Настоящее изобретение относится к приводной системе, управляющей перемещением объекта, в частности платформы или седла реабилитационного тренажера, предназначенного для восстановления нижних конечностей и туловища, с двумя степенями свободы вращения относительно двух пересекающихся перпендикулярных друг другу осей вращения. Согласно дополнительному аспекту настоящее изобретение относится к реабилитационному тренажеру, предназначенному для восстановления нижних конечностей и туловища и содержащему платформу, на которою пациент может опереться, поставив одну ногу или обе ноги, первую приводную систему, управляющую поворотом платформы относительно двух перпендикулярных осей вращения, седло и вторую приводную систему, управляющую поворотом седла относительно двух перпендикулярных осей вращения.
Обычно лечение патологий нижних конечностей и позвоночного столба осуществляется путем одновременного воздействия на несколько отделов тела, так как эти отделы тела тесно взаимосвязаны. Лечение патологий нижних конечностей на практике не может выполняться без воздействия на туловище и таз, так как мышцы туловища и таза играют важную роль в обеспечении устойчивости тела и движения нижних конечностей. Это может иметь место, например, при тренировке устойчивости туловища, когда пациент должен выполнять упражнения как в выпрямленном положении стоя, так и в положении сидя, нацеленные на тренировку мышц туловища, играющих важную роль в обеспечении устойчивости и движения тела, а также для сохранения осанки. Такого рода упражнения обычно являются частью протокола реабилитации при повреждении нижних конечностей.
На сегодняшний день не существует устройств или аппаратов, позволяющих выполнять пациенту лечебные упражнения как в выпрямленном положении стоя, так и в положении сидя одновременно активным и пассивным способом и с возможностью управления степенью восстановления посредством измерения биомеханических и функциональных параметров. В частности пациенту представляется крайне сложным выполнять упражнения по пассивной мобилизации таза, используя известные аппараты. Перед началом реабилитационного процесса физиотерапевты оценивают функциональность тела в целом, для чего им может потребоваться один аппарат, позволяющий определить функциональные возможности различных связанных друг с другом отделов тела. Использование только одного аппарата позволит физиотерапевтам минимизировать продолжительность и обеспечить максимальную эффективность реабилитационного лечения, так как им больше не придется применять различные устройства для лечения отдела тела в целом и, как следствие, им больше не придется перемещать пациента от одного устройства к другому в рамках одного реабилитационного протокола.
Упражнения, предусмотренные стандартными реабилитационными протоколами, в настоящее время выполняются с использованием различных устройств, включая, например, устройства для длительной пассивной мобилизации (СРМ), динамометры, эластичные ленты, Бобат-шары, фитболы, проприоцептивные подножки и т.д. Многие из этих устройств представляют собой простые работающие пассивным образом приспособления, не позволяющие осуществить объективное измерение всех параметров, таких как, например, сила, смещение, направление действия нагрузки, отклонение от положения равновесия и т.д. При использовании устройств, оснащаемых средством измерения, полученные данные нельзя объединять с данными, полученными в следствие применения других устройств, поэтому возникает сложность регистрации полученных результатов измерений в цифровой базе данных и корреляции этих данных для выполнения комплексной оценки состояния пациента.
Международная заявка на патент WO 2010/092497 от имени Заявителя описывает реабилитационное устройство, в частности предназначенное для лечения травм пяточной части стопы и содержащее опорную базу, подвижную платформу, на которой посредством стяжных лент с застежкой типа «велкро» может фиксироваться нога пациента, центральную стойку, нижняя часть которой прочно соединена с опорной базой, а верхняя часть соединена с платформой посредством универсального шарнира, и три «активные» ноги, каждая из которых содержит линейный привод с корпусом, нижняя часть которого подсоединена к опорной базе посредством универсального шарнира, а также штока, верхняя часть которого подсоединена к платформе посредством шарового шарнира. Это известное устройство позволяет выполнять различные типы упражнений, которые являются полезными не только при лечении травм пяточной части стопы, но и для тренировки мышц туловища и тренировки равновесия, а также позволяет измерить целевые параметры лечения. Однако, это известное устройство имеет ряд недостатков, связанных с его размером, жесткостью и функциональными возможностями. В частности, это известное устройство характеризуется значительной высотой, обуславливающей необходимость установки вокруг платформы опоры с лестницей, по которой пациент должен подниматься на платформу, что делает устройство непригодным для применения в медицинских целях.
Устройство для тренировки равновесия также известно и продается компанией LPG SYSTEMS под торговым названием HUBER® MOTION LAB. Этот известное устройство содержит подвижную платформу с двумя степенями свободы поворота относительно двух перпендикулярных осей вращения и приводную систему, управляющую движением платформы. В частности, приводная система содержит два линейных привода, соединенных посредством универсального шарнира с нижней частью рычага, верхний конец которого жестко прикреплен к центру нижней поверхности платформы. В этом случае к недостаткам устройства можно отнести его значительную высоту, обуславливаемую, в частности, длиной рычага, которая не может быть меньше определенного значения, при котором приводная система обеспечивает величину момента, достаточную для выдерживания веса пациента, опирающегося (полностью) на платформу. Дополнительным недостатком устройства является возможность его использования только для бипедальной тренировки.
WO 2014/085732, но основании которого составлена преамбула независимого пункта 1 формулы изобретения, описывает тренажер для реабилитации пяточной части стопы и тренировки равновесия, содержащий подвижную платформу, предназначенную для поддержки ноги пациента, и приводной системы, управляющей поворотом платформы вокруг относительно пересекающихся и перпендикулярных друг другу осей вращения, а именно оси эверсии/инверсии и оси сгибания/распрямления. Подвижная платформа устанавливается на подвижную раму, обеспечивающую вращение относительно оси эверсии/инверсии, а подвижная рама в свою очередь опирается на жестко закрепленную раму, обеспечивающую вращение относительно оси сгибания/распрямления. Приводная система содержит первый электромеханический приводной блок, управляющий вращением подвижной рамы относительно оси сгибания/распрямления, и второй электромеханический приводной блок, управляющий вращением подвижной платформы относительно оси эверсии/инверсии. Приводная система, предлагаемая в рамках известного уровня техники, характеризуется громоздкостью как в вертикальном, так и в горизонтальном направлениях, поэтому амплитуда вращения ограничена. Кроме того, на подвижную платформу можно поставить только одну ступню, поэтому на тренажер требуется установка двух подвижных платформ и, соответственно, двух приводных систем, что необходимо для обеспечения возможности бипедальной тренировки пациента.
Задачей настоящего изобретения является создание приводной системы, управляющей поворотом объекта, а именно платформы и/или седла реабилитационного тренажера, относительно двух пересекающихся и перпендикулярных друг другу осей вращения, которая была бы более компактной, по сравнению с системой, описание которой дано выше. Дополнительной задачей настоящего изобретения является создание приводной системы, способной управлять поворотными движениями относительно двух осей вращения с угловыми диапазонами сравнимыми с угловыми диапазонами вращательных движений пяточного сустава (эверсионно/инверсионные движения и сгибания/распрямления.) Еще одной задачей настоящего изобретения является создание реабилитационного тренажера, позволяющего выполнять упражнения, нацеленные на восстановление функций нижних конечностей, в частности, пяточной части стопы, а также упражнения для тренировки равновесия и устойчивости тела как в монопедальном, так и в бипедальном режимах.
Эти и другие задачи полностью достигаются в соответствии с настоящим изобретением благодаря приводной системе, обладающей характеристиками, устанавливаемыми независимым пунктом 1 формулы изобретения, а также благодаря реабилитационному тренажеру, описание которого предусмотрено пунктом 5 формулы изобретения.
Дополнительные предпочтительные варианты осуществления настоящего изобретения составляют предмет зависимых пунктов формулы изобретения, содержание которых следует определить как составляющее неотделимую составную часть следующего описания.
