой скорости Uζ подключен к первому входу шестнадцатого устройства умножения, к выходу которого подсоединен первый суммирующий вход семнадцатого сумматора, выход пятнадцатого устройства умножения соединен с вторым суммирующим входом семнадцатого сумматора, выход которого подсоединен к суммирующему входу восемнадцатого сумматора, выход ИНС с данными скорости Vη подключен к первому входу семнадцатого устройства умножения, к выходу которого подсоединен вычитающий вход восемнадцатого сумматора, выход восемнадцатого сумматора подключен к суммирующему входу восьмого сумматора; в вычислительном устройстве для формирования оценок в боковом канале ГП выполнены пятнадцать сумматоров, семнадцать устройств умножения, три устройства деления, три интегратора, выход навигационного вычислителя с данными скорости Vy подключен к суммирующему входу первого сумматора, к вычитающему входу которого подсоединен выход навигационного вычислителя с данными скорости VηK, выход первого сумматора подсоединен к суммирующему входу второго сумматора, выход которого соединен с первыми входами первого, второго и третьего устройств умножения, с вторыми входами четвертого, седьмого и одиннадцатого устройств умножения в вычислительном устройстве формирования оценок в продольном канале ГП, выход регистра хранения с оптимальным коэффициентом усиления К22 подключен к второму входу первого устройства умножения, к выходу которого подсоединен первый суммирующий вход третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления К21 соединен с первым входом четвертого устройства умножения, выход которого подключен к второму суммирующему входу третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления К62 подключен к второму входу третьего устройства умножения, выход которого соединен с первым суммирующим входом четвертого сумматора, к выходу регистра хранения с оптимальным коэффициентом усиления K61 подсоединен первый вход пятого устройства умножения, к выходу которого подключен второй суммирующий вход четвертого сумматора, выход четвертого сумматора подключен к входу первого интегратора, выход которого подключен к первым входам пятого сумматора и шестого устройства умножения и является выходом ФИО с оценкой скорости дрейфа , выход регистра хранения с оптимальным коэффициентом усиления K32 соединен с вторым входом второго устройства умножения, к выходу которого подсоединен первый суммирующий вход шестого сумматора, выход регистра хранения с оптимальным коэффициентом усиления К31 подсоединен к первому входу седьмого устройства умножения, выход которого соединен с вторым суммирующим входом шестого сумматора, к выходу шестого сумматора подключен второй суммирующий вход пятого сумматора, выход ИНС с данными скорости Vζ соединен с вторым входом шестого устройства умножения, к выходу которого подключен первый суммирующий вход седьмого сумматора, выход ИНС с данными скорости Vξ подключен к первому входу восьмого устройства умножения, выход которого соединен с вторым суммирующим входом седьмого сумматора, выход седьмого сумматора подсоединен к вычитающему входу третьего сумматора, к выходу которого подключен первый суммирующий вход восьмого сумматора, к вторым входам четвертого, пятого и седьмого устройств умножения подключен выход второго сумматора в вычислительном устройстве формирования оценок в продольном канале ГП, выход ИНС с данными скорости Vζ подсоединен к первому входу девятого устройства умножения, к второму входу которого подключен выход навигационного вычислителя с данными скорости Uζ, выход девятого устройства умножения соединен с первым входом десятого устройства умножения, второй вход которого подсоединен к выходу ФИО с оценкой угла рассогласования
выход навигационного вычислителя с данными угловой скорости Uζ подключен к первому входу шестнадцатого устройства умножения, к выходу которого подсоединен первый суммирующий вход семнадцатого сумматора, выход пятнадцатого устройства умножения соединен с вторым суммирующим входом семнадцатого сумматора, выход которого подсоединен к суммирующему входу восемнадцатого сумматора, выход ИНС с данными скорости Vη подключен к первому входу семнадцатого устройства умножения, к выходу которого подсоединен вычитающий вход восемнадцатого сумматора, выход восемнадцатого сумматора подключен к суммирующему входу восьмого сумматора; в вычислительном устройстве для формирования оценок в боковом канале ГП выполнены пятнадцать сумматоров, семнадцать устройств умножения, три устройства деления, три интегратора, выход навигационного вычислителя с данными скорости Vy подключен к суммирующему входу первого сумматора, к вычитающему входу которого подсоединен выход навигационного вычислителя с данными скорости VηK, выход первого сумматора подсоединен к суммирующему входу второго сумматора, выход которого соединен с первыми входами