Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу отслеживания объектов и к устройству отслеживания объектов.
Уровень техники
[0002] Известны устройства обнаружения пешеходов для того, чтобы обнаруживать состояния присутствия или отсутствия пешеходов, которые ожидают перехода через дорогу или в данный момент переходят через дорогу (см. патентный документ 1). Устройство обнаружения пешеходов, раскрытое в патентном документе 1, обнаруживает пешеходов, присутствующих около перекрестка, с использованием стереокамеры и обновляет таблицу управления пешеходами в соответствии с результатами отслеживания пешеходов, полученными посредством координат для отслеживания, указывающих присутствие каждого пешехода во временных рядах.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Не прошедшая экспертизу патентная публикация (Япония) № 2002-024986
Сущность изобретения
[0004] Когда присутствует большое число пешеходов, объем данных, обрабатываемых во временных рядах, увеличивается, что может увеличивать рабочую нагрузку устройства при вычислении.
[0005] С учетом вышеизложенной проблемы, настоящее изобретение предоставляет способ отслеживания объектов и устройство отслеживания объектов с уменьшенной рабочей нагрузкой при вычислении при отслеживании множества объектов во временных рядах.
Решение задачи
[0006] Способ отслеживания объектов согласно аспекту настоящего изобретения сортирует, когда множество объектов обнаруживаются, объекты в группы в соответствии со степенью влияния позиционной взаимосвязи между рассматриваемым транспортным средством и объектами на перемещение рассматриваемого транспортного средства и отслеживает каждую из групп в качестве отдельного объекта во временных рядах.
Преимущества изобретения
[0007] Способ отслеживания объектов согласно аспекту настоящего изобретения может уменьшать рабочую нагрузку при вычислении при отслеживании множества объектов во временных рядах.
Краткое описание чертежей
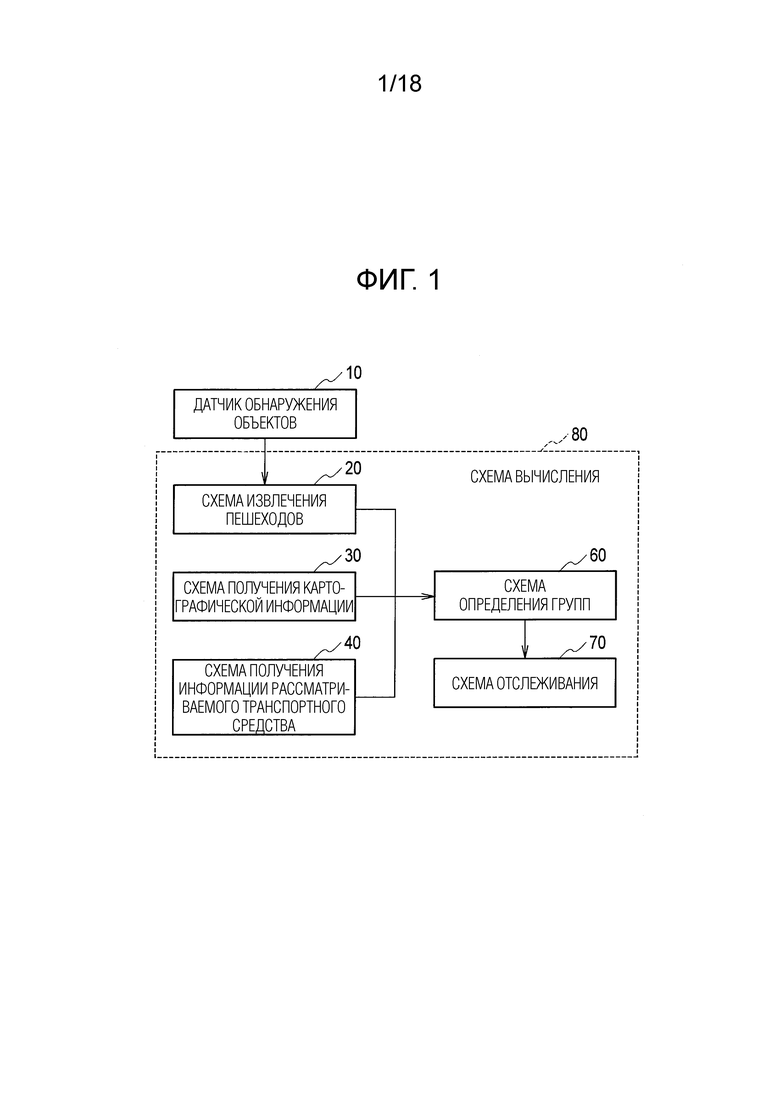
[0008] Фиг. 1 является блок-схемой, показывающей конфигурацию устройства отслеживания объектов согласно варианту осуществления.
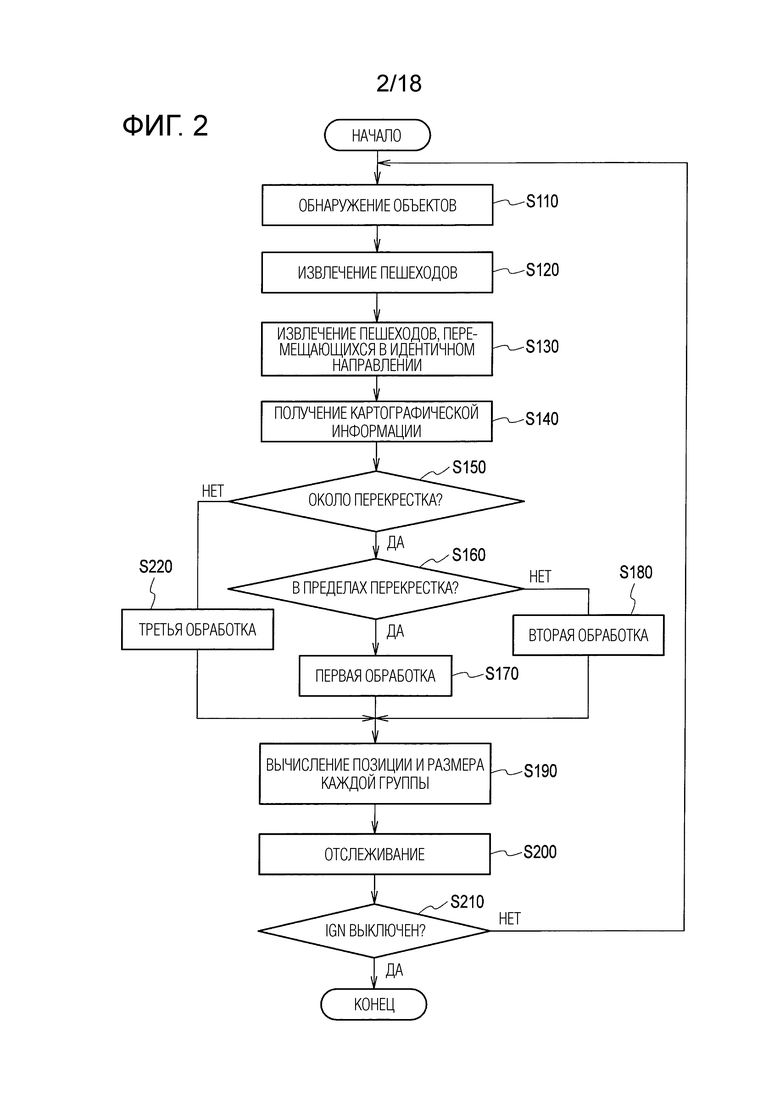
Фиг. 2 является блок-схемой последовательности операций, иллюстрирующей способ отслеживания объектов с использованием устройства отслеживания объектов, показанного на фиг. 1.
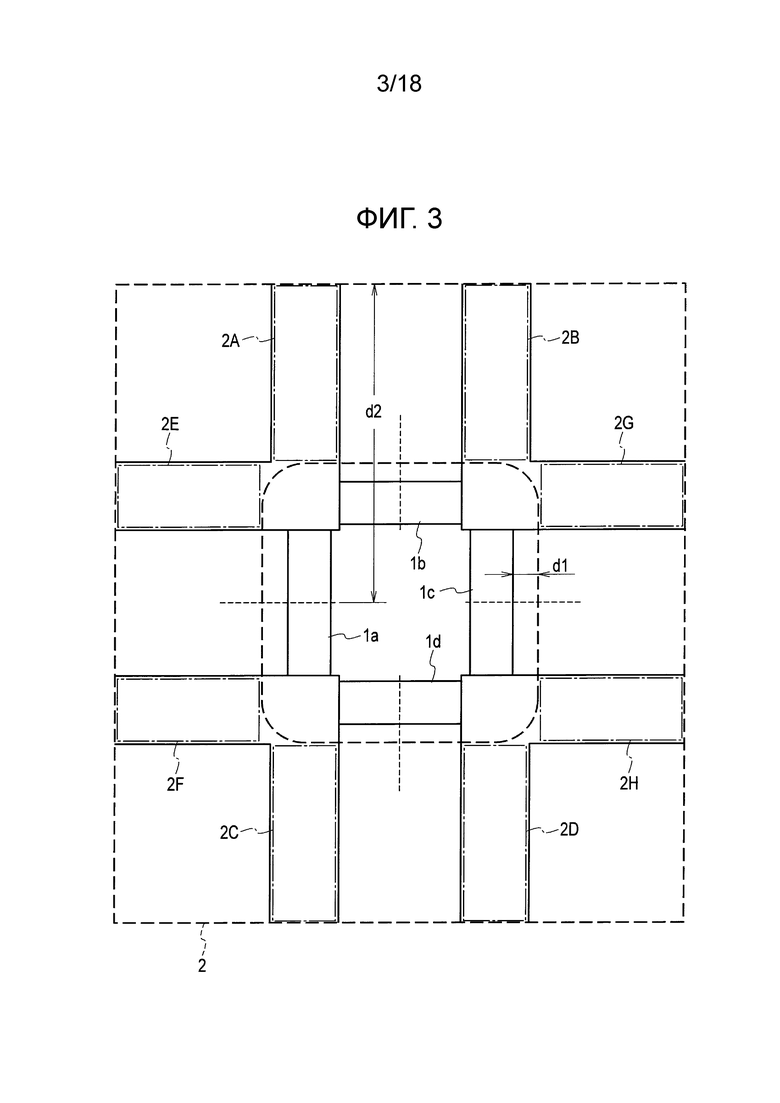
Фиг. 3 является видом сверху, показывающим перекресток четырех дорог.
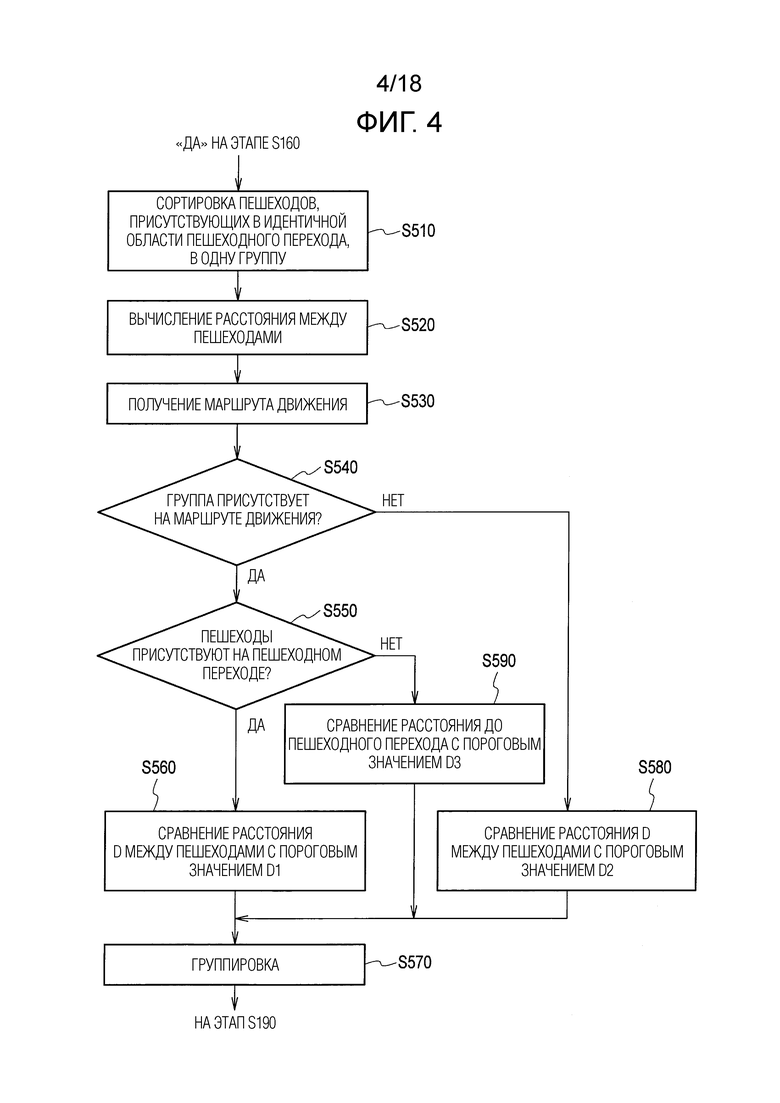
Фиг. 4 является блок-схемой последовательности операций способа, показывающей конкретные этапы первой обработки (этап S170) на фиг. 2.
