Область техники, к которой относится изобретение
Настоящее изобретение относится к сельскохозяйственной рабочей машине в соответствии с ограничительной частью пункта 1 формулы изобретения. Кроме того, изобретение относится к способу содействия рулевому управлению в соответствии с пунктом 10 формулы изобретения.
Уровень техники
Сельскохозяйственные рабочие машины, такие как тракторы, самоходные уборочные машины или транспортные средства для перемещения грунта обычно оснащены несколькими ходовыми осями, причем одна ходовая ось для изменения направления движения снабжена, например, управляемыми колесами, а изменение направления движения осуществляется по кругу поворота, задаваемому рулевым управлением колесами. Для замедления рабочие машины помимо рабочего тормоза, который обеспечивает равномерное замедление в направлении движения без бокового смещения, содержат так называемый тормоз поворота. Этот тормоз поворота обеспечивает возможность одностороннего торможения одного приводного колеса, так что при движении на местности машина может двигаться по более крутым кривым, чем при поворотах по кругу, определяемому управляемыми колесами. Для этого для содействия рулевому управлению приводные колеса на внутренней стороне кривой поворота могут подтормаживаться, тогда как на противоположной стороне транспортного средства колеса приводятся без торможения.
В современных рабочих машинах и машинах с приводом на все колеса с шинами больших размеров на передней ходовой оси и улучшенной балластировкой передних ходовых осей и, соответственно, с эффективной системой рулевого управления с поворотными кулаками тормоза поворота обычно используются на вязких грунтах и при неудачной балластировке, чтобы улучшать управляемость или обеспечивать малые круги поворота. Это позволяет, например, при разворотах на краю поля с поднятым рабочим оборудованием сзади и, соответственно, при снижении нагрузки на переднюю ходовую ось совершать развороты с очень малым радиусом.
Тормоза поворота этого типа известны из патентных документов DE 1270961 B и ЕР 2093111 A1, причем в каждом решении производится ручной привод в действие тормоза поворота оператором рабочей машины. Из патентного документа EP 0863062 B12 известна предназначенная для повышения безопасности движения трактора тормозная система, которая, в частности в тракторе с приводом на все колеса, обеспечивает возможность индивидуального и сгруппированного по сторонам управления тормозами для предотвращения блокировки колес даже в неблагоприятных условиях, в которых не срабатывают современные антиблокировочные системы.
Недостаток современных тормозов поворота состоит в необходимости ручного привода в действие и в частом дозировании усилия торможения. Для этой цели обычно предусмотрены две расположенные рядом друг с другом педали тормоза, которые могут приводиться по отдельности или совместно. Так, например, при нахождении на краю поля и при отсутствии системы автоматического управления на краю поля нагрузка на водителя может быть слишком высока, поскольку управление навесным оборудованием требует уже его полного внимания. Кроме того, дозирование тормозного усилия представляет собой непростую задачу, особенно при воздействии на тормоза посторонних усилий. Как правило, заднюю ходовую ось тормозят сильнее, чем это необходимо для получения на передней ходовой оси установленного угла рулевого поворота. Это приводит к прерывистому процессу рулевого управления и напряжениям в элементах ходового механизма.
Раскрытие изобретения
Соответственно, задачей настоящего изобретения является создание устройства для содействия рулевому управлению сельскохозяйственной рабочей машины, которое обеспечивает разгрузку оператора, улучшение управляемости и повышение надежности.
В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков пункта 1 формулы изобретения. Предпочтительные варианты осуществления изобретения изложены в зависимых пунктах.
Сельскохозяйственная рабочая машина содержит по меньшей мере одну первую ходовую ось и одну вторую ходовую ось, несколько расположенных на ходовых осях средств сцепления с грунтом, причем по меньшей мере часть средств сцепления с грунтом выполнены с возможностью приведения в действие посредством приводного двигателя, и/или выполнены управляемыми, в частности, посредством системы рулевого управления с поворотными кулаками, по меньшей мере один расположенный на управляемом средстве сцепления с грунтом датчик угла поворота для регистрации установленного угла рулевого поворота соответствующего средства сцепления с грунтом и по меньшей мере один тормоз поворота для избирательного торможения одного или нескольких, в частности приводных, средств сцепления с грунтом ходовой оси для содействия рулевому управлению, причем согласно изобретению предусмотрено устройство управления для управления и регулирования по меньшей мере одного тормоза поворота, при этом обеспечена возможность определения угла рулевого поворота и/или угла бокового увода по меньшей мере одного управляемого средства сцепления с грунтом, и тормоз поворота выполнен с возможностью управления и регулирования в зависимости от угла рулевого поворота и/или угла бокового увода.
Обычно сельскохозяйственная рабочая машина содержит несколько ходовых осей с расположенными на них средствами сцепления с грунтом для передвижения и рулевого управления рабочей машиной. Так, например, трактор может иметь первую и вторую ходовые оси, причем первая ходовая ось является передней ходовой осью, а вторая ходовая ось - задней ходовой осью с расположенными на них управляемыми и/или приводными средствами сцепления с грунтом. Рулевое управление средствами сцепления с грунтом, в частности на передней ходовой оси трактора, может производиться системой рулевого управления с поворотными кулаками. При этом оператором рабочей машины задается угол рулевого поворота для поворота управляемых средств сцепления с грунтом. Заданный угол рулевого поворота может регистрироваться по меньшей мере одним датчиком угла поворота по меньшей мере на одном управляемом средстве сцепления с грунтом. Помимо обычного управляемого средой под давлением, например гидравлического, рабочего тормоза, который используется, в частности, при дорожном движении и, по существу, обеспечивает возможность равномерного торможения рабочей машины по обеим сторонам, рабочая машина оснащена тормозом поворота. Тормоз поворота позволяет производить раздельное по сторонам торможение по меньшей мере одного средства сцепления с грунтом. Обычно в тракторе расположенные на задней ходовой оси приводные средства сцепления с грунтом разделены по сторонам и могут тормозиться по отдельности, за счет чего может создаваться разворачивающий момент для содействия управляемым средствам сцепления с грунтом. Это позволяет еще уменьшить круг поворота, определяемый управляемыми средствами сцепления с грунтом, например расположенными на передней ходовой оси, и за счет этого, например, реализовать на краю поля повороты очень малых радиусов. Посредством устройства управления, которое связано по меньшей мере с одним датчиком угла рулевого поворота и выполнено с возможностью управления и регулирования по меньшей мере одного тормоза поворота, можно в зависимости от, в частности установленного, угла рулевого поворота и/или угла бокового увода по меньшей мере одного управляемого средства сцепления с грунтом автоматически осуществлять избирательное торможение одного или нескольких, в частности приводных, средств сцепления с грунтом. При этом угол бокового увода определяется разностью между установленным (теоретическим) углом рулевого поворота и действительным углом рулевого поворота, который определяет действительное изменение направления движения рабочей машины. При этом тормозное усилие тормоза поворота может регулироваться в зависимости от угла рулевого поворота и/или угла бокового увода, соответствующим установленному углу рулевого поворота и/или углу бокового увода.