первого, второго и третьего устройств умножения, с вторыми входами четвертого, седьмого и одиннадцатого устройств умножения в вычислительном устройстве формирования оценок в продольном канале ГП, выход регистра хранения с оптимальным коэффициентом усиления К22 подключен к второму входу первого устройства умножения, к выходу которого подсоединен первый суммирующий вход третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления К21 соединен с первым входом четвертого устройства умножения, выход которого подключен к второму суммирующему входу третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления К62 подключен к второму входу третьего устройства умножения, выход которого соединен с первым суммирующим входом четвертого сумматора, к выходу регистра хранения с оптимальным коэффициентом усиления K61 подсоединен первый вход пятого устройства умножения, к выходу которого подключен второй суммирующий вход четвертого сумматора, выход четвертого сумматора подключен к входу первого интегратора, выход которого подключен к первым входам пятого сумматора и шестого устройства умножения и является выходом ФИО с оценкой скорости дрейфа , выход регистра хранения с оптимальным коэффициентом усиления K32 соединен с вторым входом второго устройства умножения, к выходу которого подсоединен первый суммирующий вход шестого сумматора, выход регистра хранения с оптимальным коэффициентом усиления К31 подсоединен к первому входу седьмого устройства умножения, выход которого соединен с вторым суммирующим входом шестого сумматора, к выходу шестого сумматора подключен второй суммирующий вход пятого сумматора, выход ИНС с данными скорости Vζ соединен с вторым входом шестого устройства умножения, к выходу которого подключен первый суммирующий вход седьмого сумматора, выход ИНС с данными скорости Vξ подключен к первому входу восьмого устройства умножения, выход которого соединен с вторым суммирующим входом седьмого сумматора, выход седьмого сумматора подсоединен к вычитающему входу третьего сумматора, к выходу которого подключен первый суммирующий вход восьмого сумматора, к вторым входам четвертого, пятого и седьмого устройств умножения подключен выход второго сумматора в вычислительном устройстве формирования оценок в продольном канале ГП, выход ИНС с данными скорости Vζ подсоединен к первому входу девятого устройства умножения, к второму входу которого подключен выход навигационного вычислителя с данными скорости Uζ, выход девятого устройства умножения соединен с первым входом десятого устройства умножения, второй вход которого подсоединен к выходу ФИО с оценкой угла рассогласования  выход десятого устройства умножения подключен к первому суммирующему входу девятого сумматора, к выходу которого подсоединен вычитающий вход восьмого сумматора, выход навигационного вычислителя с данными скорости Uζ подключен к первому входу одиннадцатого устройства умножения, выход которого подключен к второму суммирующему входу девятого сумматора, выход ИНС с данными скорости Vη подсоединен к первому входу двенадцатого устройства умножения, а к его второму входу подключен выход навигационного вычислителя с данными угловой скорости ωζ, выход двенадцатого устройства умножения соединен с первым суммирующим входом десятого сумматора, к второму суммирующему входу которого подключен выход навигационного вычислителя с данными проекции gζ вектора ускорения свободного падения, к выходу десятого сумматора подключен первый вход тринадцатого устройства умножения, к второму входу которого подсоединен выход ФИО с оценкой угла рассогласования
выход десятого устройства умножения подключен к первому суммирующему входу девятого сумматора, к выходу которого подсоединен вычитающий вход восьмого сумматора, выход навигационного вычислителя с данными скорости Uζ подключен к первому входу одиннадцатого устройства умножения, выход которого подключен к второму суммирующему входу девятого сумматора, выход ИНС с данными скорости Vη подсоединен к первому входу двенадцатого устройства умножения, а к его второму входу подключен выход навигационного вычислителя с данными угловой скорости ωζ, выход двенадцатого устройства умножения соединен с первым суммирующим входом десятого сумматора, к второму суммирующему входу которого подключен выход навигационного вычислителя с данными проекции gζ вектора ускорения свободного падения, к выходу десятого сумматора подключен первый вход тринадцатого устройства умножения, к второму входу которого подсоединен выход ФИО с оценкой угла рассогласования  выход тринадцатого устройства умножения подсоединен к второму суммирующему входу восьмого сумматора, выход которого соединен с входом второго интегратора, выход второго интегратора подключен к суммирующему входу одиннадцатого сумматора и к первому входу первого устройства деления и является выходом ФИО с оценкой погрешности скорости
