Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу помощи при парковке и к устройству помощи при парковке.
Уровень техники
[0002] Известно устройство помощи при парковке, оснащенное в транспортном средстве (см., например, патентный документ 1). Это устройство работает с возможностью распознавать линию дорожной разметки на поверхности дороги в качестве парковочной рамки с использованием вывода радарного устройства, оснащенного в транспортном средстве, и задавать целевую позицию для парковки в области, секционированной посредством распознанной линии дорожной разметки. Устройство помощи при парковке, описанное в патентном документе 1, дополнительно работает с возможностью извлекать облако точек отражения, определенных в качестве идентичного объекта с использованием вывода радарного устройства. Когда два облака точек отражения извлекаются, и место, имеющее предварительно определенную ширину или более, существует между двумя облаками точек отражения, устройство помощи при парковке работает с возможностью задавать целевую позицию для парковки в упомянутом месте.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2013-220802A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Устройство помощи при парковке, описанное в патентном документе 1, задает одну или более парковочных рамок на основе ширины парковочных рамок, которая предварительно задается, но фактические парковочные рамки имеют множество ширин. Следовательно, задание парковочных рамок может затрагиваться посредством ошибок между заданным значением ширины парковочных рамок и фактическими ширинами парковочных рамок.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ помощи при парковке и устройство помощи при парковке, с помощью которых могут надлежащим образом задаваться парковочные рамки.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему посредством получения информации распознавания относительно трех или более припаркованных транспортных средств, присутствующих в группе парковочных рамок, содержащей три или более парковочных рамок, размещенных рядом, выбора характерных точек, заданных в идентичных позициях трех или более припаркованных транспортных средств, из информации распознавания, вычисления расстояния между характерными точками, которое представляет собой расстояние между характерными точками смежными друг другу, вычисления ширины парковочных рамок на основе множества расстояний между характерными точками, задания допускаемого значения в качестве ширины парковочных рамок и вычисления ошибок между расстояниями между характерными точками и значением целого, кратного допускаемому значению, и вычисления допускаемого значения, которое обеспечивает минимальную сумму ошибок, в качестве ширины парковочных рамок.
Преимущества изобретения
[0007] Согласно настоящему изобретению, ширина парковочных рамок вычисляется на основе расстояния между характерными точками распознанных припаркованных транспортных средств, и в силу этого могут уменьшаться ошибки между шириной парковочных рамок, которая должна задаваться, и фактическими ширинами парковочных рамок. Таким образом, получается такое преимущество, что парковочные рамки могут надлежащим образом задаваться.
Краткое описание чертежей
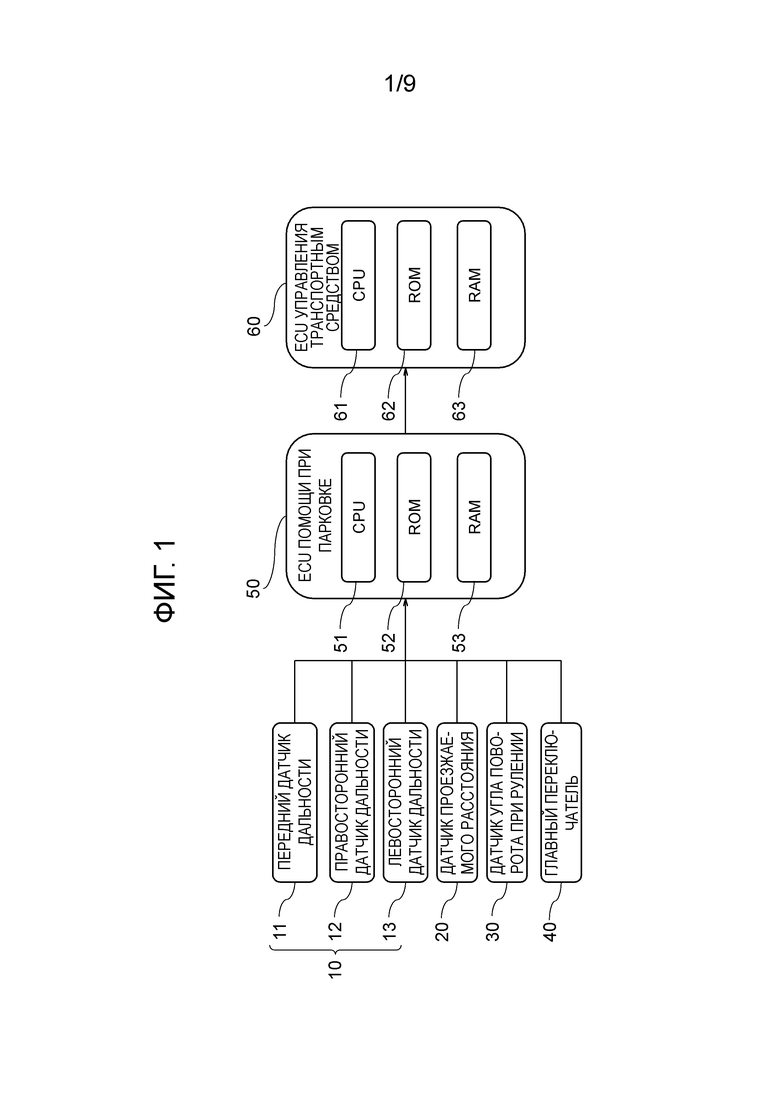
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
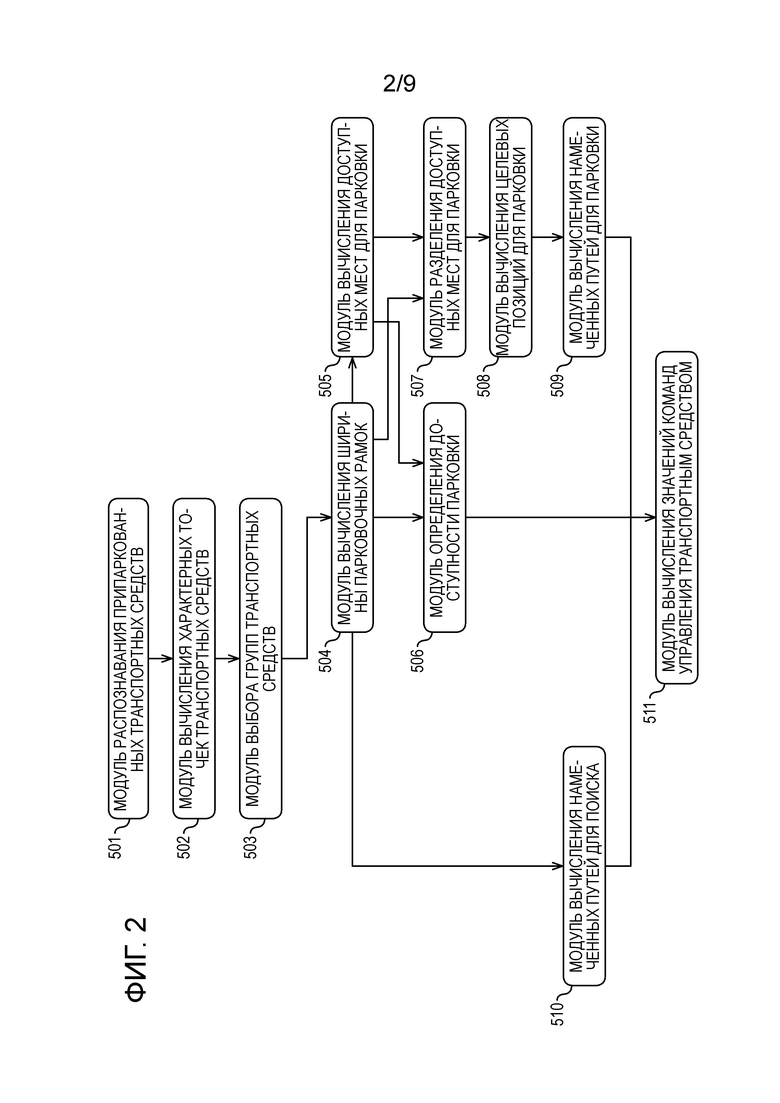
Фиг. 2 является блок-схемой для описания функций ECU помощи при парковке.