Благодаря автоматическому управлению и регулированию тормоза поворота в зависимости от угла рулевого поворота и/или угла бокового увода снижается нагрузка на оператора рабочей машины, так как отсутствует ручной привод в действие. Кроме того, автоматическая активация и управление тормозом поворота позволяет избежать ошибочного управления оператором, что может повысить безопасность. Активация, управление и регулирование тормоза поворота может производиться по мере надобности, что обеспечивает не только эффективное использование тормоза поворота, но также более точное регулирование соответствующих тормозных сцеплений, так что избыточное торможение и излишние напряжения приводной трансмиссии могут быть предотвращены. За счет этого может быть улучшено содействие рулевому управлению системы рулевого управления с поворотными кулаками и улучшена управляемость в трудных грунтовых условиях или при малой нагрузке на переднюю ходовую ось.
В предпочтительном варианте осуществления изобретения управление и регулирование тормоза поворота осуществляется по меньшей мере в зависимости от установленного угла рулевого поворота, выходного числа оборотов коробки передач рабочей машины и окружной скорости по меньшей мере одного приводного средства сцепления с грунтом, в частности внутреннего относительно кривой поворота. В тракторе приводные средства сцепления с грунтом расположены, например, на второй (задней) ходовой оси. Помимо установленного угла рулевого поворота, который может регистрироваться посредством по меньшей мере одного датчика рулевого поворота, например на внутреннем относительно кривой поворота приводном средстве сцепления с грунтом, на основе выходного числа оборотов коробки передач и окружной скорости по меньшей мере одного приводного средства сцепления с грунтом управление тормозами поворота может осуществляться на основе чисто геометрической схемы системы рулевого управления. Преимущество решения состоит в том, что управление и регулирование тормоза поворота осуществляется независимо от основания, по которому движется машина, и от конфигурации транспортного средства, поэтому оно более надежно на вязких основаниях.
В следующем предпочтительном варианте осуществления изобретения угол бокового увода по меньшей мере одного управляемого средства сцепления с грунтом определяется в зависимости от установленного угла рулевого поворота, геометрии рабочей машины и, в частности действительных, окружных скоростей, расположенных на приводной ходовой оси внутреннего и наружного относительно кривой поворота средств сцепления с грунтом. Создание угла бокового увода на управляемых средствах сцепления с грунтом необходимо для создания боковых направляющих усилий, причем движение рабочей машины происходит в направлении действительного угла рулевого поворота. Угол бокового увода соответствует разности между установленным углом рулевого поворота и действительным углом рулевого поворота средства сцепления с грунтом. Учет угла бокового увода при управлении и регулировании тормоза поворота обеспечивает возможность эффективного содействия системе рулевого управления, которая предпринимает торможение отдельного внутреннего относительно кривой поворота средства сцепления с грунтом лишь настолько, насколько это необходимо для действительного движения рулевого управления, а не в соответствии с теоретическим движением рулевого управления. При этом преимущество состоит в том, что большая часть разворачивающего момента для рулевого управления рабочей машиной генерируется через переднюю ходовую ось, а тормоз поворота содействует только действительному движению рулевого управления рабочей машины.
В особенно предпочтительном варианте осуществления изобретения активация тормоза поворота осуществляется в зависимости от соотношения между теоретической окружной скоростью и действительной окружной скоростью по меньшей мере одного приводного средства сцепления с грунтом. При этом в тракторе приводные средства сцепления с грунтом расположены, например, на задней (второй) ходовой оси. Соотношение окружных скоростей может быть задано оператором в качестве первой пороговой величины и, например, записано в устройстве управления. За счет этого может быть предотвращена чрезмерная активация тормоза поворота, при этом благодаря уменьшенному торможению может быть улучшена эффективность рабочей машины.
В следующем предпочтительном варианте осуществления изобретения активация тормоза поворота осуществляется в зависимости от предельной скорости движения, причем тормоз поворота может быть активирован при скорости движения ниже предельной. Предельная скорость, ниже которой может быть активирован тормоз поворота, может быть задана в качестве второй пороговой величины и записана в устройстве управления и/или установлена оператором. Благодаря второй зависящей от скорости движения пороговой величине может надежно обеспечиваться, что активация тормоза поворота возможна только при обработке поля с соответствующими низкими скоростями, например, ниже 15 км/час. Таким образом, может быть предотвращена активация тормоза поворота при скорости движения выше второй пороговой величины, например при дорожном движении, что значительно повышает безопасность дорожного движения рабочей машины. Дополнительно, активация тормоза поворота может осуществляться в зависимости от сигнала положения, например спутникового навигационного прибора, так что активация тормоза поворота может обеспечиваться на предварительно заданных площадях. При этом может дополнительно повышаться безопасность дорожного движения за счет того, что отпадает необходимость отсоединения педали тормоза, требуемого до сих пор для активации управляемого вручную тормоза поворота, а затем вновь ее подсоединения при дорожном движении, так что устраняются опасные ситуации при движении из-за подсоединенной или отсоединенной педали тормоза.
В особенно предпочтительном варианте осуществления изобретения активация тормоза поворота осуществляется в зависимости от предельного угла рулевого поворота и/или предельного угла бокового увода, причем тормоз поворота может быть активирован при их превышении. Предельный угол рулевого поворота и/или предельный угол бокового увода, при превышении которых может быть активирован тормоз поворота, могут быть заданы в качестве третьей пороговой величины и записаны в устройстве управления, и/или установлены оператором. За счет этого небольшие движения рулевого управления, например при установленном угле рулевого поворота меньше 10°, могут выполняться только посредством системы рулевого управления с поворотными кулаками первой (передней) оси, что устраняет чрезмерный привод в действие тормоза поворота с затратой приводной мощности и может повысить эффективность рабочей машины.
