Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу обнаружения объектов и к устройству обнаружения объектов, которые получают трехмерные данные по области около рассматриваемого транспортного средства посредством использования датчика измерения расстояния и обнаруживают объект посредством использования полученных трехмерных данных.
Уровень техники
[0002] Патентный документ 1 раскрывает устройство обнаружения помех для обнаружения помехи по запланированному пути движения движущегося тела. Устройство обнаружения помех, раскрытое в патентном документе 1, извлекает часть, соответствующую поверхности проезжей дороги, из трехмерного изображения на основе позиционных данных в форме трехмерных координат на проезжей дороге и текущей трехмерной позиции движущегося тела и обнаруживает помеху из извлеченной части, соответствующей поверхности проезжей дороги.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер H 10-141954
Сущность изобретения
Техническая задача
[0004] Тем не менее, вышеупомянутое традиционное устройство обнаружения помех страдает от проблемы: обнаружения только помехи, присутствующей на поверхности запланированного пути движения рассматриваемого транспортного средства; в силу этого неспособности обнаружения объекта, в данный момент не присутствующего на поверхности запланированного пути движения рассматриваемого транспортного средства; и, соответственно, неспособности заблаговременного обнаружения объекта, который с большой вероятностью должен пересекать рассматриваемое транспортное средство в будущем.
[0005] Настоящее изобретение предложено с учетом вышеуказанной ситуации. Задача настоящего изобретения заключается в том, чтобы предоставлять способ обнаружения объектов и устройство обнаружения объектов, допускающие заблаговременное обнаружение объекта, который с большой вероятностью должен пересекать путь рассматриваемого транспортного средства в будущем.
Решение задачи
[0006] Для разрешения вышеупомянутой проблемы, способ обнаружения объектов и устройство обнаружения объектов согласно аспекту настоящего изобретения получают трехмерные данные по области около рассматриваемого транспортного средства посредством использования датчика измерения расстояния. На основе картографических данных по области около текущей позиции рассматриваемого транспортного средства, способ обнаружения объектов и устройство обнаружения объектов оценивают области присутствия пересекающих объектов, в которых в данный момент присутствуют объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем в запланированной области движения, в которой рассматриваемое транспортное средство должно двигаться в будущем. Способ обнаружения объектов и устройство обнаружения объектов обнаруживают объект посредством использования трехмерных данных по внутренним частям областей присутствия пересекающих объектов.
Преимущества изобретения
[0007] Настоящее изобретение позволяет заблаговременно обнаруживать объект, который с большой вероятностью должен пересекать рассматриваемое транспортное средство в будущем.
Краткое описание чертежей
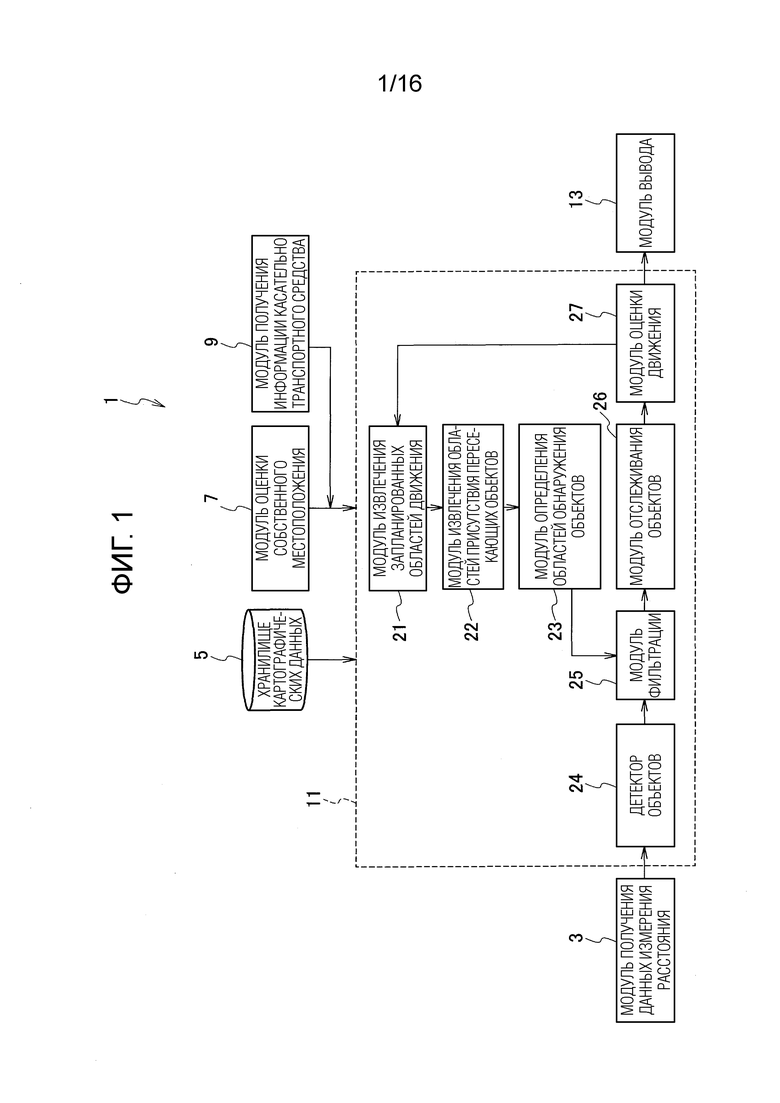
[0008] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства обнаружения объектов согласно первому варианту осуществления настоящего изобретения.
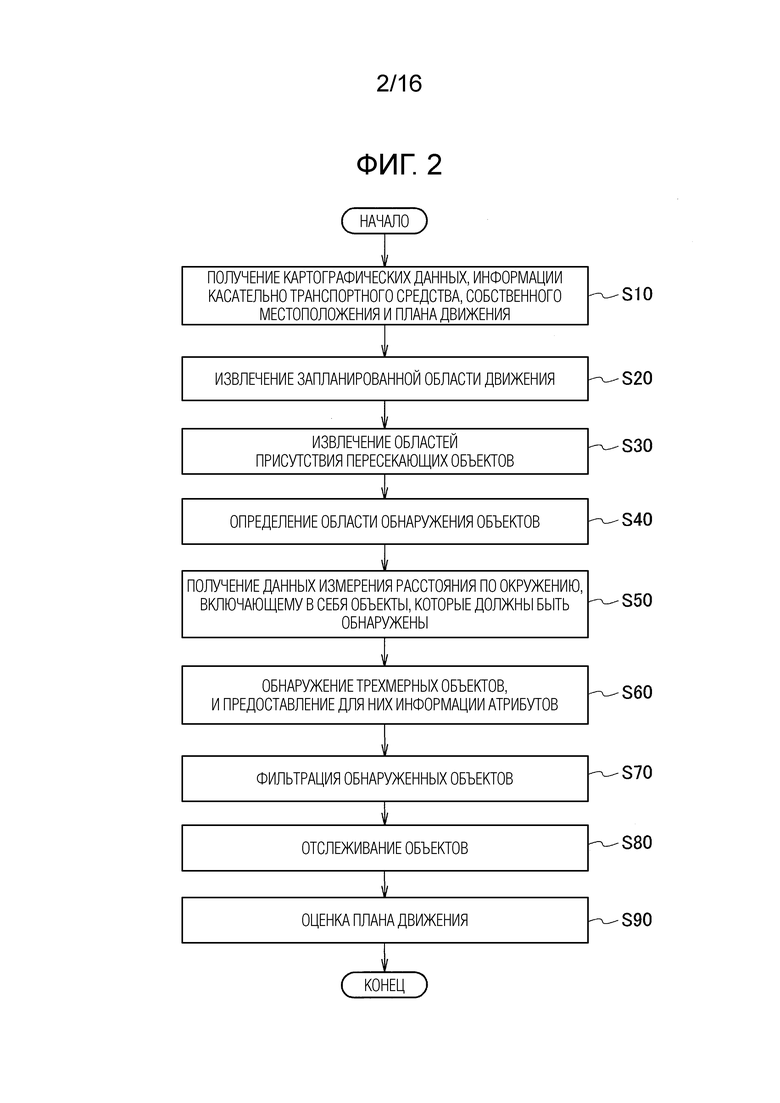
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей процедуру для процесса обнаружения объектов, который должен выполняться посредством устройства обнаружения объектов согласно первому варианту осуществления настоящего изобретения.
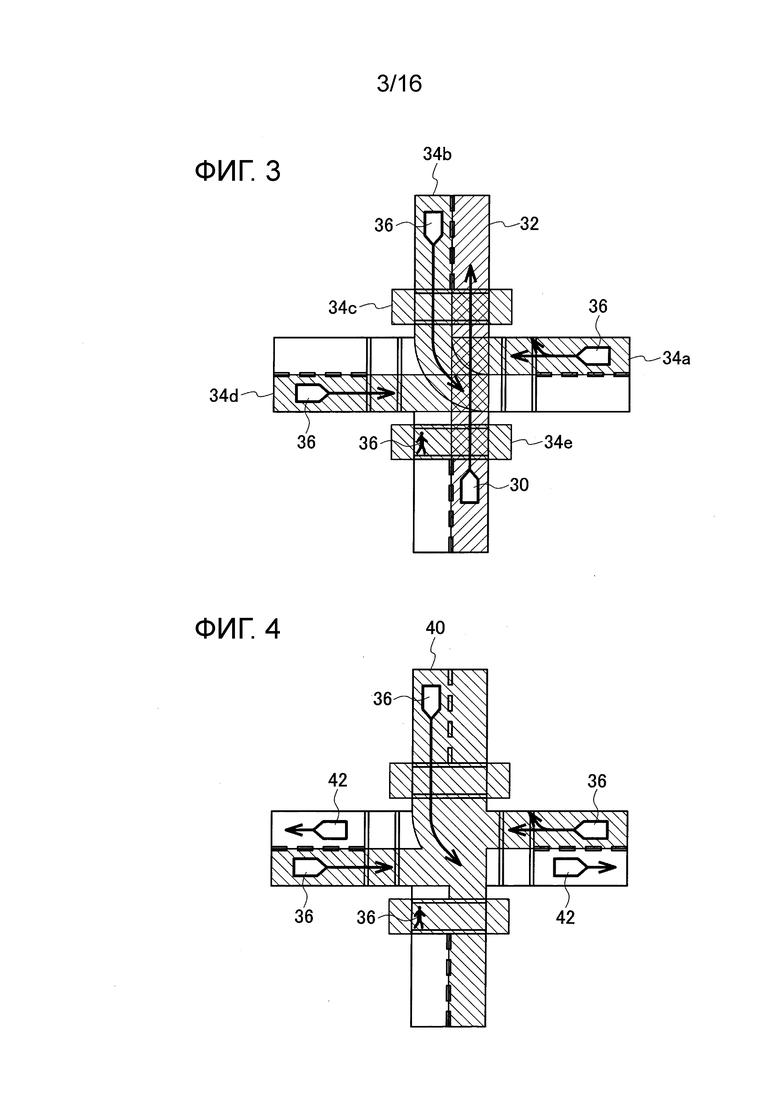
Фиг. 3 является схемой для пояснения того, как оценивать области присутствия пересекающих объектов в способе обнаружения объектов согласно первому варианту осуществления настоящего изобретения.
Фиг. 4 является схемой для пояснения того, как определять область обнаружения объектов в способе обнаружения объектов согласно первому варианту осуществления настоящего изобретения.
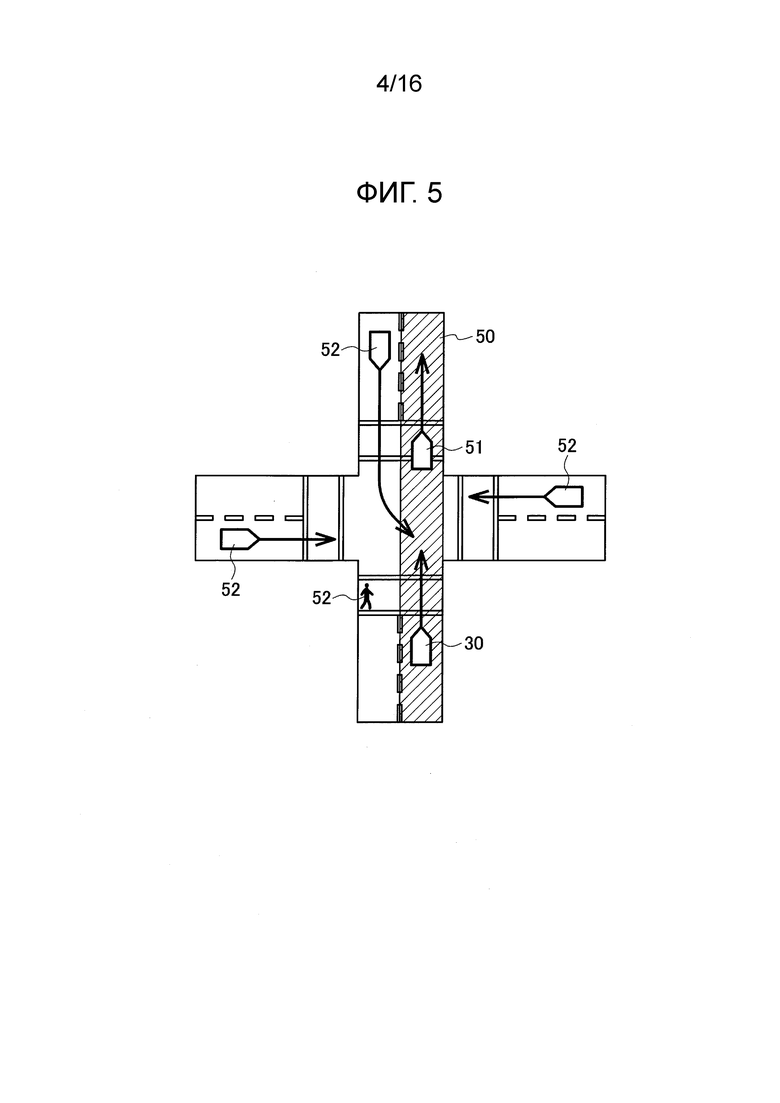
Фиг. 5 является схемой для пояснения преимуществ, которые вводятся посредством способа обнаружения объектов согласно первому варианту осуществления настоящего изобретения.