выход тринадцатого устройства умножения подсоединен к второму суммирующему входу восьмого сумматора, выход которого соединен с входом второго интегратора, выход второго интегратора подключен к суммирующему входу одиннадцатого сумматора и к первому входу первого устройства деления и является выходом ФИО с оценкой погрешности скорости  выход ИНС с данными скорости Vξ подключен к первому входу четырнадцатого устройства умножения, к выходу которого подсоединен вычитающий вход одиннадцатого сумматора, выход одиннадцатого сумматора подсоединен к первому суммирующему входу двенадцатого сумматора, второй суммирующий вход которого подключен к выходу пятнадцатого устройства умножения, выход ИНС с данными скорости Vζ подсоединен к первому входу пятнадцатого устройства умножения, к его второму входу подсоединен выход ФИО с оценкой угла рассогласования , выход двенадцатого сумматора подключен к вычитающему входу второго сумматора, выход навигационного вычислителя с данными угловой скорости Uζ соединен с первым входом шестнадцатого устройства умножения, а к его второму входу подсоединен выход ФИО с оценкой угла рассогласования
выход ИНС с данными скорости Vξ подключен к первому входу четырнадцатого устройства умножения, к выходу которого подсоединен вычитающий вход одиннадцатого сумматора, выход одиннадцатого сумматора подсоединен к первому суммирующему входу двенадцатого сумматора, второй суммирующий вход которого подключен к выходу пятнадцатого устройства умножения, выход ИНС с данными скорости Vζ подсоединен к первому входу пятнадцатого устройства умножения, к его второму входу подсоединен выход ФИО с оценкой угла рассогласования , выход двенадцатого сумматора подключен к вычитающему входу второго сумматора, выход навигационного вычислителя с данными угловой скорости Uζ соединен с первым входом шестнадцатого устройства умножения, а к его второму входу подсоединен выход ФИО с оценкой угла рассогласования  выход шестнадцатого устройства умножения подключен к первому суммирующему входу тринадцатого сумматора, к вычитающему входу которого подключен выход первого устройства деления, выход ИНС с данными скорости Vζ подсоединен к первому входу второго устройства деления, выход которого подключен к суммирующему входу четырнадцатого сумматора, вычитающий вход четырнадцатого сумматора соединен с выходом навигационного вычислителя с данными угловой скорости ωη, выход четырнадцатого сумматора подключен к первому входу семнадцатого устройства умножения, к выходу которого подсоединен второй суммирующий вход тринадцатого сумматора, к выходу тринадцатого сумматора подключен первый суммирующий вход пятнадцатого сумматора, к второму суммирующему входу которого подсоединен выход пятого сумматора, первый вход третьего устройства деления соединен с выходом ИНС с данными скорости Vζ, выход третьего устройства деления подключен к вычитающему входу пятнадцатого сумматора, выход которого соединен с входом третьего интегратора, выход третьего интегратора предназначен для выхода ФИО с оценкой угла рассогласования , к вторым входам первого, второго и третьего устройств деления подключен выход навигационного вычислителя с данными радиуса кривизны Rη земного эллипсоида, выход второго интегратора подключен к второму входу шестнадцатого устройства умножения в вычислительном устройстве формирования оценок в продольном канале ГП, к второму входу одиннадцатого устройства умножения подсоединен выход второго интегратора в вычислительном устройстве формирования оценок в продольном канале ГП; в вычислительном устройстве формирования оценок в азимутальном канале ГП выполнены четыре сумматора, шесть устройств умножения, два интегратора, выход регистра хранения с оптимальным коэффициентом усиления К51 подключен к первому входу первого устройства умножения, выход которого соединен с первым суммирующим входом первого сумматора, к выходу регистра хранения с оптимальным коэффициентом усиления К52 подсоединен первый вход второго устройства умножения, выход которого соединен с вторым суммирующим входом первого сумматора, выход навигационного вычислителя с данными угловой скорости ωζ подключен к первому входу третьего устройства умножения, к второму входу которого подсоединен выход ФИО с оценкой угла рассогласования