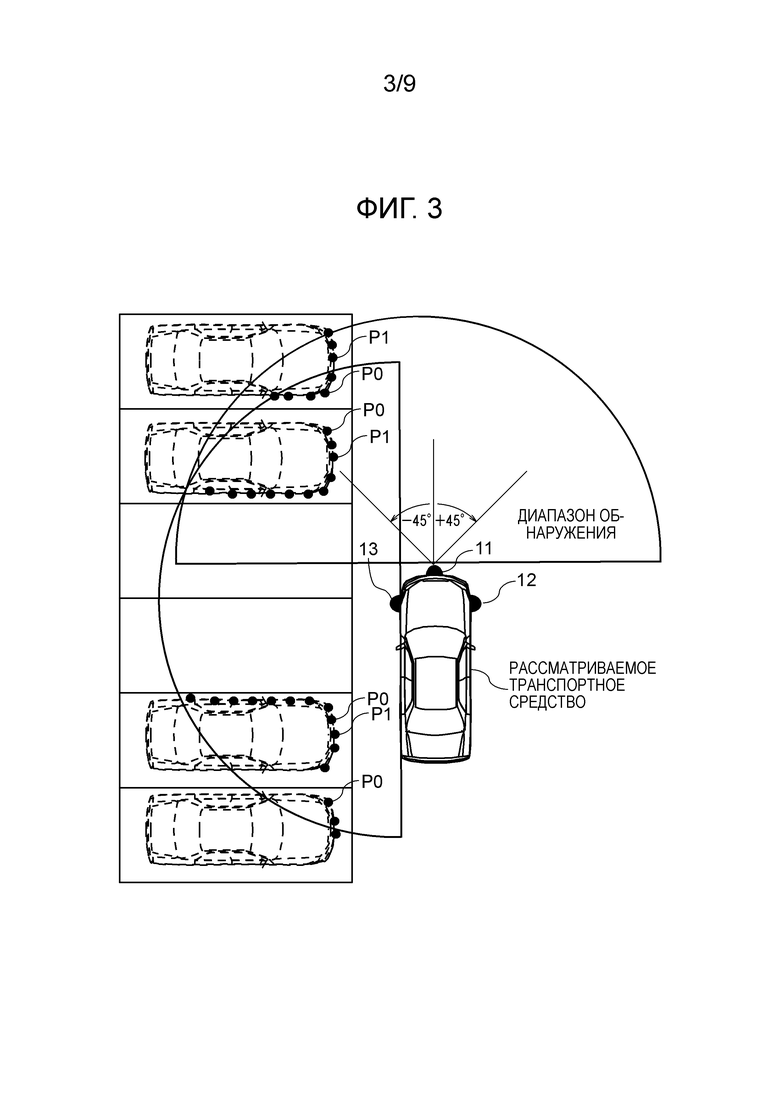
Фиг. 3 является видом сверху, иллюстрирующим состояние, в котором процесс распознавания для припаркованных транспортных средств выполняется на автомобильной парковке для схемы парковки под прямым углом (также называемой схемой холодной параллельной парковки).
Фиг. 4 является схемой для описания взаимосвязи между шириной парковочных рамок и единичным расстоянием между характерными точками.
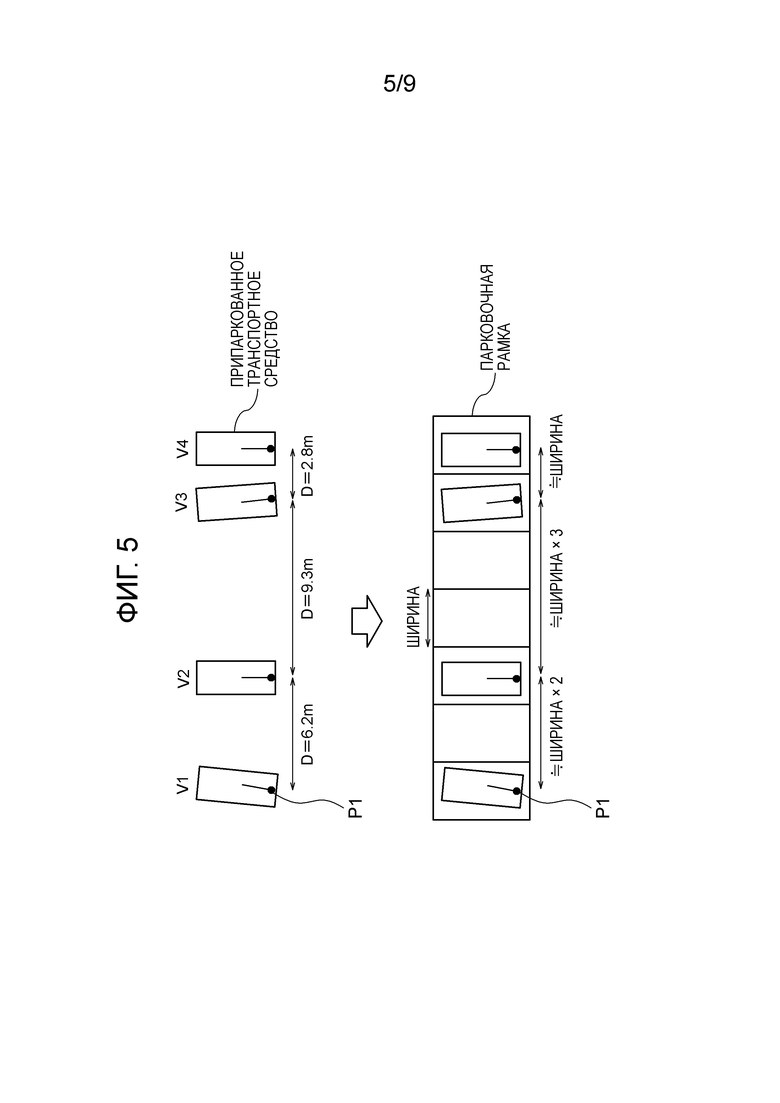
Фиг. 5 является схемой для описания взаимосвязи между шириной парковочных рамок и расстоянием между характерными точками, когда одна или более незанятых парковочных рамок присутствуют между транспортными средствами, припаркованными рядом.
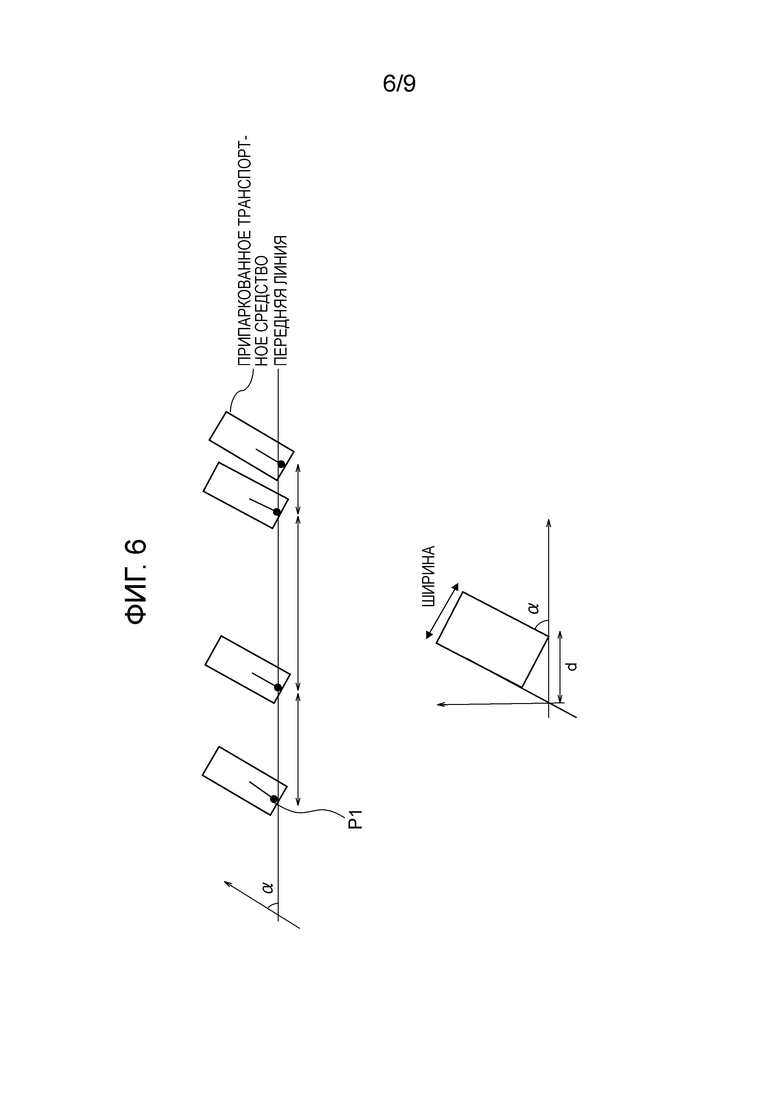
Фиг. 6 является схемой, иллюстрирующей взаимосвязь между шириной парковочных рамок и наклонным углом парковочных рамок относительно передней линии в случае схемы парковки под углом.
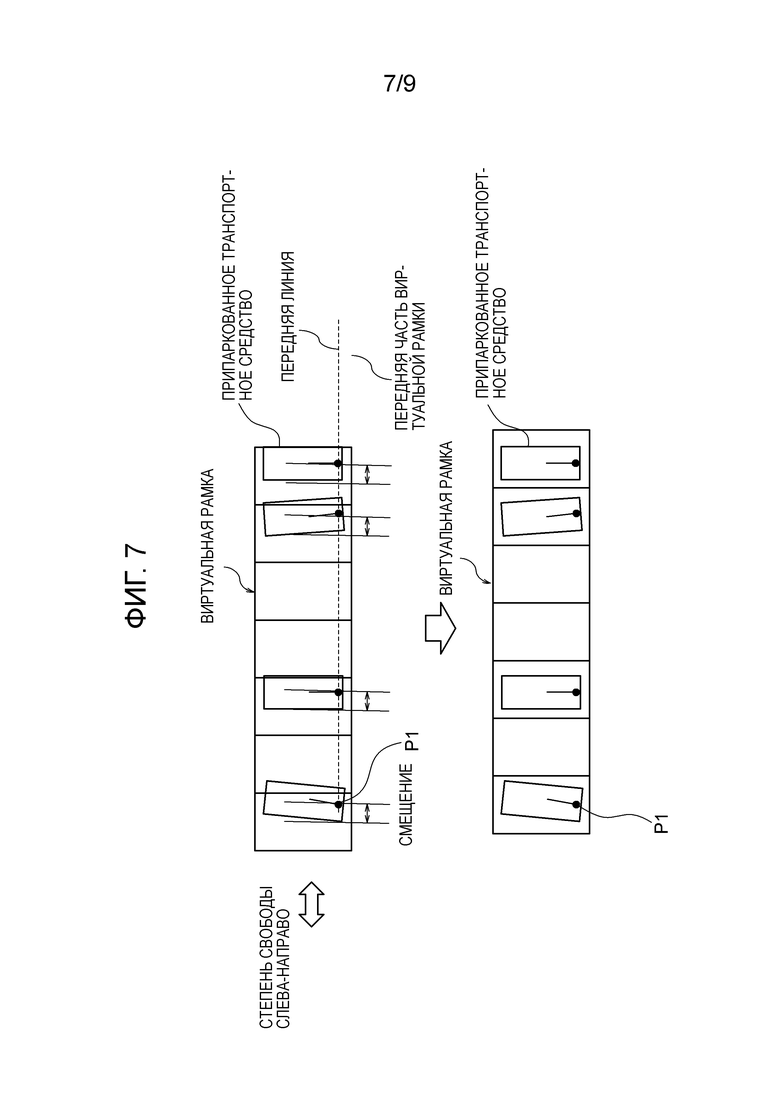
Фиг. 7 является схемой для описания примера способа разделения доступного места для парковки.