Рабочая машина предпочтительно оснащена гироскопом для регистрации угловой скорости рабочей машины, в частности для определения действительного угла рулевого поворота. Гироскоп может быть связан с устройством управления для определения угловой скорости рабочей машины, в частности вокруг мгновенного центра поворота и, в частности для определения действительного угла рулевого поворота. Благодаря этому угол бокового увода для управления и регулирования тормоза поворота может быть определен экономичным образом.
В особенно предпочтительном варианте осуществления изобретения предусмотрена, в частности спутниковая, навигационная система, по данным положения которой может регистрироваться радиус кривой движения по меньшей мере одной из ходовых осей, в частности для определения действительного угла рулевого поворота. Навигационная система, в частности спутниковая, может быть связана с устройством управления для определения радиуса кривой движения по меньшей мере одной из ходовых осей, например передней и/или задней ходовой оси, и, в частности для определения действительного угла рулевого поворота. Это позволяет экономичным образом определять по меньшей мере один радиус кривой, необходимый для управления и регулирования тормоза поворота на основе угла бокового увода. Кроме того, на основе данных положения навигационной системы возможно автоматическое использование тормоза поворота для содействия автоматическому процессу поворота даже при тяжелых грунтовых условиях или неблагоприятной конфигурации транспортного средства, например на краю поля.
Средство сцепления с грунтом предпочтительно выполнено в виде колеса или гусеничного ходового механизма. Сельскохозяйственная рабочая машина может быть оснащена средствами сцепления с грунтом, выполненными исключительно в виде колес или гусениц, или так называемого полугусеничного ходового механизма, в котором рабочая машина содержит как колеса, так и гусеничные ходовые механизмы. В рабочей машине на полугусеничном ходу управляемые колеса могут быть расположены, например, на первой (передней) ходовой оси, а на второй (задней) ходовой оси - приводные гусеничные ходовые механизмы. В частности, при полугусеничной конфигурации пропашного трактора могут использоваться преимущества обоих средств сцепления с грунтом. При этом передняя ходовая ось с обычной для тракторов системой рулевого управления колесами с поворотными кулаками предоставляет для оператора привычное и легко осваиваемое поведение рулевого управления. Небольшие корректировки курса и движение по кривой может выполняться без использования дорогостоящих дифференциальных механизмов управления поворотом, что обеспечивает возможность простой концепции транспортного средства с низкой стоимостью изготовления. Кроме того, управляемость рабочей машины при тяжелых грунтовых условиях или при высоком моменте сопротивления на задней ходовой оси, в частности из-за наличия на ней гусеничных ходовых механизмов, может быть улучшена посредством соответствующей автоматизированной активации тормоза поворота.
Изобретение относится также к способу содействия рулевому управлению сельскохозяйственной рабочей машины, содержащей по меньшей мере одну первую ходовую ось и одну вторую ходовую ось, несколько расположенных на ходовых осях средств сцепления с грунтом, причем по меньшей мере часть средств сцепления с грунтом выполнены с возможностью приведения в действие посредством приводного двигателя и/или выполнены управляемыми, в частности, посредством системы рулевого управления с поворотными кулаками, по меньшей мере один расположенный на управляемом средстве сцепления с грунтом датчик угла поворота для регистрации установленного угла рулевого поворота соответствующего средства сцепления с грунтом и по меньшей мере один тормоз поворота для избирательного торможения одного или нескольких, в частности приводных, средств сцепления с грунтом ходовой оси для содействия рулевому управлению, при этом в соответствии с изобретением предусмотрено устройство управления для управления и регулирования по меньшей мере одного тормоза поворота, причем определяют угол рулевого поворота и/или угол бокового увода по меньшей мере одного управляемого средства сцепления с грунтом, и управляют тормозом поворота и регулируют его в зависимости от угла рулевого поворота и/или угла бокового увода.
Благодаря автоматическому управлению и регулированию тормоза поворота в зависимости от угла рулевого поворота и/или от угла бокового увода снижается нагрузка на оператора рабочей машины, так как отсутствует ручной привод в действие. Кроме того, автоматическая активация и управление тормозом поворота позволяет избежать ошибочного управления оператором, что может повысить безопасность. Активация, управление и регулирование тормоза поворота может производиться по мере надобности, что обеспечивает не только эффективное использование тормоза поворота, но также более точное регулирование соответствующего тормозного усилия, так что избыточное торможение и излишние напряжения приводной трансмиссии могут быть предотвращены. За счет этого может быть улучшено содействие рулевому управлению системы рулевого управления с поворотными кулаками и улучшена управляемость в трудных грунтовых условиях или при малой нагрузке на переднюю ходовую ось.
Тормоз поворота предпочтительно активируют в зависимости от соотношения между теоретической окружной скоростью и действительной окружной скоростью по меньшей мере одного приводного средства сцепления с грунтом, в зависимости от предельной скорости движения и/или предельного угла рулевого поворота, и/или угла бокового увода. При этом под активацией следует понимать возможность регулирования и управления тормозом поворота посредством устройства управления. При деактивированном тормозе поворота невозможен его привод в действие, то есть невозможно торможение одного колеса для содействия рулевому управлению. Угол рулевого поворота, угол бокового увода и/или скорости могут быть заданы в качестве пороговых величин, при превышении или пересечении вниз которых осуществляется активация тормоза поворота. Возможно также использование данных положения, в частности спутниковой, навигационной системы в качестве пороговых величин, привязанных к положению. Это решение дает преимущество в том, что могут быть устранены, например, чрезмерная активация, а также управление и регулирование тормоза поворота, или его активация при дорожном движении.
Угловую скорость рабочей машины, в частности для определения угла бокового увода по меньшей мере одного управляемого средства сцепления с грунтом, предпочтительно определяют посредством гироскопа. Посредством гироскопа может быть определена угловая скорость рабочей машины, в частности вокруг мгновенного центра поворота. Благодаря этому угол бокового увода для управления и регулирования тормоза поворота может быть определен экономичным образом.