выход шестнадцатого устройства умножения подключен к первому суммирующему входу тринадцатого сумматора, к вычитающему входу которого подключен выход первого устройства деления, выход ИНС с данными скорости Vζ подсоединен к первому входу второго устройства деления, выход которого подключен к суммирующему входу четырнадцатого сумматора, вычитающий вход четырнадцатого сумматора соединен с выходом навигационного вычислителя с данными угловой скорости ωη, выход четырнадцатого сумматора подключен к первому входу семнадцатого устройства умножения, к выходу которого подсоединен второй суммирующий вход тринадцатого сумматора, к выходу тринадцатого сумматора подключен первый суммирующий вход пятнадцатого сумматора, к второму суммирующему входу которого подсоединен выход пятого сумматора, первый вход третьего устройства деления соединен с выходом ИНС с данными скорости Vζ, выход третьего устройства деления подключен к вычитающему входу пятнадцатого сумматора, выход которого соединен с входом третьего интегратора, выход третьего интегратора предназначен для выхода ФИО с оценкой угла рассогласования , к вторым входам первого, второго и третьего устройств деления подключен выход навигационного вычислителя с данными радиуса кривизны Rη земного эллипсоида, выход второго интегратора подключен к второму входу шестнадцатого устройства умножения в вычислительном устройстве формирования оценок в продольном канале ГП, к второму входу одиннадцатого устройства умножения подсоединен выход второго интегратора в вычислительном устройстве формирования оценок в продольном канале ГП; в вычислительном устройстве формирования оценок в азимутальном канале ГП выполнены четыре сумматора, шесть устройств умножения, два интегратора, выход регистра хранения с оптимальным коэффициентом усиления К51 подключен к первому входу первого устройства умножения, выход которого соединен с первым суммирующим входом первого сумматора, к выходу регистра хранения с оптимальным коэффициентом усиления К52 подсоединен первый вход второго устройства умножения, выход которого соединен с вторым суммирующим входом первого сумматора, выход навигационного вычислителя с данными угловой скорости ωζ подключен к первому входу третьего устройства умножения, к второму входу которого подсоединен выход ФИО с оценкой угла рассогласования  выход третьего устройства умножения соединен с вычитающим входом второго сумматора, к суммирующему входу которого подсоединен выход первого сумматора, выход регистра хранения с оптимальным коэффициентом усиления K81 подсоединен к первому входу четвертого устройства умножения, выход которого подключен к первому суммирующему входу третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления К82 подключен к первому входу пятого устройства умножения, выход которого соединен с вторым суммирующим входом третьего сумматора, к выходу третьего сумматора подключен вход первого интегратора, выход которого соединен с первым суммирующим входом четвертого сумматора и является выходом ФИО с оценкой скорости дрейфа
выход третьего устройства умножения соединен с вычитающим входом второго сумматора, к суммирующему входу которого подсоединен выход первого сумматора, выход регистра хранения с оптимальным коэффициентом усиления K81 подсоединен к первому входу четвертого устройства умножения, выход которого подключен к первому суммирующему входу третьего сумматора, выход регистра хранения с оптимальным коэффициентом усиления К82 подключен к первому входу пятого устройства умножения, выход которого соединен с вторым суммирующим входом третьего сумматора, к выходу третьего сумматора подключен вход первого интегратора, выход которого соединен с первым суммирующим входом четвертого сумматора и является выходом ФИО с оценкой скорости дрейфа  выход навигационного вычислителя с данными угловой скорости ωη подсоединен к первому входу шестого устройства умножения, к второму входу которого подключен выход ФИО с оценкой угла рассогласования , выход второго сумматора подключен к второму суммирующему входу четвертого сумматора, третий суммирующий вход которого соединен с выходом шестого устройства умножения, выход четвертого сумматора соединен с входом второго интегратора, выход которого является выходом ФИО с оценкой угла рассогласования , к вторым входам второго и пятого устройств умножения подсоединен выход второго сумматора в вычислительном устройстве формирования оценок в боковом канале ГП, к вторым входам первого и четвертого устройств умножения подключен выход второго сумматора в вычислительном устройстве формирования оценок в продольном канале ГП, выход первого интегратора соединен с вторым входом семнадцатого устройства умножения в вычислительном устройстве формирования оценок в продольном канале ГП, вторым входом восьмого устройства умножения в вычислительном устройстве формирования оценок в боковом канале ГП, выход второго интегратора подключен к вторым входам пятого и четырнадцатого устройств умножения в вычислительном устройстве формирования оценок в продольном канале ГП и вторым входам четырнадцатого и семнадцатого устройств умножения в вычислительном устройстве формирования оценок в боковом канале ГП; в вычислительном устройстве для преобразования измеренных с помощью источника сигналов коррекции ИНС скоростей Wx, Wy, Wz в проекции на оси опорного трехгранника ГП VξK, VηK выполнены десять сумматоров и двадцать одно устройство