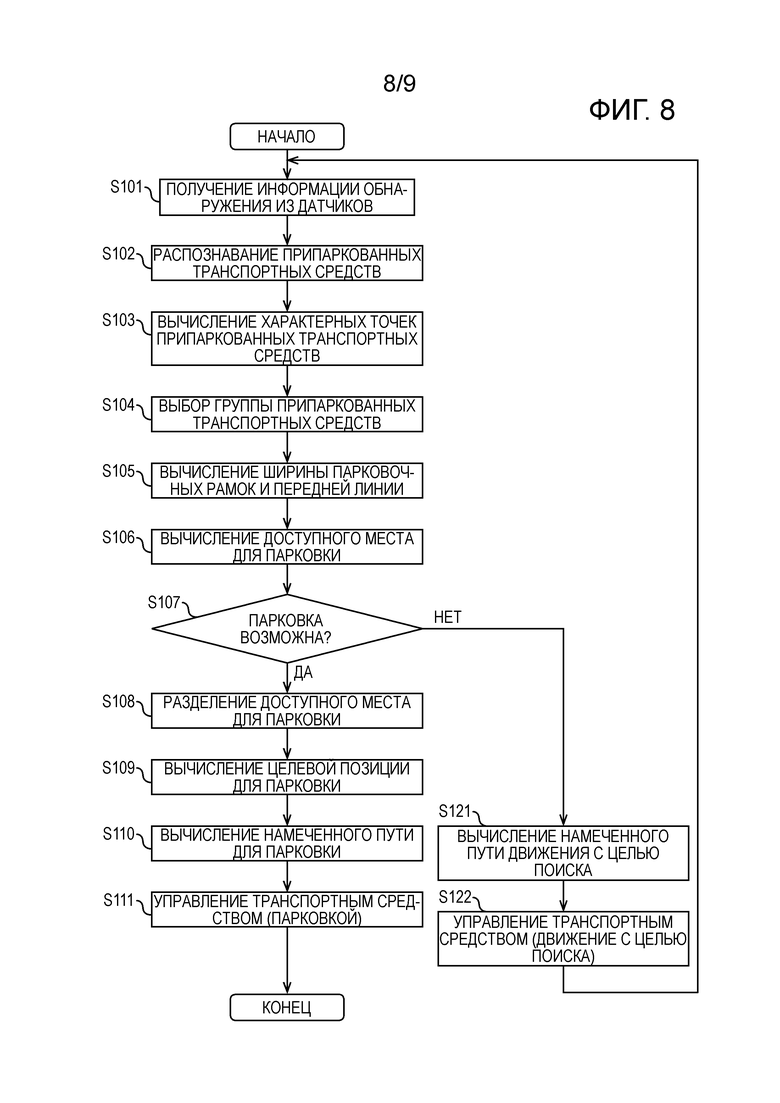
Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления процесса помощи при парковке, выполняемого посредством устройства помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
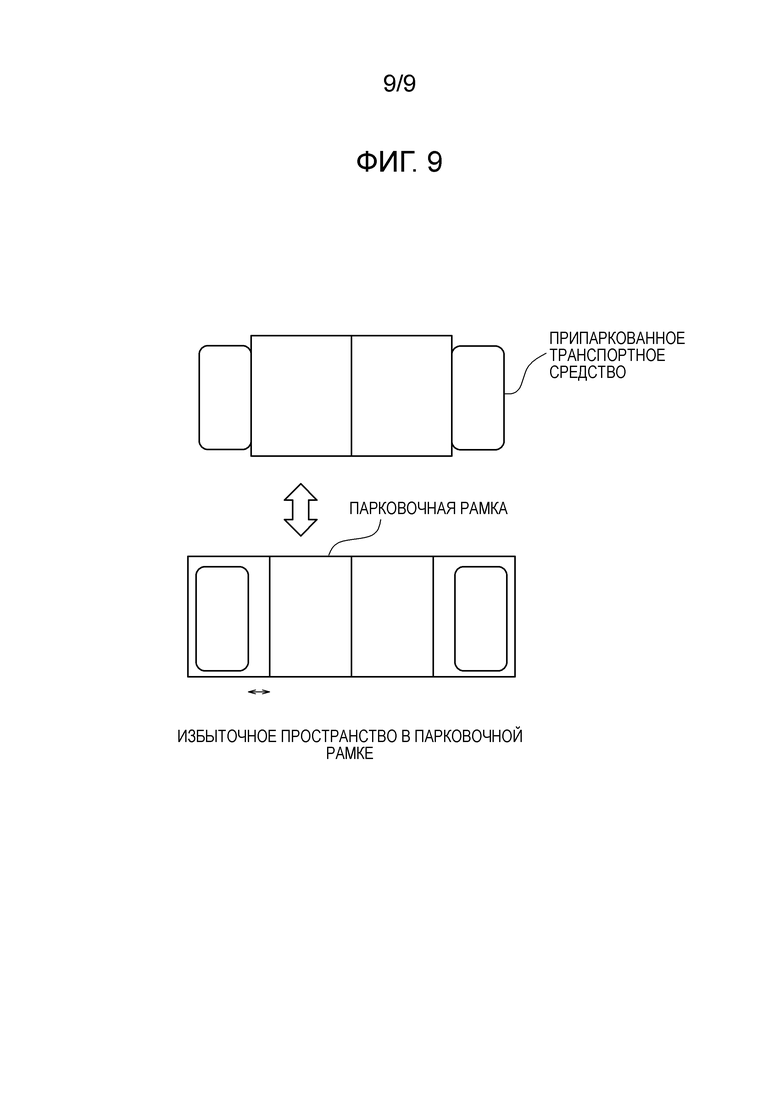
Фиг. 9 является схемой для описания способа разделения доступного места для парковки.
Режим(ы) осуществления изобретения
[0009] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Устройство 100 помощи при парковке, которое оснащено в транспортном средстве, помогает в операции перемещения (парковки) транспортного средства на место для парковки. Устройство 100 помощи при парковке включает в себя набор датчиков 10 дальности, датчик 20 проезжаемого расстояния, датчик 30 угла поворота при рулении, главный переключатель 40, электронный модуль 50 управления (ECU) помощи при парковке и ECU 60 управления транспортным средством. Устройство 100 помощи при парковке дополнительно включает в себя аппаратные модули, такие как ECU управления двигателем и ECU усиления за счет мощности (не проиллюстрированы), которые обычно оснащаются в транспортном средстве. Эти компоненты соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN, чтобы взаимно обмениваться информацией.
[0010] Как проиллюстрировано на чертеже, набор датчиков 10 дальности включает в себя, например, передний датчик 11 дальности, правосторонний датчик 12 дальности и левосторонний датчик 13 дальности. Передний датчик 11 дальности, который предоставляется в/около переднего бампера транспортного средства (рассматриваемого транспортного средства), обнаруживает полярные координаты (расстояния и ориентации) облака P0 точек отражения (см. фиг. 3) объекта, присутствующего впереди рассматриваемого транспортного средства, и выводит их в ECU 50 помощи при парковке. Правосторонний датчик 12 дальности, который предоставляется в правой стороне рассматриваемого транспортного средства (например, в передней правой части рассматриваемого транспортного средства), обнаруживает полярные координаты облака P0 точек отражения объекта, присутствующего на правой стороне рассматриваемого транспортного средства, и выводит их в ECU 50 помощи при парковке. Левосторонний датчик 13 дальности, который предоставляется в левой стороне рассматриваемого транспортного средства (например, в передней левой части рассматриваемого транспортного средства), обнаруживает полярные координаты облака P0 точек отражения объекта, присутствующего на левой стороне рассматриваемого транспортного средства, и выводит их в ECU 50 помощи при парковке.
[0011] Примеры датчиков 10 дальности включают в себя лазерные сканеры, радары и стереокамеры. Любой датчик может использоваться в качестве каждого датчика дальности, при условии, что он может обнаруживать полярные координаты облака P0 точек отражения объекта. Область обнаружения набора датчиков 10 дальности задается таким образом, чтобы иметь возможность обнаруживать полярные координаты облаков P0 точек отражения множества объектов, которые присутствуют справа и слева от намеченного пути для рассматриваемого транспортного средства.
[0012] Датчик 20 проезжаемого расстояния вычисляет величину перемещения рассматриваемого транспортного средства и выводит ее в ECU 50 помощи при парковке. Датчик 20 проезжаемого расстояния может быть сконфигурирован с использованием соответствующего датчика, такого как датчик частоты вращения, который определяет частоту вращения одного или более колес рассматриваемого транспортного средства.
[0013] Датчик 30 угла поворота при рулении, который оснащен в рулевой колонке, например, определяет угол вращения руля и выводит его в ECU 50 помощи при парковке.