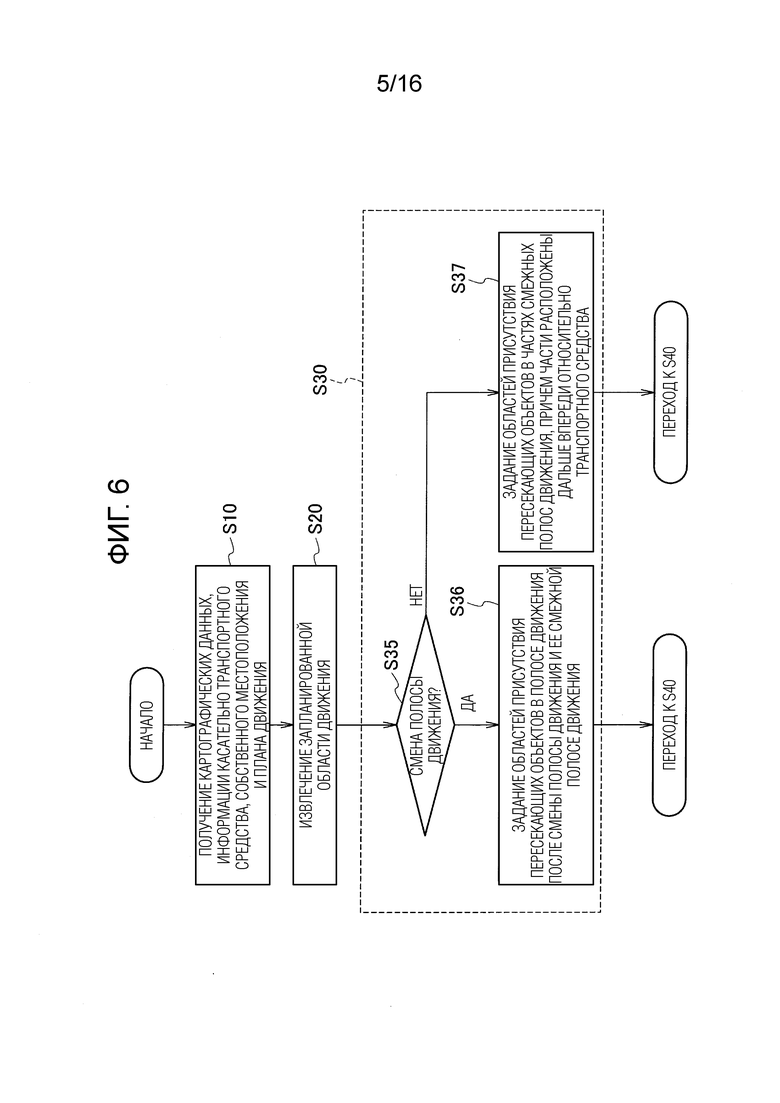
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей процедуру для процесса обнаружения объектов, который должен выполняться посредством устройства обнаружения объектов согласно второму варианту осуществления настоящего изобретения.
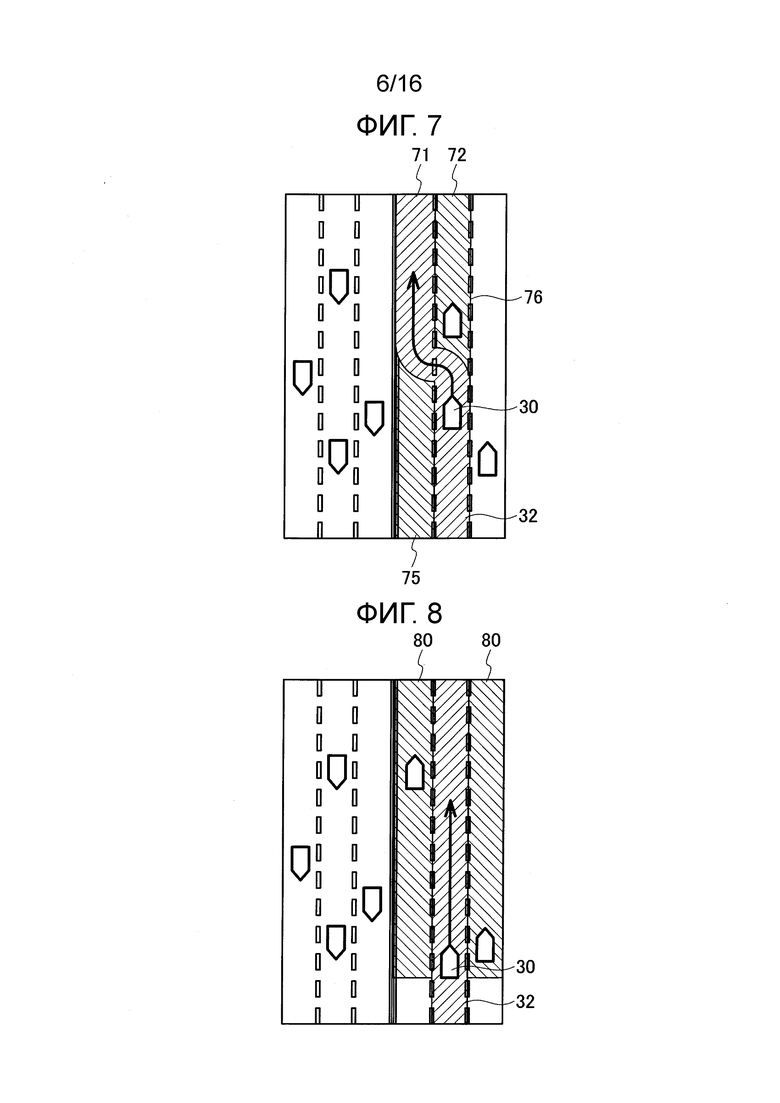
Фиг. 7 является схемой для пояснения того, как оценивать области присутствия пересекающих объектов, когда рассматриваемое транспортное средство сменяет полосу движения на многополосной дороге во втором варианте осуществления настоящего изобретения.
Фиг. 8 является схемой для пояснения того, как оценивать области присутствия пересекающих объектов, когда рассматриваемое транспортное средство должно двигаться по прямой на многополосной дороге во втором варианте осуществления настоящего изобретения.
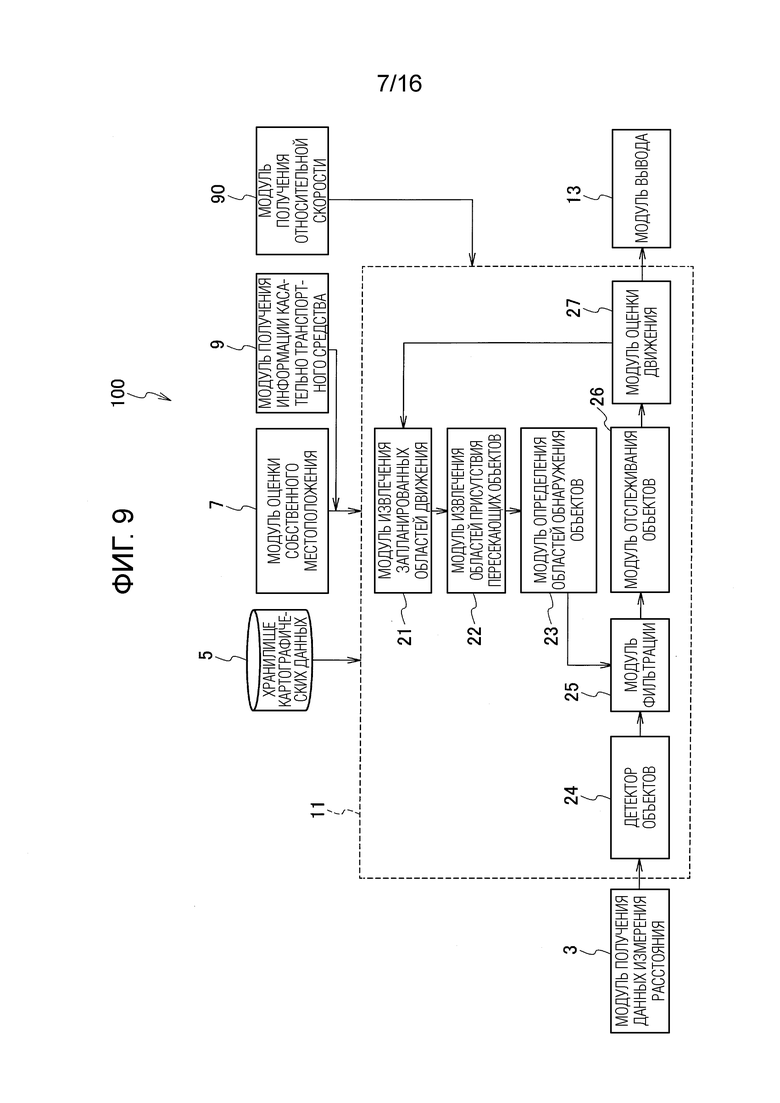
Фиг. 9 является блок-схемой, иллюстрирующей конфигурацию устройства обнаружения объектов согласно третьему варианту осуществления настоящего изобретения.
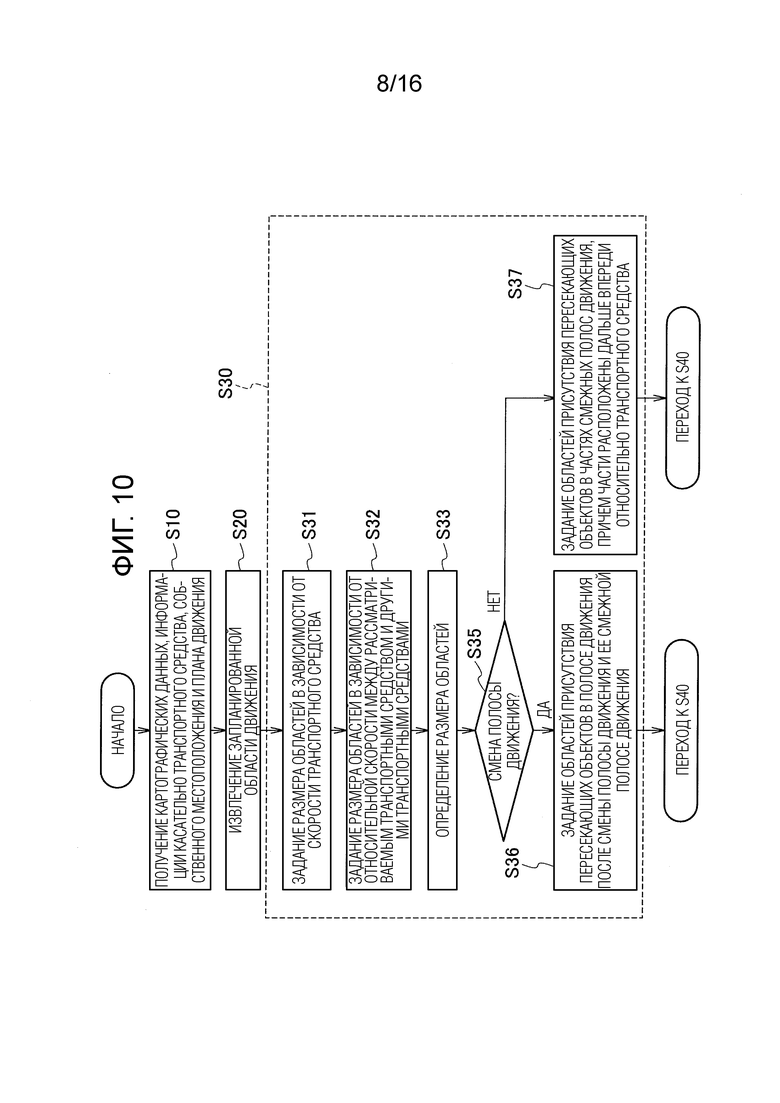
Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей процедуру для процесса обнаружения объектов, который должен выполняться посредством устройства обнаружения объектов согласно третьему варианту осуществления настоящего изобретения.
Фиг. 11 является схемой для пояснения того, как задавать размер областей присутствия пересекающих объектов в способе обнаружения объектов согласно третьему варианту осуществления настоящего изобретения.
