Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу и устройству для обнаружения линии рамки места для парковки.
Уровень техники
[0002] Известно устройство для обнаружения краев линии разметки места для парковки. В этом устройстве, когда первый пиксел, яркостная разность которого со смежным пикселом составляет пороговое значение или больше, существует, и второй пиксел яркостная разность которого со смежным пикселом составляет пороговое значение или больше, существует в позиции, отстоящей от первого пиксела на расстояние, соответствующее ширине линии разметки, первый пиксел или второй пиксел используется как представляющий край линии разметки (см., например, патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2011-191884A
Сущность изобретения
Задачи, решаемые изобретением
[0004] Когда края линии разметки обнаруживаются на основе изображения, захваченного посредством устройства захвата изображений, предоставленного в рассматриваемом транспортном средстве, чем дальше от рассматриваемого транспортного средства находится позиция, которая должна обнаруживаться, тем ниже разрешение линии разметки места для парковки. Таким образом, проблема состоит в том, что точность обнаружения линии разметки является плохой.
[0005] Задача, которая должна решаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ и устройство для обнаружения линии рамки места для парковки, с помощью которых точность обнаружения линии рамки места для парковки может обеспечиваться независимо от разрешения захваченного изображения.
Средство решения задач
[0006] В настоящем изобретении, когда значение параметра, используемого для обнаружения линии рамки, попадает в первый диапазон пороговых значений, линия рамки обнаруживается, и позиция необнаруженной линии рамки оценивается на основе позиции обнаруженной линии рамки. Настоящее изобретение разрешает вышеуказанную проблему посредством задания диапазона пороговых значений для значения параметра, который используется для обнаружения линии рамки в оцененной позиции линии рамки, равным второму диапазону пороговых значений, более широкому, чем первый диапазон пороговых значений.
Преимущества изобретения
[0007] Согласно настоящему изобретению, диапазон пороговых значений для значения параметра, который используется для обнаружения линии рамки, задается в соответствии с расстоянием от рассматриваемого транспортного средства, и в силу этого может получаться такое преимущество, что вероятность того, что линия рамки места для парковки может обнаруживаться, увеличивается.
Краткое описание чертежей
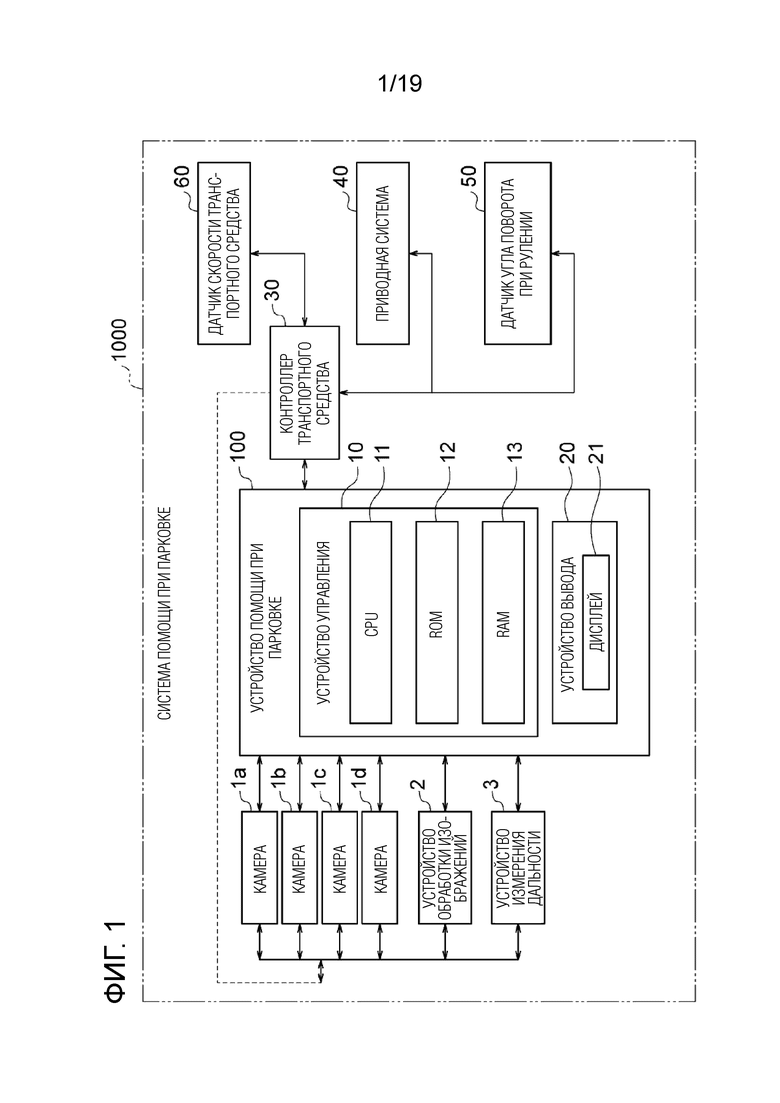
[0008] Фиг. 1 является блок-схемой, иллюстрирующей пример системы помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
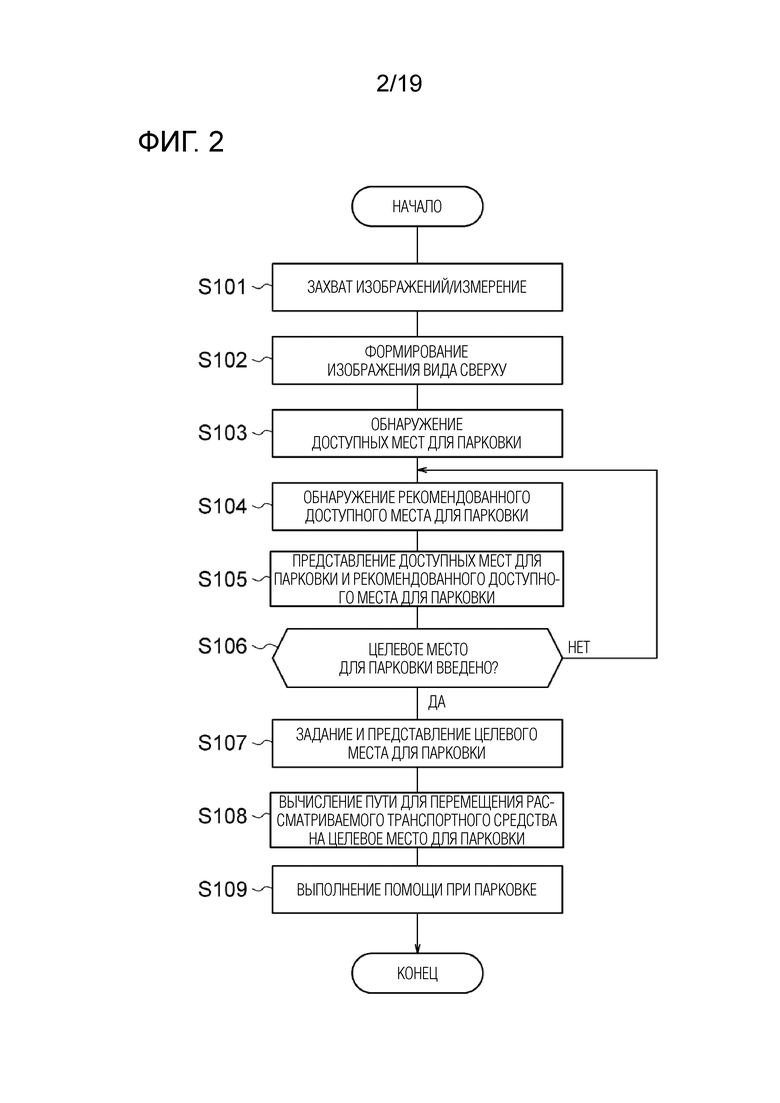
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей пример процедуры управления в системе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
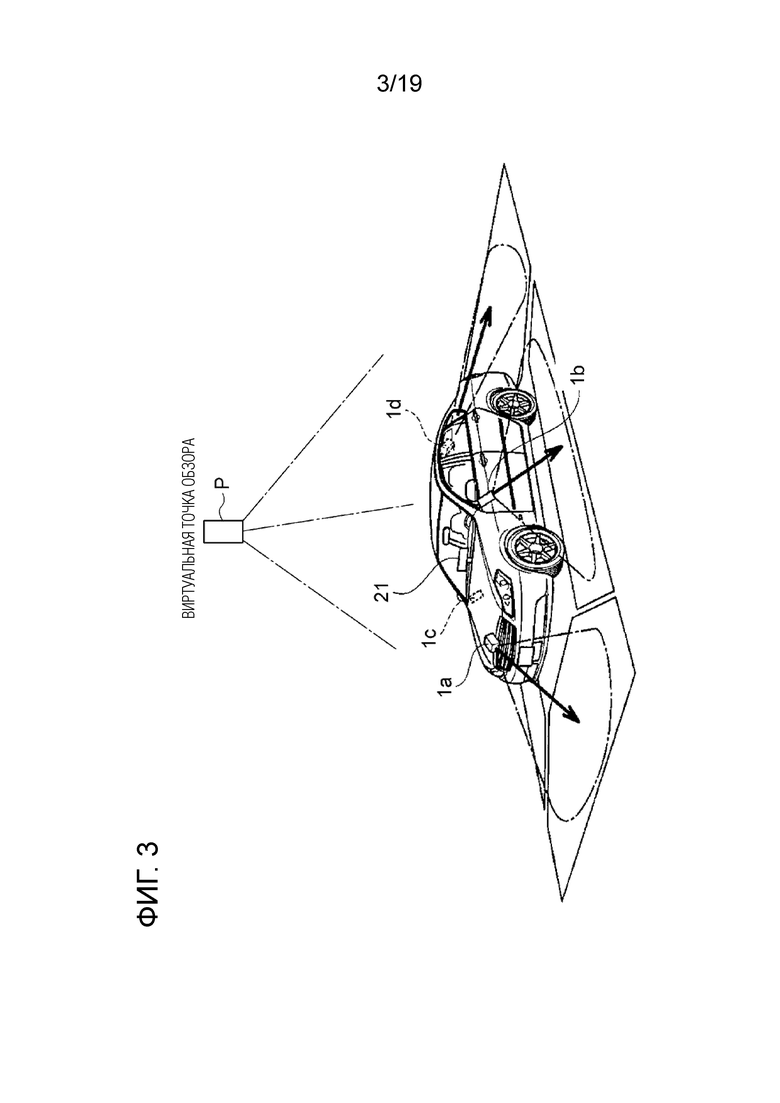
Фиг. 3 является видом, иллюстрирующим пример позиций, в которых размещаются бортовые камеры согласно одному или более вариантов осуществления настоящего изобретения.