[0014] Главный переключатель 40, который представляет собой переключатель для управления пользователем, чтобы вводить начало помощи при парковке, выводит сигнал выключения в ECU 50 помощи при парковке, если нет управления, и выводит сигнал включения в ECU 50 помощи при парковке в случае управления. Главный переключатель 40 располагается в соответствующей позиции, в которой водитель может управлять им, к примеру, в позиции около приборной панели и руля рассматриваемого транспортного средства. Примеры главного переключателя 40 также включают в себя программный переключатель, представленный на экране навигационного устройства, и программный переключатель, представленный на экране портативного терминала, такого как смартфон, который может обмениваться данными с транспортным средством через сеть.
[0015] ECU 50 помощи при парковке представляет собой контроллер, который интегрально управляет устройством 100 помощи при парковке. ECU 50 помощи при парковке содержит ROM 52, которое сохраняет программу помощи при парковке, CPU 51 в качестве функциональной схемы, которая выполняет программу, сохраненную в ROM 52, так что она служит в качестве устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, и RAM 53, которое служит в качестве доступного устройства хранения данных. ECU 50 помощи при парковке, в который вводится информация по обнаружению из набора датчиков 10 дальности, датчика 20 проезжаемого расстояния, датчика 30 угла поворота при рулении и главного переключателя 40, выполняет процесс помощи при парковке, который описывается ниже, затем вычисляет целевую скорость транспортного средства и целевой угол поворота при рулении рассматриваемого транспортного средства и выводит их в ECU 60 управления транспортным средством.
[0016] ECU 60 управления транспортным средством представляет собой контроллер, который выполняет управление приведением в движение транспортного средства. ECU 60 управления транспортным средством содержит ROM 62, которое сохраняет программу управления приведением в движение транспортного средства, CPU 61 в качестве функциональной схемы, которая служит в качестве устройства управления транспортного средства, и RAM 63, которое служит в качестве доступного устройства хранения данных. ECU 60 управления транспортным средством, в который вводятся целевая скорость транспортного средства и целевой угол поворота при рулении транспортного средства из ECU 50 помощи при парковке, выполняет управление приведением в движение транспортного средства, совместно с ECU управления двигателем, ECU усиления за счет мощности системы руления и т.д.
[0017] Фиг. 2 является блок-схемой для описания функций ECU 50 помощи при парковке. Как проиллюстрировано на чертеже, ECU 50 помощи при парковке содержит модуль 501 распознавания припаркованных транспортных средств, модуль 502 вычисления характерных точек транспортных средств, модуль 503 выбора групп транспортных средств, модуль 504 вычисления ширины парковочных рамок, модуль 505 вычисления доступных мест для парковки, модуль 506 определения доступности парковки, модуль 507 разделения доступного пространства для парковки, модуль 508 вычисления целевых позиций для парковки, модуль 509 вычисления намеченных путей для парковки, модуль 510 вычисления намеченных путей для поиска и модуль 511 вычисления значений команд управления транспортным средством.
[0018] Модуль 501 распознавания припаркованных транспортных средств распознает припаркованные транспортные средства на основе групп позиционной информации точек отражения (в дальнейшем называемых "облаками точек"), которые вводятся в качестве облаков полярных координат из набора датчиков 10 дальности. Модуль 501 распознавания припаркованных транспортных средств сначала выполняет преобразование координат для облаков точек, которые вводятся из переднего датчика 11 дальности, правостороннего датчика 12 дальности и левостороннего датчика 13 дальности, из полярных координат в координаты на плоскости XY для интеграции, и затем выполняет кластеризацию, чтобы извлекать облака точек из близких точек.
[0019] Фиг. 3 является видом сверху, иллюстрирующим состояние, в котором процесс распознавания для припаркованных транспортных средств выполняется на автомобильной парковке для схемы парковки под прямым углом (также называемой схемой параллельной парковки). Как проиллюстрировано на чертеже, когда припаркованные транспортные средства присутствуют на автомобильной парковке для схемы парковки под прямым углом, припаркованные транспортные средства извлекаются в качестве Г-образного облака точек посредством модуля 501 распознавания припаркованных транспортных средств. Снова ссылаясь на фиг. 2, когда облака точек, извлеченные посредством выполнения кластеризации, имеют Г-образную форму (фигуру Г), модуль 501 распознавания припаркованных транспортных средств выводит информацию относительно извлеченных облаков точек в модуль 502 вычисления характерных точек транспортных средств. Способ распознавания припаркованных транспортных средств не ограничен вышеописанным способом, и также могут использоваться другие известные способы.
[0020] Модуль 502 вычисления характерных точек транспортных средств вычисляет характерную точку P1 каждого припаркованного транспортного средства на основе информации относительно облака точек, вводимой из модуля 501 распознавания припаркованных транспортных средств. Модуль 502 вычисления характерных точек транспортных средств сначала извлекает прямую линию, представляющую переднюю поверхность припаркованного транспортного средства, припаркованного в направлении заднего хода, или заднюю поверхность припаркованного транспортного средства, припаркованного в направлении переднего хода, и затем вычисляет центральную точку извлеченной прямой линии в качестве характерной точки P1 припаркованного транспортного средства.
[0021] Здесь, одна из пары Г-образных прямых линий представляет собой прямую линию, представляющую переднюю поверхность припаркованного транспортного средства, припаркованного в направлении заднего хода, или заднюю поверхность припаркованного транспортного средства, припаркованного в направлении переднего хода, и другая прямая линия представляет собой прямую линию, представляющую боковую поверхность припаркованного транспортного средства. Как проиллюстрировано на фиг. 3, в ситуации, в которой вектор, указывающий направление рассматриваемого транспортного средства, и вектор, указывающий направление припаркованного транспортного средства, находятся под прямым углом, передняя поверхность припаркованного транспортного средства, припаркованного в направлении заднего хода, или задняя поверхность припаркованного транспортного средства, припаркованного в направлении переднего хода, попадает в пределы диапазона от 45° на левой стороне до 45° на правой стороне относительно вектора, указывающего направление рассматриваемого транспортного средства. В силу этого, модуль 502 вычисления характерных точек транспортных средств извлекает прямую линию, которая попадает в пределы диапазона от 45° на левой стороне до 45° на правой стороне относительно вектора, указывающего направление рассматриваемого транспортного средства, в качестве прямой линии, представляющей переднюю поверхность припаркованного транспортного средства, припаркованного в направлении заднего хода, или заднюю поверхность припаркованного транспортного средства, припаркованного в направлении переднего хода. Затем модуль 502 вычисления характерных точек транспортных средств вычисляет центральную точку извлеченной прямой линии в качестве характерной точки P1 припаркованного транспортного средства и выводит ее в модуль 503 выбора групп транспортных средств.
[0022] Модуль 502 вычисления характерных точек транспортных средств вычисляет не только позицию характерной точки P1 припаркованного транспортного средства, но также и направление припаркованного транспортного средства на основе направления прямой линии, представляющей переднюю поверхность или заднюю поверхность припаркованного транспортного средства, и направления прямой линии, представляющей боковую поверхность припаркованного транспортного средства, и выводит информацию относительно позиции характерной точки P1 припаркованного транспортного средства и направления припаркованного транспортного средства в модуль 503 выбора групп транспортных средств. Необязательно задавать характерную точку P1 припаркованного транспортного средства в качестве центра передней поверхности или задней поверхности припаркованного транспортного средства, и достаточно того, что характерная точка P1 задается в качестве идентичной позиции для множества припаркованных транспортных средств. Например, характерная точка P1 может задаваться в качестве правого или левого конца передней части припаркованного транспортного средства или также может задаваться в качестве центра (центра тяжести) припаркованного транспортного средства и т.п.
[0023] На основе информации относительно позиции характерной точки P1 и направления каждого припаркованного транспортного средства, вводимой из модуля 502 вычисления характерных точек транспортных средств, модуль 503 выбора групп транспортных средств выбирает группу припаркованных транспортных средств, присутствующую в группе парковочных рамок, состоявшей из последовательности парковочных рамок, которые размещаются в идентичном направлении рядом. Затем модуль 503 выбора групп транспортных средств выводит информацию относительно позиции характерной точки P1 и направления каждого припаркованного транспортного средства, которое принадлежит выбранной группе припаркованных транспортных средств, в модуль 504 вычисления ширины парковочных рамок, модуль 505 вычисления доступных мест для парковки и модуль 510 вычисления намеченных путей для поиска. В этой операции, припаркованные транспортные средства, присутствующие в парковочных рамках, имеющих различные направления, группируются в различные группы припаркованных транспортных средств. Когда группы припаркованных транспортных средств присутствуют справа и слева от рассматриваемого транспортного средства, которое движется при выполнении поиска, направления групп правых и левых припаркованных транспортных средств отличаются на 180°, и правое и левое припаркованные транспортные средства в силу этого группируются в различные группы припаркованных транспортных средств.
[0024] Способ группировки припаркованных транспортных средств не ограничен этим. Например, припаркованные транспортные средства могут еще более точно группироваться в соответствии с тем, находится или нет разнесение между припаркованными транспортными средствами в пределах предварительно определенного расстояния (например, расстояния, которое обеспечивает возможность парковки трех транспортных средств между припаркованными транспортными средствами), и когда объект, который не представляет собой транспортное средство, распознается между припаркованными транспортными средствами, припаркованные транспортные средства могут группироваться в отдельные группы припаркованных транспортных средств со ссылкой на объект в качестве границы.