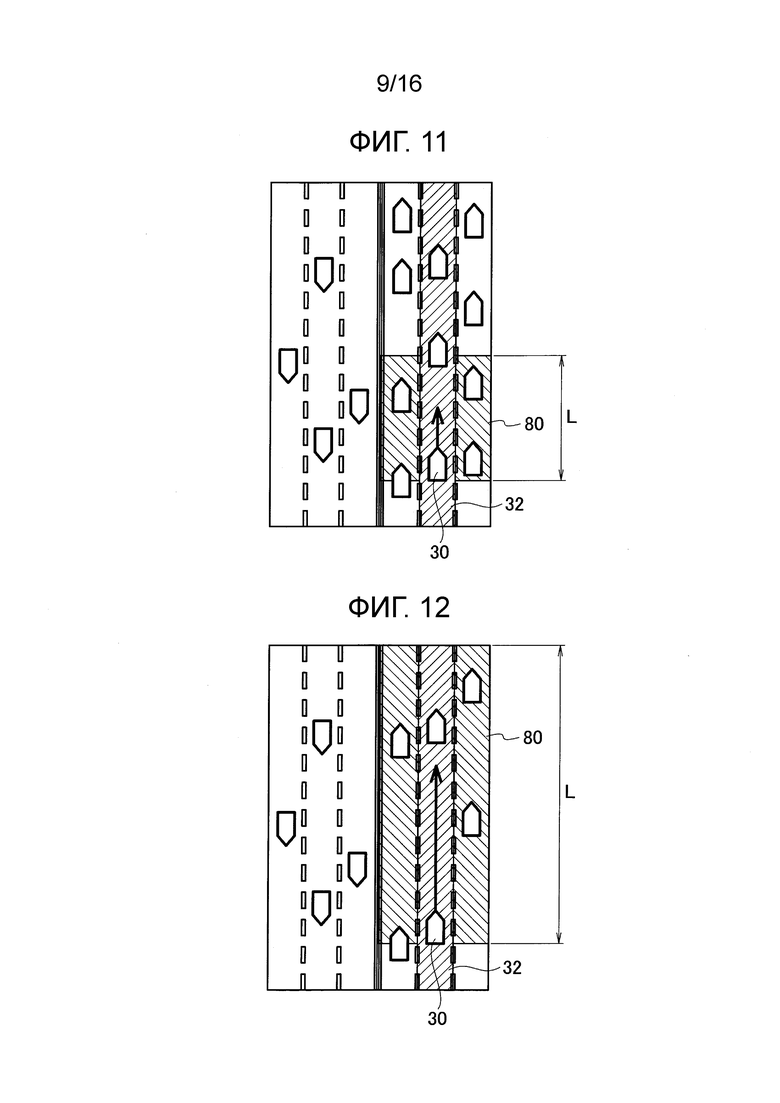
Фиг. 12 является схемой для пояснения того, как задавать размер областей присутствия пересекающих объектов в способе обнаружения объектов согласно третьему варианту осуществления настоящего изобретения.
Фиг. 13 является схемой для пояснения того, как задавать размер областей присутствия пересекающих объектов в способе обнаружения объектов согласно третьему варианту осуществления настоящего изобретения.
Фиг. 14 является блок-схемой последовательности операций способа, иллюстрирующей процедуру для процесса обнаружения объектов, который должен выполняться посредством устройства обнаружения объектов согласно четвертому варианту осуществления настоящего изобретения.
Фиг. 15 является схемой для пояснения того, как задавать запланированную область движения в способе обнаружения объектов согласно четвертому варианту осуществления настоящего изобретения.
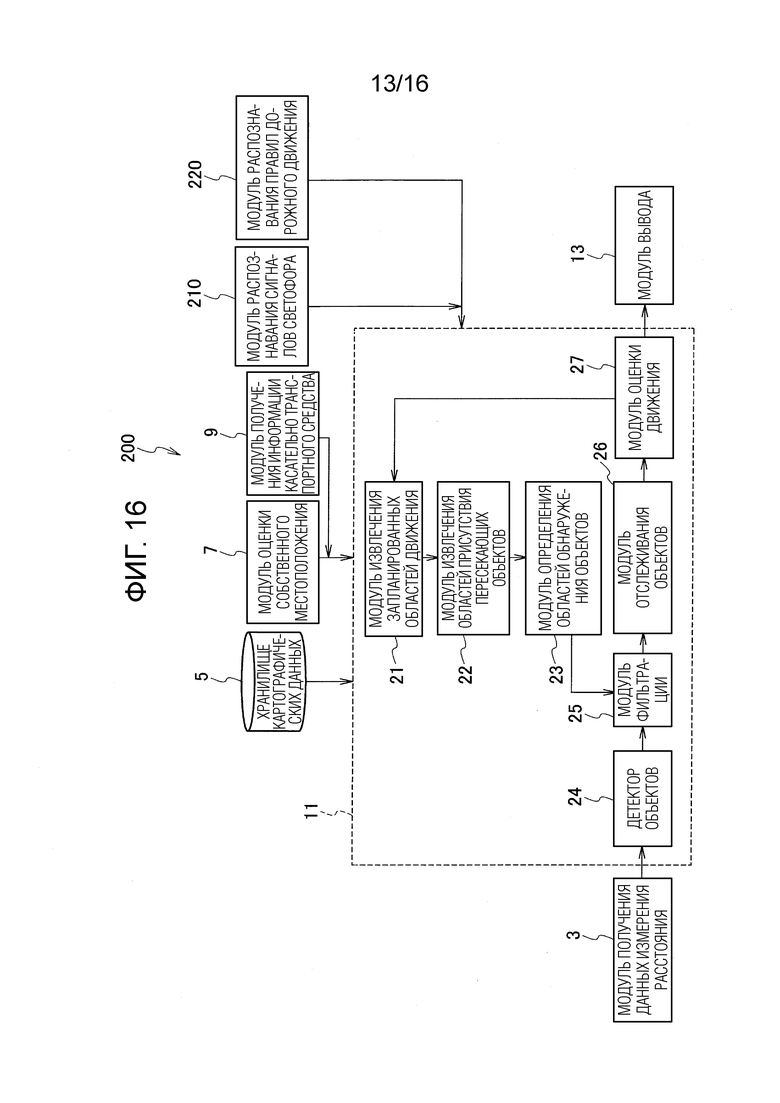
Фиг. 16 является блок-схемой, иллюстрирующей конфигурацию устройства обнаружения объектов согласно пятому варианту осуществления настоящего изобретения.
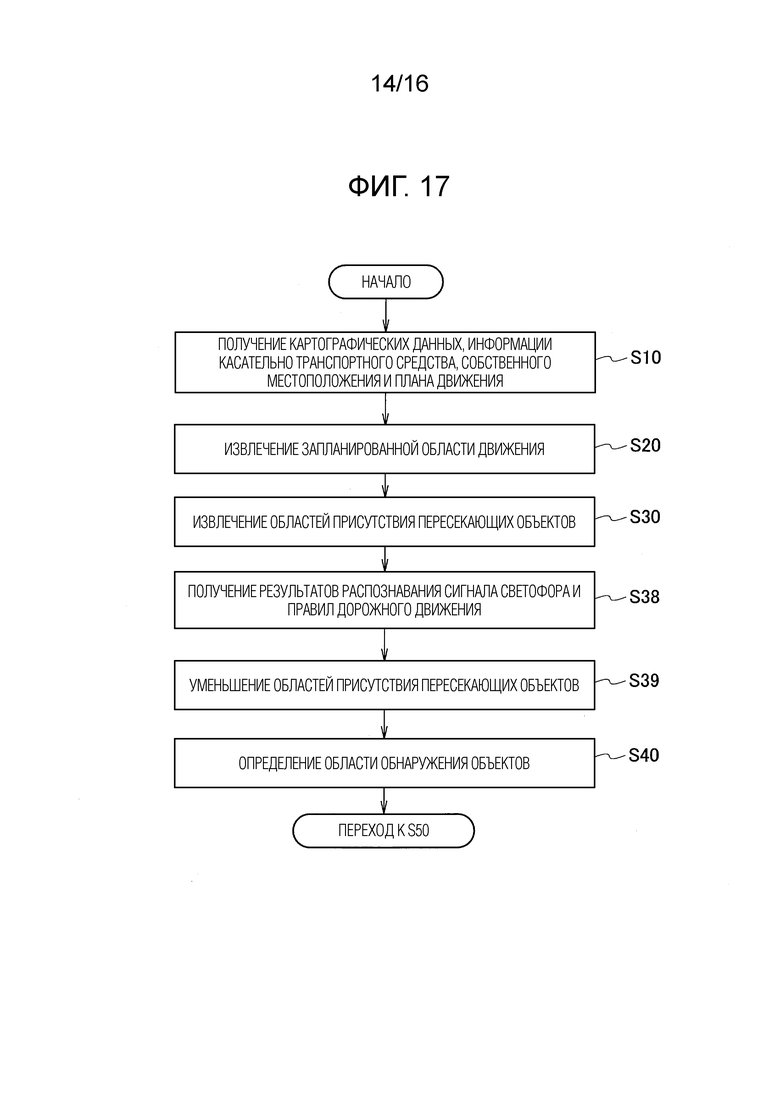
Фиг. 17 является блок-схемой последовательности операций способа, иллюстрирующей процедуру для процесса обнаружения объектов, который должен выполняться посредством устройства обнаружения объектов согласно пятому варианту осуществления настоящего изобретения.
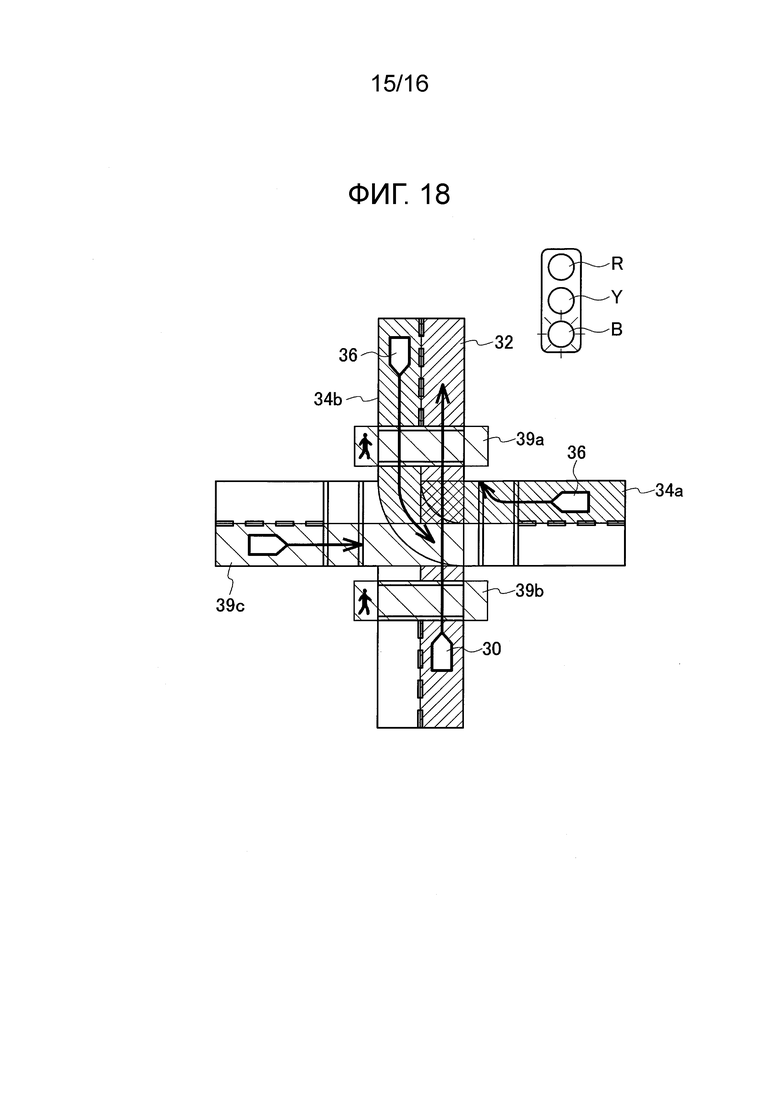
Фиг. 18 является схемой для пояснения того, как сокращать число областей присутствия пересекающих объектов с использованием состояния сигнала светофора в способе обнаружения объектов согласно пятому варианту осуществления настоящего изобретения.