Дополнительные отличительные признаки и преимущества настоящего изобретения станут ясны из нижеследующего подробного описания, приведенного исключительно в виде неограничивающего примера со ссылкой на прилагаемые чертежи, на которых:
Фигура 1: вид приводной системы в перспективе, управляющей поворотом объекта относительно пересекающихся и перпендикулярных друг другу осей вращения согласно варианту осуществления настоящего изобретения;
Фигура 2: вид приводной системы в перспективе, изображенной на Фигуре 1, точка обзора отлична от Фигуры 1;
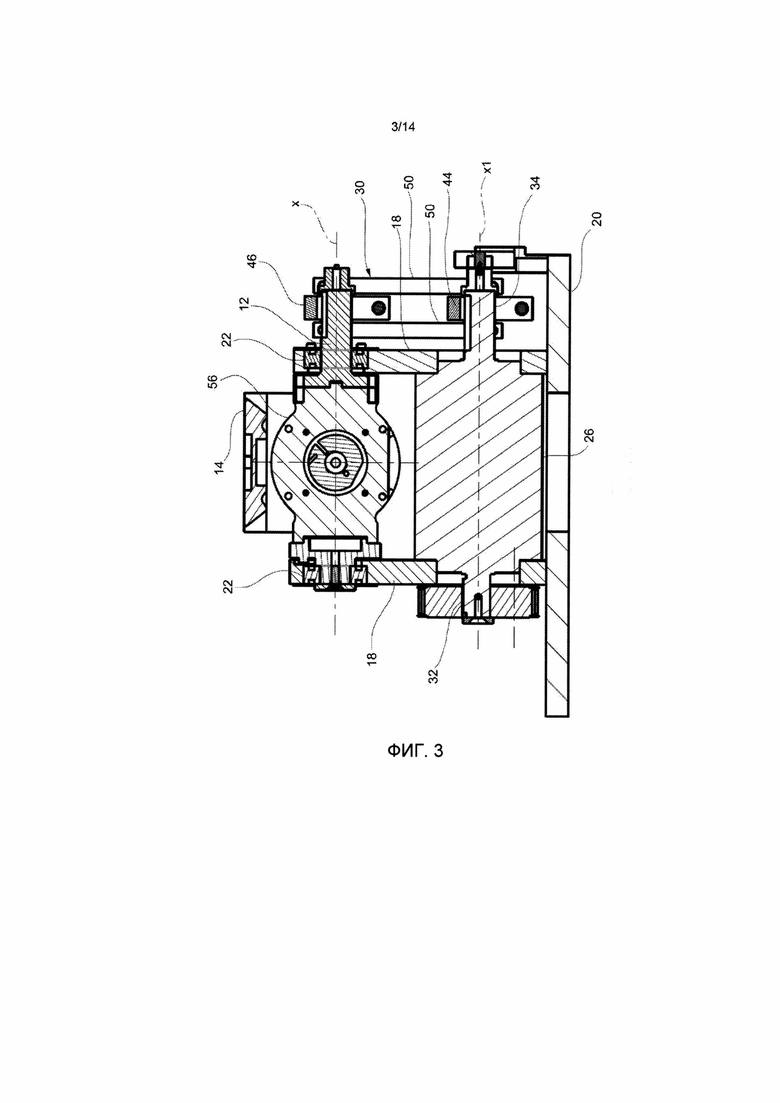
Фигура 3: вид в поперечном разрезе приводной системы, изображенной на Фигуре 1, в вертикальной плоскости, проходящей через первую ось вращения;
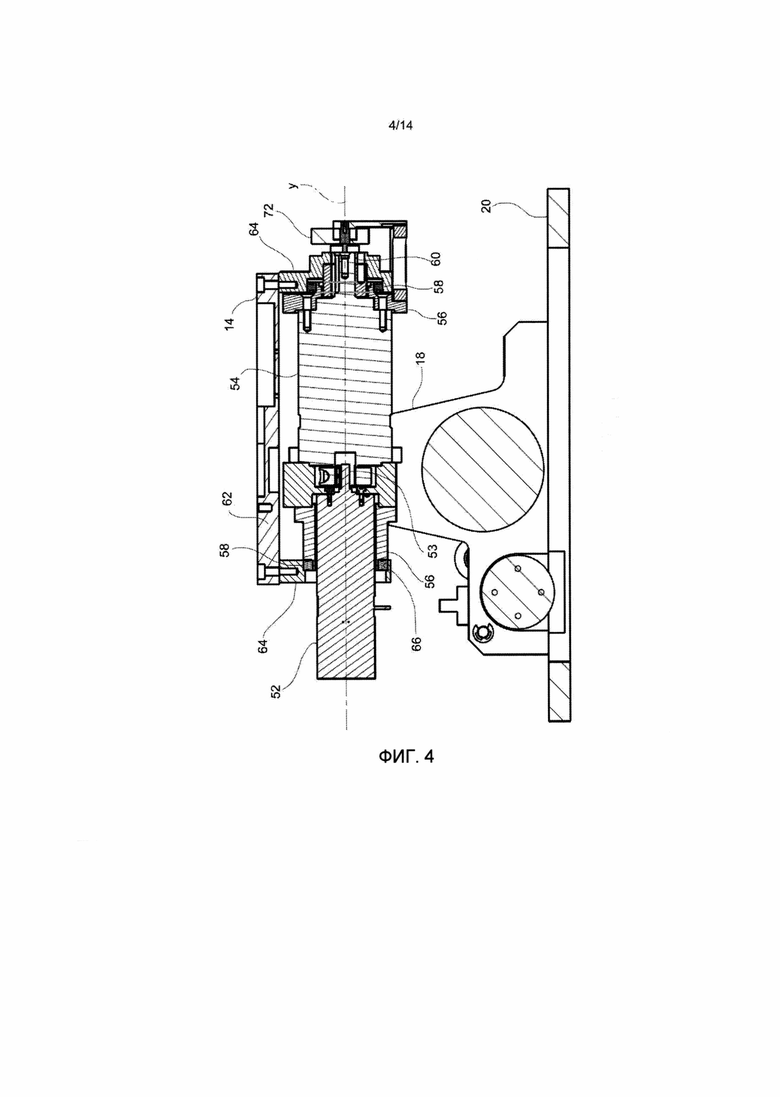
Фигура 4: вид в поперечном разрезе приводной системы, изображенной на Фигуре 1, в вертикальной плоскости, проходящей через вторую ось вращения;
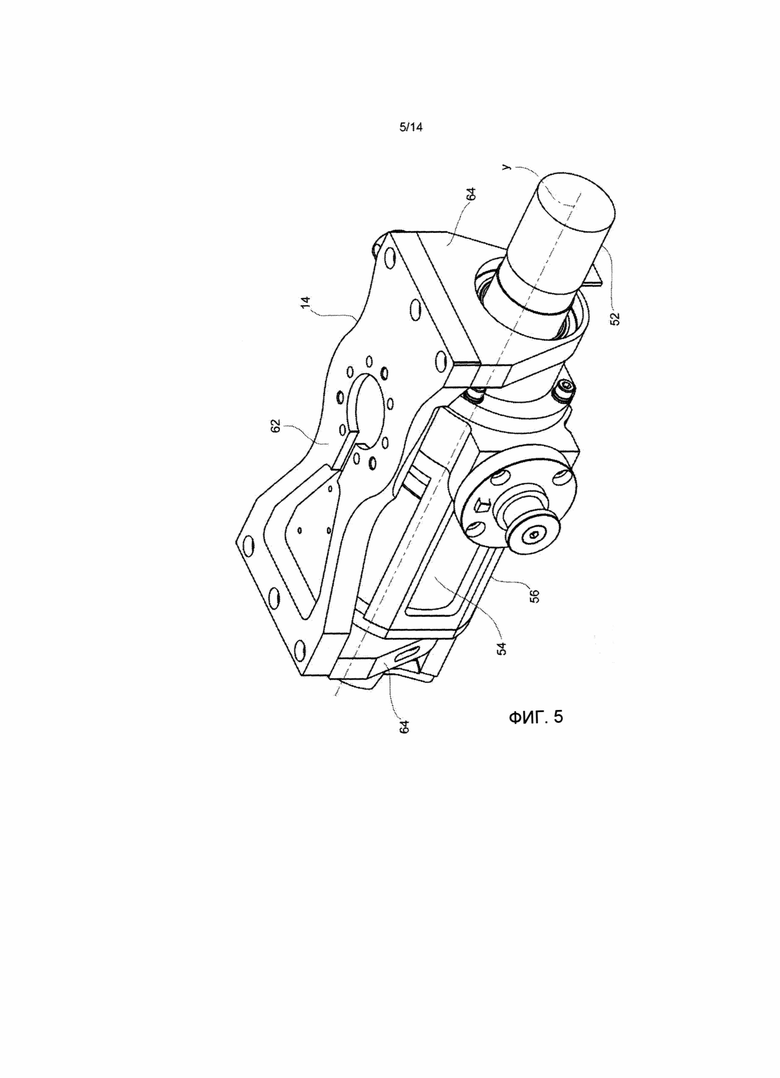
