Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу отслеживания объектов и к устройству отслеживания объектов.
Уровень техники
[0002] Известен способ продолжения отслеживания объекта в случае, если объект перекрывается и скрывается позади другого объекта (патентный документ 1). Согласно патентному документу 1, определяется то, повторно появляется или нет скрытый объект, на основе оцененной информации относительно объекта, и идентичный идентификационный номер назначается объекту, когда объект повторно появляется.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент Японии номер 2007-334631
Сущность изобретения
Техническая задача
[0004] Тем не менее, в случае если несколько объектов одновременно скрываются позади другого объекта, и условия нескольких объектов изменяются в то время, когда несколько объектов скрываются позади другого объекта, технология патентного документа 1 с большой вероятностью должна приводить к тому, что оцененная информация отклоняется от фактического состояния, и, соответственно, назначать неправильные идентификационные номера объектам, которые повторно появляются.
[0005] Настоящее изобретение осуществлено с учетом вышеуказанной проблемы. Задача настоящего изобретения заключается в том, чтобы предоставлять способ отслеживания объектов и устройство отслеживания объектов, которые, даже в случае, если несколько объектов входят в скрытую область и временно исчезают, допускают предотвращение назначения каждому объекту неправильной идентификационной информации, отличающейся от информации, которая назначается объекту до того, как объект скрывается.
Решение задачи
[0006] Устройство отслеживания объектов согласно одному аспекту настоящего изобретения оценивает позиционную взаимосвязь между несколькими объектами в скрытой области в случае, если несколько объектов входят в скрытую область. Когда несколько объектов выходят из скрытой области, устройство отслеживания объектов определяет идентификационную информацию относительно каждого объекта на основе оцененной позиционной взаимосвязи.
Преимущества изобретения
[0007] Даже в случае, если несколько объектов входят в скрытую область и временно исчезают, настоящее изобретение позволяет предотвращать назначение каждому объекту неправильной идентификационной информации, отличающейся от информации, которая назначается объекту до того, как объект скрывается.
Краткое описание чертежей
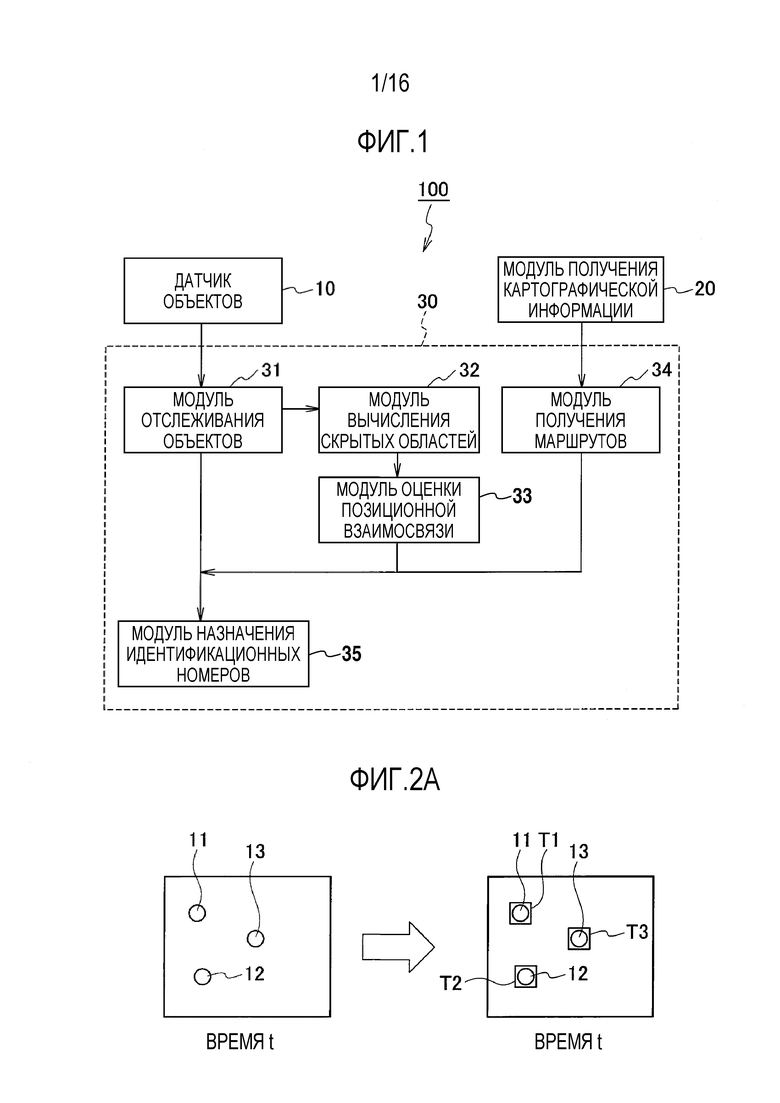
[0008] Фиг. 1 является схемой конфигурации устройства отслеживания объектов согласно первому варианту осуществления настоящего изобретения.
Фиг. 2A является схемой для пояснения способа отслеживания объектов согласно первому варианту осуществления настоящего изобретения.
Фиг. 2B является другой схемой для пояснения способа отслеживания объектов согласно первому варианту осуществления настоящего изобретения.
Фиг. 2C является еще одной другой схемой для пояснения способа отслеживания объектов согласно первому варианту осуществления настоящего изобретения.
Фиг. 3 является схемой для пояснения скрытой области согласно первому варианту осуществления настоящего изобретения.
Фиг. 4A является схемой для пояснения того, как определять идентификационную информацию относительно объекта в первом варианте осуществления настоящего изобретения.
Фиг. 4B является другой схемой для пояснения того, как определять идентификационную информацию относительно объекта в первом варианте осуществления настоящего изобретения.
Фиг. 4C является еще одной другой схемой для пояснения того, как определять идентификационную информацию относительно объекта в первом варианте осуществления настоящего изобретения.
Фиг. 4D является еще одной другой схемой для пояснения того, как определять идентификационную информацию относительно объекта в первом варианте осуществления настоящего изобретения.
Фиг. 5 является схемой для пояснения номера для отслеживания объекта, который выходит из скрытой области в первом варианте осуществления настоящего изобретения.
Фиг. 6 является блок-схемой последовательности операций способа для пояснения примера того, как работает устройство отслеживания объектов согласно первому варианту осуществления настоящего изобретения.
Фиг. 7A является схемой для пояснения того, как определять идентификационную информацию относительно объекта во втором варианте осуществления настоящего изобретения.
Фиг. 7B является другой схемой для пояснения того, как определять идентификационную информацию относительно объекта во втором варианте осуществления настоящего изобретения.
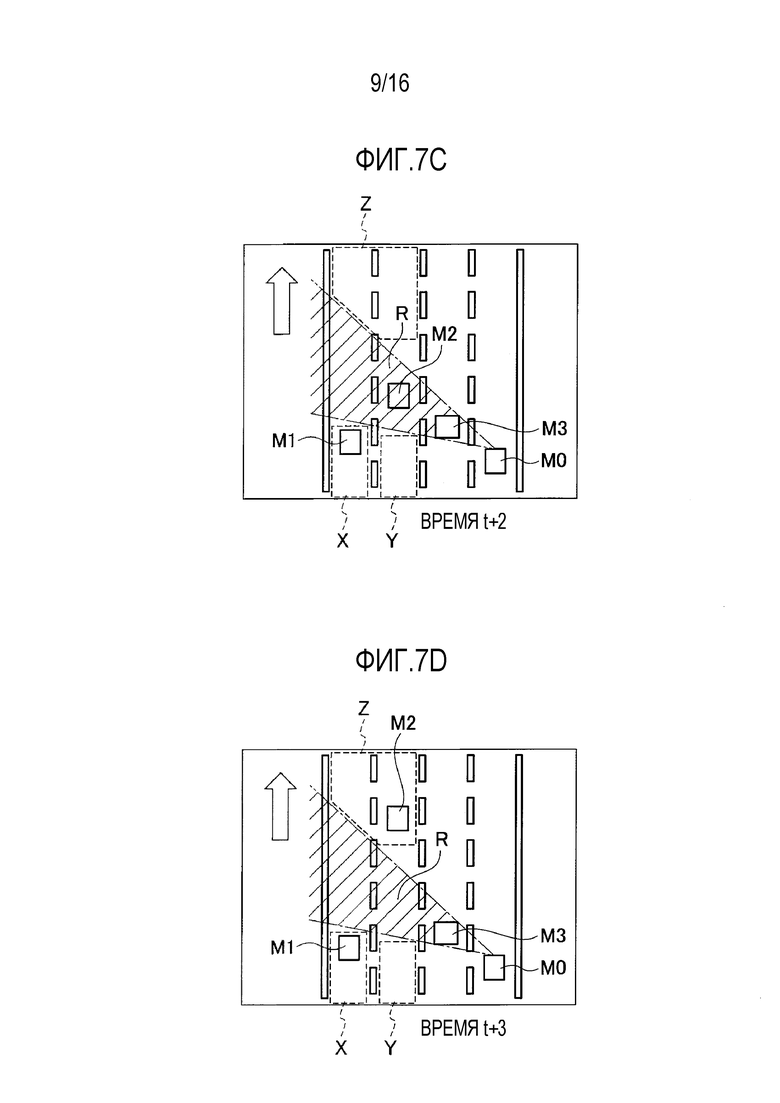
Фиг. 7C является еще одной другой схемой для пояснения того, как определять идентификационную информацию относительно объекта во втором варианте осуществления настоящего изобретения.
Фиг. 7D является еще одной другой схемой для пояснения того, как определять идентификационную информацию относительно объекта во втором варианте осуществления настоящего изобретения.
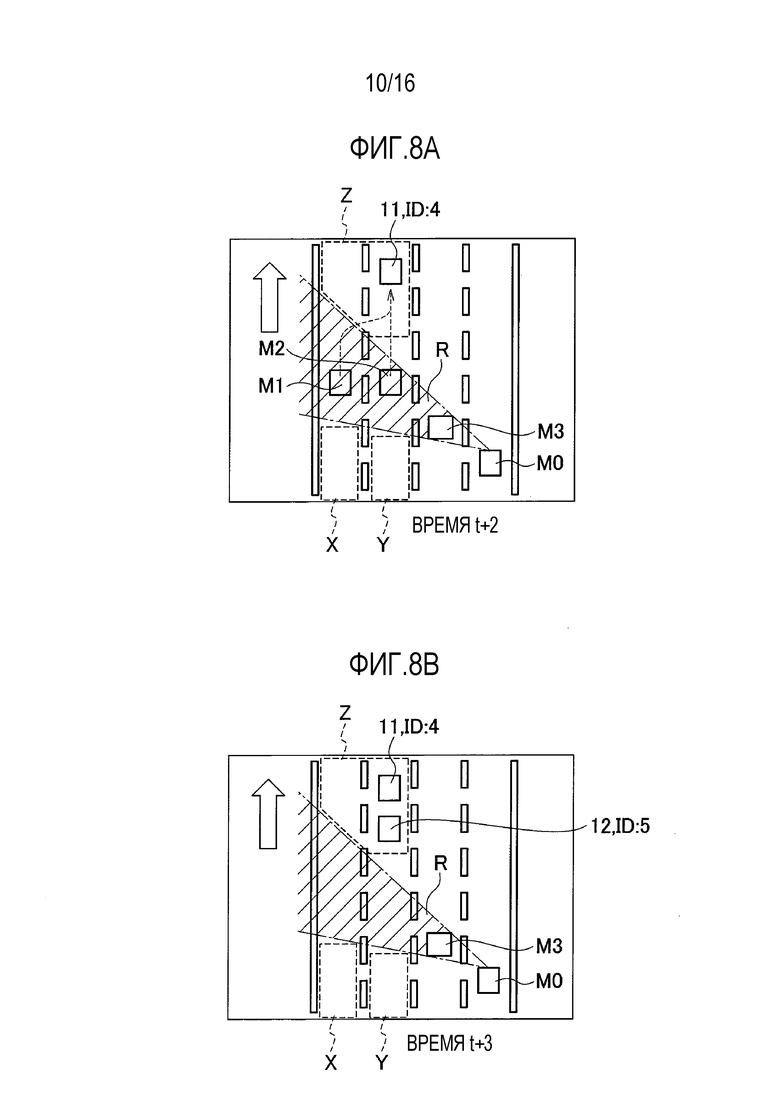
Фиг. 8A является схемой для пояснения того, как определять идентификационную информацию относительно объекта во втором варианте осуществления настоящего изобретения.