Радиус кривой движения по меньшей мере одной из ходовых осей особенно предпочтительно определяют с помощью, в частности спутниковой, навигационной системы. Это позволяет экономичным образом определять по меньшей мере один радиус кривой движения ходовой оси, требуемый для управления и регулирования тормоза поворота на основе угла бокового увода.
Краткое описание чертежей
Далее изобретение будет пояснено на нескольких примерах осуществления со ссылками на прилагаемые чертежи. На чертежах показаны:
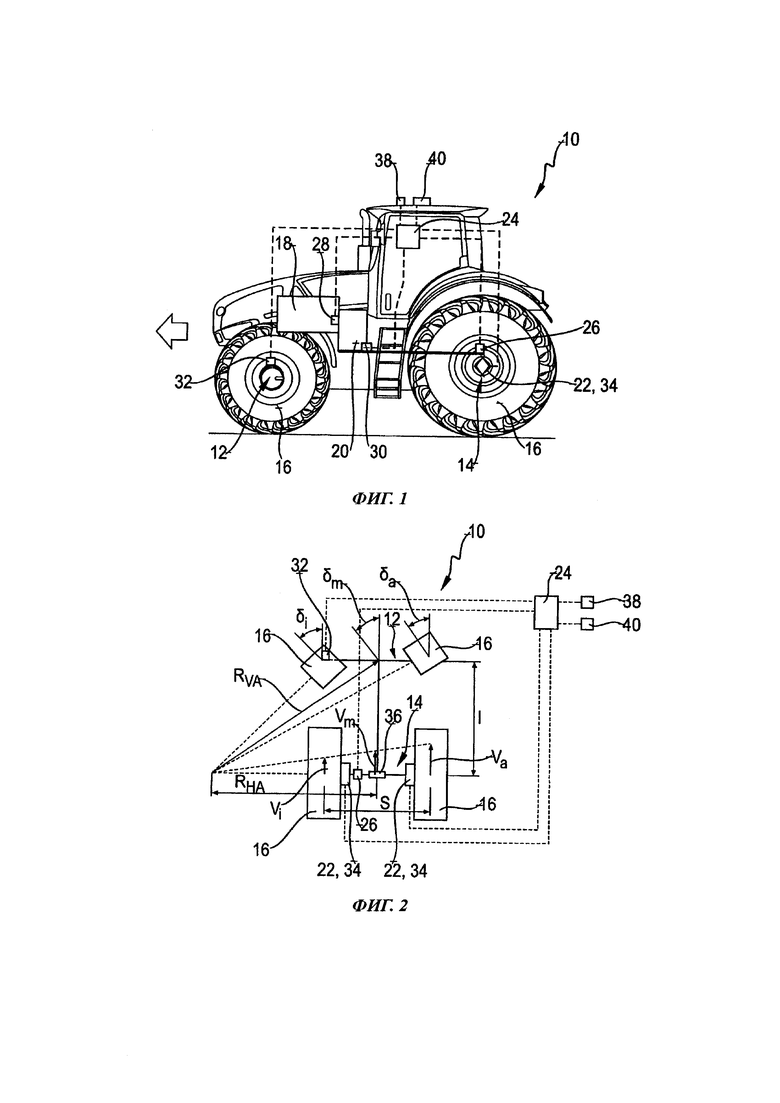
фиг. 1 - схематический вид сбоку сельскохозяйственной рабочей машины;
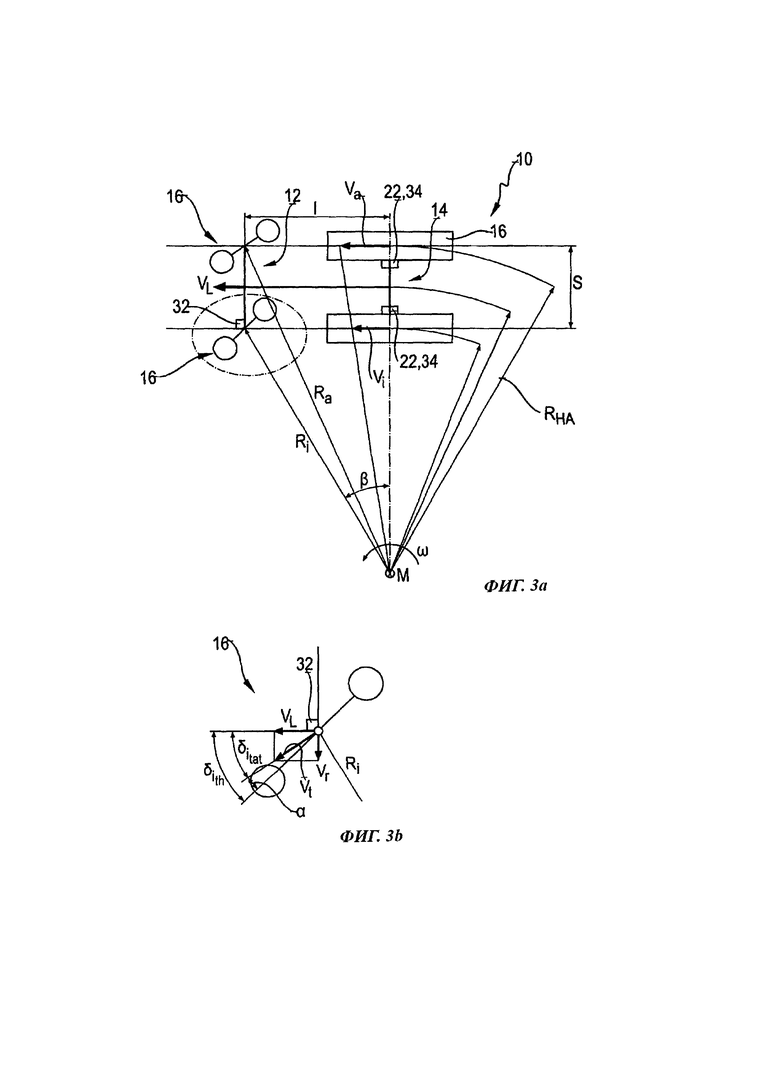
фиг. 2 - схематический вид системы ходовых осей сельскохозяйственной рабочей машины с управляемой ходовой осью и приводной ходовой осью;
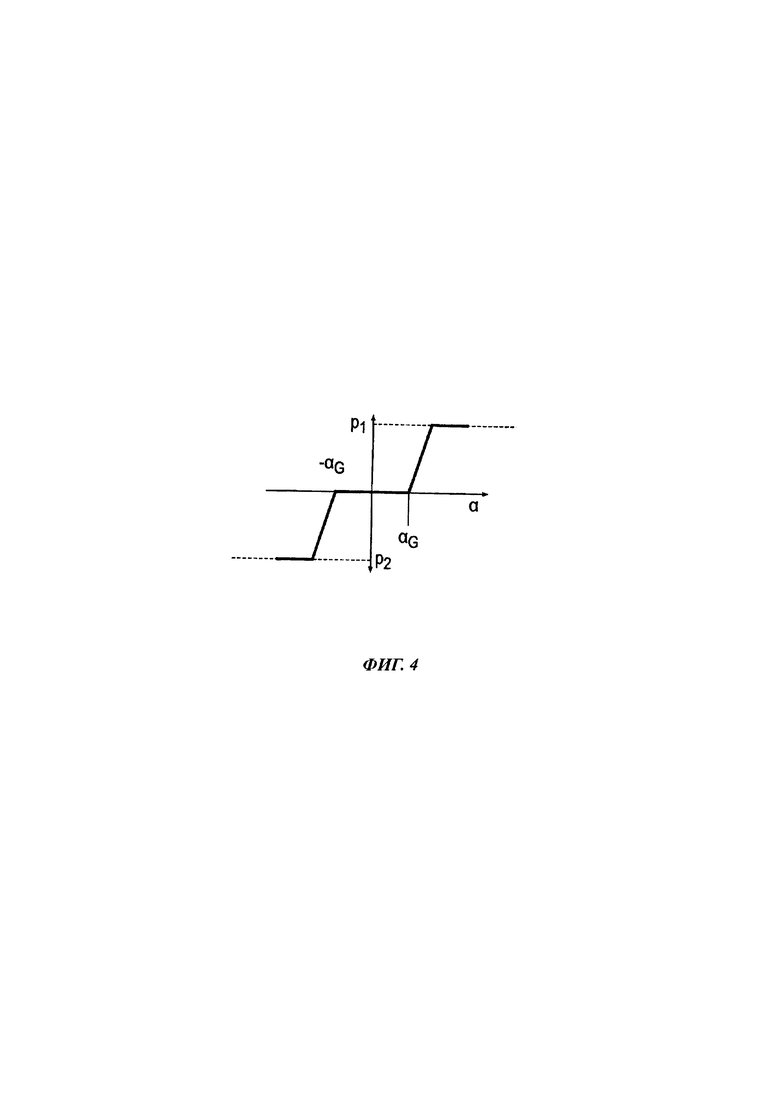
фиг. 3a - схематическое изображение системы ходовых осей рабочей машины для управления и регулирования тормоза поворота на основе угла бокового увода колеса;
фиг. 3b - схематический подробный вид управляемого средства сцепления с грунтом системы ходовых осей по фиг. 3a;
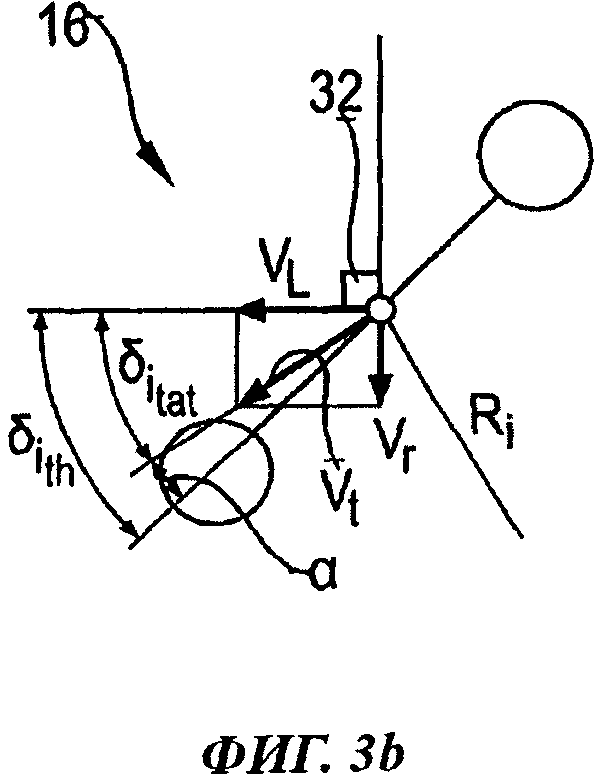
фиг. 4 - диаграмма отклика тормоза поворота в зависимости от угла бокового увода колеса.
Осуществление изобретения