Фигура 5: вид второго приводного блока приводной системы в перспективе, изображенной на Фигуре 1;
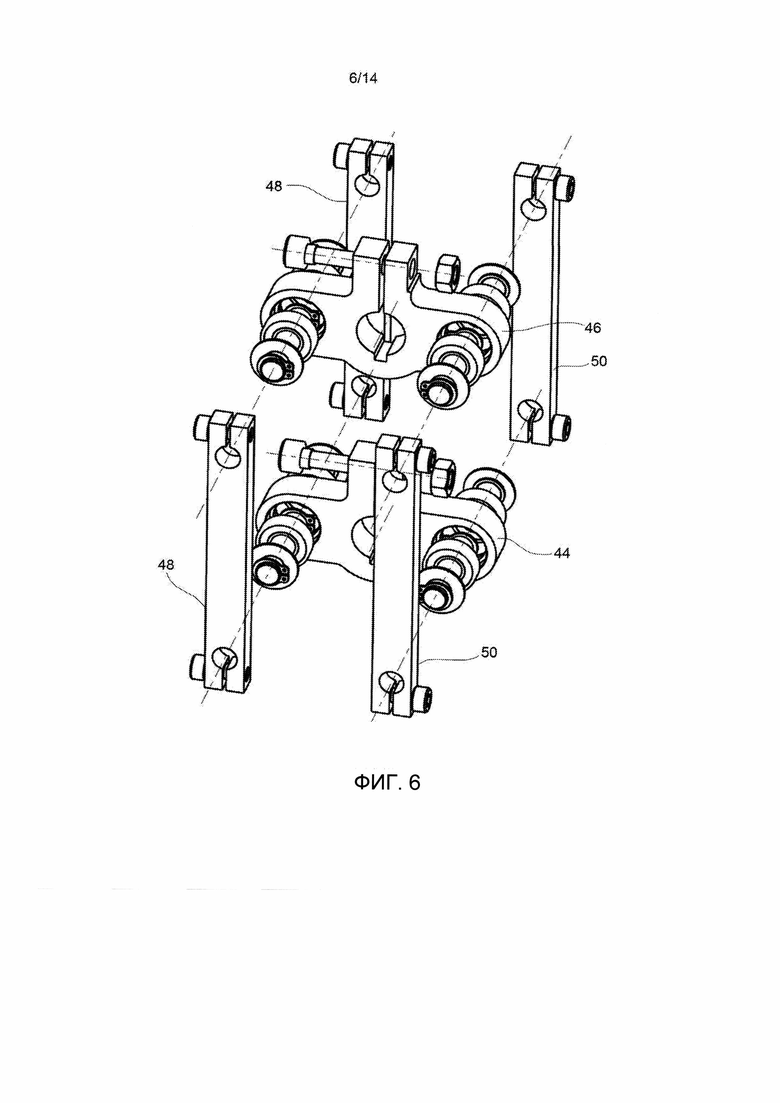
Фигура 6: чертеж в разобранном виде второго трансмиссионного механизма первого приводного блока приводной системы, изображенной на Фигуре 1;
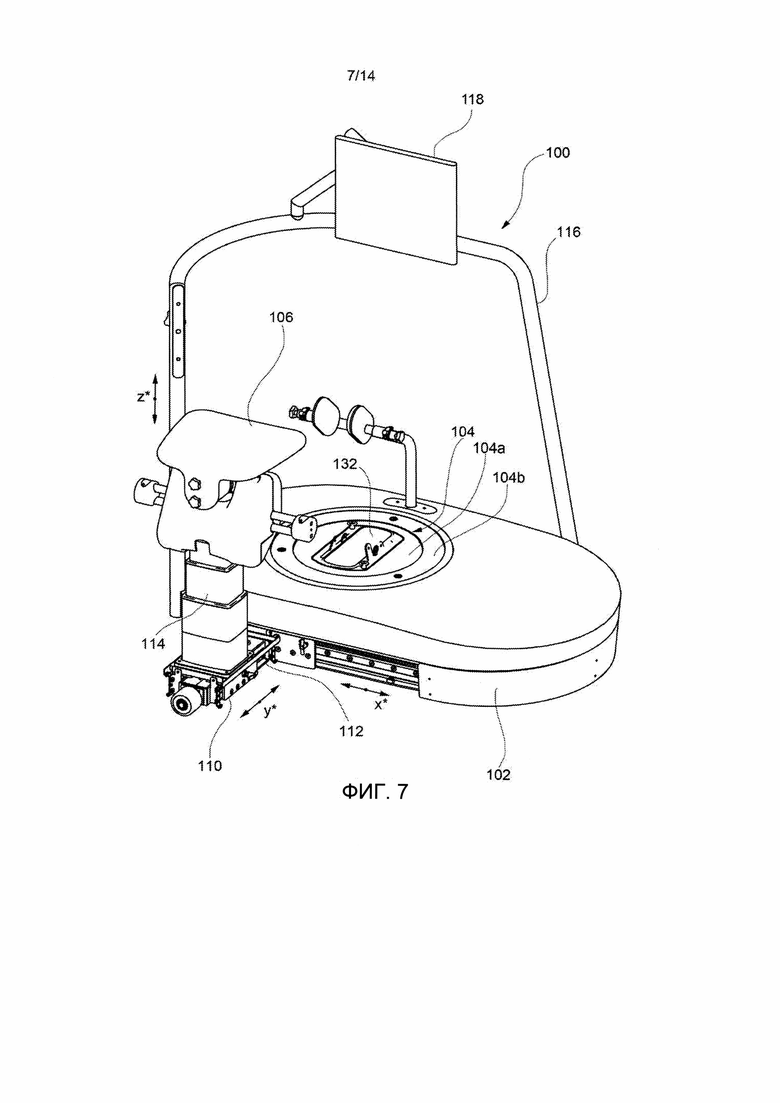
Фигура 7: вид реабилитационного тренажера для восстановления нижних конечностей и туловища в перспективе, в состав которого входит приводная система, изображенная на Фигуре 1;
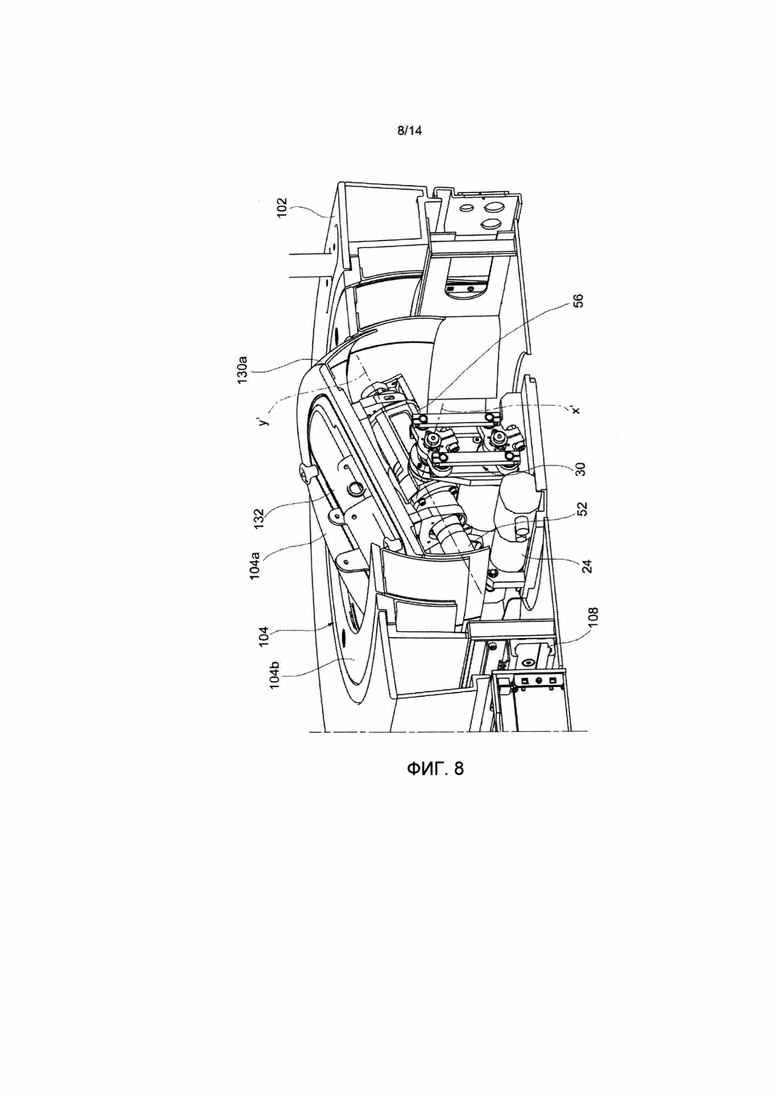
Фигура 8: вид с местным разрезом тренажера, изображенного на Фигуре 7, в условиях, когда платформа настроена на монопедальный режим работы с возможностью поворота на определенный угол относительно первой оси вращения;
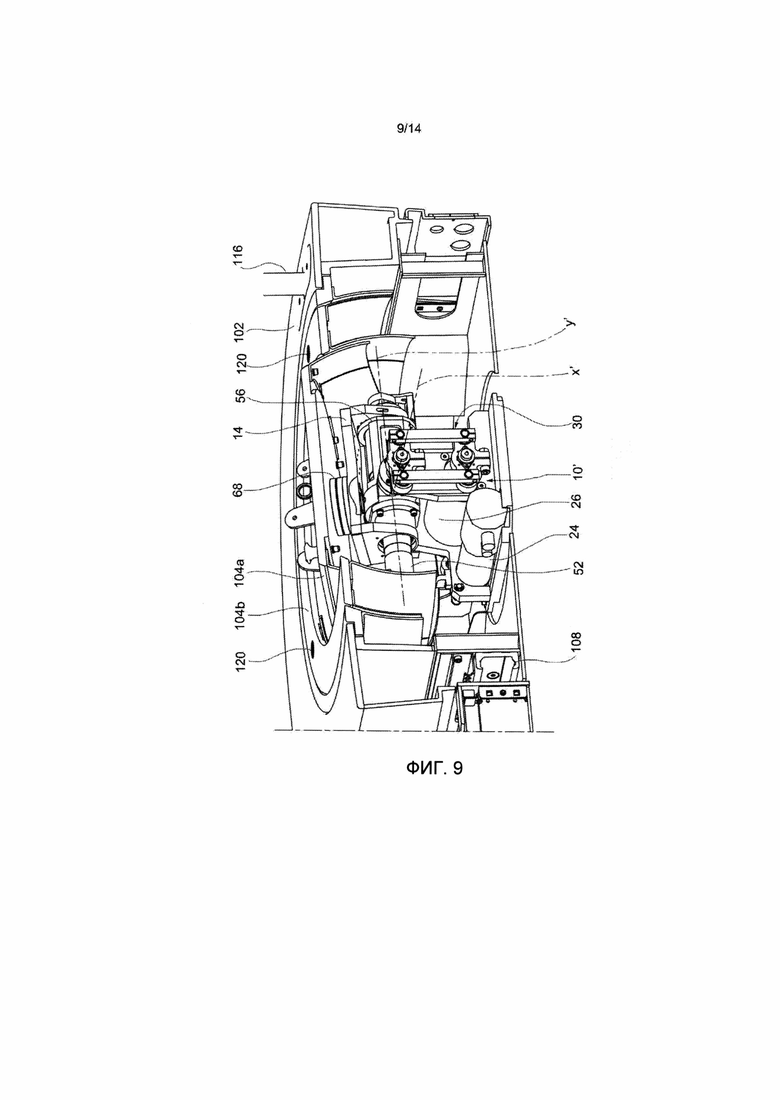
Фигура 9: вид с местным разрезом тренажера, изображенного на Фигуре 7, в условиях, когда платформа настроена на монопедальный режим работы с возможностью поворота на определенный угол относительно второй оси вращения;
