Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способам прогнозирования поведения транспортного средства и к устройствам прогнозирования поведения транспортного средства.
Уровень техники
[0002] Традиционно известно устройство помощи при вождении для обнаружения информации относительно целевых транспортных средств, чтобы помогать водителям (патентный документ 1). Устройство помощи при вождении согласно патентному документу 1 прогнозирует полосу движения, в которой будет двигаться целевое транспортное средство, на основе обнаруженных предысторий движения целевого транспортного средства и определяет вероятность столкновения между рассматриваемым транспортным средством и целевым транспортным средством.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2013-134567
Сущность изобретения
Техническая задача
[0004] К сожалению, устройство помощи при вождении согласно патентному документу 1 не предполагает случай, в котором скорость транспортного средства для целевого транспортного средства является низкой. Поскольку иногда трудно получать такую информацию, как ориентация и предыстории движения, от целевого транспортного средства, перемещающегося на низкой скорости, возникает риск того, что полоса движения, в которой будет двигаться целевое транспортное средство, не может обнаруживаться.
[0005] Настоящее изобретение осуществлено в свете вышеуказанной проблемы, и его задача заключается в том, чтобы предоставлять способ прогнозирования поведения транспортного средства и устройство прогнозирования поведения транспортного средства, которые предоставляют повышенную точность при прогнозировании маршрута, по которому будет двигаться целевое транспортное средство, даже когда целевое транспортное средство перемещается на низкой скорости, и затруднительно получать ориентацию и предыстории движения целевого транспортного средства.
Решение задачи
[0006] Способ прогнозирования поведения транспортного средства согласно аспекту настоящего изобретения включает в себя: обнаружение позиции целевого транспортного средства около рассматриваемого транспортного средства, получение дорожной структуры около позиции целевого транспортного средства, включающей в себя по меньшей мере полосу движения; получение правила дорожного движения для дорожной структуры; и прогнозирование маршрута, по которому будет двигаться целевое транспортное средство, на основе правила дорожного движения.
Преимущества изобретения
[0007] Настоящее изобретение повышает точность при прогнозировании маршрута, по которому будет двигаться целевое транспортное средство, даже когда затруднительно обнаруживать ориентацию и предыстории движения целевого транспортного средства.
Краткое описание чертежей
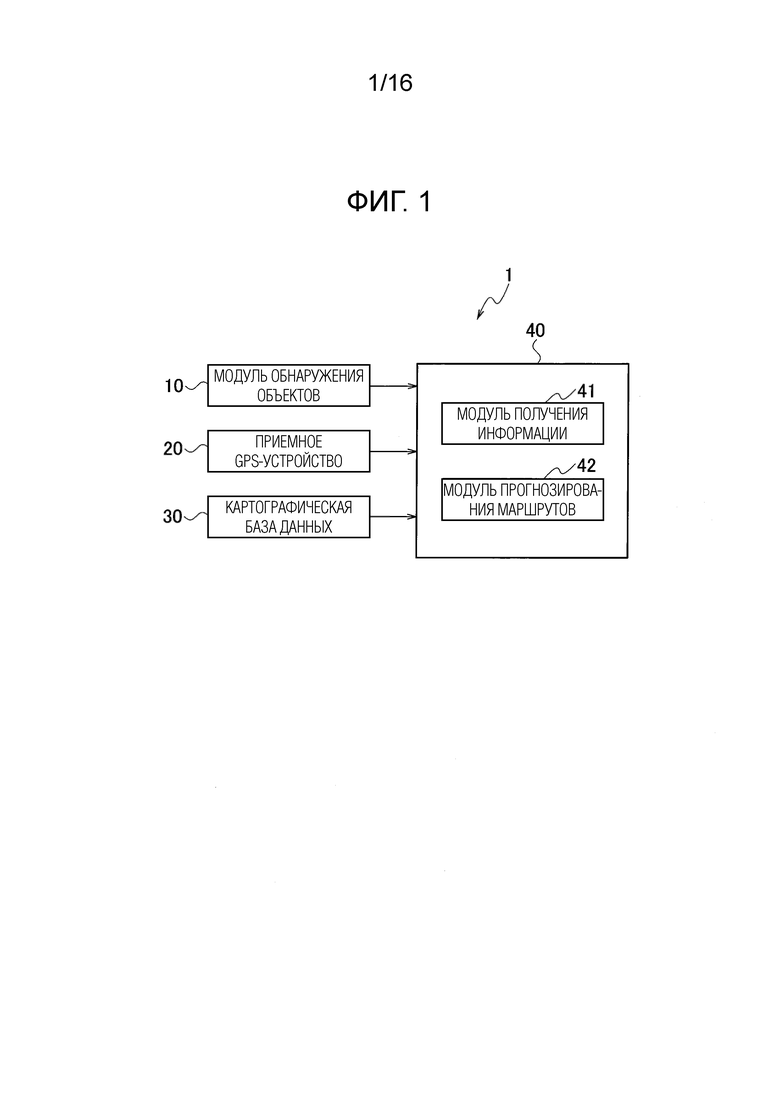
[0008] Фиг. 1 является схемой конфигурации устройства прогнозирования поведения транспортного средства согласно первому варианту осуществления настоящего изобретения.
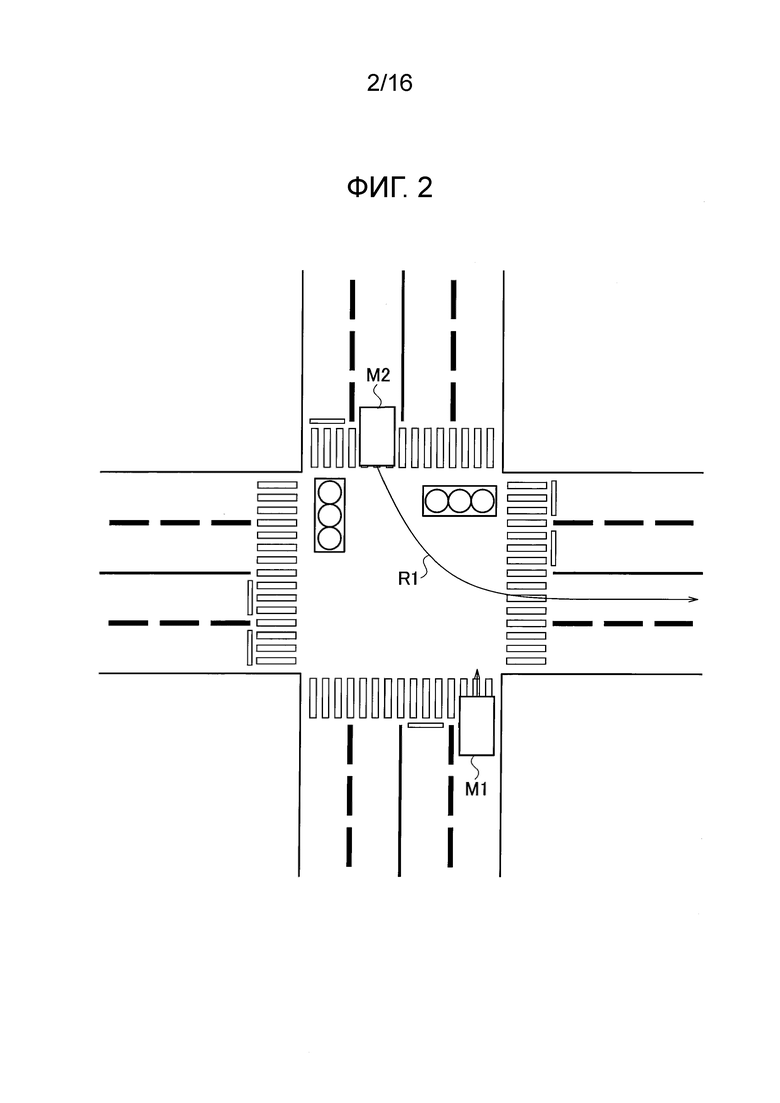
Фиг. 2 является схемой для пояснения примера работы устройства прогнозирования поведения транспортного средства согласно первому варианту осуществления настоящего изобретения.
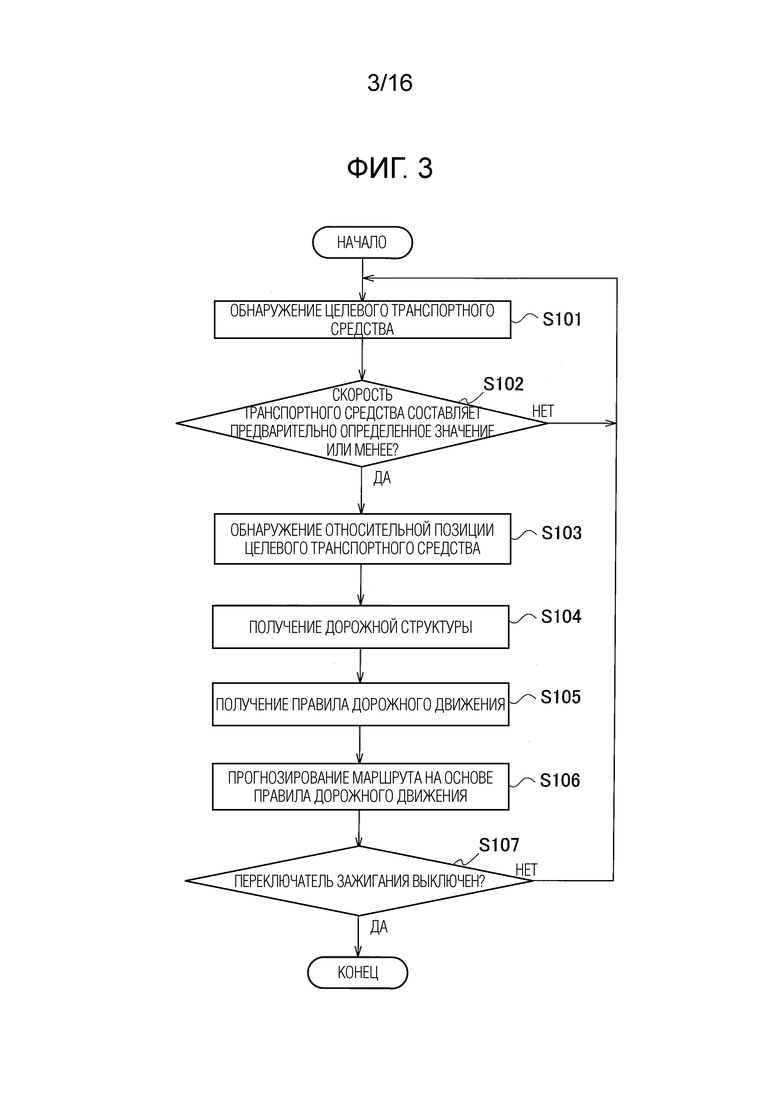
Фиг. 3 является блок-схемой последовательности операций способа для пояснения примера работы устройства прогнозирования поведения транспортного средства согласно первому варианту осуществления настоящего изобретения.
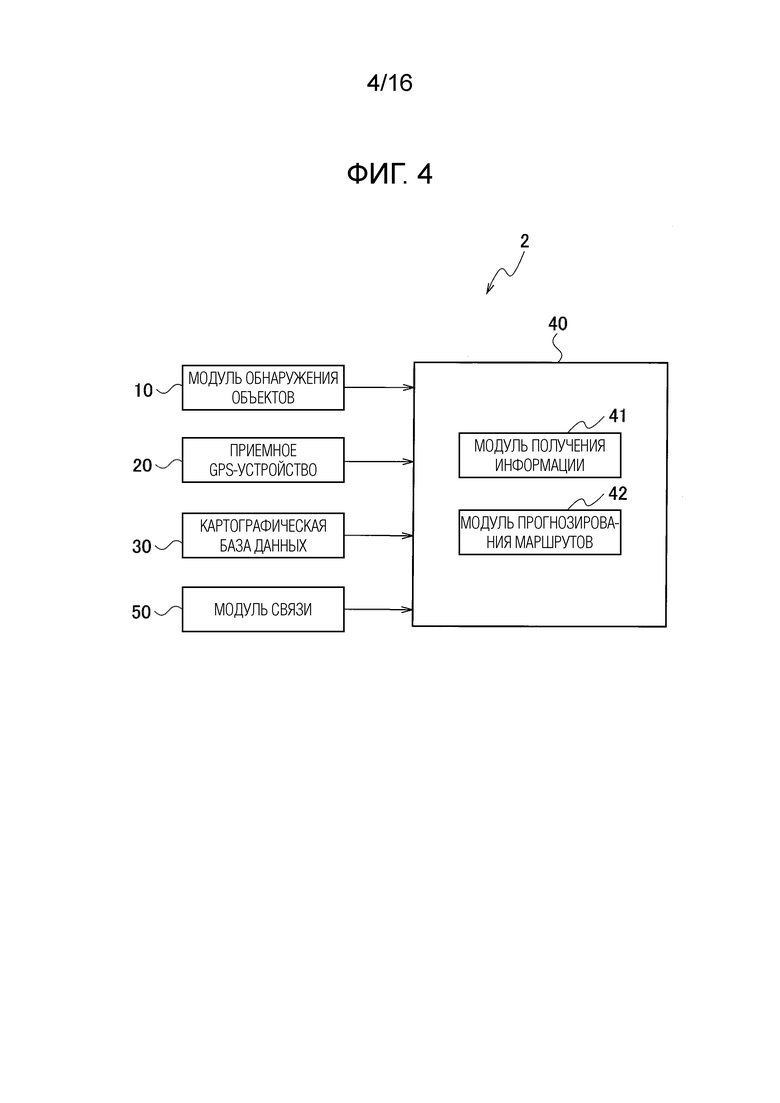
Фиг. 4 является схемой конфигурации устройства прогнозирования поведения транспортного средства согласно второму варианту осуществления настоящего изобретения.