[0025] Помимо этого или альтернативно, модуль 503 выбора групп транспортных средств может последовательно выполнять процесс группировки припаркованных транспортных средств каждый раз, когда информация относительно характерной точки P1 каждого припаркованного транспортного средства вводится из модуля 502 вычисления характерных точек транспортных средств, но настоящее изобретение не ограничено этим. Например, процесс группировки припаркованных транспортных средств может выполняться в то время, когда информация относительно припаркованных транспортных средств непрерывно вводится (т.е. отслеживание выполняется), так что информация комбинируется во времени. В частности, величина перемещения (так называемая одометрия) рассматриваемого транспортного средства вычисляется на основе информации по обнаружению, которая вводится из датчика 20 проезжаемого расстояния и датчика 30 угла поворота при рулении, и предшествующая информация относительно характерной точки P1 припаркованного транспортного средства и текущая информации относительно характерной точки P1 припаркованного транспортного средства интегрируются на основе результата вычисления. В этой операции, также используется информация относительно характерной точки P1 припаркованного транспортного средства, которая введена до предыдущего времени, но не вводится в это время. Это обеспечивает возможность выполнения процесса вычисления для ширины парковочных рамок, который описывается ниже, с использованием информации относительно множества припаркованных транспортных средств, которые выходят за пределы диапазона обнаружения набора датчиков 10 дальности, за счет этого повышая стабильность результатов процесса вычисления для ширины парковочных рамок.
[0026] Модуль 504 вычисления ширины парковочных рамок вычисляет ширину парковочных рамок на основе информации относительно позиций и направлений припаркованных транспортных средств, которые группируются в идентичную группу припаркованных транспортных средств, и выводит ширину в модуль 506 определения доступности парковки и модуль 507 разделения доступного пространства для парковки. Информация относительно позиций и направлений припаркованных транспортных средств вводится из модуля 503 выбора групп транспортных средств.
[0027] Фиг. 4 является схемой для описания взаимосвязи между шириной парковочных рамок и единичным расстоянием d между характерными точками. Как проиллюстрировано на чертеже, ширина парковочных рамок является приблизительно идентичной с расстоянием d между характерными точками P1 двух припаркованных транспортных средств, присутствующих в смежных парковочных рамках (это расстояние d здесь и в дальнейшем называется "единичным расстоянием d между характерными точками").
[0028] Фиг. 5 является схемой для описания взаимосвязи между шириной парковочных рамок и расстоянием D между характерными точками, когда одна или более незанятых парковочных рамок присутствуют между транспортными средствами, припаркованными рядом. Как проиллюстрировано на чертеже, расстояние D между характерными точками является приблизительно целым кратным единичного расстояния d между характерными точками (≈ ширине парковочных рамок). Таким образом, расстояние D между характерными точками двух припаркованных транспортных средств, присутствующих в парковочных рамках, смежных друг с другом, равно единичному расстоянию d между характерными точками, расстояние D между характерными точками двух припаркованных транспортных средств, присутствующих в парковочных рамках, смежных друг с другом, но с одной парковочной рамкой между ними, в два раза превышает единичное расстояние d между характерными точками, и расстояние D между характерными точками двух припаркованных транспортных средств, присутствующих в парковочных рамках, смежных друг с другом, но с двумя парковочными рамками между ними, в три раза превышает единичное расстояние d между характерными точками.
[0029] В силу этого, модуль 504 вычисления ширины парковочных рамок вычисляет ширину парковочных рамок с использованием единичного расстояния d между характерными точками. В частности, допускаемое значение dx сначала задается в качестве единичного расстояния d между характерными точками. Допускаемое значение dx является значением, которое соответствует фактической ширине парковочных рамок (например, 2,2-3,3 м).
[0030] Затем, для всех вычисленных расстояний D между характерными точками, вычисляется ошибка de между каждым расстоянием D между характерными точками и допускаемым значением dx. Вычисление ошибки de включает в себя разделение расстояния D между характерными точками посредством допускаемого значения dx, чтобы вычислять остаток dr. Когда остаток dr превышает dx x 1/2, ошибка de вычисляется с использованием следующего уравнения (1). Когда остаток dr не превышает dx x 1/2, ошибка de вычисляется с использованием следующего уравнения (2).
de=dx-dr... (1)
de=dr... (2)
[0031] Затем, вычисляется сумма de_sum ошибок de, вычисленных для расстояний D между характерными точками. После этого допускаемое значение dx, которое обеспечивает минимальную сумму de_sum ошибок, определяется в качестве значения единичного расстояния d между характерными точками.
[0032] Ниже поясняются некоторые ситуации, в которых, как проиллюстрировано на фиг. 5, модуль 503 выбора групп транспортных средств выбирает четыре припаркованных транспортных средства V1-V4 в качестве группы припаркованных транспортных средств, расстояние D12 между характерными точками припаркованного транспортного средства V1 и припаркованного транспортного средства V2 составляет 6,2 м, расстояние D23 между характерными точками припаркованного транспортного средства V2 и припаркованного транспортного средства V3 составляет 9,3 м, и расстояние D34 между характерными точками припаркованного транспортного средства V3 и припаркованного транспортного средства V4 составляет 2,8 м.
[0033] Поясняется первый случай, в котором допускаемое значение dx единичного расстояния d между характерными точками составляет 3,0 м. В этом случае, остаток dr для расстояния D12 между характерными точками составляет 0,2 м, остаток dr для расстояния D23 между характерными точками составляет 0,3 м, и остаток dr для расстояния D34 между характерными точками составляет 2,8 м. Здесь, остаток dr не превышает dx x 1/2 для расстояний D12 и D23 между характерными точками; в силу этого ошибка de расстояния D12 между характерными точками составляет 0,2 м, и ошибка de расстояния D23 между характерными точками составляет 0,3 м. С другой стороны, остаток dr превышает dx x 1/2 для расстояния D34 между характерными точками; в силу этого ошибка de расстояния D34 между характерными точками составляет 0,2 м (3,0-2,8=0,2). Таким образом, сумма de_sum ошибок составляет 0,7 м.
[0034] Поясняется второй случай, в котором допускаемое значение dx единичного расстояния d между характерными точками составляет 3,1 м. В этом случае, остаток dr для расстояния D12 между характерными точками составляет 0,0 м, остаток dr для расстояния D23 между характерными точками составляет 0,0 м, и остаток dr для расстояния D34 между характерными точками составляет 2,8 м. Здесь, остаток dr не превышает dx x 1/2 для расстояний D12 и D23 между характерными точками; в силу этого ошибка de расстояния D12 между характерными точками составляет 0,0 м, и ошибка de расстояния D23 между характерными точками составляет 0,0 м. С другой стороны, остаток dr превышает dx x 1/2 для расстояния D34 между характерными точками; в силу этого ошибка de расстояния D34 между характерными точками составляет 0,3 м (3,1-2,8=0,3). Таким образом, сумма de_sum ошибок составляет 0,3 м.
[0035] Поясняется третий случай, в котором допускаемое значение dx единичного расстояния d между характерными точками составляет 3,2 м. В этом случае, остаток dr для расстояния D12 между характерными точками составляет 3,0 м, остаток dr для расстояния D23 между характерными точками составляет 2,9 м, и остаток dr для расстояния D34 между характерными точками составляет 2,8 м. Здесь, все остатки dr превышают dx x 1/2; в силу этого ошибка de расстояния D12 между характерными точками составляет 0,2 м (3,2-3,0=0,2), ошибка de расстояния D23 между характерными точками составляет 0,3 м (3,2-2,9=0,3), и ошибка de расстояния D34 между характерными точками составляет 0,4 м (3,2-2,8=0,4). Таким образом, сумма de_sum ошибок составляет 0,9 м.
[0036] Описание опускается для случаев допускаемого значения dx, составляющего 2,2-2,9 м и 3,3 м, но подтверждено, что отсутствуют случаи, в которых сумма de_sum ошибок меньше 0,3 м. Из вышеозначенного, сумма de_sum ошибок минимизируется, когда допускаемое значение dx единичного расстояния d между характерными точками составляет 3,1 м, так что оптимальное значение единичного расстояния d между характерными точками составляет 3,1 м.
[0037] Описан способ использования расстояний D между характерными точками для того, чтобы вычислять ширину парковочных рамок, но настоящее изобретение не ограничено этим. Например, прямая линия, соединяющая множество характерных точек P1 (в дальнейшем называемая "передней линией"), может подгоняться с использованием соответствующей схемы, такой как согласование на основе случайных выборок (RANSC), и может использоваться расстояние между характерными точками P1 на передней линии.
[0038] Затем, ширина парковочных рамок вычисляется. Как проиллюстрировано на фиг. 5, в случае схемы парковки под прямым углом, которая не представляет собой схему парковки под углом, направление ширины парковочных рамок и направление размещения парковочных рамок являются идентичными, и ширина парковочных рамок в силу этого вычисляется как единичное расстояние d между характерными точками. С другой стороны, в случае схемы парковки под углом, как проиллюстрировано на фиг. 6, направление ширины парковочных рамок является наклонным под предварительно определенным углом α относительно направления размещения парковочных рамок (направления прохождения передней линии), и ширина парковочных рамок в силу этого вычисляется как d x sin α.
[0039] В случае схемы парковки под прямым углом, угол α составляет 90°, и ширина парковочных рамок составляет d x sin 90°=d, так что ширина парковочных рамок может вычисляться как d x sin α, как и в случае схемы парковки под углом (ширина=d x sin α). Тем не менее, обнаружение направлений припаркованных транспортных средств заключает в себе ошибки, и в силу этого предпочтительно вычислять ширину парковочных рамок в качестве единичного расстояния d между характерными точками (ширина=d), если схема парковки может определяться в качестве схемы парковки под прямым углом, а не схемы парковки под углом.