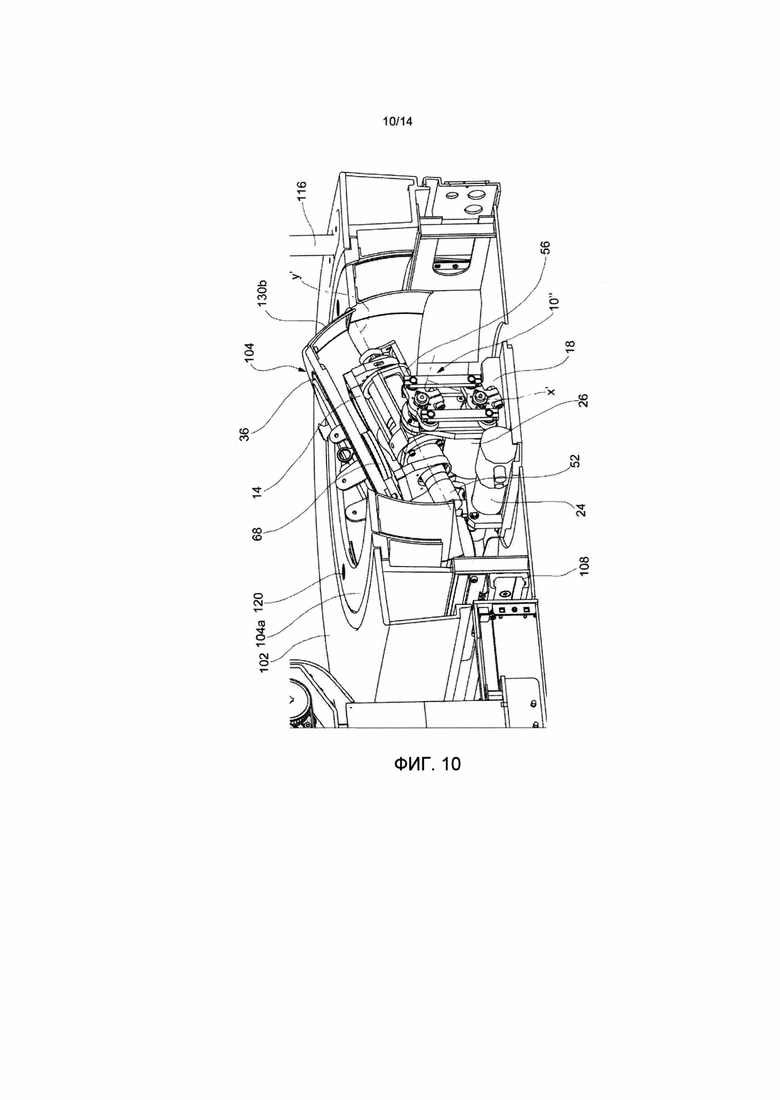
Фигура 10: вид с местным разрезом тренажера, изображенного на Фигуре 7, в условиях, когда платформа настроена на бипедальный режим работы с возможностью поворота на определенный угол относительно первой оси вращения и второй оси вращения;
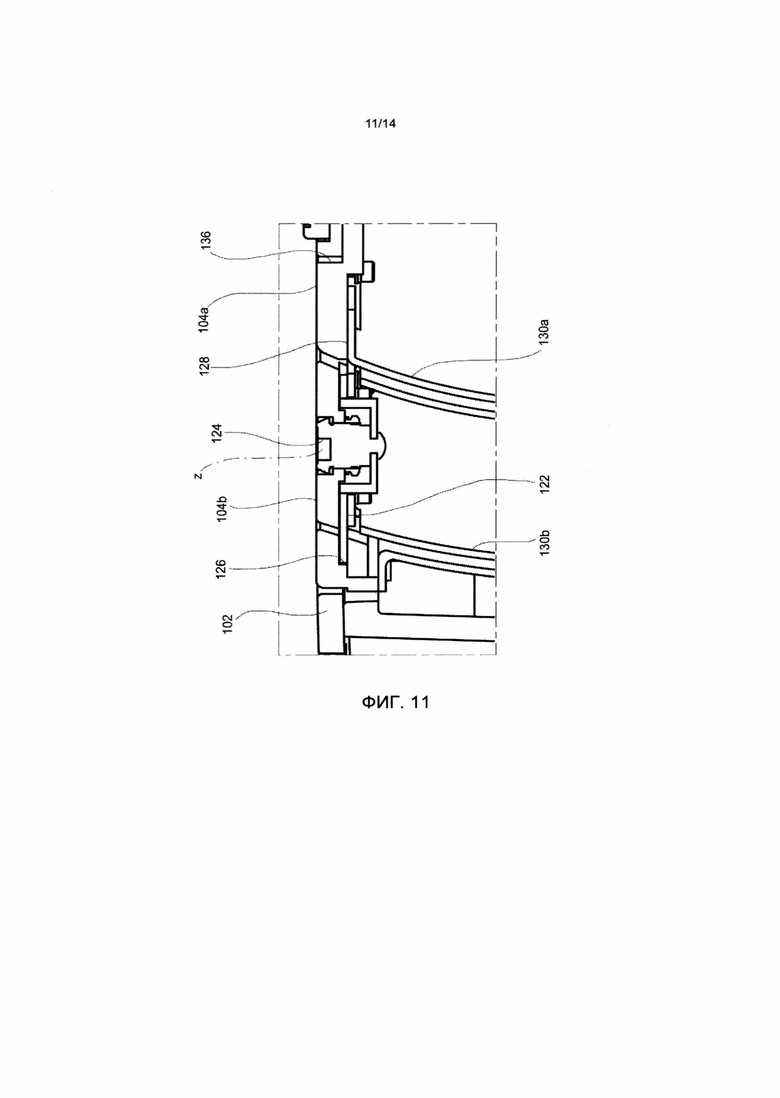
Фигура 11: вид в поперечном разрезе платформы тренажера, изображенного на Фигуре 7;
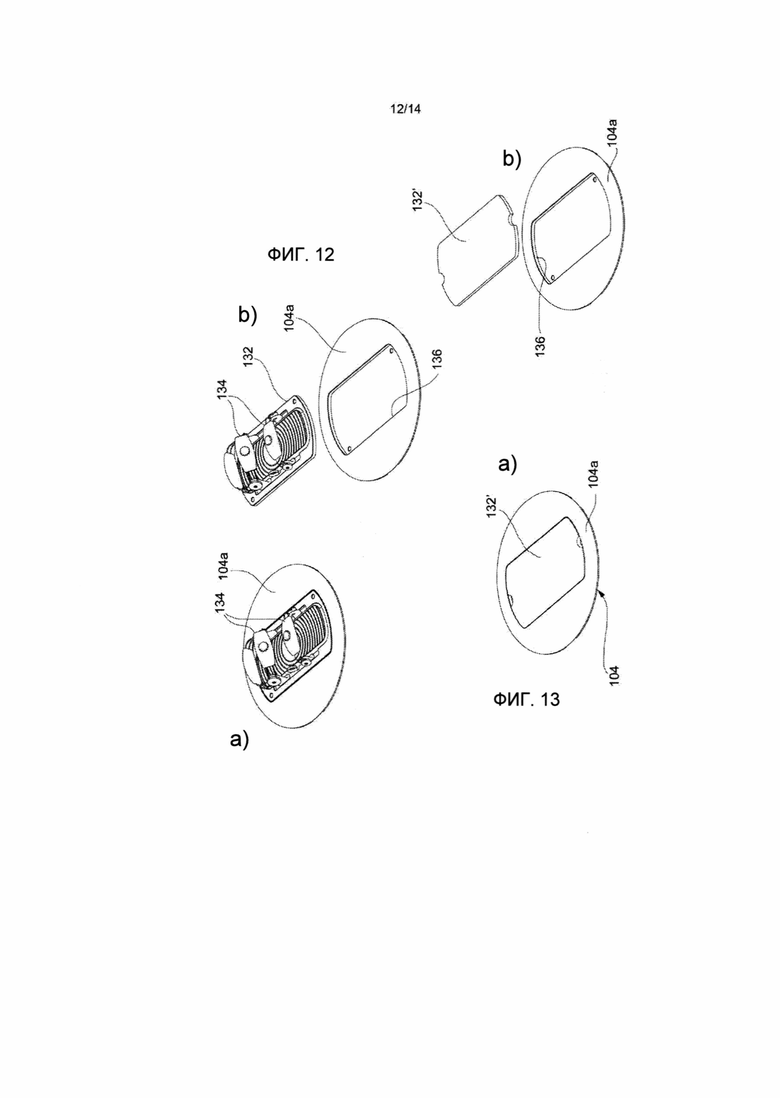
Фигуры 12а и 12b: схемы платформы тренажера, изображенного на Фигуре 7, настроенного на монопедальный режим работы;
Фигуры 13а и 13b: схемы платформы тренажера, изображенного на Фигуре 7, настроенного на бипедальный режим работы;
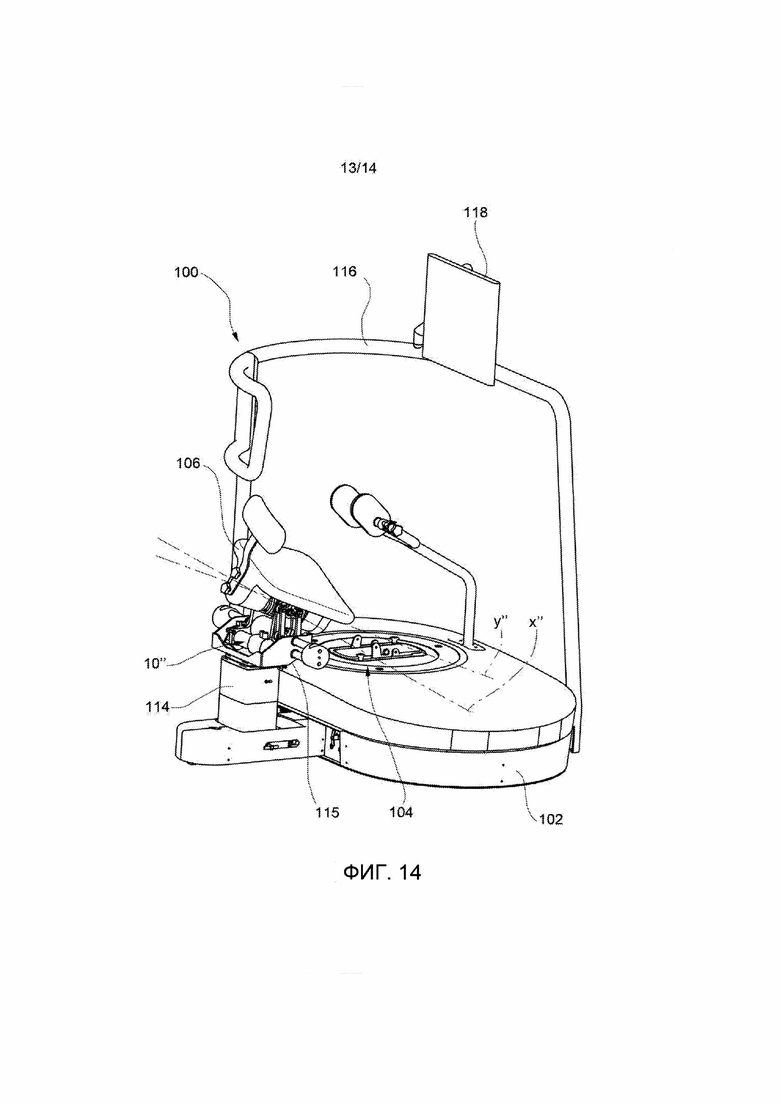
Фигура 14: дополнительный вид тренажера в перспективе, изображенного на Фигуре 7, показывающий приводную систему, соединенную с седлом; и
Фигура 15: вид в перспективе, показывающий, в увеличенном масштабе, седло тренажера, изображенного на Фигуре 7, с соответствующей приводной системой.