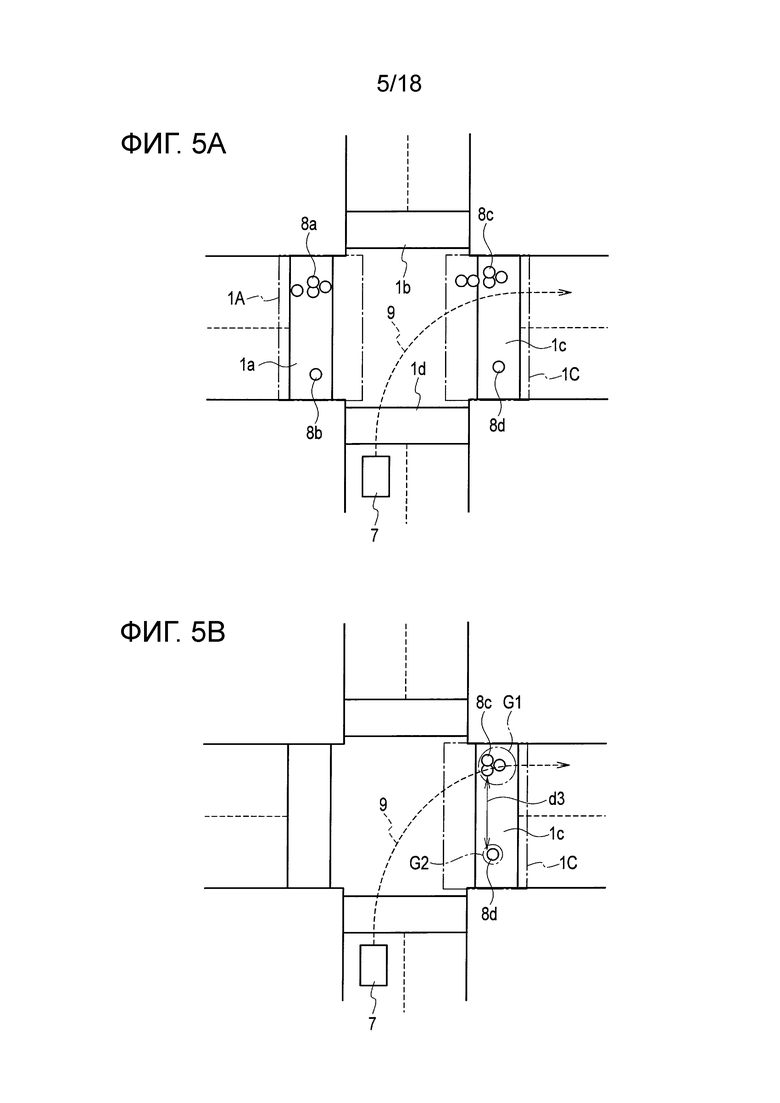
Фиг. 5A является видом для описания первой обработки, показывающим пешеходов 8a-8d, присутствующих на перекрестке.
Фиг. 5B является видом для описания первой обработки, показывающим пешеходов 8c и 8d, присутствующих на маршруте 9 движения.
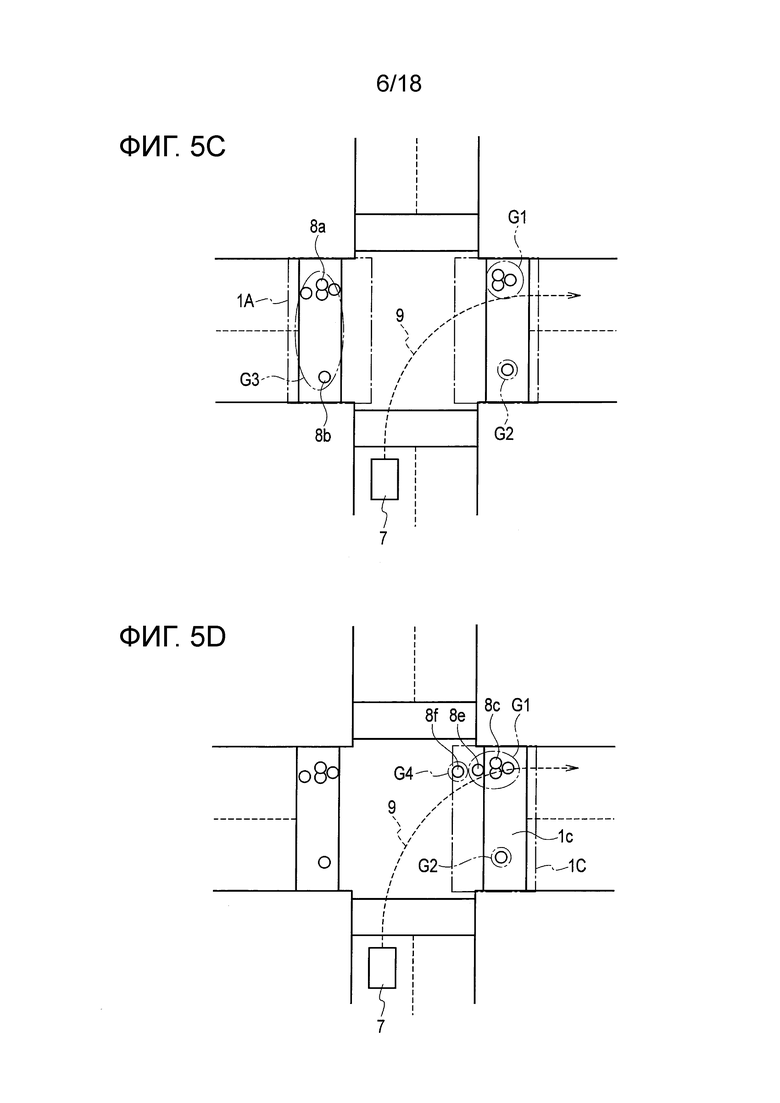
Фиг. 5C является видом для описания первой обработки, показывающим пешеходов 8a и 8b, не присутствующих на маршруте 9 движения.
Фиг. 5D является видом для описания первой обработки, показывающим пешеходов 8e и 8f, не присутствующих на пешеходном переходе 1c.
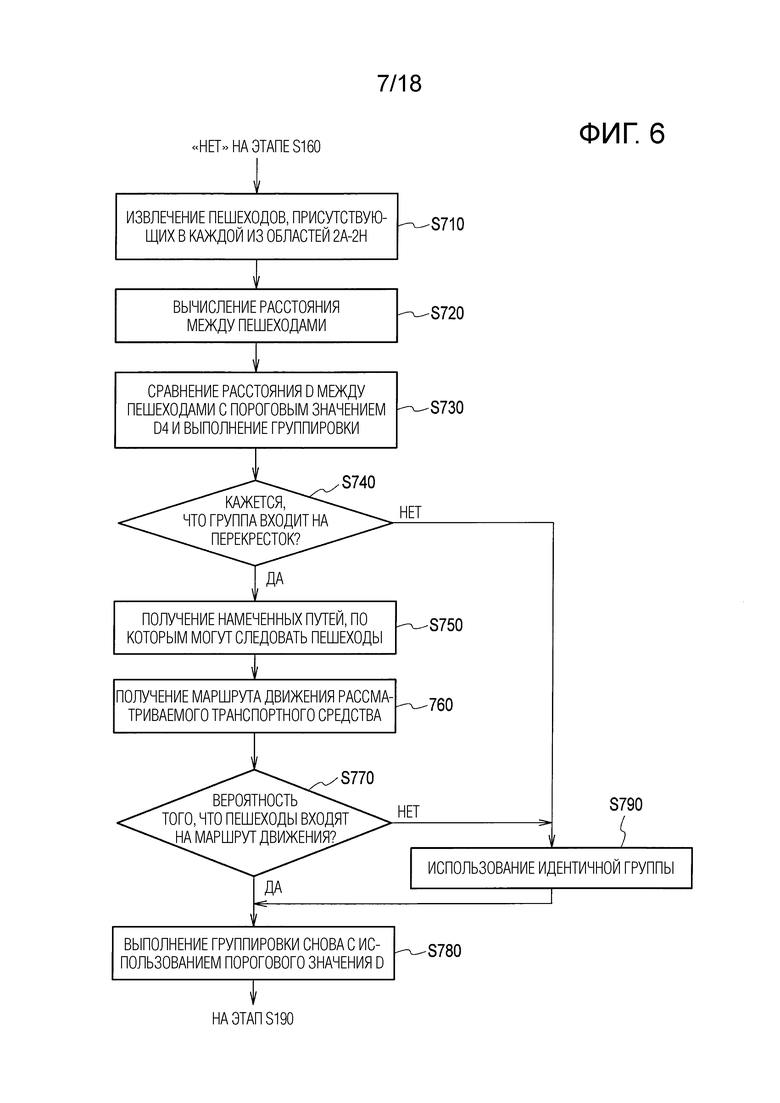
Фиг. 6 является блок-схемой последовательности операций способа, показывающей конкретные этапы второй обработки (этап S180) на фиг. 2.
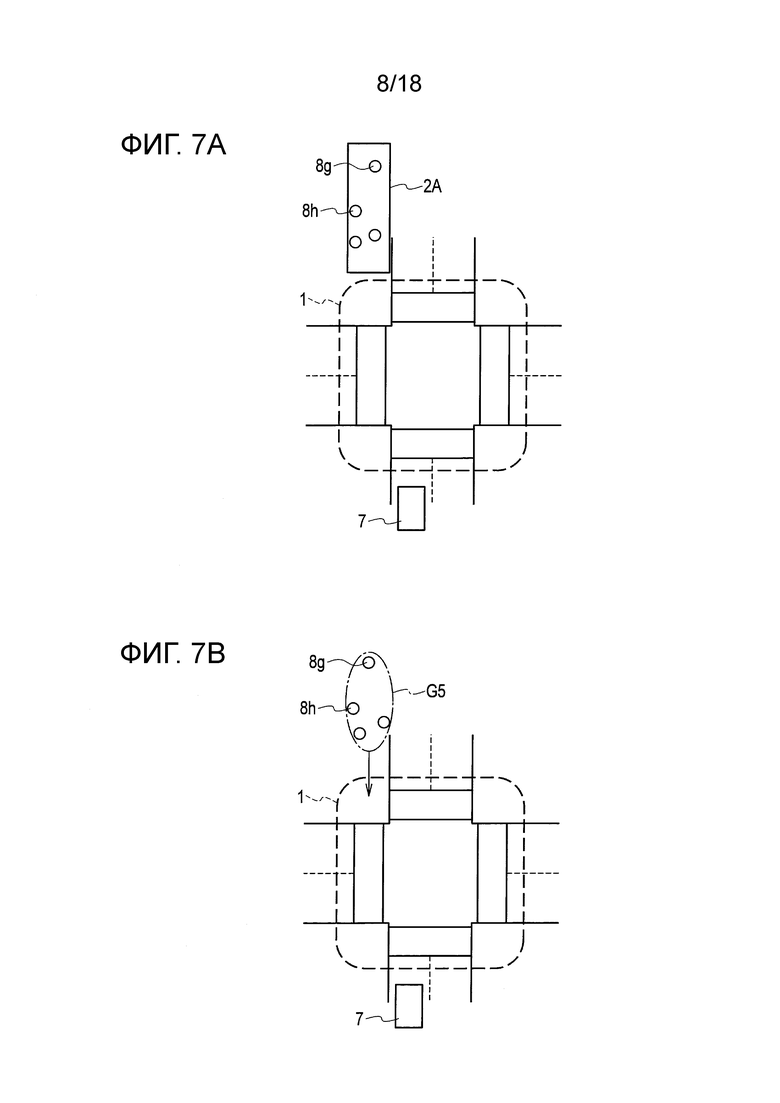
Фиг. 7A является видом для описания второй обработки, показывающим пешеходов 8g и 8h, присутствующих в области 2A тротуара.
Фиг. 7B является видом для описания второй обработки, показывающим направление перемещения пешеходов 8g и 8h, присутствующих в области 2A тротуара.
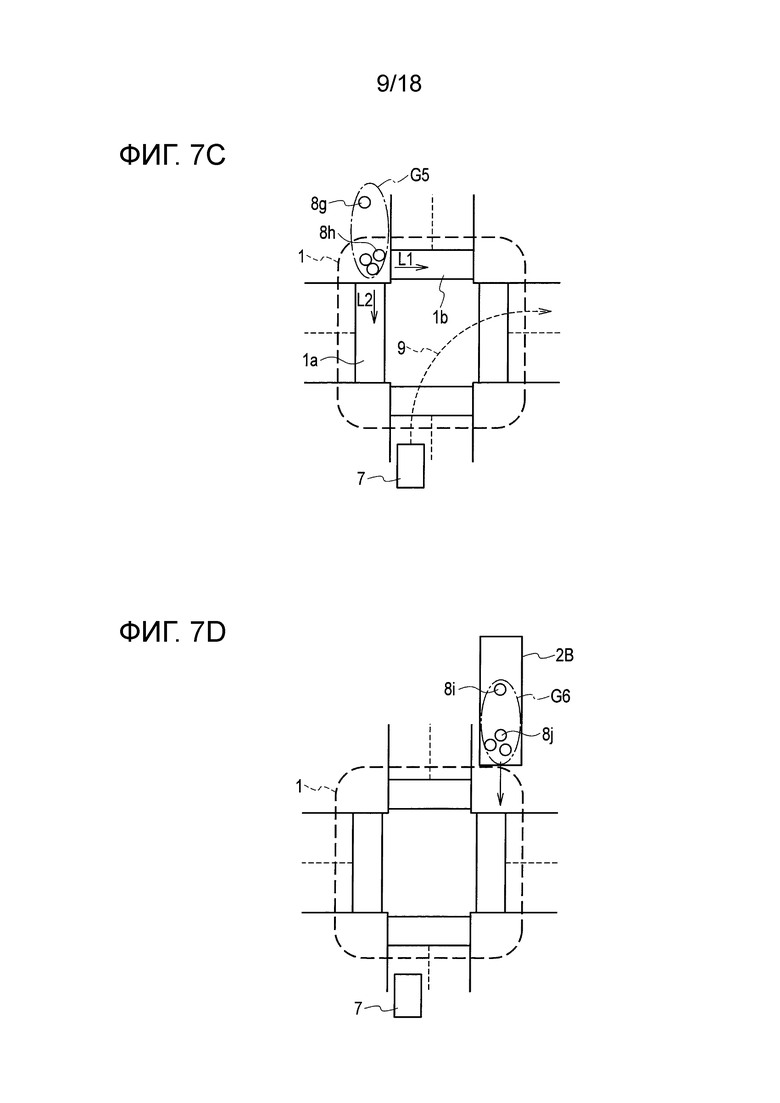
Фиг. 7C является видом для описания второй обработки, показывающим намеченные пути L1 и L2, по которым могут следовать пешеходы 8g и 8h.