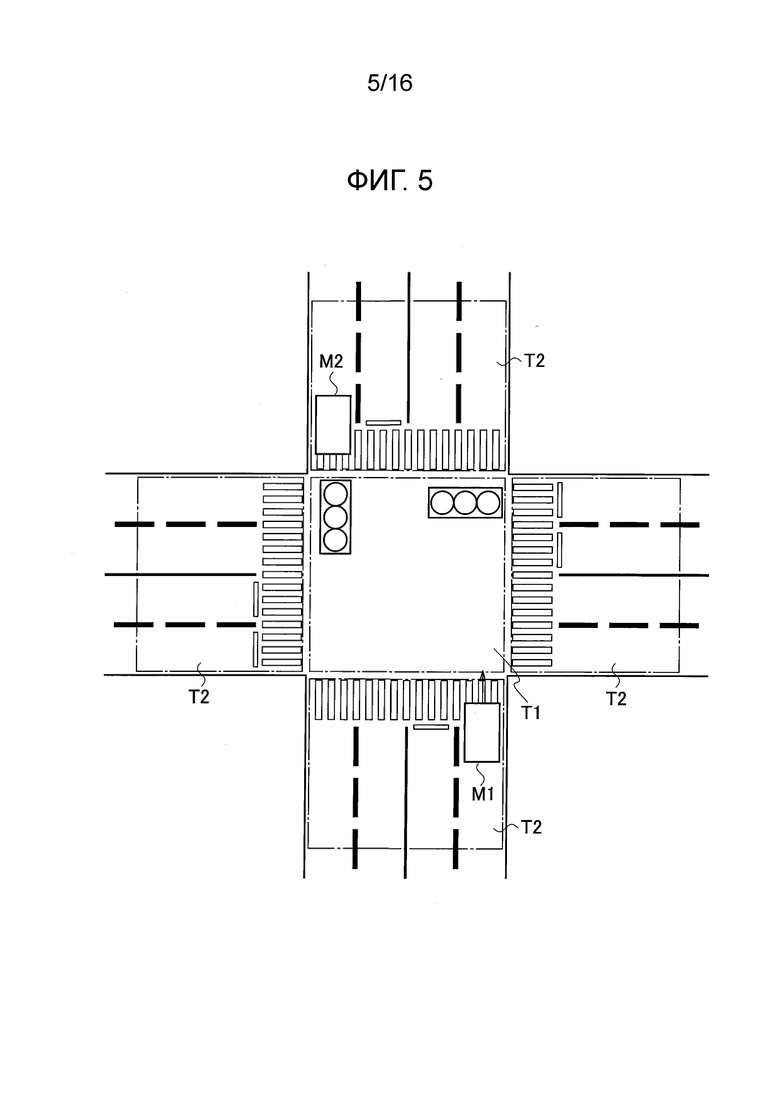
Фиг. 5 является схемой для пояснения областей перекрестка, согласно второму варианту осуществления настоящего изобретения.
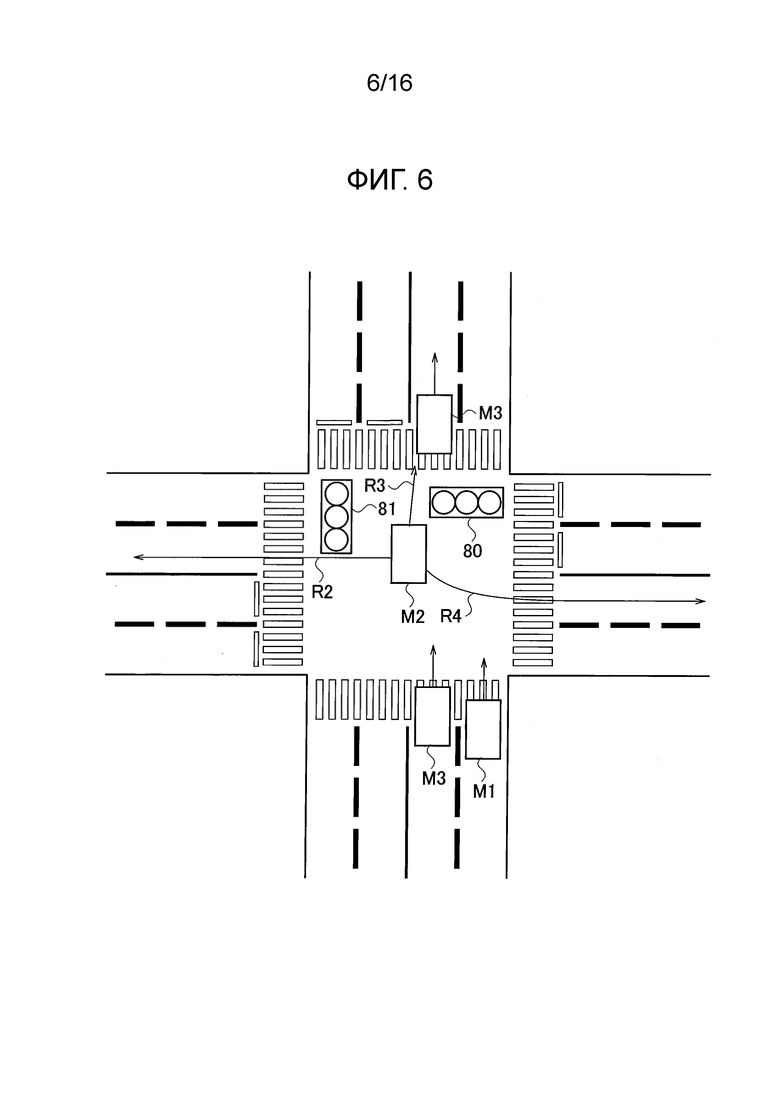
Фиг. 6 является схемой для пояснения примера работы устройства прогнозирования поведения транспортного средства согласно второму варианту осуществления настоящего изобретения.
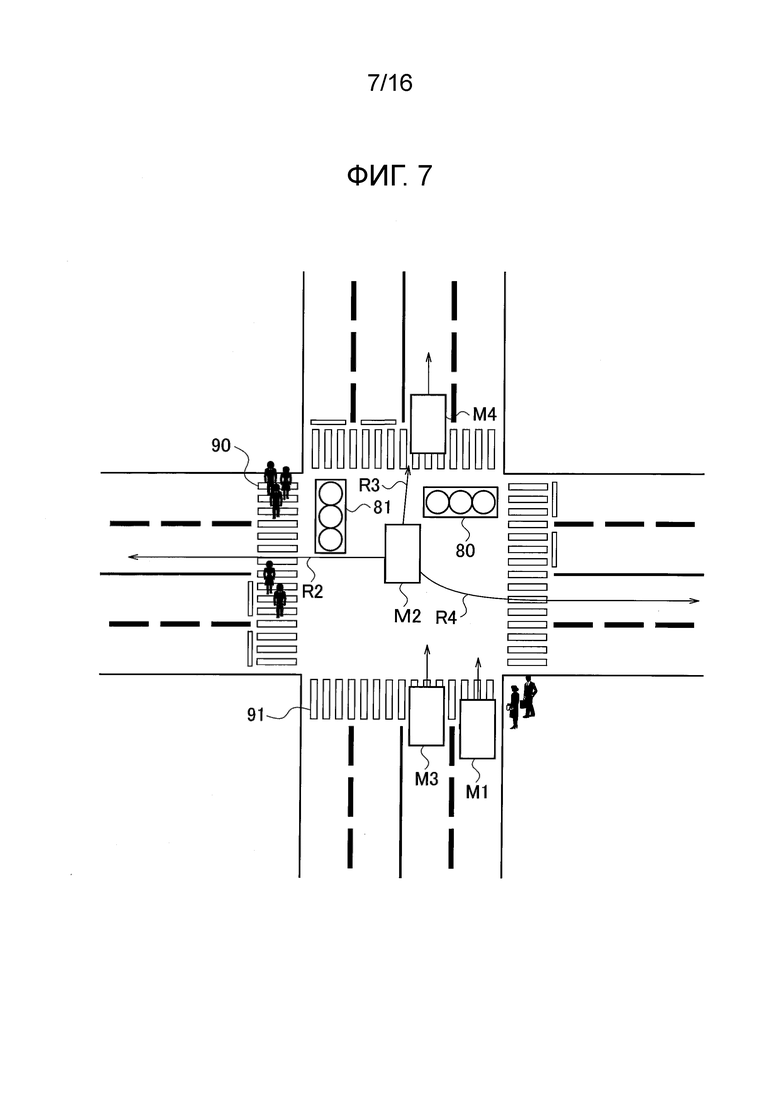
Фиг. 7 является схемой для пояснения другого примера работы устройства прогнозирования поведения транспортного средства согласно второму варианту осуществления настоящего изобретения.
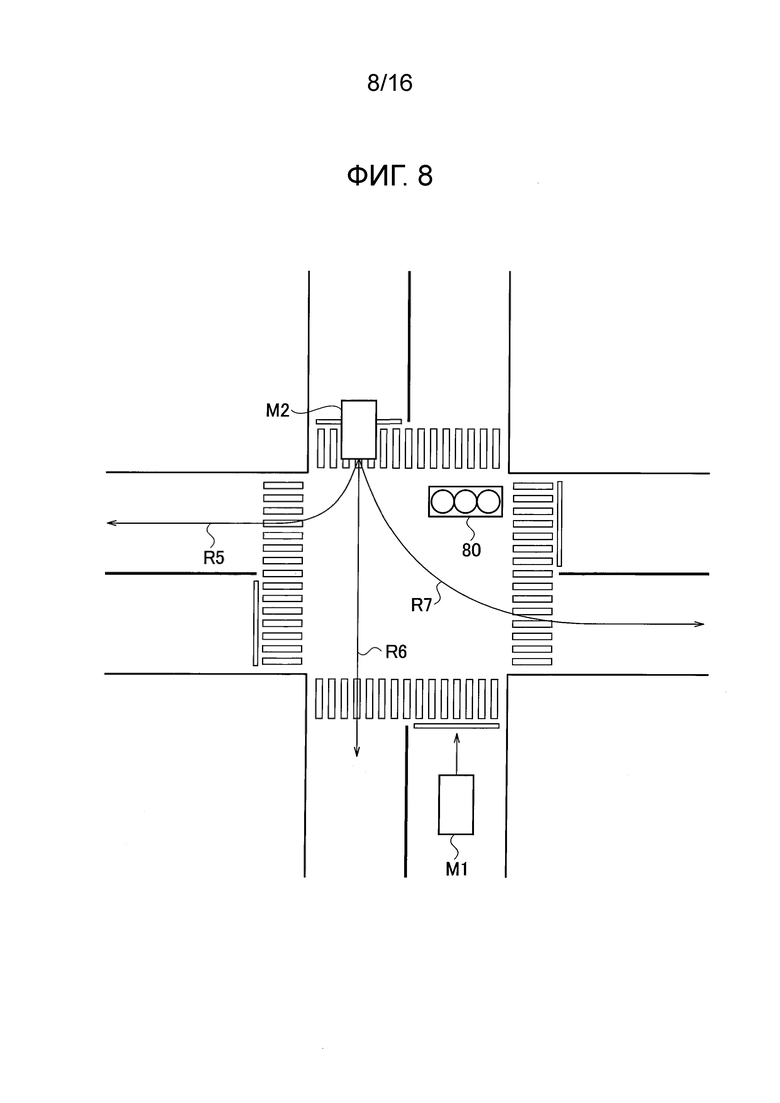
Фиг. 8 является схемой для пояснения другого примера работы устройства прогнозирования поведения транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 9 является схемой для пояснения другого примера работы устройства прогнозирования поведения транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 10 является таблицей, показывающей результаты сужения согласно второму варианту осуществления настоящего изобретения.
Фиг. 11 является таблицей, показывающей результаты сужения согласно второму варианту осуществления настоящего изобретения.
Фиг. 12 является схемой для пояснения другого примера работы устройства прогнозирования поведения транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 13 является схемой для пояснения другого примера работы устройства прогнозирования поведения транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 14 является блок-схемой последовательности операций способа для пояснения примера работы устройства прогнозирования поведения транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 15 является блок-схемой последовательности операций способа для пояснения примера работы устройства прогнозирования поведения транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 16 является блок-схемой последовательности операций способа для пояснения примера работы устройства прогнозирования поведения транспортного средства согласно второму варианту осуществления настоящего изобретения.
Фиг. 17 является схемой для пояснения примера работы устройства прогнозирования поведения транспортного средства согласно другому варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи. В описании чертежей, идентичные составляющие обозначаются посредством идентичных ссылок с номерами, и их описание опускается.
[0010] Первый вариант осуществления
Со ссылкой на фиг. 1, в дальнейшем описывается устройство 1 прогнозирования поведения транспортного средства согласно первому варианту осуществления. Как проиллюстрировано на фиг. 1, устройство 1 прогнозирования поведения транспортного средства включает в себя модуль 10 обнаружения объектов, приемное GPS-устройство 20, картографическую базу 30 данных и контроллер 40.
[0011] Модуль 10 обнаружения объектов представляет собой датчик, расположенный в рассматриваемом транспортном средстве для обнаружения объектов (пешеходов, велосипедов, мотоциклов и других транспортных средств) около рассматриваемого транспортного средства. Этот модуль используется для того, чтобы получать информацию относительно объектов, такую как скорости и позиции объектов около рассматриваемого транспортного средства. Описание в первом варианте осуществления основано на таком допущении, что модуль 10 обнаружения объектов представляет собой лазерный дальномер. Лазерный дальномер представляет собой датчик для того, чтобы определять расстояние и угол между рассматриваемым транспортным средством и объектами посредством сканирования лазерного света в пределах определенного диапазона углов, приема отраженного света в это время и обнаружения разности времен между временем лазерного излучения и временем приема отраженного света. Лазерный дальномер также обнаруживает относительные позиции и относительные расстояния объектов относительно рассматриваемого транспортного средства. Модуль 10 обнаружения объектов выводит обнаруженную информацию в контроллер 40. Следует отметить, что модуль 10 обнаружения объектов не ограничен лазерным дальномером и может представлять собой радар миллиметрового диапазона, ультразвуковой датчик или другой датчик.