Фиг. 8B является другой схемой для пояснения того, как определять идентификационную информацию относительно объекта во втором варианте осуществления настоящего изобретения.
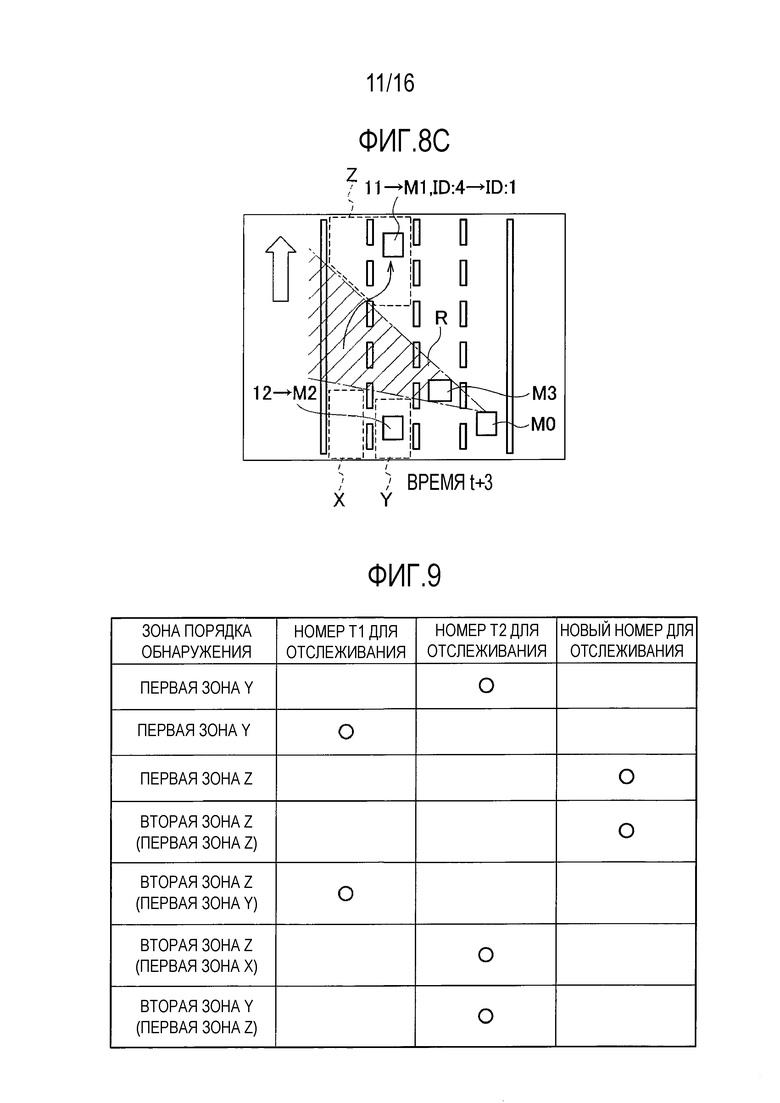
Фиг. 8C является еще одной другой схемой для пояснения того, как определять идентификационную информацию относительно объекта во втором варианте осуществления настоящего изобретения.
Фиг. 9 является схемой для пояснения номера для отслеживания объекта, который выходит из скрытой области во втором варианте осуществления настоящего изобретения.
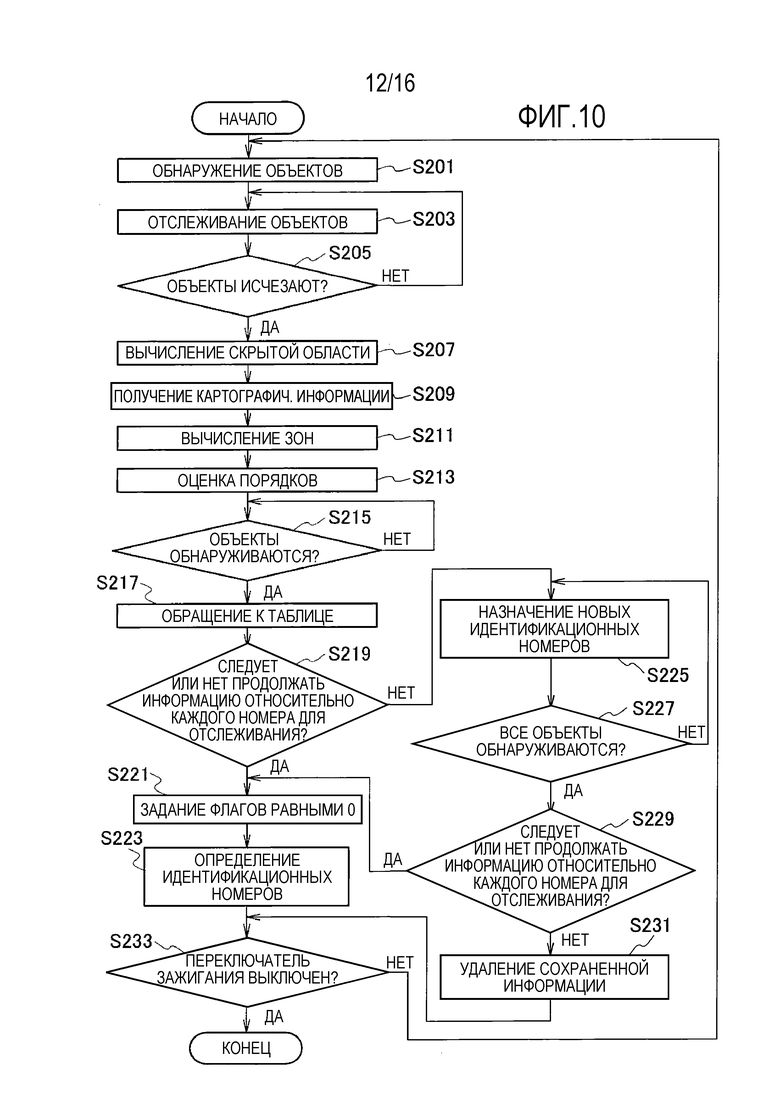
Фиг. 10 является блок-схемой последовательности операций способа для пояснения примера того, как работает устройство отслеживания объектов согласно второму варианту осуществления настоящего изобретения.
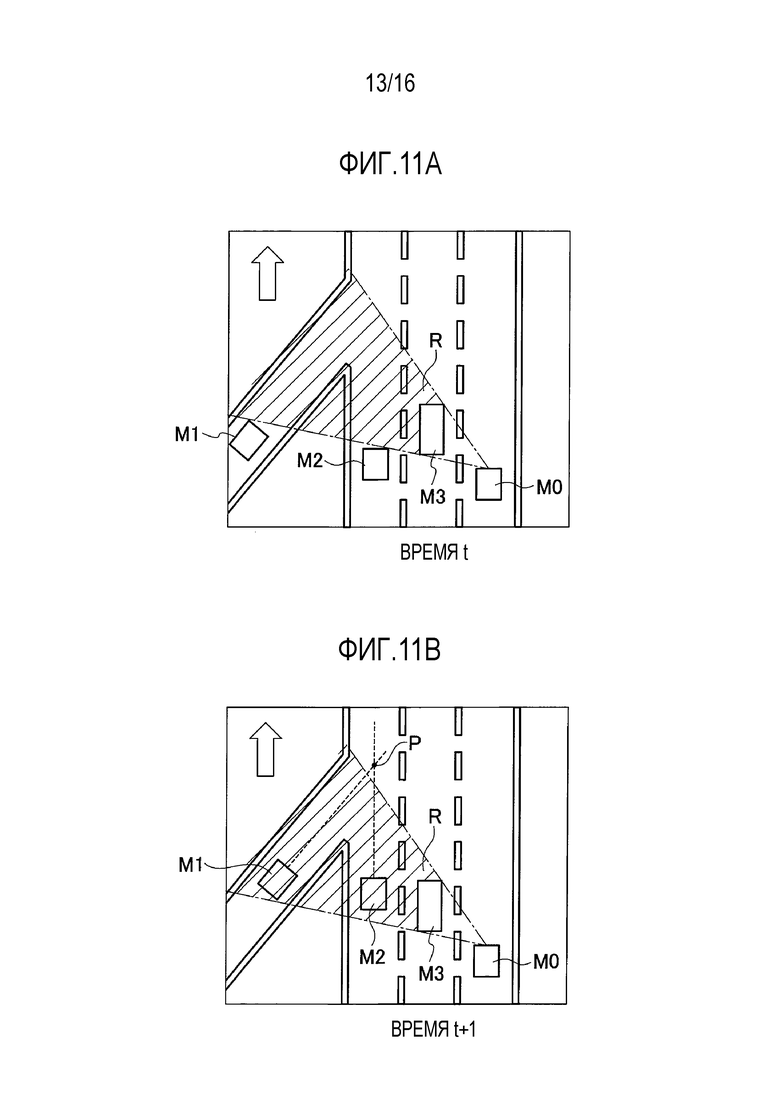
Фиг. 11A является схемой для пояснения того, как определять идентификационную информацию относительно объекта в третьем варианте осуществления настоящего изобретения.
Фиг. 11B является другой схемой для пояснения того, как определять идентификационную информацию относительно объекта в третьем варианте осуществления настоящего изобретения.
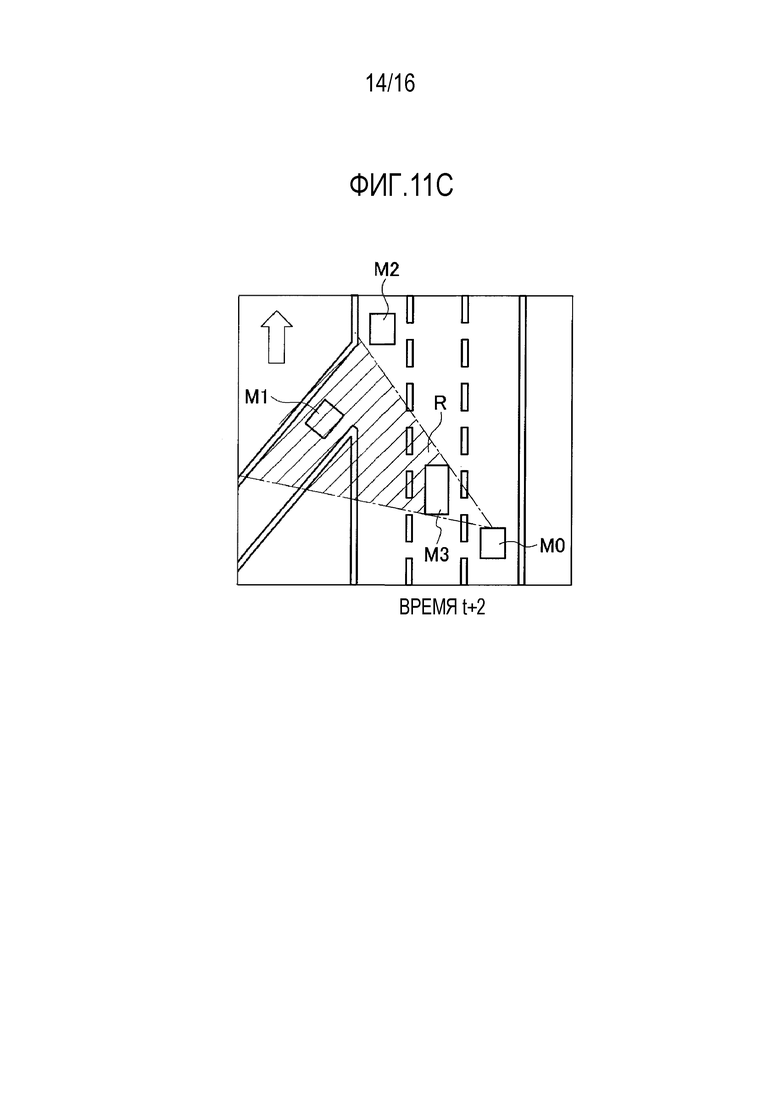
Фиг. 11C является еще одной другой схемой для пояснения того, как определять идентификационную информацию относительно объекта в третьем варианте осуществления настоящего изобретения.