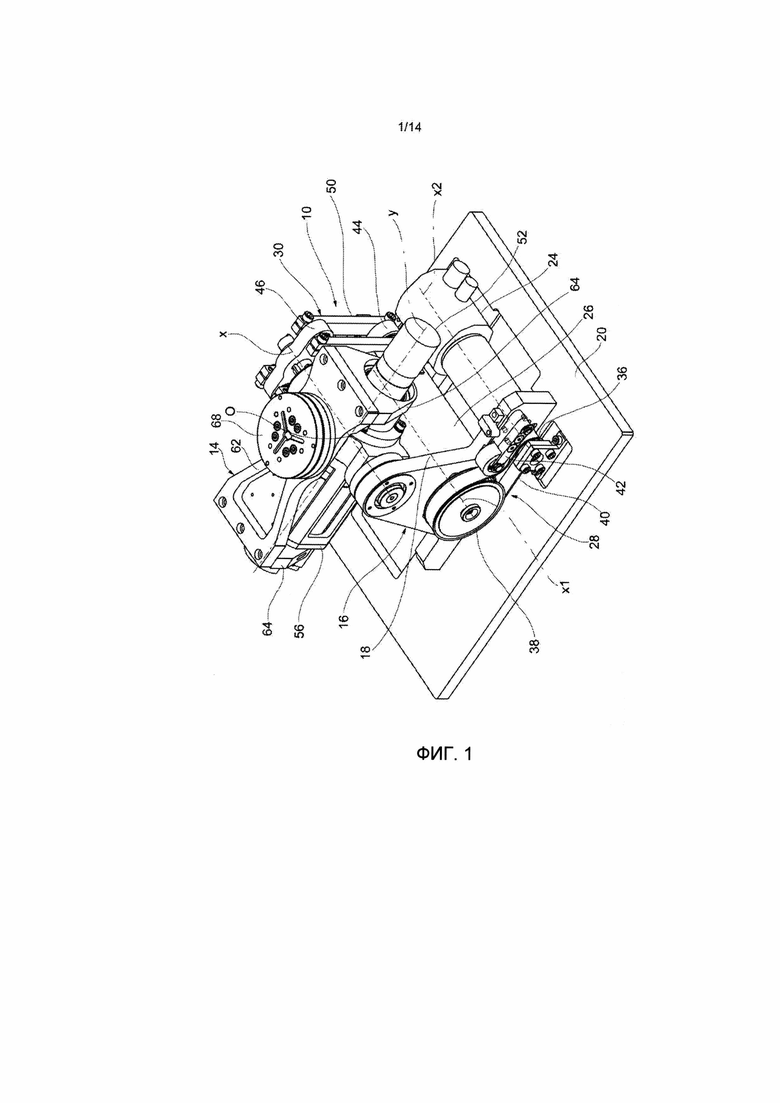
На Фигурах с 1-й по 4-ю цифрой 10 в общем представлена приводная система, управляющая перемещением объекта, каковым, в частности, является платформа реабилитационного тренажера, предназначенного для восстановления функций нижних конечностей и туловища (как будет подробно объяснено ниже со ссылкой на Фигуры с 7-й по 13-ю), обладающая двумя степенями свободы поворота относительно двух перпендикулярных друг другу и пересекающихся в центре вращения О осей вращения х и у, далее эти оси вращения именуются как первая ось вращения х и вторая ось вращения у соответственно.
Приводная система 10 в основном содержит первый приводной блок, управляющий степенью свободы вращения относительно первой оси вращения х, и второй приводной блок, управляющий степенью свободы вращения вокруг второй оси вращения у. Первый приводной блок содержит первый выходной элемент 12 и первое двигательное устройство, управляющее, за счет средств первой трансмиссии, вращением первого выходного элемента 12 относительно первой оси вращения х. Второй приводной блок содержит второй выходной элемент 14 и второе двигательное устройство, управляющее, за счет средств второй трансмиссии, вращением второго выходного элемента 14 вокруг второй оси вращения у. Второй выходной элемент 14 свободно вращается вокруг второй оси вращения у. Второе двигательное устройство соединено с возможностью передачи приводного усилия с первым выходным элементом 12 для обеспечения вращения относительно первой оси вращения х, и основанием сборочного узла, образуемого вторым двигательным устройством и первым выходным элементом 12, служит неподвижная опорная конструкция 16, вращающаяся относительно первой оси вращения х. Следовательно, под управлением первого и второго приводных блоков второй выходной элемент 14 (и, соответственно, прикрепленный к нему объект, а именно платформа реабилитационного тренажера) может одновременно поворачиваться относительно первой оси вращения х и второй оси вращения у.
Неподвижная опорная конструкция 16 содержит две вертикальные опорные пластины 18, расположенные параллельно друг другу и жестко прикрепленные к основанию 20. На каждой опорной пластине 18, в частности на ее верхнем конце, устанавливается соответствующий подшипник 22. Два подшипника 22 определяют первую ось вращения х, являющуюся неподвижной осью вращения (то есть она закреплена относительно неподвижной опорной конструкции 16) и расположенную в горизонтальной плоскости. Основанием сборочного узла, образуемого вторым двигательным устройством и первым выходным элементом 12, служит неподвижная опорная конструкция 16, вращение которой относительно первой оси вращения х обеспечивается подшипниками 22.
Помимо первого выходного элемента 12, первый приводной блок содержит электрический двигатель 24, редуктор 26, первый трансмиссионный механизм 28, соединяющий электрический двигатель 24 с редуктором 26, и второй трансмиссионный механизм 30, соединяющий редуктор 26 с первым выходным элементом 12. Редуктор 26 устанавливается между опорными пластинами 18 под первой осью вращения х. Редуктор 26 содержит входной вал 32 и выходной вал 34, вращающиеся вокруг одной оси вращения x1. Ось вращения x1 направлена параллельно первой оси вращения х и, следовательно, также располагается в горизонтальной плоскости. В предпочтительном варианте осуществления изобретения, ось вращения x1 располагается в вертикальной плоскости, проходящей через первую ось вращения х. Электрический двигатель 24 устанавливается на основание 20 неподвижной опорной конструкции 16 в непосредственной близости от редуктора 26. Электрический двигатель 24 содержит, в соответствии с известным принципом, приводной вал (не указан), ось вращения которого, обозначенная х2, направлена параллельно первой оси вращения х. Ось вращения х2, как и ось вращения x1, пролегает под первой осью вращения х. Поворотное движение приводного вала относительно оси вращения х2, генерируемое электрическим двигателем 24, передается входному валу 32 редуктора 26 посредством первого трансмиссионного механизма 28.
Как это указано, в частности, на Фигуре 1 в предложенном варианте осуществления изобретения первый трансмиссионный механизм 28 представляет собой ременный трансмиссионный механизм и главным образом содержит ведущий шкив 36, расположенный на приводном валу электрического двигателя 24 таким образом, чтобы обеспечить соединение с возможностью передачи приводного усилия необходимого для вращения, ведомый шкив 38, расположенный на входном валу 32 редуктора 26 таким образом, чтобы обеспечить соединение с возможностью передачи приводного усилия необходимого для вращения, и ремень 40, наматываемый на ведущий шкив 36 и ведомый шкив 38. В предпочтительном варианте осуществления изобретения, первый трансмиссионный механизм 28 дополнительно содержит устройство 42 натяжения цепи широко известного типа. Конструкция первого трансмиссионного механизма 28 обеспечивает первое понижения передаточного отношения, благодаря чему редуктор 26 имеет небольшие размеры. В предлагаемом варианте осуществления изобретения, диаметр ведущего шкива 36 меньше диаметра ведомого шкива 38.
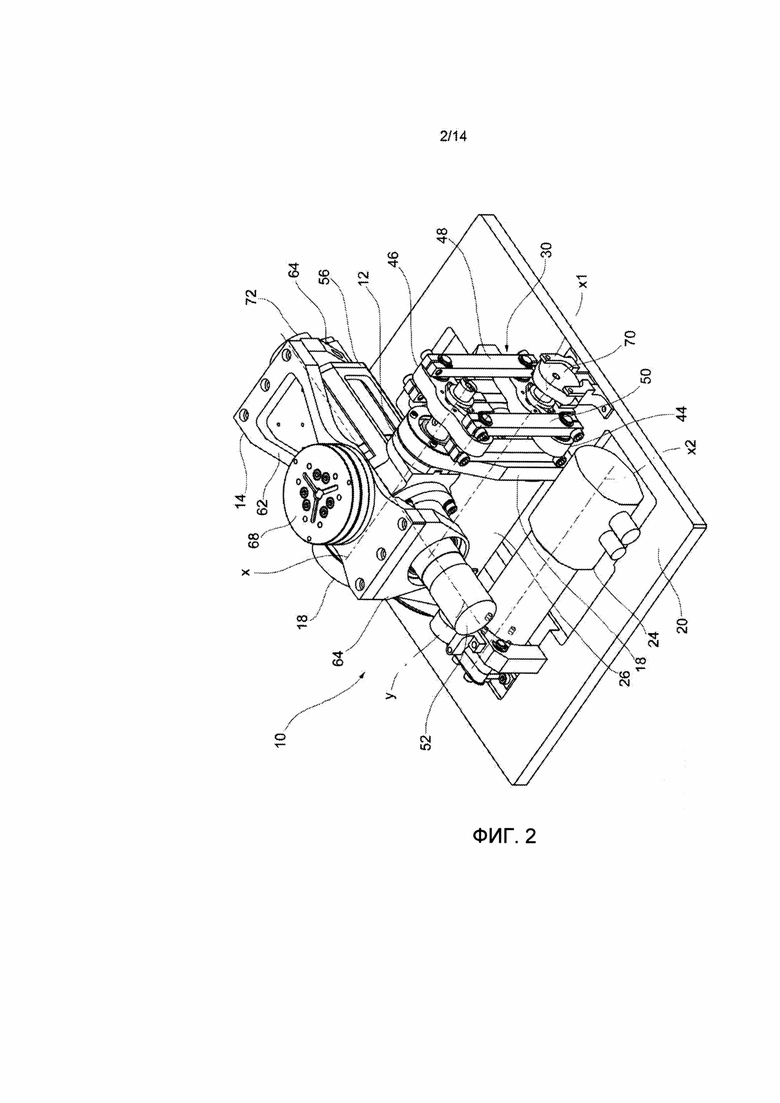
Со ссылкой, в частности, на Фигуры 2 и 6 в предлагаемом варианте осуществления изобретения второй трансмиссионный механизм 30 представляет собой параллелограммный механизм и содержит входной рычаг 44, расположенный на выходном валу 34 редуктора 26 таким образом, чтобы обеспечить соединение с возможностью передачи приводного усилия необходимого для вращения относительно оси вращения x1, выходной рычаг 46, устанавливаемый на первый выходной элемент 12 таким образом, чтобы обеспечить соединение с возможностью передачи приводного усилия необходимого для вращения относительно первой оси вращения х, два первых соединительных штока 48 (или, в соответствии с другим вариантом осуществления изобретения, один первый соединительный шток), противоположные концы которых с одной стороны шарнирно прикреплены к входному рычагу 44, а с другой стороны - к выходному рычагу 46, два вторых соединительных штока 50 (или, в соответствии с другим вариантом осуществления изобретения, один второй соединительный шток), противоположные концы которых с одной стороны шарнирно прикреплены к входному рычагу 44, а с другой стороны - к выходному рычагу 46, при этом первые и вторые соединительные штоки 48 и 50 ориентированы параллельно друг другу.
