Изобретение относится к области транспортного машиностроения и может быть использовано при проектировании систем управления поворотом, а также при исследовании динамики управляемого движения транспортных гусеничных машин.
При проектировании систем управления поворотом гусеничных машин, при создании мобильных роботов на их базе, при оценке подвижности машин в различных условиях эксплуатации необходима модель зависимости поворачивающего момента от параметров криволинейного движения (кривизны траектории, угловой скорости и ускорения поворота машины). Из-за нестабильности физико-механических свойств грунта опорного основания, параметров конструкции машины (вариации коэффициентов сопротивления уводу опорных катков при изменении температуры шин, инерционных свойств машины - при изменении массы при расходе топлива и степени загруженности перевозимым оборудованием) аналитическое решение задачи или численное моделирование требует экспериментальной проверки. В связи с этим используются экспериментальные способы определения поворачивающего момента.
Известен способ определения зависимости поворачивающего момента, равного моменту сопротивления повороту гусеничной машины, заключающийся в установке на корпус машины комбинированного гироскопа на упругом подвесе, выходы гироскопа соединяются с блоком расчета и регистрации параметров движения. (Благонравов А.А., Держанский В.Б. Динамика управляемого движения гусеничной машины: Учебное пособие. - Курган: Изд-во КМИ, 1995. 162 с., стр. 54-59, рис. 2.6, аналог). Комбинированный гироскоп позволяет в процессе движения гусеничной машины измерять угловую скорость поворота машины  , а также линейные - тангенциальное at и боковое аn, ускорения, определяющие значение коэффициента сопротивления повороту μ.
, а также линейные - тангенциальное at и боковое аn, ускорения, определяющие значение коэффициента сопротивления повороту μ.
При равномерном распределении вертикальной нагрузки на грунт, создаваемой движителем, равномерном повороте с постоянной угловой скоростью, когда гусеничная машина поворачивается относительно геометрического центра (относительно точки пересечения осей симметрии машины), момент сопротивления повороту равен:
 ,
, 
где m - масса машины, g - гравитационное ускорение, L - длинна опорной поверхности, - угловая скорость поворота, μ - коэффициент сопротивления повороту, an, at - соответственно нормальное и тангенциальное ускорение.
Недостаток такого способа определения поворачивающего момента поворота состоит в том, что сигналы ускорений, измеряемых комбинированным гироскопом, сильно зашумлены. В связи с этим точность получаемой зависимости ограничена.
Наиболее близким по технической сути и достигаемому результату является способ определения МC(k), предложенный А.О. Никитиным (Сергеев Л.В. Теория танка: - М.: Изд-во АКАДЕМИЯ БРОНЕТАНКОВЫХ ВОЙСК, 1973. 493 с., стр. 202-206, рис. 2.11, прототип). Сущность способа заключается в том, что на валы, соединяющие через бортовые редукторы трансмиссию с ведущими колесами, устанавливаются устройства измерения крутящих моментов, например тензомост с блоком питания и усилителем, выходы устройства измерения крутящих моментов через ВКУ (вращательное контактное устройство, например ртутный или струнный токосъемник) соединяются с блоком расчета и регистрации параметров. Момент сопротивления определяется по формуле:
где В - ширина колеи машины, Uбр - передаточное число бортового редуктора, rвк - радиус ведущего колеса, М1, М2 - измеряемое значение крутящих моментов.
На соединительные валы, указанные выше, устанавливаются также датчики частоты их вращения ω1 и ω2. Выходы этих датчиков электрически соединяются с блоком расчета и регистрации. Радиус поворота машины R и кривизна траектории k определяются по формулам:
Вследствие юза и буксования гусениц действительная кривизна траектории движения гусеничной машины отличается от расчетной, полученной по выше приведенной формуле, в 1,5…2,1 раза.
Таким образом, недостатки этого способа определения значения поворачивающего момента, требуемого для поворота машины с заданной кривизной траектории, угловой скоростью и ускорением, заключаются в следующем.