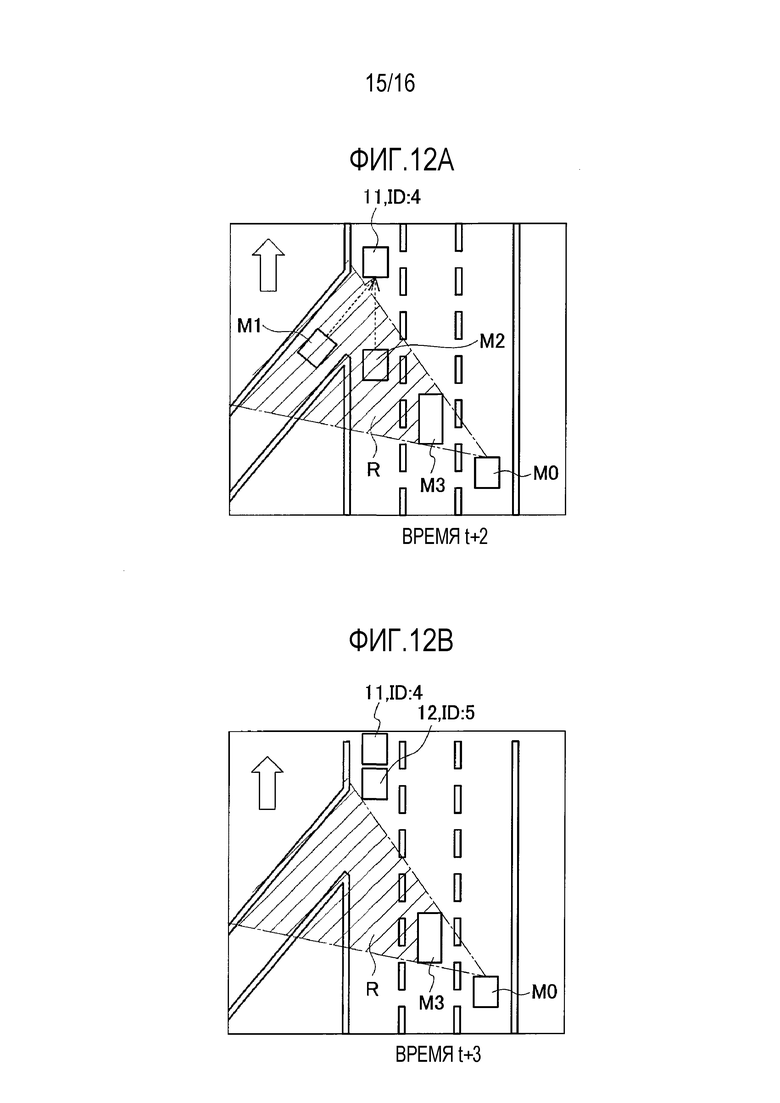
Фиг. 12A является схемой для пояснения того, как определять идентификационную информацию относительно объекта в третьем варианте осуществления настоящего изобретения.
Фиг. 12B является другой схемой для пояснения того, как определять идентификационную информацию относительно объекта в третьем варианте осуществления настоящего изобретения.
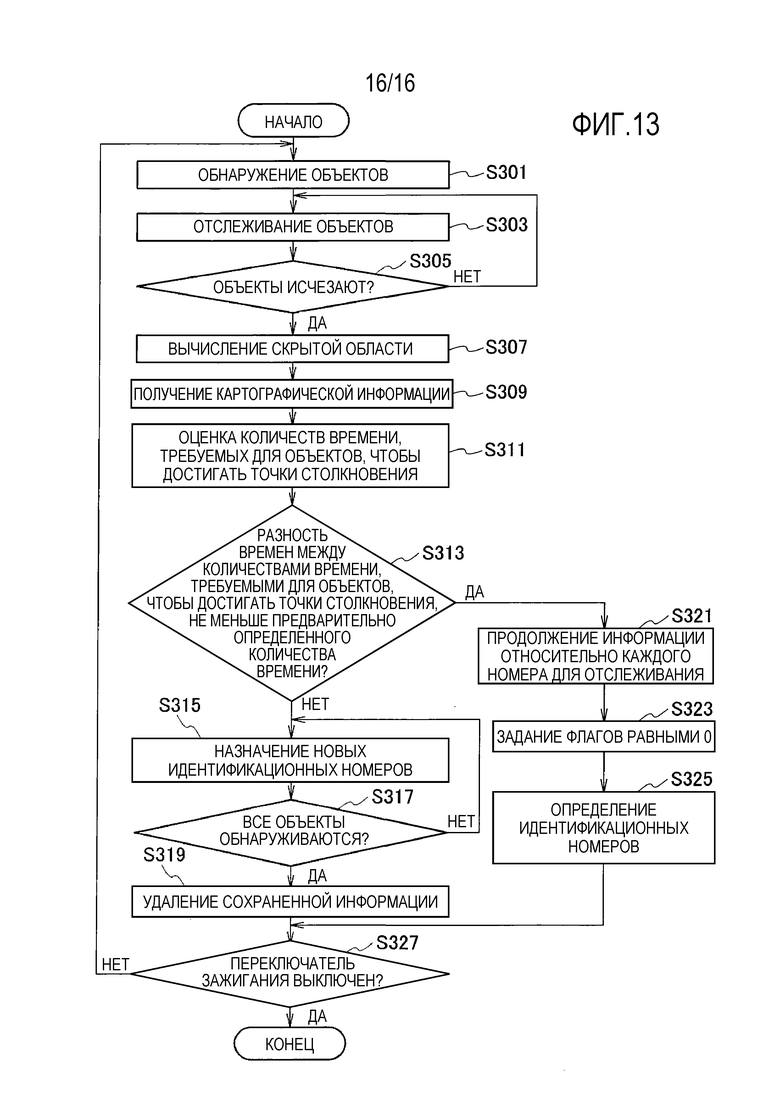
Фиг. 13 является блок-схемой последовательности операций способа для пояснения примера того, как работает устройство отслеживания объектов согласно третьему варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] Со ссылкой на чертежи, ниже предоставляется описание вариантов осуществления настоящего изобретения. Идентичные компоненты обозначаются посредством идентичных ссылок с номерами на всех чертежах, и описание опускается.
[0010] Первый вариант осуществления
Со ссылкой на фиг. 1, приводится описание для устройства 100 отслеживания объектов согласно первому варианту осуществления. Как проиллюстрировано на фиг. 1, устройство 100 отслеживания объектов включает в себя датчик 10 объектов, модуль 20 получения картографической информации и контроллер 30.
[0011] Датчик 10 объектов представляет собой датчик для периодического обнаружения объектов около движущегося тела (транспортного средства) и, например, представляет собой лазерный дальномер. Лазерный дальномер обнаруживает объекты (пешеходов, велосипеды, мотоциклы, другие транспортные средства), которые находятся около (например, в пределах 30 м от) рассматриваемого транспортного средства, в качестве движущегося тела. Более конкретно, лазерный дальномер сканирует лазерный луч в пределах определенного диапазона углов и принимает отраженный лазерный луч, чтобы обнаруживать разность времен между временем испускания лазерного луча и временем приема отраженного лазерного луча. В силу этого, лазерный дальномер определяет расстояние и скорость каждого объекта относительно рассматриваемого транспортного средства, а также направление, в котором перемещается объект. Датчик 10 объектов выводит информацию относительно обнаруженных объектов в контроллер 30. В этой связи, инфракрасный датчик, ультразвуковой датчик, камера и т.п. может использоваться в качестве датчика 10 объектов. Датчик 10 объектов выводит результат обнаружения в контроллер 30.
[0012] Модуль 20 получения картографической информации представляет собой устройство для получения картографической информации и, например, представляет собой навигационную систему. Картографическая информация представляет собой информацию, например, относительно числа полос движения на проезжей части, точек пересечения дорог, правил дорожного движения и т.п. Модуль 20 получения картографической информации выводит полученную картографическую информацию в контроллер 30. В этой связи, модуль 20 получения картографической информации может быть выполнен с возможностью получать картографическую информацию с носителя записи или от сервера.
[0013] Контроллер 30 представляет собой схему для обработки данных, полученных из датчика 10 объектов и модуля 20 получения картографической информации, и формируется, например, из IC, LSI и т.п. С функциональной точки зрения, контроллер 30 может разделяться на модуль 31 отслеживания объектов, модуль 32 вычисления скрытых областей, модуль 33 оценки позиционной взаимосвязи, модуль 34 вычисления маршрутов и модуль 35 назначения идентификационных номеров.
[0014] Модуль 31 отслеживания объектов отслеживает объект посредством ассоциирования параметров объекта, обнаруженного в данный момент, и параметров объекта, обнаруженного ранее. Параметры объекта представляют позицию объекта, скорость объекта, размер объекта, направление, в котором перемещается объект, цвет объекта и т.п. В случае если параметры объекта, обнаруженного ранее, не могут быть ассоциированы с параметрами объекта, обнаруженного в данный момент, модуль 31 отслеживания объектов определяет то, что ранее обнаруженный объект исчезает. Кроме того, в случае если объект исчезает из диапазона обнаружения датчика, модуль 31 отслеживания объектов определяет то, что объект входит в скрытую область.
[0015] Модуль 32 вычисления скрытых областей вычисляет скрытую область. Скрытая область представляет собой область, в которой объект скрывается позади помехи и, соответственно, не может обнаруживаться посредством датчика 10 объектов. Ниже предоставляется подробное описание для скрытой области.
[0016] В случае если модуль 31 отслеживания объектов определяет то, что несколько объектов исчезают, модуль 33 оценки позиционной взаимосвязи оценивает позиционную взаимосвязь между скрытыми несколькими объектами посредством использования параметров нескольких объектов, которые получаются перед исчезновением нескольких объектов.
[0017] На основе картографической информации, полученной из модуля 20 получения картографической информации, модуль 34 вычисления маршрутов вычисляет полосы движения и маршруты, на которые скрытые объекты могут изменять свои курсы.
[0018] Модуль 35 назначения идентификационных номеров назначает идентификационный номер каждому объекту, обнаруженному посредством датчика 10 объектов. Кроме того, модуль 35 назначения идентификационных номеров непрерывно назначает идентичный идентификационный номер каждому объекту, текущие и предыдущие параметры которого ассоциированы друг с другом посредством модуля 31 отслеживания объектов, и назначает новый идентификационный номер каждому новому обнаруженному объекту. Кроме того, на основе позиционной взаимосвязи между несколькими объектами, которая получается из модуля 33 оценки позиционной взаимосвязи, а также маршрутов и т.п., на которые несколько объектов могут изменять свои курсы и которые получаются из модуля 34 вычисления маршрутов, модуль 35 назначения идентификационных номеров назначает идентификационный номер каждому объекту, который выходит из скрытой области.
[0019] Далее, со ссылкой на фиг. 2A-2C, приводится описание для того, как осуществляется способ отслеживания объектов, и для того, как выполняется какой процесс, в случае, если объект исчезает. Как проиллюстрировано на фиг. 2A, в случае если датчик 10 объектов обнаруживает объекты 11-13 во время t, модуль 31 отслеживания объектов задает номера T1-T3 для отслеживания для объектов 11-13. Номер для отслеживания представляет собой информацию относительно позиции и скорости соответствующего объекта. Кроме того, модуль 35 назначения идентификационных номеров назначает идентификационные номера ID1-ID3 объектам 11-13. В этой связи, в первом варианте осуществления, номер для отслеживания и идентификационный номер включены в идентификационную информацию, которая должна использоваться для того, чтобы отслеживать соответствующий объект.