На фиг. 1 на схематическом виде сбоку показана сельскохозяйственная рабочая машина 10 в виде трактора. В контексте изобретения сельскохозяйственная рабочая машина 10 может быть также самоходной уборочной машиной, такой как зерноуборочный комбайн или полевой измельчитель, или любой другой рабочей машиной, используемой для сельскохозяйственных работ. Показанная сельскохозяйственная рабочая машина 10 в виде трактора содержит первую ходовую ось 12 в виде управляемой передней ходовой оси и вторую ходовую ось 14 в виде жесткой задней ходовой оси. В самоходной уборочной машине, такой как зерноуборочный комбайн, первая ходовая ось может быть, например, управляемой задней ходовой осью, а вторая ось может быть жесткой передней ходовой осью. На ходовых осях 12, 14 расположены средства 16 сцепления с грунтом. При этом средства 16 сцепления с грунтом могут быть выполнены в виде колес или в виде гусеничных ходовых механизмов. Сельскохозяйственная рабочая машина 10 может быть оснащена исключительно колесами или гусеницами, или так называемым полугусеничным ходовым механизмом, в котором на одной ходовой оси расположены средства 16 сцепления с грунтом в виде колес, а на другой ходовой оси расположены средства 16 сцепления с грунтом в виде гусеничных ходовых механизмов. В рабочей машине 10 в виде трактора на полугусеничном ходу, например, на первой (передней) ходовой оси 12 могут быть расположены управляемые колеса, а на второй (задней) ходовой оси - гусеничные ходовые механизмы. Средства 16 сцепления с грунтом на первой ходовой оси 12 управляются посредством рулевого управления с поворотными кулаками.