1. При экспериментальном определении принимается, что поворачивающий момент равен моменту сопротивления повороту формируемого взаимодействии гусениц с грунтом от кривизны траектории. Это выполняется лишь при равномерном повороте, когда угловая скорость постоянна, а угловое ускорение равно нулю. В общем случае движения гусеничной машины на дорогах с интенсивным изменением кривизны траектории - на тестовых трассах типа змейка, переставка и др. поворот происходит с переменной угловой скоростью. В этом случае значение поворачивающего момента гораздо больше момента сопротивления, формируемого взаимодействием гусениц с грунтом. При этом значение поворачивающего момента должно быть достаточным для преодоления момента сопротивления повороту  и дополнительных составляющих: - инерционной
и дополнительных составляющих: - инерционной  , а также составляющей момента, формируемой силами бокового движения Мву=ΘCyΣli, (Θ - угол бокового увода). При движении по твердому грунту эта составляющая ограничена, но может сопровождаться колебаниями. При движении машины по деформируемому грунту значение Мву существенно возрастает, так как определяет количество срезанного грунта и его перемещение в боковом направлении, т.е. формирует колею движения машины.
, а также составляющей момента, формируемой силами бокового движения Мву=ΘCyΣli, (Θ - угол бокового увода). При движении по твердому грунту эта составляющая ограничена, но может сопровождаться колебаниями. При движении машины по деформируемому грунту значение Мву существенно возрастает, так как определяет количество срезанного грунта и его перемещение в боковом направлении, т.е. формирует колею движения машины.
Требуемое значение поворачивающего момента определяется по дифференциальному уравнению

В выше приведенных уравнениях приняты следующие обозначения: сумма продольных координат осей опорных катков Σli относительно центра масс и сумма Zl12 их квадратов, момент инерции машины вокруг вертикальной оси Iz, Су - коэффициент сопротивления боковому уводу опорных катков.
Момент сопротивления повороту Мс при движении машины с большой скоростью выполняет функцию демпфирования и по значению может быть меньше других составляющих, входящих в дифференциальное уравнение. Приведенное выше уравнение поясняет недостаточную точность определения требуемого значения поворачивающего момента по величине момента сопротивления повороту, формируемого сопротивлением грунта.
Другой причиной ограничения точности известного метода определения поворачивающего момента является то, что поворачивающий момент определяется по величине крутящих моментов на валах, соединяющих через бортовые редукторы трансмиссию с ведущими колесами. В процессе движения машины зубчатые венцы ведущих колес динамически сложно взаимодействуют с элементами гусениц, что сопровождается возбуждением регулярных и случайных колебаний и существенных нагрузок. Поэтому сигналы крутящих моментов сильно зашумлены. Передача сигналов с вращающихся валов осуществляется через ВКУ - токосъемник, что дополнительно искажает сигналы.
Проведенный анализ изменения параметров движения машины, входящих в математическую модель динамического процесса управления движением гусеничной машины, показывает, что параметром, характеризующим требуемый поворачивающий момент, является функция давление рабочей жидкости в силовых магистралях гидрообъемного привода от угла поворота штурвала Р(αшт). В диапазоне давлений от 0 до 45 МПа оно может быть достаточно точно измерено датчиком давления с электрическим выходом. Таким образом, для машин, оснащенных гидрообъемным приводом механизма поворота, параметром, определяющим величину поворачивающего момента, является приведенная функция. В современных конструкциях машин цифровые датчики давления и угла поворота штурвала передают информацию по CAN-шине в бортовую информационно-измерительную и управляющую систему. Таким образом, предлагаемый параметр является достаточно информативным, может быть легко измерен, а его значение введено в информационно-измерительный комплекс для определения значения поворачивающего момента.