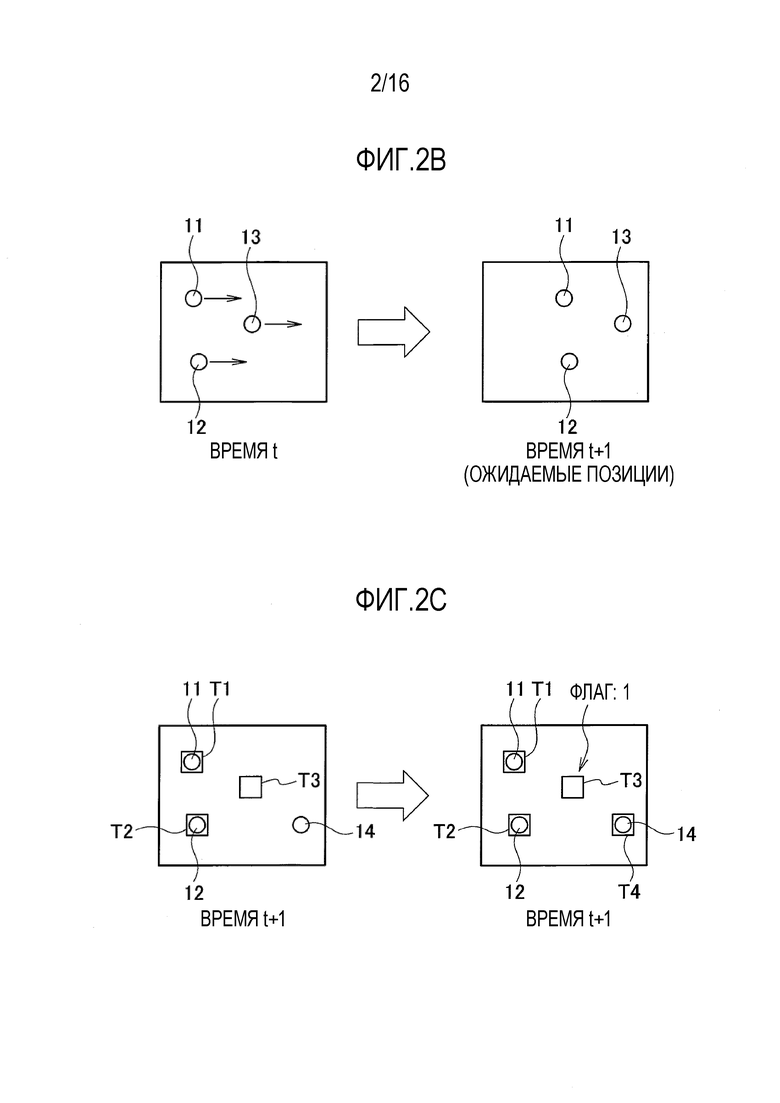
[0020] После этого, как проиллюстрировано на фиг. 2B, на основе информации позиции и информации скорости относительно каждого из объектов 11-13, модуль 31 отслеживания объектов оценивает позиции, в которых соответствующие объекты 11-13 предположительно должны находиться во время t+1. После этого, как проиллюстрировано на фиг. 2C, на основе оцененных позиций, модуль 31 отслеживания объектов перемещает номера T1-T3 для отслеживания. После этого, модуль 31 отслеживания объектов сопоставляет информацию относительно объекта 11, обнаруженного во время t+1, информацию относительно объекта 12, обнаруженного во время t+1, и информацию относительно объекта 14, обнаруженного во время t+1, с номерами T1-T3 для отслеживания, которые перемещаются во время t. Модуль 31 отслеживания объектов задает новый номер T4 для отслеживания для объекта 14, номер для отслеживания которого не может находиться в пределах определенного расстояния (например, 6 м) от объекта 14. Напротив, модуль 31 отслеживания объектов изменяет флаг номера T3 для отслеживания с 0 на 1, поскольку объект, соответствующий номеру T3 для отслеживания, в данный момент не существует в пределах определенного расстояния от номера T3 для отслеживания, хотя и существует более чем определенное число раз в предыдущее время. Модуль 31 отслеживания объектов продолжает оценку позиции объекта, соответствующего номеру T3 для отслеживания, с использованием информации позиции и информации скорости, которую имеет номер T3 для отслеживания. В первом варианте осуществления, предусмотрено два типа флага, который задается для номера для отслеживания: 0 и 1. Флаг 1 означает то, что соответствующий объект не существует в пределах определенного расстояния от номера для отслеживания. Флаг 0 означает то, что соответствующий объект существует в пределах определенного расстояния от номера для отслеживания. В примере, проиллюстрированном на фиг. 2C, флаги соответствующих номеров T1, T2 для отслеживания задаются равными 0.
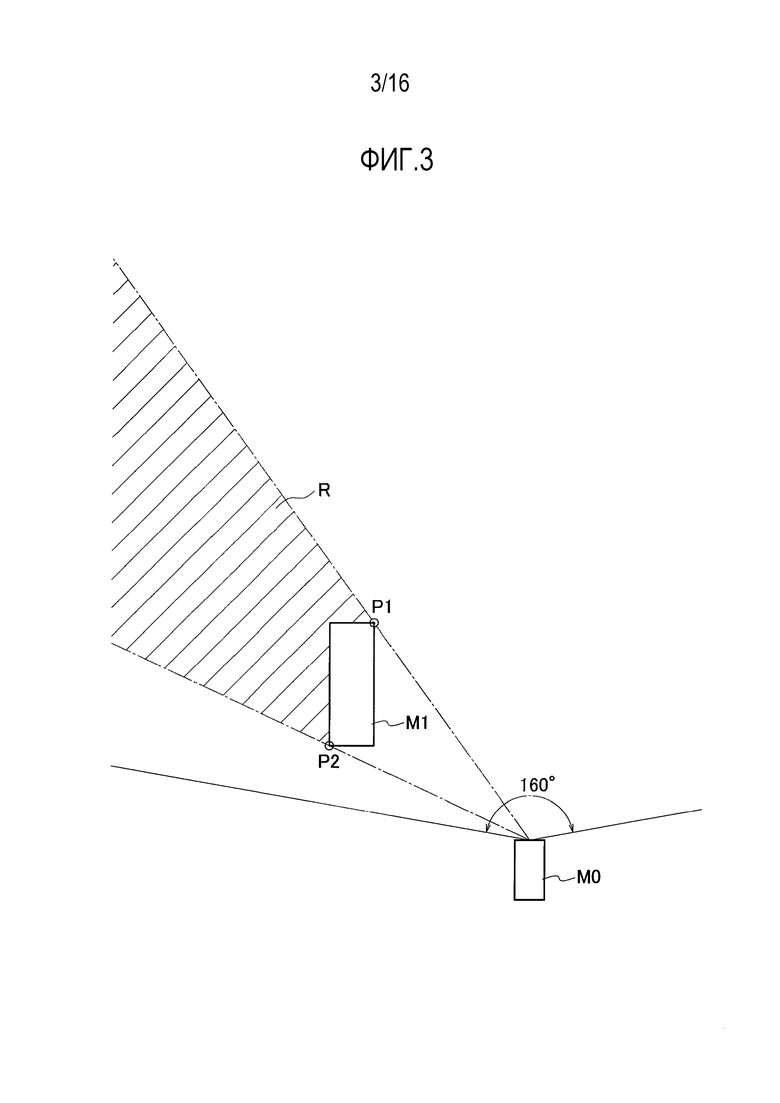
[0021] Далее, со ссылкой на фиг. 3, приводится описание для скрытой области. В первом варианте осуществления, как проиллюстрировано на фиг. 3, диапазон обнаружения датчика 10 объектов составляет 160° впереди рассматриваемого транспортного средства. В этой связи, это представляет собой один пример диапазона обнаружения, и диапазон обнаружения расширяется, когда датчик монтируется в боковой части транспортного средства или в задней части транспортного средства. В пределах диапазона обнаружения, проиллюстрированного на фиг. 3, модуль 32 вычисления скрытых областей вычисляет скрытую область R. Более конкретно, в случае если датчик 10 объектов обнаруживает другое транспортное средство M1 спереди слева относительно рассматриваемого транспортного средства M0, модуль 32 вычисления скрытых областей вычисляет скрытую область R, которая представляет собой область, скрытую позади другого транспортного средства M1, внутри области, сформированной посредством прямых линий, идущих из рассматриваемого транспортного средства M0 и проходящих через угловые участки P1, P2 другого транспортного средства M1. В этой связи, угловые участки P1, P2 другого транспортного средства M1 представляют собой две точки, которые являются самыми дальними от рассматриваемого транспортного средства M0, из числа участков другого транспортного средства M1.
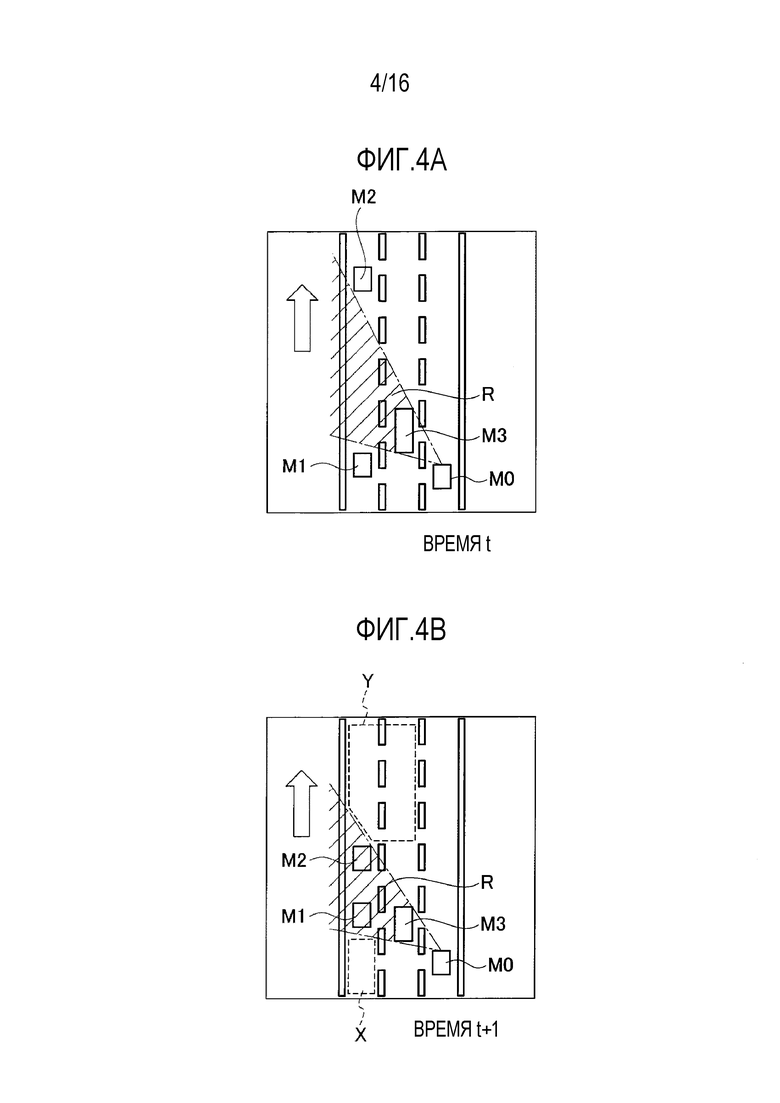
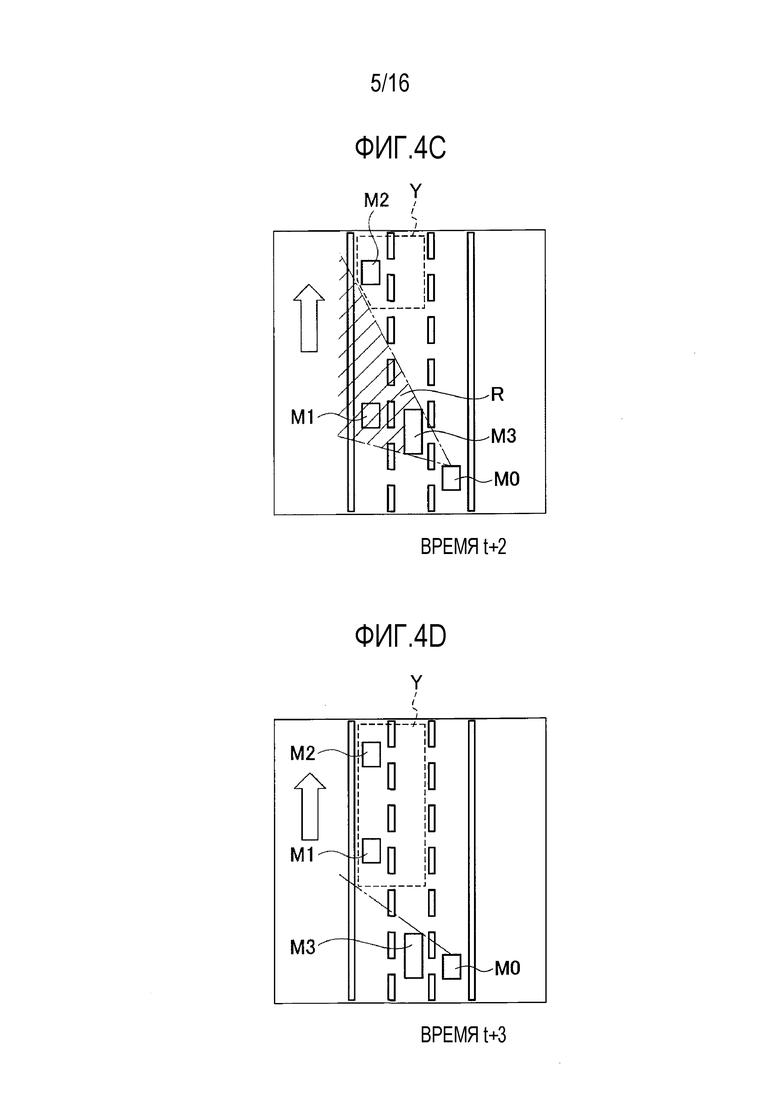
[0022] Далее, со ссылкой на фиг. 4A-4D и фиг. 5, приводится описание для того, как определять идентификационную информацию относительно каждого из нескольких объектов в случае, если несколько объектов входят в скрытую область R. Стрелка на фиг. 4A-4D представляет направление, в котором движутся транспортные средства.