Рабочая машина 10 содержит приводной двигатель 18, который через коробку 20 передач и трансмиссию 22 кинематически соединен со второй (задней) ходовой осью 14 для передачи на нее подаваемого приводным двигателем 18 приводного момента. На фиг. 1 показана рабочая машина 10 с задним колесным приводом, однако в соответствии с изобретением содействие рулевому управлению может использоваться также в рабочих машинах с приводом на все колеса, при этом ходовая ось может быть управляемой и/или приводной. Обычно на приводной ходовой оси 14 расположен дифференциальный передаточный механизм (не показан), чтобы распределять приводной момент на средства 16 сцепления с грунтом. На второй (задней) ходовой оси 14 расположен тормоз 22 поворота, который обеспечивает возможность одностороннего торможения средств 16 сцепления с грунтом второй ходовой оси 14. При этом для средств 16 сцепления с грунтом на второй ходовой оси 14 размещены тормозные устройства 34, которые приводятся совместно в качестве рабочих тормозов, например, для снижения скорости рабочей машины 10 при дорожном движении. В качестве тормозов 22 поворота эти тормозные устройства 34 могут приводиться индивидуально, в частности на одной стороне, что обеспечивает возможность одностороннего замедления, например для получения очень малого радиуса поворота. Обычно тормозные устройства 34 рабочего торможения и/или тормоза 22 поворота современной сельскохозяйственной рабочей машины 10 приводятся гидравлически, причем для тормозного сцепления увеличивают тормозное гидравлическое давление, что приводит к созданию тормозного усилия на соответствующем средстве 16 сцепления с грунтом.
На приводной второй ходовой оси 14 для одного или обоих расположенных на ходовой оси 14 средств 16 сцепления с грунтом расположен датчик 26 числа оборотов для регистрации числа оборотов соответствующего средства 16 сцепления с грунтом. Посредством датчика 28 приводного двигателя и датчика 30 коробки передач могут быть определены числа оборотов приводного двигателя 18 и коробки 20 передач. Кроме того, посредством датчика 30 коробки передач и данных числа оборотов приводного двигателя 18 может быть определено текущее передаточное отношение коробки 20 передач. На управляемой первой (передней) ходовой оси 12 на одном или обоих средствах 16 сцепления с грунтом расположен датчик 32 угла поворота, посредством которого может определяться угол δ рулевого поворота, установленный на соответствующем средстве 16 сцепления с грунтом. Угол δ рулевого поворота устанавливается в зависимости от движения рулевого управления оператора рабочей машины 10, например посредством руля, для изменения направления движения рабочей машины 10. При этом угол δ рулевого поворота является углом δ рулевого поворота, установленным на средстве 16 сцепления с грунтом, то есть углом, на который средство 16 сцепления с грунтом отклоняется наружу от нулевой установки для прямого движения рабочей машины 10.
В соответствии с изобретением тормоза 22 поворота сельскохозяйственной рабочей машины 10 приводятся в действие устройством 24 управления автоматически в зависимости от, в частности установленного, угла δth рулевого поворота и/или от угла а бокового увода колеса, чтобы оказать содействие движению рулевого управления рабочей машины 10, которое осуществляется посредством управляемой первой (передней) ходовой оси 12. Для управления и регулирования тормоза 22 поворота, в частности на основе угла бокового увода, сельскохозяйственная рабочая машина 10 снабжена гироскопом 38, который связан с устройством 24 управления для передачи сигналов. С устройством 24 управления также связана, в частности спутниковая, навигационная система 40 рабочей машины 10, так что сигналы положения навигационной системы 40 используются устройством 24 управления для управления и регулирования тормоза 22 поворота, в частности на основе угла бокового увода.
На фиг. 2 на схематическом виде сверху показана система ходовых осей сельскохозяйственной рабочей машины 10 с тормозом 22 поворота, а также показаны геометрические соотношения системы ходовых осей, такие как колея s и колесная база I рабочей машины 10. Первая ходовая ось 12 является управляемой передней ходовой осью с расположенными на ней средствами 16 сцепления с грунтом, например колесами или гусеничными ходовыми механизмами. Средства 16 сцепления с грунтом поворачивают, например посредством системы рулевого управления с поворотными кулаками (не показана), на установленный угол δ рулевого поворота, причем внутреннее относительно кривой поворота средство 16 сцепления с грунтом поворачивают на угол δi рулевого поворота, больший угла δa рулевого поворота средства 16 сцепления с грунтом, наружного относительно кривой поворота, так как радиус кривой внутреннего средства 16 сцепления с грунтом меньше радиуса кривой наружного средства 16 сцепления с грунтом. Для передней ходовой оси из углов δi, δa рулевого поворота внутреннего и наружного средств 16 сцепления с грунтом может быть вычислена средняя величина δm, из которой получают радиус RVA кривой, описываемой передней ходовой осью. Ввиду того, что вторая (задняя) ходовая ось 14 в своей средней точке двигается со скоростью vm по кривой с радиусом RHA, окружные скорости vi, va внутреннего и наружного относительно кривой поворота средств 16 сцепления с грунтом имеют различные значения. При этом окружные скорости vi, va средств 16 сцепления с грунтом зависят от установленных углов δi, δa рулевого поворота, причем для содействия рулевому повороту в соответствии с установленными углами δi, δa рулевого поворота окружную скорость vi внутреннего относительно кривой поворота средства 16 сцепления с грунтом устанавливают посредством тормоза 22 поворота.