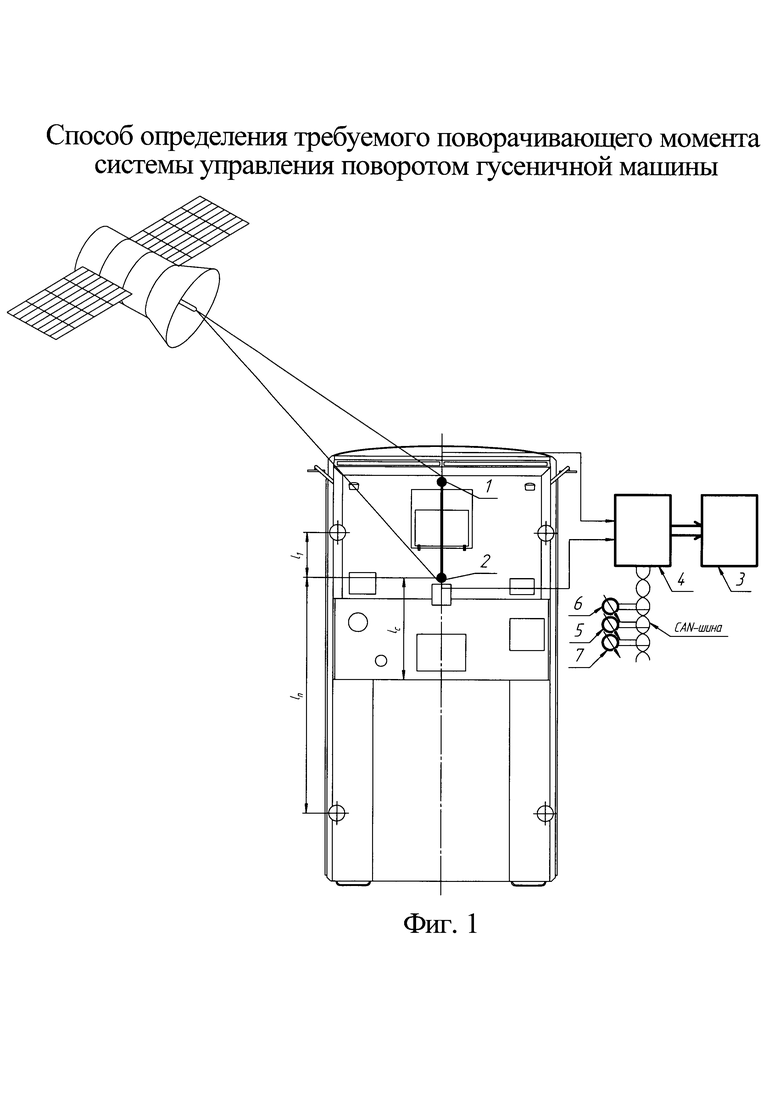
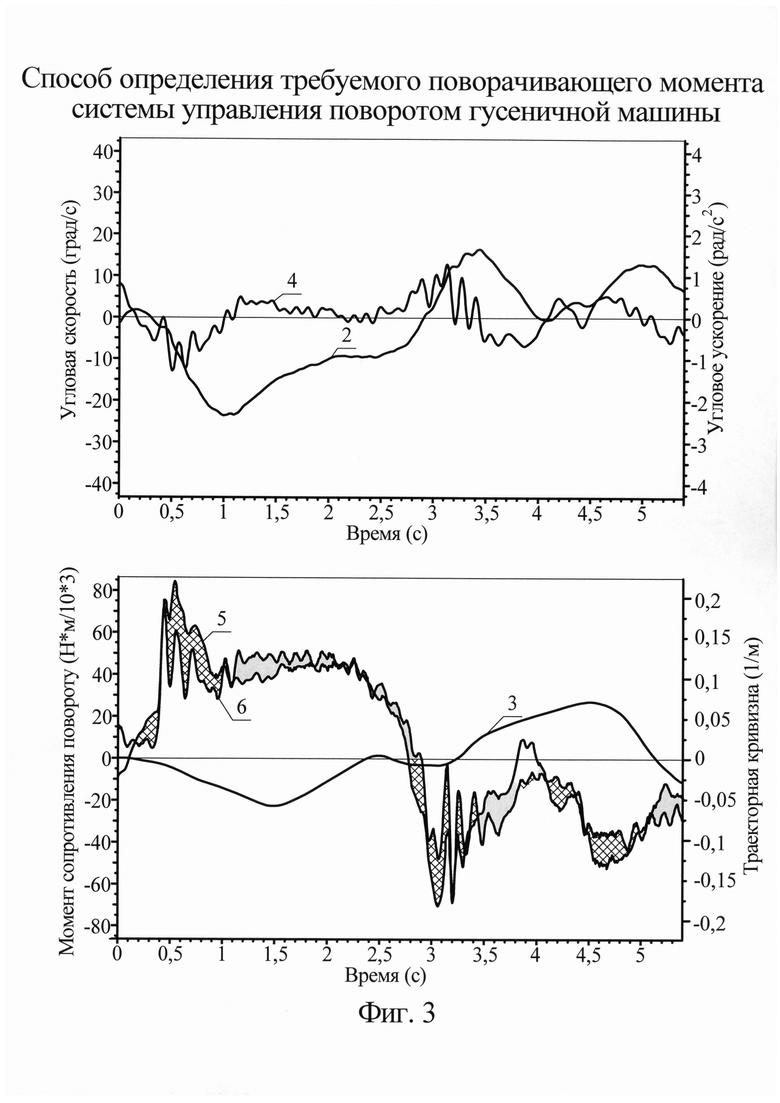
На фиг. 1 показана схема информационно-измерительного комплекса, который позволяет реализовать предлагаемый способ определения требуемого поворачивающего момента системы управления поворотом гусеничной машины, на фиг. 2 – блок-схема алгоритма, определяющего последовательность действий определения поворачивающего момента, а на фиг. 3 - примеры графической интерпретации результатов измерений.
Для реализации предлагаемого способа на гусеничную машину устанавливается информационно-измерительный комплекс Racelogic, программно-аппаратное обеспечение которого позволяет автоматически производить статистическую обработку, регистрацию и хранение информации, реализующий GPS/GLONASS технологию глобального позиционирования. Комплекс позволяет измерять, рассчитывать и регистрировать силовые параметры - давление рабочей жидкости в силовых магистралях гидропривода системы управления поворотом гусеничной машины, и кинематические: V - линейная скорость движения машины, ϕ,  ,