[0012] Приемное GPS-устройство 20 обнаруживает текущую позицию рассматриваемого транспортного средства посредством приема радиоволн из спутников. Приемное GPS-устройство 20 выводит обнаруженную текущую позицию рассматриваемого транспортного средства в контроллер 40.
[0013] Картографическая база 30 данных сохраняет различные виды данных, которые требуются для навигации на основе инструкций по маршруту, такие как информация дороги и информация инфраструктурных объектов. Информация дороги включает в себя данные по дорожной структуре. Данные по дорожной структуре представляют собой данные по перекресткам, числу полос движения дорог, информации ширины дороги, полосам движения только с левым поворотом или полосам движения только с правым поворотом, сигналам светофора, пешеходным переходам, пешеходным мостам и т.п.
[0014] Картографическая база 30 данных также сохраняет правила дорожного движения относительно дорожных структур. Правила дорожного движения, например, означают правила, изложенные в законе, к примеру, такое правило, что транспортное средство должно подчиняться сигналу светофора, обращенного к полосе движения, в которой оно движется. Правила дорожного движения также включают в себя такие правила, что, когда сигнал является красным, транспортное средство не должно проезжать позицию остановки. Помимо этого, правила дорожного движения включают в себя правила, указываемые посредством дорожных знаков, таких как знак остановки, ограничение скорости, одностороннее движение, "въезд запрещен", "поворот запрещен" и т.п. Следует отметить, что информация дороги, правила дорожного движения и дорожные знаки не ограничены тем, что получается из картографической базы 30 данных, но он могут получаться посредством датчиков, предоставленных в рассматриваемом транспортном средстве M1, либо могут получаться с использованием связи между транспортными средствами или связи между транспортным средством и дорожной инфраструктурой.
[0015] Картографическая база 30 данных выводит информацию дороги и правила дорожного движения в контроллер 40 в ответ на запрос из контроллера 40. Следует отметить, что картографическая база 30 данных не должна обязательно сохраняться в рассматриваемом транспортном средстве, и картографическая база 30 данных может сохраняться на сервере. В случае если картографическая база 30 данных сохраняется на сервере, контроллер 40 обменивается данными с сервером, чтобы получать картографическую информацию по мере необходимости.
[0016] Контроллер 40 представляет собой схему, чтобы обрабатывать данные, полученные из модуля 10 обнаружения объектов, приемного GPS-устройства 20 и картографической базы 30 данных, и включает в себя, например, IC, LSI и другие части. Контроллер 40 может разделяться на модуль 41 получения информации и модуль 42 прогнозирования маршрутов с учетом своей функциональности.
[0017] Модуль 41 получения информации получает данные из модуля 10 обнаружения объектов, приемного GPS-устройства 20 и картографической базы 30 данных. Модуль 41 получения информации выводит полученные данные в модуль 42 прогнозирования маршрутов.
[0018] Модуль 42 прогнозирования маршрутов прогнозирует маршрут, по которому будет двигаться целевое транспортное средство, на основе данных, полученных из модуля 41 получения информации. Ниже описываются подробности модуля 42 прогнозирования маршрутов. Следует отметить, что прогнозный маршрут целевого транспортного средства включает в себя направление, область, полосу движения и т.п., в которой будет двигаться целевое транспортное средство с этого момента времени и далее, и может включать в себя все, что находится там, где будет двигаться целевое транспортное средство с этого момента времени и далее.
[0019] Далее, со ссылкой на фиг. 2, предоставляется описание для примера работы устройства 1 прогнозирования поведения транспортного средства. В первом варианте осуществления, предоставляется описание для окружения на перекрестке в качестве примера ситуации движения, как проиллюстрировано на фиг. 2.
[0020] Как проиллюстрировано на фиг. 2, когда модуль 10 обнаружения объектов обнаруживает целевое транспортное средство M2 около рассматриваемого транспортного средства M1, модуль 10 обнаружения объектов выводит позиционную информацию относительно целевого транспортного средства M2 в контроллер 40. Следует отметить, что целевое транспортное средство не ограничено автомобилем и т.п. и может представлять собой велосипед или мотоцикл, движущийся по дороге.
[0021] Когда модуль 42 прогнозирования маршрутов получает позиционную информацию относительно целевого транспортного средства M2, модуль 42 прогнозирования маршрутов оценивает то, составляет либо нет скорость транспортного средства для целевого транспортного средства M2 предварительно определенное значение или менее. Модуль 42 прогнозирования маршрутов может оценивать то, составляет либо нет скорость транспортного средства для целевого транспортного средства M2 предварительно определенное значение (например, 10 км/ч) или менее, также из относительной скорости и относительной позиции целевого транспортного средства M2 относительно рассматриваемого транспортного средства M1. Если модуль 42 прогнозирования маршрутов оценивает то, что скорость транспортного средства для целевого транспортного средства M2 составляет предварительно определенное значение или менее, модуль 42 прогнозирования маршрутов обращается к картографической базе 30 данных с использованием текущей позиции рассматриваемого транспортного средства M1, полученной из приемного GPS-устройства 20, и относительной позиции целевого транспортного средства M2 относительно рассматриваемого транспортного средства, и получает дорожную структуру около позиции целевого транспортного средства M2. Как проиллюстрировано на фиг. 2, модуль 42 прогнозирования маршрутов получает такую информацию, что дорожная структура около позиции целевого транспортного средства M2 представляет собой перекресток двух полос движения на одной стороне. Между тем, чем ниже скорость транспортного средства, тем меньше расстояние перемещения, затрудняя вычисление направления перемещения и получение ориентации целевого транспортного средства. Здесь, вместо оценки того, составляет либо нет скорость транспортного средства для целевого транспортного средства M2 предварительно определенное значение или менее, то, стоит или нет целевое транспортное средство M2 на месте, может использоваться для оценки. Это обеспечивает возможность прогнозирования ориентации целевого транспортного средства M2, даже когда целевое транспортное средство M2 стоит на месте, и затруднительно получать ориентацию целевого транспортного средства M2.
[0022] Затем, модуль 42 прогнозирования маршрутов обращается к картографической базе 30 данных, чтобы получать правила дорожного движения относительно полученной дорожной структуры. В частности, модуль 42 прогнозирования маршрутов получает правила дорожного движения относительно перекрестка, проиллюстрированного на фиг. 2. Здесь, допустим, что полоса движения, в которой позиционируется целевое транспортное средство M2, представляет собой полосу движения только с левым поворотом. В этом случае, правила дорожного движения запрещают целевому транспортному средству M2 ехать в любом направлении, за исключением поворота налево. Это обеспечивает возможность модулю 42 прогнозирования маршрутов оценивать то, что маршрут, по которому будет двигаться целевое транспортное средство M2, представляет собой маршрут R1 на левый поворот, как указывает стрелка на фиг. 2. Как описано выше, использование правил дорожного движения, когда модуль 42 прогнозирования маршрутов прогнозирует маршрут, по которому будет двигаться целевое транспортное средство M2, повышает точность при прогнозировании маршрута, по которому будет двигаться целевое транспортное средство M2. Следует отметить, что модуль 42 прогнозирования маршрутов может оценивать то, что полоса движения, в которой позиционируется целевое транспортное средство M2, представляет собой полосу движения только с левым поворотом, из дорожной структуры, полученной из картографической базы 30 данных.
[0023] Далее, со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 3, описывается пример работы устройства 1 прогнозирования поведения транспортного средства. Эта блок-схема последовательности операций способа начинается, когда переключатель зажигания включается.
[0024] На этапе S101, модуль 10 обнаружения объектов обнаруживает целевое транспортное средство около рассматриваемого транспортного средства M1.
[0025] На этапе S102, модуль 42 прогнозирования маршрутов оценивает то, составляет либо нет скорость транспортного средства для целевого транспортного средства M2, обнаруженного на этапе S101, предварительно определенное значение или менее. Если скорость транспортного средства для целевого транспортного средства M2 составляет предварительно определенное значение или менее ("Да" на этапе S102), процесс переходит к этапу S103. Если скорость транспортного средства для целевого транспортного средства M2 не составляет предварительно определенное значение или менее, процесс возвращается к этапу S101.
[0026] На этапе S103, приемное GPS-устройство 20 обнаруживает текущую позицию рассматриваемого транспортного средства M1, чтобы получать дорожную структуру в текущей позиции рассматриваемого транспортного средства M1. Затем устройство 1 прогнозирования поведения транспортного средства обнаруживает относительную позицию целевого транспортного средства M2 относительно рассматриваемого транспортного средства M1.
[0027] На этапе S104, модуль 42 прогнозирования маршрутов обращается к относительной позиции целевого транспортного средства M2 относительно рассматриваемого транспортного средства M1 и к картографической базе 30 данных и получает дорожную структуру около позиции целевого транспортного средства M2. Дорожная структура, например, представляет собой перекресток. Дорожная структура включает в себя, по меньшей мере, информацию относительно полос движения, такую как число полос движения и то, имеется или нет полоса движения только с левым поворотом или полоса движения только с правым поворотом.
[0028] На этапе S105, модуль 42 прогнозирования маршрутов получает правила дорожного движения относительно дорожной структуры. Причина получения правил дорожного движения состоит в том, что маршрут, по которому будет двигаться целевое транспортное средство M2, может прогнозироваться из правил дорожного движения в некоторых случаях.
[0029] На этапе S106, модуль 42 прогнозирования маршрутов прогнозирует маршрут, по которому будет двигаться целевое транспортное средство M2, на основе правил дорожного движения, применяемых к позиции целевого транспортного средства M2. В случае если полоса движения, в которой позиционируется целевое транспортное средство M2, представляет собой полосу движения только с левым поворотом или полосу движения только с правым поворотом, маршрут, по которому будет двигаться целевое транспортное средство M2, уникально определяется посредством правил дорожного движения, что обеспечивает возможность модулю 42 прогнозирования маршрутов прогнозировать маршрут, по которому будет двигаться целевое транспортное средство M2.
[0030] На этапе S107, контроллер 40 оценивает то, выключен или нет переключатель зажигания. Если переключатель зажигания выключен ("Да" на этапе S107), последовательность процессов завершается. Если переключатель зажигания не выключен ("Нет" на этапе S107), процесс возвращается к этапу S101. Следует отметить, что в случае, если устройство 1 прогнозирования поведения транспортного средства имеет функцию обнаружения пути для транспортных средств для целевого транспортного средства M2, и когда оно обнаруживает путь для транспортных средств, устройство 1 прогнозирования поведения транспортного средства может прогнозировать маршрут движения целевого транспортного средства M2 из пути для транспортных средств. Помимо этого, комбинирование прогнозирования на основе правил дорожного движения и прогнозирования на основе пути для транспортных средств при прогнозировании маршрута движения целевого транспортного средства повышает точность прогнозирования.
[0031] Как описано выше, устройство 1 прогнозирования поведения транспортного средства согласно первому варианту осуществления предоставляет следующее функциональное преимущество.
[0032] Когда устройство 1 прогнозирования поведения транспортного средства обнаруживает целевое транспортное средство M2 около рассматриваемого транспортного средства M1, устройство 1 прогнозирования поведения транспортного средства получает позицию целевого транспортного средства M2 и позицию рассматриваемого транспортного средства M1. Устройство 1 прогнозирования поведения транспортного средства обращается к позиции целевого транспортного средства M2 и к картографической базе 30 данных, чтобы получать дорожную структуру, по меньшей мере, включающую в себя полосы движения около позиции целевого транспортного средства M2, и затем получает правила дорожного движения относительно полученной дорожной структуры. После этого, устройство 1 прогнозирования поведения транспортного средства прогнозирует маршрут, по которому будет двигаться целевое транспортное средство M2, на основе правил дорожного движения. Это позволяет устройству 1 прогнозирования поведения транспортного средства повышать точность при прогнозировании маршрута, по которому будет двигаться целевое транспортное средство M2, даже когда затруднительно обнаруживать ориентацию и предыстории движения целевого транспортного средства M2.
[0033] Когда устройство 1 прогнозирования поведения транспортного средства обнаруживает целевое транспортное средство M2 около рассматриваемого транспортного средства M1, оно определяет скорость транспортного средства для целевого транспортного средства M2 с помощью модуля 10 обнаружения объектов. Затем, если скорость транспортного средства для целевого транспортного средства M2 составляет предварительно определенное значение или менее, устройство 1 прогнозирования поведения транспортного средства прогнозирует маршрут, по которому будет двигаться целевое транспортное средство M2. Эта операция дополнительно повышает точность устройства 1 прогнозирования поведения транспортного средства при прогнозировании маршрута, по которому будет двигаться целевое транспортное средство M2, когда скорость транспортного средства для целевого транспортного средства M2 составляет предварительно определенное значение или менее, даже когда затруднительно обнаруживать ориентацию и предыстории движения целевого транспортного средства M2.
[0034] Устройство 1 прогнозирования поведения транспортного средства обнаруживает путь движения целевого транспортного средства M2 и прогнозирует маршрут, по которому будет двигаться целевое транспортное средство M2, на основе пути движения и правил дорожного движения. Эта операция позволяет прогнозировать маршрут, по которому будет двигаться целевое транспортное средство M2, посредством комбинирования прогнозирования на основе пути движения с прогнозированием на основе правил дорожного движения, что дополнительно повышает точность при прогнозировании маршрута, по которому будет двигаться целевое транспортное средство M2.
[0035] Второй вариант осуществления
Далее, со ссылкой на фиг. 4, предоставляется описание для устройства 2 прогнозирования поведения транспортного средства согласно второму варианту осуществления. Как проиллюстрировано на фиг. 4, второй вариант осуществления отличается от первого варианта осуществления тем, что устройство 2 прогнозирования поведения транспортного средства включает в себя модуль 50 связи. Составляющие, идентичные составляющим в первом варианте осуществления, обозначаются посредством идентичных ссылок с номерами, и их описание опускается. Таким образом, в дальнейшем описание предоставляется главным образом касательно различий.