умножения, к первому входу первого устройства умножения подключен выход вычислительного устройства тригонометрических функций с данными cosφ, выход ПЗУ с данными угловой скорости U Земли подсоединен к второму входу первого устройства умножения, к выходу которого подключен первый вход второго устройства умножения, выход вычислительного устройства с данными радиуса кривизны параллели RE подсоединен к второму входу второго устройства умножения, выход которого подсоединен к первым входам третьего и четвертого устройств умножения, выход вычислительного устройства тригонометрических функций с данными sinχ подключен к второму входу третьего устройства умножения, к выходу которого подсоединен первый суммирующий вход первого сумматора, к первым входам пятого, шестого и седьмого устройств умножения подсоединен выход вычислительного устройства тригонометрических функций с данными cosΨГ, выход вычислительного устройства тригонометрических функций с данными cosυ подсоединен к второму входу пятого устройства умножения, выход пятого устройства умножения соединен с первым входом восьмого устройства умножения, выход которого подключен к второму суммирующему входу первого сумматора, выход источника сигналов коррекции ИНС с данными скорости Wx подключен к второму входу восьмого устройства умножения и к первому входу девятого устройства умножения, к выходу вычислительного устройства тригонометрических функций с данными sinυ подсоединены второй вход шестого устройства умножения и первый вход десятого устройства умножения, выход шестого устройства умножения соединен с первыми входами одиннадцатого, двенадцатого и тринадцатого устройств умножения, выход одиннадцатого устройства умножения подключен к первому суммирующему входу второго сумматора, к выходу которого подсоединен первый вход четырнадцатого устройства умножения, выход вычислительного устройства тригонометрических функций с данными cosγ подключен к вторым входам седьмого и одиннадцатого устройств умножения, к первым входам пятнадцатого и шестнадцатого устройств умножения, к второму входу четырнадцатого устройства умножения и к первому входу семнадцатого устройства умножения подсоединен выход источника сигналов коррекции ИНС с данными скорости Wy, выход четырнадцатого устройства умножения подключен к вычитающему входу третьего сумматора, к суммирующему входу которого подсоединен выход первого сумматора, выход вычислительного устройства тригонометрических функций с данными sinΨГ подсоединен к первому входу восемнадцатого устройства умножения и к вторым входам десятого и шестнадцатого устройств умножения, к выходу вычислительного устройства тригонометрических функций с данными sinγ подсоединены первый вход девятнадцатого устройства умножения и вторые входы двенадцатого, тринадцатого и восемнадцатого устройств умножения, к выходу восемнадцатого устройства умножения подключен второй суммирующий вход второго сумматора, выход десятого устройства умножения подсоединен к вторым входам девятого, пятнадцатого и девятнадцатого устройств умножения, выход вычислительного устройства тригонометрических функций с данными cosχ подключен к второму входу четвертого устройства умножения, выход которого соединен с суммирующим входом четвертого сумматора, к вычитающему входу которого подсоединен выход девятого устройства умножения, к выходу пятнадцатого устройства умножения подсоединен суммирующий вход пятого сумматора, вычитающий вход которого подключен к выходу двенадцатого устройства умножения, выход пятого сумматора соединен с вторым входом семнадцатого устройства умножения, выход которого подключен к первому суммирующему входу шестого сумматора, второй суммирующий вход которого соединен с выходом четвертого сумматора, к первым входам двадцатого и двадцать первого устройств умножения подсоединен выход источника сигналов коррекции ИНС с данными скорости Wz, к выходу тринадцатого устройства умножения подключен суммирующий вход седьмого сумматора, а его вычитающий вход соединен с выходом шестнадцатого устройства умножения, выход седьмого сумматора подсоединен к второму входу двадцатого устройства умножения, выход которого подключен к первому суммирующему входу восьмого сумматора, к выходу третьего сумматора подключен второй суммирующий вход восьмого сумматора, выход которого является выходом навигационного вычислителя с данными скорости VζK, выход девятнадцатого устройства умножения соединен с первым суммирующим входом девятого сумматора, к второму суммирующему входу которого подключен выход седьмого устройства умножения, выход девятого сумматора подсоединен к второму входу двадцать первого устройства умножения, выход которого подключен к вычитающему входу десятого сумматора, выход шестого сумматора подключен к суммирующему входу десятого сумматора, выход которого является выходом навигационного вычислителя