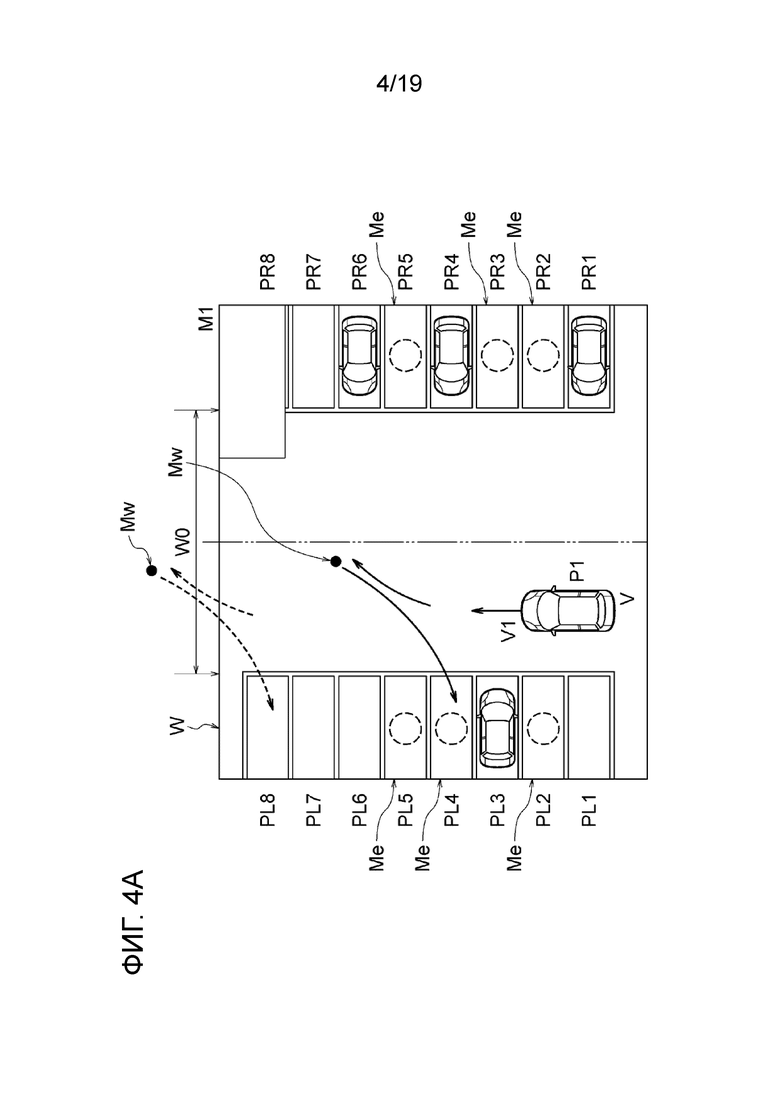
Фиг. 4A является первым видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
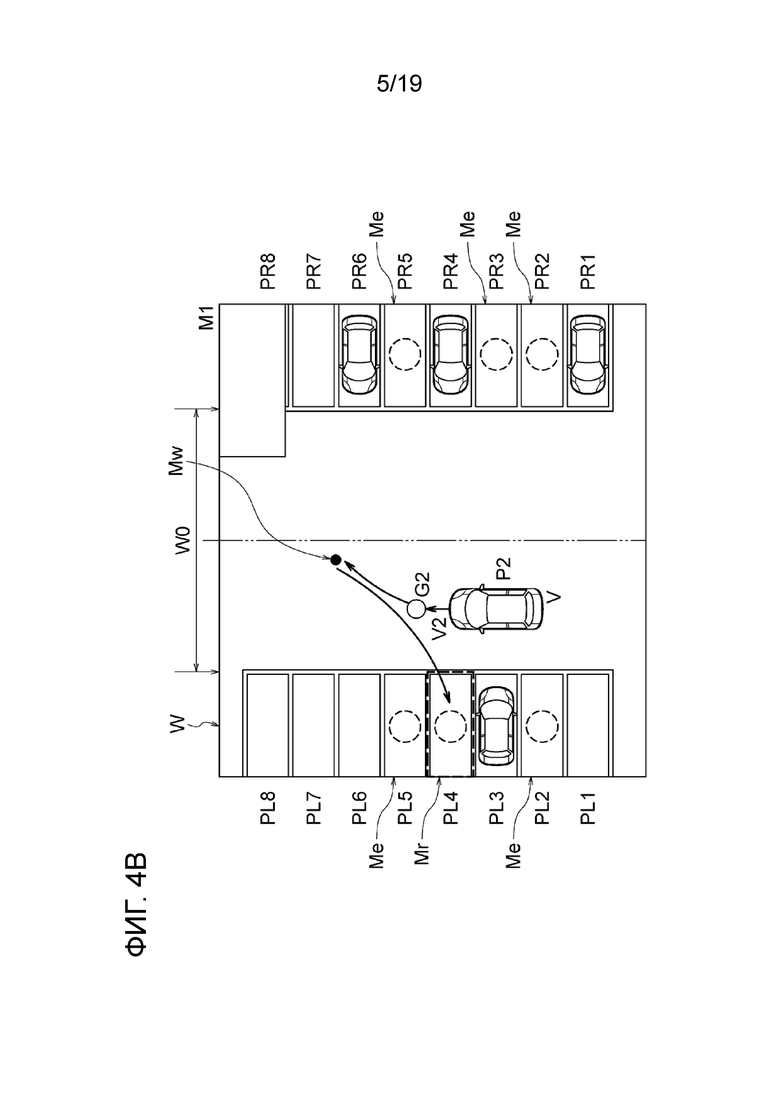
Фиг. 4B является вторым видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
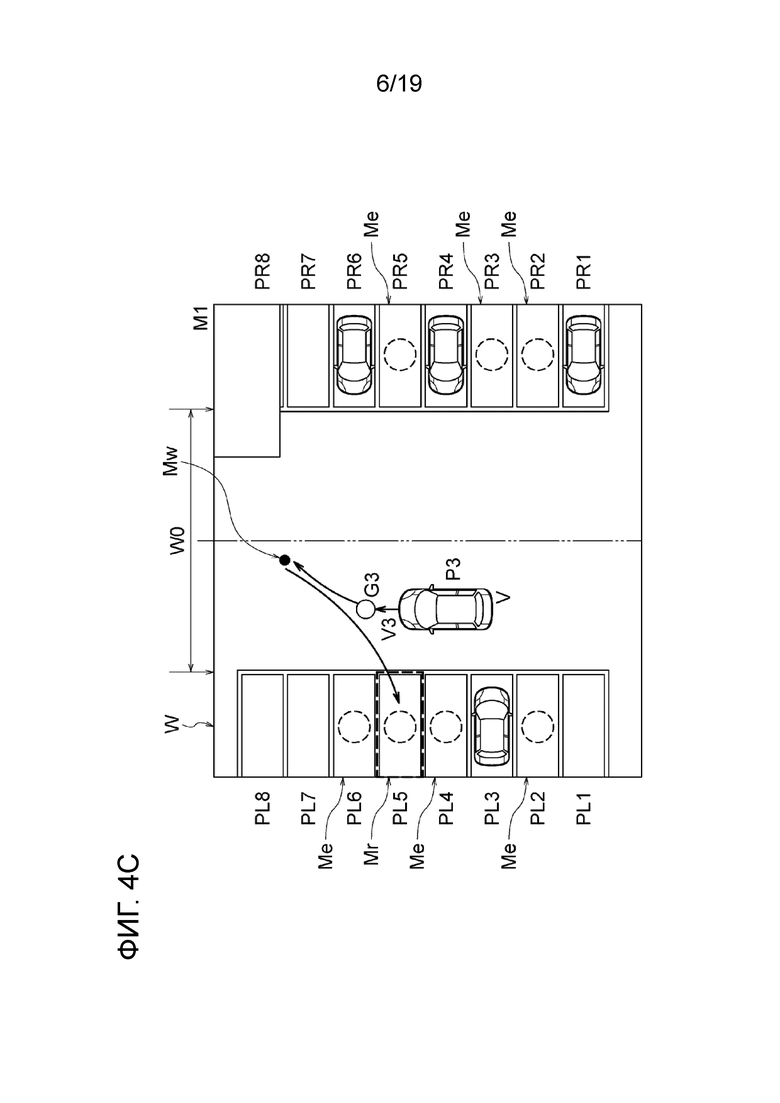
Фиг. 4C является третьим видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
Фиг. 4D является четвертым видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
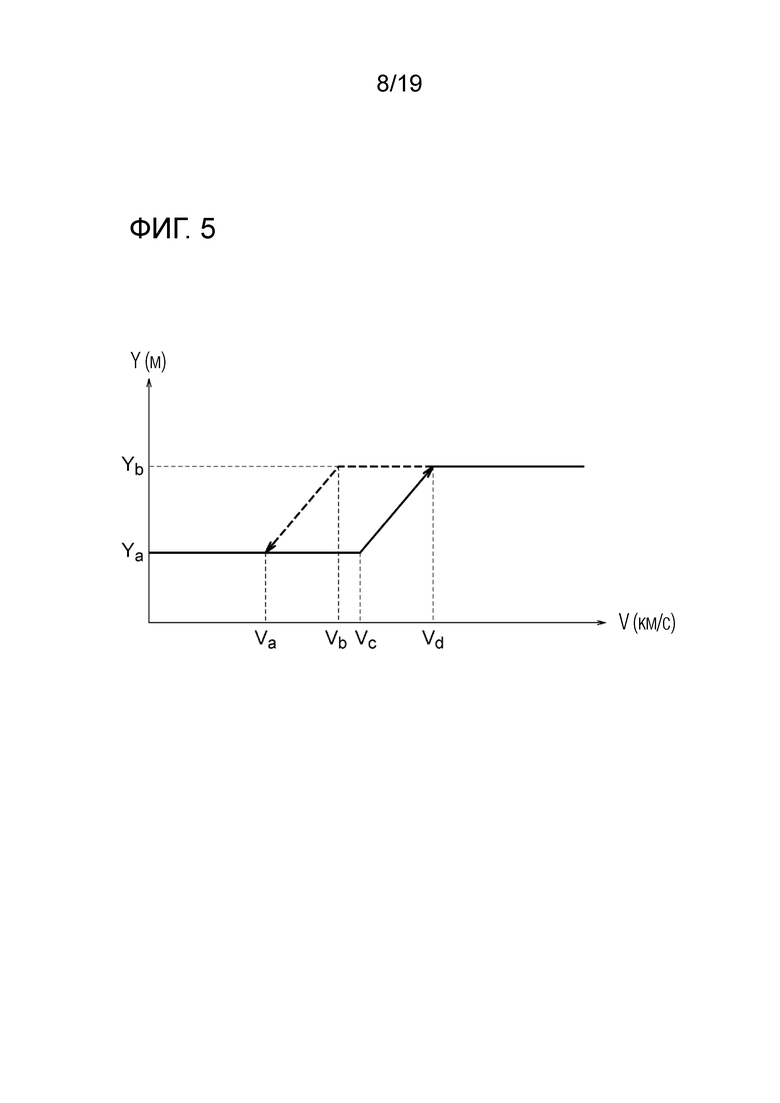
Фиг. 5 является графиком, иллюстрирующим взаимосвязь между скоростью транспортного средства (V [км/с]) и расстоянием до точки взгляда (Y (м)).
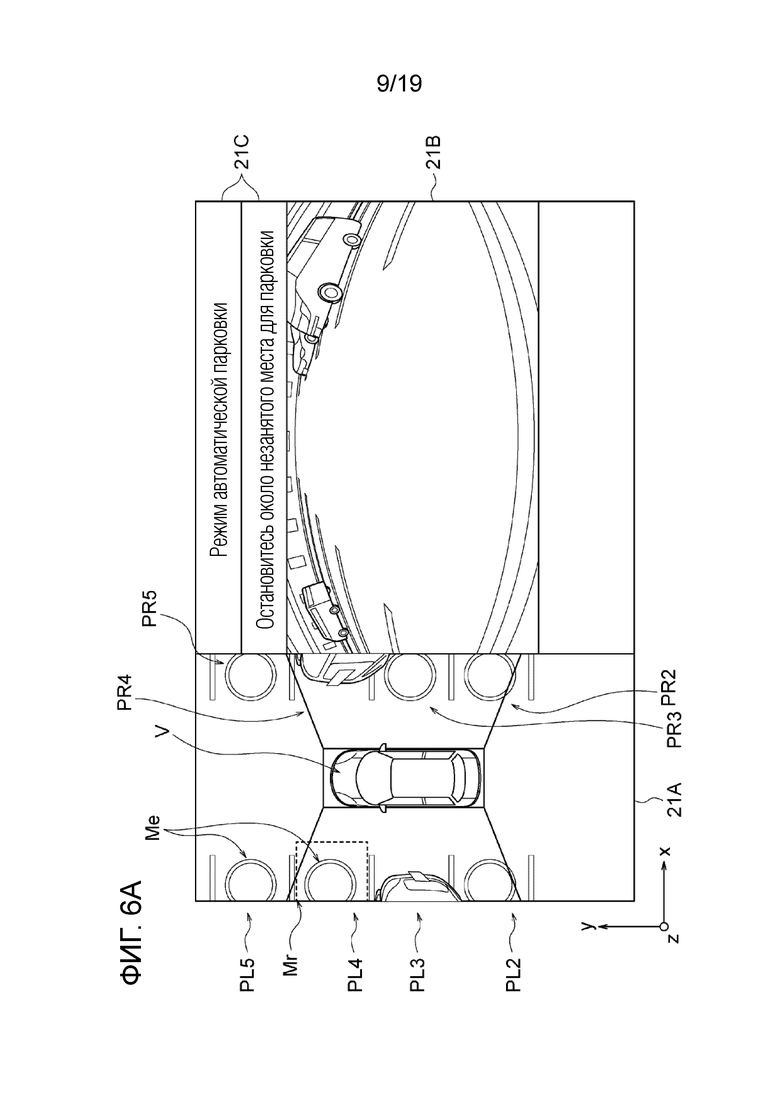
Фиг. 6A является первым видом для описания примера экрана отображения в процессе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
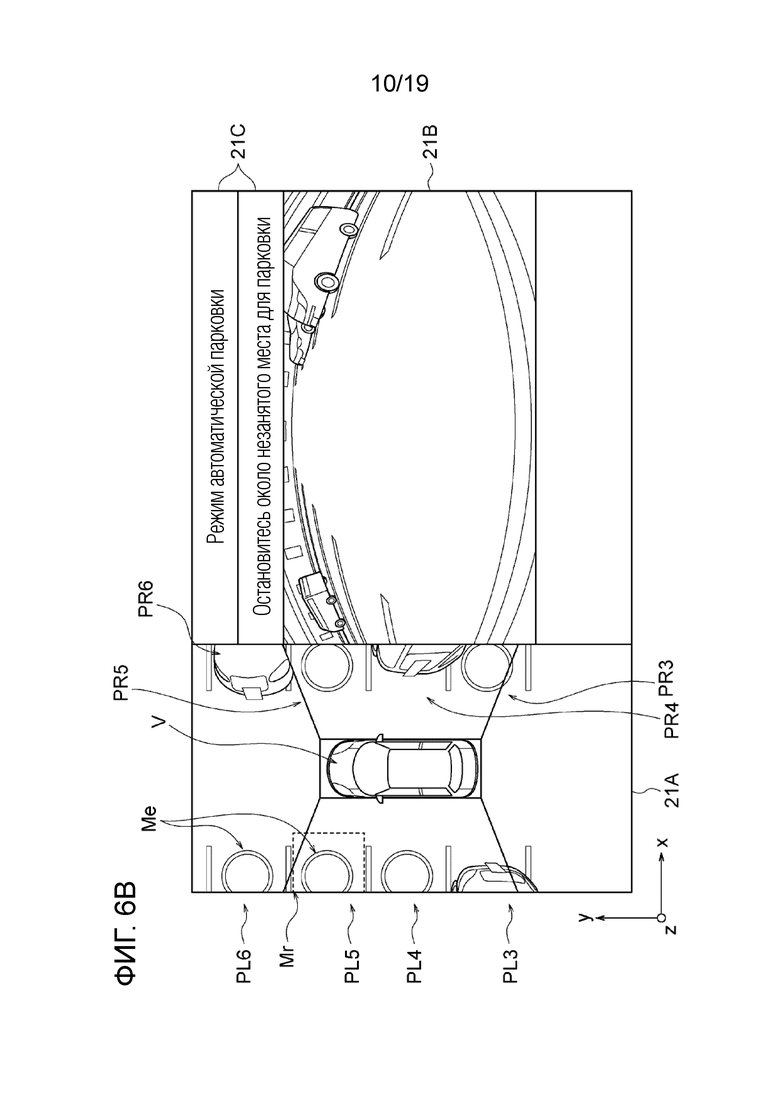
Фиг. 6B является вторым видом для описания примера экрана отображения в процессе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
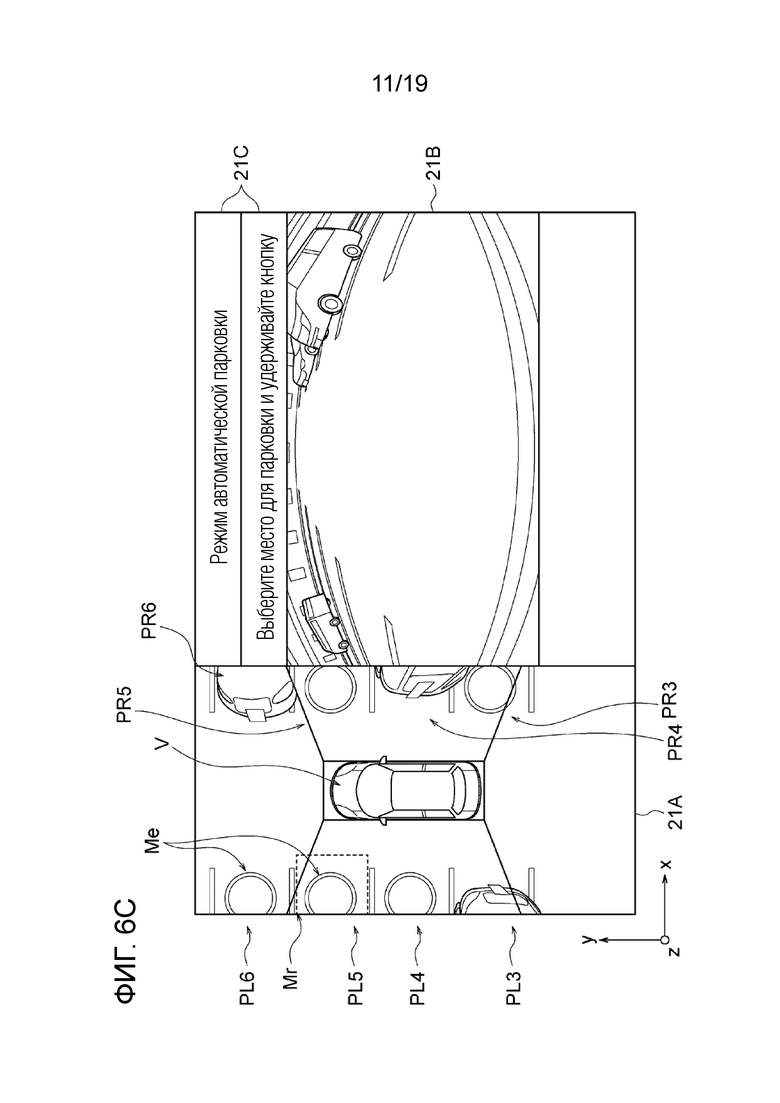
Фиг. 6C является третьим видом для описания примера экрана отображения в процессе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
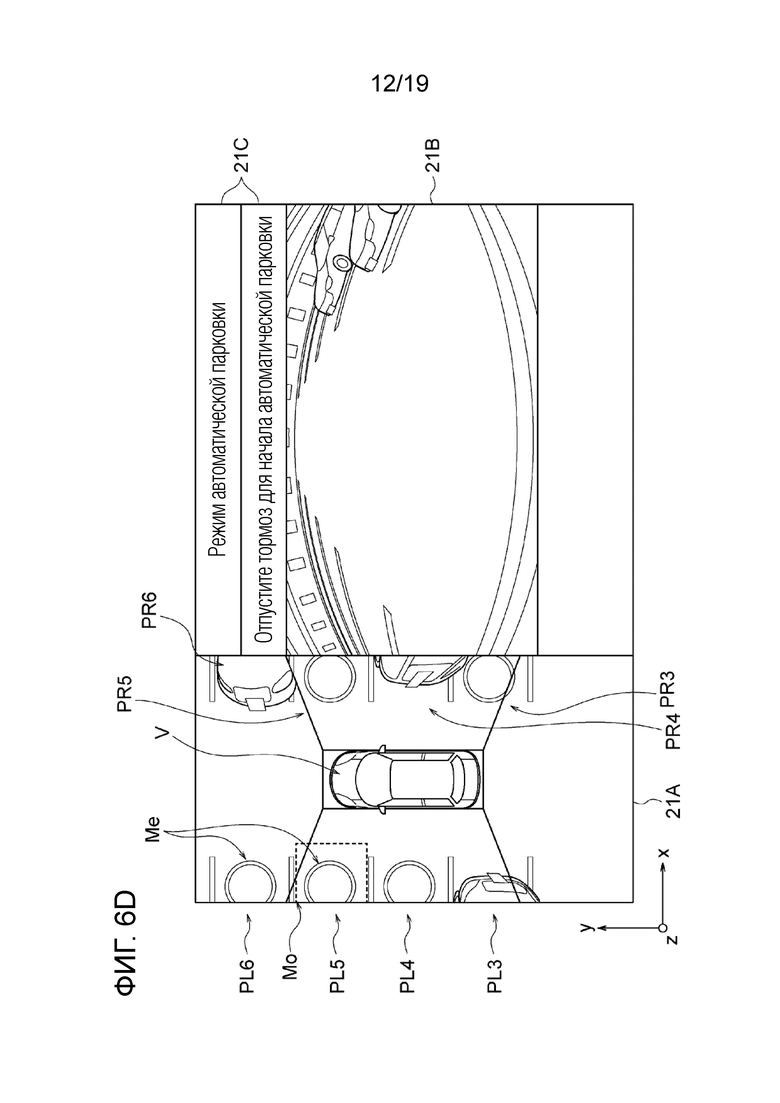