,  - соответственно угол поворота, угловая скорость поворота и угловое ускорение, Θki, Θc - соответственно углы бокового увода крайних опорных катков, число которых i, i=1…4, а также угол увода центра масс машины. Информационно-измерительный комплекс (фиг. 1) включает в себя две спутниковые антенны 1 и 2, установленные на крыше корпуса гусеничной машины вдоль ее продольной оси. Спутниковые антенны 1 и 2 электрически соединены с блоком регистрации 3 через блок 4 расчета параметров. Датчики давления 6 и 7 рабочей жидкости в силовых магистралях гидропривода системы управления поворотом и угла поворота штурвала через CAN-шину соединены с блоком 4.
- соответственно угол поворота, угловая скорость поворота и угловое ускорение, Θki, Θc - соответственно углы бокового увода крайних опорных катков, число которых i, i=1…4, а также угол увода центра масс машины. Информационно-измерительный комплекс (фиг. 1) включает в себя две спутниковые антенны 1 и 2, установленные на крыше корпуса гусеничной машины вдоль ее продольной оси. Спутниковые антенны 1 и 2 электрически соединены с блоком регистрации 3 через блок 4 расчета параметров. Датчики давления 6 и 7 рабочей жидкости в силовых магистралях гидропривода системы управления поворотом и угла поворота штурвала через CAN-шину соединены с блоком 4.