[0036] Модуль 50 связи представляет собой устройство, которое осуществляет беспроводную связь с придорожными устройствами связи, расположенными на обочинах. Придорожное устройство связи передает информацию инфраструктуры в транспортные средства, движущиеся в области связи, в которой располагается устройство. Информация инфраструктуры включает в себя, например, информацию светофоров относительно состояний подсвечивания сигналов светофора. Модуль 50 связи выводит информацию светофоров, полученную из придорожного устройства связи, в модуль 41 получения информации. Следует отметить, что информация светофоров может получаться с использованием датчиков, расположенных в транспортном средстве, связи между транспортными средствами и связи между транспортным средством и дорожной инфраструктурой.
[0037] Далее, со ссылкой на фиг. 5-9, предоставляется описание для примера работы устройства 2 прогнозирования поведения транспортного средства. Кроме того, во втором варианте осуществления, предоставляется описание для окружения на перекрестке в качестве примера ситуации движения аналогично первому варианту осуществления. Во втором варианте осуществления, как проиллюстрировано на фиг. 5, модуль 42 прогнозирования маршрутов оценивает то, находится позиция целевого транспортного средства M2 внутри или за пределами перекрестка. Внутри перекрестка означает область T1, в которой текущая полоса движения пересекается с пересекающейся полосой движения, как проиллюстрировано на фиг. 5. За пределами перекрестка означает области T2 около перекрестка, исключая область T1, как проиллюстрировано на фиг. 5. Следует отметить, что определения внутри и за пределами перекрестка не ограничены означенным. Например, внутри перекрестка может задаваться как область, которая находится внутри перекрестка и за рамками стоп-линий или пешеходных переходов. Следует отметить, что на чертежах после фиг. 5, иллюстрация области T1 и областей T2 опускается.
[0038] Далее, со ссылкой на фиг. 6, предоставляется описание для случая, в котором целевое транспортное средство M2 движется внутри перекрестка (в области T1, проиллюстрированной на фиг. 5) на скорости транспортного средства в предварительно определенное значение или менее. Как проиллюстрировано на фиг. 6, когда модуль 10 обнаружения объектов обнаруживает целевое транспортное средство M2, позиционированное внутри перекрестка, модуль 42 прогнозирования маршрутов извлекает несколько возможных вариантов маршрута, по которым может двигаться целевое транспортное средство M2, на основе позиции целевого транспортного средства M2 и дорожной структуры. В это время, модуль 42 прогнозирования маршрутов извлекает, в качестве возможных вариантов маршрутов, маршруты в пределах определенного расстояния от целевого транспортного средства M2, например, в пределах 1 м. Из дорожной структуры, проиллюстрированной на фиг. 6, три маршрута извлекаются в качестве возможных вариантов маршрутов. В частности, модуль 42 прогнозирования маршрутов извлекает три возможных варианта маршрутов: прямой маршрут R2, который идет по прямой в направлении, пересекающем направление движения рассматриваемого транспортного средства M1, прямой маршрут R3, который идет по прямой в направлении, идентичном направлению движения рассматриваемого транспортного средства M1, и маршрут R4 на левый поворот, который поворачивает налево в направлении, пересекающем направление движения рассматриваемого транспортного средства M1.
[0039] Затем, модуль 42 прогнозирования маршрутов сужает три извлеченных возможных вариантов маршрутов с использованием правил дорожного движения и условий движения. Во-первых, модуль 42 прогнозирования маршрутов оценивает то, составляет либо нет интенсивность трафика в возможном варианте маршрута предварительно определенной величину или более. Например, как проиллюстрировано на фиг. 6, в случае если предусмотрены другие транспортные средства M3 и M4, движущиеся по прямому маршруту R3, и в силу этого, если интенсивность трафика по прямом маршруте R3 составляет предварительно определенную величину или более, вероятность того, что маршрут, по которому будет двигаться целевое транспортное средство M2, представляет собой прямой маршрут R3, является низкой. Это обусловлено тем, что если целевое транспортное средство M2 следует прямым маршрутом R3, вероятность того, что скорость транспортного средства становится низкой, является низкой, и если так, целевое транспортное средство M2 затрудняет поток трафика. Таким образом, модуль 42 прогнозирования маршрутов исключает прямой маршрут R3 из возможных вариантов. Здесь, то, что интенсивность трафика составляет предварительно определенную величину или более, означает случай, в котором пять или более транспортных средств проезжают в этой точке в течение 30 секунд. Следует отметить, что хотя в настоящем варианте осуществления, возможный вариант исключен, чтобы прогнозировать маршрут движения, способ не ограничен этим. Маршрут, по которому будет двигаться целевое транспортное средство M2, может прогнозироваться посредством вычисления правдоподобия (вероятности) того, что целевое транспортное средство M2 может двигаться по каждому возможному варианту маршрута, и регулирования правдоподобия. В случае если правдоподобие используется для того, чтобы прогнозировать маршрут, по которому будет двигаться целевое транспортное средство M2, например, когда предусмотрены транспортные средства M3 и M4, движущиеся по прямому маршруту R3, как проиллюстрировано на фиг. 6, и в силу этого, когда интенсивность по прямом маршруте R3 составляет предварительно определенную величину или более, вероятность того, что маршрут, по которому будет двигаться целевое транспортное средство M2, представляет собой прямой маршрут R3, является низкой. Таким образом, модуль 42 прогнозирования маршрутов задает низкой правдоподобие движения по прямому маршруту R3. Альтернативно, модуль 42 прогнозирования маршрутов задает высокими правдоподобия движения по другим возможным вариантам маршрутов. Маршрут, по которому будет двигаться целевое транспортное средство M2, может прогнозироваться таким образом.
[0040] Затем, модуль 42 прогнозирования маршрутов сужает возможные варианты маршрутов с использованием информации светофоров, полученной из модуля 50 связи. Когда сигнал 80 светофора для направления движения рассматриваемого транспортного средства M1 является зеленым, и сигнал 81 светофора для направления, пересекающего направление движения рассматриваемого транспортного средства M1, является красным, как проиллюстрировано на фиг. 6, вероятность того, что маршрут, по которому будет двигаться целевое транспортное средство M2, представляет собой прямой маршрут R2, является низкой. Поскольку сигнал 81 светофора является красным, вероятность того, что когда целевое транспортное средство M2 следует прямым маршрутом R2, целевое транспортное средство M2 находится в состоянии стояния на месте около центра перекрестка, является низкой, с точки зрения правил дорожного движения. Если скорость транспортного средства для целевого транспортного средства M2 становится низкой вследствие сигнала 81 светофора, вероятно, что целевое транспортное средство M2 останавливается перед стоп-линией. Таким образом, модуль 42 прогнозирования маршрутов исключает прямой маршрут R2 из возможных вариантов. Теперь, поскольку два возможных варианта из трех возможных вариантов маршрутов исключены посредством этих процессов, модуль 42 прогнозирования маршрутов прогнозирует то, что маршрут R4 на левый поворот, который представляет собой оставшийся возможный вариант маршрута, представляет собой маршрут, по которому будет двигаться целевое транспортное средство M2.
[0041] Следует отметить, что в случае, если модуль 42 прогнозирования маршрутов не может получать информацию светофоров, модуль 42 прогнозирования маршрутов может сужать возможные варианты маршрутов с использованием информации пешеходов относительно пешеходных переходов. Информация пешеходов относительно пешеходных переходов представляет собой информацию относительно пешеходов, идущих по пешеходным переходам, и информацию относительно пешеходов, стоящих перед пешеходными переходами. Как проиллюстрировано на фиг. 7, в случае если пешеходы идут по пешеходному переходу 90, расположенному на прямом маршруте R2, и пешеходы стоят перед пешеходным переходом 91, расположенным на маршруте направления движения рассматриваемого транспортного средства M1, модуль 42 прогнозирования маршрутов из перемещения пешеходов предполагает то, что сигнал 80 светофора для направления движения рассматриваемого транспортного средства M1 является зеленым, и то, что сигнал 81 светофора для направления, пересекающего направление движения рассматриваемого транспортного средства M1, является красным. Таким образом, использование информации пешеходов обеспечивает возможность модулю 42 прогнозирования маршрутов предполагать информацию светофоров, даже когда модуль 42 прогнозирования маршрутов не может получать информацию светофоров. Затем модуль 42 прогнозирования маршрутов может исключать прямой маршрут R2 из возможных вариантов маршрутов с использованием предполагаемой информации светофоров. Модуль 42 прогнозирования маршрутов может использовать информацию пешеходов также в случае получения информации светофоров. Другими словами, модуль 42 прогнозирования маршрутов может сужать возможные варианты маршрутов и с использованием информации светофоров и с использованием информации пешеходов.
[0042] Далее предоставляется описание со ссылкой на фиг. 8 для случая, в котором целевое транспортное средство M2 позиционируется за пределами перекрестка (в области T2, проиллюстрированной на фиг. 5), и в котором скорость транспортного средства составляет предварительно определенное значение или менее. Как проиллюстрировано на фиг. 8, в случае если модуль 10 обнаружения объектов обнаруживает целевое транспортное средство M2, позиционированное за пределами перекрестка, модуль 42 прогнозирования маршрутов обращается к относительной позиции целевого транспортного средства M2 относительно рассматриваемого транспортного средства M1 и к картографической базе 30 данных и получает дорожную структуру около позиции целевого транспортного средства M2. Как проиллюстрировано на фиг. 8, модуль 42 прогнозирования маршрутов получает такую информацию, что дорожная структура в позиции целевого транспортного средства M2 представляет собой перекресток одной полосы движения на одной стороне. Затем, модуль 42 прогнозирования маршрутов извлекает несколько возможных вариантов маршрута, по которым может двигаться целевое транспортное средство M2, на основе позиции целевого транспортного средства M2 и дорожной структуры. Из дорожной структуры, проиллюстрированной на фиг. 8, три маршрута извлекаются в качестве возможных вариантов маршрутов. В частности, модуль 42 прогнозирования маршрутов извлекает три возможных варианта маршрутов: маршрут R5 на правый поворот, который поворачивает направо в направлении, пересекающем направление движения рассматриваемого транспортного средства M1, прямой маршрут R6, который идет по прямой в направлении, противоположном направлению движения рассматриваемого транспортного средства M1, и маршрут R7 на левый поворот, который поворачивает налево в направлении, пересекающем направление движения рассматриваемого транспортного средства M1.
[0043] Затем, модуль 42 прогнозирования маршрутов сужает три извлеченных возможных вариантов маршрутов с использованием правил дорожного движения и условий движения. В частности, модуль 42 прогнозирования маршрутов, во-первых, сужает возможные варианты маршрутов с использованием условий движения около рассматриваемого транспортного средства M1, полученных из модуля 10 обнаружения объектов, информация светофоров. Условия движения около рассматриваемого транспортного средства M1, полученные из значения модуля 10 обнаружения объектов, означают, например, состояние затора в движении, а также то, присутствуют или нет пешеходы на пешеходных переходах. В случае если сигнал 80 светофора для направления движения рассматриваемого транспортного средства M1 является зеленым, и если отсутствуют другие транспортные средства около рассматриваемого транспортного средства M1, что означает то, что отсутствует затор в движении, как проиллюстрировано на фиг. 8, модуль 42 прогнозирования маршрутов исключает прямой маршрут R6 из возможных вариантов. Это обусловлено тем, что при условиях движения, проиллюстрированных на фиг. 8, если целевое транспортное средство M2 хочет следовать прямым маршрутом R6, оно должно уже достигать этого. То, что несмотря на это, целевое транспортное средство M2 перемещается медленно за пределами перекрестка, означает то, что вероятность того, что маршрут, которым хочет следовать целевое транспортное средство M2, представляет собой маршрут R5 на правый поворот или маршрут R7 на левый поворот, является высокой.
[0044] Затем, модуль 42 прогнозирования маршрутов сужает возможные варианты маршрутов, по которым может двигаться целевое транспортное средство M2, до одного из маршрута R5 на правый поворот и маршрута R7 на левый поворот. Здесь, если маршрут, по которому будет двигаться целевое транспортное средство M2, представляет собой маршрут R7 на левый поворот, поскольку отсутствует затор в движении около рассматриваемого транспортного средства M1, как проиллюстрировано на фиг. 8, вероятность того, что целевое транспортное средство M2 перемещается на перекресток и замедляется в позиции, в которой оно может легко поворачивать, является высокой. То, что несмотря на это, целевое транспортное средство M2 замедляется за пределами перекрестка, означает то, что вероятность того, что маршрут, которым хочет следовать целевое транспортное средство M2, представляет собой маршрут R5 на правый поворот, является высокой. Таким образом, модуль 42 прогнозирования маршрутов исключает маршрут R7 на левый поворот из возможных вариантов маршрутов и прогнозирует то, что маршрут R5 на правый поворот, который представляет собой оставшийся возможный вариант, представляет собой маршрут, по которому будет двигаться целевое транспортное средство M2.