При этом управление и регулирование тормоза 22 поворота основывается только на определении геометрических параметров системы рулевого управления и осуществляется в зависимости от установленного угла δ рулевого поворота по меньшей мере одного средства 16 сцепления с грунтом, который может быть зарегистрирован посредством датчика 32 угла поворота, например, на внутреннем относительно кривой поворота средстве 16 сцепления с грунтом. Угол δa рулевого поворота наружного относительно кривой поворота средства 16 сцепления с грунтом может определяться на основе кинематики системы рулевого управления первой ходовой оси 12, которая может быть записана в устройстве 24 управления. Для управления и регулирования тормоза 22 поворота для устройства 24 управления помимо теоретических окружных скоростей vi,th, va,th внутреннего и наружного средств 16 сцепления с грунтом требуются их действительные окружные скорости vi,tat, va,tat, например для компенсации слишком сильной пробуксовки и во избежание избыточного торможения внутреннего средства 16 сцепления с грунтом. Теоретические окружные скорости vi,th и va,th внутреннего и наружного средств 16 сцепления с грунтом могут быть определены из геометрических соотношений на задней ходовой оси 14. Действительные окружные скорости vi,tat, va,tat внутреннего и наружного относительно кривой поворота средств 16 сцепления с грунтом могут быть определены из их измеренных чисел оборотов и соответствующих радиусов проезда колес или гусеничных ходовых механизмов. При этом достаточно уже датчика 26 числа оборотов на средстве 16 сцепления с грунтом, поскольку число оборотов, измеренное на средстве 16 сцепления с грунтом, соответствует числу оборотов выходного вала дифференциала 36, приводящего это средство 16 сцепления с грунтом. Число оборотов другого выходного вала дифференциала 36, а следовательно, и другого средства 16 сцепления с грунтом, может быть определено из числа оборотов входного вала дифференциала 36 и его передаточного отношения. При этом число оборотов входного вала дифференциала 36 соответствует числу оборотов выходного вала коробки 20 передач, которое определяется датчиком 30 коробки передач. При отсутствии датчика 30 коробки передач выходное число оборотов коробки 20 передач может быть получено из числа оборотов приводного двигателя 18 и действующего передаточного отношения коробки передач.
Управление и регулирование тормоза 22 поворота может надежно осуществляться на основе регистрируемых датчиком 32 угла поворота установленных углов δi, δa рулевого поворота, регистрируемого датчиком 26 числа оборотов средства 16 сцепления с грунтом второй ходовой оси 14 и выходного числа оборотов коробки 20 передач. При этом устройство 24 управления на основе указанных значений датчиков и геометрических соотношений может определять как теоретическую, так и действительную окружную скорость vi,th, vi,tat внутреннего относительно кривой поворота средства 16 сцепления с грунтом и регулировать тормоз 22 поворота соответствующим образом. При этом, например, посредством контура регулирования может устраняться различие между теоретической и действительной окружной скоростью vi,th и vi,tat внутреннего относительно кривой поворота средства 16 сцепления с грунтом посредством соответствующего привода в действие тормоза 22 поворота, в частности внутреннего относительно кривой поворота тормозного устройства 34. Дополнительное преимущество состоит в том, что скорость vm средней точки задней ходовой оси 14 может быть получена из трансмиссии, в результате чего система невосприимчива к высоким значениям пробуксовки, которые часто встречаются на вязких грунтах.
На фиг. 3a показан другой пример осуществления тормоза 22 поворота в соответствии с изобретением, в котором управление и регулирование тормоза 22 поворота осуществляется устройством 24 управления в зависимости по меньшей мере от одного угла α бокового увода управляемого средства 16 сцепления с грунтом на первой (передней) ходовой оси 12. Угол α бокового увода средства 16 сцепления с грунтом является углом между установленным посредством системы рулевого управления теоретическим углом δth рулевого поворота и действительным углом δtat рулевого поворота, воздействующим на движение рабочей машины. При этом небольшой угол α бокового увода необходим для того, чтобы средство 16 сцепления с грунтом могло создавать боковые направляющие усилия для изменения направления движения.
При этом регулирование тормоза 22 поворота и, в частности, тормозного давления с каждой стороны тормоза 22 поворота производится на основе определяемого устройством 24 управления угла α бокового увода, который получают из разности между установленным углом δth рулевого поворота и действительным углом δtat рулевого поворота. Посредством управления тормозом 22 поворота скорость средства 16 сцепления с грунтом может быть изменена, при этом изменение скорости оказывает влияние на действительный угол δtat рулевого поворота. Так, например, при замедлении внутреннего относительно кривой поворота средства 16 сцепления с грунтом действительный угол δtat рулевого поворота увеличивается и приближается к установленному углу δth рулевого поворота, и при этом угол α бокового увода может быть уменьшен. В результате рабочая машина изменяет направление движения по радиусу, установленному на средстве 16 сцепления с грунтом. При этом регулирование тормоза 22 поворота может осуществляться от предварительно заданного предельного угла αG бокового увода, вследствие чего создание боковых направляющих усилий возможно при малом угле α бокового увода.
Регулирование тормоза 22 поворота в зависимости от угла α бокового увода по сравнению с использованием только установленного угла рулевого поворота имеет то преимущество, что большая часть разворачивающего момента рабочей машины 10 может реализовываться через управляемую первую ходовую ось 12, которая вследствие расположенной там системы рулевого управления с поворотными кулаками более эффективна, чем тормоз 22 поворота. Поэтому для регулирования тормоза 22 поворота устройством 24 управления установленный теоретический угол δth рулевого поворота средства 16 сцепления с грунтом сравнивается с действительным углом δtat рулевого поворота, чтобы из их разности определить угол α бокового увода. Рабочая машина 10, показанная схематически на виде сбоку на фиг. 3a, имеет на управляемой первой (передней) ходовой оси 12 средства 16 сцепления с грунтом в виде колес. На приводной второй (задней) ходовой оси 14 расположены средства 16 сцепления с грунтом, например, в виде гусеничных ходовых механизмов. Далее будет описано определение угла αi бокового увода для внутреннего относительно кривой поворота средства 16 сцепления с грунтом, а определение угла αa бокового увода может быть выполнено аналогичным образом.