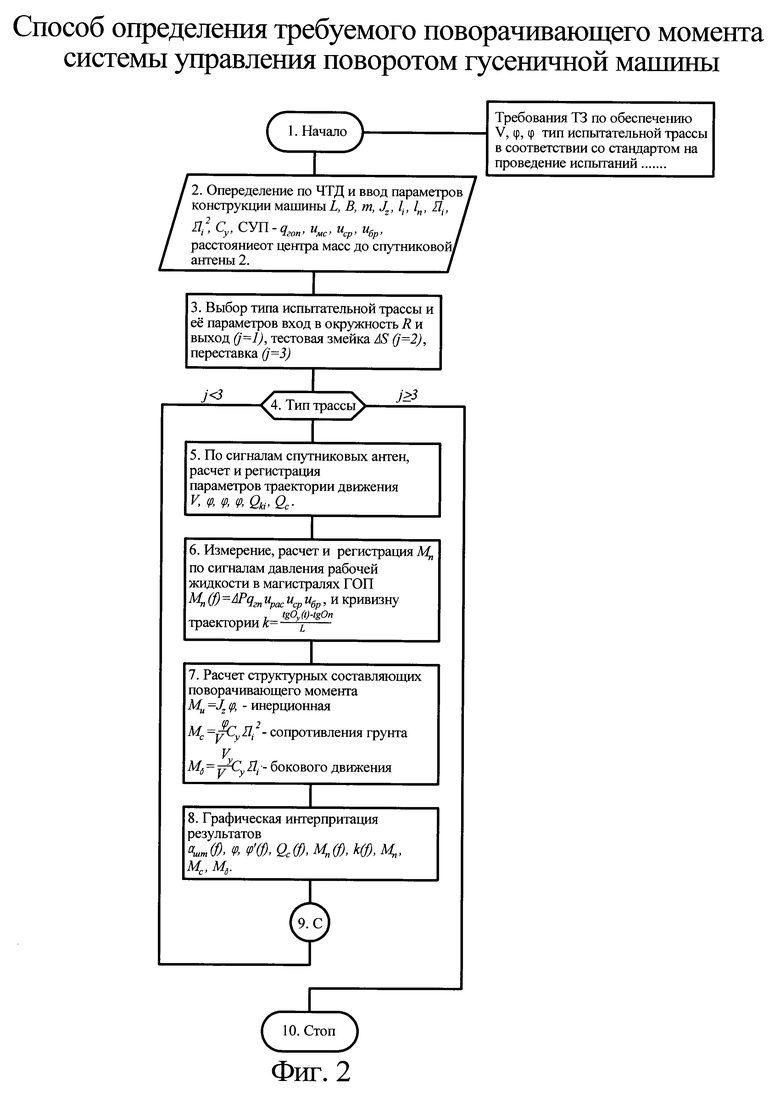
Предлагаемый способ экспериментального определения требуемого поворачивающего момента осуществляется по алгоритму, блок-схема которого приведена на фиг. 2.
1. Определение поворачивающего момента производится для нескольких типов испытательной трассы - окружность определенного радиуса, тестовая змейка с определенной длиной полуволны направляющей синусоиды, переставка при параметрах дороги ширина полосы Н и расстояние от контрольной точки до начала переставки до ее выполнения d. Выбор осуществляется из условия обеспечения движения с требуемыми техническим заданием кинематическими параметрами (V, ϕ, ) или в соответствии со стандартом на испытание машины (блок 1).
2. По чертежно-технической документации (ЧТД) определяются и вводятся в программу расчета поворачивающего момента следующие параметры конструкции машины (блок 2): масса m, момент инерции вокруг вертикальной оси Iz, передаточные числа от гидромотора до солнечной шестерни UMC, согласующего редуктора (от солнечной шестерни до водила UCP), и бортового редуктора Uбр, постоянная гидропривода системы управления поворотом qГОП, длина опорной поверхности машины L и ширина колеи В. Кроме того, вводится сумма продольных координат осей опорных катков Σli относительно центра масс и сумма Σli2 их квадратов, координата расположения спутниковых антенн относительно центра масс, а также расстояние от спутниковой антенны 2 до осей последних lk и первых l1 опорных катков.