Фиг. 7D является видом для описания второй обработки, показывающим направление перемещения пешеходов 8i и 8j, присутствующих в области 2B тротуара.
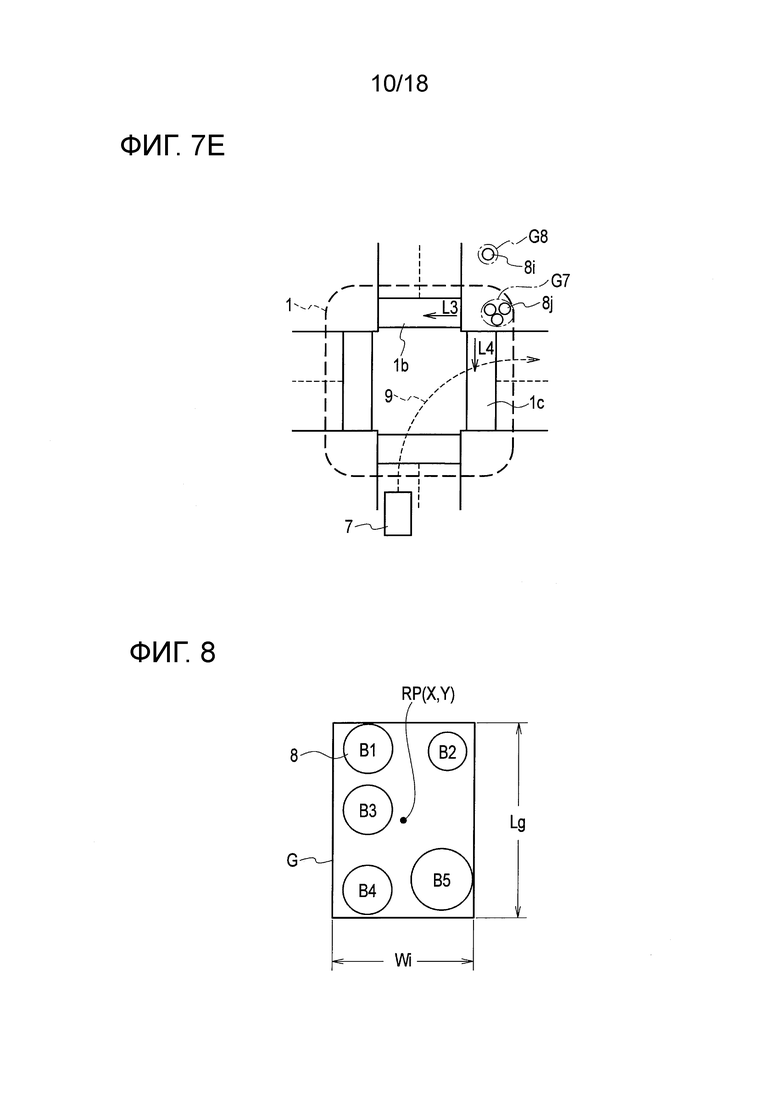
Фиг. 7E является видом для описания второй обработки, показывающим намеченные пути L3 и L4, по которым могут следовать пешеходы 8i и 8j.
Фиг. 8 является схематичным видом, показывающим характерную позицию RP и размер группы G.
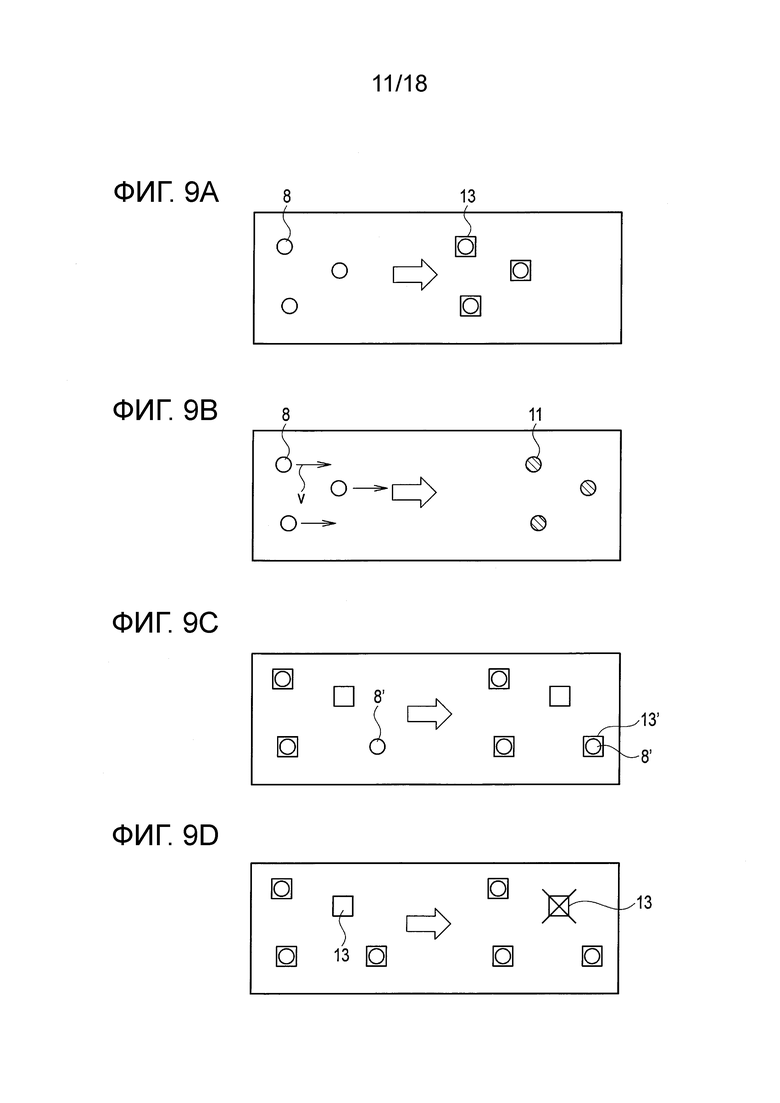
Фиг. 9A является схематичным видом, показывающим обработку отслеживания объектов, выполняемую только в первом кадре.
Фиг. 9B является схематичным видом, показывающим обработку отслеживания объектов для прогнозирования позиций пешеходов, указываемых посредством меток 13 для отслеживания.
Фиг. 9C является схематичным видом, показывающим обработку отслеживания объектов для нового формирования метки 13' для отслеживания.
Фиг. 9D является схематичным видом, показывающим обработку отслеживания объектов для удаления метки 13 для отслеживания.
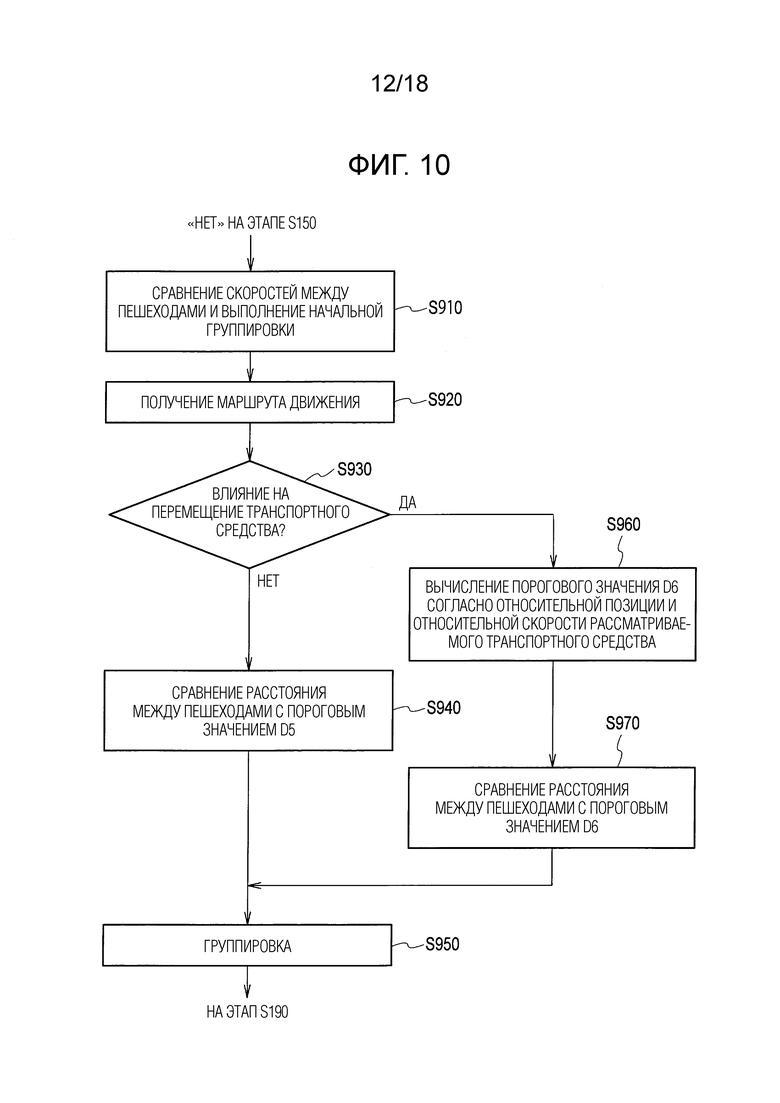
Фиг. 10 является блок-схемой последовательности операций способа, показывающей конкретные этапы третьей обработки (этап S220) на фиг. 2.
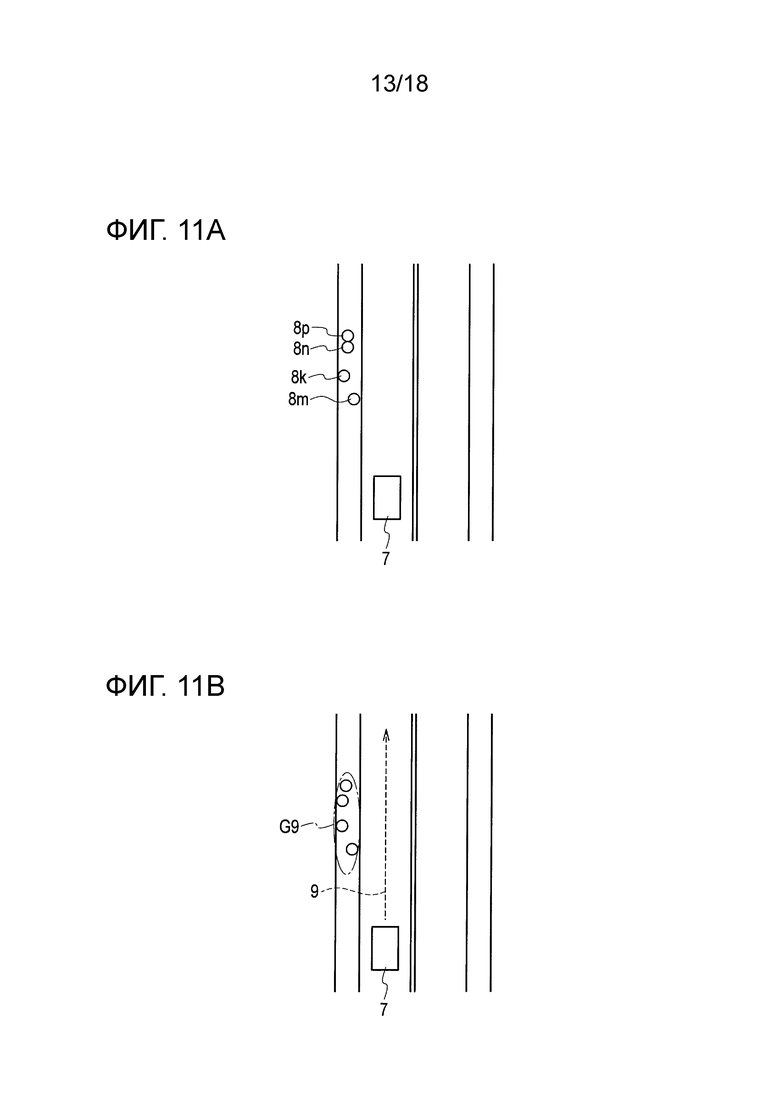
Фиг. 11A является видом сверху, показывающим четырех пешеходов 8k, 8m, 8n и 8p, перемещающихся на тротуаре в идентичном направлении.
Фиг. 11B является видом сверху, показывающим пример отсортировки четырех пешеходов 8k, 8m, 8n и 8p в группу G9.