[0040] Модуль 505 вычисления доступных мест для парковки вычисляет незанятое место для парковки (т.е. доступное место для парковки) на основе информации относительно облаков точек, которая вводится из набора датчиков 10 дальности, и выводит незанятое место для парковки в модуль 506 определения доступности парковки и модуль 507 разделения доступных мест для парковки. Примеры способов обнаружения незанятого места для парковки включают в себя способ вычисления так называемой карты с координатной сеткой (карты с координатной сеткой, полученной посредством разделения места на сетчатые места) с использованием технологии одновременной локализации и отображения на карте (SLAM). Карта с координатной сеткой указывает то, является каждое место для парковки незанятым или занятым.
[0041] Модуль 505 вычисления доступных мест для парковки извлекает незанятое место для парковки, например, на основе информации относительно передней линии группы припаркованных транспортных средств, вводимой из модуля 504 вычисления ширины/угла парковочных рамок, и вычисленной карты с координатной сеткой. В примере, проиллюстрированном на фиг. 5, место для парковки, соответствующее одной рамке на левой стороне на чертеже, и место для парковки, соответствующее двум рамкам в центре на чертеже, вычисляются как доступное место для парковки.
[0042] Модуль 506 определения доступности парковки определяет то, возможна или нет парковка рассматриваемого транспортного средства на доступном месте для парковки, на основе информации относительно ширины парковочных рамок, вводимой из модуля 504 вычисления ширины парковочных рамок, информации относительно доступного места для парковки, вводимой из модуля 505 вычисления доступных мест для парковки, и информации относительно ширины v_width транспортного средства для рассматриваемого транспортного средства, и выводит результат определения в модуль 511 вычисления значений команд управления транспортным средством.
[0043] Во-первых, модуль 506 определения доступности парковки сравнивает ширину v_width транспортного средства для рассматриваемого транспортного средства с шириной парковочных рамок и выполняет определение того, что парковка рассматриваемого транспортного средства на доступном месте для парковки возможна, когда удовлетворяется условие следующего выражения (3).
v_width<width+width_threshold... (3)
width_threshold является значением, которое предварительно задается, чтобы обеспечивать место, необходимое для посадки и выхода из рассматриваемого транспортного средства, в доступном месте для парковки. Здесь, когда необязательно принимать во внимание посадку и выход человека, к примеру, в случае автоматизированного вождения, width_threshold может задаваться небольшим.
[0044] После этого, модуль 506 определения доступности парковки вычисляет ширину area_width, когда доступное место для парковки проецируется на переднюю линию, и выполняет определение того, что парковка рассматриваемого транспортного средства на доступном месте для парковки возможна, когда удовлетворяется условие следующего выражения (4). Таким образом, модуль 506 определения доступности парковки определяет то, является или нет ширина доступного места для парковки достаточной.
v_width<area_width+width_threshold... (4)
[0045] Модуль 507 разделения доступных мест для парковки разделяет доступное место для парковки на число Pnum парковочных рамок на основе информации относительно ширины парковочных рамок, вводимой из модуля 504 вычисления ширины парковочных рамок, и информации относительно доступного места для парковки, вводимой из модуля 505 вычисления доступных мест для парковки, и выводит информацию относительно разделенных доступных мест для парковки в модуль 508 вычисления целевых позиций для парковки.
[0046] Во-первых, модуль 507 разделения доступных мест для парковки вычисляет число Pnum парковочных рамок, присутствующих в доступном месте для парковки. Способ вычисления числа Pnum парковочных рамок включает в себя вычисление ширины area_width (=D x sin α), когда доступное место для парковки проецируется на переднюю линию. Способ дополнительно включает в себя деление ширины area_width на ширину парковочных рамок, чтобы вычислять "частное Wq и остаток Wr. Затем в случае Wq-Wr<A, число парковочных рамок вычисляется как Pnum=Wq+1, а в случае Wq-Wr≥A, число парковочных рамок вычисляется как Prum=Wq. Значение A при использовании в данном документе является значением, которое предварительно задается, чтобы трактовать остаток Wr в качестве ширины парковочных рамок, когда остаток Wr меньше ширины одной парковочной рамки, но удовлетворяется Wr≈width.
[0047] Примеры способов, осуществляемых посредством модуля 507 разделения доступных мест для парковки, чтобы разделять доступное место для парковки, включают в себя нижеприведенный пример. Фиг. 7 является схемой для описания способа разделения доступного места для парковки согласно этому примеру. Как проиллюстрировано в верхней части чертежа, модуль 507 разделения доступных мест для парковки сначала использует ширину парковочных рамок, вычисленную посредством модуля 504 вычисления ширины парковочных рамок, и переднюю линию, чтобы создавать лестничную виртуальную рамку, в которой виртуализирована последовательность парковочных рамок. Прямая линия, представляющая переднюю часть виртуальной рамки, смещается немного к ближней стороне относительно передней линии. Величина смещения при использовании в данном документе может задаваться таким образом, что все припаркованные транспортные средства, включенные в группу припаркованных транспортных средств, попадают внутрь виртуальной рамки, либо также может быть значением, которое предварительно задается. Длина (глубина) каждой парковочной рамки виртуальной рамки может иметь значение, которое предварительно задается в соответствии с длиной широко используемой парковочной рамки.
[0048] После этого, модуль 507 разделения доступных мест для парковки задает позицию виртуальной рамки в направлении справа налево (в направлении, в котором размещаются парковочные рамки). Во-первых, как проиллюстрировано в верхней части по фиг. 7, позиция характерной точки P1 припаркованного транспортного средства проецируется на переднюю часть виртуальной рамки, и вычисляется величина смещения между позицией проецируемой характерной точки P1 и центром передней части парковочной рамки, ближайшей к этой позиции. Этот процесс вычисления величины смещения выполняется для всех припаркованных транспортных средств, и вычисляется среднее значение вычисленных величин смещения. Затем виртуальная рамка перемещается в направлении справа налево посредством вычисленного среднего значения величин смещения, чтобы за счет этого задавать оптимальную позицию виртуальной рамки, как проиллюстрировано в нижней части по фиг. 7.
[0049] После этого, модуль 507 разделения доступных мест для парковки сравнивает доступное место для парковки, которое вводится из модуля 505 вычисления доступных мест для парковки, с виртуальной рамкой и выводит информацию относительно доступного места для парковки, которое должно разделяться в виртуальной рамке, в модуль 508 вычисления целевых позиций для парковки.
[0050] Снова ссылаясь на фиг. 2, когда информация разделения доступного места для парковки (т.е. информация относительно разделенных доступных мест для парковки) вводится из модуля 507 разделения доступных мест для парковки, модуль 508 вычисления целевых позиций для парковки выбирает одно из разделенных доступных мест для парковки и вычисляет целевую позицию для парковки в выбранном доступном месте для парковки. Примеры способа выбора одного из доступных мест для парковки включают в себя способ выбора доступного места для парковки, ближайшего к рассматриваемому транспортному средству. Примеры способа вычисления целевой позиции для парковки включают в себя способ ее задания в качестве центральной задней стороны выбранного доступного места для парковки.
[0051] Модуль 509 вычисления намеченных путей для парковки вычисляет намеченный путь для парковки в целевой позиции для парковки, которая вводится из модуля 508 вычисления целевых позиций для парковки. Способ вычисления намеченного пути для парковки не ограничен конкретным образом, и могут использоваться различные известные способы.
[0052] Модуль 510 вычисления намеченных путей для поиска вычисляет намеченный путь движения для поиска доступного места для парковки, когда парковка невозможна. Поиск доступного места для парковки выполняется с использованием информации относительно передней линии, которая вводится из модуля 504 вычисления ширины парковочных рамок. Например, базовая линия движения создается посредством смещения передней линии к стороне намеченного пути движения транспортного средства, и вычисляется намеченный путь для движения по базовой линии движения из текущей позиции рассматриваемого транспортного средства. В этом случае, рассматриваемое транспортное средство движется вдоль последовательности парковочных рамок.
[0053] На основе информации, вводимой из модуля 506 определения доступности парковки, в отношении того, возможна или нет парковка рассматриваемого транспортного средства на доступном месте для парковки, модуль 511 вычисления значений команд управления транспортным средством вычисляет значение команды управления транспортным средством для движения вдоль намеченного пути для парковки, вводимого из модуля 509 вычисления намеченных путей для парковки, когда парковка возможна, и вычисляет значение команды управления транспортным средством для движения вдоль намеченного пути для поиска, который вводится из модуля 510 вычисления намеченных путей для поиска, когда парковка невозможна. После этого модуль 511 вычисления значений команд управления транспортным средством выводит вычисленное значение команды управления транспортным средством в ECU 60 управления транспортным средством. Примеры значения команды управления транспортным средством включают в себя целевую скорость транспортного средства и целевой угол поворота при рулении, например, но в них могут быть включены другие значения команд управления, такие как ускорение рассматриваемого транспортного средства. Способ вычисления значения команды управления транспортным средством не ограничен конкретным образом, и могут использоваться различные известные способы.
[0054] Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления процесса помощи при парковке, выполняемого посредством устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Когда сигнал включения вводится из главного переключателя 40 в ECU 50 помощи при парковке, начинается процесс помощи при парковке, после чего выполняется этап S101.
[0055] На этапе S101, информация по обнаружению вводится из набора датчиков 10 дальности, датчика 20 проезжаемого расстояния и датчика 30 угла поворота при рулении в ECU 50 помощи при парковке. Затем на этапе S102, модуль 501 распознавания припаркованных транспортных средств распознает припаркованные транспортные средства на основе информации относительно облаков точек, которая вводится в качестве облаков полярных координат из набора датчиков 10 дальности.