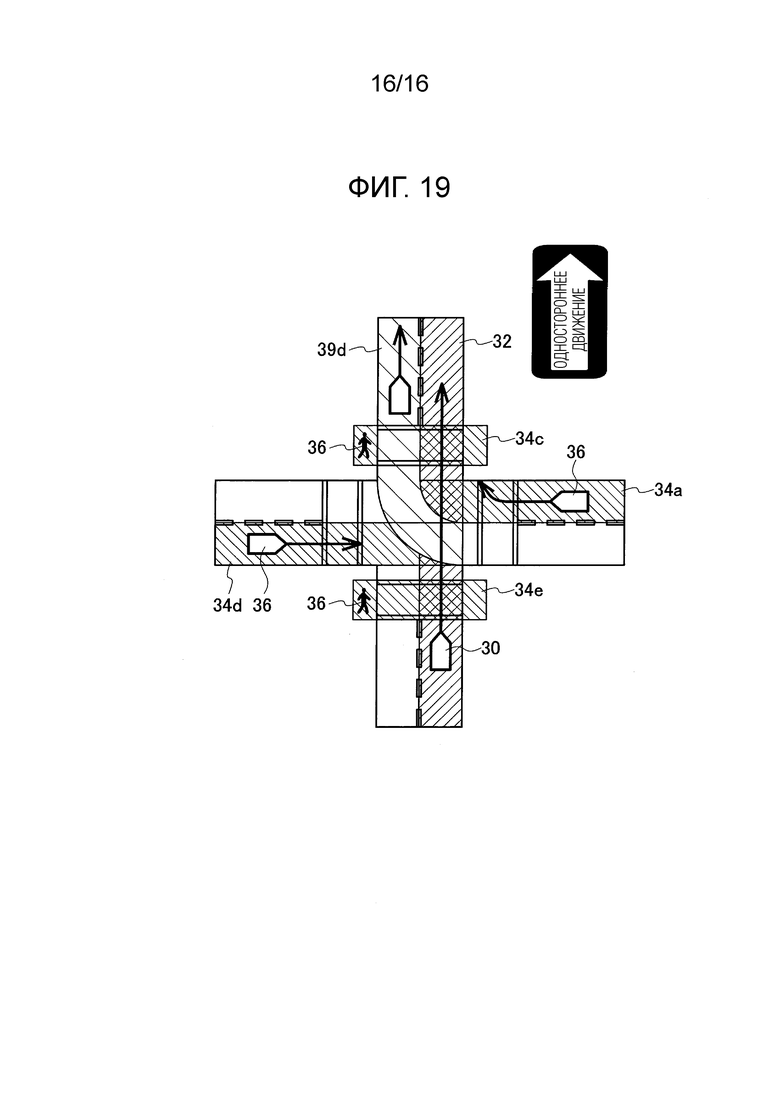
Фиг. 19 является схемой для пояснения того, как сокращать число областей присутствия пересекающих объектов с использованием правил дорожного движения в способе обнаружения объектов согласно пятому варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] Первый вариант осуществления
Со ссылкой на чертежи, приводится описание первого варианта осуществления, к которому применяется настоящее изобретение.
[0010] Конфигурация устройства обнаружения объектов
Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию устройства обнаружения объектов согласно первому варианту осуществления. Как проиллюстрировано на фиг. 1, устройство 1 обнаружения объектов согласно первому варианту осуществления включает в себя модуль 3 получения данных измерения расстояния, хранилище 5 картографических данных, модуль 7 оценки собственного местоположения, модуль 9 получения информации касательно транспортного средства, центральный контроллер 11 и модуль 13 вывода. На основе данных измерения расстояния, полученных посредством модуля 3 получения данных измерения расстояния, устройство 1 обнаружения объектов обнаруживает объекты с использованием центрального контроллера 11, который функционирует в качестве детектора объектов, и выводит результат обнаружения из модуля 13 вывода. В этом процессе, центральный контроллер 11 оценивает область, в которой присутствуют объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство, посредством использования информации касательно транспортного средства, полученной посредством модуля 9 получения информации касательно транспортного средства, информации собственного местоположения, оцененной посредством модуля 7 оценки собственного местоположения, картографических данных, сохраненных в хранилище 5 картографических данных, и т.п., а также за счет этого обнаруживает объекты.
[0011] Модуль 3 получения данных измерения расстояния представляет собой датчик измерения расстояния, установленный в рассматриваемом транспортном средстве, для определения расстояний между рассматриваемым транспортным средством и точками измерения расстояния около рассматриваемого транспортного средства. Модуль 3 получения данных измерения расстояния получает трехмерные данные измерения расстояния (также называемые "данными расстояния") по окружению около рассматриваемого транспортного средства (включающему в себя не только трехмерные объекты, но также и поверхности дороги). Эти трехмерные данные измерения расстояния включают в себя информацию относительно таких параметров, как трехмерная позиция и расстояние каждой точки измерения расстояния. Лазерный радар, включающий нескольких линий сканирования лазерного луча и допускающий обнаружение данных расстояния высокого разрешения, используется в качестве датчика измерения расстояния. Относительно способа получения данных расстояния, конкретное ограничение не должно налагаться на измерительное устройство, характеристики измерения или формат вывода данных. Например, стереокамера может использоваться в качестве измерительного устройства. В противном случае, может использоваться активный стереоспособ, в котором стереофотография выполняется посредством проецирования уже известного рисунка на объект.
[0012] Хранилище 5 картографических данных представляет собой базу данных, которая сохраняет высокоточные картографические данные. Хранилище 5 картографических данных может устанавливаться в рассматриваемом транспортном средстве или может задаваться на сервере и т.п. Картографические данные включают в себя не только общую картографическую информацию относительно дорог, перекрестков, мостов, туннелей и т.п., но также и информацию структуры дороги по позиции и категории полосы движения для каждой полосы движения транспортных средств, по присутствию или отсутствию разделительной полосы, по позиции и форме каждого пешеходного перехода, велосипедных дорожек и т.п. Картографические данные дополнительно включают в себя информацию правил дорожного движения по запрету на поворот, запрету на обгон, одностороннем движении и т.п.
[0013] Модуль 7 оценки собственного местоположения формирует информацию собственного местоположения посредством оценки собственного местоположения рассматриваемого транспортного средства посредством использования глобальной системы позиционирования (GPS). Сформированная информация собственного местоположения включает в себя не только позиционную информацию относительно таких параметров, как широта и долгота рассматриваемого транспортного средства, но также и информацию относительно таких параметров, как полоса движения транспортных средств, направление движения и ориентация, в которой движется рассматриваемое транспортное средство.
[0014] Модуль 9 получения информации касательно транспортного средства получает информацию касательно транспортного средства по условиям движения рассматриваемого транспортного средства, которая включает в себя скорость рассматриваемого транспортного средства, полученную из датчика скорости транспортного средства, ускорение рассматриваемого транспортного средства, полученное из датчика ускорения, угловую скорость рассматриваемого транспортного средства, полученную из гиродатчика. Модуль 9 получения информации касательно транспортного средства может быть выполнен с возможностью получать информацию касательно транспортного средства непосредственно из каждого датчика или из бортовой сети, такой как, например, контроллерная сеть (CAN).
[0015] Модуль 13 вывода представляет собой модуль отображения для представления результата обнаружения объектов пассажиру транспортного средства. Модуль 13 вывода может представлять собой экран отображения бортовой навигационной системы либо дисплей для отображения изображения, захваченного посредством бортовой камеры. В противном случае, модуль 13 вывода может представлять собой дисплей на лобовом стекле.
[0016] Центральный контроллер 11 представляет собой контроллер, который выполняет процесс обнаружения объектов обнаружения объектов, присутствующих около рассматриваемого транспортного средства, посредством использования трехмерных данных измерения расстояния, полученных посредством модуля 3 получения данных измерения расстояния. Центральный контроллер 11 включает в себя модуль 21 извлечения запланированных областей движения, модуль 22 извлечения областей присутствия пересекающих объектов, модуль 23 определения областей обнаружения объектов, детектор 24 объектов, модуль 25 фильтрации, модуль 26 отслеживания объектов и модуль 27 оценки движения, которые представляют собой функциональные модули для выполнения процесса обнаружения объектов.
[0017] Далее приводится описание компонентов, включенных в центральный контроллер 11. Для начала, модуль 21 извлечения запланированных областей движения получает картографические данные из хранилища 5 картографических данных, информацию собственного местоположения из модуля 7 оценки собственного местоположения, информацию касательно транспортного средства из модуля 9 получения информации касательно транспортного средства и информацию плана движения из модуля 27 оценки движения. В силу этого, модуль 21 извлечения запланированных областей движения извлекает запланированную область движения, в которой рассматриваемое транспортное средство должно двигаться в будущем. В этот момент, модуль 21 извлечения запланированных областей движения задает запланированную область движения на основе информации плана движения. Запланированная область движения задается по запланированному пути движения из текущей позиции рассматриваемого транспортного средства в место назначения, в частности, в полосе движения транспортных средств на дороге, по которой рассматриваемое транспортное средство, как оценивается, должно двигаться. Соответственно, в случае если рассматриваемое транспортное средство должно выполнять левый поворот на перекрестке, запланированная область движения задается в полосе движения на левый поворот. В случае если рассматриваемое транспортное средство должно двигаться по прямой, запланированная область движения задается в полосе движения по прямой. Помимо этого, в случае если присутствуют несколько полос движения транспортных средств на дороге, запланированная область движения задается на одной из полос движения. В этой связи, информация плана движения не должна обязательно представлять собой информацию относительно запланированного пути движения из текущей позиции рассматриваемого транспортного средства в место назначения. Информация плана движения, например, может представлять собой информацию относительно запланированного пути движения из текущей позиции рассматриваемого транспортного средства в точку на пути к месту назначения, к примеру, запланированного пути движения из текущей позиции рассматриваемого транспортного средства до следующего перекрестка или запланированного пути движения из текущей позиции рассматриваемого транспортного средства в точку, в которой рассматриваемое транспортное средство должно завершать смену полосы движения.
[0018] Модуль 22 извлечения областей присутствия пересекающих объектов получает запланированную область движения, извлеченную посредством модуля 21 извлечения запланированных областей движения, и картографические данные из хранилища 5 картографических данных. С их использованием, модуль 22 извлечения областей присутствия пересекающих объектов оценивает и извлекает области присутствия пересекающих объектов, в которых присутствуют объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем в запланированной области движения. В частности, из информации структуры дороги, включенной в картографические данные, модуль 22 извлечения областей присутствия пересекающих объектов оценивает направления, в которых движутся соответствующие объекты, присутствующие около рассматриваемого транспортного средства, и оценивает области присутствия пересекающих объектов на основе оцененных направлений движения объектов.
[0019] Модуль 23 определения областей обнаружения объектов получает запланированную область движения, извлеченную посредством модуля 21 извлечения запланированных областей движения, и области присутствия пересекающих объектов, извлеченные посредством модуля 22 извлечения областей присутствия пересекающих объектов. С их использованием, модуль 23 определения областей обнаружения объектов определяет область обнаружения объектов, в которой следует обнаруживать объекты около рассматриваемого транспортного средства. В первом варианте осуществления, область обнаружения объектов определяется посредством комбинирования запланированной области движения и областей присутствия пересекающих объектов. Вместо этого, только области присутствия пересекающих объектов могут определяться в качестве области обнаружения объектов.
[0020] Детектор 24 объектов получает данные измерения расстояния, обнаруженные посредством модуля 3 получения данных измерения расстояния, и обнаруживает объекты, присутствующие около рассматриваемого транспортного средства. В частности, детектор 24 объектов обнаруживает трехмерные объекты посредством разделения группы точек измерения расстояния в данных измерения расстояния на точки измерения расстояния, принадлежащие наземным поверхностям, и точки измерения расстояния, принадлежащие трехмерным объектам. В этой связи, способ обнаружения объектов не ограничен способом на основе трехмерных данных расстояния, полученных посредством датчика измерения расстояния. Способ обнаружения объектов может представлять собой способ на основе трехмерных данных, полученных посредством других датчиков, таких как камера, радар миллиметрового диапазона и ультразвуковой датчик.
[0021] Модуль 25 фильтрации получает позиции и ориентации объектов, обнаруженных посредством детектора 24 объектов, а также области обнаружения объектов, определенной посредством модуля 23 определения областей обнаружения объектов. Из объектов, обнаруженных посредством детектора 24 объектов, модуль 25 фильтрации извлекает только объекты, присутствующие в области обнаружения объектов.
[0022] Модуль 26 отслеживания объектов получает объекты, извлеченные посредством модуля 25 фильтрации, и оценивает состояния объектов при выполнении кратковременного прогнозирования перемещения для объектов на основе предысторий перемещения объектов, таких как позиции, скорости и ускорения объектов. После этого, модуль 26 отслеживания объектов выполняет отслеживание объектов посредством определения того, являются или нет объекты, наблюдаемые в один момент времени, идентичными объектам, наблюдаемым в другой момент времени. В этой связи, расширенный фильтр Калмана (EKF), фильтр частиц и т.п. может использоваться для способа отслеживания объектов.
[0023] С учетом путей и текущих позиций соответствующих объектов, полученных в процессе посредством модуля 26 отслеживания объектов, модуль 27 оценки движения формирует план движения рассматриваемого транспортного средства и выводит информацию плана движения. Информация плана движения представляет собой запланированный путь движения из текущей позиции рассматриваемого транспортного средства в место назначения, который формируется с учетом объектов, обнаруженных посредством использования трехмерных данных. Информация плана движения не является простой оценкой дороги, по которой должно двигаться рассматриваемое транспортное средство, и перекрестка, который рассматриваемое транспортное средство должно проезжать. Полоса движения транспортных средств, по которой должно двигаться рассматриваемое транспортное средство, также задается в информации плана движения. Поскольку обнаруженные объекты учитываются в любое время, путь, включающий в себя смены полосы движения, также задается в случае, если присутствует транспортное средство, которое движется на низкой скорости перед рассматриваемым транспортным средством в идентичной полосе движения, и в случае, если присутствует транспортное средство, которое останавливается перед рассматриваемым транспортным средством в идентичной полосе движения.