[0023] Как проиллюстрировано на фиг. 4A, во время t, модуль 31 отслеживания объектов задает номера T1-T3 для отслеживания для других транспортных средств M1-M3, присутствующих около рассматриваемого транспортного средства M0. Между тем, модуль 35 назначения идентификационных номеров назначает идентификационные номера ID1-ID3 другим транспортным средствам M1-M3. Кроме того, модуль 32 вычисления скрытых областей вычисляет скрытую область R, которая скрывается позади другого транспортного средства M3. В этой связи, иллюстрации номеров T1-T3 для отслеживания опускаются из фиг. 4A, а также из фиг. 4B в 4D.
[0024] После этого, как проиллюстрировано на фиг. 4B, во время t+1, другие транспортные средства M1, M2 входят в скрытую область R, и модуль 31 отслеживания объектов становится неспособным отслеживать другие транспортные средства M1, M2. В этом случае, модуль 31 отслеживания объектов задает флаги номера T1, T2 для отслеживания, заданного для других транспортных средств M1, M2, равными 1. После этого, на основе картографической информации, модуль 34 вычисления маршрутов вычисляет зоны, в которые другие транспортные средства M1, M2 могут выходить из скрытой области R. В примере, проиллюстрированном на фиг. 4B, зоны, в которые другие транспортные средства M1, M2 могут выходить из скрытой области R, представляют собой зоны X, Y.
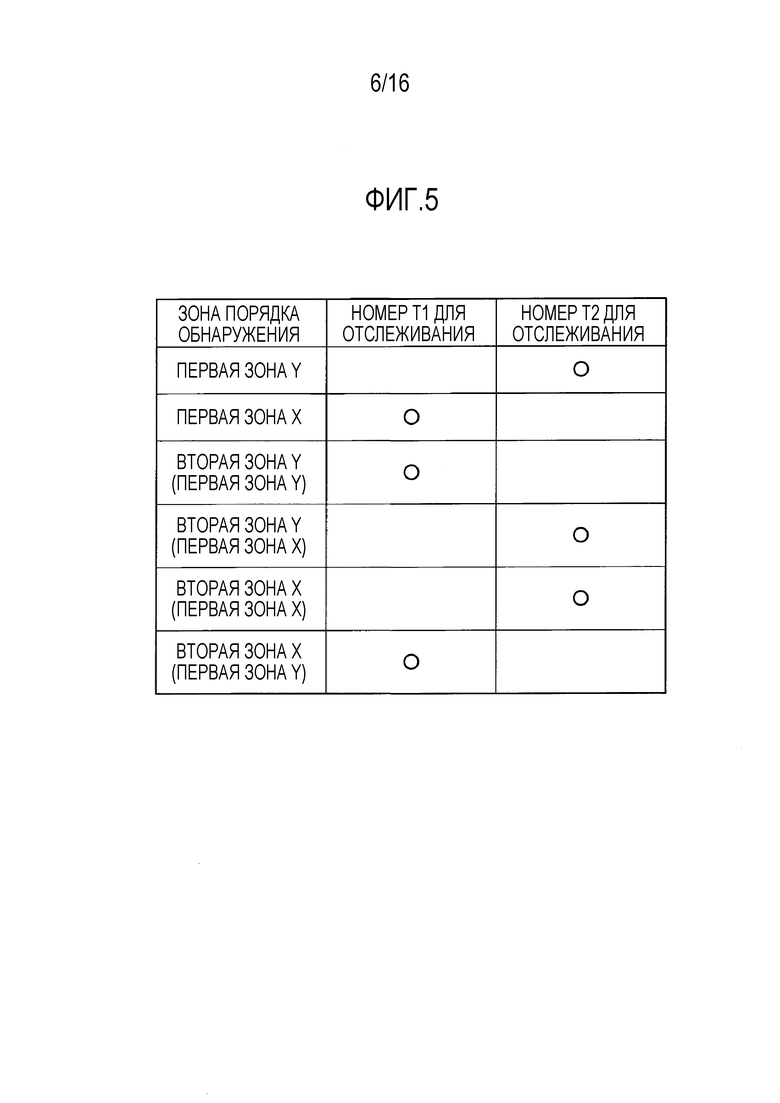
[0025] После этого, модуль 33 оценки позиционной взаимосвязи оценивает позиционную взаимосвязь между другими транспортными средствами M1, M2 в скрытой области R. В первом варианте осуществления, позиционная взаимосвязь между несколькими объектами в скрытой области R включает в себя не только позиционную взаимосвязь в скрытой области R, но также и порядки, в которых несколько объектов выходят из скрытой области R. В примере, проиллюстрированном на фиг. 4B, позиционная взаимосвязь между другими транспортными средствами M1, M2 указывает то, что другое транспортное средство M2 существует впереди другого транспортного средства M1. Модуль 33 оценки позиционной взаимосвязи допускает оценку позиционной взаимосвязи между другими транспортными средствами M1, M2, проиллюстрированными на фиг. 4B, из позиционной взаимосвязи между другими транспортными средствами M1, M2 во время t. После этого, модуль 33 оценки позиционной взаимосвязи оценивает порядки, в которых другие транспортные средства M1, M2 могут выходить из скрытой области R в зоны X, Y. Порядок, в котором транспортные средства M1, M2 могут выходить из скрытой области R в зону X, оценивается как "транспортное средство M1 до транспортного средства M2". Напротив, порядок, в котором транспортные средства M1, M2 могут выходить из скрытой области R в зону Y, оценивается как "транспортное средство M2 до транспортного средства M1". Модуль 33 оценки позиционной взаимосвязи составляет таблицу, проиллюстрированную на фиг. 5, на основе оцененных порядков. В таблице, проиллюстрированной на фиг. 5, первая зона Y указывает то, что первый номер для отслеживания, который может выходить из зоны Y, представляет собой номер T2 для отслеживания. Помимо этого, вторая зона Y (первая зона Y) указывает то, что второй номер для отслеживания, который может выходить из зоны Y после обнаружения выезда первого объекта из зоны Y, представляет собой номер T1 для отслеживания.
[0026] Далее, датчик 10 объектов обнаруживает объект, который выходит из скрытой области R. Как проиллюстрировано на фиг. 4C, в случае если во время t+2, другое транспортное средство M2 выходит из скрытой области R в зону Y первым, модуль 31 отслеживания объектов обращается к таблице, проиллюстрированной на фиг. 5, и продолжает ассоциирование информации относительно номера T2 для отслеживания с другим транспортным средством M2. Помимо этого, модуль 31 отслеживания объектов задает флаг номера T2 для отслеживания равным 0. Кроме того, модуль 35 назначения идентификационных номеров продолжает назначение идентификационного номера ID2 другому транспортному средству M2.
[0027] После этого, как проиллюстрировано на фиг. 4D, в случае если во время t+3, другое транспортное средство M1 выходит из скрытой области R в зону Y вторым, модуль 31 отслеживания объектов обращается к таблице, проиллюстрированной на фиг. 5, и продолжает ассоциирование информации относительно первого номера T1 для отслеживания с другим транспортным средством M1. Помимо этого, модуль 31 отслеживания объектов задает флаг номера T1 для отслеживания равным 0. Кроме того, модуль 35 назначения идентификационных номеров продолжает назначение идентификационного номера ID1 другому транспортному средству M1.
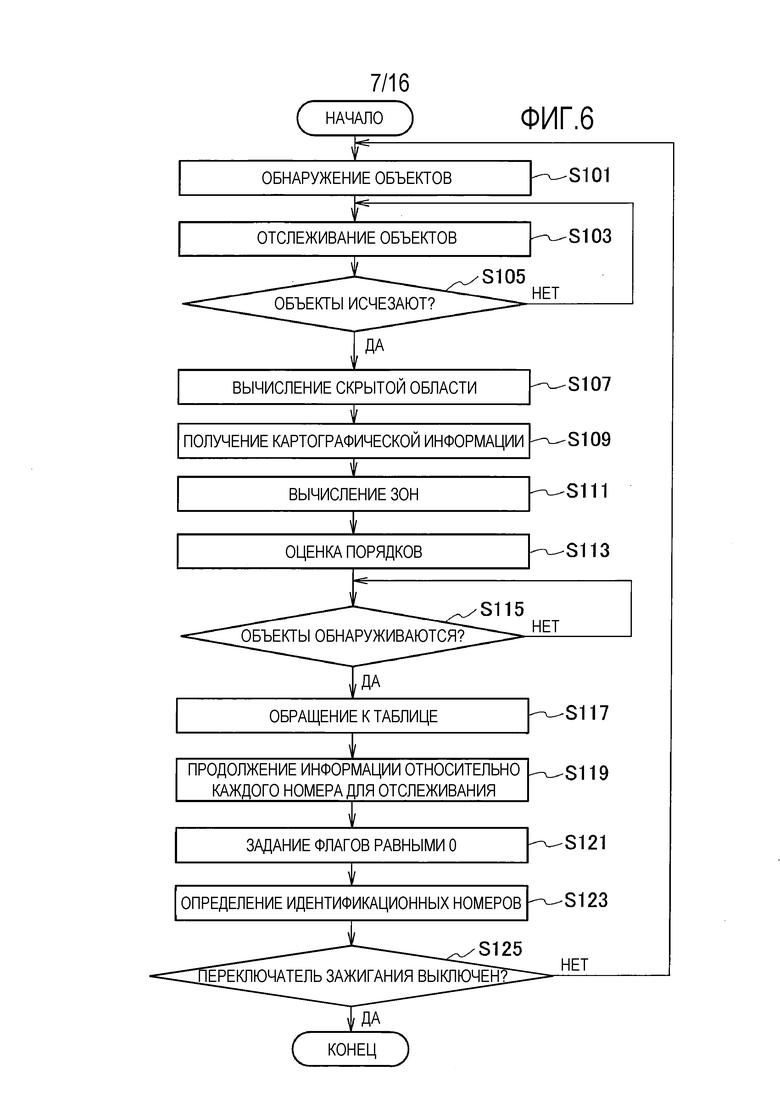
[0028] Далее, со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 6, приводится описание для примера того, как работает устройство 100 отслеживания объектов согласно первому варианту осуществления. Эта блок-схема последовательности операций способа начинается, когда переключатель зажигания включается.
