Изобретение относится к машиностроению и может быть использовано в машинах и агрегатах различных отраслей промышленности, в том числе и сельскохозяйственной технике.
Известен способ образования дифференциальных пространственных шарнирных механизмов, заключающийся в объединении особым образом двух или нескольких пространственных четырехзвенных механизмов (четырехзвенников) Беннетта, а также - в различной комбинации полученных на его базе пространственных пяти- и шестизвенников [1]. Однако такой способ позволяет получать механизмы с количеством звеньев не менее семи. Увеличение количества звеньев уменьшает жесткость механизма и повышает трудоемкость его изготовления, что можно отнести к недостаткам этого способа.
Технический результат - получение дифференциального пространственного механизма с минимальным количеством звеньев, повышение жесткости механизма, опорной устойчивости и упрощения его конструкции.
Указанный технический результат достигается тем, что пространственный четырехзвенник Беннета преобразуется в дифференциальный механизм за счет придания движения звену, которое в механизме Беннетта выполняло функцию стойки, этого можно добиться введением в конструкцию дополнительного ведущего (и опорного) кривошипа, у которого угол скрещивания α4 геометрических осей шарниров и кратчайшее расстояние  между ними равны углу скрещивания α2 и кратчайшему расстоянию
между ними равны углу скрещивания α2 и кратчайшему расстоянию  между геометрическими осями шарниров самого короткого звена - шатуна, причем позволяет создавать дифференциальные пространственные механизмы с меньшим числом звеньев (пяти- и шестизвенные), что упрощает конструкцию механизма и увеличивает ее жесткость, при этом введение в конструкцию механизма звена, имеющего те же параметры, что и еще одно звено механизма, ведет к унификации оснастки по изготовлению механизма, сокращению затрат на производство, кроме того, разнесение стойки на две самостоятельные соосные опоры позволяет повысить технологичность конструкции, жесткость ее и упростить приводы ведущих кривошипов.
между геометрическими осями шарниров самого короткого звена - шатуна, причем позволяет создавать дифференциальные пространственные механизмы с меньшим числом звеньев (пяти- и шестизвенные), что упрощает конструкцию механизма и увеличивает ее жесткость, при этом введение в конструкцию механизма звена, имеющего те же параметры, что и еще одно звено механизма, ведет к унификации оснастки по изготовлению механизма, сокращению затрат на производство, кроме того, разнесение стойки на две самостоятельные соосные опоры позволяет повысить технологичность конструкции, жесткость ее и упростить приводы ведущих кривошипов.
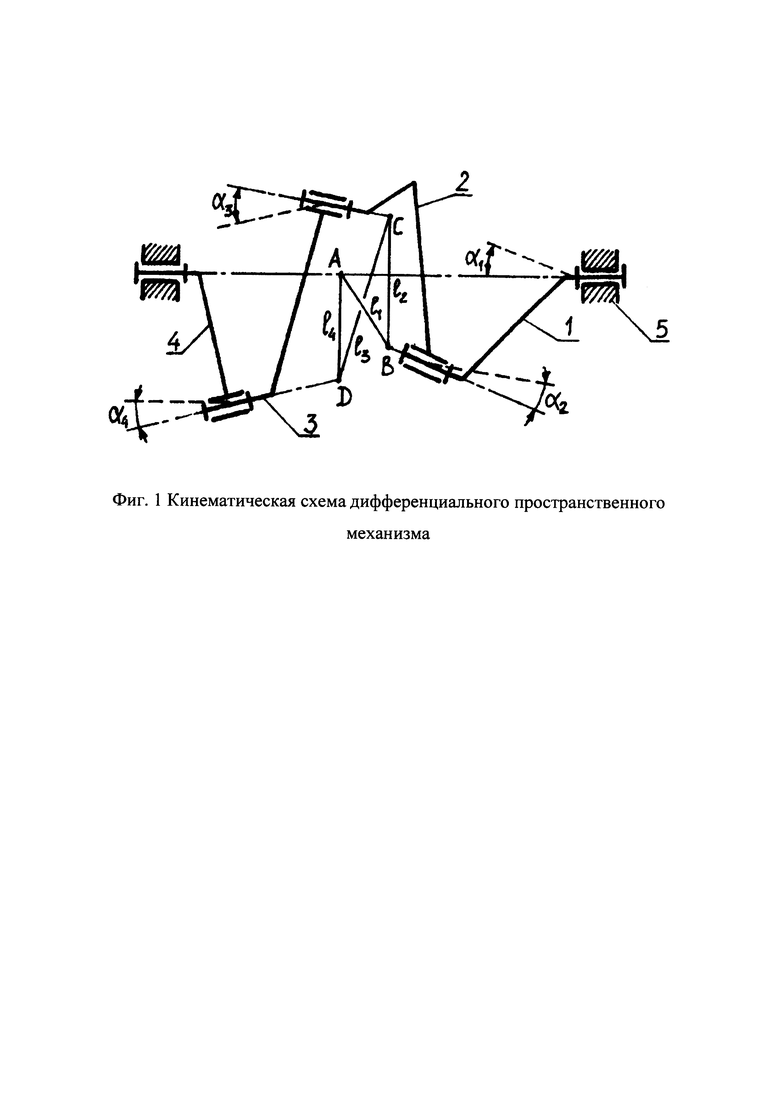
Способ образования дифференциальных пространственных шарнирных механизмов поясняется схемой: фиг. 1 - Кинематическая схема дифференциального пространственного механизма, общий вид.