3. Выбор типа испытательной трассы и ее параметров
1. Вход в окружность радиуса R и выход из нее (j=1).
2. Тестовая змейка с длиной полуволны ΔS (j=2).
3. Переставка при ширине полосы дороги Н и расстояние от контрольной точки начала переставки до ее выполнения d (j=3).
Испытания «переставка d=16 м», «переставка d=35 м» предназначены для определения максимальной скорости маневра при смене полосы движения на ограниченном участке пути.
4. В дальнейшем организуется циклический расчет (блок 4) для каждого типа трассы.
5. На основе сигналов спутниковых антенн 1 и 2 в соответствии с программно-аппаратным обеспечением информационно измерительный комплекс в блоке 4 (фиг. 1) определяется, а в блоке 3 регистрируются в процессе движения гусеничной машины следующие параметры V, ϕ, ,  , Θki, Θc.
, Θki, Θc.
6. По сигналам датчиков угла поворота штурвала 5, давления 6 и 7 (фиг. 1) по CAN-шине передается функция давления рабочей жидкости в силовых магистралях гидропривода, рассчитывается и регистрируются значение требуемого поворачивающего момента Mп(t)=P(αшт)qГОП⋅UМС⋅UCP⋅Uбр. Кривизна траектории k определяется в блоке 4 (фиг. 1) по сигналам спутниковых антенн 1 и 2 по значениям углов увода крайних опорных катков
7. По сигналам спутниковых антенн 1 и 2 в блоке 4 определяются структурные составляющие поворачивающего момента:
- инерционная 
- сопротивление повороту, формируемое взаимодействием движителя с грунтом опорным и основанием Мс=kСyΣli2,
- сопротивление повороту, формируемое боковым движением МΘ=ΘCyΣli.
8. Результаты определения кинематических и силовых параметров регистрируются в блоке 3 (фиг. 1) и выдаются в виде табличной и графической информации (фиг. 3) как функции времени αшт(t), ,  , Θc(t), Mп(t), k(t), Ми(t) и др.
, Θc(t), Mп(t), k(t), Ми(t) и др.
9. После выполнения интерпретации результатов определения (блок 9) расчет повторяется для всех видов трасс. По выполнению данного алгоритма расчета процесс заканчивается (блок 10).
Из графиков фиг. 3 следует, что величина динамического момента при входе машины в поворот составляет до 45% от суммарного поворачивающего момента и по фазе опережает его. При выходе машины из поворота величина динамической составляющей момента составляет до 52%. Реакция машины на управляющее воздействие (перемещение штурвала) по угловой скорости поворота запаздывает на 1,5…2,1 с. Фактическая угловая скорость поворота машины, как и кривизна траектории в 1,5…2,1 раза меньше расчетных значений, что вызвано буксованием движителя.