[0024] Следует отметить, что центральный контроллер 11 включает в себя: электронные схемы общего назначения, такие как микрокомпьютер, микропроцессор или центральный процессор (CPU); и периферийные устройства, такие как запоминающее устройство. Посредством выполнения конкретных программ, центральный контроллер 11 работает в качестве модуля 21 извлечения запланированных областей движения, модуля 22 извлечения областей присутствия пересекающих объектов, модуля 23 определения областей обнаружения объектов, детектора 24 объектов, модуля 25 фильтрации, модуля 26 отслеживания объектов и модуля 27 оценки движения. Эти функции центрального контроллера 11 могут реализовываться посредством одной или более схем обработки. Схемы обработки включают в себя, например, программируемое обрабатывающее устройство, такое как обрабатывающее устройство, включающее в себя электрическую схему, специализированную интегральную схему (ASIC), выполненную с возможностью, для центрального контроллера 11, выполнять функции, описанные в варианте осуществления, и устройство, такое как традиционная схемная часть.
[0025] Процедура для процесса обнаружения объектов
Далее, со ссылкой блок-схему последовательности операций способа на фиг. 2, приводится описание процесса обнаружения объектов, который должен выполняться посредством устройства 1 обнаружения объектов согласно настоящему изобретению.
[0026] Как проиллюстрировано на фиг. 2, во-первых, на этапе S10, модуль 21 извлечения запланированных областей движения получает картографические данные из хранилища 5 картографических данных, информацию собственного местоположения из модуля 7 оценки собственного местоположения, информацию касательно транспортного средства из модуля 9 получения информации касательно транспортного средства и информацию плана движения из модуля 27 оценки движения.
[0027] На этапе S20, на основе информации, полученной на этапе S10, модуль 21 извлечения запланированных областей движения извлекает запланированную область движения, в которой рассматриваемое транспортное средство должно двигаться в будущем, на карте. Как проиллюстрировано на фиг. 3, для начала, на основе информации собственного местоположения рассматриваемого транспортного средства, информации касательно транспортного средства и картографических данных по области около рассматриваемого транспортного средства, модуль 21 извлечения запланированных областей движения идентифицирует позицию рассматриваемого транспортного средства 30. После этого, на основе информации плана движения, полученной из модуля 27 оценки движения, модуль 21 извлечения запланированных областей движения распознает план движения, по которому рассматриваемое транспортное средство должно двигаться по прямой через перекресток, а также задает и извлекает запланированную область 32 движения, в которой рассматриваемое транспортное средство должно двигаться по прямой через перекресток.
[0028] На этапе S30, модуль 22 извлечения областей присутствия пересекающих объектов получает запланированную область движения, извлеченную на этапе S20, а также оценивает и извлекает области присутствия пересекающих объектов, в которых в данный момент присутствуют объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем в запланированной области движения. В этот момент, из информации структуры дороги, включенной в картографические данные, модуль 22 извлечения областей присутствия пересекающих объектов оценивает направления, в которых движутся соответствующие объекты, присутствующие около рассматриваемого транспортного средства, и оценивает области присутствия пересекающих объектов на основе оцененных направлений движения объектов. Более конкретно, из информации структуры дороги, модуль 22 извлечения областей присутствия пересекающих объектов получает информацию относительно таких параметров, как позиции и формы пересечений дорог и пешеходных переходов около текущей позиции рассматриваемого транспортного средства, направления движения для полос движения транспортных средств около текущей позиции рассматриваемого транспортного средства. В силу этого, модуль 22 извлечения областей присутствия пересекающих объектов обнаруживает категории дорог около текущей позиции рассматриваемого транспортного средства. Обнаруженные категории дорог включают в себя не только полосы движения транспортных средств на проезжих частях, но также и пешеходные переходы, велосипедные дорожки и т.п. После этого, как проиллюстрировано на фиг. 3, из обнаруженных категорий дорог, модуль 22 извлечения областей присутствия пересекающих объектов извлекает категории дорог, которые пересекают запланированную область 32 движения, и в силу этого извлекает области 34 присутствия пересекающих объектов. В этот момент, модуль 22 извлечения областей присутствия пересекающих объектов получает направления движения для полос движения транспортных средств из информации структуры дороги и оценивает полосы движения транспортных средств, направления движения которых указывают на запланированную область 32 движения, в качестве областей 34 присутствия пересекающих объектов. Например, в областях 34a, 34d на фиг. 3, направления движения для полос движения транспортных средств, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем, получаются в качестве направлений движения по прямой, и если объекты 36 в данный момент в областях 34a, 34d продолжают движение по прямой, объекты 36 должны пересекать запланированную область 32 движения. По этой причине, объекты 36 оцениваются в качестве объектов, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем, в то время как области 34a, 34b, в которых в данный момент присутствуют объекты 36, оцениваются в качестве областей присутствия пересекающих объектов. Аналогично, в области 34b, направление движения для полосы движения транспортных средств, которая с большой вероятностью должен пересекать рассматриваемое транспортное средство в будущем, получается в качестве направления левого поворота. Если объект 36 в данный момент в области 34b поворачивает налево, объект 36 должен пересекать запланированную область 32 движения. По этой причине, область 34b оценивается в качестве области присутствия пересекающих объектов. Помимо этого, категории дорог областей 34c, 34e представляют собой пешеходные переходы, и направления движения пешеходных переходов оцениваются в качестве пересечения направления движения рассматриваемого транспортного средства. Если пешеходы, в данный момент входящие в концы областей 34c, 34e, начинают идти по пешеходным переходам, пешеходы должны пересекать запланированную область 32 движения. По этой причине, пешеходы оцениваются в качестве объектов 36, которые должны пересекать запланированную область 32 движения, в то время как области 34c, 34e оцениваются в качестве областей присутствия пересекающих объектов. В этой связи, каждая область присутствия пересекающих объектов оценивается посредством включения ее окрестности, такой как пешеходный переход и пешеходный крытый переход вдоль дороги, с учетом области, в которую входит пешеход и/или велосипед.
[0029] На этапе S40, модуль 23 определения областей обнаружения объектов определяет область обнаружения объектов на основе запланированной области движения и областей присутствия пересекающих объектов. Как проиллюстрировано на фиг. 4, модуль 23 определения областей обнаружения объектов определяет область 40 обнаружения объектов посредством комбинирования запланированной области 32 движения и областей 34 присутствия пересекающих объектов на фиг. 3. В этой связи, только области присутствия пересекающих объектов могут определяться в качестве области обнаружения объектов.
[0030] На этапе S50, модуль 3 получения данных измерения расстояния, установленный в рассматриваемом транспортном средстве, получает трехмерные данные измерения расстояния (также называемые "данными расстояния") по окружению, включающему в себя объекты, которые должны быть обнаружены (включающие в себя не только трехмерные объекты, но также и поверхности дороги).
[0031] На этапе S60, детектор 24 объектов обнаруживает несколько трехмерных объектов на поверхностях дороги посредством разделения группы трехмерных точек измерения расстояния, полученных на этапе S50, на группы точек, принадлежащих поверхностям дороги, и на группы точек, принадлежащих нескольким трехмерным объектам. Кроме того, детектор 24 объектов оценивает позицию и ориентацию каждого трехмерного объекта из формы группы точек, принадлежащих трехмерному объекту. Кроме того, детектор 24 объектов оценивает то, каким является объект, из формы и предыстории перемещения каждого трехмерного объекта и предоставляет для обнаруженного объекта классификацию объекта (транспортное средство, пешеход, велосипед и т.п.). В этой связи, каждая классификация объекта может определяться согласно категории дорог на карте соответствующей области присутствия пересекающих объектов. Например, в случае если область присутствия пересекающих объектов представляет собой пешеходный переход на карте, объекту, обнаруженному в ней, предоставляется классификация объекта в качестве пешехода или велосипеда. Атрибут пешехода и атрибут велосипеда могут отличаться друг от друга согласно форме и т.п. объекта. В противном случае, если область присутствия пересекающих объектов представляет собой велосипедную дорожку на карте, объекту, обнаруженному в ней, предоставляется классификация объекта в качестве велосипеда.
[0032] На этапе S70, модуль 25 фильтрации выполняет процесс фильтрации для выбора только объектов, присутствующих в области обнаружения объектов, определенной на этапе S40, из объектов, обнаруженных на этапе S60. В силу этого, модуль 25 фильтрации извлекает объекты, которые должны обрабатываться на следующем этапе. Например, из объектов, проиллюстрированных на фиг. 4, объекты 36, присутствующие в области 40 обнаружения объектов, извлекаются через процесс фильтрации, но объекты 42, присутствующие за пределами области 40 обнаружения объектов, не извлекаются, другими словами, исключаются. Поскольку объекты, которые должны обрабатываться на следующем этапе, выбираются через этот процесс фильтрации, можно уменьшать нагрузку по обработке. В этой связи, процесс фильтрации для выбора только групп трехмерных точек измерения расстояния, присутствующих в области обнаружения объектов, определенной на этапе S40, из групп трехмерных точек измерения расстояния, полученных на этапе S50, может выполняться на этапе S60.
[0033] На этапе S80, модуль 26 отслеживания объектов оценивает состояния объектов, извлеченных на этапе S70, при выполнении кратковременного прогнозирования перемещения для объектов на основе предысторий перемещения объектов, таких как позиции, скорости и ускорения объектов. В силу этого, модуль 26 отслеживания объектов выполняет отслеживание объектов посредством определения того, являются или нет объекты, наблюдаемые в один момент времени, идентичными объектам, наблюдаемым в другой момент времени.
[0034] На этапе S90, на основе путей и текущих позиций соответствующих объектов, полученных в процессе отслеживания на этапе S80, модуль 27 оценки движения определяет план движения рассматриваемого транспортного средства. Другими словами, модуль 27 оценки движения формирует план движения посредством вычисления запланированного пути движения из текущей позиции рассматриваемого транспортного средства в место назначения с учетом обнаруженных объектов около рассматриваемого транспортного средства. В этот момент, не только дорога, по которой должно двигаться рассматриваемое транспортное средство, и перекресток, который должно проезжать рассматриваемое транспортное средство, задаются в запланированном пути движения, но также и полоса движения транспортных средств, по которой должно двигаться рассматриваемое транспортное средство, задается в запланированном пути движения. После того, как формирование плана движения посредством вычисления запланированного пути движения завершается, модуль 27 оценки движения выводит информацию плана движения. Модуль 27 оценки движения выводит информацию плана движения в модуль 21 извлечения запланированных областей движения и модуль 13 вывода. С этим выводом, процесс обнаружения объектов согласно первому варианту осуществления настоящего изобретения завершается.
[0035] Преимущества первого варианта осуществления
Как подробно описано выше, способ обнаружения объектов и устройство обнаружения объектов согласно первому варианту осуществления оценивают области присутствия пересекающих объектов, в которых в данный момент присутствуют объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем в запланированной области движения, и обнаруживают объекты посредством использования трехмерных данных по внутренней части областей присутствия пересекающих объектов. В силу этого, способ обнаружения объектов и устройство обнаружения объектов согласно первому варианту осуществления могут заблаговременно обнаруживать объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем. Кроме того, способ обнаружения объектов и устройство обнаружения объектов согласно первому варианту осуществления могут уменьшать нагрузку по обработке, поскольку они выбирают объекты для обработки на основе областей присутствия пересекающих объектов. Например, в современном уровне техники, как проиллюстрировано на фиг. 5, движущийся объект 51, присутствующий по запланированному пути 50 движения рассматриваемого транспортного средства 30, может обнаруживаться в качестве помехи, но другие движущиеся объекты 52, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство 30 в будущем, не могут обнаруживаться, поскольку движущиеся объекты 52 в данный момент не присутствуют по запланированному пути 50 движения. Напротив, способ обнаружения объектов и устройство обнаружения объектов согласно первому варианту осуществления оценивают области, в которых присутствуют объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем, в качестве областей присутствия пересекающих объектов, а также могут заблаговременно обнаруживать движущиеся объекты 52, которые в данный момент не присутствуют по запланированному пути 50 движения рассматриваемого транспортного средства.
[0036] Кроме того, способ обнаружения объектов и устройство обнаружения объектов согласно первому варианту осуществления задают запланированную область движения на основе информации плана движения по рассматриваемому транспортному средству. В силу этого, способ обнаружения объектов и устройство обнаружения объектов согласно первому варианту осуществления могут задавать запланированную область движения в соответствии с информацией плана движения по рассматриваемому транспортному средству и могут задавать запланированную область движения точно.
[0037] Кроме того, способ обнаружения объектов и устройство обнаружения объектов согласно первому варианту осуществления оценивают направления движения объектов, присутствующих около рассматриваемого транспортного средства, из информации структуры дороги, и оценивают области присутствия пересекающих объектов на основе оцененных направлений движения объектов. В силу этого, способ обнаружения объектов и устройство обнаружения объектов согласно первому варианту осуществления могут определять то, должны или нет с большой вероятностью пересекать объекты, которые не присутствуют по запланированному пути движения рассматриваемого транспортного средства, запланированную область движения, и могут оценивать области присутствия пересекающих объектов точно.