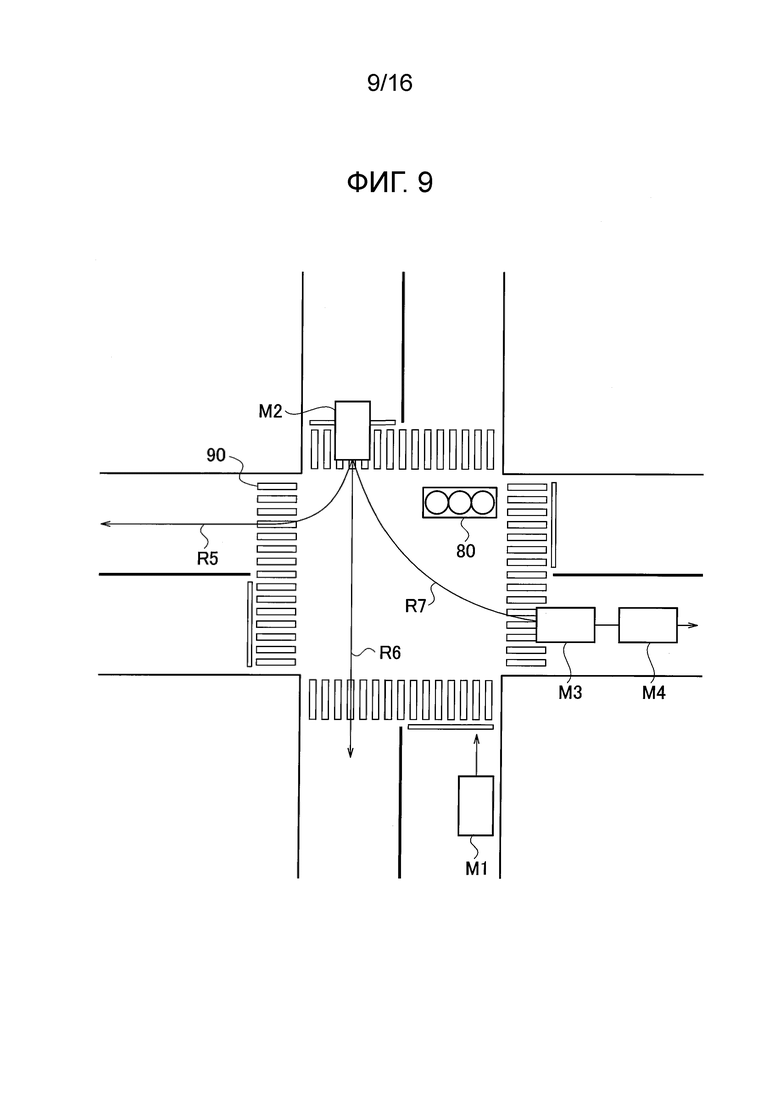
[0045] С другой стороны, в случае если транспортные средства M3 и M4 находятся в состоянии стояния на месте (или перемещаются медленно) на маршруте R7 на левый поворот, и отсутствует свободное пространство после транспортного средства M3, как проиллюстрировано на фиг. 9, модуль 42 прогнозирования маршрутов оценивает то, что затор в движении возникает на маршруте R7 на левый поворот. В случае если имеется затор в движении на маршруте R7 на левый поворот, как описано выше, и целевое транспортное средство M2 хочет следовать маршрутом R7 на левый поворот, целевое транспортное средство M2 обычно должно останавливаться за пределами перекрестка. Это обусловлено тем, что если целевое транспортное средство M2 перемещается на перекресток в этой ситуации, и сигнал изменяется до того, как разрешается затор в движении, целевое транспортное средство M2 затрудняет трафик в пересекающейся полосе движения. Другими словами, при условиях движения, проиллюстрированных на фиг. 9, возникают случаи, когда даже если модуль 42 прогнозирования маршрутов использует позиционную информацию других транспортных средств, модуль 42 прогнозирования маршрутов не может прогнозировать то, представляет маршрут, по которому будет двигаться целевое транспортное средство M2, собой маршрут R5 на правый поворот или маршрут R7 на левый поворот.
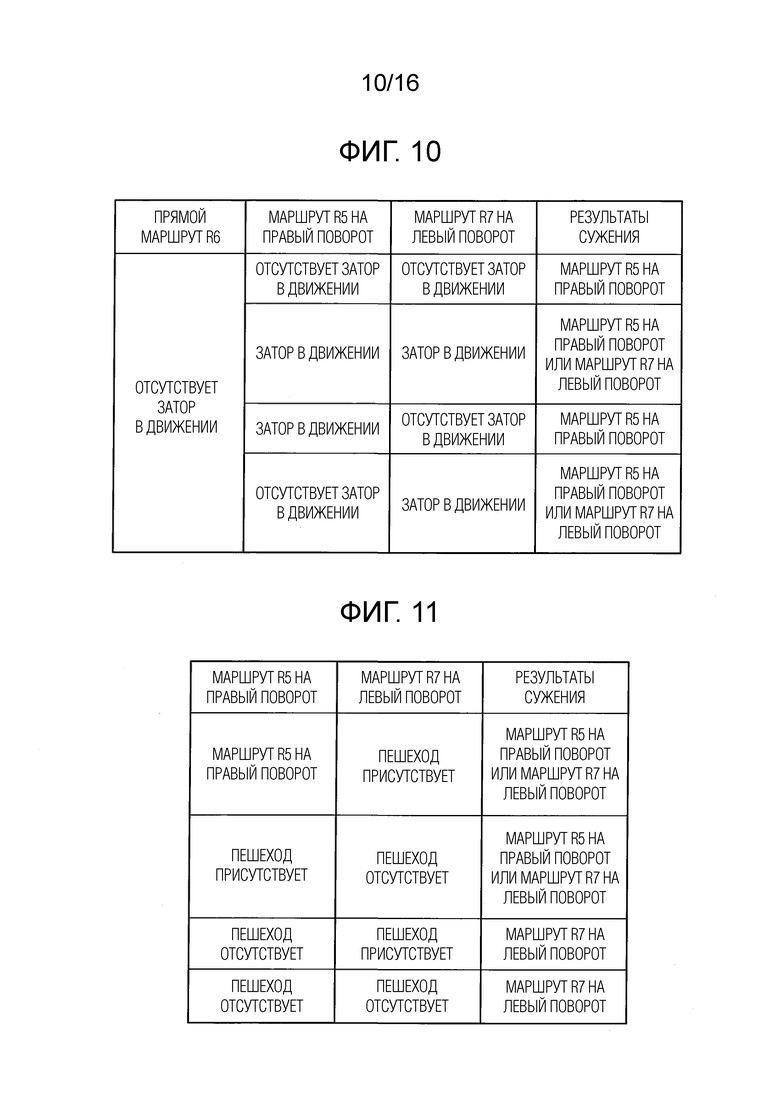
[0046] Чтобы разрешать эту ситуацию, модуль 42 прогнозирования маршрутов использует информацию пешеходов относительно пешеходных переходов с тем, чтобы сужать возможные варианты маршрутов. В случае если отсутствуют пешеходы на пешеходном переходе 90, пересекающем маршрут R5 на правый поворот, как проиллюстрировано на фиг. 9, модуль 42 прогнозирования маршрутов исключает маршрут R5 на правый поворот из возможных вариантов маршрутов и прогнозирует то, что маршрут R7 на левый поворот представляет собой маршрут, по которому будет двигаться целевое транспортное средство M2. Причина состоит в том, что поскольку отсутствует затор в движении на маршруте R5 на правый поворот, и помимо этого, на пешеходном переходе 90, пересекающем маршрут R5 на правый поворот, отсутствуют пешеходы, если целевое транспортное средство M2 хочет следовать маршрутом R5 на правый поворот, оно должно уже достигать этого. То, что несмотря на это, целевое транспортное средство M2 перемещается медленно за пределами перекрестка, означает то, что маршрут, которым хочет следовать целевое транспортное средство M2, представляет собой маршрут R7 на левый поворот. Результаты сужения возможных вариантов маршрутов с использованием состояния затора в движении и информации пешеходов, как описано выше, показаны на фиг. 10 и 11. Фиг. 10 показывает результаты сужения возможных вариантов маршрутов с использованием информации в отношении того, имеется или нет затор в движении на маршруте R5 на правый поворот и маршруте R7 на левый поворот в случае, если на прямом маршруте R6 отсутствует затор в движении. Фиг. 11 показывает результаты сужения возможных вариантов маршрутов с использованием информации пешеходов в случае, если отсутствует затор в движении на маршруте R5 на правый поворот и имеется затор в движении на маршруте R7 на левый поворот на фиг. 10 (самый нижний случай, показанный на фиг. 10). Следует отметить, что хотя в примерах, показанных на фиг. 10 и 11, модуль 42 прогнозирования маршрутов сужает возможные варианты маршрутов посредством оценки состояния затора в движении и затем использования информации пешеходов, способ не ограничен этим. Модуль 42 прогнозирования маршрутов может сужать возможные варианты маршрутов посредством использования информации пешеходов и затем оценки состояния затора в движении.
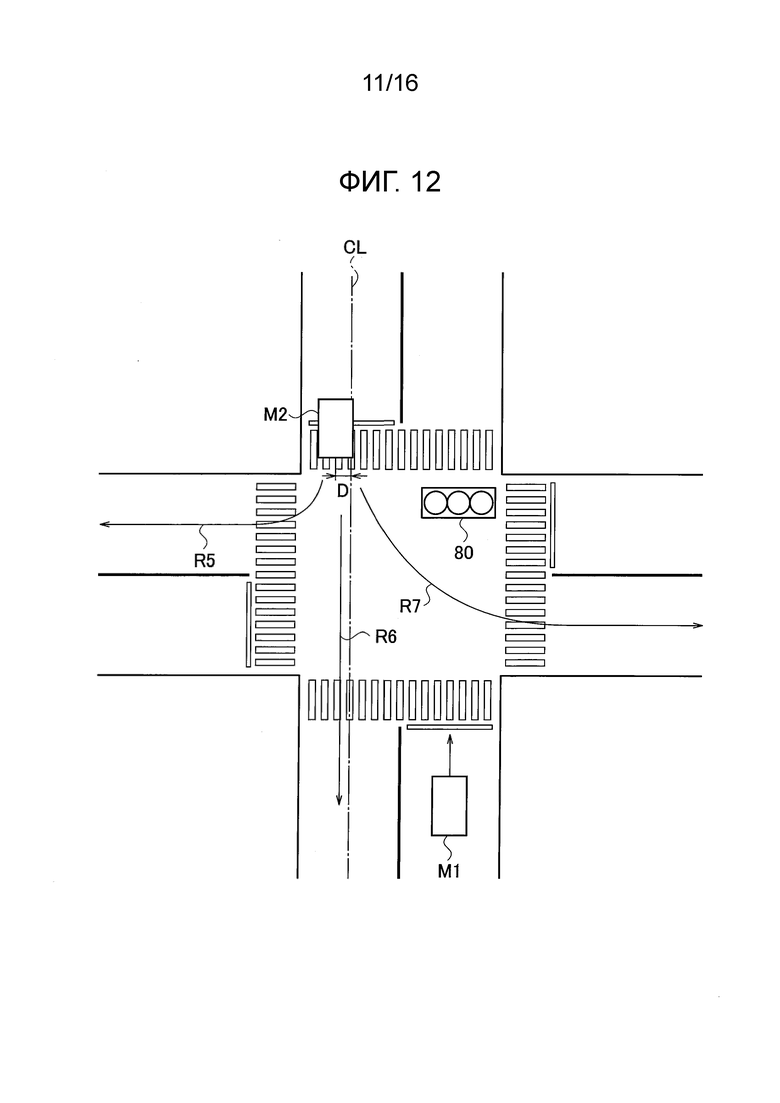
[0047] Как показано на фиг. 10 и 11, возникают случаи, когда даже если состояние затора в движении и информация пешеходов используется, невозможно прогнозировать то, представляет маршрут, по которому будет двигаться целевое транспортное средство M2, собой маршрут R5 на правый поворот или маршрут R7 на левый поворот. В этих случаях, модуль 42 прогнозирования маршрутов использует позицию целевого транспортного средства M2 относительно центральной линии CL полосы движения, как проиллюстрировано на фиг. 12, с тем чтобы сужать возможные варианты маршрутов.
[0048] В частности, как проиллюстрировано на фиг. 12, модуль 42 прогнозирования маршрутов вычисляет расстояние D от центральной линии CL полосы движения, в которой позиционируется целевое транспортное средство M2, до центральной позиции целевого транспортного средства M2. Центральная позиция целевого транспортного средства M2 означает центральную позицию ширины транспортного средства. Модуль 42 прогнозирования маршрутов вычисляет расстояние D с использованием ширины транспортного средства для целевого транспортного средства M2, полученной посредством модуля 10 обнаружения объектов. Затем модуль 42 прогнозирования маршрутов сужает возможные варианты маршрутов с использованием вычисленного расстояния D. Правила дорожного движения требуют от водителей перемещения своих транспортных средств близко к правому или левому краю полосы движения при повороте направо или налево. С другой стороны, при езде по прямой, водитель, в общем, обеспечивает движение своего транспортного средства на центральной линии полосы движения. Таким образом, если расстояние D составляет предварительно определенное значение (например, 0,3 м) или менее, модуль 42 прогнозирования маршрутов прогнозирует то, что маршрут, по которому будет двигаться целевое транспортное средство M2, представляет собой прямой маршрут R6. Следует отметить, что в случае, если прямой маршрут R6 исключен из возможных вариантов маршрутов вследствие условий движения или других факторов, модуль 42 прогнозирования маршрутов отменяет прогнозирование.
[0049] В случае если расстояние D превышает предварительно определенное значение, и расстояние D является большим на левой стороне центральной линии при просмотре из рассматриваемого транспортного средства M1, как проиллюстрировано на фиг. 12, другими словами, в случае если расстояние D<0, при условии, что центральная линия CL представляет собой координату Y, модуль 42 прогнозирования маршрутов прогнозирует то, что маршрут, по которому будет двигаться целевое транспортное средство M2, представляет собой маршрут R5 на правый поворот. В случае если расстояние D превышает предварительно определенное значение, и расстояние D является большим на правой стороне центральной линии при просмотре из рассматриваемого транспортного средства M1, другими словами, в случае если расстояние D>0, при условии, что центральная линия CL представляет собой координату Y, модуль 42 прогнозирования маршрутов прогнозирует то, что маршрут, по которому будет двигаться целевое транспортное средство M2, представляет собой маршрут R7 на левый поворот. Таким образом, даже в случае, если маршрут, по которому будет двигаться целевое транспортное средство M2, не может прогнозироваться посредством использования состояния затора в движении и информации пешеходов, использование расстояния D обеспечивает возможность модулю 42 прогнозирования маршрутов прогнозировать маршрут, по которому будет двигаться целевое транспортное средство M2.