[0029] На этапе S101, датчик 10 объектов обнаруживает объекты около рассматриваемого транспортного средства.
[0030] На этапе S103, модуль 31 отслеживания объектов задает номера для отслеживания равным соответствующим объектам и начинает отслеживать объекты. Между тем, модуль 35 назначения идентификационных номеров назначает идентификационные номера соответствующим объектам.
[0031] На этапе S105, модуль 31 отслеживания объектов определяет то, исчезают или нет несколько объектов. В случае если несколько объектов исчезают (если "Да" на этапе S105), процесс переходит к этапу S107. С другой стороны, в случае если несколько объектов не исчезают (если "Нет" на этапе S105), процесс возвращается к этапу S103. Кроме того, в случае если модуль 31 отслеживания объектов определяет то, что несколько объектов исчезают, модуль 31 отслеживания объектов задает флаги нескольких объектов равными 1.
[0032] На этапе S107, модуль 32 вычисления скрытых областей вычисляет скрытую область.
[0033] На этапе S109, модуль 20 получения картографической информации получает картографическую информацию.
[0034] На этапе S111, на основе картографической информации, модуль 34 вычисления маршрутов вычисляет зоны, в которые объекты могут выходить из скрытой области.
[0035] На этапе S113, модуль 33 оценки позиционной взаимосвязи оценивает позиционную взаимосвязь между несколькими объектами в скрытой области. Кроме того, на основе оцененной позиционной взаимосвязи, модуль 33 оценки позиционной взаимосвязи оценивает порядки, в которых несколько объектов могут выходить из скрытой области в зоны.
[0036] На этапе S115, в случае если датчик 10 объектов обнаруживает объекты, которые выходят из скрытой области (если "Да" на этапе S115), процесс переходит к этапу S117. С другой стороны, в случае если датчик 10 объектов не обнаруживает таких объектов (если "Нет" на этапе S115), процесс ожидает обнаружение объектов, которые выходят из скрытой области, посредством датчика 10 объектов.
[0037] На этапе S117, модуль 31 отслеживания объектов обращается к таблице созданный посредством модуля 33 оценки позиционной взаимосвязи.
[0038] На этапе S119, на основе результата обращения к таблице, модуль 31 отслеживания объектов продолжает ассоциирование информации относительно каждого номера для отслеживания с соответствующим объектом.
[0039] На этапе S121, модуль 31 отслеживания объектов задает флаги продолжающихся номеров для отслеживания равными 0.
[0040] На этапе S123, модуль 35 назначения идентификационных номеров определяет идентификационные номера, которые должны назначаться объектам.
[0041] На этапе S125, устройство 100 отслеживания объектов определяет то, выключен или нет переключатель зажигания. В случае если переключатель зажигания включен (если "Нет" на этапе S125), процесс возвращается к этапу S101. В случае если переключатель зажигания выключен (если "Да" на этапе S125), устройство 100 отслеживания объектов завершает последовательность процесса.
[0042] Как пояснено выше, следующая работа и преимущества могут получаться из устройства 100 отслеживания объектов согласно первому варианту осуществления.
[0043] В случае если несколько объектов входят в скрытую область, устройство 100 отслеживания объектов оценивает позиционную взаимосвязь между несколькими объектами в скрытой области. Когда объекты выходят из скрытой области, устройство 100 отслеживания объектов определяет идентификационную информацию относительно каждого объекта на основе оцененной позиционной взаимосвязи. В силу этого, даже в случае, если несколько объектов входят в скрытую область и временно исчезают, устройство 100 отслеживания объектов допускает предотвращение назначения каждому объекту неправильной идентификационной информации, отличающейся от информации, которая назначается объекту до того, как объект скрывается, и может улучшать рабочие характеристики отслеживания объектов.
[0044] Кроме того, в случае если устройство 100 отслеживания объектов может оценивать позиционную взаимосвязь между несколькими объектами в скрытой области, устройство 100 отслеживания объектов продолжает ассоциирование идентификационной информации, назначаемой каждому объекту, с объектом, когда объект выходит из скрытой области. В силу этого, даже в случае, если несколько объектов входят в скрытую область и временно исчезают, устройство 100 отслеживания объектов допускает предотвращение назначения каждому объекту неправильной идентификационной информации, отличающейся от информации, которая назначается объекту до того, как объект скрывается, и может улучшать рабочие характеристики отслеживания объектов.
Второй вариант осуществления
[0045] Далее приводится описание для второго варианта осуществления настоящего изобретения. Устройство 100 отслеживания объектов согласно второму варианту осуществления имеет конфигурацию, идентичную конфигурации устройства 100 отслеживания объектов согласно первому варианту осуществления. Второй вариант осуществления отличается от первого варианта осуществления с точки зрения позиционной взаимосвязи между несколькими объектами. Выше пояснен первый вариант осуществления, в котором модуль 33 оценки позиционной взаимосвязи может оценивать позиционную взаимосвязь между несколькими объектами в скрытой области. С другой стороны, в дальнейшем поясняется второй вариант осуществления, в котором модуль 33 оценки позиционной взаимосвязи не может оценивать позиционную взаимосвязь между несколькими объектами в скрытой области.
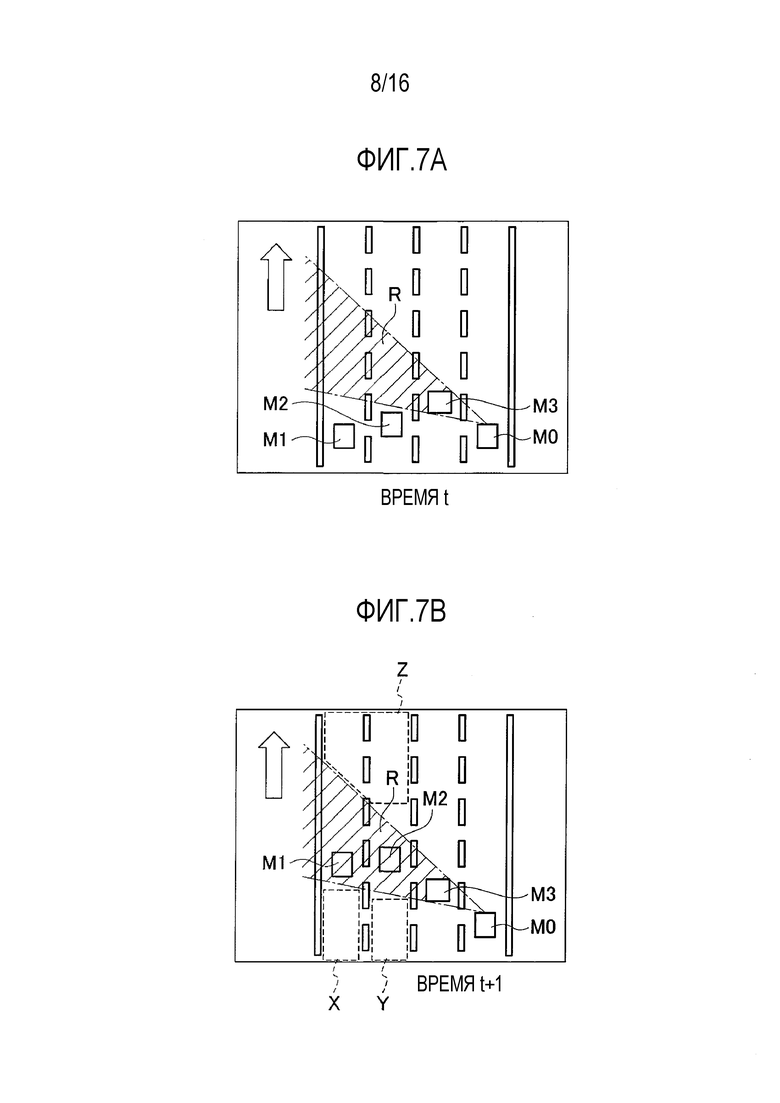
[0046] Как проиллюстрировано на фиг. 7A, во время t, модуль 31 отслеживания объектов задает номера T1-T3 для отслеживания для других транспортных средств M1-M3, присутствующих около рассматриваемого транспортного средства M0. Между тем, модуль 35 назначения идентификационных номеров назначает идентификационные номера ID1-ID3 другим транспортным средствам M1-M3.
[0047] После этого, как проиллюстрировано на фиг. 7B, в случае если во время t+1, другие транспортные средства M1, M2 входят в скрытую область R, и модуль 31 отслеживания объектов становится неспособным отслеживать другие транспортные средства M1, M2, модуль 31 отслеживания объектов задает флаги номеров T1, T2 для отслеживания, заданных для других транспортных средств M1, M2, равными 1. После этого, модуль 34 вычисления маршрутов вычисляет зоны X, Y, Z, в которые другие транспортные средства M1, M2 могут выходить из скрытой области R, на основе картографической информации.
[0048] После этого, модуль 33 оценки позиционной взаимосвязи оценивает позиционную взаимосвязь между другими транспортными средствами M1, M2 в скрытой области R. Модуль 33 оценки позиционной взаимосвязи оценивает то, какое другое транспортное средство может выходить из скрытой области R в зоны X, Y, Z, и порядок, в котором другие транспортные средства M1, M2 могут выходить из скрытой области R в зону Z. Транспортное средство, которое может выходить из скрытой области R в зону X, представляет собой другое транспортное средство M1. Между тем, транспортное средство, которое может выходить из скрытой области R в зону Y, представляет собой другое транспортное средство M2. Тем не менее, в случае, проиллюстрированном на фиг. 7B, модуль 33 оценки позиционной взаимосвязи не может оценивать порядок, в котором другие транспортные средства M1, M2 могут выходить из скрытой области R в зону Z. Причина этого заключается в том, что другое транспортное средство M1 или другое транспортное средство M2 может выходить из скрытой области R в зону Z после смены полосы движения. Модуль 33 оценки позиционной взаимосвязи составляет таблицу, проиллюстрированную на фиг. 9, на основе оцененной позиционной взаимосвязи.
[0049] После этого, датчик 10 объектов обнаруживает объект, который выходит из скрытой области R. Как проиллюстрировано на фиг. 7C, в случае если во время t+2, другое транспортное средство M1 выходит из скрытой области R в зону X первым, модуль 31 отслеживания объектов обращается к таблице, проиллюстрированной на фиг. 9, продолжает ассоциирование информации относительно номера T1 для отслеживания с другим транспортным средством M1 и задает флаг номера T1 для отслеживания равным 0. Между тем, модуль 35 назначения идентификационных номеров продолжает назначение идентификационного номера ID1 другому транспортному средству M1.
[0050] После этого, как проиллюстрировано на фиг. 7D, в случае если во время t+3, другое транспортное средство M2 выходит из скрытой области R в зону Z вторым, модуль 31 отслеживания объектов обращается к таблице, проиллюстрированной на фиг. 9, продолжает ассоциирование информации относительно номера T2 для отслеживания с другим транспортным средством M2 и задает флаг номера T2 для отслеживания равным 0. Между тем, модуль 35 назначения идентификационных номеров продолжает назначение идентификационного номера ID2 другому транспортному средству M2.