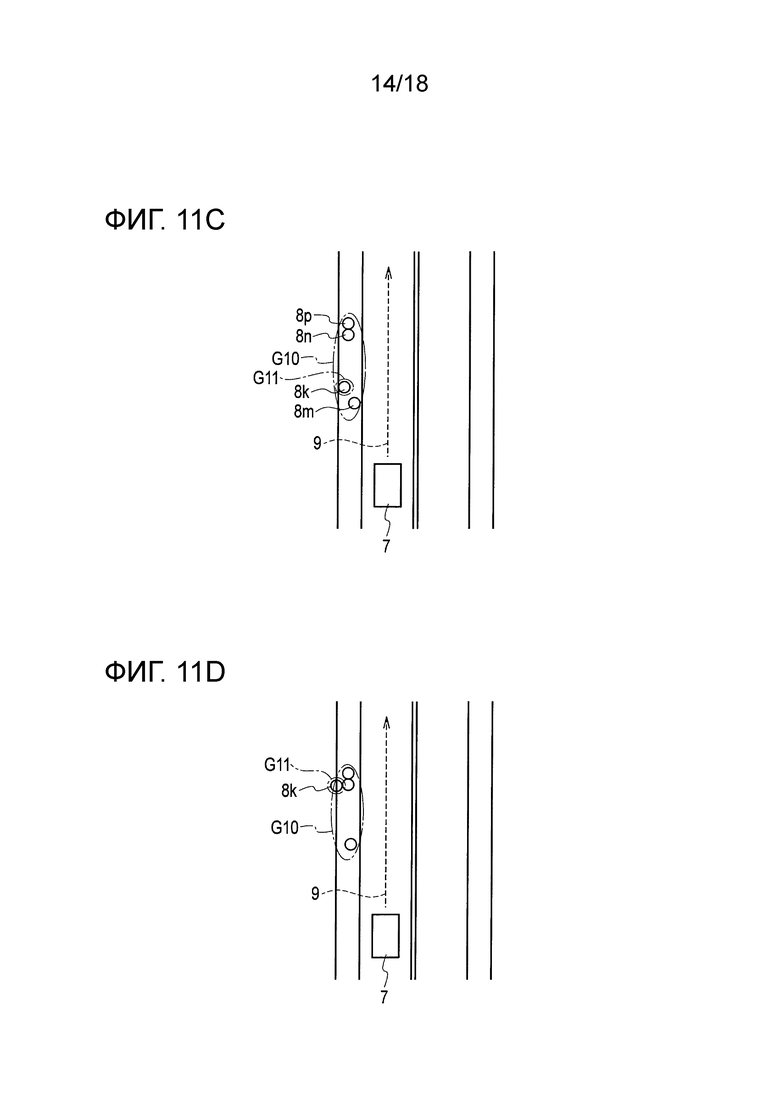
Фиг. 11C является видом сверху, показывающим пример отсортировки четырех пешеходов 8k, 8m, 8n и 8p в две группы G10 и G11 согласно скоростям перемещения.
Фиг. 11D является видом сверху, показывающим состояние, в котором пешеход 8k обгоняет других пешеходов 8m, 8n и 8p.
Фиг. 11E является видом сверху, показывающим состояние, в котором пешеход 8k обгоняет других пешеходов 8m, 8n и 8p.
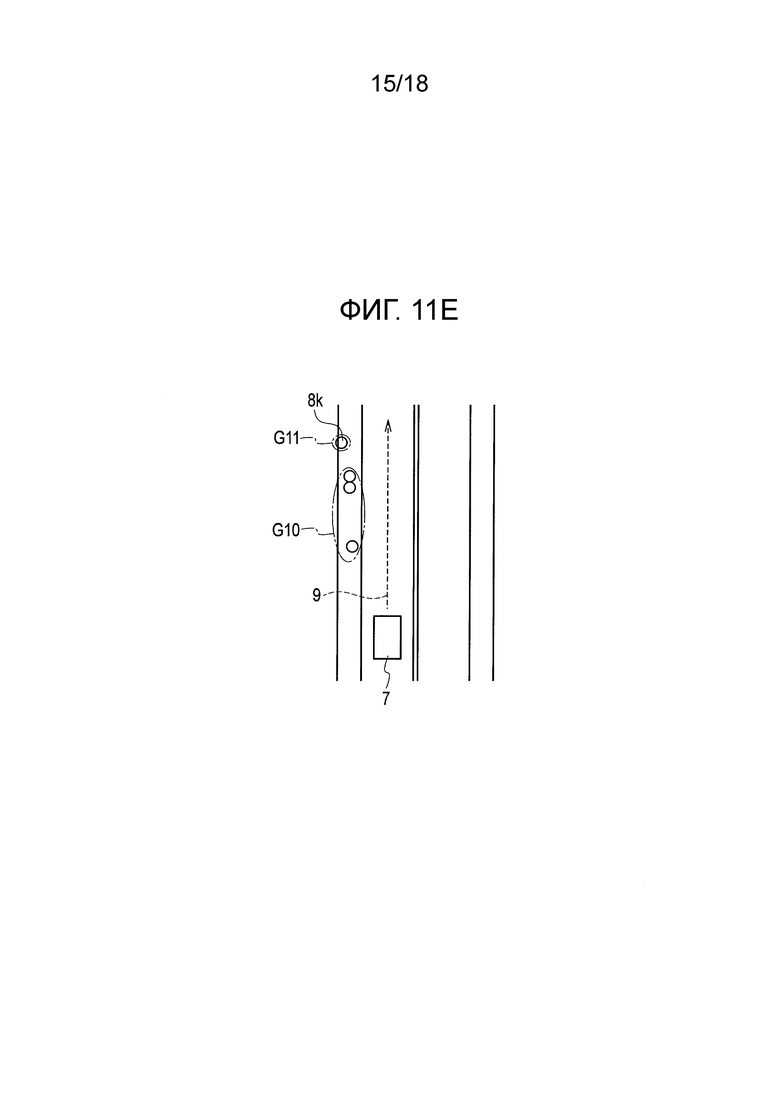
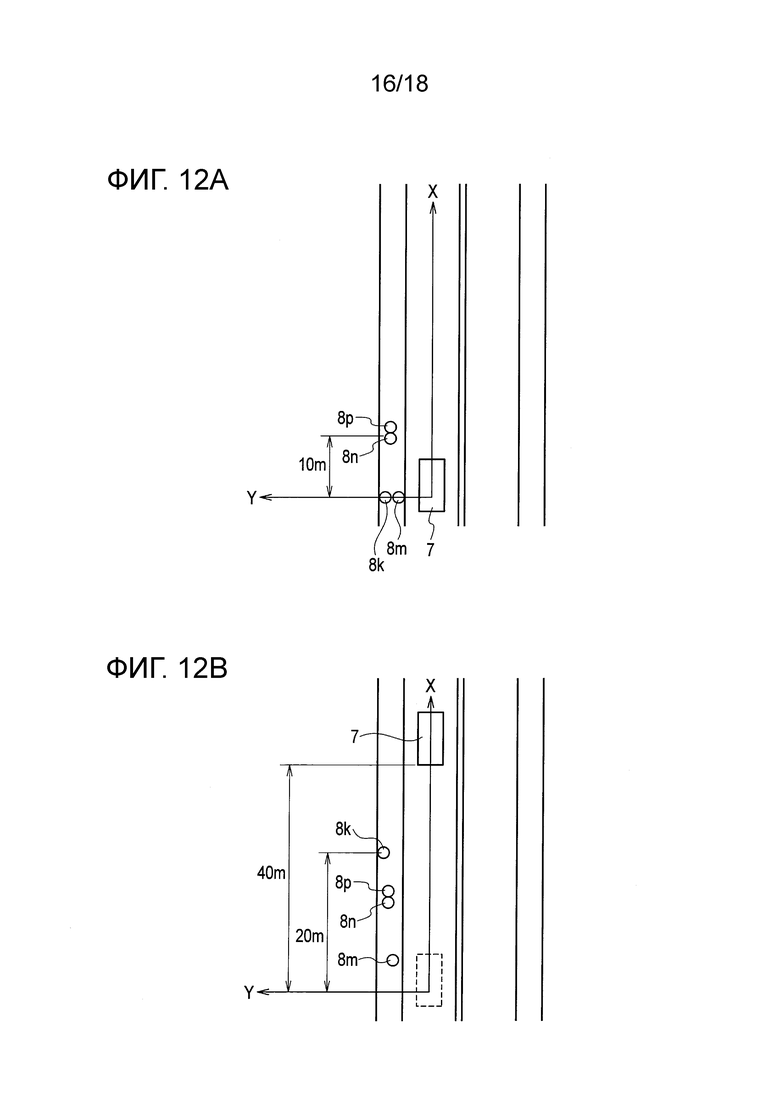
Фиг. 12A является видом сверху, показывающим взаимосвязь между перемещением рассматриваемого транспортного средства 7 и перемещениями пешеходов 8k, 8m, 8n и 8p.
Фиг. 12B является видом сверху, показывающим взаимосвязь между перемещением рассматриваемого транспортного средства 7 и перемещениями пешеходов 8k, 8m, 8n и 8p.
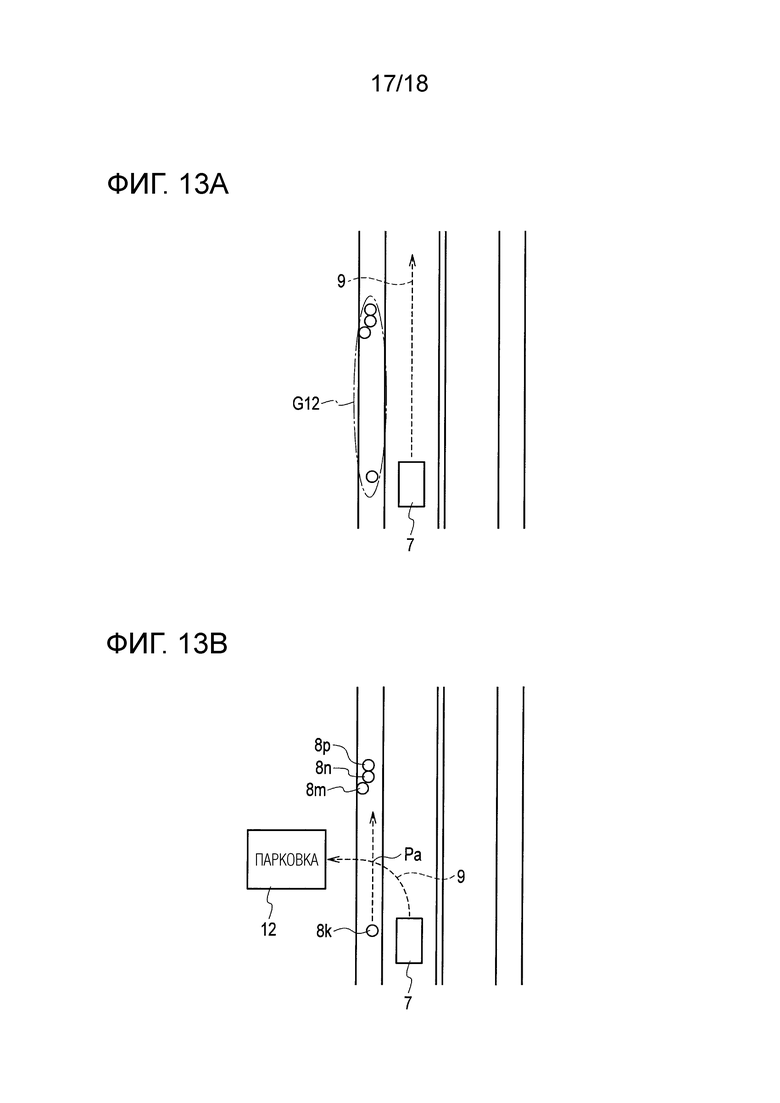
Фиг. 13A является видом сверху, показывающим пример, в котором позиции пешеходов 8k, 8m, 8n и 8p не имеют влияния на перемещение рассматриваемого транспортного средства 7.
Фиг. 13B является видом сверху, показывающим пример, в котором позиции пешеходов 8k, 8m, 8n и 8p имеют влияние на перемещение рассматриваемого транспортного средства 7.