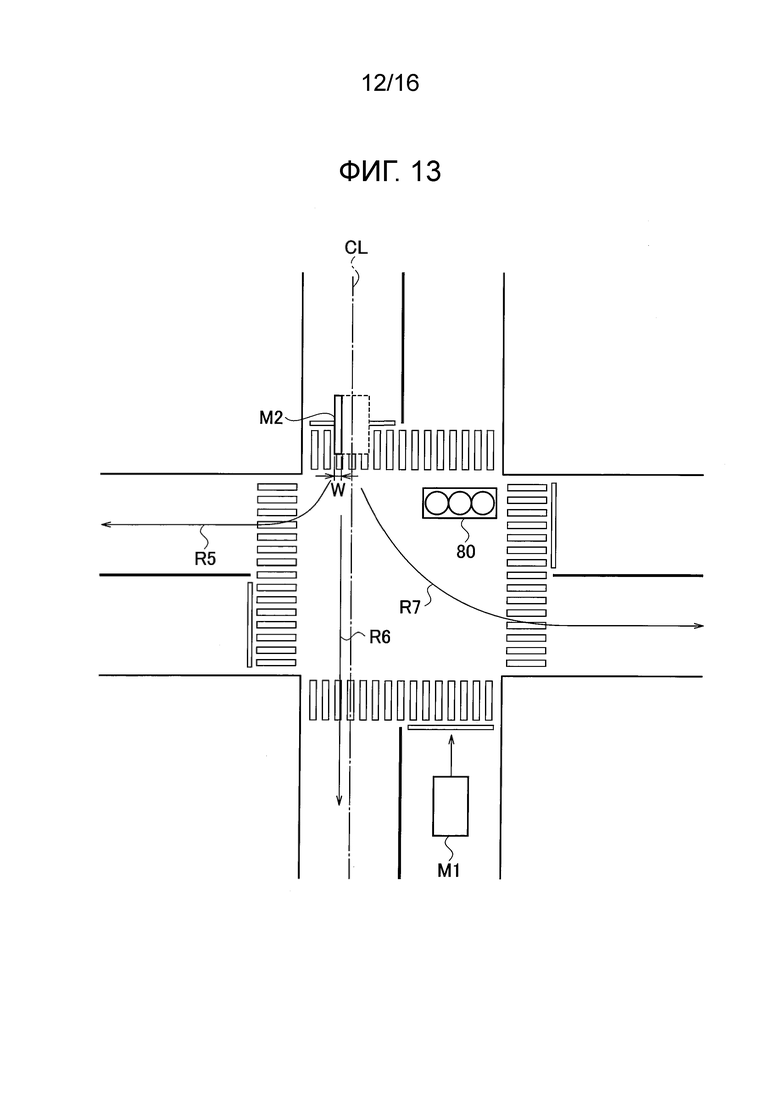
[0050] Между тем, возникают случаи, когда модуль 10 обнаружения объектов не может точно обнаруживать ширину W транспортного средства для целевого транспортного средства M2 по некоторым причинам, к примеру, в силу того, что целевое транспортное средство M2 скрывается посредством другого транспортного средства, как проиллюстрировано на фиг. 13. Если обнаруженная ширина W транспортного средства меньше предварительно определенного значения (например, 80% типа транспортного средства), модуль 42 прогнозирования маршрутов не выполняет сужение возможных вариантов маршрутов с использованием расстояния D. Это обусловлено тем, что в случае, если обнаруженная ширина W транспортного средства меньше предварительно определенного значения, невозможно оценивать то, какая часть всей ширины транспортного средства обнаруживается, и в силу этого возникают случаи, когда позиция целевого транспортного средства M2 относительно центральной линии CL не вычисляется точно.
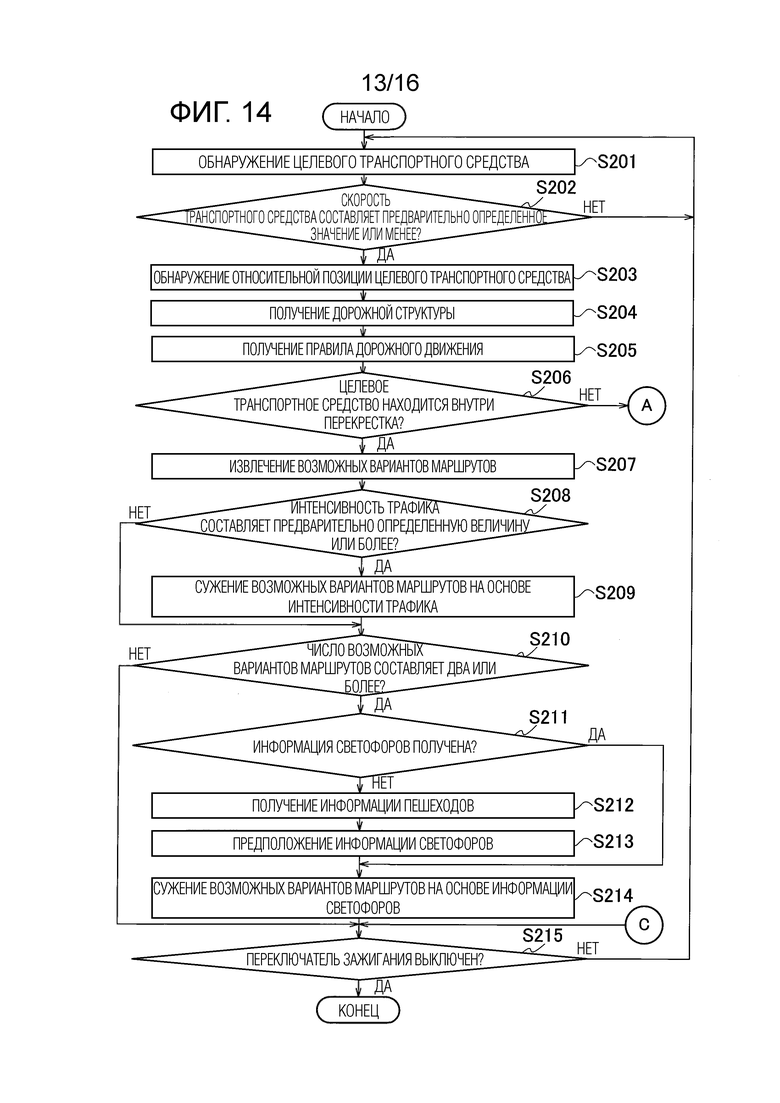
[0051] Далее предоставляется описание со ссылкой на блок-схемы последовательности операций способа, показанные на фиг. 14-16, для примера работы устройства 2 прогнозирования поведения транспортного средства согласно второму варианту осуществления. Следует отметить, что операции на этапах S201-S205 и на этапе S215 являются идентичными операциям на этапах S101-S105 и на этапе S107 на фиг. 3, и в силу этого их подробное описание опускается.
[0052] На этапе S206, модуль 42 прогнозирования маршрутов оценивает то, позиционируется целевое транспортное средство M2 внутри перекрестка или за пределами перекрестка. Это обусловлено тем, что возникают случаи, когда возможные варианты маршрутов, которые должны извлекаться, отличаются между внутри и за пределами перекрестка. Если целевое транспортное средство M2 позиционируется внутри перекрестка ("Да" на этапе S206), процесс переходит к этапу S207. Если целевое транспортное средство M2 позиционируется за пределами перекрестка ("Нет" на этапе S206), процесс переходит к этапу S220.
[0053] На этапе S207, модуль 42 прогнозирования маршрутов извлекает несколько возможных вариантов маршрутов, по которым может двигаться целевое транспортное средство M2, на основе позиции целевого транспортного средства M2 и дорожной структуры. Извлечение на основе дорожной структуры означает извлечение маршрутов, по которым может двигаться целевое транспортное средство M2, из позиции целевого транспортного средства M2 на основе дорожной структуры.
[0054] На этапе S208, модуль 42 прогнозирования маршрутов оценивает то, составляет либо нет интенсивность трафика в возможном варианте маршрута предварительно определенную величину или более, с использованием информации относительно транспортных средств M3 и M4 около рассматриваемого транспортного средства M1. Информация относительно транспортных средств M3 и M4 включает в себя их позиции, скорости, ускорения и направления движения. В общем, необычно то, что транспортное средство остается в позиции на дороге, в которой интенсивность трафика составляет определенную величину или более. Если это происходит, транспортное средство затрудняет поток трафика, что не является предпочтительным с точки зрения правил дорожного движения. Таким образом, модуль 42 прогнозирования маршрутов может использовать интенсивность трафика и правила дорожного движения в возможном варианте маршрута, чтобы сужать возможные варианты маршрутов. Если интенсивность трафика в возможном варианте маршрута составляет предварительно определенную величину или более ("Да" на этапе S208), процесс переходит к этапу S209. Если интенсивность трафика меньше предварительно определенной величины ("Нет" на этапе S208), процесс переходит к этапу S210.
[0055] На этапе S209, модуль 42 прогнозирования маршрутов сужает возможные варианты маршрутов с использованием правил дорожного движения и интенсивности трафика на возможных вариантах маршрутов. В случае если интенсивность по прямом маршруте R3 составляет предварительно определенную величину или более, как проиллюстрировано на фиг. 6, модуль 42 прогнозирования маршрутов исключает прямой маршрут R3 из возможных вариантов.
[0056] На этапе S210, модуль 42 прогнозирования маршрутов оценивает то, равно либо нет число возможных вариантов маршрутов двум или более. Если число возможных вариантов маршрутов равно одному ("Нет" на этапе S210), модуль 42 прогнозирования маршрутов прогнозирует то, что оставшийся возможный вариант маршрута представляет собой маршрут, по которому будет двигаться целевое транспортное средство M2, и процесс переходит к этапу S215. Если число возможных вариантов маршрутов равно двум или более ("Да" на этапе S210), процесс переходит к этапу S211.
[0057] На этапе S211, модуль 42 прогнозирования маршрутов получает информацию светофоров около рассматриваемого транспортного средства M1, чтобы сужать возможные варианты маршрутов. Если модуль 42 прогнозирования маршрутов получает информацию светофоров ("Да" на этапе S211), процесс переходит к этапу S214. Если модуль 42 прогнозирования маршрутов не получает информацию светофоров ("Нет" на этапе S211), процесс переходит к этапу S212.
[0058] На этапе S212, модуль 42 прогнозирования маршрутов получает информацию пешеходов относительно пешеходных переходов. Это обусловлено тем, что даже в случае, если информация светофоров не может получаться, использование информации пешеходов обеспечивает возможность модулю 42 прогнозирования маршрутов предполагать информацию светофоров.
[0059] На этапе S213, модуль 42 прогнозирования маршрутов предполагает информацию светофоров с использованием полученной информации пешеходов. Как проиллюстрировано на фиг. 7, в случае если пешеходы идут по пешеходному переходу 90, расположенному на прямом маршруте R2, и пешеходы стоят перед пешеходным переходом 91, расположенным на маршруте направления движения рассматриваемого транспортного средства M1, модуль 42 прогнозирования маршрутов из перемещения пешеходов предполагает то, что сигнал 80 светофора для направления движения рассматриваемого транспортного средства M1 является зеленым, и то, что сигнал 81 светофора для направления, пересекающего направление движения рассматриваемого транспортного средства M1, является красным.
[0060] На этапе S214, модуль 42 прогнозирования маршрутов сужает возможные варианты маршрутов с использованием информации светофоров, полученной на этапе S211, или информации светофоров, предполагаемой на этапе S213. Следует отметить, что модуль 42 прогнозирования маршрутов может сужать возможные варианты маршрутов с использованием как информации светофоров, полученной на этапе S211, так и информации светофоров, предполагаемой на этапе S213.
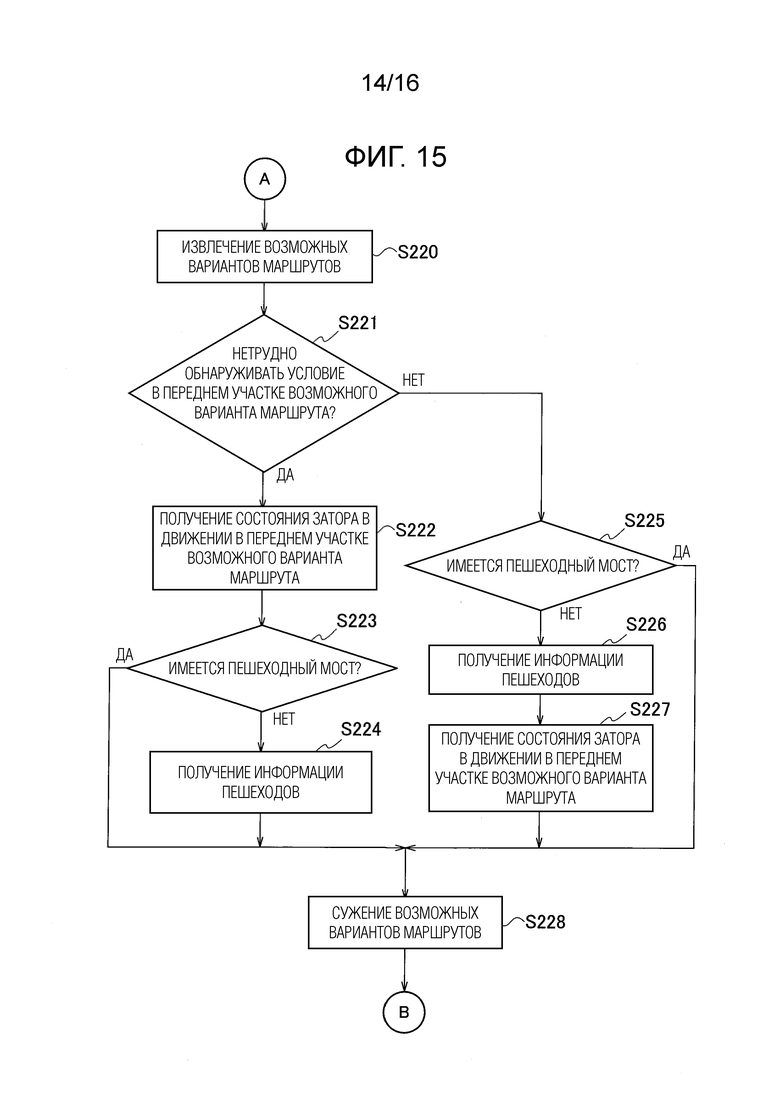
[0061] Затем, на этапе S220, показанном на фиг. 15, модуль 42 прогнозирования маршрутов извлекает несколько возможных вариантов маршрутов, по которым может двигаться целевое транспортное средство M2, на основе позиции целевого транспортного средства M2 и дорожной структуры.