с данными скорости VηK; вычислитель поправок выполнен в составе вычислительного устройства тригонометрических функций с подключенными к его входам выходами навигационного вычислителя с данными азимута χ и географической долготы φ, семи сумматоров, шестнадцати устройств умножения, устройства деления, трех пороговых устройств, трех ключей, генератора пилообразных колебаний, трех аналогово-цифровых преобразователей (АЦП), выход ФИО с оценкой угла рассогласования подключен к первым входам первого и второго устройств умножения, выход вычислительного устройства тригонометрических функций с данными cosχ подсоединен к второму входу первого устройства умножения и к первым входам третьего, четвертого и пятого устройств умножения, выход вычислительного устройства тригонометрических функций с данными sinχ подключен к второму входу второго устройства умножения и к первым входам шестого, седьмого и восьмого устройств умножения, выход ФИО с оценкой угла рассогласования подсоединен к вторым входам третьего и шестого устройств умножения, выход шестого устройства умножения соединен с вычитающим входом первого сумматора, выход ФИО с оценкой скорости дрейфа подключен к вторым входам пятого и седьмого устройств умножения, выход ФИО с оценкой скорости дрейфа подсоединен к вторым входам четвертого и восьмого устройств умножения, к выходу седьмого устройства умножения подсоединен первый суммирующий вход второго сумматора, второй суммирующий вход которого соединен с выходом четвертого устройства умножения, выход второго сумматора соединен с первым входом девятого устройства умножения, к выходу которого подключен вычитающий вход третьего сумматора, выход генератора пилообразных колебаний подключен к входам первого, второго и третьего ключей, к выходу первого ключа подсоединен вход первого порогового устройства, выход которого соединен с входом первого АЦП, второй вход девятого устройства умножения соединен с выходом первого АЦП, выход второго устройства умножения подключен к первому суммирующему входу четвертого сумматора, второй суммирующий вход которого соединен с выходом третьего устройства умножения, к выходу вычислительного устройства тригонометрических функций с данными cosφ подсоединен вход устройства деления, к выходу которого подключены первые входы десятого, одиннадцатого и двенадцатого устройства умножения, выход восьмого устройства умножения соединен с вычитающим входом пятого сумматора, суммирующий вход которого подключен к выходу пятого устройства умножения, к выходу второго ключа подсоединен вход второго порогового устройства, к выходу которого подключен вход АЦП, к первому входу тринадцатого устройства умножения подсоединен выход второго АЦП, выход пятого сумматора соединен с вторым входом одиннадцатого устройства умножения, выход которого подсоединен к второму входу тринадцатого устройства умножения, к выходу тринадцатого устройства умножения подключен вычитающий вход шестого сумматора, суммирующий вход которого подсоединен к выходу десятого устройства умножения, к первому суммирующем входу седьмого сумматора подсоединен выход шестого сумматора, выход третьего ключа подключен к входу третьего порогового устройства, выход которого соединен с входом третьего АЦП, к выходу третьего АЦП подсоединен второй вход двенадцатого устройства умножения, к выходу которого подключен первый вход четырнадцатого устройства умножения, выход навигационного вычислителя с данными угловой скорости UN соединен с вторым входом четырнадцатого устройства умножения, выход которого подсоединен с первым входом пятнадцатого устройства умножения, выход вычислительного устройства тригонометрических функций с данными tgφ подключен к второму входу пятнадцатого устройства умножения, к первому входу шестнадцатого устройства умножения подсоединен выход пятнадцатого устройства умножения, выход третьего сумматора подключен к второму входу шестнадцатого устройства умножения и является выходом значения коррекции географической широты, к выходу шестнадцатого устройства умножения подсоединен второй суммирующий вход седьмого сумматора, выход которого является выходом значения коррекции географической долготы; в устройстве коррекции в навигационном вычислителе выполнены первый и второй сумматоры, выход вычислительного устройства с данными счисленной широты подключен к суммирующему входу первого сумматора, а к его вычитающему входу подсоединен выход третьего сумматора в вычислителе поправок, выход первого сумматора является выходом откорректированного значения географической широты, выход вычислительного устройства с данными счисленной долготы подсоединен к суммирующему входу второго сумматора, к вычитающему входу которого подключен выход седьмого сумматора вычислителя поправок, выход второго сумматора является выходом откорректированного значения географической долготы.