Таким образом, согласно предлагаемому варианту осуществления настоящего изобретения, поворотное движение относительно оси вращения х2, генерируемое электрическим двигателем 24, посредством первого трансмиссионного механизма 28, передаточное отношение которого в предпочтительном варианте осуществления изобретения превышает 1, передается входному валу 32 редуктора 26, затем от входного вала 32 выходному валу 34 редуктора 26 с передаточным отношением менее 1 и, в конечном итоге, от выходного вала 34 редуктора 26 первому выходному элементу 12 посредством второго трансмиссионного механизма 30, передаточное отношение которого в предпочтительном варианте осуществления изобретения равно 1.
Помимо второго выходного элемента 14, второй приводной блок содержит электрический двигатель 52 (приводной вал которого обозначен позицией 53) и редуктор 54, состыкованные вдоль второй оси вращения у. Электрический двигатель 52 и редуктор 54 устанавливаются на подвижную опорную конструкцию 56, основанием которой служит неподвижная опорная конструкция 16, обеспечивая вращение относительно первой оси вращения х и соединяемую с возможностью передачи необходимого для вращения первого выходного элемента 12 приводного усилия. Второй выходной элемент 14 удерживается на подвижной опорной конструкции 56 в частности посредством двух подшипников 58, что обеспечивает поворот относительно второй оси вращения у. Второй выходной элемент 14 соединен с возможностью передачи необходимого для поворота приводного усилия с выходным валом 60 редуктора 54. Таким образом, поворотное движение приводного вала 53 относительно второй оси вращения у, генерируемое электрическим двигателем 52, передается посредством редуктора 54, передаточное отношение которого превышает 1, второму выходному элементу 14.
В настоящем предлагаемом варианте осуществления изобретения второй выходной элемент 14 содержит установочную пластину 62, к которой перемещаемый приводной системой 10 объект может быть жестко прикреплен напрямую или опосредованно, и две боковые опорные пластины 64, располагаемые перпендикулярно установочной пластине 62, при этом каждая из боковых опорных пластин имеет соответствующее седло 66, предназначенное для установки двух подшипников 58. На установочную пластину 62 также может устанавливаться шестиосевой датчик нагрузки 68, располагаемый между перемещаемым объектом и установочной пластиной 62 для измерения силы и крутящих моментов передаваемых от приводной системы 10 перемещаемому объекту.
В предпочтительном варианте осуществления изобретения, приводная система оснащается первым датчиком 70 углового положения (Фигура 2), располагаемого таким образом, чтобы направлять сигнал, свидетельствующий об угловом положении подвижной конструкции 56 и, соответственно, второго выходного элемента 14, относительно первой оси вращения х, и вторым датчиком 72 углового положения (Фигура 4), располагаемого таким образом, чтобы направлять сигнал, свидетельствующий об угловом положении второго выходного элемента 14 относительно второй оси вращения у. Кроме того, в предпочтительном варианте осуществления изобретения электрические двигатели 24 и 52 оснащаются соответствующими датчиками углового положения известного типа (не указаны на фигурах), обеспечивающими управление с обратной связью положением и частотой оборотов двигателей и/или соответствующих тормозных устройств известного типа (не указаны на фигурах), предназначенных для блокировки второго выходного элемента 14 и, как следствие, фиксации положения перемещаемого объекта относительно первой оси вращения х и/или относительно второй оси вращения у.
Приводная система 10 разработана специально для реабилитационного тренажера, используемого для восстановления нижних конечностей и туловища, на котором пациент может выполнять упражнения активным и пассивным способом как в монопедальном, так и в бипедальном режимах.
Далее со ссылками на Фигуры с 7-й по 15-ю следует описание примера реабилитационного тренажера 100 (далее упрощенно именуемого «тренажер»), в состав которого входит приводная система 10. Тренажер 100, представленный в целом на Фигурах с 7-й по 14-ю, в основном содержит опорную конструкцию 102, платформу 104 и седло 106. Приводная система, описание которой дано выше, соединена как с платформой 104, так и с седлом 106. Приводная система, соединенная с платформой 104, обозначена 10', а две перпендикулярные оси вращения, относительно которых платформа 104 может поворачиваться под управлением приводной системы 10', обозначены х' и у'. Кроме того, приводная система, соединенная с седлом 106 обозначена 10'', а две перпендикулярные оси вращения, относительно которых седло 106 может поворачиваться под управлением приводной системы 10'', обозначены х'' и у''.
Конструкция платформы 104, подробное описание которой дано ниже, позволяет пациенту опираться на нее одной ногой при выполнении упражнений в монопедальном режиме или двумя ногами в случае выполнения упражнений в бипедальном режиме. Платформа 104 жестко прикреплена ко второму выходному элементу 14 приводной системы 10', как это показано на Фигурах 9 и 10, при этом в предпочтительном варианте осуществления изобретения между ними устанавливается шестиосевой датчик 68 нагрузки, посредством которого выполняется измерение силы и крутящих моментов, передаваемых через платформу 104 от пациента к тренажеру и от тренажера пациенту. Как это указано на Фигурах с 8-й по 10-ю, приводная система 10' вместе с входящими в нее приводными блоками полностью расположена под платформой 104. Приводная система 10', в свою очередь, устанавливается на опорную конструкцию 102.
Опорная конструкция 102, а также приводная система 10' и платформа 104 в предпочтительном варианте осуществления изобретения устанавливаются с возможностью скольжения, обеспечиваемой линейными направляющими 108 (только частично показанными на Фигурах с 7-й по 10-ю), в горизонтальном направлении х* параллельно оси вращения х' платформы 104. В предпочтительном варианте осуществления изобретения седло 106 устанавливается на салазки 110, перемещающиеся посредством скольжения по линейным направляющим 112 в горизонтальном направлении у* параллельно второй оси вращения платформы 104 и, соответственно, перпендикулярно горизонтальному направлению х*. Кроме того, в предпочтительном варианте осуществления изобретения седло 106 может регулироваться по высоте (в направлении z*) и поэтому оно может, например, устанавливаться на телескопическую опору 114, жестко прикрепляемую к салазкам 110. Согласно предлагаемому варианту осуществления настоящего изобретения положение платформы 104 относительно седла 106 может, соответственно, регулироваться в трех направлениях х*, у* и z*. Перемещение опорной конструкции 102 в направлении х* и перемещение седла 106 в направлениях у* и z* в предпочтительном варианте осуществления изобретения управляется соответствующими приводными блоками, а именно электромеханическими приводными блоками.
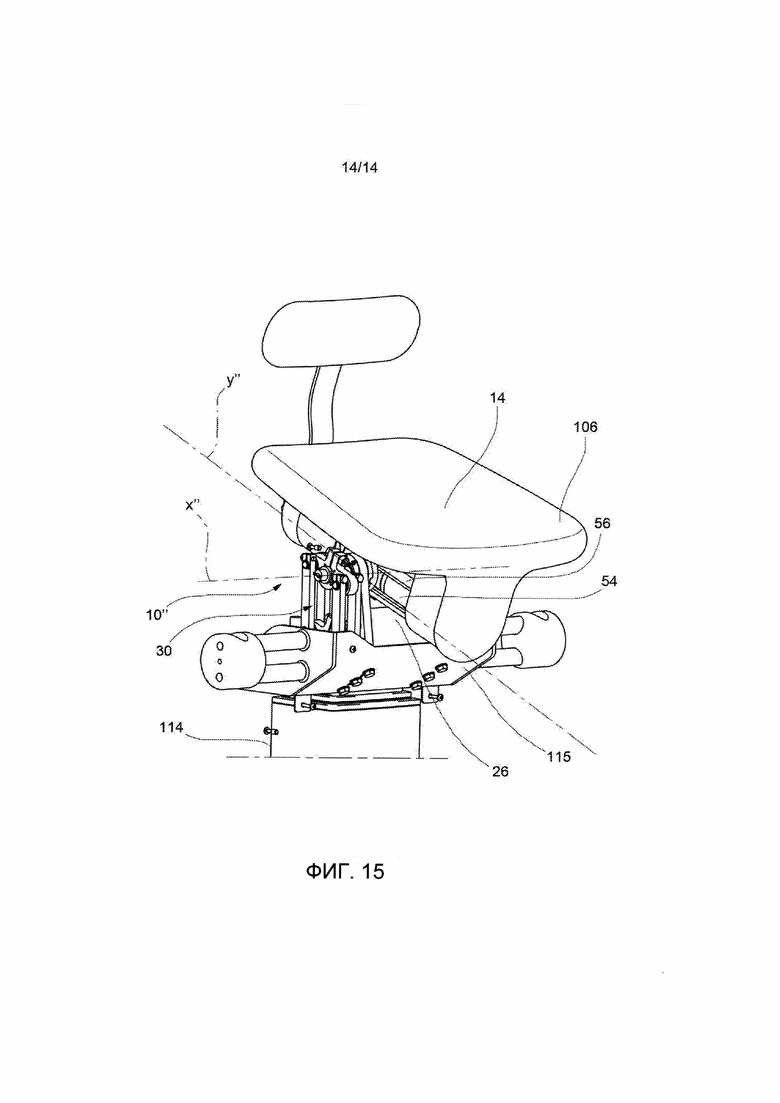
Как это показано на Фигурах 14 и 15, седло 106 жестко прикреплено ко второму выходному элементу 14 приводной системы 10'', при этом в предпочтительном варианте осуществления изобретения между ними также устанавливается шестиосевой датчик 68 нагрузки, посредством которого выполняется измерение силы и крутящих моментов, передаваемых через седло 106 от пациента тренажеру и от тренажера пациенту. Приводная система 10'' вместе с входящими в ее состав обоими приводными блоками полностью расположена под седлом 106. Приводная система 10'', в свою очередь, располагается на опорной базе 115, жестко закрепленной на верхней части опоры 114.
Электронный блок управления (не показан на фигурах) управляет работой тренажера 100, должным образом контролируя электрические двигатели 24 и 52 приводных систем 10' и 10'' и электрические двигатели (не указаны на фигурах) приводных блоков, управляющих прямолинейным перемещением в направлениях х*, у* и z*.