[0051] С другой стороны, как проиллюстрировано на фиг. 8A, в случае если во время t+2, датчик 10 объектов обнаруживает объект 11, который выходит из скрытой области R в зону Z первым, модуль 31 отслеживания объектов не может определять то, представляет собой объект 11 другое транспортное средство M1 или другое транспортное средство M2. По этой причине, модуль 31 отслеживания объектов обращается к таблице, проиллюстрированной на фиг. 9, и задает новый номер T4 для отслеживания для объекта 11. Между тем, модуль 35 назначения идентификационных номеров назначает новый идентификационный номер ID4 объекту 11. В этом случае, модуль 31 отслеживания объектов сохраняет, но не удаляет, информацию относительно номера T1 для отслеживания и информацию относительно номера T2 для отслеживания.
[0052] После этого, как проиллюстрировано на фиг. 8B, в случае если во время t+3, датчик 10 объектов обнаруживает объект 12, который выходит из скрытой области R в зону Z вторым, модуль 31 отслеживания объектов не может определять то, представляет сбой объект 12 другое транспортное средство M1 или другое транспортное средство M2. По этой причине, модуль 31 отслеживания объектов обращается к таблице, проиллюстрированной на фиг. 9, и задает новый номер T5 для отслеживания для объекта 12. Между тем, модуль 35 назначения идентификационных номеров назначает новый идентификационный номер ID5 объекту 12. В этом случае, поскольку число назначенных новых идентификационных номеров просто равно числу (два) объектов, которые существуют в скрытой области R, модуль 31 отслеживания объектов определяет то, что объект не существует в скрытой области R, и удаляет информацию относительно каждого из номеров T1, T2 для отслеживания, которые модуль 31 отслеживания объектов сохраняет к настоящему моменту. Другими словами, в случае если число назначенных новых идентификационных номеров просто равно числу объектов, входящих в скрытую область R, модуль 31 отслеживания объектов удаляет информацию, которую сохраняет модуль 31 отслеживания объектов.
[0053] С другой стороны, как проиллюстрировано на фиг. 8C в случае, если во время t+3, датчик 10 объектов обнаруживает объект 12, который выходит из скрытой области R в зону Y вторым, модуль 31 отслеживания объектов может определять то, что объект 12 представляет собой другое транспортное средство M2, посредством обращения к таблице, проиллюстрированной на фиг. 9. В силу этого, модуль 31 отслеживания объектов может определять то, что объект 11 представляет собой другое транспортное средство M1. Соответственно, модуль 31 отслеживания объектов продолжает ассоциирование информации относительно номера T1 для отслеживания и информации относительно номера T2 для отслеживания с соответствующими другими транспортными средствами M1, M2 и задает флаги номеров T1, T2 для отслеживания равными 0. Между тем, модуль 35 назначения идентификационных номеров удаляет идентификационный номер ID4, который заново назначается другому транспортному средству M1 во время t+2, и непрерывно назначает идентификационный номер ID1 другому транспортному средству M1. Помимо этого, он модуль 35 назначения идентификационных номеров непрерывно назначает идентификационный номер ID2 другому транспортному средству M2.
[0054] Далее, со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 10, приводится описание для примера того, как работает устройство 100 отслеживания объектов согласно второму варианту осуществления. Эта блок-схема последовательности операций способа начинается, когда переключатель зажигания включается. В этой связи, операции на этапах S201-S217, этапах S221-S223 и этапе S233 являются идентичными операциям на этапах S101-S117, этапах S121-S123 и этапе S125 на фиг. 6, и подробное описание опускается. Приводится описание только в отношении того, что отличает блок-схему последовательности операций способа на фиг. 10 от блок-схемы последовательности операций способа на фиг. 6.
[0055] На этапе S219, модуль 31 отслеживания объектов определяет то, следует или нет продолжать информацию относительно каждого номера для отслеживания. В случае если модуль 31 отслеживания объектов может продолжать информацию относительно каждого номера для отслеживания (если "Да" на этапе S219), процесс переходит к этапу S221. С другой стороны, в случае если модуль 31 отслеживания объектов не может продолжать информацию относительно каждого номера для отслеживания (если "Нет" на этапе S219), процесс переходит к этапу S225.
[0056] На этапе S225, модуль 35 назначения идентификационных номеров назначает новый идентификационный номер объекту, который выходит из скрытой области R.
[0057] В случае если все объекты, входящие в скрытую область R, обнаруживаются на этапе S227 (если "Да" на этапе S227), процесс переходит к этапу S229. В случае если некоторые объекты, входящие в скрытую область R, не обнаруживаются (если "Нет" на этапе S227), процесс возвращается к этапу S225.
[0058] На этапе S229, модуль 31 отслеживания объектов снова определяет то, следует или нет продолжать информацию относительно каждого номера для отслеживания. В зависимости от порядка, в котором объекты выходят из скрытой области R, модуль 31 отслеживания объектов может продолжать информацию относительно каждого номера для отслеживания. В случае если модуль 31 отслеживания объектов может продолжать информацию относительно каждого номера для отслеживания (если "Да" на этапе S229), процессор переходит к этапу S221. С другой стороны, в случае если модуль 31 отслеживания объектов не может продолжать информацию относительно каждого номера для отслеживания (если "Нет" на этапе S229), процессор переходит к этапу S231.
[0059] На этапе S231, модуль 31 отслеживания объектов удаляет информацию относительно каждого номера для отслеживания, который модуль 31 отслеживания объектов сохраняет к настоящему моменту.
[0060] Как пояснено выше, следующая работа и преимущества могут получаться из устройства 100 отслеживания объектов согласно второму варианту осуществления.
[0061] В случае если устройство 100 отслеживания объектов не может оценивать позиционную взаимосвязь между несколькими объектами в скрытой области, устройство 100 отслеживания объектов назначает новую идентификационную информацию каждому объекту, когда объект выходит из скрытой области. В силу этого, даже в случае, если несколько объектов входят в скрытую область и временно исчезают, устройство 100 отслеживания объектов допускает предотвращение назначения каждому объекту неправильной идентификационной информации, отличающейся от информации, которая назначается объекту до того, как объект скрывается. Тем не менее, что касается патентного документа 1, в случае, проиллюстрированном на фиг. 8A, объект, который выходит из скрытой области R первым, представляет собой другое транспортное средство M1, но имеется вероятность того, что объект, который выходит из скрытой области R первым, определяется в качестве другого транспортного средства M2. В этом случае, определяется то, что рассматриваемое транспортное средство M0 должно иметь возможность обгонять другое транспортное средство M3 и входить в левую полосу движения из текущей полосы движения. Это обусловлено тем, что определяется то, что другое транспортное средство M2 выходит из скрытой области R. Тем не менее, имеется вероятность того, что если другое транспортное средство M2 фактически существует в скрытой области R и собирается входить в правую полосу движения из текущей полосы движения, курс другого транспортного средства M2 может пересекать курс рассматриваемого транспортного средства M0. Напротив, устройство 100 отслеживания объектов согласно второму варианту осуществления назначает новую идентификационную информацию объекту 11, который выходит из скрытой области R, и не удаляет информацию относительно другого транспортного средства M1 или информацию относительно другого транспортного средства M2. Это позволяет устройству 100 отслеживания объектов выполнять надежное действие при вождении.
[0062] Помимо этого, устройство 100 отслеживания объектов продолжает определение того, что объект(ы) существует в скрытой области, до тех пор, пока устройство 100 отслеживания объектов не завершит назначение новой идентификационной информации каждому из объектов, которые существуют в скрытой области. После завершения назначение новой идентификационной информации каждому объекту, который существует в скрытой области, устройство 100 отслеживания объектов удаляет всю старую идентификационную информацию. В силу этого, даже в случае, если несколько объектов входят в скрытую область и временно исчезают, устройство 100 отслеживания объектов допускает предотвращение назначения каждому объекту неправильной идентификационной информации, отличающейся от информации, которая назначается объекту до того, как объект скрывается, и может улучшать рабочие характеристики отслеживания объектов.
Третий вариант осуществления
[0063] Далее приводится описание для третьего варианта осуществления настоящего изобретения. Конфигурация устройства 100 отслеживания объектов согласно третьему варианту осуществления является идентичной конфигурации устройства 100 отслеживания объектов согласно первому варианту осуществления. Третий вариант осуществления отличается от первого варианта осуществления с точки зрения окружения при вождении. Окружение при вождении, поясненное в первом варианте осуществления, представляет собой прямую проезжую часть, которая не имеет разветвления. Окружение при вождении, которое поясняется в третьем варианте осуществления, представляет собой проезжую часть, которая имеет точку столкновения.
[0064] Со ссылкой на фиг. 11A-11C, приводится описание для того, как отслеживание объектов выполняется для проезжей части, имеющей точку столкновения, к примеру, на скрещении дорог. В этой связи, в третьем варианте осуществления, точка столкновения означает точку, в которой пути соответствующих других транспортных средств M1, M2 могут сталкиваться друг с другом.
[0065] Как проиллюстрировано на фиг. 11A, во время t, модуль 31 отслеживания объектов задает номера T1-T3 для отслеживания для других транспортных средств M1-M3, присутствующих около рассматриваемого транспортного средства M0. Между тем, модуль 35 назначения идентификационных номеров назначает идентификационные номера ID1-ID3 другим транспортным средствам M1-M3.
[0066] После этого, как проиллюстрировано на фиг. 11B, в случае если во время t+1, другие транспортные средства M1, M2 входят в скрытую область R, и модуль 31 отслеживания объектов становится неспособным отслеживать транспортные средства M1, M2, модуль 31 отслеживания объектов задает флаги номеров T1, T2 для отслеживания, заданные для транспортных средств M1, M2, равными 1. После этого, на основе картографической информации, модуль 34 вычисления маршрутов вычисляет точку P столкновения, в которой другие транспортные средства M1, M2 могут сталкиваться друг с другом. После этого, модуль 33 оценки позиционной взаимосвязи оценивает количества T времени, требуемые для других транспортных средств M1, M2, чтобы достигать точки P столкновения. Каждое количество T времени выражается с помощью уравнения (1).
[0067] T=L/V уравнение (1)
где L является расстоянием до точки P столкновения, и V является скоростью, с которой объект движется до въезда в скрытую область R. В этой связи, в третьем варианте осуществления, позиционная взаимосвязь между несколькими объектами включает в себя не только позиционную взаимосвязь в скрытой области R, но также и количества времени, требуемые для нескольких объектов, чтобы достигать точки P столкновения.
[0068] С использованием количеств T времени, модуль 31 отслеживания объектов определяет то, следует или нет продолжать номера для отслеживания. Когда количество времени, требуемое для другого транспортного средства M1, чтобы достигать точки P столкновения, обозначается посредством TM1, и количество времени, требуемое для другого транспортного средства M2, чтобы достигать точки P столкновения, обозначается посредством TM2, разность времен между количествами TM1, TM2 времени, требуемыми для других транспортных средств M1, M2, чтобы достигать точки P столкновения, вычисляется как "количество TM2 времени минус количество TM1 времени". Модуль 31 отслеживания объектов определяет то, не меньше либо нет эта разность времен предварительно определенного количества времени (например, 2 секунд). В случае если разность времен равна или выше предварительно определенного количества времени, модуль 31 отслеживания объектов определяет то, что другое транспортное средство M2 в приоритетной полосе движения должно достигать точки P столкновения раньше другого транспортного средства M1. Другими словами, как проиллюстрировано на фиг. 11C, во время t+2, модуль 31 отслеживания объектов определяет то, что объект, который выходит из скрытой области R, представляет собой другое транспортное средство M2. Модуль 31 отслеживания объектов продолжает информацию относительно номера T2 для отслеживания, ассоциированного с другим транспортным средством M2, и задает флаг номера T2 для отслеживания равным 0. Между тем, модуль 35 назначения идентификационных номеров продолжает назначение идентификационного номера ID2 другому транспортному средству M2.