[0056] Затем на этапе S103, модуль 502 вычисления характерных точек транспортных средств вычисляет характерную точку P1 каждого припаркованного транспортного средства на основе информации относительно облаков точек, которая вводится из модуля 501 распознавания припаркованных транспортных средств. Затем на этапе S104, модуль 503 выбора групп транспортных средств выбирает группу припаркованных транспортных средств, присутствующую в последовательности парковочных рамок, направления и т.п. которых являются идентичными, на основе информации относительно позиции характерной точки P1 и направления каждого припаркованного транспортного средства, причем эта информация вводится из модуля 502 вычисления характерных точек транспортных средств.
[0057] Затем на этапе S105, модуль 504 вычисления ширины парковочных рамок вычисляет ширину парковочных рамок и передней линии на основе информации относительно позиций и направлений припаркованных транспортных средств, которые группируются в идентичную группу припаркованных транспортных средств, причем эта информация вводится из модуля 503 выбора групп транспортных средств. Затем на этапе S106, модуль 505 вычисления доступных мест для парковки вычисляет доступное место для парковки на основе информации относительно облаков точек, которая вводится из набора датчиков 10 дальности.
[0058] Затем на этапе S107, модуль 506 определения доступности парковки определяет то, возможна или нет парковка рассматриваемого транспортного средства на доступном месте для парковки, на основе информации относительно ширины парковочных рамок, вводимой из модуля 504 вычисления ширины парковочных рамок, информации относительно доступного места для парковки, вводимой из модуля 505 вычисления доступных мест для парковки, и информации относительно ширины v_width транспортного средства для рассматриваемого транспортного средства. На этапе S107, когда выполняется определение в отношении того, что парковка рассматриваемого транспортного средства возможна, процедура переходит к этапу S108, в то время как когда выполняется определение в отношении того, что парковка рассматриваемого транспортного средства невозможна, процедура переходит к этапу S121.
[0059] На этапе S121, модуль 510 вычисления намеченных путей для поиска вычисляет намеченный путь движения для поиска доступного места для парковки с использованием информации относительно передней линии, которая вводится из модуля 504 вычисления ширины парковочных рамок. Затем на этапе S122, модуль 511 вычисления значений команд управления транспортным средством вычисляет значение команды управления транспортным средством для движения вдоль намеченного пути движения для поиска, который вводится из модуля 510 вычисления намеченных путей для поиска, и ECU 60 управления транспортным средством выполняет управление приведением в движение для транспортного средства в соответствии со значением команды управления транспортным средством, которое вводится из модуля 511 вычисления значений команд управления транспортным средством.
[0060] С другой стороны, на этапе S108, модуль 507 разделения доступных мест для парковки разделяет доступное место для парковки на число Pnum парковочных рамок на основе информации относительно ширины парковочных рамок, вводимой из модуля 504 вычисления ширины парковочных рамок, и информации относительно доступного места для парковки, вводимой из модуля 505 вычисления доступных мест для парковки. Затем на этапе S109, модуль 508 вычисления целевых позиций для парковки выбирает одно из разделенных доступных мест для парковки и вычисляет целевую позицию для парковки на выбранном доступном месте для парковки.
[0061] Затем на этапе S110, модуль 509 вычисления намеченных путей для парковки вычисляет намеченный путь для парковки в целевой позиции для парковки, которая вводится из модуля 508 вычисления целевых позиций для парковки. Затем на этапе S111, модуль 511 вычисления значений команд управления транспортным средством вычисляет значение команды управления транспортным средством для движения вдоль намеченного пути для парковки, который вводится из модуля 509 вычисления намеченных путей для парковки, и ECU 60 управления транспортным средством выполняет управление приведением в движение для транспортного средства в соответствии со значением команды управления транспортным средством, которое вводится из модуля 511 вычисления значений команд управления транспортным средством. Таким образом, процесс помощи при парковке завершается.
[0062] В вышеописанной процедуре управления процесса помощи при парковке, после того, как вычисляется целевая позиция для парковки, операция парковки выполняется для того, чтобы завершать процесс помощи при парковке, но настоящее изобретение не ограничено этим, и процедура может возвращаться от этапа S111 к этапу S102, чтобы последовательно корректировать (смещать) целевую позицию для парковки.
[0063] Как описано выше, в способе помощи при парковке и устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, процесс включает в себя получение, из набора датчиков 10 дальности, информации распознавания относительно множества припаркованных транспортных средств, присутствующих в группе парковочных рамок, содержащей множество парковочных рамок, размещаемых рядом, выбор характерных точек P1 припаркованных транспортных средств из информации распознавания, вычисление расстояния D между характерными точками, которое представляет собой расстояние между характерными точками P1 рядом друг с другом, и вычисление ширины парковочных рамок на основе расстояния D между характерными точками. Через эту операцию, по сравнению со случаем задания множества парковочных рамок с использованием ширины парковочных рамок, которая предварительно задается, могут уменьшаться ошибки между шириной парковочных рамок, которая должна задаваться, и фактическими ширинами парковочных рамок, и в силу этого могут надлежащим образом задаваться парковочные рамки.
[0064] В способе помощи при парковке и устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, информация распознавания относительно трех или более припаркованных транспортных средств, присутствующих в группе парковочных рамок, содержащей три или более парковочных рамок, получается из набора датчиков 10 дальности, характерные точки P1 трех или более припаркованных транспортных средств выбираются из информации распознавания, и ширина парковочных рамок вычисляется на основе информации относительно множества расстояний D между характерными точками. Это обеспечивает возможность вычисления ширины парковочных рамок на основе информации относительно большего числа расстояний D между характерными точками, и ширина парковочных рамок в силу этого может вычисляться более точно.
[0065] В способе помощи при парковке и устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, процесс включает в себя задание допускаемого значения dx в качестве единичного расстояния d между характерными точками, которое является приблизительно идентичным с шириной парковочных рамок, и вычисление ошибки de из целого кратного допускаемого значения dx для каждого из множества расстояний D между характерными точками, вычисленных из информации распознавания относительно трех или более припаркованных транспортных средств. Здесь, ошибка de вычисляется каждый раз, когда допускаемое значение dx варьируется. Затем допускаемое значение dx, которое обеспечивает минимальную сумму de_sum ошибок, вычисляется как ширина парковочных рамок. Это обеспечивает возможность надлежащего вычисления ширины парковочных рамок.
[0066] В способе помощи при парковке и устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, процесс включает в себя вычисление направлений припаркованных транспортных средств из информации распознавания, которая вводится из набора датчиков 10 дальности, и вычисление направления (наклонного угла α относительно передней линии) парковочных рамок на основе вычисленных направлений припаркованных транспортных средств и позиций характерных точек P1. Это обеспечивает возможность надлежащего задания направления парковочных рамок даже на автомобильной парковке для схемы парковки под углом.
[0067] Помимо этого или альтернативно, когда направление ширины парковочных рамок является наклонным относительно направления, в котором размещаются парковочные рамки (направления прохождения передней линии), ширина парковочных рамок вычисляется на основе наклонного угла α (width=d x sin α). Это обеспечивает возможность надлежащего вычисления ширины парковочных рамок даже на автомобильной парковке для схемы парковки под углом.
[0068] В способе помощи при парковке и устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, процесс включает в себя обнаружение незанятого места (доступного места для парковки), присутствующего в группе парковочных рамок, из информации распознавания и определение того, возможна или нет парковка рассматриваемого транспортного средства на доступном месте для парковки, на основе вычисленной ширины парковочных рамок и ширины v_width транспортного средства для рассматриваемого транспортного средства. Группа парковочных рамок содержит множество парковочных рамок, размещаемых рядом. Информация распознавания вводится из набора датчиков 10 дальности. Через эту операцию, когда парковка физически возможна, но предпочтительно не парковаться, может выполняться определение в отношении того, что парковка невозможна. Например, когда правое и левое припаркованные транспортные средства расположены на противоположных сторонах относительно парковочной рамки, выделяемой для малолитражного транспортного средства (транспортного средства с небольшим рабочим объемом двигателя), даже если обычный автомобиль может физически парковаться в парковочной рамке, выделяемой для малолитражного транспортного средства (транспортного средства с небольшим рабочим объемом двигателя), может выполняться определение в отношении того, что парковка невозможна.
[0069] Помимо этого или альтернативно, вышеуказанное доступное место для парковки может разделяться на множество мест для парковки в соответствии с вычисленной шириной парковочных рамок, чтобы за счет этого задавать ширину и число незанятых парковочных рамок таким образом, что они совпадают с фактической ситуацией группы парковочных рамок.
[0070] Помимо этого или альтернативно, процесс включает в себя вычисление виртуальной рамки, состоящей из множества виртуальных парковочных рамок, имеющих вычисленную ширину парковочных рамок, перекрытие виртуальной рамки, доступного места для парковки и распознанных припаркованных транспортных средств таким образом, что каждое из припаркованных транспортных средств попадает в любую из виртуальных парковочных рамок, и разделение доступного места для парковки на множество мест для парковки, секционированных с помощью виртуальных парковочных рамок. Здесь, посредством минимизации ошибки между центром в направлении ширины транспортного средства для припаркованного транспортного средства и центром в направлении ширины парковочной рамки, можно надлежащим образом задавать парковочную рамку, как проиллюстрировано на фиг. 9, с учетом избыточного пространства для обеспечения возможности человеку садиться и выходить и т.д.