Фиг. 6D является четвертым видом для описания примера экрана отображения в процессе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
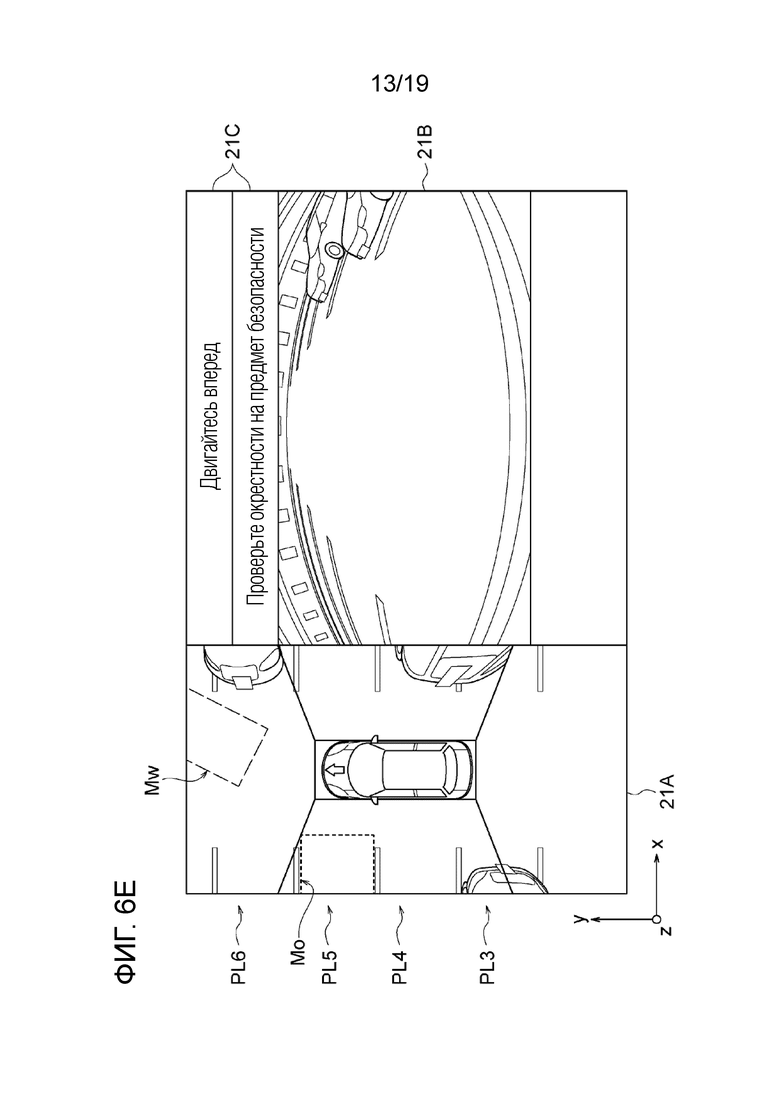
Фиг. 6E является видом для описания примера экрана отображения в процессе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
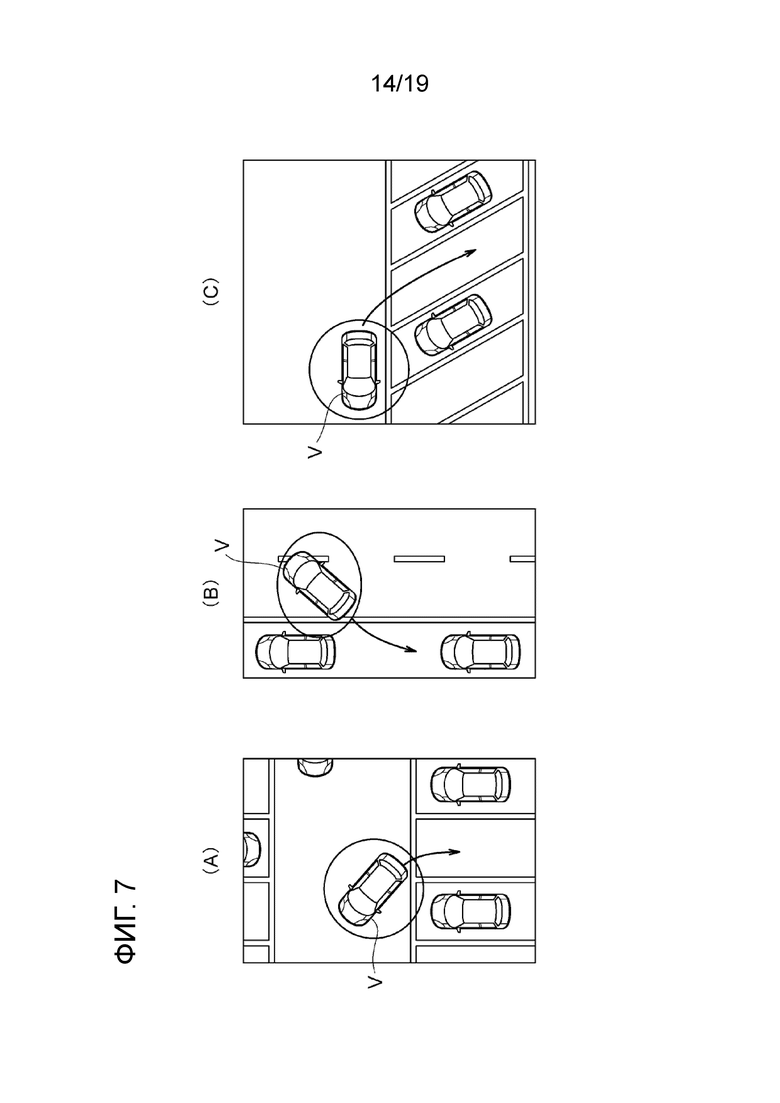
Фиг. 7 является набором видов, иллюстрирующих примеры шаблонов (A), (B) и (C) парковки, к которым применяется процесс помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
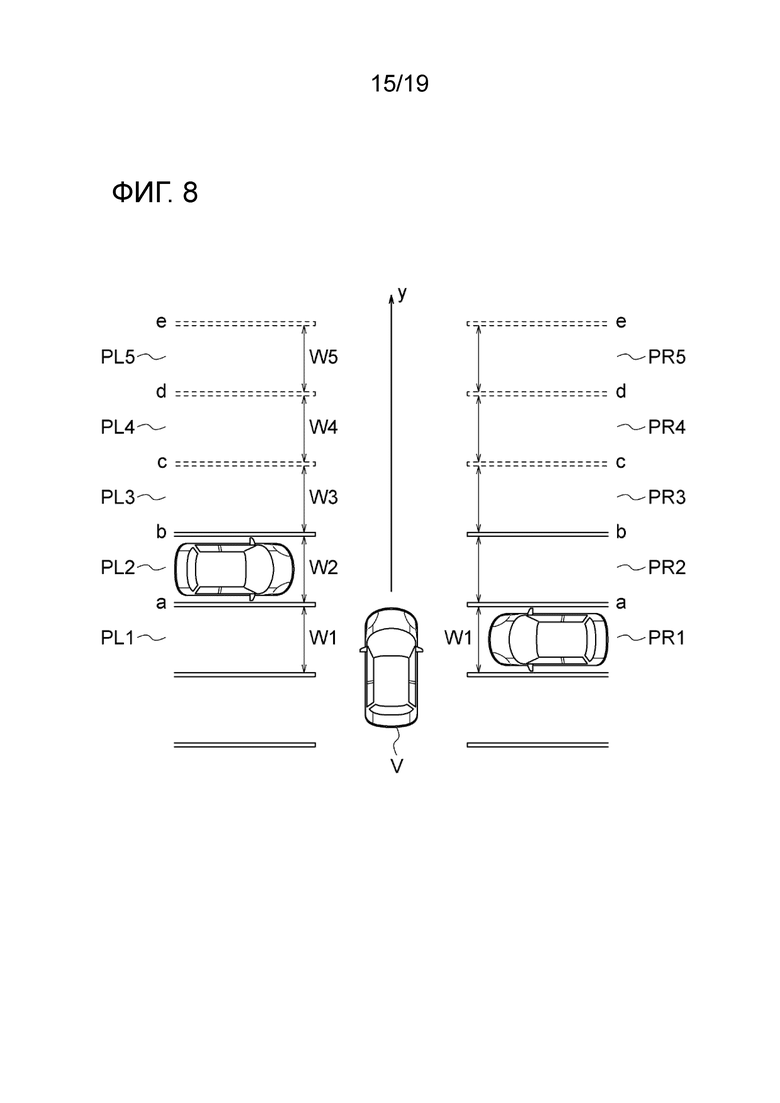
Фиг. 8 является видом, иллюстрирующим пример изображения вида сверху в устройстве помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
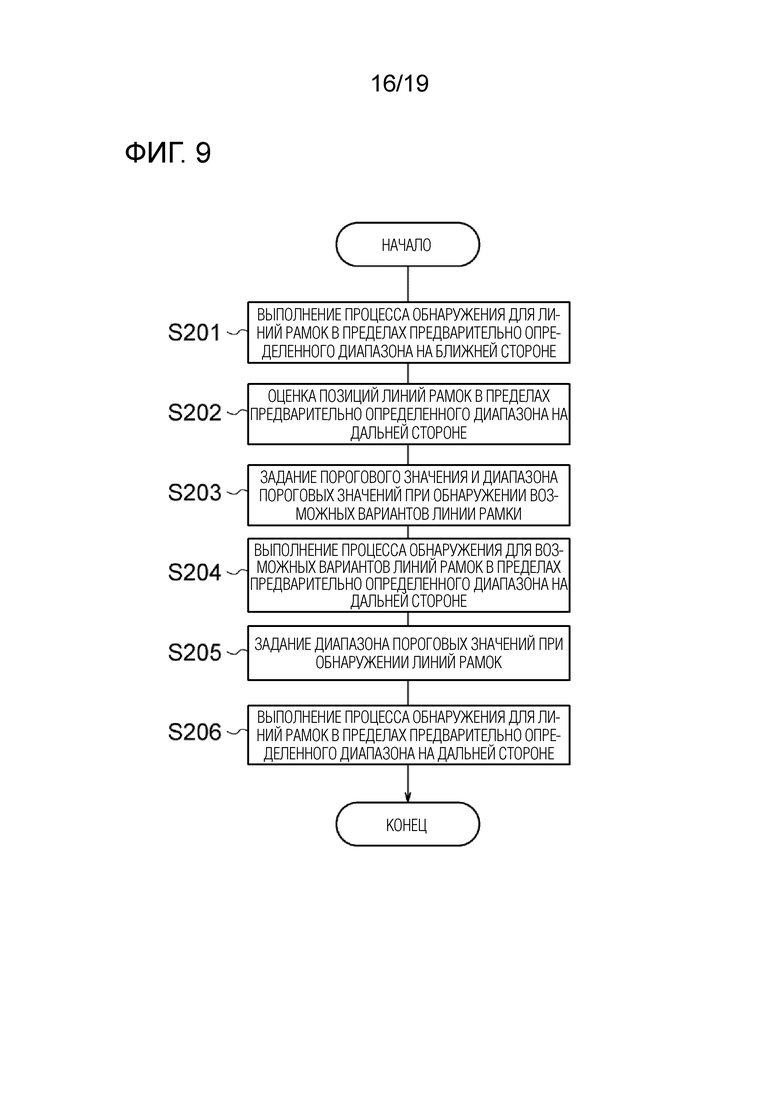
Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей процедуру процесса обнаружения линий рамок для мест для парковки, выполняемого посредством устройства управления устройства помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
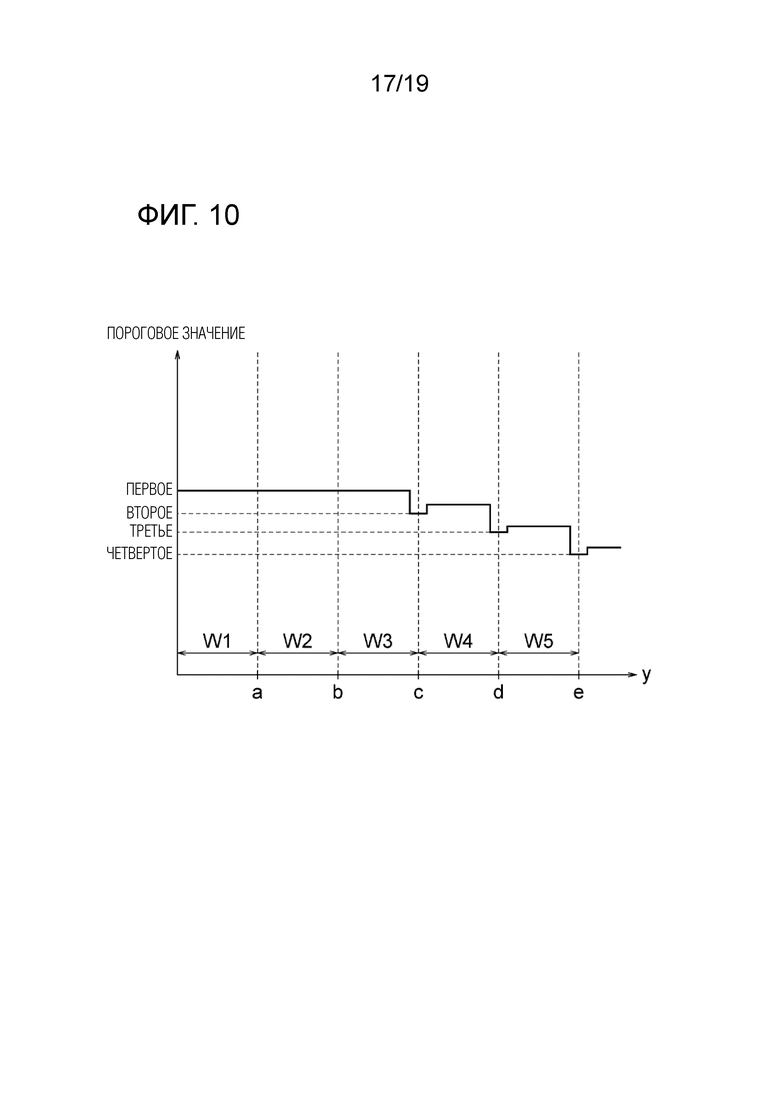
Фиг. 10 является диаграммой, иллюстрирующей взаимосвязь между позицией в направлении движения транспортного средства и пороговым значением, используемым для обнаружения возможных вариантов линий рамок.