В предпочтительном варианте осуществления изобретения тренажер 100 дополнительно содержит опорную балку 116, устанавливаемую на опорную конструкцию 102 и предназначенную для того, чтобы пациент мог за нее ухватиться, например, при потере равновесия. В предпочтительном варианте осуществления изобретения опорная балка 116 оснащается дисплеем 118, необходимым, например, для составления программы упражнений или отображения данных или информации, предназначенной для пациента и/или физиотерапевта.
На Фигуре 8 представлен вид в разрезе тренажера 100, а именно опорной конструкции 102 с приводной системой 10' и платформой 104 в условиях, когда второй выходной элемент 14 приводной системы 10' вместе с платформой 104 повернут только относительно первой оси вращения х' на максимально допустимый угол поворота (величина которого в предпочтительном варианте осуществления изобретения составляет по меньшей мере 35°). С другой стороны, на Фигуре 9 второй выходной элемент 14 приводной системы 10' вместе с платформой 104 повернут только относительно второй оси вращения у' на максимально допустимый угол поворота (величина которого в предпочтительном варианте осуществления изобретения составляет по меньшей мере 20°). На Фигуре 10 представлен второй выходной элемент 14 приводной системы 10' вместе с платформой 104, повернутый на определенный угол относительно как первой оси вращения х', так и второй оси вращения у'.
В предпочтительном варианте осуществления изобретения для того, чтобы обеспечить возможность использования тренажера как в монопедальном, так и в бипедальном режимах, платформа 104 содержит две отделенные друг от друга части платформы, а именно первую часть 104а платформы или внутреннюю часть платформы округлой формы и вторую часть 104b платформы или внешнюю часть платформы кольцевой формы, выходящую за пределы первой части 104а платформы. Первая часть 104а платформы прикреплена посредством датчика 68 нагрузки, если таковой установлен, ко второму выходному элементу 14 приводной системы 10' и поэтому она перемещается вместе с этим элементов как единое целое. Вторая часть 104b платформы может соединяться с опорной конструкцией 102, как это показано на Фигурах 8 и 9, и поэтому она остается неподвижной, или она может соединяться с первой частью 104а платформы, как это показано на рисунке 10, и перемещаться с ней как единое целое под управлением приводной системы 10'. Для этой цели платформа 104 поставляется, например, с большим количеством соединительных устройств 120 (в настоящем предлагаемом варианте осуществления изобретения три устройства 120 расположены под углом 120°), расположенных на второй части 104b платформы, при этом каждое устройство содержит, как это подробно показано на рисунке 11, рычаг 122, свободно вращающийся вокруг соответствующей оси вращения z перпендикулярной плоскости второй части 104b платформы. Рычаг 122 каждого соединительного устройства 120 может вращаться, например, за счет шпонки (не указана на фигурах), вставляемой в паз 124 между первым положением (Фигура 7), когда рычаг 122 входит в зацеплением с соответствующим седлом 126 опорной конструкции 102, обеспечивая соединение второй части 104b платформы с опорной конструкцией 102, и вторым положением (не указано на фигурах), когда рычаг 122 выходит из зацепления с соответствующим седлом 126 опорной конструкции 102 и входит в зацепление с соответствующим седлом 128 первой части 104а платформы, обеспечивая соединение второй части 104b платформы с первой частью 104а платформ. В предпочтительном варианте осуществления изобретения диаметр первой части 104а платформы не превышает 40 см, благодаря чему одна нога пациента может опираться на платформу, сохраняя естественное положение, при этом вторая ноги опирается на неподвижную поверхность опорной конструкции. В предпочтительном варианте осуществления изобретения диаметр второй части 104b платформы превышает 50 см, составляя, например, 55 см, благодаря чему одна нога пациента может опираться на платформу, сохраняя естественное положение.
В предпочтительном варианте осуществления изобретения платформа 104 дополнительно содержит первый боковой кожух 130а, расположенный по всей длине периметра первой части 104а платформы, и второй боковой кожух 130b, расположенные по всей длине периметра второй части 104b платформа.
Преимуществом конструкции первой части 104а платформы является возможность ее использования как для восстановления пяточной части стопы, так и для выполнения упражнений в монопедальном режиме. При выполнении упражнений, нацеленных на восстановление пяточной части стопы, нога пациента должна быть жестко зафиксирована на первой части 104а платформы таким образом, чтобы ось сгибания/распрямления пятки совпадала с первой осью вращения х' приводной системы 10', а ось эверсии/инверсии пятки совпадала со второй осью вращения у' приводной системы 10'. Для этого первая часть 104а платформы оснащается устанавливаемой на нее, как это показано на Фигурах 12а и 12b, опорной подставкой 132 для ноги с элементами крепления 134, обеспечивающими фиксацию ноги пациента на подставке 132 и, следовательно, на первой части 104а платформы. В предпочтительном варианте осуществления изобретения для обеспечения правильной ориентации подставки 132 относительно первой части 104а платформы и, следовательно, относительно двух осей вращения х' и у' приводной системы 10' увеличена длина седла 136 вдоль второй оси вращения у', при этом его форма соответствует подставке 132. Для выполнения упражнений в монопедальном режиме с другой стороны используется подставка 132' без элементов крепления; упомянутая пластина один раз вставляется в седло 136 первой части 104а платформы, образуя в сочетании с этой частью платформы плоскую опорную поверхность для ноги пациента, как это показано на Фигурах 13а и 13b.
С учетом представленного выше описания преимущества, достигаемые при использовании приводной системы согласно изобретению и реабилитационного тренажера, в состав которого входит такого типа приводная система, являются очевидными.
В соответствии с настоящим изобретением приводная система полностью располагается под вторым выходным элементом и, следовательно, под перемещаемым объектом, так как этот объект жестко прикреплен ко второму выходному элементу. Это позволяет обеспечить широкие диапазоны углового перемещения относительно двух осей вращения, соответствующие физиологическим угловым диапазонам поворота сустава пяточной части стопы. При этом приводная система согласно изобретению очень компактная, в частности это касается высотного размера, благодаря чему для подъема пациента на платформу не требуется установка ни лестницы, ни опорного основания.
Реабилитационный тренажер, в состав которого входит приводная система согласно изобретению, может использоваться для восстановления не только пяточной части стопы, но и всех остальных суставов нижних конечностей, а также для восстановления мышц позвоночника, тренировки равновесия и устойчивости тела. В действительности тренажер предназначен для выполнения упражнений как в положении сидя, так и положении стоя с опорой только на одну ногу или на обе ноги. Тренажер обеспечивает как активный способ выполнения упражнений, когда пациент активно выполняет требуемые движения, так и пассивный, когда тренажер воздействует на пациента, заставляя его/ее выполнять требуемые движения; также тренажер может функционировать в ассистивном режиме, когда тренажер помогает пациенту выполнять требуемые движения, если пациент не может выполнить их самостоятельно. Таким образом, все упражнения, указанные в реабилитационных протоколах, могут выполняться с использованием одного тренажера.
В частности, тренажер позволяет выполнять упражнения, нацеленные на восстановление пяточной части стопы, как в положении сидя, так и в положении стоя. В положении сидя тренажер позволяет выполнять упражнения для пассивной мобилизации сустава пяточной части стопы с предварительно определенным диапазоном угловых перемещений, упражнения для активной мобилизации сустава пяточной части стопы, упражнения для ассистивной мобилизации сустава пяточной части стопы, а также изометрические, изотонические и изокинетические упражнения. Конструкция тренажера позволяет выполнять упражнения с различными уровнями сопротивления с применением как сопротивления эластичного типа, так и гидродинамического сопротивления. В положении стоя пациент может опираться на платформу только одной ногой и выполнять как проприоцептивные упражнения, так и укрепляющие упражнения по аналогии с упражнениями, выполняемыми в положении сидя.
Кроме того, с помощью тренажера осуществляется лечение нижних конечностей в положении стоя как в монопедальном, так и в бипедальном режимах. В частности, посредством приводной системы платформа тренажера может перемещаться с различными уровнями сопротивления, например, для выполнения изотонических упражнений для нижних конечностей или проприоцептивных упражнений. Также пациент может активно двигать платформу тренажера для ее приведения обратно в положение равновесия от заданного первоначального положения, назначаемого приводной системой.
Также на тренажере можно выполнять упражнения на устойчивость тела и восстановление мышц позвоночника в монопедальном и в бипедальном режимах как в положении стоя, так и в положении сидя. В этом случае также представляется возможным лечить пациента как активным, так и пассивным способом, обеспечивая выбор уровня сопротивления, а также скорости и величины хода седла. В активном режиме пациент может перемещать платформу с различными уровнями сопротивления, выполняя проприоцептивные упражнения и тренируя контроль за его/ее движениями. В пассивном режиме перемещением платформы управляет приводная система, что позволяет выполнять упражнения по пассивной мобилизации суставов таза и упражнения, укрепляющие мышцы туловища.
С помощью тренажера также можно тренировать устойчивость и равновесие пациента в положении стоя с опорой на платформу обеими ногами.
С помощью датчиков положения, связанных с двумя осями поворота платформы, и датчика нагрузки, устанавливаемому между вторым выходным элементом и платформой, тренажер измеряет величину смещения и скорость платформы, а также силу и крутящие моменты, передаваемые от пациента платформе и от платформы пациенту, обеспечивая поступление к физиотерапевту объективной и полной информации о фактических результатах пациента с целью, например, составления реабилитационной программы и отслеживания хода выполнения упомянутой программы.
Разумеется, не изменяя принцип настоящего изобретения, варианты осуществления изобретения и детали конструкции могут значительно отличаться от таковых, описанных и изображенных исключительно в виде неограничивающего примера, не выходя при этом за пределы объема изобретения, определяемого в прилагаемой формуле изобретения.