[0062] На этапе S221, модуль 10 обнаружения объектов обнаруживает условие в переднем участке возможного варианта маршрута, извлеченного из модуля 42 прогнозирования маршрутов. Передний участок возможного варианта маршрута означает участок перед возможным вариантом маршрута. Модуль 10 обнаружения объектов обнаруживает условие в переднем участке возможного варианта маршрута в пределах обнаруживаемого диапазона, который затрагивается посредством других транспортных средств и зданий около рассматриваемого транспортного средства M1. В частности, чем больше других транспортных средств и зданий, тем сложнее модулю 10 обнаружения объектов обнаруживать условие в переднем участке возможного варианта маршрута, тогда как чем меньше других транспортных средств и зданий, тем проще модулю 10 обнаружения объектов обнаруживать условие в переднем участке возможного варианта маршрута. Если модулю 10 обнаружения объектов нетрудно обнаруживать условие в переднем участке возможного варианта маршрута ("Да" на этапе S221), процесс переходит к этапу S222. Если модулю 10 обнаружения объектов затруднительно обнаруживать условие в переднем участке возможного варианта маршрута ("Нет" на этапе S221), процесс переходит к этапу S225.
[0063] На этапе S222, модуль 42 прогнозирования маршрутов получает состояние затора в движении в переднем участке возможного варианта маршрута на основе информации относительно переднего участка возможного варианта маршрута, обнаруженной посредством модуля 10 обнаружения объектов. Это обусловлено тем, что возникают случаи, когда возможные варианты маршрутов могут сужаться на основе состояния затора в движении.
[0064] На этапе S223, модуль 42 прогнозирования маршрутов обращается к картографической базе 30 данных, чтобы обнаруживать то, имеется или нет пешеходный мост около рассматриваемого транспортного средства M1. Причина, по которой обнаруживается то, имеется или нет пешеходный мост, заключается в том, что из информации нетрудно оценивать то, может или нет использоваться информация пешеходов относительно пешеходных переходов около рассматриваемого транспортного средства M1. В частности, если имеется пешеходный мост около рассматриваемого транспортного средства M1, модуль 42 прогнозирования маршрутов может легко оценивать то, что отсутствует пешеходный переход для перекрестка. Поскольку информация пешеходов для перекрестка без пешеходного перехода не способствует сужению возможных вариантов маршрутов, модуль 42 прогнозирования маршрутов не должен обязательно получать информацию пешеходов. В случае если модуль 42 прогнозирования маршрутов не получает информацию пешеходов, объем информации, которая должна обрабатываться, уменьшается, и это экономит ресурсы. Если имеется пешеходный мост около рассматриваемого транспортного средства M1 ("Да" на этапе S223), процесс переходит к этапу S228. Если отсутствует пешеходный мост около рассматриваемого транспортного средства M1 ("Нет" на этапе S223), процесс переходит к этапу S224.
[0065] На этапе S224, модуль 42 прогнозирования маршрутов получает информацию пешеходов относительно пешеходных переходов. Это обусловлено тем, что возникают случаи, когда использование информации пешеходов позволяет сужать возможные варианты маршрутов.
[0066] На этапе S225, поскольку модулю 10 обнаружения объектов затруднительно обнаруживать условие в переднем участке возможного варианта маршрута, модуль 42 прогнозирования маршрутов получает информацию из информации, которую проще получать. Таким образом, модуль 42 прогнозирования маршрутов обращается к картографической базе 30 данных, чтобы обнаруживать то, имеется или нет пешеходный мост около рассматриваемого транспортного средства M1. Причина, по которой то, имеется или нет пешеходный мост, обнаруживается, является такой, как описано выше. Если имеется пешеходный мост около рассматриваемого транспортного средства M1 ("Да" на этапе S225), процесс переходит к этапу S228. Если отсутствует пешеходный мост около рассматриваемого транспортного средства M1 ("Нет" на этапе S225), процесс переходит к этапу S226.
[0067] На этапе S226, модуль 42 прогнозирования маршрутов получает информацию пешеходов относительно пешеходных переходов. Это обусловлено тем, что возникают случаи, когда использование информации пешеходов позволяет сужать возможные варианты маршрутов.
[0068] На этапе S227, модуль 10 обнаружения объектов обнаруживает условие в переднем участке возможного варианта маршрута в пределах обнаруживаемого диапазона. Модуль 42 прогнозирования маршрутов получает состояние затора в движении в переднем участке возможного варианта маршрута на основе информации, обнаруженной посредством модуля 10 обнаружения объектов. Это обусловлено тем, что возникают случаи, когда возможные варианты маршрутов могут сужаться на основе состояния затора в движении.
[0069] На этапе S228, модуль 42 прогнозирования маршрутов сужает возможные варианты маршрутов с использованием состояния затора в движении в переднем участке возможного варианта маршрута и информации пешеходов относительно пешеходных переходов. Следует отметить, что модуль 42 прогнозирования маршрутов может сужать возможные варианты маршрутов с использованием как состояния затора в движении, так и информации пешеходов, либо может сужать возможные варианты маршрутов с использованием только одного из состояния затора в движении или информации пешеходов.
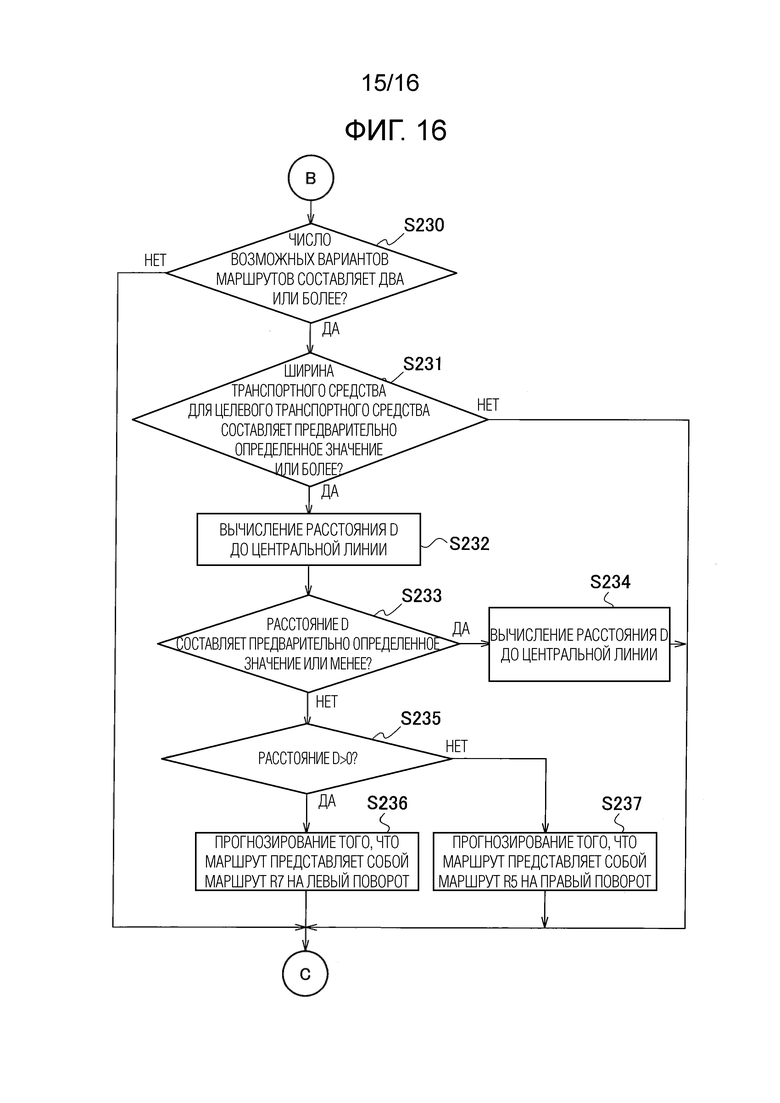
[0070] Затем, на этапе S230, показанном на фиг. 16, модуль 42 прогнозирования маршрутов оценивает то, равно либо нет число возможных вариантов маршрутов двум или более. Если число возможных вариантов маршрутов равно одному ("Нет" на этапе S230), модуль 42 прогнозирования маршрутов прогнозирует то, что оставшийся возможный вариант маршрута представляет собой маршрут, по которому будет двигаться целевое транспортное средство M2, и процесс переходит к этапу S215. Если число возможных вариантов маршрутов равно двум или более ("Да" на этапе S230), процесс переходит к этапу S231.
[0071] На этапе S231, модуль 10 обнаружения объектов обнаруживает ширину W транспортного средства для целевого транспортного средства M2 для того, чтобы вычислять расстояние D от центральной линии CL полосы движения, в которой позиционируется целевое транспортное средство M2, до центральной позиции целевого транспортного средства M2. Если обнаруженная ширина W транспортного средства меньше предварительно определенного значения, модуль 42 прогнозирования маршрутов не выполняет сужение возможных вариантов маршрутов с использованием расстояния D. Это обусловлено тем, что в случае, если обнаруженная ширина W транспортного средства меньше предварительно определенного значения, возникают случаи, когда невозможно оценивать то, какая часть всей ширины транспортного средства обнаруживается, и в силу этого позиция целевого транспортного средства M2 относительно центральной линии CL не может точно вычисляться. Если обнаруженная ширина W транспортного средства составляет предварительно определенное значение или более ("Да" на этапе S231), процесс переходит к этапу S232. Если обнаруженная ширина W транспортного средства меньше предварительно определенного значения ("Нет" на этапе S231), процесс переходит к этапу S215.
[0072] На этапе S232, модуль 42 прогнозирования маршрутов вычисляет расстояние D от центральной линии CL полосы движения до центральной позиции целевого транспортного средства M2 с использованием ширины W транспортного средства для целевого транспортного средства M2, обнаруженной посредством модуля 10 обнаружения объектов. Это обусловлено тем, что даже в случае, если маршрут, по которому будет двигаться целевое транспортное средство M2, не может прогнозироваться посредством использования состояния затора в движении и информации пешеходов, возникают случаи, когда использование расстояния D обеспечивает возможность модулю 42 прогнозирования маршрутов прогнозировать маршрут, по которому будет двигаться целевое транспортное средство M2.
[0073] На этапе S233, модуль 42 прогнозирования маршрутов оценивает то, составляет либо нет вычисленное расстояние D предварительно определенное значение или менее. Это обеспечивает возможность модулю 42 прогнозирования маршрутов сужать возможные варианты маршрутов. В случае если расстояние D составляет предварительно определенное значение или менее ("Да" на этапе S233), процесс переходит к этапу S234. Если расстояние D превышает предварительно определенное значение ("Нет" на этапе S233), процесс переходит к этапу S235.
[0074] На этапе S234, модуль 42 прогнозирования маршрутов прогнозирует то, что маршрут, по которому будет двигаться целевое транспортное средство M2, представляет собой прямой маршрут R6, как проиллюстрировано на фиг. 8. Следует отметить, что модуль 42 прогнозирования маршрутов отменяет прогнозирование в случае, если прямой маршрут R6 исключен из возможных вариантов маршрутов вследствие условий движения или других причин.
[0075] На этапе S235, модуль 42 прогнозирования маршрутов оценивает то, является либо нет расстояние D большим на левой стороне или на правой стороне при просмотре из рассматриваемого транспортного средства M1. В частности, модуль 42 прогнозирования маршрутов оценивает то, составляет расстояние D<0 или расстояние D>0, при условии, что центральная линия CL представляет собой координату Y. Если расстояние D является большим на правой стороне при просмотре из рассматриваемого транспортного средства M1, другими словами, если расстояние D>0 ("Да" на этапе S235), процесс переходит к этапу S236. Если расстояние D является большим на левой стороне при просмотре из рассматриваемого транспортного средства M1, другими словами, если расстояние D<0 ("Нет" на этапе S235), процесс переходит к этапу S237.
[0076] На этапе S236, модуль 42 прогнозирования маршрутов прогнозирует то, что маршрут, по которому будет двигаться целевое транспортное средство M2, представляет собой маршрут R7 на левый поворот. На этапе S237, модуль 42 прогнозирования маршрутов прогнозирует то, что маршрут, по которому будет двигаться целевое транспортное средство M2, представляет собой маршрут R5 на правый поворот.
[0077] Как описано выше, устройство 2 прогнозирования поведения транспортного средства согласно второму варианту осуществления предоставляет следующее функциональное преимущество.
[0078] Устройство 2 прогнозирования поведения транспортного средства извлекает несколько возможных вариантов маршрута, по которым может двигаться целевое транспортное средство M2, на основе позиции целевого транспортного средства M2 и дорожной структуры. Устройство 2 прогнозирования поведения транспортного средства сужает извлеченные возможные варианты маршрутов с использованием правил дорожного движения. Это повышает точность устройства 2 прогнозирования поведения транспортного средства при прогнозировании маршрута, по которому будет двигаться целевое транспортное средство M2, даже когда затруднительно обнаруживать ориентацию и предыстории движения целевого транспортного средства M2.