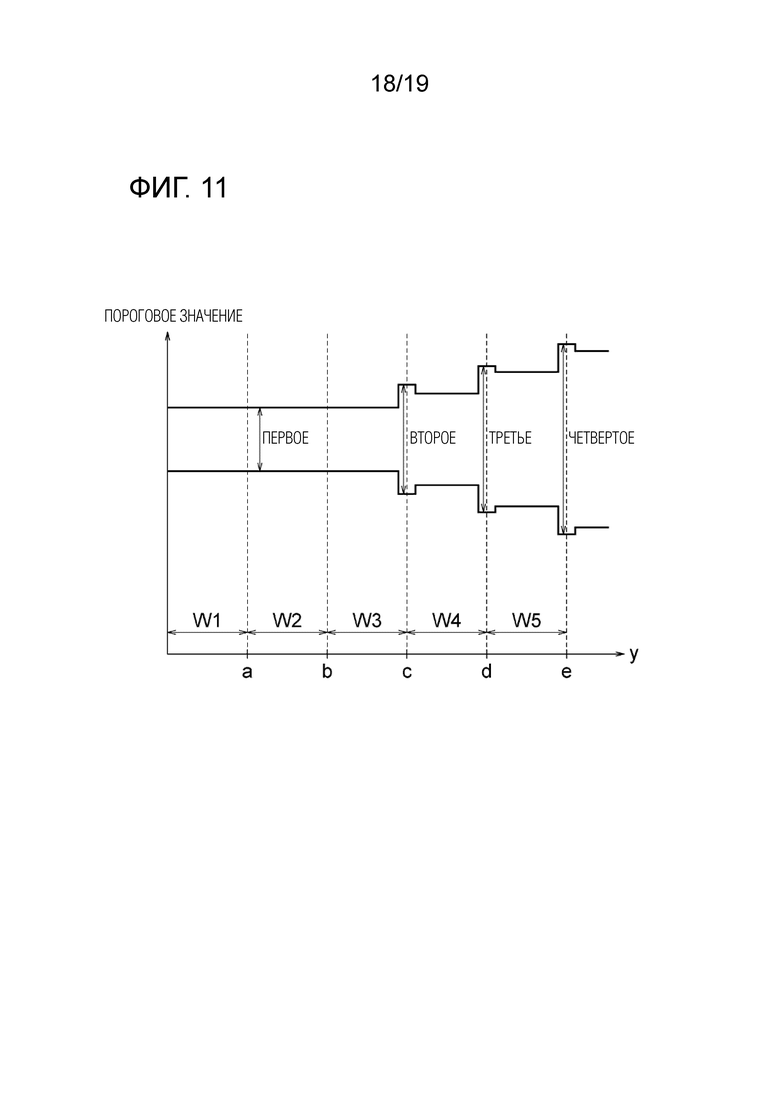
Фиг. 11 является диаграммой, иллюстрирующей взаимосвязь между позицией в направлении движения транспортного средства и пороговым значением, используемым для обнаружения возможных вариантов линий рамок.
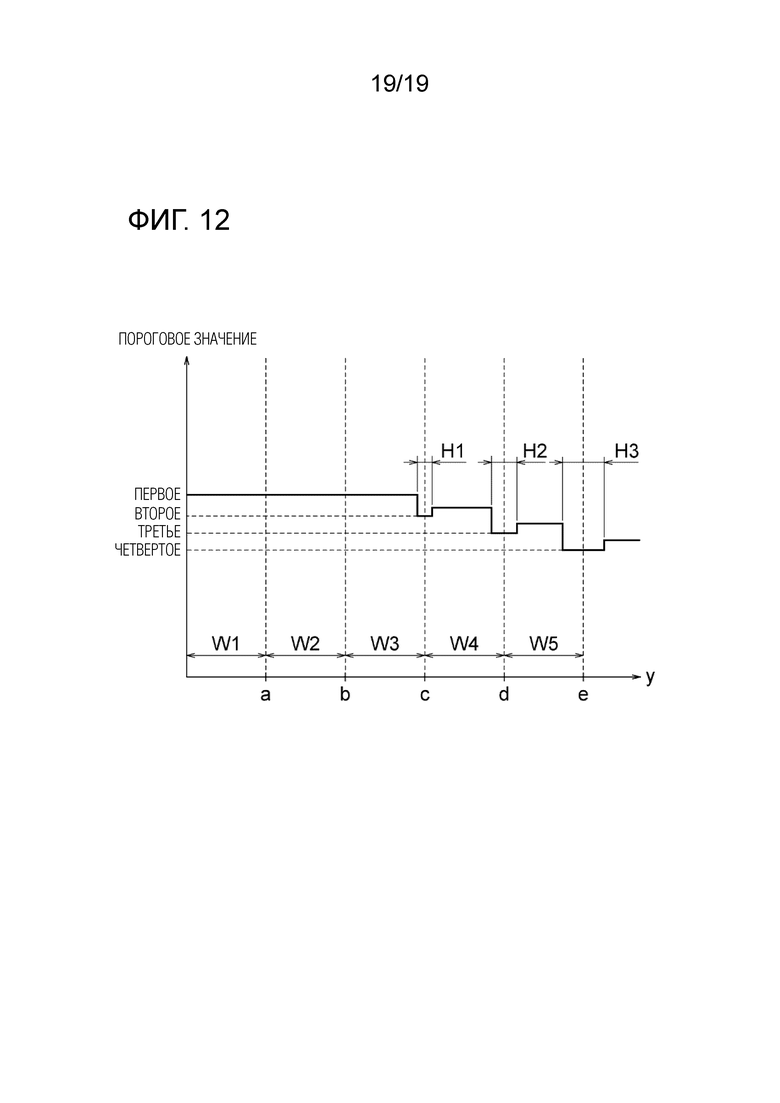
Фиг. 12 является диаграммой, иллюстрирующей взаимосвязь между позицией в направлении движения транспортного средства и пороговым значением, используемым для обнаружения возможных вариантов линий рамок.
Режим(ы) осуществления изобретения
[0009] Фиг. 1 является блок-схемой системы 1000 помощи при парковке, имеющей устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Система 1000 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения помогает при операции перемещения (парковки) рассматриваемого транспортного средства на месте для парковки. Система 1000 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения включает в себя камеры 1a-1d, устройство 2 обработки изображений, устройство 3 измерения дальности, устройство 100 помощи при парковке, контроллер 30 транспортного средства, приводную систему 40, датчик 50 угла поворота при рулении и датчик 60 скорости транспортного средства. Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения включает в себя устройство 10 управления и устройство 20 вывода. Устройство 20 вывода включает в себя дисплей 21, динамик 22 и лампу 23. Эти компоненты соединяются друг с другом через контроллерную сеть (CAN) или другую бортовую LAN, чтобы взаимно обмениваться информацией.
[0010] Устройство 10 управления устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения представляет собой конкретный компьютер, содержащий ROM 12, которое сохраняет программу помощи при парковке, CPU в качестве функциональной схемы, которая выполняет программу, сохраненную в ROM 12, так что он служит в качестве устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, и RAM 13, которое служит в качестве доступного устройства хранения данных.
[0011] Программа помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения представляет собой программу для выполнения процедуры управления представления мест для парковки, на которых возможна парковка, на дисплее 21 и помощи при операции парковки рассматриваемого транспортного средства на месте для парковки, заданном пользователем в качестве целевого места для парковки. Программа помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения может применяться к автоматизированной парковке, при которой руление, акселератор и тормоз работают с возможностью автоматически парковать транспортное средство, и также может применяться к полуавтоматизированной парковке, при которой, по меньшей мере, одна операция из руления, нажатия педали акселератора и тормоза выполняется вручную, а другие операции выполняются автоматически для парковки. Помимо этого или альтернативно, программа помощи при парковке может применяться к функции, с помощью которой представляется намеченный путь движения на место для парковки, и помощь при парковке осуществляется посредством навигации на основе инструкций на место для парковки.
[0012] Устройство 10 управления устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения имеет функции выполнения процесса получения информации, процесса обнаружения доступных мест для парковки, процесса обнаружения рекомендованных доступных мест для парковки и процесса управления отображением. Каждый из вышеуказанных процессов выполняется посредством взаимодействия программного обеспечения для реализации процесса и вышеописанных аппаратных средств.
[0013] Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процедуру управления процесса помощи при парковке, выполняемого посредством системы 1000 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Триггер для начала процесса помощи при парковке не ограничен конкретным образом, и процесс помощи при парковке может быть инициирован посредством операции пускового переключателя устройства 100 помощи при парковке.
[0014] Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения имеет функцию для автоматического перемещения рассматриваемого транспортного средства на место для парковки. В этом процессе, один или более вариантов осуществления настоящего изобретения используют переключатель, который работает только при включении, к примеру, переключатель с автоблокировкой. В устройстве 100 помощи при парковке, автоматизированное вождение рассматриваемого транспортного средства выполняется, когда переключатель с автоблокировкой нажимается, и автоматизированное вождение рассматриваемого транспортного средства приостанавливается, когда нажатие переключателя с автоблокировкой прекращается.
[0015] В частности, на этапе S101, устройство 10 управления устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения получает изображения, захваченные посредством камер 1a-1d, присоединенных к нескольким сегментам рассматриваемого транспортного средства. Камеры 1a-1d захватывают изображения граничных линий мест для парковки вокруг рассматриваемого транспортного средства и объектов, присутствующих вокруг мест для парковки. Камеры 1a-1d могут представлять собой CCD-камеры, камеры для съемки в инфракрасном диапазоне или другие соответствующие устройства формирования изображений. Устройство 3 измерения дальности может предоставляться в позиции, идентичной позиции любой из камер 1a-1d, или также может предоставляться в другой позиции. Устройство 3 измерения дальности может представлять собой радарное устройство, такое как радар миллиметрового диапазона, лазерный радар и ультразвуковой радар или сонар. Устройство 3 измерения дальности обнаруживает присутствие или отсутствие объектов, позиции объектов и расстояния до объектов на основе принимаемого сигнала радарного устройства. Такие объекты соответствуют помехам, пешеходам и другим транспортным средствам вокруг транспортного средства. Принимаемый сигнал используется для того, чтобы определять то, представляет собой место для парковки или нет незанятое место (паркуется или нет транспортное средство на месте для парковки). Помехи могут обнаруживаться с использованием стереотехнологии движения посредством камер 1a-1d.
[0016] Фиг. 3 является видом, иллюстрирующим примерную компоновку камер 1a-1d, расположенных на рассматриваемом транспортном средстве. В примере, проиллюстрированном на фиг. 3, камера 1a располагается на части решетки радиатора рассматриваемого транспортного средства, камера 1d располагается около заднего бампера, и камеры 1b и 1c располагаются в нижних частях правого и левого боковых зеркал. Камеры 1a-1d могут представлять собой камеру, имеющую широкоугольную линзу с широким углом обзора.
[0017] На этапе S101, устройство 10 управления также получает сигналы измерения дальности из устройства 3 измерения дальности, которое может представлять собой множество модулей, присоединенных к нескольким сегментам рассматриваемого транспортного средства.
[0018] На этапе S102, устройство 10 управления устройства 100 помощи при парковке управляет устройством 2 обработки изображений таким образом, чтобы формировать изображение вида сверху. Устройство 2 обработки изображений формирует изображение вида сверху на основе полученного множества захваченных изображений. Изображение вида сверху представляет собой изображение, в котором окружающее состояние, включающее в себя рассматриваемое транспортное средство и место для парковки для парковки рассматриваемого транспортного средства, просматривается из виртуальной точки обзора P (см. фиг. 3) выше рассматриваемого транспортного средства. Обработка изображений, выполняемая посредством устройства 2 обработки изображений, может проводиться, например, с использованием способа, раскрытого в работе "Development of Around View System, Proceedings of Society of JSAE Annual Congress, 116-07 (октябрь 2007 года), стр. 17-22, SUZUKI Masayasu, CHINOMI Satoshi, TAKANO Teruhisa". Примеры сформированного изображения вида сверху 21A проиллюстрированы на фиг. 6A-6E, которые описываются ниже. Эти чертежи иллюстрируют пример отображения, который одновременно отображает изображение вида сверху 21A (вид сверху) вокруг рассматриваемого транспортного средства и изображение 21B для мониторинга (нормальный вид) вокруг рассматриваемого транспортного средства.