Подлежащий определению угол αi бокового увода внутреннего относительно кривой поворота колеса 16 определяют из разности установленного угла δi,th, рулевого поворота и действительного угла δi,tat рулевого поворота. Установленный угол δi,th рулевого поворота внутреннего относительно кривой поворота колеса 16 на управляемой передней ходовой оси 12 может быть зарегистрирован непосредственно датчиком 32 угла поворота. Действительный угол δi,tat рулевого поворота определяют из известных геометрических условий рабочей машины 10, таких как колея s и колесная база I, которые могут быть записаны в процессоре 24, а также из окружных скоростей vi, va двух приводных средств 16 сцепления с грунтом второй ходовой оси 14, например внутреннего и наружного гусеничных ходовых механизмов. При этом разность двух окружных скоростей vi, va приводных средств 16 сцепления с грунтом, которая может быть определена по радиусу RHA кривой движения задней ходовой оси 14 и, в случае необходимости, колее s, соответствует действующей для системы рулевого управления скорости vL на передней ходовой оси 12. На основе этой скорости vL (фиг. 3b) совместно со скоростью vt в действительном направлении рулевого управления определяют действительный угол δi,tat рулевого поворота, причем скорость vt может определяться по угловой скорости ω рабочей машины 10 вокруг мгновенного центра M вращения и радиусу Ri кривой движения внутреннего колеса.
Угловая скорость ω может определяться, например, посредством гироскопа, например, инерциального измерительного устройства или гиростабилизированной платформы. Посредством имеющейся, в частности спутниковой, навигационной системы путем анализа данных положения может определяться, например, радиус RHA кривой движения задней ходовой оси.
Для дальнейшего улучшения активации, управления и регулирования тормоза поворота могут быть предварительно заданы пороговые величины. Так, например, может быть задана предельная скорость, ниже которой допускается активация тормоза поворота, тогда как при скорости рабочей машины выше предельной активация не допускается, например, при дорожном движении рабочей машины со скоростью выше предельной. Таким же образом для угла δ рулевого поворота и/или для угла α бокового увода колеса могут быть заданы предельные углы δG, αG, причем активация тормоза 22 поворота осуществляется только при величине углов выше предельных величин δG, αG.
На фиг. 4 показана диаграмма отношения угла α бокового увода к тормозному давлению P1,2, которое действует на тормоз 22 поворота, в частности на тормозное устройство 34. При величине угла α бокового увода ниже предельной величины αG тормоз 22 поворота не приводится в действие ни при кривой движения влево (левая сторона диаграммы), ни при кривой движения вправо (правая сторона диаграммы). За счет этого обеспечивается малый угол α бокового увода или малый угол δ рулевого поворота, так что меньшие движения рулевого управления осуществляются исключительно через систему рулевого управления, в частности систему рулевого управления с поворотными кулаками, передней ходовой оси 12, которая работает более эффективно, чем тормоза 22 поворота. Кроме того, за счет этого может быть повышена эффективность рабочей машины 10 при работе в качестве тягача, так как торможение приводных средств 16 сцепления с грунтом производится только при превышении предельных углов δG, αG. При превышении предельных углов δG, αG осуществляется регулирование тормоза 22 поворота в соответствии с определенной кривой вплоть до максимального тормозного давления для содействия рулевому управлению рабочей машины 10.
Перечень позиций
Предложена сельскохозяйственная рабочая машина, содержащая колеса (16), ходовые оси, приводной двигатель. Колеса (16) выполнены управляемыми посредством системы рулевого управления с поворотными кулаками. Машина также содержит датчик (32) угла поворота для регистрации установленного угла (


1. Сельскохозяйственная рабочая машина, содержащая по меньшей мере одну первую ходовую ось (12) и одну вторую ходовую ось (14), несколько расположенных на ходовых осях (12, 14) средств (16) сцепления с грунтом, причем по меньшей мере часть средств (16) сцепления с грунтом выполнены с возможностью приведения в действие посредством приводного двигателя (18) и/или выполнены управляемыми, в частности, посредством системы рулевого управления с поворотными кулаками, по меньшей мере один расположенный на управляемом средстве (16) сцепления с грунтом датчик (32) угла поворота для регистрации установленного угла (


2. Рабочая машина по п. 1, отличающаяся тем, что управление и регулирование тормоза (22) поворота обеспечено по меньшей мере в зависимости от установленного угла (
3. Рабочая машина по п. 1 или 2, отличающаяся тем, что угол (
4. Рабочая машина по п. 1 или 2, отличающаяся тем, что активация тормоза (22) поворота обеспечена в зависимости от соотношения между теоретической окружной скоростью (

5. Рабочая машина по п. 1 или 2, отличающаяся тем, что активация тормоза (22) поворота обеспечена в зависимости от предельной скорости (
6. Рабочая машина по п. 1 или 2, отличающаяся тем, что активация тормоза (22) поворота обеспечена в зависимости от предельного угла (

7. Рабочая машина по п. 1 или 2, отличающаяся тем, что рабочая машина (10) содержит гироскоп (38) для регистрации угловой скорости (

8. Рабочая машина по п. 1 или 2, отличающаяся тем, что предусмотрена, в частности, спутниковая навигационная система (40), по данным положения которой может быть зарегистрирован радиус (
9. Рабочая машина по п. 1 или 2, отличающаяся тем, что средство (16) сцепления с грунтом выполнено в виде колеса или гусеничного ходового механизма.
10. Способ содействия рулевому управлению сельскохозяйственной рабочей машины, содержащей по меньшей мере одну первую ходовую ось (12) и одну вторую ходовую ось (14), несколько расположенных на ходовых осях (12, 14) средств (16) сцепления с грунтом, причем по меньшей мере часть средств (16) сцепления с грунтом выполнены с возможностью приведения в действие посредством приводного двигателя (18) и/или выполнены управляемыми, в частности, посредством системы рулевого управления с поворотными кулаками, по меньшей мере один расположенный на управляемом средстве (16) сцепления с грунтом датчик (32) угла поворота для регистрации установленного угла (
отличающийся тем, что предусмотрено устройство (24) управления для управления и регулирования по меньшей мере одного тормоза (22) поворота, причем определяют угол (

11. Способ по п. 10, отличающийся тем, что тормоз (22) поворота активируют в зависимости от соотношения между теоретической окружной скоростью (

12. Способ по п. 10 или 11, отличающийся тем, что посредством гироскопа (38) определяют угловую скорость (
13. Способ по п. 10 или 11, отличающийся тем, что определяют радиус (
| US 6530442 B1, 11.03.2003 | |||
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Механизм управления поворотом колесногоТРАНСпОРТНОгО СРЕдСТВА C ОдНОВРЕМЕННыМпОдТОРМАжиВАНиЕМ ОдНОгО из ВЕдущиХКОлЕС | 1979 |
|
SU839814A2 |