[0038] Второй вариант осуществления
Со ссылкой на чертежи, ниже предоставляется описание второго варианта осуществления настоящего изобретения. Процесс на этапе S30 в процессе обнаружения объектов согласно второму варианту осуществления отличается от процесса на этапе S30 в процессе обнаружения объектов согласно первому варианту осуществления. В первом варианте осуществления, области присутствия пересекающих объектов извлекаются посредством обнаружения категорий дорог, которые с большой вероятностью должны пересекать запланированную область движения. Напротив, во втором варианте осуществления, области присутствия пересекающих объектов оцениваются в зависимости от таких параметров, как то, должно или нет рассматриваемое транспортное средство двигаться по прямой, должно или нет рассматриваемое транспортное средство сменять полосу движения, должно или нет рассматриваемое транспортное средство въезжать в поток в полосе движения. В этой связи, конфигурация устройства 1 обнаружения объектов и процессы, за исключением процесса на этапе S30, являются идентичными между вторым вариантом осуществления и первым вариантом осуществления, и их подробные описания опускаются.
[0039] Как проиллюстрировано на фиг. 6, как только запланированная область движения извлекается на этапе S20, модуль 22 извлечения областей присутствия пересекающих объектов определяет на этапе S35 то, должно или нет рассматриваемое транспортное средство сменять полосу движения на многополосной дороге. Определение может выполняться в зависимости от того, включает или нет запланированная область движения, извлеченная на этапе S20, в себя смену полосы движения, либо в зависимости от того, включает или нет информация плана движения в себя смену полосы движения. Если модуль 22 извлечения областей присутствия пересекающих объектов определяет то, что рассматриваемое транспортное средство должно сменять полосу движения, процедура переходит к этапу S36. Если модуль 22 извлечения областей присутствия пересекающих объектов определяет то, что рассматриваемое транспортное средство не должно сменять полосу движения, процедура переходит к этапу S37.
[0040] На этапе S36, модуль 22 извлечения областей присутствия пересекающих объектов задает области присутствия пересекающих объектов, соответственно, в части полосы движения, в которую должно перемещаться рассматриваемое транспортное средство, и в части полосы движения, смежной с полосой движения, в которую должно перемещаться рассматриваемое транспортное средство, причем часть идет вперед и назад относительно рассматриваемого транспортного средства. В случае, проиллюстрированном на фиг. 7, поскольку рассматриваемое транспортное средство 30 должно выполнять смену полосы движения влево, области 75, 76 присутствия пересекающих объектов задаются в части полосы 71 движения, в которую должно перемещаться рассматриваемое транспортное средство 30, причем часть идет вперед и назад относительно рассматриваемого транспортного средства 30, в то время как область 76 присутствия пересекающих объектов задается в части полосы 72 движения, смежной с полосой 71 движения, в которую должно перемещаться рассматриваемое транспортное средство 30, причем часть идет вперед и назад относительно рассматриваемого транспортного средства 30. Например, в области 75, проиллюстрированной на фиг. 7, направление движения для полосы движения транспортных средств, которая с большой вероятностью должен пересекать рассматриваемое транспортное средство в будущем, обнаруживается в качестве направления движения по прямой или направления смены полосы движения вправо. Если объект в данный момент в области 75 начинает ускоряться, объект должен пересекать запланированную область 71 движения. По этой причине, объект оценивается в качестве объекта, который с большой вероятностью должен пересекать рассматриваемое транспортное средство в будущем, и область 75, в которой в данный момент присутствует объект, оценивается в качестве области присутствия пересекающих объектов. Аналогично, в области 76, направление движения для полосы движения транспортных средств, которая с большой вероятностью должен пересекать рассматриваемое транспортное средство в будущем, обнаруживается в качестве направления движения по прямой или направления смены полосы движения влево. Если объект в данный момент в области 76 начинает смену полосы движения влево, то объект должен пересекать запланированную область 71 движения. По этой причине, объект оценивается в качестве объекта, который с большой вероятностью должен пересекать рассматриваемое транспортное средство в будущем, и область 76, в которой в данный момент присутствует объект, оценивается в качестве области присутствия пересекающих объектов.
[0041] На этапе S37, модуль 22 извлечения областей присутствия пересекающих объектов задает области присутствия пересекающих объектов в частях полос движения, смежных с запланированной областью движения, причем части расположены впереди относительно рассматриваемого транспортного средства. Как проиллюстрировано на фиг. 8, в случае если рассматриваемое транспортное средство 30 должно двигаться по прямой, области 80 присутствия пересекающих объектов задаются в частях полос движения, смежных с запланированной областью 32 движения, причем части расположены впереди относительно рассматриваемого транспортного средства. Например, в каждой области 80, проиллюстрированной на фиг. 8, направление движения для полосы движения транспортных средств, которая с большой вероятностью должна пересекать рассматриваемое транспортное средство в будущем, обнаруживается в качестве направления смены полосы движения на полосу движения, в которой движется рассматриваемое транспортное средство. Если объект в данный момент в области 80 начинает смену полосы движения в полосу движения, в которой движется рассматриваемое транспортное средство, объект должен пересекать запланированную область 32 движения. По этой причине, объект оценивается в качестве объекта, который с большой вероятностью должен пересекать рассматриваемое транспортное средство в будущем, и область 80, в которой в данный момент присутствует объект, оценивается в качестве области присутствия пересекающих объектов.
[0042] Преимущества второго варианта осуществления
Как пояснено выше, в случае если рассматриваемое транспортное средство должно сменять полосу движения на многополосной дороге, способ обнаружения объектов и устройство обнаружения объектов согласно второму варианту осуществления оценивают области присутствия пересекающих объектов, соответственно, в части полосы движения, в которую должно перемещаться рассматриваемое транспортное средство, и в части полосы движения, смежной с полосой движения, в которую должно перемещаться рассматриваемое транспортное средство, причем части идут вперед и назад относительно рассматриваемого транспортного средства. В силу этого, даже в случае, если рассматриваемое транспортное средство должно сменять полосу движения на многополосной дороге, способ обнаружения объектов и устройство обнаружения объектов согласно второму варианту осуществления могут заблаговременно обнаруживать объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем, до и после смены полосы движения.
[0043] Кроме того, в случае если рассматриваемое транспортное средство должно двигаться по прямой на многополосной дороге, способ обнаружения объектов и устройство обнаружения объектов согласно второму варианту осуществления оценивают области присутствия пересекающих объектов в частях полос движения, смежных с запланированной областью движения, причем части расположены впереди относительно рассматриваемого транспортного средства. В силу этого, способ обнаружения объектов и устройство обнаружения объектов согласно второму варианту осуществления могут заблаговременно обнаруживать объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем, с учетом таких параметров, как вероятность того, что любой из объектов перемещается внезапно впереди рассматриваемого транспортного средства в то время, когда рассматриваемое транспортное средство движется прямой на многополосной дороге.
[0044] Третий вариант осуществления
Со ссылкой на чертежи, ниже предоставляется описание третьего варианта осуществления, который является вариантом применения настоящего изобретения. Процесс на этапе S30 в процессе обнаружения объектов согласно третьему варианту осуществления отличается от процессов на этапе S30 в процессах обнаружения объектов согласно первому и второму вариантам осуществления. В первом и втором вариантах осуществления, размер областей присутствия пересекающих объектов задается постоянным. Напротив, в третьем варианте осуществления, размер областей присутствия пересекающих объектов задается в зависимости от скорости рассматриваемого транспортного средства или относительной скорости между рассматриваемым транспортным средством и объектами, присутствующими около рассматриваемого транспортного средства. В этой связи, процессы, отличные от процесса на этапе S30, являются идентичными между третьим вариантом осуществления и первым вариантом осуществления, и подробные описания опускаются.
[0045] Как проиллюстрировано на фиг. 9, устройство 100 обнаружения объектов согласно третьему варианту осуществления отличается от устройств обнаружения объектов согласно первому и второму вариантам осуществления тем, что устройство 100 обнаружения объектов дополнительно включает в себя модуль 90 получения относительной скорости. Модуль 90 получения относительной скорости получает относительную скорость между рассматриваемым транспортным средством и объектами, присутствующими около рассматриваемого транспортного средства, посредством использования лазерного радара и т.п. В этой связи, конфигурация устройства обнаружения объектов, за исключением модуля 90 получения относительной скорости, является идентичной между третьим вариантом осуществления и первым вариантом осуществления, и подробные описания конфигурации опускаются.
[0046] Как проиллюстрировано на фиг. 10, процесс обнаружения объектов согласно третьему варианту осуществления отличается от процесса обнаружения объектов согласно второму варианту осуществления тем, что процесс обнаружения объектов согласно третьему варианту осуществления включает в себя этапы S31- 33 в дополнение к этапам в процессе обнаружения объектов согласно второму варианту осуществления, проиллюстрированному на фиг. 6. В этой связи, процесс обнаружения объектов согласно третьему варианту осуществления может включать в себя этапы S31-S33 в дополнение к этапам в процессе обнаружения объектов согласно первому варианту осуществления. После того, как запланированная область движения извлекается на этапе S20, модуль 22 извлечения областей присутствия пересекающих объектов задает размер L1 областей присутствия пересекающих объектов на этапе S31, в зависимости от абсолютной скорости Vs рассматриваемого транспортного средства, полученной из модуля 9 получения информации касательно транспортного средства. Размер L1 областей присутствия пересекающих объектов может задаваться, например, посредством вычисления L1=αVs, где α является константой количественного отношения.
[0047] На этапе S32, модуль 22 извлечения областей присутствия пересекающих объектов задает размер L2 областей присутствия пересекающих объектов в зависимости от относительной скорости Vo между рассматриваемым транспортным средством и объектами, присутствующими около рассматриваемого транспортного средства, которая получается из модуля 90 получения относительной скорости. Размер L2 областей присутствия пересекающих объектов может задаваться, например, посредством вычисления L2=βVo, где β является константой количественного отношения. В этой связи, относительная скорость Vo, например, может быть средним относительных скоростей между рассматриваемым транспортным средством и наблюдаемыми транспортными средствами или наибольшим значением, которое является наибольшим из числа относительных скоростей между рассматриваемым транспортным средством и наблюдаемыми транспортными средствами. В противном случае, относительная скорость Vo может представлять собой относительную скорость между рассматриваемым транспортным средством и объектами, обнаруженными посредством детектора 24 объектов.
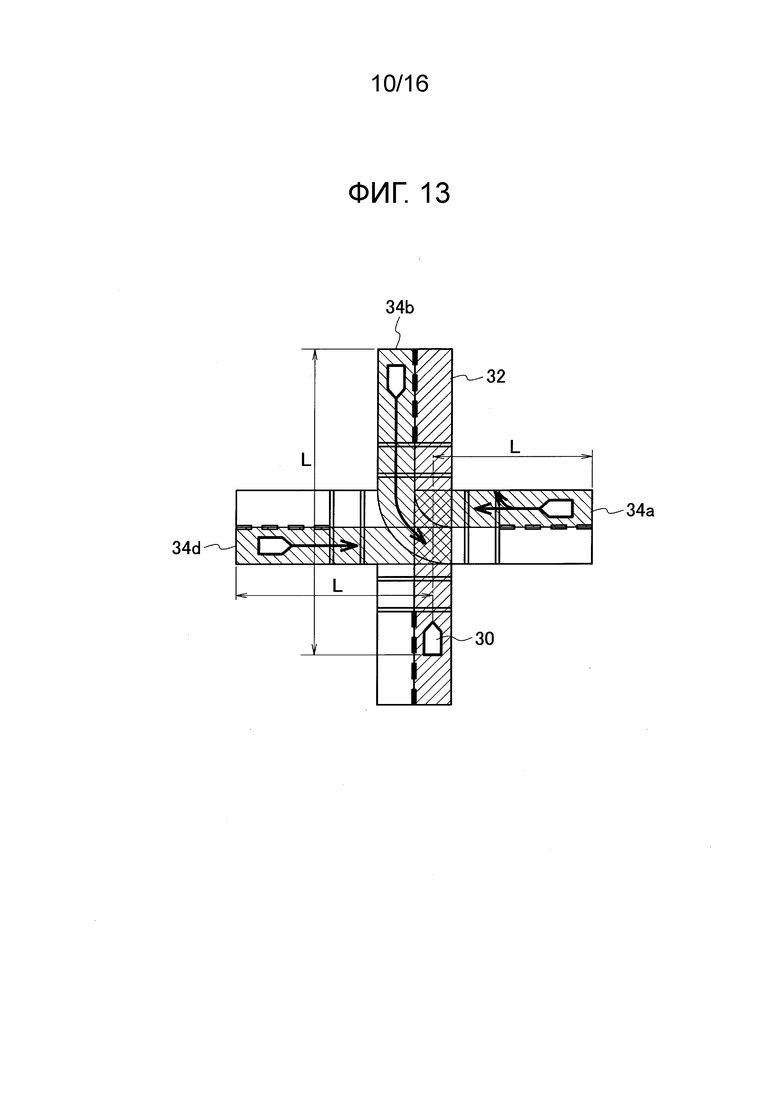
[0048] На этапе S33, модуль 22 извлечения областей присутствия пересекающих объектов определяет размер L областей присутствия пересекающих объектов посредством выбора либо размера L1, заданного на этапе S31, либо размера L2, заданного на этапе S32. Например, в случае если рассматриваемое транспортное средство движется на многополосной дороге, модуль 22 извлечения областей присутствия пересекающих объектов может определять и использовать больший из размера L1 и размера L2. В случае если рассматриваемое транспортное средство и транспортные средства около рассматриваемого транспортного средства движутся на низкой скорости вследствие затора в движении, размер L областей 80 присутствия пересекающих объектов, другими словами, длина областей 80 присутствия пересекающих объектов в направлении движения рассматриваемого транспортного средства, может задаваться меньшим, как проиллюстрировано на фиг. 11. Другими словами, достаточно удостоверяться в том, что помехи в диапазоне, который затрагивает план движения рассматриваемого транспортного средства, обнаруживаются. Следовательно, по мере того, как относительная скорость становится более низкой, только объекты в области ближе к рассматриваемому транспортному средству могут обнаруживаться в областях, в которых присутствуют объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем. С другой стороны, в случае если рассматриваемое транспортное средство и транспортные средства около рассматриваемого транспортного средства движутся на высокой скорости на шоссе, размер L областей присутствия пересекающих объектов может задаваться большим, как проиллюстрировано на фиг. 12. Другими словами, требуется обнаруживать помехи в области, которая затрагивает план движения рассматриваемого транспортного средства. Следовательно, по мере того, как относительная скорость становится более высокой, объекты в области дальше от рассматриваемого транспортного средства должны обнаруживаться в областях, в которых присутствуют объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем. Кроме того, в случае если, как проиллюстрировано на фиг. 13, рассматриваемое транспортное средство останавливается на перекрестке при ожидании переключения сигнала светофора на голубой цвет, так что относительная скорость между рассматриваемым транспортным средством и транспортными средствами около рассматриваемого транспортного средства является большой, может использоваться размер L1 или размер L2, значение которого является большими из двух размеров. В противном случае, может использоваться размер L2, заданный в зависимости от относительной скорости. Это позволяет увеличивать размер L областей присутствия пересекающих объектов, другими словами, длину областей присутствия пересекающих объектов в направлении движения других транспортных средств. После того, как размер областей присутствия пересекающих объектов задается, как пояснено выше, процедура переходит к этапу S35.