выход навигационного вычислителя с данными угловой скорости ωη подсоединен к первому входу шестого устройства умножения, к второму входу которого подключен выход ФИО с оценкой угла рассогласования , выход второго сумматора подключен к второму суммирующему входу четвертого сумматора, третий суммирующий вход которого соединен с выходом шестого устройства умножения, выход четвертого сумматора соединен с входом второго интегратора, выход которого является выходом ФИО с оценкой угла рассогласования , к вторым входам второго и пятого устройств умножения подсоединен выход второго сумматора в вычислительном устройстве формирования оценок в боковом канале ГП, к вторым входам первого и четвертого устройств умножения подключен выход второго сумматора в вычислительном устройстве формирования оценок в продольном канале ГП, выход первого интегратора соединен с вторым входом семнадцатого устройства умножения в вычислительном устройстве формирования оценок в продольном канале ГП, вторым входом восьмого устройства умножения в вычислительном устройстве формирования оценок в боковом канале ГП, выход второго интегратора подключен к вторым входам пятого и четырнадцатого устройств умножения в вычислительном устройстве формирования оценок в продольном канале ГП и вторым входам четырнадцатого и семнадцатого устройств умножения в вычислительном устройстве формирования оценок в боковом канале ГП; в вычислительном устройстве для преобразования измеренных с помощью источника сигналов коррекции ИНС скоростей Wx, Wy, Wz в проекции на оси опорного трехгранника ГП VξK, VηK выполнены десять сумматоров и двадцать одно устройство умножения, к первому входу первого устройства умножения подключен выход вычислительного устройства тригонометрических функций с данными cosφ, выход ПЗУ с данными угловой скорости U Земли подсоединен к второму входу первого устройства умножения, к выходу которого подключен первый вход второго устройства умножения, выход вычислительного устройства с данными радиуса кривизны параллели RE подсоединен к второму входу второго устройства умножения, выход которого подсоединен к первым входам третьего и четвертого устройств умножения, выход вычислительного устройства тригонометрических функций с данными sinχ подключен к второму входу третьего устройства умножения, к выходу которого подсоединен первый суммирующий вход первого сумматора, к первым входам пятого, шестого и седьмого устройств умножения подсоединен выход вычислительного устройства тригонометрических функций с данными cosΨГ, выход вычислительного устройства тригонометрических функций с данными cosυ подсоединен к второму входу пятого устройства умножения, выход пятого устройства умножения соединен с первым входом восьмого устройства умножения, выход которого подключен к второму суммирующему входу первого сумматора, выход источника сигналов коррекции ИНС с данными скорости Wx подключен к второму входу восьмого устройства умножения и к первому входу девятого устройства умножения, к выходу вычислительного устройства тригонометрических функций с данными sinυ подсоединены второй вход шестого устройства умножения и первый вход десятого устройства умножения, выход шестого устройства умножения соединен с первыми входами одиннадцатого, двенадцатого и тринадцатого устройств умножения, выход одиннадцатого устройства умножения подключен к первому суммирующему входу второго сумматора, к выходу которого подсоединен первый вход четырнадцатого устройства умножения, выход вычислительного устройства тригонометрических функций с данными cosγ подключен к вторым входам седьмого и одиннадцатого устройств умножения, к первым входам пятнадцатого и шестнадцатого устройств умножения, к второму входу четырнадцатого устройства умножения и к первому входу семнадцатого устройства умножения подсоединен выход источника сигналов коррекции ИНС с данными скорости Wy, выход четырнадцатого устройства умножения подключен к вычитающему входу третьего сумматора, к суммирующему входу которого подсоединен выход первого сумматора, выход вычислительного устройства тригонометрических функций с данными sinΨГ подсоединен к первому входу восемнадцатого устройства умножения и к вторым входам десятого и шестнадцатого устройств умножения, к выходу вычислительного устройства тригонометрических функций с данными sinγ подсоединены первый вход девятнадцатого устройства умножения и вторые входы двенадцатого, тринадцатого и восемнадцатого устройств умножения, к выходу восемнадцатого устройства умножения подключен второй суммирующий вход второго сумматора, выход десятого устройства умножения подсоединен к вторым входам девятого, пятнадцатого и девятнадцатого устройств умножения, выход вычислительного устройства тригонометрических функций с данными cosχ подключен к второму входу четвертого устройства умножения, выход которого соединен с суммирующим входом четвертого сумматора, к вычитающему входу которого подсоединен выход девятого устройства умножения, к выходу пятнадцатого устройства умножения подсоединен суммирующий вход пятого сумматора, вычитающий вход которого подключен к выходу двенадцатого устройства умножения, выход пятого сумматора соединен с вторым входом семнадцатого устройства умножения, выход которого подключен к первому суммирующему входу шестого сумматора, второй суммирующий вход которого соединен с выходом четвертого сумматора, к первым входам двадцатого и двадцать первого устройств умножения подсоединен выход источника сигналов коррекции ИНС с данными скорости Wz, к выходу тринадцатого устройства умножения подключен суммирующий вход седьмого сумматора, а его вычитающий вход соединен с выходом шестнадцатого устройства умножения, выход седьмого сумматора подсоединен к второму входу двадцатого устройства умножения, выход которого подключен