[0079] Правила дорожного движения включают в себя правила относительно, по меньшей мере, одного из сигнала светофора, пешеходного перехода или дорожного знака. Устройство 2 прогнозирования поведения транспортного средства сужает возможные варианты маршрутов с использованием правил дорожного движения относительно цветов сигнала светофора. В случае если информация светофоров не может получаться, устройство 2 прогнозирования поведения транспортного средства предполагает информацию светофоров с использованием информации пешеходов относительно пешеходных переходов с тем, чтобы сужать возможные варианты маршрутов. Использование правил относительно сигнала светофора, пешеходного перехода или дорожного знака, чтобы сужать возможные варианты маршрутов, как описано выше, обеспечивает возможность устройству 2 прогнозирования поведения транспортного средства предоставлять повышенную точность при прогнозировании маршрута, по которому будет двигаться целевое транспортное средство M2, даже когда затруднительно обнаруживать ориентацию и предыстории движения целевого транспортного средства M2.
[0080] Устройство 2 прогнозирования поведения транспортного средства обнаруживает позиции других транспортных средств M3 и M4 на возможных вариантах маршрутов, отличных от целевого транспортного средства M2, чтобы оценивать то, имеется или нет затор в движении в переднем участке возможного варианта маршрута. Затем устройство 2 прогнозирования поведения транспортного средства сужает возможные варианты маршрутов на основе правил дорожного движения и состояния затора в движении. Это обеспечивает возможность устройству 2 прогнозирования поведения транспортного средства предоставлять повышенную точность при прогнозировании маршрута, по которому будет двигаться целевое транспортное средство M2, даже в случае, если ориентация и предыстории движения целевого транспортного средства M2 не могут обнаруживаться.
[0081] Хотя выше описываются варианты осуществления настоящего изобретения, не следует понимать, что описания и чертежи, которые составляют часть этого раскрытия сущности, ограничивают изобретение. Из этого раскрытия сущности, различные альтернативные варианты осуществления, примеры и технологии работы должны становиться очевидными для специалистов в данной области техники.
[0082] Например, хотя во втором варианте осуществления, модуль 50 связи используется для того, чтобы получать информацию светофоров, способ получения информации светофоров не ограничен этим. Например, камера может использоваться для того, чтобы получать информацию светофоров.
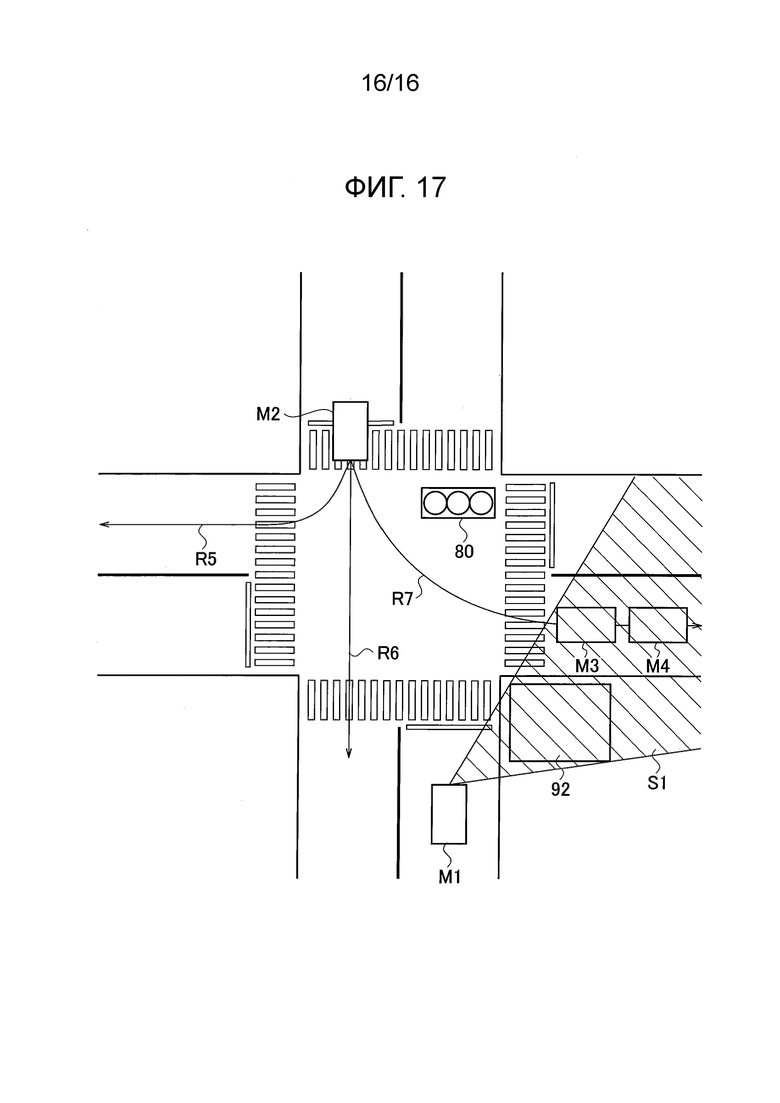
[0083] Хотя также во втором варианте осуществления, модуль 42 прогнозирования маршрутов использует позиционную информацию относительно транспортных средств M3 и M4, чтобы оценивать то, имеется или нет затор в движении в переднем участке возможного варианта маршрута, возникают случаи, когда модуль 10 обнаружения объектов не может обнаруживать информацию относительно S1 области, которая скрывается посредством здания 92, как проиллюстрировано на фиг. 17. Как проиллюстрировано на фиг. 17, даже если предусмотрены транспортные средства M3 и M4 в переднем участке маршрута R7 на левый поворот, модуль 10 обнаружения объектов не может обнаруживать транспортные средства M3 и M4, так что модуль 42 прогнозирования маршрутов не может оценивать то, имеется или нет затор в движении в переднем участке маршрута R7 на левый поворот. В случае если модуль 10 обнаружения объектов не может обнаруживать условие в переднем участке возможного варианта маршрута, как описано выше, модуль 42 прогнозирования маршрутов отменяет прогнозирование маршрута, по которому будет двигаться целевое транспортное средство M2, чтобы не допускать осуществления неправильного прогнозирования.
[0084] Хотя описание предоставлено в первом и втором вариантах осуществления для дорог с правосторонним движением, настоящее изобретение является применимым к дорогам с левосторонним движением. Помимо этого, настоящее изобретение является применимым к транспортным средствам с функцией автоматизированного вождения.
[0085] Следует отметить, что функции в вышеописанных вариантах осуществления могут реализовываться посредством одной или более схем обработки. Схемы обработки включают в себя программируемые обрабатывающие устройства, такие как обрабатывающие устройства с электрическими схемами. Схемы обработки включают в себя такие устройства, как специализированные интегральные схемы (ASIC), которые выполнены с возможностью выполнять функции, описанные в вариантах осуществления, и традиционные схемные части.
Список номеров ссылок
[0086] 1, 2 - устройство прогнозирования поведения транспортного средства
10 - модуль обнаружения объектов
20 - приемное GPS-устройство
30 - картографическая база данных
40 - контроллер
41 - модуль обнаружения информации
42 - модуль прогнозирования маршрутов
50 - модуль связи
Изобретение относится к способу и устройству прогнозирования поведения транспортного средства. Способ прогнозирования поведения транспортного средства для прогнозирования маршрута, по которому будет двигаться целевое транспортное средство около рассматриваемого транспортного средства, с использованием датчика для того, чтобы обнаруживать позицию целевого транспортного средства. Способ содержит этапы, на которых получают дорожную структуру около позиции целевого транспортного средства, включающую в себя по меньшей мере полосу движения, получают правило дорожного движения для дорожной структуры, определяют то, стоит или нет целевое транспортное средство на месте, извлекают несколько возможных вариантов маршрутов для направления, в котором будет двигаться целевое транспортное средство, на основе дорожной структуры и в случае, если целевое транспортное средство стоит на месте, прогнозируют маршрут, по которому будет двигаться целевое транспортное средство, из нескольких возможных вариантов маршрутов на основе правила дорожного движения. Достигается повышение безопасности управления транспортным средством. 3 н. и 5 з.п. ф-лы, 17 ил.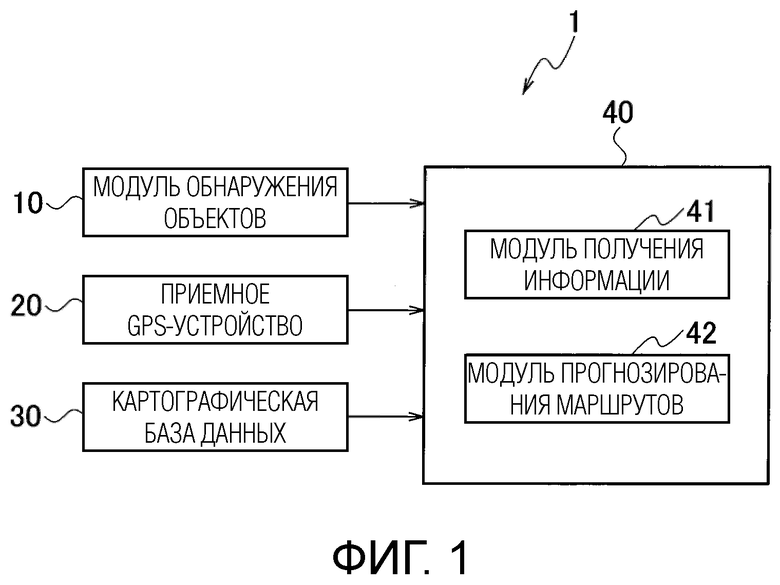
1. Способ прогнозирования поведения транспортного средства для прогнозирования маршрута, по которому будет двигаться целевое транспортное средство около рассматриваемого транспортного средства, с использованием датчика для того, чтобы обнаруживать позицию целевого транспортного средства, при этом способ содержит этапы, на которых:
- получают дорожную структуру около позиции целевого транспортного средства, включающую в себя по меньшей мере полосу движения;
- получают правило дорожного движения для дорожной структуры;
- определяют то, стоит или нет целевое транспортное средство на месте;
- извлекают несколько возможных вариантов маршрутов для направления, в котором будет двигаться целевое транспортное средство, на основе дорожной структуры; и
- в случае, если целевое транспортное средство стоит на месте, прогнозируют маршрут, по которому будет двигаться целевое транспортное средство, из нескольких возможных вариантов маршрутов на основе правила дорожного движения.
2. Способ прогнозирования поведения транспортного средства для прогнозирования маршрута, по которому будет двигаться целевое транспортное средство около рассматриваемого транспортного средства, с использованием датчика для того, чтобы обнаруживать позицию целевого транспортного средства, при этом способ содержит этапы, на которых:
- получают дорожную структуру около позиции целевого транспортного средства, включающую в себя по меньшей мере полосу движения;
- получают правило дорожного движения для дорожной структуры; и
- в случае, если затруднительно получать ориентацию целевого транспортного средства, прогнозируют маршрут, по которому будет двигаться целевое транспортное средство, на основе правила дорожного движения.
3. Способ прогнозирования поведения транспортного средства по п. 1 или 2, в котором:
правило дорожного движения включает в себя правило относительно по меньшей мере одного из сигнала светофора, пешеходного перехода и дорожного знака.
4. Способ прогнозирования поведения транспортного средства по п. 1, содержащий этап, на котором:
- обнаруживают на нескольких возможных вариантах маршрутов позицию транспортного средства, отличного от целевого транспортного средства, при этом:
маршрут, по которому будет двигаться целевое транспортное средство, прогнозируется из нескольких возможных вариантов маршрутов на основе позиции транспортного средства, отличного от целевого транспортного средства, и правила дорожного движения.
5. Способ прогнозирования поведения транспортного средства по п. 1 или 4, в котором:
- в случае, если условие в передних участках нескольких возможных вариантов маршрутов не может обнаруживаться, прогнозирование маршрута, по которому будет двигаться целевое транспортное средство, отменяется.
6. Способ прогнозирования поведения транспортного средства по любому из пп. 1, 2 или 4, содержащий этап, на котором:
- определяют скорость транспортного средства для целевого транспортного средства, при этом:
в случае, если скорость транспортного средства для целевого транспортного средства составляет предварительно определенное значение или менее, маршрут, по которому будет двигаться целевое транспортное средство, прогнозируется.
7. Способ прогнозирования поведения транспортного средства по любому из пп. 1, 2 или 4, содержащий этап, на котором:
- обнаруживают путь движения целевого транспортного средства, при этом:
маршрут, по которому будет двигаться целевое транспортное средство, прогнозируется на основе пути движения и правила дорожного движения.
8. Устройство прогнозирования поведения транспортного средства, содержащее:
- датчик, который обнаруживает позицию целевого транспортного средства около рассматриваемого транспортного средства; и
- контроллер, который получает дорожную структуру около позиции целевого транспортного средства, включающую в себя по меньшей мере полосу движения, при этом:
контроллер получает правило дорожного движения для дорожной структуры, определяет то, стоит или нет целевое транспортное средство на месте, и извлекает несколько возможных вариантов маршрутов для направления, в котором будет двигаться целевое транспортное средство, на основе дорожной структуры, и
в случае, если целевое транспортное средство стоит на месте, контроллер прогнозирует маршрут, по которому будет двигаться целевое транспортное средство, из нескольких возможных вариантов маршрутов на основе полученного правила дорожного движения.
| US 9495874 B1, 15.11.2016 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| ПРОГНОЗИРУЮЩИЙ ЧЕЛОВЕКО-МАШИННЫЙ ИНТЕРФЕЙС С ИСПОЛЬЗОВАНИЕМ ТЕХНОЛОГИИ ОБНАРУЖЕНИЯ ВЗГЛЯДА, ИНДИКАТОРОВ "МЕРТВЫХ" ЗОН И ВОДИТЕЛЬСКОГО ОПЫТА | 2010 |
|
RU2514924C2 |