Группа изобретений включает приводную систему для управления платформой и седлом реабилитационного тренажера для восстановления конечностей и туловища и реабилитационный тренажер, относится к области медицинской техники и предназначена для использования при лечении патологий нижних конечностей и позвоночного столба. Приводная система, предназначена для управления поворотом объекта относительно двух перпендикулярных осей вращения. Реабилитационный тренажер, в состав которого входит такого типа приводная система, предназначен для восстановления нижних конечностей и туловища. Приводная система (10) содержит: первую неподвижную опорную конструкцию (16); вторую подвижную опорную конструкцию (56), устанавливаемую на первую опорную конструкцию (16) для обеспечения вращения вокруг неподвижной оси вращения (х); первый приводной блок (12, 24, 26, 28, 30), оснащаемый первым двигательным устройством (24), первым выходным элементом (12) и средствами первой трансмиссии (26, 28, 30); второй приводной блок (14, 52, 53, 54), оснащаемый вторым двигательным устройством (52, 53), вторым выходным элементом (14) и средствами второй трансмиссии (54). Первый приводной элемент (12) соединен с возможностью передачи приводного усилия второй опорной конструкции (56) для обеспечения вращения относительно первой оси вращения (х). Первое двигательное устройство (24) управляет вращением первого выходного элемента (12) вместе со второй опорной конструкцией (56) относительно первой оси вращения (х) и содержит первый двигатель (24) и первый приводной вал, на который передается приводное усилие первого двигателя (24), обеспечивающее вращение относительно оси первого двигателя (х2). Второй выходной элемент (14) устанавливается на вторую опорную конструкцию (56) для обеспечения вращения вокруг второй оси вращения (у). Второе двигательное устройство (52, 53) управляет вращением второго выходного элемента (14) вокруг второй оси вращения (у) и содержит второй двигатель (52) и второй приводной вал (53), на который передается приводное усилие второго двигателя (52), обеспечивающее вращение относительно оси второго двигателя (у). Второй приводной блок (14, 52, 53, 54) устанавливается на вторую опорную конструкцию (56) и соединяется с ней с возможность передачи приводного усилия, обеспечивая вращение относительно первой оси вращения (х). Перемещаемый объект (104), жестко прикрепленный ко второму выходному элементу (14), может свободно вращаться относительно первой оси вращения (х) под управлением первого приводного блока (12, 24, 26, 28, 30) и вокруг второй оси вращения (у) под управлением второго приводного блока (14, 52, 53, 54). Ось (х2) первого двигателя пролегает параллельно и на удалении от первой оси вращения (х), тогда как ось (у) второго двигателя совпадает со второй осью вращения (у). Изобретения позволяют пациенту выполнять лечебные упражнения как в выпрямленном положении стоя, так и в положении сидя одновременно активным и пассивным способом и с возможностью управления степенью восстановления посредством измерения биомеханических и функциональных параметров. 2 н. и 6 з.п. ф-лы, 15 ил.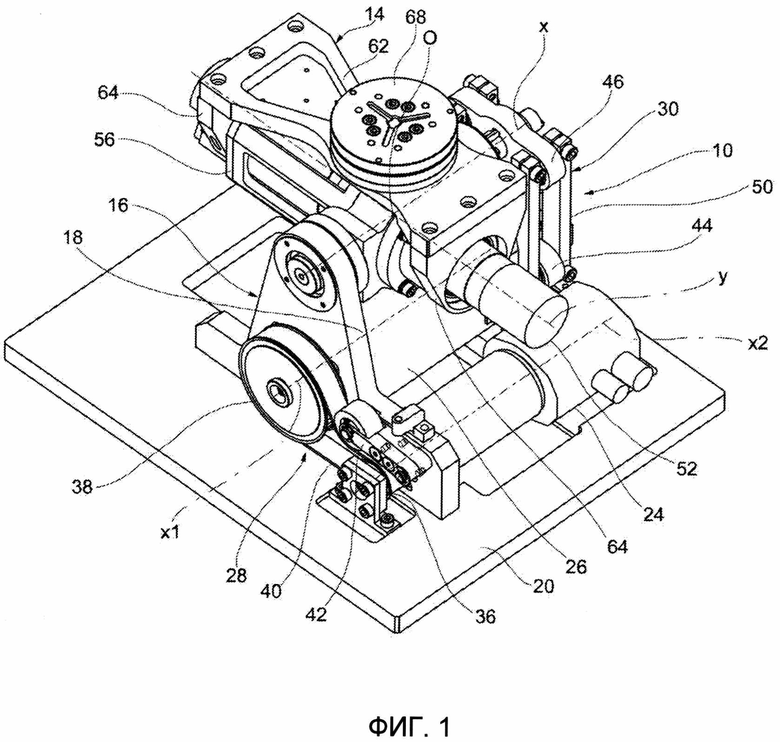
1. Приводная система (10) для управления платформой и седлом реабилитационного тренажера для восстановления конечностей и туловища с двумя степенями свободы вращения относительно первой оси вращения (х) и второй оси вращения (у), при этом упомянутые первая и вторая оси вращения (х, у) перпендикулярны друг другу и пересекаются в заданной точке пересечения (О),
приводная система (10), содержащая первую неподвижную опорную конструкцию (16), вторую подвижную опорную конструкцию (56), обеспечивающую вращение первой опорной конструкции (16) вокруг неподвижной оси вращения, соответствующей упомянутой первой оси вращения (х), первый приводной блок (12, 24, 26, 28, 30) с первым двигательным устройством (24), первый выходной элемент (12) и средство первой трансмиссии (26, 28, 30), а также второй приводной блок (14, 52, 53, 54) со вторым двигательным устройством (52, 53), второй выходной элемент (14) и средство второй трансмиссии (54),
при этом первый выходной элемент (12) соединен со второй опорной конструкцией (56) с возможностью передачи приводного усилия, необходимого для вращения относительно первой оси вращения (х),
при этом первое двигательное устройство (24) выполнено с возможностью управления посредством упомянутых средств первой трансмиссии (26, 28, 30) вращением первого выходного элемента (12) вместе со второй опорной конструкцией (56) относительно первой оси вращения (х) и содержит первый двигатель (24) и первый приводной вал, предназначенный для приведения в действие первым двигателем (24) с целью поворота относительно оси первого двигателя (х2),
при этом второй выходной элемент (14) удерживается второй опорной конструкцией (56) для поворота относительно оси вращения, соответствующей упомянутой второй оси вращения (у),
при этом второе двигательное устройство (52, 53) предназначено для управления посредством упомянутого второго средства трансмиссии (54) поворотом второго выходного элемента (14) относительно второй оси вращения (у) и содержит второй двигатель (52) и второй приводной вал (53), предназначенный для приведения в действие вторым двигателем (52) с целью поворота относительно оси второго двигателя (у), и
при этом второй приводной блок (14, 52, 53, 54) удерживается второй опорной конструкцией (56) таким образом, чтобы обеспечить соединение с упомянутой конструкцией с возможностью передачи приводного усилия, необходимого для поворота относительно первой оси вращения (х),
в силу чего перемещаемый объект (104), жестко прикрепленный ко второму выходному элементу (14), может свободно вращаться относительно первой оси вращения (х) под управлением первого приводного блока (12, 24, 26, 28, 30) и вокруг второй оси вращения (у) под управлением второго приводного блока (14, 52, 53, 54), отличающаяся тем, что ось первого двигателя (х2) располагается параллельно и на удалении от первой оси вращения (х), а также тем, что ось второго двигателя (у) совпадает со второй осью вращения (у).
2. Приводная система по п. 1, в которой первая ось вращения (х) ориентирована горизонтально, а ось первого двигателя (х2) располагается под первой осью вращения (х) на удалении от вертикальной плоскости, проходящей через первую ось вращения (х).
3. Приводная система по п. 2, в которой упомянутое средство первой трансмиссии (26, 28, 30) содержит первый редуктор (26), состоящий из входного вала (32) и выходного вала (34), вращающихся вокруг одной оси вращения (x1), пролегающей под первой осью вращения (х), первый трансмиссионный механизм (28), функционально расположенный между первым двигателем (24) и редуктором (26) и предназначенный для передачи входному валу (32) редуктора (26) поворотного движения первого приводного вала, генерируемого первым двигателем (24), и второй трансмиссионный механизм (30), функционально расположенный между редуктором (26) и первым выходным элементом (12) и предназначенный для передачи первому выходному элементу (12) поворотного движения выходного вала (34) редуктора (26).
4. Приводная система по п. 1, в которой упомянутое средство второй трансмиссии (54) содержит редуктор (54), расположенный соосно второму двигателю (52).
5. Реабилитационный тренажер (100), предназначенный для восстановления нижних конечностей и туловища пациента и содержащий опорную конструкцию (102), платформу (104), устанавливаемую на опорную конструкцию (102) и выполненную таким образом, чтобы пациент мог опираться на нее одной или двумя ногами, седло (106), первую приводную систему (10') по любому из предшествующих пунктов формулы изобретения, управляющую перемещением платформы (104) с двумя степенями свободы вращения относительно двух перпендикулярных осей вращения (х', у'), вторую приводную систему (10'') по любому из предшествующих пунктов формулы изобретения, управляющую перемещением седла (106) с двумя степенями свободы вращения относительно двух перпендикулярных осей вращения (х'', у''), и блок, управляющий первой и второй приводными системами (10', 10''), обеспечивая перемещение платформы (104) и седла (106) согласно предварительно заданным режимам работы.
6. Реабилитационный тренажер по п. 5, дополнительно содержащий средство линейного перемещения седла (106) относительно опорной конструкции (102) и, следовательно, относительно платформы (104) вдоль трех перпендикулярных направлений (х*, у*, z*).
7. Реабилитационный тренажер по п. 5, в котором платформа (104) содержит первую часть 104а платформы, соединенную со вторым выходным элементом (14) приводной системы (10), вторую часть 104b платформы, сонаправленную первой части 104а платформы и отделенную от нее средством блокировки (120), выполняющим функцию выборочного соединения второй части 104b платформы с опорной конструкцией (102) или с первой частью 104а платформы.
8. Реабилитационный тренажер по п. 5, дополнительно содержащий датчики (68) измерения силы и/или крутящего момента, расположенные между вторым выходным элементом (14) первой приводной системы (10') и платформой (104), а также между вторым выходным элементом (14) второй приводной системы (10'') и седлом (106) и предназначенные для направления сигналов, указывающих величину силы и величину крутящих моментов, передаваемых от пациента первой приводной системе (10') и от первой приводной системы (10') пациенту через платформу (104), а также передаваемых пациентом второй приводной системе (10'') и второй приводной системой (10'') пациенту через седло (106).
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| US 6878102 B1, 12.04.2005 | |||
| CN 101006958 A, 01.08.2007 | |||
| Способ высушивания кровяной плазмы | 1959 |
|
SU123668A1 |