к первому суммирующему входу восьмого сумматора, к выходу третьего сумматора подключен второй суммирующий вход восьмого сумматора, выход которого является выходом навигационного вычислителя с данными скорости VζK, выход девятнадцатого устройства умножения соединен с первым суммирующим входом девятого сумматора, к второму суммирующему входу которого подключен выход седьмого устройства умножения, выход девятого сумматора подсоединен к второму входу двадцать первого устройства умножения, выход которого подключен к вычитающему входу десятого сумматора, выход шестого сумматора подключен к суммирующему входу десятого сумматора, выход которого является выходом навигационного вычислителя с данными скорости VηK; вычислитель поправок выполнен в составе вычислительного устройства тригонометрических функций с подключенными к его входам выходами навигационного вычислителя с данными азимута χ и географической долготы φ, семи сумматоров, шестнадцати устройств умножения, устройства деления, трех пороговых устройств, трех ключей, генератора пилообразных колебаний, трех аналогово-цифровых преобразователей (АЦП), выход ФИО с оценкой угла рассогласования подключен к первым входам первого и второго устройств умножения, выход вычислительного устройства тригонометрических функций с данными cosχ подсоединен к второму входу первого устройства умножения и к первым входам третьего, четвертого и пятого устройств умножения, выход вычислительного устройства тригонометрических функций с данными sinχ подключен к второму входу второго устройства умножения и к первым входам шестого, седьмого и восьмого устройств умножения, выход ФИО с оценкой угла рассогласования подсоединен к вторым входам третьего и шестого устройств умножения, выход шестого устройства умножения соединен с вычитающим входом первого сумматора, выход ФИО с оценкой скорости дрейфа подключен к вторым входам пятого и седьмого устройств умножения, выход ФИО с оценкой скорости дрейфа подсоединен к вторым входам четвертого и восьмого устройств умножения, к выходу седьмого устройства умножения подсоединен первый суммирующий вход второго сумматора, второй суммирующий вход которого соединен с выходом четвертого устройства умножения, выход второго сумматора соединен с первым входом девятого устройства умножения, к выходу которого подключен вычитающий вход третьего сумматора, выход генератора пилообразных колебаний подключен к входам первого, второго и третьего ключей, к выходу первого ключа подсоединен вход первого порогового устройства, выход которого соединен с входом первого АЦП, второй вход девятого устройства умножения соединен с выходом первого АЦП, выход второго устройства умножения подключен к первому суммирующему входу четвертого сумматора, второй суммирующий вход которого соединен с выходом третьего устройства умножения, к выходу вычислительного устройства тригонометрических функций с данными cosφ подсоединен вход устройства деления, к выходу которого подключены первые входы десятого, одиннадцатого и двенадцатого устройства умножения, выход восьмого устройства умножения соединен с вычитающим входом пятого сумматора, суммирующий вход которого подключен к выходу пятого устройства умножения, к выходу второго ключа подсоединен вход второго порогового устройства, к выходу которого подключен вход АЦП, к первому входу тринадцатого устройства умножения подсоединен выход второго АЦП, выход пятого сумматора соединен с вторым входом одиннадцатого устройства умножения, выход которого подсоединен к второму входу тринадцатого устройства умножения, к выходу тринадцатого устройства умножения подключен вычитающий вход шестого сумматора, суммирующий вход которого подсоединен к выходу десятого устройства умножения, к первому суммирующем входу седьмого сумматора подсоединен выход шестого сумматора, выход третьего ключа подключен к входу третьего порогового устройства, выход которого соединен с входом третьего АЦП, к выходу третьего АЦП подсоединен второй вход двенадцатого устройства умножения, к выходу которого подключен первый вход четырнадцатого устройства умножения, выход навигационного вычислителя с данными угловой скорости UN соединен с вторым входом четырнадцатого устройства умножения, выход которого подсоединен с первым входом пятнадцатого устройства умножения, выход вычислительного устройства тригонометрических функций с данными tgφ подключен к второму входу пятнадцатого устройства умножения, к первому входу шестнадцатого устройства умножения подсоединен выход пятнадцатого устройства умножения, выход третьего сумматора подключен к второму входу шестнадцатого устройства умножения и является выходом значения коррекции географической широты, к выходу шестнадцатого устройства умножения подсоединен второй суммирующий вход седьмого сумматора, выход которого является выходом значения коррекции географической долготы; в устройстве коррекции в навигационном вычислителе выполнены первый и второй сумматоры, выход вычислительного устройства с данными счисленной широты подключен к суммирующему входу первого сумматора, а к его вычитающему входу подсоединен выход третьего сумматора в вычислителе поправок, выход первого сумматора является выходом откорректированного значения географической широты, выход вычислительного устройства с данными счисленной долготы подсоединен к суммирующему входу второго сумматора, к вычитающему входу которого подключен выход седьмого сумматора вычислителя поправок, выход второго сумматора является выходом откорректированного значения географической долготы.
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2003 |
|
RU2233431C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2362977C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263280C1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