Эффективность предлагаемого способа определения поворачивающего момента, его зависимости от кинематических параметров траектории движения гусеничной машины в повороте, в том числе при переходных процессах, позволяет повысить точность измерения в 1,5….2,1 раза. Это способствует обоснованному выбору параметров конструкции системы управления поворотом при проектировании гусеничных машин и при создании мобильных роботов на их базе, более точной оценки подвижности машин на ранних этапах их создания. Монтаж информационно-измерительного комплекса на испытываемую машину гораздо проще и менее трудоемок по сравнению с аналогом и прототипом. Кроме того, автоматизация процесса получения информации, ее обработка и хранение снижает трудоемкость проведения испытаний и исключает субъективный фактор.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2015 |
|
RU2645487C2 |
| МЕХАТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПОВОРОТОМ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2013 |
|
RU2529929C1 |
| Система дистанционного телеметрического измерения коэффициента сопротивления уводу шин опорных катков гусеничных машин | 2019 |
|
RU2713688C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЫСТРОХОДНОЙ ТРАНСПОРТНОЙ МАШИНЫ | 2013 |
|
RU2534128C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ДВИЖЕНИЯ БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2011 |
|
RU2480361C1 |
| Способ определения временных и частотных параметров микропрофиля опорного основания в режиме реального времени | 2024 |
|
RU2833836C1 |
| БЕССТУПЕНЧАТЫЙ МЕХАНИЗМ ПОВОРОТА БЫСТРОХОДНОЙ ГУСЕНИЧНОЙ МАШИНЫ | 2003 |
|
RU2233760C1 |
| РАЗВЕДЫВАТЕЛЬНАЯ ХИМИЧЕСКАЯ МАШИНА | 2007 |
|
RU2369826C2 |
| Гусеничная машина | 1985 |
|
SU1306796A1 |
| ТРАНСМИССИЯ ГУСЕНИЧНОЙ МАШИНЫ С БОРТОВЫМИ КОРОБКАМИ ПЕРЕДАЧ | 2009 |
|
RU2412847C1 |
Изобретение относится к области транспортного машиностроения и может быть использовано при проектировании систем управления поворотом, а также при исследовании динамики управляемого движения транспортных гусеничных машин. Способ определения поворачивающего момента, создаваемого системой управления поворотом гусеничной машины, и его зависимости от кинематических параметров траектории движения заключается в следующем. На машину устанавливается информационно-измерительный комплекс для измерения силовых и кинематических параметров, характеризующих криволинейное движение гусеничной машины в повороте. Достигается повышение точности определения требуемых значений. 3 ил.
Способ определения поворачивающего момента, создаваемого системой управления поворотом гусеничной машины, и его зависимости от кинематических параметров траектории движения, заключающийся в установке на машину информационно-измерительного комплекса для измерения силовых и кинематических параметров, характеризующих криволинейное движение гусеничной машины в повороте, отличающийся тем, что применяется высокоточный информационно-измерительный комплекс Racelogic, программно-аппаратное обеспечение которого позволяет автоматически производить статистическую обработку, регистрацию и хранение информации, реализующий GPS/GLONASS технологию глобального позиционирования, комплекс включает спутниковые антенны, блоки расчета и регистрации параметров, с блоком расчета комплекса соединены спутниковые антенны, устанавливаемые на крыше вдоль продольной оси машины, а также через CAN-шину цифровые датчики давления рабочей жидкости в силовых магистралях гидрообъемного привода системы управления поворотом и угла поворота штурвала, в программу блока расчета вводятся параметры конструкции машины и системы управления поворотом, по сигналам датчиков на основе использования программно-аппаратного обеспечения комплекса в блоке расчета определяются параметры: давление рабочей жидкости в силовых магистралях гидрообъемного привода, кинематические - скорость поступательного движения, курсовой угол, угловые скорости и ускорения, углы увода крайних опорных катков и центра масс, величина поворачивающего момента определяется произведением давления рабочей жидкости, гидравлической постоянной гидрообъемного привода и передаточного числа от гидромотора до ведущих колес машины, а кривизну траектории определяют как частное от деления разности тангенсов углов увода последних и передних опорных катков на длину опорной поверхности машины, составляющая поворачивающего момента - момент сопротивления повороту, формируемый взаимодействием гусениц с опорным основанием, определяется произведением кривизны траектории движения, коэффициента сопротивления увода и суммой квадратов продольных координат осей опорных катков, инерционная составляющая определяется произведением инерционного момента машины вокруг вертикальной оси на угловое ускорение, а составляющая, формируемая боковым движением - значением бокового угла, коэффициента сопротивления уводу и суммы продольных координат, результаты измерения и расчета вводятся в блок регистрации.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СОЧЛЕНЁННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2601077C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПО КРЕНУ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ И СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2003 |
|
RU2256882C2 |
| US 4399884 A, 23.08.1983 | |||
| СПОСОБ ПОВОРОТА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2562937C1 |
| Прибор для определения холестерина в крови | 1926 |
|
SU14902A1 |