[0019] Снова ссылаясь на фиг. 2, на этапе S103, обнаруживаются доступные места Me для парковки. Доступные места Me для парковки представляют собой места для парковки, на которых может парковаться рассматриваемое транспортное средство. Устройство 10 управления обнаруживает доступные места Me для парковки на основе изображений, захваченных посредством камер 1a-1d, и/или сигналов измерения дальности из устройства 3 измерения дальности. В вышеприведенном описании, доступные места Me для парковки обнаруживаются из изображений, захваченных посредством бортовых камер, но настоящее изобретение не ограничено этим, и необходимая информация может получаться из внешнего сервера, чтобы указывать доступные места для парковки.
[0020] Ниже описывается способ обнаружения доступных мест Me для парковки. Устройство 10 управления определяет то, движется или нет рассматриваемое транспортное средство в зоне, которая включает в себя места для парковки (такая зона в дальнейшем также упоминается как "зона парковки"), на основе скорости транспортного средства, позиционной информации навигационной системы и т.д. Например, когда скорость транспортного средства для рассматриваемого транспортного средства составляет предварительно определенное пороговое значение скорости транспортного средства или меньше, и это состояние продолжается в течение предварительно определенного времени или больше, устройство 10 управления определяет то, что рассматриваемое транспортное средство движется в зоне парковки. Помимо этого или альтернативно, устройство 10 управления указывает, например, места для парковки шоссе и т.п. из позиционной информации навигационной системы, чтобы за счет этого определять то, что рассматриваемое транспортное средство движется в зоне парковки. В одном или более вариантов осуществления настоящего изобретения, может выполняться определение в отношении того, представляет собой обнаруженная зона или нет зону, включающую в себя места для парковки, через связь с внешней средой относительно транспортного средства, к примеру, через так называемую связь между транспортным средством и дорожной инфраструктурой и связь между транспортными средствами.
[0021] Когда выполняется определение в отношении того, что рассматриваемое транспортное средство движется в зоне парковки, устройство 10 управления обнаруживает линии рамок на основе изображения вида сверху, сформированного посредством устройства 2 обработки изображений. Линии рамок представляют собой граничные линии, которые задают рамки (области) мест для парковки. Устройство 10 управления выполняет обнаружение краев для захваченных изображений. При обнаружении краев, устройство 10 управления обнаруживает пиксельную матрицу, в которой яркостная разность между каждым пикселом и его смежным пикселом составляет предварительно определенное значение или более, из изображения вида сверху. После этого, когда длина обнаруженной пиксельной матрицы составляет предварительно определенное пороговое значение или больше, устройство 10 управления обнаруживает линию, край которой задается посредством пиксельной матрицы, в качестве линии рамки. Устройство 10 управления также обнаруживает то, имеется или нет линия, которая имеет более высокую вероятность того, что она представляет собой линию рамки, чем обнаруженная линия рамки, вокруг участка, обнаруженного в качестве линии рамки. Например, когда линия, имеющая большую яркостную разность, заново обнаруживается, новая обнаруженная линия обнаруживается в качестве линии, имеющей более высокую вероятность того, что она представляет собой линию рамки. В одном или более вариантов осуществления настоящего изобретения, цвет линий рамок представляет собой белый цвет, но настоящее изобретение не ограничено этим, и также могут использоваться другие цвета, к примеру, красный цвет.
[0022] ROM 12 устройства 10 управления предварительно сохраняет информацию относительно шаблонов парковочных рамок. Примеры шаблонов парковочных рамок включают в себя шаблоны на схеме парковки под прямым углом, как проиллюстрировано в части (A) по фиг. 7, которая описывается ниже, шаблоны на параллельной парковке, как проиллюстрировано в части (B) по фиг. 7, которая описывается ниже, и шаблоны на схеме парковки под углом, как проиллюстрировано в части (C) по фиг. 7, которая описывается ниже.
[0023] Когда возможный вариант линии рамки, обнаруженной из изображения вида сверху, удовлетворяет следующим трем условиям, устройство 10 управления обнаруживает возможный вариант линии рамки в качестве линии рамки и обнаруживает пространство, заданное посредством линии рамки, в качестве места для парковки. Первое условие состоит в том, что расстояние от возможного варианта другой линии рамки или обнаруженной линии рамки попадает в предварительно определенный диапазон пороговых значений (например, фактическое расстояние 2-2,5 (м)). Второе условие состоит в том, что относительный угол с возможным вариантом другой линии рамки или обнаруженной линии рамки попадает в предварительно определенный диапазон пороговых значений (например, от -10° до +10°). Третье условие состоит в том, что линии, извлеченные в качестве возможных вариантов линий парковочных рамок, не включают в себя линию, имеющую длину, равную или меньшую первого порогового значения длины линии, которое предварительно задается (например, длину, соответствующую фактическому расстоянию 15 (м)). В вышеприведенном описании, когда три условия удовлетворяются, линия дорожной разметки обнаруживается, но настоящее изобретение не ограничено этим. В альтернативном варианте осуществления, когда любая комбинация условий удовлетворяется, либо когда, по меньшей мере, одно условие удовлетворяется, линия дорожной разметки может обнаруживаться.
[0024] Когда места для парковки, которые удовлетворяют вышеприведенным трем условиям, указываются, устройство 10 управления определяет то, присутствуют или нет помехи в указанных местах для парковки, с использованием обнаруживаемых данных из устройства 3 измерения дальности. Помимо этого, устройство 10 управления определяет то, представляют собой указанные места для парковки или нет места для парковки, на которых возможна парковка посредством автоматизированного вождения, на основе намеченного пути движения при автоматизированном вождении. Например, места для парковки, для которых не может обеспечиваться намеченный путь движения при автоматизированном вождении, к примеру, места для парковки, обращенные к стене, не соответствуют местам для парковки, на которых возможна парковка посредством автоматизированного вождения. Затем устройство 10 управления задает места для парковки из указанных мест для парковки, на которых помехи не присутствуют, и на которых возможна парковка посредством автоматизированного вождения, в качестве доступных мест Me для парковки. Таким образом, устройство 10 управления обнаруживает доступные места Me для парковки. В вышеприведенном описании, места для парковки, линии парковочной рамки которых обнаруживаются, обнаруживаются в качестве доступных мест Me для парковки, но в одном или более вариантов осуществления настоящего изобретения, схема обнаружения не ограничена вышеуказанным. Помимо этого, или альтернативно, даже если линии парковочных рамок не могут обнаруживаться, места для парковки, удовлетворяющие предварительно определенному условию, могут обнаруживаться в качестве доступных мест Me для парковки, к примеру, когда незанятые места, имеющие определенную область, обнаруживаются, и когда места для парковки использованы для парковки в предыдущие разы.
[0025] Фиг. 4A является первым видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. На фиг. 4A, стрелки представляют намеченный путь движения, когда транспортное средство паркуется посредством автоматизированного вождения. Пунктирные круги представляют доступные места Me для парковки, обнаруженные в позиции P1. В зоне парковки, проиллюстрированной на фиг. 4A, помеха M1 присутствует на месте PR8 для парковки, и устройство 10 управления в силу этого не указывает место PR8 для парковки в качестве доступного места Me для парковки. Относительно места PL8 для парковки, намеченный путь движения не может обеспечиваться при автоматизированном вождении, поскольку стена W создает помехи намеченному пути движения (соответствующему пунктирным стрелкам на фиг. 4A), и место PL8 для парковки в силу этого не представляет собой место для парковки, подходящее для автоматизированного вождения. Соответственно, устройство 10 управления не указывает место PL8 для парковки в качестве доступного места Me для парковки. Припаркованные транспортные средства присутствуют в местах PR1, PR4, PR6 и PL3 для парковки, и устройство 10 управления в силу этого не указывает их в качестве доступных мест Me для парковки. Устройство 10 управления указывает места PL1, PL2, PL4-PL7, PR2, PR3, PR5 и PR7 для парковки в качестве доступных мест Me для парковки.
[0026] Как проиллюстрировано на фиг. 4A, позиция движения рассматриваемого транспортного средства представляет собой P1, и скорость транспортного средства представляет собой V1. Устройство 10 управления задает диапазон, который включает в себя места PL2-PL5 и PR2-PR5 для парковки, из мест для парковки, включенных в изображения, захваченные в позиции P1 рассматриваемого транспортного средства V, в качестве диапазона обнаружения для доступных мест Me для парковки. Диапазон обнаружения для доступных мест Me для парковки во время движения транспортного средства не ограничен диапазоном мест PL2-PL5 и PR2-PR5 для парковки и также может представлять собой, например, диапазон мест PL1-PL8 и PR1-PR8 для парковки. На фиг. 4A и на фиг. 4B-4D, которые описываются ниже, перемещение рассматриваемого транспортного средства V представляется во временной последовательности, и позиция рассматриваемого транспортного средства V перемещается в порядке фиг. 4A, фиг. 4B, фиг. 4C и фиг. 4D. Состояние рассматриваемого транспортного средства V, проиллюстрированное на фиг. 4E, который описывается ниже, не включено во временную последовательность, выражаемую на фиг. 4A-4D.
[0027] Снова ссылаясь на фиг. 2, на этапе S104, рекомендованное доступное место Mr для парковки обнаруживается. Рекомендованное доступное место Mr для парковки представляет собой доступное место для парковки, подходящее для парковки рассматриваемого транспортного средства. Устройство 10 управления обнаруживает рекомендованное доступное место Mr для парковки в соответствии с состоянием движения рассматриваемого транспортного средства из обнаруженного множества доступных мест для парковки.
[0028] Ниже описывается способ обнаружения рекомендованного доступного места Mr для парковки. Устройство 10 управления вычисляет намеченный путь движения при парковке на каждом из доступных мест Me для парковки. Намеченный путь движения, который должен вычисляться, представляет собой намеченный путь из начальной позиции автоматизированного вождения в позицию доступного места Me для парковки. Устройство 10 управления указывает начальную позицию автоматизированного вождения для каждого из доступных мест Me для парковки. Устройство 10 управления задает намеченный путь движения при автоматизированном вождении для начальной позиции автоматизированного вождения. Намеченный путь движения при автоматизированном вождении не ограничен одним намеченным путем. Устройство 10 управления задает соответствующий намеченный путь движения в соответствии с окружающими ситуациями при выполнении автоматизированного вождения. Намеченный путь, который должен вычисляться, представляет собой намеченный путь движения, когда рассматриваемое транспортное средство перемещается по намеченному пути движения из начальной позиции автоматизированного вождения и достигает позиции доступного места Me для парковки (позиции, в которой парковка завершается).
[0029] Намеченный путь движения отличается для каждого доступного места Me для парковки в соответствии с числом поворотов для парковки, проезжаемым расстоянием, максимальным углом поворота при рулении и т.д. В силу этого, когда транспортное средство движется вдоль намеченного пути движения посредством автоматизированного вождения, требуемое время для парковки отличается для каждого доступного места Me для парковки. Например, требуемое время для парковки меньше по мере того, как число поворотов для парковки меньше, по мере того, как расстояние намеченного пути движения меньше, либо по мере того, как максимальный угол поворота при рулении меньше. Как проиллюстрировано на фиг. 4A, при допущении парковки на доступном месте PL6 или PL7 для парковки, расстояние от окрестности места PL7 для парковки до стены Wa меньше расстояния от окрестности места PL6 для парковки до стены W. Число поворотов для парковки при парковке на месте PL7 для парковки в силу этого больше числа поворотов для парковки при парковке на месте PL6 для парковки, и требуемое время для парковки на месте PL7 для парковки превышает требуемое время для парковки на месте PL6 для парковки.
[0030] Устройство 10 управления затем вычисляет расстояние до точки взгляда на основе скорости транспортного средства для рассматриваемого транспортного средства V. Расстояние до точки взгляда соответствует расстоянию от позиции рассматриваемого транспортного средства V до позиции, на которую смотрит водитель рассматриваемого транспортного средства V. Чем выше скорость транспортного средства, тем дальше смотрит водитель. Таким образом, чем выше скорость транспортного средства, тем больше расстояние до точки взгляда. Расстояние до точки взгляда может представлять собой длину прямой линии, направленной вперед относительно рассматриваемого транспортного средства В. Линия, соответствующая расстоянию до точки взгляда, не обязательно должна представлять собой прямую линию, и также может задаваться вдоль кривой. Когда расстояние до точки взгляда задается вдоль кривой, кривизна кривой может быть ассоциирована с углом поворота при рулении.
[0031] Фиг. 5 является графиком, иллюстрирующим взаимосвязь между скоростью транспортного средства (V [км/с]) и расстоянием до точки взгляда (Y (м)). Сплошная линия представляет характеристику, когда скорость транспортного средства увеличивается, тогда как пунктирная линия представляет характеристику, когда скорость транспортного средства уменьшается. Как проиллюстрировано на фиг. 5, когда скорость транспортного средства составляет Va или ниже, расстояние до точки взгляда составляет Ya. Когда скорость транспортного средства увеличивается от Va до Vc, расстояние до точки взгляда поддерживается как Ya. Затем по мере того, как возрастает скорость транспортного средства из состояния Vc, расстояние до точки взгляда увеличивается пропорционально скорости транспортного средства в пределах диапазона Vc или выше и Vd или ниже скорости транспортного средства. Когда скорость транспортного средства составляет Vd или выше, расстояние до точки взгляда поддерживается как Yb. С другой стороны, когда скорость транспортного средства понижается из состояния Vd, расстояние до точки взгляда поддерживается как Yb до тех пор, пока скорость транспортного средства не возвращается к Vb от Vd. Расстояние до точки взгляда уменьшается пропорционально скорости транспортного средства в пределах диапазона Va или выше и Vc или ниже скорости транспортного средства. Таким образом, характеристика, представляющая взаимосвязь между скоростью транспортного средства и расстоянием до точки взгляда, является гистерезисной характеристикой между направлением увеличения и направлением уменьшения скорости транспортного средства.
[0032] ROM 12 устройства 10 управления сохраняет взаимосвязь между скоростью транспортного средства и расстоянием до точки взгляда в качестве карты. При получении информации относительно скорости транспортного средства из датчика 60 скорости транспортного средства, устройство 10 управления обращается к карте, чтобы вычислять расстояние до точки взгляда, соответствующее скорости транспортного средства.
[0033] Фиг. 4B является вторым видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. На фиг. 4B, позиция движения рассматриваемого транспортного средства представляет собой P2, и скорость транспортного средства представляет собой V2. Устройство 10 управления вычисляет расстояние до точки взгляда, соответствующее скорости V2 транспортного средства. Устройство 10 управления задает позицию, отделенную от позиции P2 на расстояние до точки взгляда, в качестве точки G2 взгляда.