[0049] Преимущества третьего варианта осуществления
Как подробно пояснено выше, способ обнаружения объектов и устройство обнаружения объектов согласно третьему варианту осуществления задают размер областей присутствия пересекающих объектов в зависимости от скорости рассматриваемого транспортного средства или относительной скорости между рассматриваемым транспортным средством и транспортными средствами около рассматриваемого транспортного средства. В силу этого, в зависимости от условий вождения около рассматриваемых транспортных средств, способ обнаружения объектов и устройство обнаружения объектов согласно третьему варианту осуществления могут задавать необходимые области присутствия пересекающих объектов в диапазоне, который затрагивает план движения рассматриваемого транспортного средства.
[0050] Четвертый вариант осуществления
Со ссылкой на чертежи, ниже предоставляется описание четвертого варианта осуществления, который является вариантом применения настоящего изобретения. Процесс на этапе S10 в процессе обнаружения объектов согласно четвертому варианту осуществления отличается от процесса на этапе S10 в процессе обнаружения объектов согласно первому варианту осуществления. В первом варианте осуществления, информация плана движения получается, и запланированная область движения задается на основе информации плана движения. Напротив, в четвертом варианте осуществления, категория полосы движения для полосы движения транспортных средств, в которой движется рассматриваемое транспортное средство, получается из информации структуры дороги, включенной в картографические данные, и запланированная область движения извлекается на основе категории полосы движения. В этой связи, конфигурация устройства 1 обнаружения объектов и процессы, за исключением процесса на этапе S10, являются идентичными между четвертым вариантом осуществления и первым вариантом осуществления, и их подробные описания опускаются.
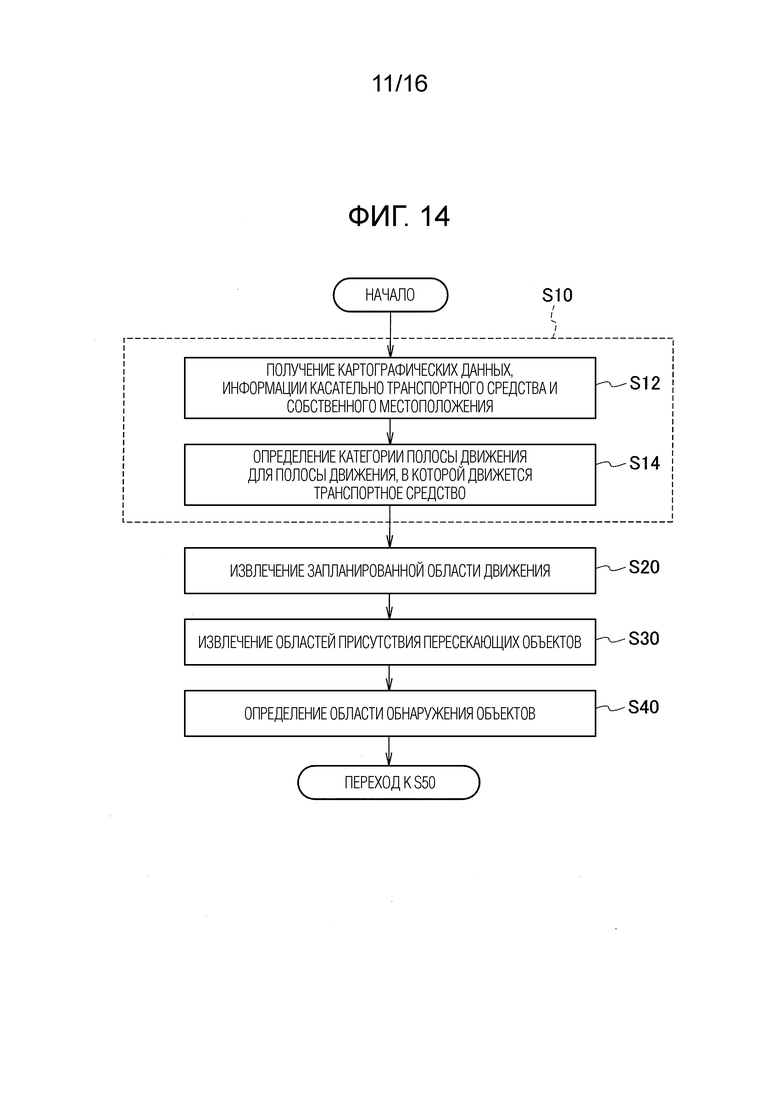
[0051] Как проиллюстрировано на фиг. 14, процесс обнаружения объектов согласно четвертому варианту осуществления отличается от процесса обнаружения объектов, согласно первому варианту осуществления проиллюстрированного на фиг. 2, тем, что процесс обнаружения объектов согласно четвертому варианту осуществления включает в себя этапы S12 и S14 вместо этапа S10 в процессе обнаружения объектов согласно первому варианту осуществления. В этой связи, процесс обнаружения объектов согласно четвертому варианту осуществления может включать в себя этапы S12 и S14 в дополнение к процессу обнаружения объектов согласно второму варианту осуществления или согласно третьему варианту осуществления. На этапе S12, модуль 21 извлечения запланированных областей движения получает картографические данные из хранилища 5 картографических данных, информацию собственного местоположения из модуля 7 оценки собственного местоположения и информацию касательно транспортного средства из модуля 9 получения информации касательно транспортного средства, но не информацию плана движения из модуля 27 оценки движения.
[0052] На этапе S14, из информации собственного местоположения рассматриваемого транспортного средства и информации структуры дороги, включенной в картографические данные, модуль 21 извлечения запланированных областей движения получает категорию полосы движения для полосы движения транспортных средств, в которой движется рассматриваемое транспортное средство. В информации структуры дороги, направления движения для полос движения транспортных средств, к примеру, полоса движения на правый поворот, полоса движения на левый поворот, полоса движения по прямой и полоса движения на левый поворот и по прямой, записываются в качестве категорий полосы движения. Таким образом, модуль 21 извлечения запланированных областей движения обнаруживает полосу движения транспортных средств, в которой движется рассматриваемое транспортное средство, из информации собственного местоположения и получает категорию полосы движения для полосы движения транспортных средств, в которой движется рассматриваемое транспортное средство, из информации структуры дороги.
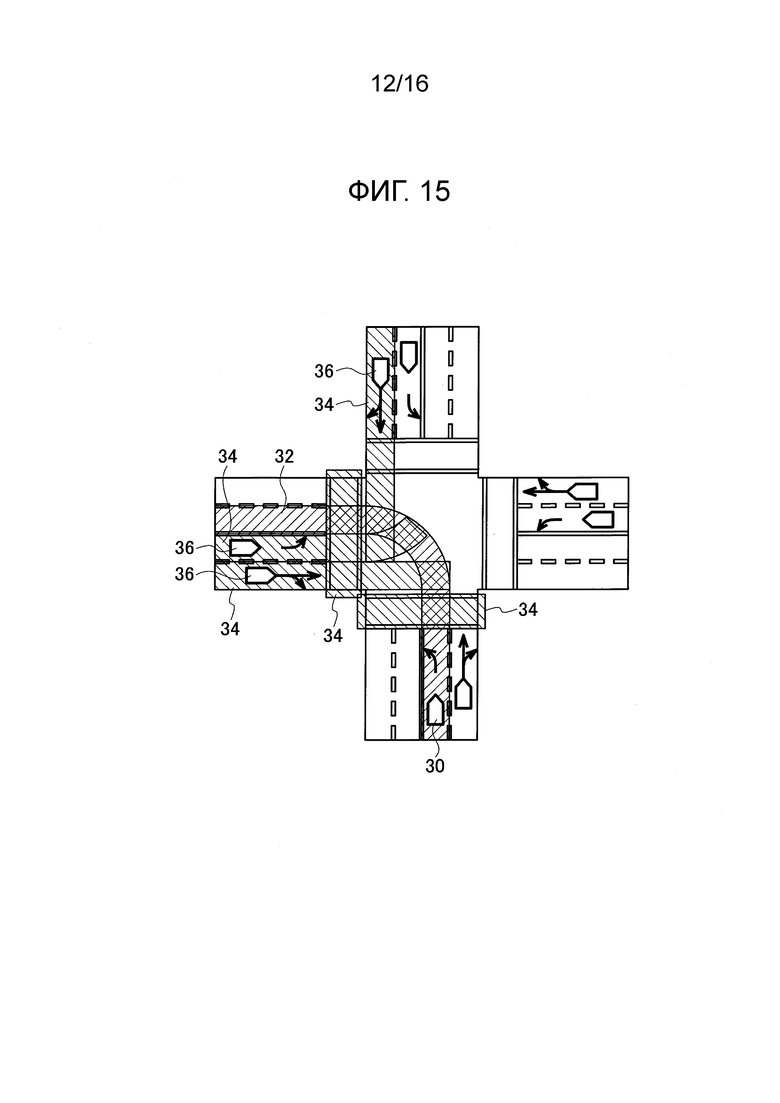
[0053] На этапе S20, на основе информации, полученной на этапах S12 и S14, модуль 21 извлечения запланированных областей движения извлекает запланированную область движения, в которой рассматриваемое транспортное средство должно двигаться в будущем, на карте. В частности, на основе категории полосы движения, определенной на этапе S14, модуль 21 извлечения запланированных областей движения извлекает запланированную область движения. Например, в случае если, как проиллюстрировано на фиг. 15, рассматриваемое транспортное средство 30 движется вдоль полосы движения транспортных средств исключительно для левого поворота на перекрестке, модуль 21 извлечения запланированных областей движения может задавать запланированную область 32 движения в качестве пути на левый поворот на основе категории полосы движения без получения информации плана движения из модуля 27 оценки движения. В этой связи, модуль 21 извлечения запланированных областей движения может задавать запланированную область движения более точно с учетом категории полосы движения, поясненной в этом варианте осуществления, и информации плана движения, поясненной в первом варианте осуществления.
[0054] Преимущества четвертого варианта осуществления
Как пояснено выше, способ обнаружения объектов и устройство обнаружения объектов согласно четвертому варианту осуществления получают категорию полосы движения для полосы движения транспортных средств, в которой движется рассматриваемое транспортное средство, из информации структуры дороги, включенной в картографические данные, и задают запланированную область движения на основе категории полосы движения. В силу этого, способ обнаружения объектов и устройство обнаружения объектов согласно четвертому варианту осуществления могут задавать направление движения рассматриваемого транспортного средства из категории полосы движения и могут задавать запланированную область движения точно в зависимости от полосы движения транспортных средств, в которой в данный момент движется рассматриваемое транспортное средство.
[0055] Пятый вариант осуществления
Со ссылкой на чертежи, ниже предоставляется описание пятого варианта осуществления, который является вариантом применения настоящего изобретения. Процесс обнаружения объектов согласно пятому варианту осуществления отличается от процесса обнаружения объектов согласно первому варианту осуществления тем, что процесс обнаружения объектов согласно пятому варианту осуществления оценивает каждую извлеченную область присутствия пересекающих объектов на основе состояния сигнала светофора и правил дорожного движения. В этой связи, процессы, за исключением процессов на добавленных этапах, являются идентичными между пятым вариантом осуществления и первым вариантом осуществления, и их подробные описания опускаются.