[0069] С другой стороны, в случае если разность времен меньше предварительно определенного количества времени, когда, как проиллюстрировано на фиг. 12A, объект 11, который выходит из скрытой области R первым, обнаруживается, модуль 31 отслеживания объектов не может определять то, представляет собой объект 11 другое транспортное средство M1 или другое транспортное средство M2. Причина этого заключается в том, что модуль 31 отслеживания объектов не может определять то, какое из других транспортных средств M1, M2 уступает в результате другому. С учетом этого, модуль 31 отслеживания объектов задает новый номер T4 для отслеживания для объекта 11. Между тем, модуль 35 назначения идентификационных номеров назначает новый идентификационный номер ID4 объекту 11. В этом случае, модуль 31 отслеживания объектов сохраняет, но не удаляет, информацию относительно номера T1 для отслеживания и информацию относительно номера T2 для отслеживания.
[0070] После этого, когда, как проиллюстрировано на фиг. 12B, датчик 10 объектов обнаруживает объект 12, который выходит из скрытой области R вторым во время t+3, модуль 31 отслеживания объектов не может определять то, представляет собой объект 12 другое транспортное средство M1 или д другое транспортное средство M2. С учетом этого, модуль 31 отслеживания объектов задает новый номер T5 для отслеживания для объекта 12. Между тем, модуль 35 назначения идентификационных номеров назначает новый идентификационный номер ID5 объекту 12. В этом случае, поскольку число назначенных новых идентификационных номеров просто равно числу (два) объектов, которые существуют в скрытой области R, модуль 31 отслеживания объектов определяет то, что объект не существует в скрытой области R, и удаляет информацию относительно каждого из номеров T1, T2 для отслеживания, которые модуль 31 отслеживания объектов сохраняет к настоящему моменту.
[0071] Далее, со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 13, приводится описание для примера того, как работает устройство 100 отслеживания объектов согласно третьему варианту осуществления. Эта блок-схема последовательности операций способа начинается, когда переключатель зажигания включается. В этой связи, операции на этапах S301-S309 и этапах S321-S327 являются идентичными операциям на этапах S101-S109 и этапах S119-S125 на фиг. 6, и подробное описание опускается. Приводится описание только в отношении того, что отличает блок-схему последовательности операций способа на фиг. 13 от блок-схемы последовательности операций способа на фиг. 6.
[0072] На этапе S311, модуль 33 оценки позиционной взаимосвязи оценивает количества времени, требуемые для нескольких объектов, чтобы достигать точки P столкновения.
[0073] На этапе S313, модуль 31 отслеживания объектов определяет то, не меньше или нет разность времен между количествами времени, требуемыми для нескольких объектов, чтобы достигать точки P столкновения, предварительно определенного количества времени. В случае если разность времен равна или выше предварительно определенного количества времени (если "Да" на этапе S313), процесс переходит к этапу S321. С другой стороны, в случае если разность времен меньше предварительно определенного количества времени (если "Нет" на этапах S313), процесс переходит к этапу S315.
[0074] На этапе S315, модуль 35 назначения идентификационных номеров назначает новые идентификационные номера объектам, которые выходят из скрытой области.
[0075] На этапе S317, в случае если все объекты, которые входят в скрытую область R, обнаруживаются (если "Да" на этапе S317), процесс переходит к этапу S319. С другой стороны, в случае если некоторые объекты, которые входят в скрытую область R, не обнаруживаются (если "Нет" на этапе S317), процесс возвращается к этапу S315.
[0076] На этапе S319, модуль 31 отслеживания объектов удаляет информацию относительно каждого номера для отслеживания, который модуль 31 отслеживания объектов сохраняет к настоящему моменту.
[0077] Как пояснено выше, следующая работа и преимущества могут получаться из устройства 100 отслеживания объектов согласно третьему варианту осуществления.
[0078] Устройство 100 отслеживания объектов оценивает разность времен между количествами времени, требуемыми для объектов, чтобы достигать точки P столкновения. В случае если разность времен меньше предварительно определенного количества времени, устройство 100 отслеживания объектов назначает новую идентификационную информацию каждому объекту, когда объект выходит из скрытой области. В силу этого, даже в случае, если несколько объектов входят в скрытую область и временно исчезают, устройство 100 отслеживания объектов допускает предотвращение назначения каждому объекту неправильной идентификационной информации, отличающейся от информации, которая назначается объекту до того, как объект скрывается. Тем не менее, что касается патентного документа 1, в случае, проиллюстрированном на фиг. 12A, объект, который выходит из скрытой области R первым, представляет собой другое транспортное средство M1, но имеется вероятность того, что объект, который выходит из скрытой области R первым, определяется в качестве другого транспортного средства M2. В этом случае, определяется то, что рассматриваемое транспортное средство M0 должно иметь возможность обгонять другое транспортное средство M3 и входить в левую полосу движения из текущей полосы движения. Это обусловлено тем, что определяется то, что другое транспортное средство M2 выходит из скрытой области R. Тем не менее, имеется вероятность того, что если другое транспортное средство M2 фактически существует в скрытой области R и собирается входить в правую полосу движения, курс другого транспортного средства M2 может пересекать курс рассматриваемого транспортного средства M0. Напротив, устройство 100 отслеживания объектов согласно третьему варианту осуществления назначает новую идентификационную информацию объекту 11, который выходит из скрытой области R, и не удаляет информацию относительно другого транспортного средства M1 или информацию относительно другого транспортного средства M2. Это позволяет устройству 100 отслеживания объектов выполнять надежное действие при вождении.
[0079] Вышеприведенные описания предоставлены для вариантов осуществления настоящего изобретения. Описания или чертежи, которые составляют части этого раскрытия сущности, не должны истолковываться как ограничивающие настоящее изобретение. Из этого раскрытия сущности, различные альтернативные варианты осуществления, примеры и технологии работы должны становиться понятными для специалистов в данной области техники.
[0080] Следует отметить, что каждая функция в вышеописанных вариантах осуществления может реализовываться с помощью одной или более схем обработки. Схемы обработки включают в себя программируемые процессоры, такие как обрабатывающие устройства, включающие в себя электрические схемы. Схемы обработки дополнительно включают в себя специализированную интегральную схему (ASIC), выполненную с возможностью выполнять функции, поясненные для вариантов осуществления, и устройство, такое как традиционный схемный компонент.
Промышленная применимость
[0081] Кроме того, настоящее изобретение является применимым к транспортному средству с поддержкой автоматического вождения, которое автоматически движется по пути движения.
Список номеров ссылок
[0075] 100 - устройство отслеживания объектов
10 - датчик объектов
20 - модуль получения картографической информации
30 - контроллер
31 - модуль отслеживания объектов
32 - модуль вычисления скрытых областей
33 - модуль оценки позиционной взаимосвязи
34 - модуль вычисления маршрутов
35 - модуль назначения идентификационных номеров
Изобретение относится к способу отслеживания объектов и к устройству отслеживания объектов. Технический результат заключается в устройстве отслеживания объектов, которые, даже в случае, если несколько объектов входят в скрытую область и временно исчезают, допускают предотвращение назначения каждому объекту неправильной идентификационной информации, отличающейся от информации, которая назначается объекту до того, как объект скрывается. Такой результат достигается тем, что, в случае если несколько объектов, обнаруженных посредством датчика (10) объектов, входят в скрытую область, вычисленную посредством модуля (32) вычисления скрытых областей, модуль (33) оценки позиционной взаимосвязи оценивает позиционную взаимосвязь между несколькими объектами в скрытой области на основе информации относительно каждого из нескольких объектов и полос движения и маршрутов, на которые каждый из нескольких объектов может изменять свои курсы и которые вычисляются посредством модуля (34) вычисления маршрутов. Когда объекты выходят из скрытой области, модуль (35) назначения идентификационных номеров определяет идентификационную информацию относительно каждого объекта на основе позиционной взаимосвязи, оцененной посредством модуля (33) оценки позиционной взаимосвязи. 2 н. и 4 з.п. ф-лы, 26 ил.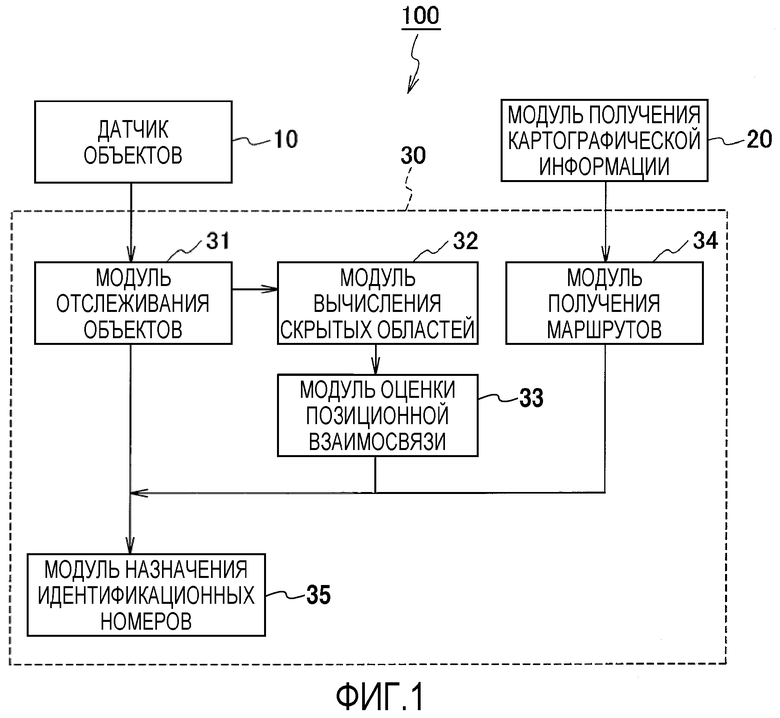
1. Способ отслеживания объектов для:
- устройства отслеживания объектов, которое включает в себя датчик для обнаружения объекта около движущегося тела и контроллер для отслеживания объекта на основе результата обнаружения объекта,
- при этом способ отслеживания объектов содержит этапы, на которых:
- в случае если множество объектов входят в скрытую область в пределах диапазона обнаружения датчика, оценивают позиционную взаимосвязь между множеством объектов в скрытой области; и
- когда объекты выходят из скрытой области, определяют идентификационную информацию относительно каждого объекта на основе оцененной позиционной взаимосвязи.
2. Способ отслеживания объектов по п. 1, в котором в случае, если позиционная взаимосвязь между множеством объектов в скрытой области может оцениваться, идентификационная информация, определенная для каждого объекта до того, как объект входит в скрытую область, продолжает назначаться объекту, когда объект выходит из скрытой области.
3. Способ отслеживания объектов по п. 1 или 2, в котором в случае, если позиционная взаимосвязь между множеством объектов в скрытой области не может оцениваться, каждому объекту назначается новая идентификационная информация, когда объект выходит из скрытой области.
4. Способ отслеживания объектов по п. 3, в котором в случае, если разность времен между количествами времени, требуемыми для множества объектов, чтобы достигать точки столкновения, в которой пути множества объектов сталкиваются друг с другом, меньше предварительно определенного количества времени, новая идентификационная информация назначается каждому объекту, когда объект выходит из скрытой области.
5. Способ отслеживания объектов по п. 3, в котором до тех пор, пока каждому объекту, присутствующему в скрытой области, не назначается новая идентификационная информация, определяется то, что один или более объектов существуют в скрытой области.
6. Устройство отслеживания объектов, содержащее:
- датчик для обнаружения объекта около движущегося тела и
- контроллер для отслеживания объекта на основе результата обнаружения объекта с использованием датчика, при этом:
- в случае если множество объектов входят в скрытую область в пределах диапазона обнаружения датчика, контроллер оценивает позиционную взаимосвязь между множеством объектов в скрытой области, и
- когда объекты выходят из скрытой области, контроллер определяет идентификационную информацию относительно каждого объекта на основе оцененной позиционной взаимосвязи.
| JP 2010176302 A, 12.08.2010 | |||
| JP 2012221452 A, 12.11.2012 | |||
| JP 2016001463 A, 07.01.2016 | |||
| US 20080002857 A1, 03.01.2008 | |||
| СИСТЕМА И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2569051C2 |