[0071] В способе помощи при парковке и устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, процесс включает в себя задание одной из парковочных рамок, полученных посредством разделения доступного места для парковки, в качестве целевой позиции для парковки, вычисление намеченного пути для парковки в целевую позицию для парковки и управление рассматриваемым транспортным средством таким образом, что оно движется по намеченному пути для парковки. Это обеспечивает возможность выполнения автоматизированной парковки без операции, выполняемой водителем.
[0072] Помимо этого или альтернативно, процесс включает в себя вычисление намеченного пути для поиска для движения с целью поиска на автомобильной парковке на основе позиций характерных точек P1 и управление рассматриваемым транспортным средством таким образом, что оно движется по вышеуказанному намеченному пути для поиска, когда выполняется определение в отношении того, что парковка рассматриваемого транспортного средства невозможна на доступном месте для парковки. Это обеспечивает автоматизированное выполнение движения из движения с целью поиска для обнаружения доступного места для парковки в целевую позицию для парковки без операции, выполняемой водителем.
[0073] В вышеописанных вариантах осуществления, "устройство 100 помощи при парковке" соответствует примеру "устройства помощи при парковке" в настоящем изобретении, "модуль 501 распознавания припаркованных транспортных средств" соответствует примеру "модуля получения информации распознавания" в настоящем изобретении, "модуль 502 вычисления характерных точек транспортных средств" соответствует примеру "модуля выбора характерных точек" и "модуля вычисления расстояния, выполненного с возможностью вычислять расстояние между характерными точками" в настоящем изобретении, и "модуль 504 вычисления ширины парковочных рамок" соответствует примеру "модуля вычисления ширины парковочных рамок" в настоящем изобретении.
[0074] В вышеописанных вариантах осуществления, "характерная точка P1" соответствует примеру "характерных точек" в настоящем изобретении, "расстояние D между характерными точками" соответствует примеру "расстояния между характерными точками" в настоящем изобретении, "допускаемое значение dx" соответствует примеру "допускаемого значения" в настоящем изобретении, "ошибка de" соответствует примеру "ошибки" в настоящем изобретении, и сумма de_sum ошибок" соответствует примеру "суммы ошибок" в настоящем изобретении.
[0075] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0076] Например, вышеописанные варианты осуществления описываются при условии, что одна или более камер оснащены в рассматриваемом транспортном средстве, но настоящее изобретение не ограничено этим, и один или более вариантов осуществления настоящего изобретения могут выполняться при условии, что используется стационарная камера, предоставленная на автомобильной парковке, камера другого транспортного средства и/или портативная камера пользователя. В таких случаях, информация относительно мест для парковки может получаться из внешнего мира, чтобы воспринимать состояние парковки в местах для парковки.
Описание номеров ссылок
[0077] 100 - устройство помощи при парковке
501 - модуль распознавания припаркованных транспортных средств
502 - модуль вычисления характерных точек транспортных средств
503 - модуль выбора групп транспортных средств
504 - модуль вычисления ширины парковочных рамок

Предусмотрен способ, который содержит: получение, из набора датчиков (10) дальности, информации распознавания относительно множества припаркованных транспортных средств, присутствующих в группе парковочных рамок, содержащей множество парковочных рамок, размещаемых рядом; выбор характерных точек (P1) припаркованных транспортных средств из информации распознавания; вычисление расстояния (D) между характерными точками, которое представляет собой расстояние между характерными точками (P1) рядом друг с другом; и вычисление ширины парковочных рамок на основе расстояния (D) между характерными точками. 2 н. и 7 з.п. ф-лы, 9 ил.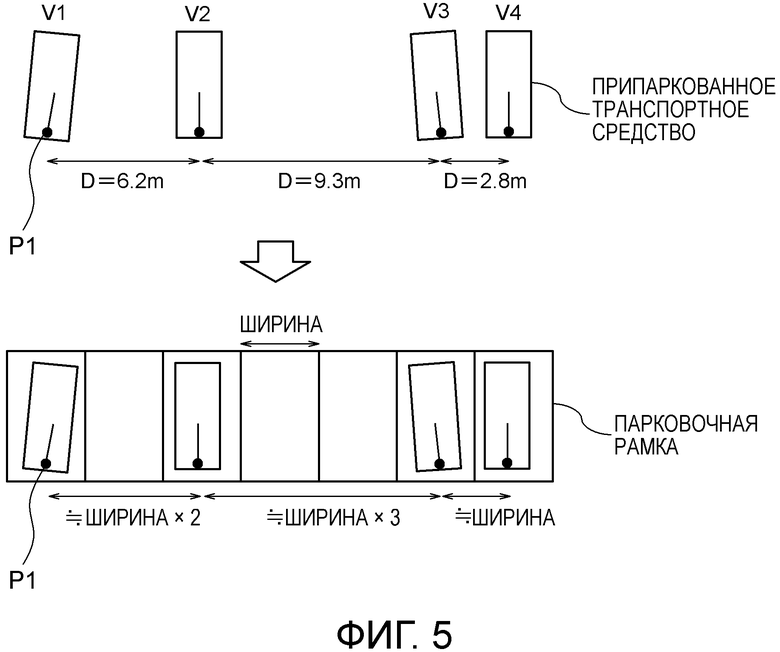
1. Способ помощи при парковке, содержащий этапы, на которых:
- получают информацию распознавания относительно трех или более припаркованных транспортных средств, присутствующих в группе парковочных рамок, содержащей три или более парковочных рамок, размещенных рядом;
- выбирают характерные точки, заданные в идентичных позициях трех или более припаркованных транспортных средств, из информации распознавания;
- вычисляют расстояние между характерными точками, которое представляет собой расстояние между характерными точками, смежными друг с другом;
- задают допускаемое значение в качестве ширины парковочных рамок и вычисляют ошибки между множеством расстояний между характерными точками и значением целого, кратного допускаемому значению; и
- вычисляют допускаемое значение, которое обеспечивает минимальную сумму ошибок, в качестве ширины парковочных рамок.
2. Способ помощи при парковке по п. 1, содержащий этапы, на которых:
- вычисляют направления припаркованных транспортных средств из информации распознавания; и
- вычисляют направление парковочных рамок на основе вычисленных направлений припаркованных транспортных средств и позиций характерных точек.
3. Способ помощи при парковке по п. 2, содержащий этап, на котором:
- вычисляют ширину парковочных рамок на основе вычисленного направления парковочных рамок.
4. Способ помощи при парковке по п. 1, содержащий этапы, на которых:
- обнаруживают незанятое место для парковки, присутствующее в группе парковочных рамок, из информации распознавания; и
- определяют то, возможна или нет парковка рассматриваемого транспортного средства на незанятом месте для парковки, на основе вычисленной ширины парковочных рамок и ширины транспортного средства для рассматриваемого транспортного средства.
5. Способ помощи при парковке по п. 4, содержащий этап, на котором:
- разделяют незанятое место для парковки на множество мест для парковки в соответствии с вычисленной шириной парковочных рамок.
6. Способ помощи при парковке по п. 5, содержащий этапы, на которых:
- вычисляют виртуальную рамку, состоящую из множества виртуальных парковочных рамок, имеющих вычисленную ширину парковочных рамок; и
- перекрывают виртуальную рамку, незанятое место для парковки и припаркованные транспортные средства, распознанные таким образом, что каждое из припаркованных транспортных средств попадает в любую из виртуальных парковочных рамок, и разделяют незанятое место для парковки на множество мест для парковки, секционированных с помощью виртуальных парковочных рамок.
7. Способ помощи при парковке по любому из пп. 4-6, содержащий этапы, на которых:
- задают одно из множества мест для парковки в качестве целевой позиции для парковки;
- вычисляют путь для парковки в целевую позицию для парковки; и
- управляют рассматриваемым транспортным средством таким образом, что оно движется вдоль упомянутого пути для парковки.
8. Способ помощи при парковке по п. 7, содержащий этапы, на которых:
- вычисляют путь для поиска для движения с целью поиска на автомобильной парковке на основе позиций характерных точек; и
- управляют рассматриваемым транспортным средством таким образом, что оно движется по упомянутому пути для поиска, когда выполняется определение в отношении того, что парковка рассматриваемого транспортного средства на незанятом месте для парковки невозможна.
9. Устройство помощи при парковке, содержащее:
- модуль получения информации распознавания, выполненный с возможностью получать информацию распознавания относительно трех или более припаркованных транспортных средств, присутствующих в группе парковочных рамок, содержащей три или более парковочных рамок, размещенных рядом;
- модуль выбора характерных точек, выполненный с возможностью выбирать характерные точки, заданные в идентичных позициях трех или более припаркованных транспортных средств, из информации распознавания;
- модуль вычисления расстояния, выполненный с возможностью вычислять расстояние между характерными точками, которое представляет собой расстояние между характерными точками, смежными друг с другом; и
- модуль вычисления ширины парковочных рамок, выполненный с возможностью вычислять ширину парковочных рамок на основе множества расстояний между характерными точками,
причем модуль вычисления ширины парковочных рамок дополнительно выполнен с возможностью:
- задавать допускаемое значение в качестве ширины парковочных рамок и вычислять ошибки между расстояниями между характерными точками и значением целого, кратного допускаемому значению; и
- вычислять допускаемое значение, которое обеспечивает минимальную сумму ошибок, в качестве ширины парковочных рамок.
| Устройство для промысла креветки и трубача | 2017 |
|
RU2653367C1 |
| JP 2014054912 A, 27.03.2014 | |||
| JP 2013220745 A, 28.10.2013 | |||
| US 2010274446 A1, 28.10.2010 | |||
| KR 1020120035122 A, 13.04.2012 | |||
| JP 2014196040 A, 16.10.2014 | |||
| WO 2009000373 A1, 31.12.2008. | |||