[0056] Как проиллюстрировано на фиг. 16, устройство 200 обнаружения объектов согласно пятому варианту осуществления отличается от устройств обнаружения объектов согласно первому-четвертому вариантам осуществления тем, что устройство 200 обнаружения объектов дополнительно включает в себя модуль 210 распознавания сигналов светофора и модуль 220 распознавания правил дорожного движения. Модуль 210 распознавания сигналов светофора распознает состояния сигналов светофора вдоль запланированного пути движения рассматриваемого транспортного средства посредством использования изображений, захваченных посредством камеры, установленной в рассматриваемом транспортном средстве, информации, полученной через связь между транспортным средством и дорожной инфраструктурой, и т.п. Состояния сигналов светофора, которые должны распознаваться посредством модуля 210 распознавания сигналов светофора, включают в себя обычные красные, синие и желтые световые сигналы, а также направления сигналов со стрелкой. Модуль 210 распознавания сигналов светофора дополнительно распознает состояния сигналов светофора пешеходного перехода. Модуль 220 распознавания правил дорожного движения распознает правила дорожного движения, регулирующие дороги около рассматриваемого транспортного средства, посредством использования информации правил дорожного движения, включенной в картографические данные, и изображений дорожных знаков, захваченных посредством камеры, установленной в рассматриваемом транспортном средстве. Знаки одностороннего движения, знаки "правый поворот запрещен", знаки "левый поворот запрещен", знаки "въезд запрещен" и т.п., отображаемые на столбах с дорожными знаками, распознаются в качестве правил дорожного движения. В этой связи, остальная конфигурация является идентичной между пятым вариантом осуществления и первым вариантом осуществления, и ее подробные описания опускаются.
[0057] Процесс обнаружения объектов согласно пятому варианту осуществления отличается от процесса обнаружения объектов согласно первому варианту осуществления тем, что, как проиллюстрировано на фиг. 17, процесс обнаружения объектов согласно пятому варианту осуществления включает в себя этапы S38 и S39 в дополнение к этапам, включенным в процесс обнаружения объектов согласно первому варианту осуществления. Вместо этого, процесс обнаружения объектов согласно пятому варианту осуществления может включать в себя этапы S38 и S39 в дополнение к этапам, включенным в процесс обнаружения объектов согласно любому из второго-четвертого вариантов осуществления. После того, как области присутствия пересекающих объектов извлекаются на этапе S30, модуль 22 извлечения областей присутствия пересекающих объектов на этапе S38 получает результат распознавания состояния светофора из модуля 210 распознавания сигналов светофора и получает результат распознавания правил дорожного движения из результата 220 распознавания правил дорожного движения.
[0058] На этапе S39, на основе полученных результатов распознавания, модуль 22 извлечения областей присутствия пересекающих объектов исключает области, в которых не присутствуют объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем, из областей присутствия пересекающих объектов, извлеченных на этапе S30, и в силу этого оценивает конечные области присутствия пересекающих объектов. В случае если, как проиллюстрировано на фиг. 18, рассматриваемое транспортное средство 30 едет по прямой через перекресток в то время, когда сигнал светофора является синим, сигналы светофора для пешеходных переходов являются красными, и рассматриваемое транспортное средство 30 с большой вероятностью более не должно пересекать пешеходов. По этой причине, области 39a, 39b в пешеходных переходах исключаются из областей присутствия пересекающих объектов. Аналогично, поскольку сигнал светофора, который управляет дорогой, идущей налево от перекрестка, является красным, область 39c также исключается из областей присутствия пересекающих объектов. С другой стороны, хотя сигнал светофора, который управляет дорогой, идущей направо от перекрестка, является красным, транспортное средство на дороге может поворачивать направо, и область 34a не исключается из областей присутствия пересекающих объектов.
[0059] Кроме того, в случае если, как проиллюстрировано на фиг. 19, правила дорожного движения обозначают одностороннее движение за пределами перекрестка, направление области 39d является идентичным направлению полосы движения, в которой рассматриваемое транспортное средство 30 должно двигаться по прямой через перекресток, и область 39d не представляет собой встречную полосу движения. Таким образом, транспортные средства в области 39d с большой вероятностью более не должны поворачивать налево к рассматриваемому транспортному средству, и область 39d исключается из областей присутствия пересекающих объектов на основе результата распознавания правил дорожного движения. Соответственно, число областей присутствия пересекающих объектов может надлежащим образом уменьшаться даже в окружении, в котором категория полосы движения дороги изменяется с определенными временными интервалами.
[0060] Преимущества пятого варианта осуществления
Как пояснено выше, способ обнаружения объектов и устройство обнаружения объектов согласно пятому варианту осуществления оценивают области присутствия пересекающих объектов на основе состояний сигналов светофора около рассматриваемого транспортного средства. В силу этого, способ обнаружения объектов и устройство обнаружения объектов согласно пятому варианту осуществления более не должны обнаруживать объекты, перемещения которых запрещаются посредством красного сигнала светофора, и могут уменьшать нагрузку по обработке.
[0061] Кроме того, способ обнаружения объектов и устройство обнаружения объектов согласно пятому варианту осуществления сокращают число областей присутствия пересекающих объектов на основе правил дорожного движения, регулирующих область около рассматриваемых транспортных средств. В силу этого, способ обнаружения объектов и устройство обнаружения объектов согласно пятому варианту осуществления более не должны обнаруживать объекты, перемещения которых запрещаются посредством правил дорожного движения, и могут уменьшать нагрузку по обработке.
[0062] Следует отметить, что вышеприведенные варианты осуществления являются примерами настоящего изобретения. Настоящее изобретение не ограничено посредством вариантов осуществления. Очевидно, что настоящее изобретение может модифицироваться различными способами в режимы, отличающиеся от вариантов осуществления, в соответствии с проектными решениями и т.п. в пределах объема без отступления от технических идей настоящего изобретения.
Список позиционных обозначений
[0063] 1, 100, 200 - устройство обнаружения объектов
3 - модуль получения данных измерения расстояния
5 - хранилище картографических данных
7 - модуль оценки собственного местоположения
9 - модуль получения информации касательно транспортного средства
11 - центральный контроллер
13 - модуль вывода
21 - модуль извлечения запланированных областей движения
22 - модуль извлечения областей присутствия пересекающих объектов
23 - модуль определения областей обнаружения объектов
24 - детектор объектов
25 - модуль фильтрации
26 - модуль отслеживания объектов
27 - модуль оценки движения
90 - модуль получения относительной скорости
210 - модуль распознавания сигналов светофора
220 - модуль распознавания правил дорожного движения
Группа изобретений относится к устройству и способу обнаружения объектов. Способ, осуществляющийся устройством обнаружения объектов, включает следующие шаги. Получают трехмерные данные по области около рассматриваемого транспортного средства посредством использования датчика измерения расстояния. На основе картографических данных извлекают полосу движения, по которой транспортное средство должно двигаться по запланированному пути движения. На основе информации структуры дороги, включенной в картографические данные, оценивают категорию дорог, направления движения которых указывают на запланированную область движения, в качестве областей присутствия пересекающих объектов, в которых в данный момент присутствуют объекты, которые с большей вероятностью должны пересекать рассматриваемое транспортное средство в будущем в запланированной области движения. Извлекают области присутствия пересекающих объектов и обнаруживают объект посредством использования трехмерных данных по внутренним частям областей присутствия пересекающих объектов. Обеспечивается заблаговременное обнаружение объекта, который с большой вероятностью должен пересекать путь рассматриваемого транспортного средства в будущем. 2 н. и 8 з.п. ф-лы, 19 ил.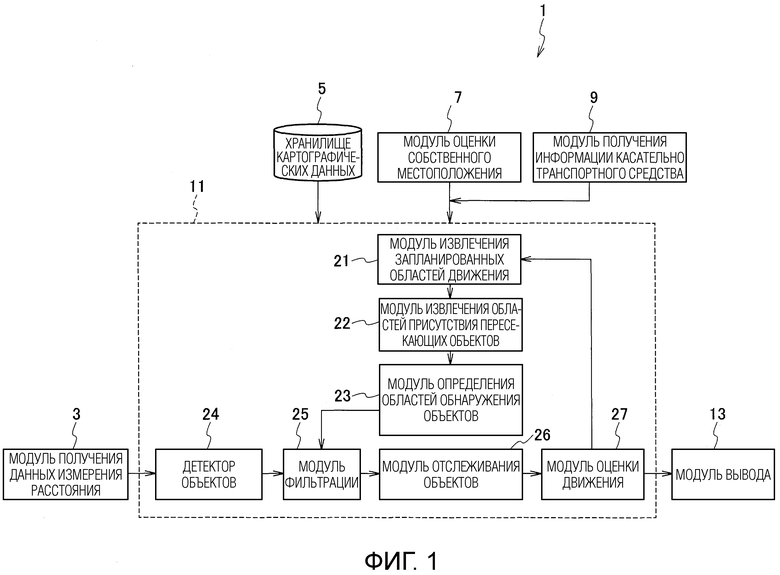
1. Способ обнаружения объектов для устройства обнаружения объектов, включающего в себя датчик измерения расстояния для получения трехмерных данных по области около рассматриваемого транспортного средства и выполненного с возможностью обнаруживать объект посредством использования трехмерных данных, полученных посредством датчика измерения расстояния, содержащий этапы, на которых:
на основе картографических данных по области около текущей позиции рассматриваемого транспортного средства извлекают полосу движения транспортных средств, по которой рассматриваемое транспортное средство, как оценивается, должно двигаться по запланированному пути движения из текущей позиции рассматриваемого транспортного средства в место назначения, в качестве запланированной области движения,
на основе информации структуры дороги, включенной в картографические данные, оценивают категории дорог, направления движения которых указывают на запланированную область движения, в качестве областей присутствия пересекающих объектов, в которых в данный момент присутствуют объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем в запланированной области движения,
обнаруживают категории дорог около текущей позиции рассматриваемого транспортного средства из информации структуры дороги, извлекают области присутствия пересекающих объектов посредством извлечения категорий дорог, которые пересекают запланированную область движения, из обнаруженных категорий дорог и
обнаруживают объект посредством использования трехмерных данных по внутренним частям областей присутствия пересекающих объектов.
2. Способ обнаружения объектов по п. 1, в котором запланированная область движения задается на основе информации плана движения рассматриваемого транспортного средства.
3. Способ обнаружения объектов по п. 1 или 2, в котором направления движения объектов, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем, оцениваются из запланированной области движения и информации структуры дороги, включенной в картографические данные,
области присутствия пересекающих объектов оцениваются на основе направлений движения.
4. Способ обнаружения объектов по п. 1 или 2, в котором в случае, если рассматриваемое транспортное средство должно сменять полосу движения, области присутствия пересекающих объектов оцениваются в части полосы движения, в которую должно перемещаться рассматриваемое транспортное средство, и в части полосы движения, смежной с полосой движения, в которую должно перемещаться рассматриваемое транспортное средство, причем части протягиваются вперед и назад относительно рассматриваемого транспортного средства.
5. Способ обнаружения объектов по п. 1 или 2, в котором в случае, если рассматриваемое транспортное средство должно двигаться по прямой на многополосной дороге, области присутствия пересекающих объектов оцениваются в частях полос движения, смежных с запланированной областью движения, причем части расположены впереди относительно рассматриваемого транспортного средства.
6. Способ обнаружения объектов по п. 1 или 2, в котором размер областей присутствия пересекающих объектов задается в зависимости от скорости рассматриваемого транспортного средства или относительной скорости между рассматриваемым транспортным средством и объектами, присутствующими около рассматриваемого транспортного средства.
7. Способ обнаружения объектов по п. 1 или 2, в котором запланированная область движения задается на основе категории полосы движения для полосы движения транспортных средств, в которой движется рассматриваемое транспортное средство, причем категория полосы движения записана в информацию структуры дороги, включенную в картографические данные.
8. Способ обнаружения объектов по п. 1 или 2, в котором области присутствия пересекающих объектов оцениваются на основе состояния сигнала светофора около рассматриваемого транспортного средства.
9. Способ обнаружения объектов по п. 1 или 2, в котором области присутствия пересекающих объектов оцениваются на основе правил дорожного движения, регулирующих область около рассматриваемого транспортного средства.
10. Устройство обнаружения объектов, включающее в себя датчик измерения расстояния для получения трехмерных данных по области около рассматриваемого транспортного средства и выполненное с возможностью обнаруживать объект посредством использования трехмерных данных, полученных посредством датчика измерения расстояния, содержащее контроллер для:
на основе картографических данных по области около текущей позиции рассматриваемого транспортного средства извлечения полосы движения транспортных средств, по которой рассматриваемое транспортное средство, как оценивается, должно двигаться по запланированному пути движения из текущей позиции рассматриваемого транспортного средства в место назначения, в качестве запланированной области движения,
на основе информации структуры дороги, включенной в картографические данные, оценки категорий дорог, направления движения которых указывают на запланированную область движения, в качестве областей присутствия пересекающих объектов, в которых в данный момент присутствуют объекты, которые с большой вероятностью должны пересекать рассматриваемое транспортное средство в будущем в запланированной области движения,
обнаружения категорий дорог около текущей позиции рассматриваемого транспортного средства из информации структуры дороги, извлечения областей присутствия пересекающих объектов посредством извлечения категорий дорог, которые пересекают запланированную область движения, из обнаруженных категорий дорог и
обнаружения объекта посредством использования трехмерных данных по внутренним частям областей присутствия пересекающих объектов.
| УСТРОЙСТВО КОНТРОЛЯ ВОЖДЕНИЯ | 2010 |
|
RU2520855C2 |
| Самолет | 1929 |
|
SU17016A1 |
| US 20150153184 A1, 04.06.2015 | |||
| Лазерный интерферометр для измерения линейных перемещений объекта | 1991 |
|
SU1793204A1 |