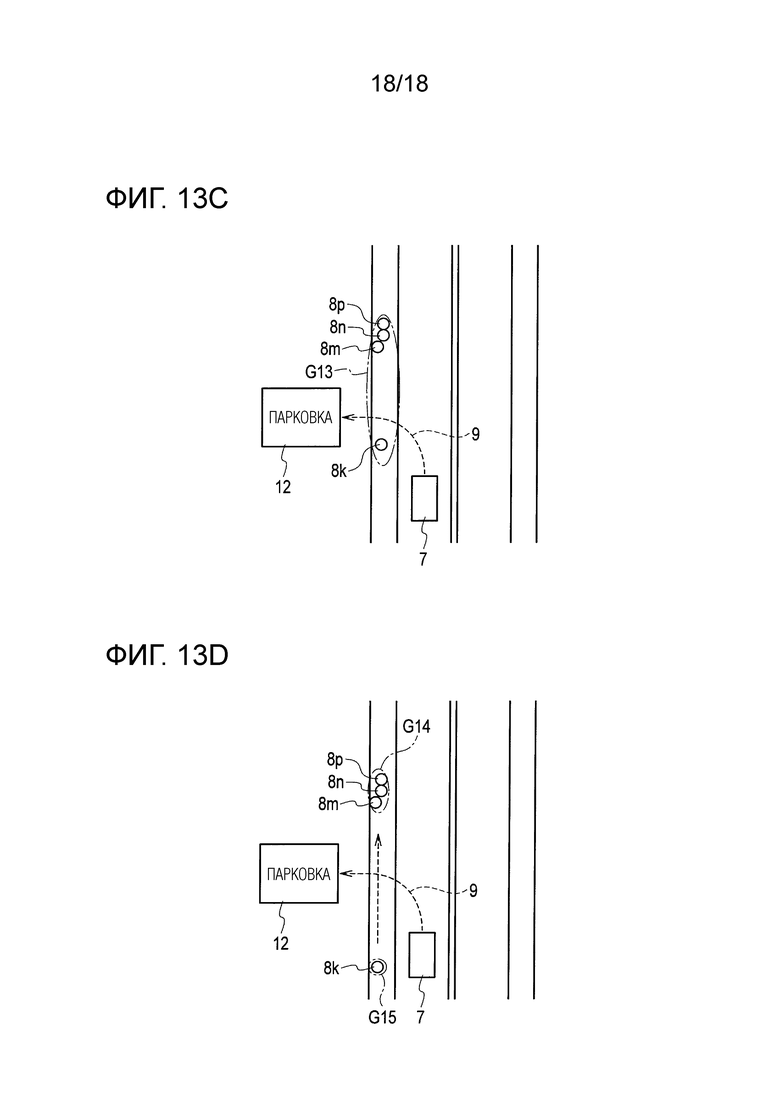
Фиг. 13C является видом сверху, показывающим пример, в котором рассматриваемое транспортное средство 7 не может проезжать через пространство между пешеходом 8k и пешеходом 8m.
Фиг. 13D является видом сверху, показывающим пример, в котором рассматриваемое транспортное средство 7 может проезжать через пространство между пешеходом 8k и пешеходом 8m.
Подробное описание вариантов осуществления
[0009] Первый вариант осуществления
Ниже подробно описывается вариант осуществления со ссылкой на чертежи. Идентичные элементы в описаниях чертежей обозначаются посредством идентичных ссылок с номерами, и перекрывающиеся пояснения не повторяются ниже.
[0010] Ниже описывается конфигурация устройства отслеживания объектов согласно варианту осуществления со ссылкой на фиг. 1. Устройство отслеживания объектов включает в себя датчик 10 обнаружения объектов для обнаружения объектов около рассматриваемого транспортного средства и схему 80 вычисления для отслеживания объектов во временных рядах, обнаруженных посредством датчика 10 обнаружения объектов. Схема 80 вычисления включает в себя схему 20 извлечения пешеходов для извлечения пешеходов из объектов, обнаруженных посредством датчика 10 обнаружения объектов, схему 30 получения картографической информации для получения картографической информации около рассматриваемого транспортного средства, схему 40 получения информации рассматриваемого транспортного средства для получения информации относительно рассматриваемого транспортного средства, схему 60 определения групп и схему 70 отслеживания для отслеживания соответствующих объектов во временных рядах.
[0011] Схема 80 вычисления может представлять собой микрокомпьютер, включающий в себя центральный процессор (CPU), запоминающее устройство и модуль ввода-вывода. Компьютерная программа для инструктирования микрокомпьютеру служить в качестве схемы 80 вычисления устанавливается с возможностью выполняться в микрокомпьютере. Соответственно, микрокомпьютер функционирует в качестве схемы 80 вычисления. Хотя настоящий вариант осуществления проиллюстрирован для случая, в котором программное обеспечение устанавливается, чтобы изготавливать схему 80 вычисления, следует понимать, что специализированные аппаратные средства для выполнения каждой обработки информации, как описано ниже, могут подготавливаться, чтобы составлять схему 80 вычисления. Соответствующие схемы (20, 30, 40, 60 и 70), включенные в схему 80 вычисления, могут состоять из отдельных аппаратных средств. Схема 80 вычисления также может служить в качестве электронного модуля управления (ECU), используемого для другой обработки управления в рассматриваемом транспортном средстве.
[0012] Схема 60 определения групп сортирует множество объектов, одновременно обнаруженных посредством датчика 10 обнаружения объектов, в группы в зависимости от степени влияния позиций объектов на перемещение рассматриваемого транспортного средства. Схема 60 определения групп отсортировывает объекты в группы более конкретно по мере того, как степень влияния позиций объектов на перемещение рассматриваемого транспортного средства больше, и отсортировывает объекты в группы более приблизительно по мере того, как степень влияния позиций объектов на перемещение рассматриваемого транспортного средства меньше. Другими словами, схема 60 определения групп отсортировывает объекты, расположенные в более узкой области, в одну группу по мере того, как степень влияния позиций объектов на перемещение рассматриваемого транспортного средства больше, и отсортировывает объекты, расположенные в более широкой области, в одну группу по мере того, как степень влияния позиций объектов на перемещение рассматриваемого транспортного средства меньше.
[0013] Схема 70 отслеживания отслеживает каждую отсортированную группу в качестве отдельного объекта во временных рядах. Когда множество объектов обнаруживаются одновременно посредством датчика 10 обнаружения объектов, схема 70 отслеживания не отслеживает объекты отдельно, но отслеживает каждую отсортированную группу в качестве отдельного объекта. Это сокращает число объектов, которые должны отслеживаться, с тем чтобы снижать нагрузку по обработке схемы 80 вычисления.
[0014] Датчик 10 обнаружения объектов может обнаруживать, по меньшей мере, относительную позицию между рассматриваемым транспортным средством и каждым объектом и относительную скорость и атрибут каждого объекта. Датчик 10 обнаружения объектов обнаруживает атрибут объекта посредством определения того, представляет собой объект или нет что-либо из следующего: транспортное средство, пешеход и велосипед, или определения того, что объект является непонятным. Например, датчик 10 обнаружения объектов захватывает изображение около рассматриваемого транспортного средства с использованием монокулярной или мультиокулярной стереокамеры, установленной в рассматриваемом транспортном средстве. Датчик 10 обнаружения объектов выполняет обработку стереоизображения на основе принципа триангуляции из захваченного изображения, с тем чтобы получать трехмерные координаты объекта в изображении. Альтернативно, датчик 10 обнаружения объектов может получать трехмерные координаты объекта с использованием лазерного дальномера (LRF) вместо камеры или комбинированного с камерой.
[0015] Схема 20 извлечения пешеходов извлекает пешеходов из объектов, обнаруженных посредством датчика 10 обнаружения объектов, например, согласно площадям, высотам относительно земли, скоростям перемещения и формам объектов. Схема 20 извлечения пешеходов извлекает пешеходов на основе информации определения атрибутов для пешеходов (включающей в себя площади, высоты относительно земли, скорости перемещения и формы) и сохраняет информацию извлеченных пешеходов в запоминающем устройстве. Информация определения атрибутов может получаться из формы и величины перемещения каждого объекта либо таких характеристик, как лицо и одежда, при использовании снятого камерой изображения. Вместо этого может использоваться любой другой способ.
[0016] Настоящий вариант осуществления иллюстрирует устройство отслеживания объектов, которое представляет собой устройство отслеживания пешеходов для отслеживания пешеходов, извлеченных из объектов, обнаруженных посредством датчика 10 обнаружения объектов.
[0017] Схема 30 получения картографической информации получает картографическую информацию около рассматриваемого транспортного средства согласно предварительно подготовленной позиционной информации рассматриваемого транспортного средства. Вся картографическая информация относительно дорог, по которым может двигаться рассматриваемое транспортное средство, предварительно сохраняется в качестве картографических данных в модуле хранения данных, включающем в себя полупроводниковое запоминающее устройство. Схема 30 получения картографической информации выполняет поиск в картографических данных с использованием позиционной информации рассматриваемого транспортного средства и извлекает картографическую информацию около рассматриваемого транспортного средства из картографических данных. Картографическая информация около рассматриваемого транспортного средства включает в себя, по меньшей мере, информацию относительно полос движения на дорогах, ширин и форм тротуаров и правил дорожного движения около рассматриваемого транспортного средства.
[0018] Схема 30 получения картографической информации может выполнять поиск в модуле хранения данных, установленном в рассматриваемом транспортном средстве, с использованием позиционной информации рассматриваемого транспортного средства, с тем чтобы получать картографическую информацию около рассматриваемого транспортного средства или извлекать картографическую информацию около рассматриваемого транспортного средства из облачной базы данных, с которой рассматриваемое транспортное средство может соединяться через беспроводную связь. Схема 30 получения картографической информации в силу этого может получать картографическую информацию около рассматриваемого транспортного средства из модуля хранения данных, присутствующего внутри или снаружи относительно устройства отслеживания объектов. При использовании в данном документе, фраза "около рассматриваемого транспортного средства" означает предварительно определенную область на основе рассматриваемого транспортного средства, например, область, включающую в себя диапазон обнаружения датчика 10 обнаружения объектов.
[0019] Схема 40 получения информации рассматриваемого транспортного средства получает информацию рассматриваемого транспортного средства, по меньшей мере, относительно скорости, темпа ускорения, угла поворота при рулении и маршрута движения рассматриваемого транспортного средства. Скорость и темп ускорения рассматриваемого транспортного средства могут получаться из сигналов, указывающих скорость вращения колес, выводимую из датчика скорости вращения колес, предоставленного на колесе рассматриваемого транспортного средства. Угол поворота при рулении может получаться из сигналов, указывающих направление, позицию нейтрали и угол поворота руля, выводимых из датчика угла поворота, присоединяемого к рулевому валу. Маршрут движения представляет собой диспетчеризованный маршрут, по которому движется рассматриваемое транспортное средство до достижения предварительно определенного пункта назначения. Маршрут движения извлекается из навигационной системы и определяется посредством подтверждения водителя. Любой другой традиционный способ также может использоваться для получения маршрута движения.
[0020] Когда датчик 10 обнаружения объектов одновременно обнаруживает множество объектов, и схема 20 извлечения пешеходов одновременно извлекает множество пешеходов, схема 60 определения групп сортирует пешеходов в группы в зависимости от степени влияния позиций пешеходов на перемещение рассматриваемого транспортного средства. В частности, схема 60 определения групп сначала выполняет начальную группировку, чтобы отсортировывать пешеходов посредством направлений перемещения. Схема 60 определения групп затем выполняет более конкретную группировку пешеходов, перемещающихся в идентичном направлении, в зависимости от степени влияния позиций пешеходов на перемещение рассматриваемого транспортного средства. Схема 60 определения групп вычисляет степень влияния на перемещение рассматриваемого транспортного средства, по меньшей мере, в соответствии с одним из позиции рассматриваемого транспортного средства на карте, направления перемещения, скорости перемещения и маршрута движения рассматриваемого транспортного средства, относительной позиции и относительной скорости каждого пешехода по отношению к рассматриваемому транспортному средству, направления перемещения каждого пешехода, картографической информации около рассматриваемого транспортного средства и информации рассматриваемого транспортного средства. Схема 60 определения групп может вычислять степень влияния на перемещение рассматриваемого транспортного средства с использованием любой другой информации.
[0021] Например, по мере того, как позиции пешеходов являются более удаленными от позиции рассматриваемого транспортного средства на карте и маршрута движения рассматриваемого транспортного средства, степень влияния присутствия и перемещения рассматриваемого транспортного средства на безопасность пешеходов может быть меньшей. Схема 60 определения групп в силу этого определяет степень влияния на перемещение рассматриваемого транспортного средства как меньшую по мере того, как позиции пешеходов являются более удаленными от позиции рассматриваемого транспортного средства на карте и маршрута движения рассматриваемого транспортного средства, и сортирует пешеходов, присутствующих в более широкой области, в одну группу. Это сокращает число отсортированных групп при обеспечении безопасных перемещений как пешеходов, так и рассматриваемого транспортного средства. Соответственно, вычислительная нагрузка при отслеживании пешеходов может уменьшаться с подтвержденной достаточной безопасностью пешеходов. Схема 60 определения групп может определять степень влияния на перемещение рассматриваемого транспортного средства как меньшую по мере того, как позиции пешеходов являются более удаленными либо от текущей позиции рассматриваемого транспортного средства на карте, либо от маршрута движения рассматриваемого транспортного средства.
[0022] Схема 60 определения групп вычисляет и сохраняет характерную позицию каждой группы на карте, а также размер, форму, направление перемещения и относительную скорость каждой группы.
[0023] Схема 70 отслеживания отслеживает каждую группу в качестве одного пешехода во временных рядах. Когда множество пешеходов обнаруживаются одновременно посредством датчика 10 обнаружения объектов, схема 70 отслеживания не отслеживает пешеходов отдельно, но может отслеживать сгруппированных пешеходов в качестве одного пешехода во временных рядах.
[0024] Ниже проиллюстрирован способ отслеживания объектов с использованием устройства отслеживания объектов, показанного на фиг. 1, со ссылкой на фиг. 2.
[0025] На этапе S110, датчик 10 обнаружения объектов, установленный в рассматриваемом транспортном средстве, обнаруживает объекты около рассматриваемого транспортного средства. Процесс переходит к этапу S120, и схема 20 извлечения пешеходов извлекает объекты, атрибуты которых представляют собой пешеходов, из обнаруженных объектов, и сохраняет информацию относительно извлеченных пешеходов в запоминающем устройстве. Информация относительно пешеходов включает в себя относительные позиции, относительные скорости и направления перемещения пешеходов относительно рассматриваемого транспортного средства.