[0034] Устройство 10 управления затем назначает номера для идентификации для доступных мест Me для парковки около точки G2 взгляда. Например, номера предоставляются в порядке близости к точке G2 взгляда. Устройство 10 управления вычисляет простоту въезда на каждое доступное место Me для парковки. Индекс простоты въезда на доступное место Me для парковки представляет собой время движения для рассматриваемого транспортного средства V, чтобы парковаться на доступном месте Me для парковки посредством автоматизированного вождения, и соответствует требуемому времени для парковки. Требуемое время для парковки представляет собой время при движении посредством автоматизированного вождения вдоль намеченного пути движения, вычисленное для каждого доступного места Me для парковки. Простота въезда на доступное место Me для парковки в силу этого определяется в соответствии с проезжаемым расстоянием, числом операций (числом поворотов для парковки), максимальным углом поворота при рулении, скоростью транспортного средства и т.д. Индекс простоты въезда на доступное место Me для парковки может включать в себя не только требуемое время для парковки, но также и другие факторы, такие как достоверность парковки при автоматизированном вождении. Устройство 10 управления вычисляет требуемое время для парковки на каждом доступном месте Me для парковки. В примере по фиг. 4B, устройство 10 управления вычисляет требуемое время для парковки на каждом из доступных мест PL2, PL4, PL5, PR2, PR3 и PR5 для парковки.
[0035] Устройство 10 управления сравнивает требуемое время для парковки на каждом доступном месте Me для парковки с предварительно определенным требуемым пороговым значением времени. Требуемое пороговое значение времени является значением, которое предварительно задается, и является верхним пределом требуемого времени при парковке посредством автоматизированного вождения. Когда требуемое время для парковки на доступном месте Me для парковки превышает требуемое пороговое значение времени, устройство 10 управления не указывает доступное место Me для парковки в качестве рекомендованного доступного места Mr для парковки.
[0036] После указания доступных мест Me для парковки, для которых требуемое время для парковки меньше требуемого порогового значения времени, устройство 10 управления задает доступное место Me для парковки, которое является ближайшим к точке взгляда из указанных доступных мест Me для парковки, в качестве рекомендованного доступного места Mr для парковки. В примере по фиг. 4B, требуемое время для парковки на месте PL4 для парковки меньше требуемого порогового значения времени, и место PL4 для парковки находится ближе всего к точке взгляда. Устройство 10 управления в силу этого задает место PL4 для парковки в качестве рекомендованного доступного места Mr для парковки. В одном или более вариантов осуществления настоящего изобретения, доступное место Me для парковки, для которого требуемое время для парковки наименьшим, может обнаруживаться в качестве рекомендованного доступного места для парковки.
[0037] Снова ссылаясь на фиг. 2, на этапе 105, доступные места Me для парковки и рекомендованное доступное место Mr для парковки представляются. Устройство 10 управления управляет дисплеем 21, чтобы отображать заданные доступные места Me для парковки и заданное рекомендованное доступное место Mr для парковки, чтобы за счет этого представлять их водителю и пассажирам.
[0038] Фиг. 6A является первым видом для описания примера экрана отображения в процессе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Экран отображения по фиг. 6A представляет собой экран отображения, когда рассматриваемое транспортное средство V движется в позиции P2 по фиг. 4B. Изображение вида сверху 21A (вид сверху), отображаемый на левой стороне экрана дисплея 21, включает в себя изображение (граничных линий мест для парковки), который указывает места PL2-PL5 и PR2-PR5 для парковки. Центр изображения вида сверху 21A (вид сверху) отображается со значком указания позиции рассматриваемого транспортного средства V для рассматриваемого транспортного средства V. Изображение для мониторинга (нормальный вид) может отображаться в качестве любого из изображений, захваченных посредством различных камер 1a-1d в соответствии с рабочим состоянием рассматриваемого транспортного средства V. Пример, проиллюстрированный на фиг. 6A, отображается в качестве изображения, захваченного посредством камеры 1a, которая располагается на части решетки радиатора рассматриваемого транспортного средства V. Когда рассматриваемое транспортное средство V перемещается назад, изображение для мониторинга может отображаться в качестве изображения, захваченного посредством камеры 1d, которая располагается около заднего бампера. Изображение 21C представляет собой изображение для сообщений.
[0039] Как проиллюстрировано на фиг. 6A, места PL2, PL4, PL5, PR2, PR3 и PR5 для парковки отображаются с помощью кругов, представляющих доступные места Me для парковки, и место PL4 для парковки отображается с помощью точечной рамки, представляющей рекомендованное доступное место Mr для парковки. Места PL3 и PR4 для парковки отображаются с помощью изображения вида сверху части транспортного средства. Водитель и пассажиры рассматриваемого транспортного средства могут подтверждать позиции доступных мест Me для парковки и позицию рекомендованного доступного места Mr для парковки из экрана отображения дисплея 21. Помимо этого, из сообщений, включенных в изображение 21C, водитель и пассажиры могут подтверждать, что режим автоматизированного вождения является эффективным, и транспортное средство должно останавливаться для выполнения автоматизированного вождения.
[0040] Снова ссылаясь на фиг. 2, на этапе S106, выполняется определение в отношении того, вводится или нет целевое место Mo для парковки. Целевое место Mo для парковки представляет собой место для парковки, на котором транспортное средство паркуется посредством автоматизированного вождения, и представляет местоположение в качестве цели при автоматизированном вождении. Целевое место Mo для парковки задается на основе операции водителем или пассажира. Например, когда дисплей 21 представляет собой дисплей с сенсорной панелью, водитель или пассажир касаются участка, представляющего требуемое место для парковки, чтобы за счет этого обозначать целевое место Mo для парковки, и информация относительно целевого места Mo для парковки вводится в устройство 10 управления.
[0041] Когда целевое место Mo для парковки вводится, последовательность операций управления переходит к этапу S107. С другой стороны, когда целевое место Mo для парковки не вводится, последовательность операций управления возвращается к этапу S104, и последовательность операций управления от этапа S104 до этапа S106 многократно выполняется.
[0042] Ниже описывается последовательность операций управления части цикла от этапа S104 до этапа S106. В ситуации, в которой рассматриваемое транспортное средство V движется в позиции P2, проиллюстрированной на фиг. 4B, когда целевое место Mo для парковки не вводится, позиция точки взгляда перемещается вперед, поскольку рассматриваемое транспортное средство V движется.
[0043] Фиг. 4C является третьим видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. По мере того, как рассматриваемое транспортное средство V перемещается вперед, позиция точки взгляда перемещается от G2 к G3. Когда позиция точки взгляда достигает G3, рекомендованное доступное место Mr для парковки изменяется с места PL4 для парковки на место PL5 для парковки.
[0044] Фиг. 6B является вторым видом для описания примера экрана отображения в процессе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Экран отображения по фиг. 6B представляет собой экран отображения, когда рассматриваемое транспортное средство V движется в позиции P3 по фиг. 3C. Как проиллюстрировано на фиг. 6B, когда рассматриваемое транспортное средство V движется вперед, на экране отображения дисплея 21, рамка, указывающая рекомендованное доступное место Mr для парковки, перемещается вперед и изменяется на место PL5 для парковки в соответствии с перемещением рассматриваемого транспортного средства V.
[0045] Здесь, описывается форма для отображения рекомендованного доступного места Mr для парковки, когда рассматриваемое транспортное средство V перемещается в ходе замедления. Как описано выше, устройство 10 управления задает рекомендованное доступное место Mr для парковки для доступного места Me для парковки, которое является ближайшим к точке взгляда. Расстояние до точки взгляда варьируется в соответствии со скоростью транспортного средства для рассматриваемого транспортного средства V.
[0046] Ниже приводится описание для случая, в котором характеристика расстояния до точки взгляда, когда скорость транспортного средства увеличивается, и характеристика расстояния до точки взгляда, когда скорость транспортного средства уменьшается, соответствуют характеристике, проиллюстрированной посредством сплошной линии по фиг. 5, а не гистерезисной характеристике, как проиллюстрировано на фиг. 5. Предполагается, что, в примере по фиг. 4B, рекомендованное доступное место Mr для парковки, заданное, когда скорость транспортного средства составляет Vd, представляет собой место PL5 для парковки. В таком случае, в качестве скорости транспортного средства становится ниже Vd из состояния Vd, расстояние до точки взгляда становится меньше Yb, и рекомендованное доступное место Mr для парковки в силу этого изменяется с места PL5 для парковки на другое место PL4 для парковки. Таким образом, несмотря на тот факт, что рассматриваемое транспортное средство движется к рекомендованному доступному месту Mr для парковки, которое задается перед замедлением, экран дисплея 21 показывает перемещение таким образом, что рамка рекомендованного доступного места Mr для парковки возвращается ниже на экране (в направлении, противоположном направлению движения рассматриваемого транспортного средства, т.е. в отрицательном направлении оси Y по фиг. 6A). Чтобы предотвращать такое неестественное перемещение рекомендованного доступного места Mr для парковки, гистерезис предоставляется для характеристики расстояния до точки взгляда относительно скорости транспортного средства.
[0047] С помощью гистерезисной характеристики, расстояние до точки взгляда поддерживается в Yb, когда скорость транспортного средства становится ниже Vd из состояния Vd. Рекомендованное доступное место Mr для парковки в силу этого остается в позиции места PL5 для парковки или перемещается на место PL6 для парковки на стороне направления движения транспортного средства из позиции места PL5 для парковки. Это позволяет предотвращать неестественное перемещение рекомендованного доступного места Mr для парковки.
[0048] Снова ссылаясь на фиг. 2, когда рассматриваемое транспортное средство V останавливается, в то время как последовательность операций управления от этапа S104 до этапа S106 многократно выполняется, экран отображения дисплея 21 становится экраном, как проиллюстрировано на фиг. 6C. Фиг. 6C является третьим видом для описания примера экрана отображения в процессе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Экран отображения по фиг. 6C представляет собой экран отображения, когда рассматриваемое транспортное средство V останавливается в позиции P3 на фиг. 4C.
[0049] Как проиллюстрировано на экране отображения по фиг. 6C, пользователь находит сообщения, включенные в изображение 21C, и может подтверждать то, что требуется выбор и ввод целевого места Mo для парковки.
[0050] На этапе S107, целевое место Mo для парковки задается и представляется. В примере по фиг. 6C, рекомендованное доступное место Mr для парковки отображается в позиции места PL5 для парковки. Когда, в этом состоянии, водитель или пассажир касается отображаемого участка рекомендованного доступного места Mr для парковки, устройство 10 управления задает место PL5 для парковки в качестве целевого места Mo для парковки.
[0051] Фиг. 4D является четвертым видом для описания примера процесса помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Фиг. 6D является четвертым видом для описания примера экрана отображения в процессе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Экран отображения по фиг. 6D представляет собой экран отображения, когда транспортное средство останавливается в позиции P4 на фиг. 4D. Когда место PL5 для парковки задается в качестве целевого места Mo для парковки, устройство 10 управления управляет дисплеем 21 таким образом, чтобы отображать экран отображения, как проиллюстрировано на фиг. 6D, чтобы за счет этого представлять целевое место Mo для парковки водителю и пассажирам. Водитель и пассажиры находят сообщения, включенные в изображение 21C, и могут подтверждать, что автоматизированное вождение может начинаться.
[0052] Снова ссылаясь на фиг. 2, на этапе S108, устройство 10 управления вычисляет намеченный путь движения для перемещения рассматриваемого транспортного средства на целевое место Mo для парковки. Пользователь обозначает место PL5 для парковки, которое представляется в качестве рекомендованного доступного места Mr для парковки, как проиллюстрировано на фиг. 4C, в качестве целевого места Mo для парковки. Пользователь касается места PL5 для парковки, которое отображается на дисплее 21 с сенсорной панелью, чтобы обозначать это место для парковки в качестве целевого места Mo для парковки. Через эту операцию, целевое место Mo для парковки определяется. Как проиллюстрировано на фиг. 4D, рассматриваемое транспортное средство V перемещается в позицию P4 на стороне целевого места PL5 (Mo) для парковки. Эта позиция P4 представляет собой начальную позицию автоматизированной парковки для рассматриваемого транспортного средства.
[0053] Устройство 10 управления вычисляет намеченный путь движения на основе позиционной взаимосвязи между позицией P4 рассматриваемого транспортного средства V, в котором начинается маневр при парковке (перемещение), и позицией целевого места Mo для парковки. Хотя не ограничено конкретным образом, устройство 10 управления вычисляет намеченный путь движения таким образом, что он включает в себя две кривые. Первая кривая лежит от позиции остановки рассматриваемого транспортного средства V, т.е. начальной позиции, в которой начинается помощь при парковке, до позиции P5 поворота, в которой выполняется поворот для парковки. Вторая кривая лежит от позиции P5 поворота до целевого места Mo для парковки. Устройство 10 управления вычисляет намеченный путь движения, соответствующий каждой из парковки (A) под прямым углом, параллельной парковки (B) и парковки (C) под углом, проиллюстрированных на фиг. 7. В одном или более вариантов осуществления настоящего изобретения, намеченный путь движения вычисляется, но ¢настоящее изобретение не ограничено этим. В альтернативном варианте осуществления, намеченный путь движения, соответствующий типу места для парковки, сохраняется в запоминающем устройстве (ROM), и намеченный путь движения может считываться при парковке. Режим парковки (такой как парковка под прямым углом, параллельная парковка и парковка под углом) может выбираться пользователем рассматриваемого транспортного средства V.
[0054] Устройство 10 управления считывает намеченные пути движения, соответствующие выбранному режиму парковки, и вычисляет намеченный путь движения на основе взаимосвязи между позицией рассматриваемого транспортного средства V при начале процесса автоматизированной парковки и позицией целевого места Mo для парковки. Когда пользователь нажимает вышеописанный переключатель с автоблокировкой в режиме автоматизированной парковки, устройство 10 управления управляет контроллером 30 транспортного средства, чтобы выполнять процесс перемещения рассматриваемого транспортного средства на целевое место Mo для парковки для вычисленного намеченного пути движения.
[0055] На этапе S109, устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения выполняет процесс помощи при парковке или процесс автоматизированной парковки. Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения управляет работой приводной системы 40 через контроллер 30 транспортного средства таким образом, что рассматриваемое транспортное средство перемещается вдоль намеченного пути движения.
[0056] Фиг. 6E является пятым видом для описания примера экрана отображения в процессе помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения. Когда автоматизированное вождение начинается, экран отображения дисплея 21 становится экраном, как проиллюстрировано на фиг. 6E, и рассматриваемое транспортное средство V перемещается вперед. В это время, изображение 21C отображается с сообщениями, информирующими в отношении того, что рассматриваемое транспортное средство V перемещается вперед посредством автоматизированного вождения, и в отношении того, что водитель и пассажиры должны смотреть вокруг рассматриваемого транспортного средства V. Ниже описывается управление автоматизированным вождением, выполняемое посредством устройства 100 помощи при парковке.