Дифференциальный пространственный шарнирный механизм (фиг. 1) получен из пространственного четырехзвенника Беннета и содержит два ведущих кривошипа 1, 4, два шатуна 2, 3, стойку 5. Угол скрещивания α1 геометрических осей шарниров и кратчайшее расстояние  между ними ведущего кривошипа 1 равны углу скрещивания α3 и кратчайшему расстоянию
между ними ведущего кривошипа 1 равны углу скрещивания α3 и кратчайшему расстоянию  между геометрическими осями шарниров шатуна 3. Угол скрещивания α4 геометрических осей шарниров и кратчайшее расстояние
между геометрическими осями шарниров шатуна 3. Угол скрещивания α4 геометрических осей шарниров и кратчайшее расстояние  между ними ведущего кривошипа 4 равны углу скрещивания α2 и кратчайшему расстоянию
между ними ведущего кривошипа 4 равны углу скрещивания α2 и кратчайшему расстоянию  между геометрическими осями шарниров шатуна 2. Указанные параметры находятся в известной зависимости:
между геометрическими осями шарниров шатуна 2. Указанные параметры находятся в известной зависимости:
Оси вращения ведущих кривошипов лежат на одной прямой (она проходит через точку А), то есть их опоры 5 соосны. Расположение опор ведущих кривошипов позволяет достаточно просто подвести движение к каждому из них.
| название | год | авторы | номер документа |
|---|---|---|---|
| СМЕСИТЕЛЬ ДИФФЕРЕНЦИАЛЬНЫЙ | 2020 |
|
RU2758515C1 |
| ШЕСТИЗВЕННЫЙ ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2019 |
|
RU2713662C1 |
| СМЕСИТЕЛЬ СЫПУЧИХ МАТЕРИАЛОВ | 2020 |
|
RU2755685C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕШИВАНИЯ ЖИДКОСТЕЙ | 2016 |
|
RU2633902C1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2605955C1 |
| УСТРОЙСТВО ДЛЯ ГАЛТОВКИ ДЕТАЛЕЙ | 2022 |
|
RU2813522C2 |
| БАРАБАННЫЙ СМЕСИТЕЛЬ | 2013 |
|
RU2527993C1 |
| ПРОСТРАНСТВЕННЫЙ СМЕСИТЕЛЬ | 2023 |
|
RU2812926C1 |
| РЕЖУЩИЙ АППАРАТ ЖАТВЕННЫХ МАШИН | 2015 |
|
RU2606095C1 |
| МЕШАЛКА ДЛЯ ВЯЗКИХ ЖИДКОСТЕЙ | 2016 |
|
RU2633586C1 |
Изобретение относится к машиностроению. Способ образования дифференциальных пространственных шарнирных механизмов состоит в сообщении самому короткому звену пространственного четырехзвенного механизма Беннета – стойке движения за счет введения в конструкцию дополнительного ведущего кривошипа, у которого угол скрещивания геометрических осей шарниров и кратчайшее расстояние между ними равны углу скрещивания и кратчайшему расстоянию между геометрическими осями шарниров указанного звена – стойки четырёхзвенника Беннета, и разнесении новой стойки на две соосные опоры ведущих кривошипов. Обеспечивается повышение жесткости механизма и упрощение его конструкции. 1 ил.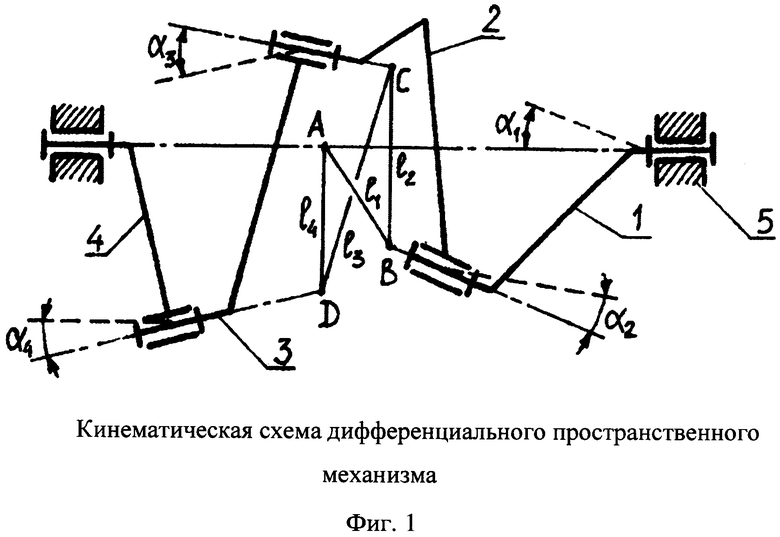
Способ образования дифференциальных пространственных шарнирных механизмов, состоящий в сообщении самому короткому звену пространственного четырехзвенного механизма Беннета – стойке движения за счет введения в конструкцию дополнительного ведущего кривошипа, у которого угол скрещивания геометрических осей шарниров и кратчайшее расстояние между ними равны углу скрещивания и кратчайшему расстоянию между геометрическими осями шарниров указанного звена – стойки четырёхзвенника Беннета, и разнесении новой стойки на две соосные опоры ведущих кривошипов.
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1992 |
|
RU2038248C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ В МАШИНЕ ОБЪЕМНОГО РАСШИРЕНИЯ (ВЫТЕСНЕНИЯ) И ОБЪЕМНАЯ МАШИНА ГОРБАНЯ-БРОДОВА | 1998 |
|
RU2134795C1 |
| JP 59065658 A, 13.04.1984 | |||
| JP 2011252578 A, 15.12.2011. | |||