[0026] Процесс переходит к этапу S130, и схема 60 определения групп выполняет начальную группировку одновременно извлеченных пешеходов, в соответствии с векторами скорости или направлениями перемещения. Например, схема 60 определения групп сортирует множество пешеходов, перемещающихся в идентичном направлении в идентичной области тротуара любого из 2A-2H либо на идентичном пешеходном переходе любого из 1a-1d, показанных на фиг. 3, в одну начальную группу.
[0027] Процесс переходит к этапу S140, и схема 30 получения картографической информации получает картографическую информацию около рассматриваемого транспортного средства согласно предварительно подготовленной позиционной информации рассматриваемого транспортного средства.
[0028] На этапе S150 и S160, схема 60 определения групп определяет то, находятся либо нет позиции извлеченных пешеходов около перекрестка или в пределах перекрестка. Ниже описываются фразы "около перекрестка" и "в пределах перекрестка" со ссылкой на фиг. 3.
[0029] Относительно перекрестка четырех дорог, как показано на фиг. 3, фраза "в пределах перекрестка 1" означает область, в которой дороги пересекаются, причем область включает в себя четыре пешеходных перехода 1a-1d, расположенные на перекрестке, и дополнительно протягивается наружу на расстояние d1 от внешних краев четырех пешеходных переходов 1a-1d. "Расстояние d1" составляет значение, определенное с учетом ошибки обнаружения датчика 10 обнаружения объектов, которая составляет, например, 0,5 метров. Фраза "около перекрестка 2" означает область, включающую в себя область "в пределах перекрестка 1" и дополнительно протягивающуюся наружу на расстояние d2 (например, на 30 метров) от центра перекрестка. Область "около перекрестка 2" включает в себя восемь областей 2A-2H тротуара, соединенных с четырьмя пешеходными переходами 1a-1d.
[0030] На этапе S150, схема 60 определения групп определяет то, расположены или нет извлеченные пешеходы около перекрестка 2. Процесс переходит к этапу S160, когда извлеченные пешеходы расположены около перекрестка 2 ("Да" на этапе S150), и процесс переходит к этапу S220, когда извлеченные пешеходы расположены за пределами области около перекрестка 2 ("Нет" на этапе S150), так что схема 60 определения групп выполняет третью обработку.
[0031] На этапе S160, схема 60 определения групп определяет то, расположены или нет извлеченные пешеходы в пределах перекрестка 1, согласно позиционной информации рассматриваемого транспортного средства, полученной на этапе S140. Процесс переходит к этапу S170, когда извлеченные пешеходы расположены в пределах перекрестка 1 ("Да" на этапе S160), так что схема 60 определения групп выполняет первую обработку. Процесс переходит к этапу S180, когда извлеченные пешеходы расположены за пределами перекрестка 1 ("Нет" на этапе S160), так что схема 60 определения групп выполняет вторую обработку. Когда множество пешеходов обнаруживаются в пределах перекрестка 1, около перекрестка 2 и за пределами области около перекрестка 2, схема 60 определения групп выполняет первую-третью обработку для группировки пешеходов в каждой области, показанной на фиг. 3, в которой расположены пешеходы.
[0032] Процесс переходит к этапу S190, и схема 70 отслеживания вычисляет характерную позицию и размер каждой группы, чтобы отслеживать каждую отсортированную группу в качестве одного пешехода. Например, как показано на фиг. 8, ниже описывается случай, в котором пять пешеходов 8 отсортировываются в идентичную группу G,. Схема 70 отслеживания определяет то, что группа G имеет размер прямоугольника, имеющего длину Lg и ширину Wi, охватывающую всех пешеходов 8, включенных в группу G. Схема 70 отслеживания определяет центральную позицию RP(X, Y) прямоугольника, имеющего длину Lg и ширину Wi, в качестве характерной позиции группы G.
[0033] Процесс переходит к этапу S200, и схема 70 отслеживания отслеживает каждую группу в качестве одного пешехода во временных рядах. Например, схема 70 отслеживания выполняет обработку отслеживания во временных рядах относительно обнаруженных объектов на четырех стадиях, как показано на фиг. 9A-9D. Фиг. 9A является видом, показывающим обработку, выполняемую только в первом кадре. Во-первых, схема 70 отслеживания выделяет метки 13 для отслеживания (номера для отслеживания) всем обнаруженным пешеходам 8. Во-вторых, схема 70 отслеживания прогнозирует позиции пешеходов, указываемых посредством меток 13 для отслеживания, как показано на фиг. 9B. Схема 70 отслеживания прогнозирует позиции пешеходов 8 в последующее время (T+1) относительно всех меток 13 для отслеживания со ссылкой на направления перемещения, скорости перемещения и позиции пешеходов, с тем чтобы перемещать метки 13 для отслеживания в прогнозные позиции 11. В-третьих, схема 70 отслеживания сравнивает позиции (позиции обнаружения) пешеходов 8, обнаруженных в то время (T+1), с прогнозными позициями 11, показанными на фиг. 9B. Когда соответствующая прогнозная позиция 11 не может наблюдаться в пределах предварительно определенного расстояния (например, шести метров) от позиции 8' обнаружения, как показано на фиг. 9C, схема 70 отслеживания заново формирует метку 13' для отслеживания в позиции обнаружения. В-четвертых, схема 70 отслеживания удаляет метку 13 для отслеживания, как показано на фиг. 9D, когда соответствующая позиция обнаружения не может наблюдаться в пределах предварительно определенного расстояния (например, шести метров) от прогнозной позиции 11.
[0034] На этапе S210, выполняется определение того, выключается или нет переключатель зажигания (IGN). Когда IGN выключается ("Да" на этапе S210), процесс, показанный на фиг. 2, завершается. Когда IGN не выключается ("Нет" на этапе S210), процесс возвращается к этапу S110. Процесс, показанный на блок-схеме последовательности операций способа по фиг. 2, повторяется с предварительно определенным циклом до тех пор, пока не будет выключен IGN.
[0035] Первая обработка
Ниже описываются конкретные этапы первой обработки (этап S170 на фиг. 2) со ссылкой на фиг. 4. На этапе S510, множество пешеходов, расположенных в идентичной области пешеходного перехода, сортируются в идентичную группу на каждом из пешеходных переходов 1a-1d. Термин "область пешеходного перехода" означает область, включающую в себя соответствующие пешеходные переходы 1a-1d и дополнительно протягивающуюся внутрь и наружу относительно перекрестка на предварительно определенное расстояние от каждого из периферийных краев пешеходных переходов 1a-1d, как показано на фиг. 5A. Четыре области 1A-1D пешеходного перехода задаются таким образом, что они соответствуют четырем пешеходным переходам 1a-1d, соответственно. Например, пять пешеходов 8a и 8b, расположенных в области 1A пешеходного перехода, сортируются в идентичную группу, и шесть пешеходов 8c и 8d, расположенных в области 1C пешеходного перехода, сортируются в другую группу.
[0036] Процесс переходит к этапу S520, и расстояние между соответствующими пешеходами, принадлежащими идентичной группе, вычисляется в соответствии с относительными позициями соответствующих пешеходов по отношению к рассматриваемому транспортному средству 7. Процесс переходит к этапу S530, и маршрут 9 движения, полученный посредством схемы 40 получения информации рассматриваемого транспортного средства, загружается.
[0037] Процесс переходит к этапу S540, и выполняется определение того, присутствуют или нет пешеходы, сгруппированные на этапе S510, на маршруте 9 движения. Например, когда рассматриваемое транспортное средство 7 поворачивает направо на перекрестке, как показано на фиг. 5A, область 1C пешеходного перехода присутствует на маршруте 9 движения ("Да" на этапе S540). Пешеходы, расположенные в области 1C пешеходного перехода, в силу этого определяются как присутствующие на маршруте 9 движения. В этом случае, степень влияния шести пешеходов 8c и 8d на перемещение рассматриваемого транспортного средства является высокой. Шесть пешеходов 8c и 8d, расположенных в области 1C пешеходного перехода, в силу этого предпочтительно сортируются в более конкретные группы для отслеживания. А именно, пешеходы, присутствующие в более узкой области, предпочтительно дополнительно сортируются в группы. После этого процесс переходит к этапу S550.
[0038] На этапе S550, выполняется определение того, расположен или нет каждый из шести пешеходов 8c и 8d на пешеходном переходе 1c. Когда пешеходы расположены на пешеходном переходе 1c ("Да" на этапе S550), процесс переходит к этапу S560, и расстояние между соответствующими пешеходами сравнивается с предварительно определенным пороговым значением D1. На этапе S570, пешеходы с расстоянием, меньшим порогового значения D1, сортируются в идентичную группу. Например, как показано на фиг. 5B, три пешехода 8c сортируются в идентичную группу G1. Пешеход 8d отделен от других трех пешеходов 8c на расстояние d3. Расстояние d3 превышает пороговое значение D1. Пешеход 8d сортируется в другую группу G2.
[0039] Когда пешеходы 8e и 8f не присутствуют на пешеходном переходе 1c ("Нет" на этапе S550), как показано на фиг. 5D, например, процесс переходит к этапу S590. На этапе S590, расстояние между пешеходным переходом 1c и соответствующими пешеходами 8e и 8f, не присутствующими на пешеходном переходе 1c, сравнивается с предварительно определенным пороговым значением D3. Расстояние между пешеходом 8e и пешеходным переходом 1c меньше порогового значения D3. В этом случае, пешеход 8e может сортироваться в группу G1, идентичную группе трех пешеходов 8c, присутствующих на пешеходном переходе 1c. Пороговое значение D3, например, может задаваться равным значению, идентичному значению ошибки, включенной в относительные позиции объектов, обнаруженных посредством датчика 10 обнаружения объектов.
[0040] Расстояние между пешеходом 8f и пешеходным переходом 1c составляет пороговое значение D3 или больше. В этом случае, пешеход 8f отклоняется от пешеходного перехода 1c посредством ошибки измерения или более и в силу этого может определяться как не придерживающийся правил дорожного движения. Пешеход 8f сортируется в другую группу G4, отличающуюся от трех пешеходов 8c, присутствующих на пешеходном переходе 1c. Как описано выше, множество объектов сортируются в группы в зависимости от степени соблюдения правил дорожного движения на основе позиций объектов.
[0041] Определение на этапе S590 основано на расстоянии, но может быть основано на направлении перемещения соответствующих пешеходов вместо расстояния или в дополнение к расстоянию. Например, когда направление перемещения пешехода соответствует направлению прохождения пешеходного перехода, пешеход может определяться как переходящий дорогу. Когда направление перемещения не соответствует направлению прохождения пешеходного перехода, пешеход определяется как не придерживающийся правил дорожного движения и в силу этого определяется как имеющий большое влияние на перемещение рассматриваемого транспортного средства. На этапе S590, такой пешеход может сортироваться в другую группу G4, отличающуюся от трех пешеходов 8c, когда пешеход не удовлетворяет обоим либо одному из условий расстояния и направления перемещения.
[0042] Как показано на фиг. 5A, поскольку область 1A пешеходного перехода не присутствует на маршруте 9 движения, пешеходы 8a и 8b, сгруппированные на этапе S510, могут определяться как не присутствующие на маршруте 9 движения. В этом случае ("Нет" на этапе S540), степень влияния пяти пешеходов 8a и 8b, расположенных в области 1A пешеходного перехода, может определяться как небольшая. После этого процесс переходит к этапу S580, и расстояние между соответствующими пешеходами сравнивается с предварительно определенным пороговым значением D2. На этапе S570, пешеходы с расстоянием, меньшим порогового значения D2, сортируются в идентичную группу. Пороговое значение D2 превышает пороговое значение D1. Пороговое значение D2, например, задается с возможностью иметь длину, идентичную длине пешеходного перехода, а именно, ширину, идентичную ширине дороги. Пять пешеходов 8a и 8b, отделенные друг от друга в области 1A пешеходного перехода, в силу этого сортируются в идентичную группу G3.
[0043] Как описано выше, первая обработка может выполнять группировку пешеходов, расположенных в пределах перекрестка 1, в соответствии с расстояниями между пешеходами, направлениями перемещения и взаимосвязью между маршрутом 9 движения рассматриваемого транспортного средства и соответствующими позициями пешеходов.
[0044] Вторая обработка
Ниже описываются конкретные этапы второй обработки (этап S180 на фиг. 2) со ссылкой на фиг. 6. На этапе S710, пешеходы, расположенные в каждой из областей 2A-2H тротуара, показанных на фиг. 3, извлекаются. Например, как показано на фиг. 7A, четыре пешехода 8g и 8h, расположенные в области 2A тротуара, извлекаются.
[0045] Процесс переходит к этапу S720, и расстояние между соответствующими пешеходами, расположенными в идентичной области тротуара, вычисляется в соответствии с относительной позицией соответствующих пешеходов по отношению к рассматриваемому транспортному средству 7. Процесс переходит к этапу S730, и расстояние между соответствующими пешеходами сравнивается с предварительно определенным пороговым значением D4. Пешеходы с расстоянием, меньшим порогового значения D4, сортируются в идентичную группу. Например, как показано на фиг. 7B, расстояния между четырьмя пешеходами 8g и 8h меньше порогового значения D4, и пешеходы 8g и 8h в силу этого сортируются в идентичную группу G5. Пороговое значение D4, например, в два раза больше порогового значения D2. Когда расстояние между пешеходами составляет пороговое значение D4 или больше, соответствующие пешеходы сортируются в другую группу.