[0057] Устройство 100 помощи при парковке вычисляет сигналы команд управления в приводную систему 40 рассматриваемого транспортного средства, к примеру, в EPS-электромотор, при возврате выходного значения датчика 50 угла поворота при рулении устройства рулевого управления таким образом, что траектория движения рассматриваемого транспортного средства V совпадает с вычисленным намеченным посредством движения, и отправляет сигналы команд управления в приводную систему 40 или в контроллер 30 транспортного средства, который управляет приводной системой 40.
[0058] Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения включает в себя модуль управления помощью при парковке. Модуль управления помощью при парковке получает информацию диапазона переключения передач из модуля AT/CVT-управления, информацию скорости вращения колес из модуля ABS-управления, информацию угла поворота при рулении из модуля управления углом поворота при рулении, информацию частоты вращения двигателя из ECM и другую необходимую информацию. На ее основе, модуль управления помощью при парковке вычисляет и выводит информацию с инструкциями по автоматизированному рулению в модуль EPS-управления, информацию с инструкциями, такую как предупреждения, в модуль управления измерительными приборами и т.д. Устройство 10 управления получает информационные элементы, которые получаются посредством датчика 50 угла поворота при рулении устройства рулевого управления транспортного средства и датчика 60 скорости транспортного средства и других датчиков транспортного средства, через контроллер 30 транспортного средства.
[0059] Приводная система 40 согласно одному или более вариантов осуществления настоящего изобретения обеспечивает возможность рассматриваемому транспортному средству V парковаться на целевом месте Mo для парковки посредством вождения на основе сигналов команд управления, полученных из устройства 100 помощи при парковке. Устройство рулевого управления согласно одному или более вариантов осуществления настоящего изобретения представляет собой приводной механизм, который перемещает рассматриваемое транспортное средство V в направлениях вправо и влево. EPS-электромотор, включенный в приводную систему 40, приводит в действие механизм усилителя рулевого управления устройства рулевого управления на основе сигналов команд управления, полученных из устройства 100 помощи при парковке, чтобы управлять величиной руления, и помогает при операции при перемещении рассматриваемого транспортного средства V на целевое место Mo для парковки. Контент помощи при парковке и схема работы не ограничены конкретным образом, и схемы, известные на момент подачи этой заявки, могут надлежащим образом применяться.
[0060] Как проиллюстрировано на фиг. 4D, когда устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения управляет рассматриваемым транспортным средством V таким образом, что оно перемещается на целевое место Mo для парковки вдоль намеченного пути движения, вычисленного на основе позиции P3 начала перемещения рассматриваемого транспортного средства V и позиции целевого места Mo для парковки, операция нажатия педали акселератора/тормоза автоматически управляется на основе указанной управляющей скорости транспортного средства (заданной скорости транспортного средства), и операция руления посредством устройства рулевого управления также автоматически управляется в соответствии со скоростью транспортного средства. Таким образом, во время помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения, операция руления посредством устройства рулевого управления и операция нажатия педали акселератора/тормоза автоматически выполняются. Также можно выполнять процесс парковки посредством дистанционного управления, которое включает в себя передачу команды задания для целевого места Mo для парковки, команды начала процесса парковки, команды приостановки парковки и т.д. в транспортное средство без водителя из внешней среды и выполнение парковки.
[0061] Следует понимать, что пользователь также может нажимать педаль акселератора/тормоза, и только операция руления является автоматизированной. В этом случае, устройство 100 помощи при парковке управляет приводной системой 40 на основе заданной скорости транспортного средства, которая предварительно вычисляется, и управляет устройством рулевого управления транспортного средства на основе заданного угла поворота при рулении, который также предварительно вычисляется, так что рассматриваемое транспортное средство V придерживается намеченного пути G2, G3 движения для перемещения.
[0062] Выше приведен базовый контент управления в устройстве 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения.
[0063] Как проиллюстрировано на фиг. 8, устройство 10 управления анализирует изображение вида сверху, которое формируется из изображений, захваченных посредством камер 1a-1d, чтобы за счет этого обнаруживать места PLn (n является целым числом) и PRn (n является целым числом) для парковки. В таком изображении вида сверху, по мере того, как расстояние от рассматриваемого транспортного средства становится большим, разрешение изображения вида сверху понижается, и точность обнаружения линий рамок ухудшается. Идентичная ситуация возникает, когда поверхность дороги автомобильной парковки наклоняется, например, когда поверхность дороги постепенно наклоняется таким образом, что уровень высоты уменьшается постепенно от полосы движения автомобильной парковки к местам PLn и PRn для парковки на обеих сторонах.
[0064] Следовательно, в одном или более вариантов осуществления настоящего изобретения, процесс обнаружения для линий рамок мест PLn и PRn для парковки выполняется с использованием следующего способа. В нижеприведенном описании, описывается только процесс обнаружения для линий рамок левосторонних мест PLn для парковки, проиллюстрированный на фиг. 8, но процесс обнаружения для линий рамок правосторонних мест PRn для парковки, проиллюстрированный на фиг. 8, также выполняется таким же образом.
[0065] Фиг. 9 является блок-схемой последовательности операций способа, иллюстрирующей процедуру процесса обнаружения линий рамок для мест для парковки, выполняемого посредством устройства 10 управления. Во-первых, на этапе S201, устройство 10 управления выполняет процесс обнаружения линий рамок для мест PLn для парковки в пределах предварительно определенного диапазона на ближней стороне в направлении движения транспортного средства в изображении вида сверху. На этом этапе, устройство 10 управления определяет то, существует или нет пиксельная матрица, в которой яркостная разность между каждым пикселом и его смежным пикселом не меньше первого порогового значения, и длина пиксельной матрицы попадает в первый диапазон пороговых значений, и обнаруживает линию, заданную посредством пиксельной матрицы, удовлетворяющей условиям в качестве возможного варианта линии рамки каждого места PLn для парковки. Затем устройство 10 управления выбирает, из числа обнаруженных возможных вариантов линий рамок, пару возможных вариантов линий рамок, в которой расстояние между ними попадает в первый диапазон пороговых значений, и относительный угол между ними попадает в первый диапазон пороговых значений, и обнаруживает пару возможных вариантов линий рамок в качестве линий рамок места PLn для парковки.
[0066] После этапа S201 выполняется этап S202, на котором устройство 10 управления оценивает позиции линий рамок мест PL3, PL4 и PL5 для парковки, которые существуют в пределах предварительно определенного диапазона на дальней стороне в направлении движения транспортного средства (в направлении по оси Y стрелки по фиг. 8) в изображении вида сверху, на основе позиций линий рамок мест PL1 и PL2 для парковки, обнаруженных из предварительно определенного диапазона на ближней стороне в направлении движения транспортного средства в изображении вида сверху. На этом этапе, поперечные ширины W3, W4 и W5 необнаруженных мест PL3, PL4 и PL5 для парковки оцениваются в качестве среднего значения поперечных ширин W1 и W2 обнаруженных мест PL1 и PL2 для парковки или в качестве одной из поперечных ширин W1 и W2. Затем позиция c, отстоящая на расстояние W3 от позиции b линии рамки на самой дальней стороне в направлении движения транспортного средства из обнаруженных линий рамок, позиция d, отстоящая от позиции c к дальней стороне в направлении движения транспортного средства на расстояние W4, и позиция e, отстоящая от позиции d к дальней стороне в направлении движения транспортного средства на расстояние W5, оцениваются в качестве позиций линий рамок. В вышеприведенном описании, поперечные ширины мест PLn для парковки вычисляются из изображения вида сверху, но настоящее изобретение не ограничено этим. В альтернативном варианте осуществления, некоторая информация может получаться из внешнего сервера, чтобы воспринимать поперечные ширины. Когда поперечные ширины воспринимаются из информации, полученной из внешнего, поперечные ширины могут использоваться для того, чтобы оценивать позиции линий рамок на дальней стороне в направлении движения транспортного средства.
[0067] После этапа S202 выполняется этап S203, на котором устройство 10 управления задает пороговое значение для каждого параметра для обнаружения возможных вариантов линий рамок мест PL3, PL4 и PL5 для парковки из предварительно определенного диапазона на дальней стороне в направлении движения транспортного средства в изображении вида сверху. Здесь, примеры параметра для обнаружения возможных вариантов линий рамок включают в себя длину пиксельной матрицы, в которой яркостная разность между каждым пикселом и его смежным пикселом составляет предварительно определенное значение или больше.
[0068] Фиг. 10 является диаграммой, иллюстрирующей взаимосвязь между позицией в направлении движения транспортного средства и пороговым значением, используемым для обнаружения возможных вариантов линий рамок. Как проиллюстрировано на диаграмме, на этом этапе, пороговое значение яркостной разности в области с шириной H1 вокруг позиции c, оцененной на этапе S202, задается равным второму пороговому значению ниже вышеуказанного первого порогового значения. Пороговое значение яркостной разности в области с шириной H1 вокруг позиции d, оцененной на этапе S202, задается равным третьему пороговому значению ниже второго порогового значения. Пороговое значение яркостной разности в области с шириной H1 вокруг позиции e, оцененной на этапе S202, задается равным четвертому пороговому значению ниже третьего порогового значения. Здесь, ширина H1 для задания второго-четвертого пороговых значений в позициях c, d и e задается больше ширины возможной средней линии рамки. Следует понимать, что задание порогового значения яркостной разности равным второму пороговому значению ниже первого порогового значения служит для того, чтобы расширять диапазон пороговых значений. Это также применяется к другим параметрам, и пороговое значение изменяется, чтобы расширять диапазон пороговых значений таким образом, что линии рамок и/или возможные варианты линий рамок могут легко обнаруживаться.
[0069] Пороговое значение яркостной разности в области между позицией c и позицией d задается равным пороговому значению ниже первого порогового значения и выше второго порогового значения, и пороговое значение яркостной разности в области между позицией d и позицией e задается равной пороговому значению ниже второго порогового значения и выше третьего порогового значения. Пороговое значение яркостной разности в области на более далекой стороне, чем позиция e в направлении движения транспортного средства, задается равным пороговому значению обнаружения ниже третьего порогового значения и выше четвертого порогового значения.
[0070] Фиг. 11 является диаграммой, иллюстрирующей взаимосвязь между позицией в направлении движения транспортного средства и диапазоном пороговых значений, используемым для обнаружения возможных вариантов линий рамок. Как проиллюстрировано на диаграмме, диапазон пороговых значений длины в области с шириной H1 вокруг позиции c, оцененной на этапе S202, задается равным второму диапазону пороговых значений, более широкому, чем первый диапазон пороговых значений. Диапазон пороговых значений длины в области с шириной H1 вокруг позиции d, оцененной на этапе S202, задается равным третьему диапазону пороговых значений, более широкому, чем второй диапазон пороговых значений. Диапазон пороговых значений длины в области с шириной H1 вокруг позиции e, оцененной на этапе S202, задается равным четвертому диапазону пороговых значений, более широкому, чем третий диапазон пороговых значений.
[0071] Диапазон пороговых значений длины в области между позицией c и позицией d задается равным диапазону пороговых значений, более широкому, чем первый диапазон пороговых значений, и более узкому, чем второй диапазон пороговых значений, и диапазон пороговых значений длины в области между позицией d и позицией e задается равным диапазону пороговых значений, более широкому, чем второй диапазон пороговых значений, и более узкому, чем третий диапазон пороговых значений. Диапазон пороговых значений длины в области на более далекой стороне, чем позиция e в направлении движения транспортного средства, задается равным диапазону пороговых значений, более широкому, чем третий диапазон пороговых значений, и более узкому, чем четвертый диапазон пороговых значений.
[0072] Снова ссылаясь на фиг. 9, на этапе S204, устройство 10 управления выполняет процесс обнаружения для возможных вариантов линий рамок в пределах предварительно определенного диапазона на дальней стороне в направлении движения транспортного средства в изображении вида сверху. На этом этапе, для области с шириной H1 вокруг позиции c, выполняется определение в отношении того, существует или нет пиксельная матрица, в которой яркостная разность между каждым пикселом и его смежным пикселом не меньше второго порогового значения, и длина пиксельной матрицы попадает во второй диапазон пороговых значений, и когда условия удовлетворяются, возможный вариант линии рамки обнаруживается из области. Для области с шириной H1 вокруг позиции d, выполняется определение в отношении того, существует или нет пиксельная матрица, в которой яркостная разность между каждым пикселом и его смежным пикселом не меньше третьего порогового значения, и длина пиксельной матрицы попадает в третий диапазон пороговых значений, и когда условия удовлетворяются, возможный вариант линии рамки обнаруживается из области. Для области с шириной H1 вокруг позиции e, выполняется определение в отношении того, существует или нет пиксельная матрица, в которой яркостная разность между каждым пикселом и его смежным пикселом не меньше четвертого порогового значения, и длина пиксельной матрицы попадает в четвертый диапазон пороговых значений, и когда условия удовлетворяются, возможный вариант линии рамки обнаруживается из области.
[0073] После этапа S204 выполняется этап S205, на котором устройство 10 управления задает диапазоны пороговых значений, используемые для обнаружения возможных вариантов линий рамок, обнаруженных на этапе S204, в качестве линий рамок мест PL3, PL4 и PL5 для парковки. На этом этапе, диапазон пороговых значений расстояния между возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции c, и возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции b, задается равным второму диапазону пороговых значений, более широкому, чем вышеуказанный первый диапазон пороговых значений. Диапазон пороговых значений расстояния между возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции d, и возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции c, задается равным третьему диапазону пороговых значений, более широкому, чем вышеуказанный второй диапазон пороговых значений. Диапазон пороговых значений расстояния между возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции e, и возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции d, задается равным четвертому диапазону пороговых значений, более широкому, чем вышеуказанный третий диапазон пороговых значений.
[0074] Помимо этого, на этом этапе, диапазон пороговых значений относительного угла между возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции c, и возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции b, задается равным второму диапазону пороговых значений, более широкому, чем вышеуказанный первый диапазон пороговых значений. Диапазон пороговых значений относительного угла между возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции d, и возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции c, задается равным третьему диапазону пороговых значений, более широкому, чем вышеуказанный второй диапазон пороговых значений. Диапазон пороговых значений относительного угла между возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции e, и возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции d, задается равным четвертому диапазону пороговых значений, более широкому, чем вышеуказанный третий диапазон пороговых значений.