[0046] Процесс переходит к этапу S740, и выполняется определение того, кажется или нет, что каждая отсортированная группа входит на перекресток 1. Например, каждая группа определяется на предмет того, следует или нет входить на перекресток 1 в течение предварительно определенного времени, согласно скорости перемещения и направлению перемещения каждой группы и расстоянию между каждой группой и перекрестком 1.
[0047] Когда кажется, что каждая группа входит на перекресток 1 ("Да" на этапе S740), процесс переходит к этапу S750, и получаются возможные намеченные пути, по которым могут следовать пешеходы 8g и 8h, принадлежащие идентичной группе и придерживающиеся правил дорожного движения. Например, пешеходы 8g и 8h, принадлежащие группе G5, показанной на фиг. 7C, определяются как собирающиеся входить на перекресток 1, так что намеченные пути L1 и L2 через пешеходные переходы 1a и 1b в пределах перекрестка получаются.
[0048] Процесс переходит к этапу S760, и маршрут 9 движения, полученный посредством схемы 40 получения информации рассматриваемого транспортного средства, загружается. Например, маршрут 9 движения для поворота направо на перекрестке загружается. Процесс переходит к этапу S770, и выполняется определение того, могут или нет пешеходы 8g и 8h входить на маршрут 9 движения, согласно намеченным путям L1 и L2 и маршруту 9 движения. Например, как показано на фиг. 7C, когда маршрут 9 движения не пересекает ни один из намеченных путей L1 и L2, вероятность того, что пешеходы 8g и 8h входят на маршрут 9 движения, определяется как небольшая.
[0049] Когда имеется небольшая вероятность того, что пешеходы 8g и 8h входят на маршрут 9 движения ("Нет" на этапе S770), влияние пешеходов на перемещение рассматриваемого транспортного средства 7 может определяться как небольшое. После этого процесс переходит к этапу S790 без более конкретной группировки, и группы, полученные при обработке на этапе S730, непрерывно используются. Например, группа G5, включающая в себя четырех пешеходов 8g и 8h, остается идентичной.
[0050] Когда имеется вероятность того, что пешеходы 8g и 8h входят на маршрут 9 движения ("Да" на этапе S770), влияние пешеходов на перемещение рассматриваемого транспортного средства 7 может определяться как высокое. После этого процесс переходит к этапу S780, чтобы сортировать пешеходов в более конкретные группы, чем на этапе S730, и обработка группировки выполняется снова в соответствии с пороговым значением D1, меньшим порогового значения D4.
[0051] Например, как показано на фиг. 7D, четыре пешехода 8i и 8j, расположенные в тротуаре 2B, сортируются в идентичную группу G6 на этапе S730. Когда кажется, что группа G6 входит на перекресток 1 ("Да" на этапе S740), возможные намеченные пути L3 и L4, по которым могут следовать пешеходы 8i и 8j, принадлежащие группе G6, получаются, как показано на фиг. 7E. Поскольку любой из намеченных путей L3 и L4 пересекает маршрут 9 движения ("Да" на этапе S770), процесс переходит к этапу S780. Когда расстояние между пешеходом 8i и пешеходами 8j определяется как превышающее пороговое значение D1, пешеход 8i и пешеходы 8j сортируются в различные группы G7 и G8, как показано на фиг. 7E. А именно, четыре пешехода 8i и 8j, расположенные в области 2B тротуара, подвергаются другой группировке в более узкой области, чем на этапе S730.
[0052] Хотя влияние пешеходов на перемещение рассматриваемого транспортного средства 7 определяется в соответствии с взаимосвязью между маршрутом 9 движения и намеченными путями L3 и L4, определение не должно зависеть от этой взаимосвязи. Например, определение может выполняться в соответствии с взаимосвязью между текущей позицией рассматриваемого транспортного средства 7 и намеченными путями L3 и L4. В частности, более широкая область может использоваться для того, чтобы сортировать пешеходов в одну группу по мере того, как расстояние между текущей позицией рассматриваемого транспортного средства 7 и намеченными путями L3 и L4, по которым могут следовать пешеходы 8i и 8j, больше.
[0053] На этапе S740, когда кажется, что группа не входит на перекресток 1 ("Нет" на этапе S740), влияние пешеходов, принадлежащих группе, на перемещение рассматриваемого транспортного средства 7 может определяться как небольшое. После этого процесс переходит к этапу S790, и группа, полученная при обработке на этапе S730, непрерывно используется.
[0054] Как описано выше, вторая обработка может выполнять группировку пешеходов, расположенных за пределами перекрестка 1 и в области около перекрестка 2, показанной на фиг. 3, в соответствии с расстояниями между пешеходами, направлениями перемещения и взаимосвязью между маршрутом 9 движения рассматриваемого транспортного средства и соответствующими позициями пешеходов.
[0055] Третья обработка
Ниже описываются конкретные этапы третьей обработки (этап S220 на фиг. 2) со ссылкой на фиг. 10. Третья обработка выполняет группировку пешеходов, расположенных за пределами области около перекрестка 2.
[0056] На этапе S910, множество одновременно извлеченных пешеходов подвергаются группировке в соответствии со скоростями перемещения. В частности, схема 60 определения групп вычисляет разность (ΔV) скоростей между соответствующими пешеходами, перемещающимися в идентичном направлении, извлеченном на этапе S130 на фиг. 2. Пешеходы, разность (ΔV) скоростей которых составляет предварительно определенное значение или меньше, сортируются в идентичную группу.
[0057] Например, как показано на фиг. 11A, устройство отслеживания объектов извлекает четырех пешеходов 8k, 8m, 8n и 8p, перемещающихся в идентичном направлении. Когда все разности (ΔV) скоростей между пешеходами составляют предварительно определенное значение или меньше, пешеходы 8k, 8m, 8n и 8p сортируются в идентичную группу G9, как показано на фиг. 11B.
[0058] Скорость перемещения пешехода 8k из числа пешеходов 8k, 8m, 8n и 8p больше на предварительно определенное значение или больше, чем других пешеходов 8m, 8n и 8p. Все разности (ΔV) скоростей между другими пешеходами 8m, 8n и 8p составляют предварительно определенное значение или меньше. В этом случае, пешеход 8k и другие пешеходы 8m, 8n и 8p сортируются в различные группы G11 и G10. Эта группировка может уменьшать дисперсию в числе или размере каждой группы, например, когда более быстрый пешеход 8k приближается к более медленным пешеходам 8m, 8n и 8p (фиг. 11C и фиг. 11D) или отдаляется от более медленных пешеходов 8m, 8n и 8p (фиг. 11E). Предварительно определенное значение разностей (ΔV) скоростей задается согласно определению того, может или нет более быстрый пешеход 8k обгонять более медленных пешеходов 8m, 8n и 8p в пределах периода, в который рассматриваемое транспортное средство 7 может выполнять обнаружение.
[0059] Например, как показано на фиг. 12A, датчик 10 обнаружения объектов, установленный в рассматриваемом транспортном средстве 7, обнаруживает четырех пешеходов 8k, 8m, 8n и 8p. Скорость перемещения пешеходов 8m, 8n и 8p является низкой (например, четыре километра в час), в то время как скорость перемещения пешехода 8k является высокой (например, 15 километров в час). Датчик 10 обнаружения объектов может обнаруживать объекты в пределах диапазона в 40 метров от заднего конца рассматриваемого транспортного средства 7. Когда рассматриваемое транспортное средство 7 движется на скорости 30 километров в час, для рассматриваемого транспортного средства 7 требуется 4,8 секунды для того, чтобы перемещаться на 40 метров от позиции, показанной на фиг. 12A. Во время этого перемещения, пешеходы 8m, 8n и 8p перемещаются на 5,3 метра, и пешеход 8k перемещается на 20 метров, что приводит к позиционной взаимосвязи, как показано на фиг. 12B. Пешеход 8k догоняет и обгоняет, так что он уходит от пешеходов 8n и 8p впереди пешехода 8k. При таких условиях, пешеход 8k сортируется в группу, отличающуюся от пешеходов 8m, 8n и 8p. Разность (ΔV) скоростей между пешеходом 8m и пешеходами 8n и 8p составляет предварительно определенное значение или меньше, и позиционная взаимосвязь между пешеходами 8m, 8n и 8p не изменена, как показано на фиг. 12A и фиг. 12B. При таких условиях, пешеход 8m и два пешехода 8n и 8p впереди пешехода 8m сортируются в идентичную группу.
[0060] Процесс переходит к этапу S920, и маршрут 9 движения, полученный посредством схемы 40 получения информации рассматриваемого транспортного средства, загружается. Процесс переходит к этапу S930, и выполняется определение того, имеют или нет позиции пешеходов влияние на перемещение рассматриваемого транспортного средства 7, согласно маршруту 9 движения. В частности, определение того, имеется или нет вероятность того, что позиции пешеходов перемещаются таким образом, чтобы создавать помехи маршруту 9 движения, идентично первой и второй обработке.
[0061] Например, как показано на фиг. 13A, когда маршрут 9 движения указывает прямое перемещение на дороге, отсутствует вероятность того, что позиции пешеходов 8k, 8m, 8n и 8p перемещаются таким образом, чтобы создавать помехи маршруту 9 движения. В силу этого выполняется определение в отношении того, что позиции пешеходов 8k, 8m, 8n и 8p не имеют влияния на перемещение рассматриваемого транспортного средства 7 ("Нет" на этапе S930), и процесс переходит к этапу 940. Когда маршрут 9 движения указывает то, что рассматриваемое транспортное средство 7 въезжает на парковку 12, расположенную на дороге, как показано на фиг. 13B, имеется вероятность того, что позиции пешеходов 8k, 8m, 8n и 8p создают помехи маршруту 9 движения. В силу этого выполняется определение в отношении того, что позиции пешеходов 8k, 8m, 8n и 8p имеют влияние на перемещение рассматриваемого транспортного средства 7 ("Да" на этапе S930), и процесс переходит к этапу S960.
[0062] На этапе S940, расстояние между соответствующими пешеходами сравнивается с пороговым значением D5. На этапе S950, пешеходы с расстоянием, меньшим порогового значения D5, сортируются в идентичную группу. Например, пороговое значение D5 задается равным бесконечности, и четыре пешехода 8k, 8m, 8n и 8p, перемещающиеся по идентичному тротуару в идентичном направлении, сортируются в идентичную группу G12, как показано на фиг. 13A.
[0063] На этапе S960, пороговое значение D6 задается с учетом расстояния и относительной скорости между соответствующими пешеходами и скорости рассматриваемого транспортного средства 7. Процесс переходит к этапу S970, и расстояние между соответствующими пешеходами сравнивается с пороговым значением D6. Например, как показано на фиг. 13B, разность во времени прибытия в точку Pa столкновения между пешеходом 8k и рассматриваемым транспортным средством 7 вычисляется, и рассматриваемое транспортное средство 7 определяется как имеющее возможность проезжать через пространство между пешеходом 8k и пешеходом 8m, когда разность времен составляет предварительно определенное время (например, две или три секунды) или больше. Более конкретно, когда расстояние между пешеходом 8k и пешеходом 8m составляет значение или больше, полученное посредством умножения скорости перемещения пешехода 8k на предварительно определенное время (две или три секунды), как показано на фиг. 13D, рассматриваемое транспортное средство 7 может проезжать через пространство между пешеходом 8k и пешеходом 8m. В этом случае, на этапе S950, пешеход 8k и другие три пешехода 8m, 8n и 8p сортируются в различные группы G14 и G15.
[0064] Когда расстояние между пешеходом 8k и пешеходом 8m меньше значения, полученного посредством умножения скорости перемещения пешехода 8k на предварительно определенное время (две или три секунды), как показано на фиг. 13C, рассматриваемое транспортное средство 7 не может проезжать через пространство между пешеходом 8k и пешеходом 8m. В этом случае, на этапе S950, пешеход 8k и другие три пешехода 8m, 8n и 8p сортируются в идентичную группу G13.
[0065] Этот вариант осуществления проиллюстрирован с пешеходами в качестве примера объектов, но не ограничен этой иллюстрацией. Например, схема 20 извлечения пешеходов может извлекать не только пешеходов, но также и велосипеды в качестве целей, которые должны отслеживаться. Пешеходы, которые должны отслеживаться, конечно, включают в себя пешеходов, которые идут со скоростью приблизительно в четыре километра в час, но также и пешеходов, которые перемещаются быстрее, а именно, пешеходов, которые бегут.
[0066] Как описано выше, этот вариант осуществления позволяет достигать следующих преимуществ.
[0067] Когда множество объектов обнаруживаются, объекты сортируются в группы в соответствии со степенью влияния позиций объектов, расположенных, например, на пешеходных переходах или велосипедных дорожках, на перемещение рассматриваемого транспортного средства, причем степень влияния включает в себя условия пересечения объектов относительно направления перемещения рассматриваемого транспортного средства, и временем, полученным посредством деления относительного расстояния каждого объекта до рассматриваемого транспортного средства на скорость приближения. Каждая из отсортированных групп отслеживается как объект во временных рядах. Соответственно, два или более объектов, отсортированные в идентичную группу, могут отслеживаться как отдельный объект во временных рядах. Поскольку число объектов, отслеживаемых во временных рядах, может уменьшаться, вычислительная нагрузка может уменьшаться при отслеживании множества объектов во временных рядах.
[0068] По мере того, как степень влияния позиций объектов на перемещение рассматриваемого транспортного средства меньше, объекты, расположенные в более широкой области, сортируются в идентичную группу. Поскольку число групп может уменьшаться при обеспечении безопасности перемещения рассматриваемого транспортного средства, вычислительная нагрузка может уменьшаться.