[0075] После этапа S205 выполняется этап S206, на котором для предварительно определенного диапазона на дальней стороне в направлении движения транспортного средства в изображении вида сверху, устройство 10 управления выполняет процесс обнаружения рамок возможных вариантов линий в качестве линий рамок мест PL3, PL4 и PL5 для парковки. На этом этапе, выполняется определение в отношении того, попадает или нет расстояние между возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции c, и возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции b, во второй диапазон пороговых значений расстояния, и в отношении того, попадает или нет относительный угол между возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции c, и возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции b, во второй диапазон пороговых значений относительного угла. Когда условия удовлетворяются, возможный вариант линии рамки, обнаруженный из области с шириной H1 вокруг позиции c, обнаруживается в качестве линии рамки на дальней стороне места PL3 для парковки. Помимо этого, выполняется определение в отношении того, попадает или нет расстояние между возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции d, и возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции c, в третий диапазон пороговых значений расстояния, и в отношении того, попадает или нет относительный угол между возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции d, и возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции c, в третий диапазон пороговых значений относительного угла. Когда условия удовлетворяются, возможный вариант линии рамки, обнаруженный из области с шириной H1 вокруг позиции d, обнаруживается в качестве линии рамки на дальней стороне места PL4 для парковки. Дополнительно, выполняется определение в отношении того, попадает или нет расстояние между возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции e, и возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции d, в четвертый диапазон пороговых значений расстояния, и в отношении того, попадает или нет относительный угол между возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции e, и возможным вариантом линии рамки, обнаруженным из области с шириной H1 вокруг позиции d, в четвертый диапазон пороговых значений относительного угла. Когда условия удовлетворяются, возможный вариант линии рамки, обнаруженный из области с шириной H1 вокруг позиции e, обнаруживается в качестве линии рамки на дальней стороне места PL5 для парковки.
[0076] В вышеприведенном описании, возможный вариант линии рамки извлекается на основе яркостной разности между пиксельной матрицей и ее смежной пиксельной матрицей, и длина пиксельной матрицы и после этого линия рамки обнаруживаются на основе относительного угла между линиями рамок и расстояния между линиями рамок, но один или более вариантов осуществления настоящего изобретения не ограничены этим. Например, возможный вариант линии рамки может извлекаться на основе относительного угла между линиями рамок и расстояния между линиями рамок, и после этого линия рамки может обнаруживаться на основе яркостной разности между пиксельной матрицей и ее смежной пиксельной матрицей и длины пиксельной матрицы. Помимо яркостной разности между пиксельной матрицей и ее смежной пиксельной матрицей, длины пиксельной матрицы, относительного угла между линиями рамок и расстояния между линиями рамок, факторы ширины линии разметки и перпендикулярности к полосе движения могут использоваться для того, чтобы извлекать возможные варианты линий рамок и/или обнаруживать линии рамок. Когда возможные варианты линий рамок извлекаются, и/или линии рамок обнаруживаются, параметры и комбинация вышеозначенного не ограничены вообще. Когда возможные варианты линий рамок извлекаются, и/или линии рамок обнаруживаются с использованием каждого параметра, изменение порогового значения (понижение порогового значения) соответствует расширению диапазона пороговых значений.
[0077] Помимо этого, линии рамок в вышеприведенном описании не обязательно ограничены прямыми линиями, и настоящее изобретение может применяться к случаю пунктирных линий и к случаю, в котором прямые линии являются ломаными. В таких случаях пунктирных линий и ломаных прямых линий, позиции с линиями рамок могут быть ограничены для обнаружения и извлечения, или позиции без линий рамок могут дополняться, чтобы допускать прямые линии с использованием информации по позициям, в которых существуют линии рамок.
[0078] Устройство 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения сконфигурировано и работает так, как указано выше, и в силу этого имеет следующие преимущества.
[0079] Когда значение параметра (такого как длина пиксельной матрицы, при которой яркостная разность между каждым пикселом и его смежным пикселом составляет предварительно определенное значение или больше), используемого для обнаружения линий рамок мест PLn для парковки, попадает в первый диапазон пороговых значений, устройство 10 управления устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения обнаруживает линии рамок мест PL1 и PL2 для парковки из предварительно определенного диапазона на ближней стороне в направлении движения транспортного средства. Затем устройство 10 управления оценивает позиции линий рамок необнаруженных мест PL3, PL4 и PL5 для парковки на основе позиций обнаруженных линий рамок. Необнаруженные места PL3, PL4 и PL5 для парковки расположены в пределах предварительно определенного диапазона на дальней стороне в направлении движения транспортного средства. Здесь, устройство 10 управления задает диапазоны пороговых значений для значения параметра, которые используются для обнаружения линий рамок мест PL3, PL4 и PL5 для парковки в оцененных позициях линий рамок в пределах предварительно определенного диапазона на дальней стороне в направлении движения транспортного средства, равными второму-четвертому диапазонам пороговых значений, которые являются более широкими, чем вышеуказанный первый диапазон пороговых значений.
[0080] Это позволяет исключать ситуацию, в которой по мере того, как расстояние от рассматриваемого транспортного средства V увеличивается, разрешение захваченного изображения понижается, чтобы затруднять обнаружение линии рамок. Вероятность того, что линии рамок мест для парковки могут обнаруживаться, в силу этого увеличивается.
[0081] Кроме того, по мере того, как расстояние между оцененной позицией линии рамки каждого места PLn для парковки и рассматриваемым транспортным средством V увеличивается, устройство 10 управления устройства 100 помощи при парковке согласно одному или более вариантов осуществления настоящего изобретения задает диапазон пороговых значений для значения параметра, который используется для обнаружения линии рамки места PLn для парковки в оцененной позиции, таким образом, что он постепенно расширяется в порядке второго диапазона пороговых значений, третьего диапазона пороговых значений и четвертого диапазона пороговых значений.
[0082] Таким образом, для каждой оцененной позиции соответствующий диапазон пороговых значений задается в соответствии с расстоянием от рассматриваемого транспортного средства V до оцененной позиции. Это позволяет больше повышать вероятность того, что линия рамки каждого места PLn для парковки может обнаруживаться.
[0083] Далее описывается модифицированный пример способа задания для пороговых значений обнаружения. Повторяющееся описание вопросов, идентичных вопросам в вышеописанных вариантах осуществления, опускается, и описание, приведенное в вышеописанных вариантах осуществления, заимствуется здесь.
[0084] Фиг. 12 является диаграммой, иллюстрирующей взаимосвязь между позицией в направлении движения транспортного средства и пороговым значением, используемым для обнаружения возможных вариантов линий рамок. Как проиллюстрировано на диаграмме, пороговое значение яркостной разности в области с шириной H1 вокруг позиции c задается равным второму пороговому значению ниже вышеуказанного первого порогового значения. Пороговое значение яркостной разности в области с шириной H2 вокруг позиции d задается равным третьему пороговому значению ниже второго порогового значения. Пороговое значение яркостной разности в области с шириной H3 вокруг позиции e задается равным четвертому пороговому значению ниже третьего порогового значения.
[0085] Здесь, ширина H1 области, в которой второе пороговое значение задается равным позиции c, ширина H2 области, в которой третье пороговое значение задается равным позиции d, и ширина H3 области, в которой четвертое пороговое значение задается равным позиции e, удовлетворяют взаимосвязи следующей формулы (1).
H1<H2<H3 (1)
[0086] В способе задания для пороговых значений этого примера, по мере того, как расстояние от рассматриваемого транспортного средства увеличивается в порядке оцененных позиций c, d и e, ширины областей для задания второго-четвертого пороговых значений постепенно задаются таким образом, что они постепенно увеличиваются в порядке H1, H2 и H3. Таким образом, для каждой оцененной позиции, соответствующая ширина области, в которой уменьшается пороговое значение, задается в соответствии с расстоянием от рассматриваемого транспортного средства V до оцененной позиции. Кроме того, это позволяет повышать вероятность того, что линия рамки каждого места для парковки может обнаруживаться.
[0087] "Устройство 10 управления" в вышеописанных вариантах осуществления соответствует примерам "детектора линий рамок", "модуля оценки" и "устройства задания пороговых значений" в настоящем изобретении. "Камера 1" в вышеописанных вариантах осуществления соответствует примеру "устройства захвата изображений" в настоящем изобретении.
[0088] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0089] Например, в вышеописанных вариантах осуществления, настоящее изобретение описывается со ссылкой на пример процесса обнаружения для линий рамок мест PLn и PRn для парковки в схеме парковки под прямым углом, но настоящее изобретение также может применяться к процессу обнаружения линий рамок для мест для парковки в схеме параллельной парковки (см. часть (B) по фиг. 7) и мест для парковки в схеме парковки под углом (см. часть (C) по фиг. 7).
[0090] Кроме того, способ задания для пороговых значений обнаружения, как описано в вышеописанных вариантах осуществления и в модифицированном примере способа задания для пороговых значений обнаружения, может комбинироваться. Таким образом, пороговые значения обнаружения могут задаваться таким образом, что по мере того, как расстояние между рассматриваемым транспортным средством V и оцененной позицией линии рамки увеличивается, диапазон пороговых значений постепенно расширяется, и ширина области, в которой расширяется диапазон пороговых значений, постепенно увеличивается.
[0091] Кроме того, вышеописанные варианты осуществления описываются при допущении относительно наличия одной или более камер, предоставленных на транспортном средстве, но настоящее изобретение не ограничено этим. В одном или более вариантов осуществления настоящего изобретения, также может использоваться стационарная камера, предоставленная на автомобильной парковке, камера другого транспортного средства или портативная камера, носимая пользователем. В таком случае, информация относительно места для парковки может получаться из внешней среды, чтобы воспринимать состояние парковки для места для парковки.
Описание номеров ссылок
[0092] 1 - камера
10 - устройство управления

Группа изобретений относится к устройству и способу обнаружения линий рамки парковочного места. Способ, осуществляющийся устройством обнаружения линии рамки парковочного места, включает шаги, на которых обнаруживают линии рамки, когда значение параметра, используемого для обнаружения линии рамки, попадает в первый диапазон пороговых значений. Оценивают позицию необнаруженной линии рамки на основе позиции обнаруженной линии рамки. Задают диапазон пороговых значений, используемый для обнаружения линии рамки в оцененной позиции линии рамки, равным второму диапазону пороговых значений, более широкому, чем первый диапазон пороговых значений. Обеспечивается точное обнаружение линии рамки парковочного места, независимо от разрешения захваченного изображения. 3 н. и 1 з.п. ф-лы, 19 ил. 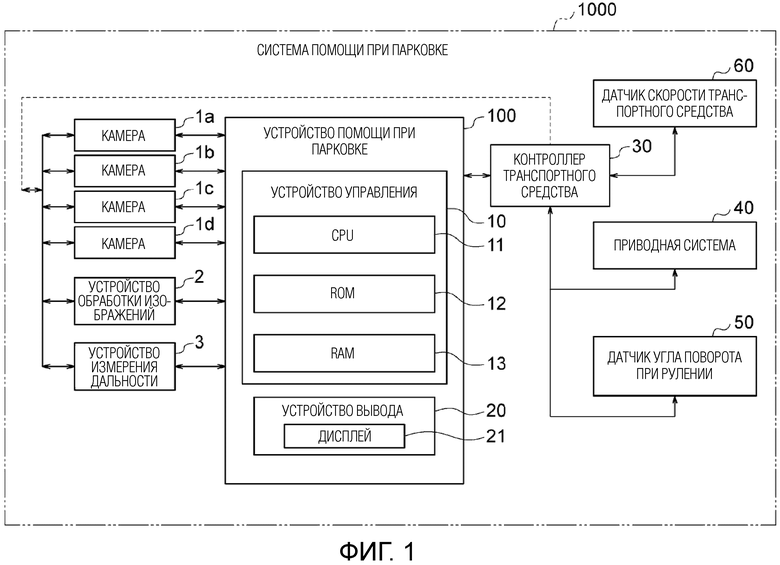
1. Способ обнаружения линии рамки места для парковки из захваченного изображения, полученного посредством устройства захвата изображений, содержащий этапы, на которых:
обнаруживают линию рамки, когда значение параметра, используемого для обнаружения линии рамки, попадает в первый диапазон пороговых значений;
оценивают позицию необнаруженной линии рамки на основе позиции обнаруженной линии рамки;
задают диапазон пороговых значений для значения параметра равным второму диапазону пороговых значений, более широкому, чем первый диапазон пороговых значений, причем диапазон пороговых значений используется для обнаружения линии рамки в оцененной позиции линии рамки, причем линия рамки содержит множество линий рамок, причем оцененная позиция содержит множество оцененных позиций; и
задают второй диапазон пороговых значений таким образом, что он расширяется для каждой из оцененных позиций линий рамок по мере того, как расстояние между оцененной позицией линии рамки и устройством захвата изображений увеличивается.
2. Способ обнаружения линии рамки места для парковки из захваченного изображения, полученного посредством устройства захвата изображений, содержащий этапы, на которых:
обнаруживают линию рамки, когда значение параметра, используемого для обнаружения линии рамки, попадает в первый диапазон пороговых значений;
оценивают позицию необнаруженной линии рамки на основе позиции обнаруженной линии рамки;
задают диапазон пороговых значений для значения параметра равным второму диапазону пороговых значений, более широкому, чем первый диапазон пороговых значений, причем диапазон пороговых значений используется для обнаружения линии рамки в оцененной позиции линии рамки; и
задают ширину области, в которой второй диапазон пороговых значений задается таким образом, что он расширяется по мере того, как расстояние между оцененной позицией линии рамки и устройством захвата изображений увеличивается.
3. Способ по п. 1 или 2, в котором:
когда первая оцененная позиция и вторая оцененная позиция существуют в качестве оцененной позиции линии рамки, причем вторая оцененная позиция расположена рядом с первой оцененной позицией и на дальней стороне первой оцененной позиции относительно устройства захвата изображений,
второй диапазон пороговых значений в первой оцененной позиции задается более узким, чем второй диапазон пороговых значений во второй оцененной позиции, и
первый диапазон пороговых значений в позиции между первой оцененной позицией и второй оцененной позицией задается более узким, чем второй диапазон пороговых значений в первой оцененной позиции и второй оцененной позиции.
4. Устройство для обнаружения линии рамки места для парковки из захваченной информации, полученной посредством устройства захвата изображений, содержащее:
детектор линий рамок, выполненный с возможностью обнаруживать линию рамки, когда значение параметра, используемого для обнаружения линии рамки, попадает в первый диапазон пороговых значений;
модуль оценки, выполненный с возможностью оценивать позицию необнаруженной линии рамки на основе позиции линии рамки, обнаруженной посредством детектора линий рамок; и
устройство задания пороговых значений, выполненное с возможностью задавать диапазон пороговых значений для значения параметра равным второму диапазону пороговых значений, более широкому, чем первый диапазон пороговых значений, причем диапазон пороговых значений используется для обнаружения линии рамки в позиции линии рамки, оцененной посредством модуля оценки,
при этом линия рамки содержит множество линий рамок, и оцененная позиция содержит множество оцененных позиций,
при этом устройство задания пороговых значений задает второй диапазон пороговых значений таким образом, что он расширяется для каждой из оцененных позиций линий рамок по мере того, как расстояние между оцененной позицией линии рамки и устройством захвата изображений увеличивается.
| US 7969326 B2, 28.06.2011 | |||
| CN 102458964 B, 28.01.2015 | |||
| JP 2015064795 A, 09.04.2015 | |||
| JP 2010224926 A, 07.10.2010. |