[0069] По мере того, как позиции объектов находятся дальше от маршрута 9 движения рассматриваемого транспортного средства, степень влияния объектов на перемещение рассматриваемого транспортного средства определяется, чтобы быть меньшей. Группировка в силу этого может выполняться в широкой области относительно объектов, имеющих короткие относительные расстояния, но расположенных за пределами маршрута движения. Соответственно, число объектов, которые должны отслеживаться, уменьшается, уменьшая вычислительную нагрузку системы. По мере того, как позиции объектов находятся ближе к маршруту 9 движения рассматриваемого транспортного средства, степень влияния объектов на перемещение рассматриваемого транспортного средства определяется как большая. Группировка выполняется в узкой области относительно объектов, имеющих большие относительные расстояния, но приближающихся к маршруту движения. Соответственно, может обеспечиваться более высокая безопасность перемещения рассматриваемого транспортного средства.
[0070] Степень влияния на перемещение рассматриваемого транспортного средства может определяться, чтобы быть меньшей по мере того, как позиции объектов находятся дальше от рассматриваемого транспортного средства. Поскольку группировка может выполняться в широкой области относительно объектов, удаленных от рассматриваемого транспортного средства, ошибка обнаружения датчика относительно объектов, удаленных от рассматриваемого транспортного средства, может разрешаться, с тем чтобы сокращать число групп, которые должны сортироваться.
[0071] Как описано в третьей обработке (фиг. 10 и фиг. 11A-11E), множество объектов сортируются в группы в соответствии с величинами перемещения объектов (включающими в себя скорости перемещения и направления перемещения). Соответственно, дисперсия в числе групп и размера и центральной позиции каждой группы уменьшается, с тем чтобы получать более стабильные результаты обнаружения.
[0072] Как проиллюстрировано на фиг. 5D и на этапе S590 на фиг. 4, множество объектов сортируются в группы в соответствии со степенью соблюдения правил дорожного движения. Поскольку объекты, не придерживающиеся правил дорожного движения, могут отслеживаться как группа, отличающаяся от объектов, придерживающихся правил дорожного движения, рассматриваемое транспортное средство может выполнять действие более безопасно.
[0073] Хотя настоящее изобретение описано выше со ссылкой на вариант осуществления, следует понимать, что настоящее изобретение не имеет намерение быть ограниченным подробным описанием изобретения и чертежами, составляющими часть этого раскрытия сущности. Различные альтернативные варианты осуществления, примеры и технические варианты применения должны становиться очевидными для специалистов в данной области техники согласно этому раскрытию сущности.
[0074] Этот вариант осуществления проиллюстрирован для случая, в котором влияние позиций объектов на перемещение рассматриваемого транспортного средства оценивается в зависимости от условий пересечения маршрута движения рассматриваемого транспортного средства относительно позиций объектов на карте или условий пересечения маршрута движения рассматриваемого транспортного средства относительно направлений перемещения объектов, но не ограничен этой иллюстрацией. Например, влияние может оцениваться в зависимости от относительного расстояния между рассматриваемым транспортным средством и соответствующими объектами или скорости приближения соответствующих объектов, приближающихся к рассматриваемому транспортному средству. В частности, по мере того, как относительное расстояние между рассматриваемым транспортным средством и соответствующими объектами меньше, или по мере того, как скорость приближения соответствующих объектов, приближающихся к рассматриваемому транспортному средству, больше, влияние позиций объектов на перемещение рассматриваемого транспортного средства может определяться как большее. Помимо этого, по мере того, как время до столкновения (TTC), полученное посредством деления относительного расстояния на время приближения, меньше, влияние позиции соответствующих объектов на перемещение рассматриваемого транспортного средства может определяться как большее.
[0075] Относительное расстояние между рассматриваемым транспортным средством и объектом может представлять собой либо расстояние между текущей позицией рассматриваемого транспортного средства и текущей позицией объекта, либо расстояние между маршрутом движения рассматриваемого транспортного средства и текущей позицией объекта. Относительное расстояние между рассматриваемым транспортным средством и объектом может представлять собой расстояние между оцененными позициями рассматриваемого транспортного средства и объекта после предварительно определенного времени, оцененное в соответствии с позициями рассматриваемого транспортного средства и объекта на карте, направлениями перемещения и скоростями перемещения. Оцененная позиция рассматриваемого транспортного средства после предварительно определенного времени может вычисляться из маршрута движения.
[0076] Скорость приближения объекта, приближающегося к рассматриваемому транспортному средству, может представлять собой либо текущую скорость приближения, либо скорость приближения после предварительно определенного времени. Скорость приближения после предварительно определенного времени может оцениваться в соответствии с маршрутом движения рассматриваемого транспортного средства, позицией объекта на карте и направлением перемещения и скоростью перемещения объекта. Направление перемещения и скорость перемещения рассматриваемого транспортного средства после предварительно определенного времени могут вычисляться из маршрута движения рассматриваемого транспортного средства. Направление движения и скорость движения объекта после предварительно определенного времени могут оцениваться в соответствии с текущей позицией объекта на карте и текущим направлением движения и текущей скоростью перемещения объекта.
[0077] По мере того, как пороговое значение расстояния между соответствующими объектами при определении группировки больше, объекты, распределенные в более широком диапазоне, могут сортироваться в идентичную группу, с тем чтобы расширять область, подвергнутую группировке. Когда влияние позиций объектов оценивается как небольшое, пороговое значение расстояния между объектами увеличивается, с тем чтобы расширять область, подвергнутую группировке.
[0078] Влияние объектов, присутствующих около рассматриваемого транспортного средства, на движение рассматриваемого транспортного средства отличается в зависимости от объектов. Например, когда управление автономным вождением выполняется для рассматриваемого транспортного средства, пункт назначения и маршрут движения в пункт назначения предварительно задаются. Влияние объекта на движение рассматриваемого транспортного средства в этом случае варьируется в зависимости от позиции и маршрута движения рассматриваемого транспортного средства на карте и позиции объекта на карте. Технический смысл отслеживания всех объектов около рассматриваемого транспортного средства отдельно является несущественным, и достаточно отслеживать множество объектов совместно, когда влияние объектов на движение рассматриваемого транспортного средства является небольшим. Настоящий вариант осуществления может предотвращать увеличение вычислительной нагрузки системы автономного вождения при обеспечении безопасного движения рассматриваемого транспортного средства, в частности, когда большое число пешеходов обнаруживается около перекрестка 2. Предотвращение увеличения вычислительной нагрузки может предотвращать уменьшение скорости обработки системы автономного вождения, соответственно.
[0079] Функции, описанные в варианте осуществления, могут реализовываться в одной или более схем обработки. Схема обработки включает в себя программируемое обрабатывающее устройство, к примеру, обрабатывающее устройство, включающее в себя электрическую схему. Такое обрабатывающее устройство включает в себя специализированную интегральную схему (ASIC), выполненную с возможностью осуществлять функции, описанные в варианте осуществления, или традиционные схемные компоненты.
Список номеров ссылок
[0080] 1a-1d - пешеходный переход
1A-1D - область пешеходного перехода
2A-2H - область тротуара
8a-8p - пешеход
9 - маршрут движения
10 - датчик обнаружения объектов
20 - схема извлечения пешеходов
30 - схема получения картографической информации
40 - схема получения информации рассматриваемого транспортного средства
60 - схема определения групп
70 - схема отслеживания
80 - схема вычисления
L1-L4 - намеченный путь
D1-D6 - пороговое значение.
Изобретение относится к способу отслеживания объектов и к устройству отслеживания объектов. Способ отслеживания объектов для отслеживания объектов во временных рядах с использованием датчика содержит этапы для обнаружения объектов около рассматриваемого транспортного средства. При обнаружении множества объектов вычисляют относительную позиционную взаимосвязь между рассматриваемым транспортным средством и каждым из множества объектов и степень влияния каждого из множества объектов на перемещение рассматриваемого транспортного средства на основе относительной позиционной взаимосвязи. Затем множество объектов сортируют в группы, число которых меньше, чем число объектов, в соответствии со степенью влияния. Каждую из групп отслеживают в качестве отдельного объекта во временных рядах. Повышается безопасность при движении транспортного средства. 2 н. и 5 з.п. ф-лы, 31 ил.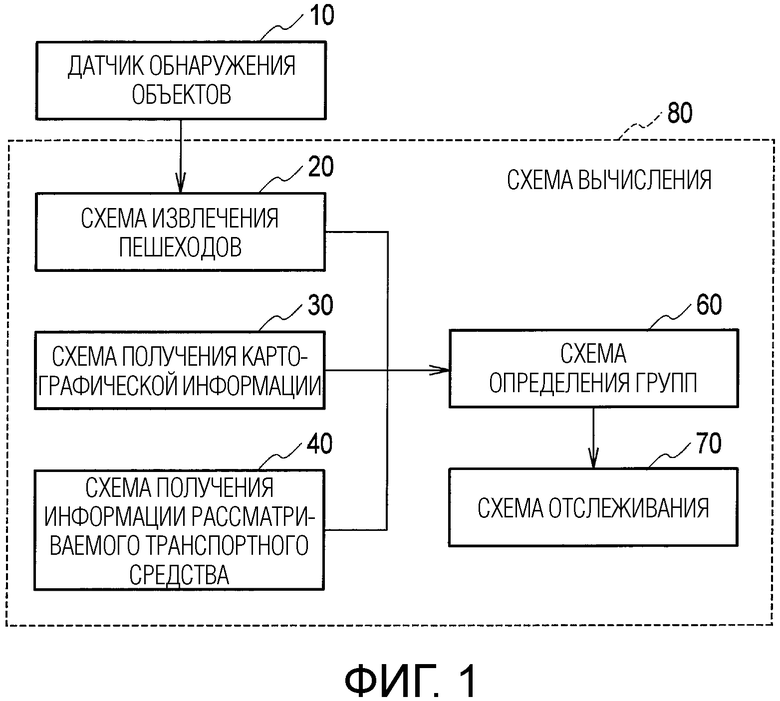
1. Способ отслеживания объектов для отслеживания объектов во временных рядах с использованием датчика для обнаружения объектов около рассматриваемого транспортного средства, при этом способ содержит этапы, на которых:
когда множество объектов обнаруживаются, вычисляют относительную позиционную взаимосвязь между рассматриваемым транспортным средством и каждым из множества объектов; и
вычисляют степень влияния каждого из множества объектов на перемещение рассматриваемого транспортного средства на основе относительной позиционной взаимосвязи; и
сортируют множество объектов в группы, число которых меньше, чем число объектов, в соответствии со степенью влияния;
отслеживают каждую из групп в качестве отдельного объекта во временных рядах.
2. Способ отслеживания объектов по п. 1, в котором по мере того, как степень влияния относительной позиционной взаимосвязи между рассматриваемым транспортным средством и объектами на перемещение рассматриваемого транспортного средства меньше, объекты, расположенные в более широкой области, сортируются в одну группу.
3. Способ отслеживания объектов по п. 2, в котором по мере того, как позиции объектов находятся дальше от маршрута движения рассматриваемого транспортного средства, степень влияния на перемещение рассматриваемого транспортного средства определяется, чтобы быть меньшей.
4. Способ отслеживания объектов по п. 2 или 3, в котором по мере того, как позиции объектов находятся дальше от рассматриваемого транспортного средства, степень влияния на перемещение рассматриваемого транспортного средства определяется, чтобы быть меньшей.
5. Способ отслеживания объектов по любому из пп. 1-4, в котором, когда множество объектов обнаруживаются, объекты сортируются в группы в соответствии со степенью влияния относительной позиционной взаимосвязи между рассматриваемым транспортным средством и объектами на перемещение рассматриваемого транспортного средства и величиной перемещения соответствующих объектов.
6. Способ отслеживания объектов по любому из пп. 1-5, в котором, когда множество объектов обнаруживаются, объекты сортируются в группы в соответствии со степенью влияния относительной позиционной взаимосвязи между рассматриваемым транспортным средством и объектами на перемещение рассматриваемого транспортного средства и степенью соблюдения правила дорожного движения, которого придерживаются позиции объектов.
7. Устройство отслеживания объектов, содержащее:
датчик для обнаружения объектов около рассматриваемого транспортного средства; и
схему вычисления для отслеживания объектов во временных рядах,
причем схема вычисления выполнена с возможностью, когда множество объектов обнаруживаются, вычислять относительную позиционную взаимосвязь между рассматриваемым транспортным средством и каждым из множества объектов, и вычислять степень влияния каждого из множества объектов на перемещение рассматриваемого транспортного средства на основе относительной позиционной взаимосвязи, и сортировать множество объектов в группы, число которых меньше, чем число объектов, в соответствии со степенью влияния; и отслеживать каждую из групп в качестве отдельного объекта во временных рядах.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| JP 2011081567 A, 21.04.2011 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА, СПОСОБ ИДЕНТИФИКАЦИИ АБОНЕНТОВ И ОПРЕДЕЛЕНИЯ ИХ МЕСТОПОЛОЖЕНИЯ И СИСТЕМА РАДИОСВЯЗИ АБОНЕНТОВ С ЦЕНТРАЛЬНОЙ СТАНЦИЕЙ С ИДЕНТИФИКАЦИЕЙ АБОНЕНТОВ И ОПРЕДЕЛЕНИЕМ ИХ МЕСТОПОЛОЖЕНИЯ | 1997 |
|
RU2126174C1 |

