Изобретение относится к области электрической радиосвязи и, в частности, к детектированию фазоманипулированных сигналов, применяемому в радиолокационных и радионавигационных системах связи, а также в мобильных системах приема и передачи данных.
Известно, что фазоманипулированные сигналы детектируются путем вычисления корреляционного интеграла на символьном интервале времени с дальнейшим сравнением полученного значения с фиксированным уровнем порогового напряжения [1]. В случае превышения сигналом фиксированного уровня порогового напряжения принимается решение, что передавалась логическая единица, иначе - нуль. Недостатком такого способа является невозможность детектирования сигналов при наличии в них постоянной составляющей.
Известен способ детектирования сигналов, описанный в публикации «Цифровая обработка сигналов», в котором удаление постоянной составляющей реализовано путем вычисления среднего значения для всех имеющихся N отсчетов и вычитания этого среднего значения из каждого из N входных отсчетов [2]. Недостатком такого способа является невозможность детектирования сигналов при наличии в них постоянных составляющих разных амплитуд на различных интервалах времени.
Близким к предлагаемому является способ, описанный в патенте США №2005117666, в котором реализовано множество параллельных линий корреляционного детектирования электрических сигналов, где в каждой из линий устанавливается свой уровень порогового напряжения [3]. Недостатком данного способа являются высокие аппаратные затраты для компенсации постоянной составляющей из большого диапазона значений.
Наиболее близким к предлагаемому изобретению является способ, принятый за прототип и описанный в патенте РФ №2359411, в котором принимаемый фазоманипулированный сигнал и сигнал генератора опорной псевдослучайной последовательности перемежаются в устройствах перемежения, после чего результаты перемежения перемножаются в перемножителе [4]. Результат перемножения подается на вход интегратора, вычисляется сумма результата перемножения принимаемого и опорного сигналов на заданном интервале времени, сравнивается вычисленное значение корреляционного интеграла с фиксированным уровнем порогового напряжения.
Недостатками прототипа при корреляционном детектировании фазоманипулированных сигналов на фоне сосредоточенных и импульсных помех являются зависимость достоверности приема от величины постоянной составляющей в сигнале на выходе демодулятора, поступающем на вход устройства сравнения с фиксированным уровнем порогового напряжения, а также отсутствие адаптивных схем установления уровня порогового напряжения.
Задачей настоящего изобретения является повышение достоверности приема фазоманипулированных сигналов на фоне сосредоточенных и импульсных помех.
Это достигается благодаря тому, что относительно способа помехоустойчивого приема фазоманипулированных сигналов, предложенного в прототипе, включающего в себя вычисление корреляционного интеграла и сравнение значения корреляционного интеграла с нулевым уровнем порогового напряжения, на основании которого выносится решение об информационном символе, дополнительно осуществляют временную синхронизацию, необходимую для выравнивания по времени исходного информационного и принятого проинтегрированного сигналов, организуют взятие отсчетов сигнала после синхронизации с частотой следования импульсов информационного сигнала, вычисляют среднее значение отсчетов принятого сигнала, записывают вычисленные средние значения отсчетов принятого сигналов в память, осуществляют сравнение среднего значения отсчетов принятого сигнала, вычисленного на текущем этапе, и среднего значения отсчетов принятого сигнала, вычисленного на предыдущем этапе, генерируют управляющие сигналы, необходимые для выбора режима сброса или режима накопления среднего значения, вычитают из каждого отсчета полученное среднее значение отсчетов принятого сигнала.
Предлагаемый способ включает в себя ветвь отрицательной обратной связи, сводящую постоянную составляющую любого уровня к минимально возможному значению, определяемому разрешающей способностью используемых при реализации способа аппаратных устройств типа АЦП и ЦАП, рассмотрение которых выходит за рамки предлагаемого способа. Таким образом, предлагаемый способ не является устройством измерения постоянной составляющей, и, как следствие, грубые погрешности измерений в предлагаемом способе корреляционного детектирования фазоманипулированных сигналов исключаются из рассмотрения.
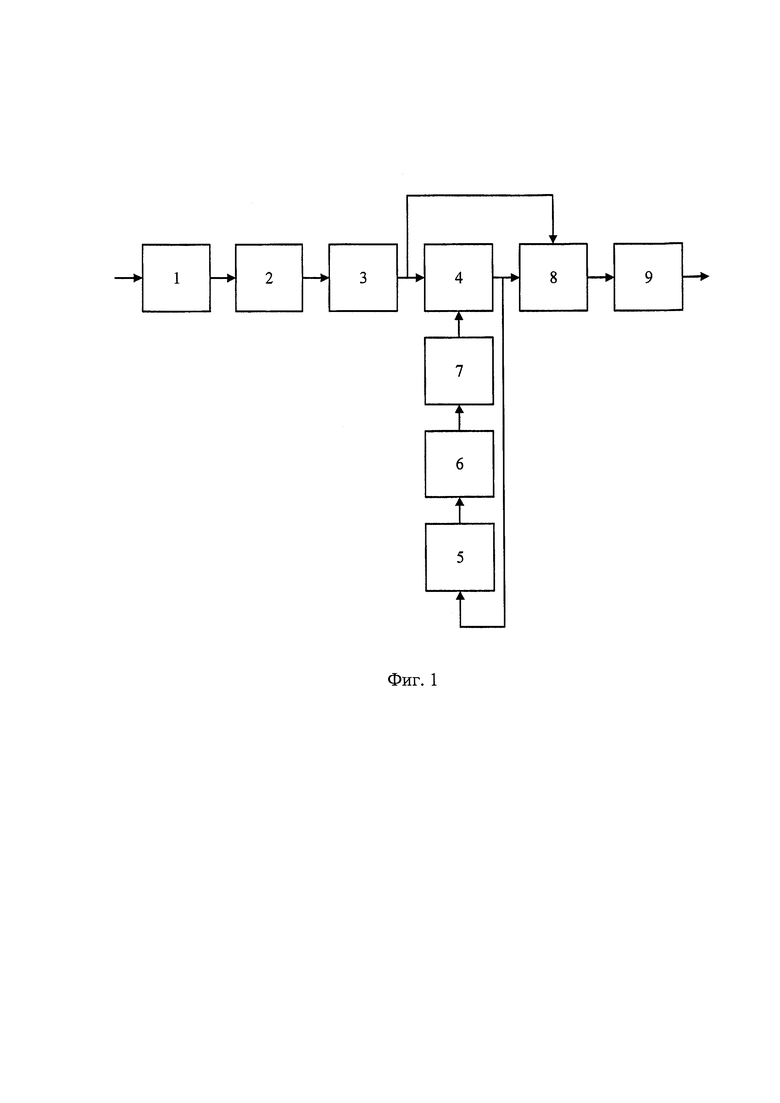
Суть предлагаемого способа показана на Фиг. 1, где 1 - блок вычисления корреляционного интеграла, 2 - блок осуществления временной синхронизации, необходимой для выравнивания по времени исходного информационного и принятого проинтегрированного сигналов, 3 - блок взятия отсчетов сигнала после синхронизации с частотой следования импульсов информационного сигнала, 4 - блок вычисления среднего значения отсчетов принятого сигнала, 5 - блок хранения вычисленных средних значений отсчетов принятого сигнала, 6 - блок сравнения среднего значения отсчетов принятого сигнала, вычисленного на текущем этапе, и среднего значения отсчетов принятого сигнала, вычисленного на предыдущем этапе, 7 - блок генерации управляющих сигналов, необходимых для выбора режима сброса или режима накопления среднего значения, 8 - блок вычисления разницы каждого из отсчетов и полученного среднего значения отсчетов принятого сигнала, 9 - блок сравнения полученного после вычета среднего значения сигнала с нулевым уровнем порогового напряжения.
Для реализации способа выполняют следующую последовательность действий:
1) Вычисляют корреляционный интеграл на символьном интервале времени Тинформ согласно выражению:

где wrxi(t) - принятый сигнал;
2) Осуществляют временную синхронизацию, необходимую для выравнивания по времени исходного информационного wtx(t) и принятого проинтегрированного wrxi(t) сигналов. Сигнал на выходе блока 2 описывается выражением:

где Δt - задержка wrxi(t) относительно wtx(t);
3) Организуют взятие отсчетов сигнала после синхронизации с частотой следования импульсов информационного сигнала 
Сигнал на выходе блока 3 описывается выражением: 
где s(i) - i-ый отсчет принятого сигнала;
4) Вычисляют среднее значение отсчетов принятого сигнала по формуле:
I
где mean(j) - среднее значение, вычисленное к j-ому отсчету;
5) Записывают вычисленные средние значения отсчетов принятого сигнала в память;
6) Осуществляют сравнение среднего значения отсчетов принятого сигнала, вычисленного на текущем этапе, и среднего значения отсчетов принятого сигнала, вычисленного на предыдущем этапе. Если относительная разница этих значений превышает заданный уровень 5-10 раз подряд, то блок сравнения среднего значения отсчетов принятого сигнала, вычисленного на текущем этапе, и среднего значения отсчетов принятого сигнала, вычисленного на предыдущем этапе, сигнализирует блоку генерации управляющих сигналов, необходимых для выбора режима сброса или режима накопления среднего значения, о необходимости активации режима сброса. В противном случае изменения режима работы не происходит. Это необходимо для организации более точной оценки среднего значения в случае изменения параметров канала, частоты и уровня постороннего помехового воздействия и с целью избежания неустойчивого возбуждения системы. Значение, относительно которого ведется сравнение, задается в устройстве, реализованном согласно предлагаемому способу, пользователем. Пользователь выставляет значение критичной для его системы относительной разницы вычисленного на текущем этапе среднего значения и вычисленного на предыдущем этапе среднего значения.
Относительную разницу scompare(j) вычисленного на текущем этапе среднего значения mean(j) и вычисленного на предыдущем этапе среднего значения mean(j-1) определяют согласно выражению:

где j - номер этапа.
В выражении (5) предполагается, что scomvare(l)=0, а при mean(j)=0 scompare(j)=0;
7) Генерируют управляющие сигналы, необходимые для выбора режима сброса или режима накопления среднего значения. В первую очередь, возможен режим сброса, при котором все ячейки памяти устройства, реализующего предлагаемый способ, переходят в начальное состояние, определяемое пользователем. Вычисление среднего значения начинается с символа, идущего по времени сразу после перехода сигнала сброса в неактивное состояние, то есть активируется режим накопления среднего значения. Режим сброса может быть активирован пользователем принудительно.
Вторым возможным режимом работы является режим накопления среднего значения. В данном режиме в соответствии с последовательностью действий 1)-9) производят вычисление среднего значения, сводят постоянную составляющую любого уровня к минимально возможному значению, после чего детектируют фазоманипулированный сигнал.
Если от блока сравнения среднего значения отсчетов принятого сигнала, вычисленного на текущем этапе, и среднего значения отсчетов принятого сигнала, вычисленного на предыдущем этапе блоку генерации управляющих сигналов, необходимых для выбора режима сброса или режима накопления среднего значения, поступает сигнал о необходимости активации режима сброса, то активируется режим сброса. В противном случае изменения режима работы не происходит;
8) Вычитают из сигнала s(j) среднее значение mean(j). Сигнал на выходе блока 8 описывается выражением:

где s0(j) - j-ый отсчет принятого сигнала после временной синхронизации и вычитания вычисленного среднего значения;
9) Значения s0(j) сравнивают с нулевым уровнем порогового напряжения. Сигнал sign(j) на выходе блока 9 описывается выражением:

Сигнал sign(j) является выходным сигналом.
Рассмотрим пример осуществления способа.
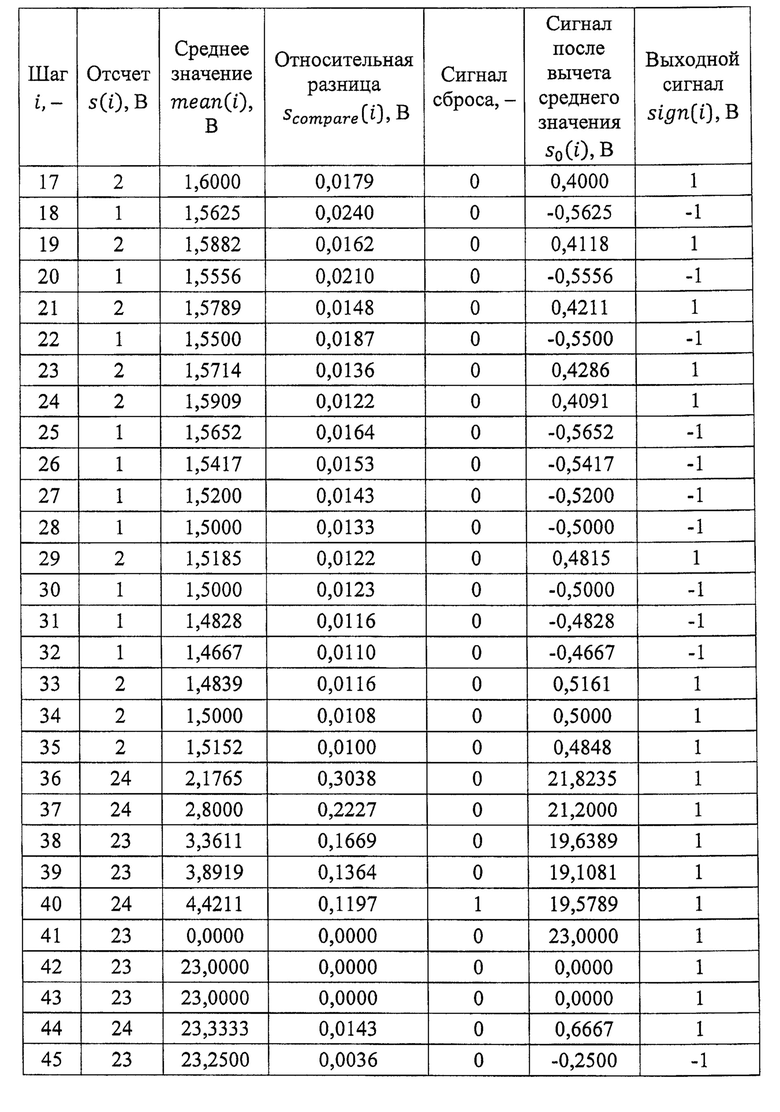
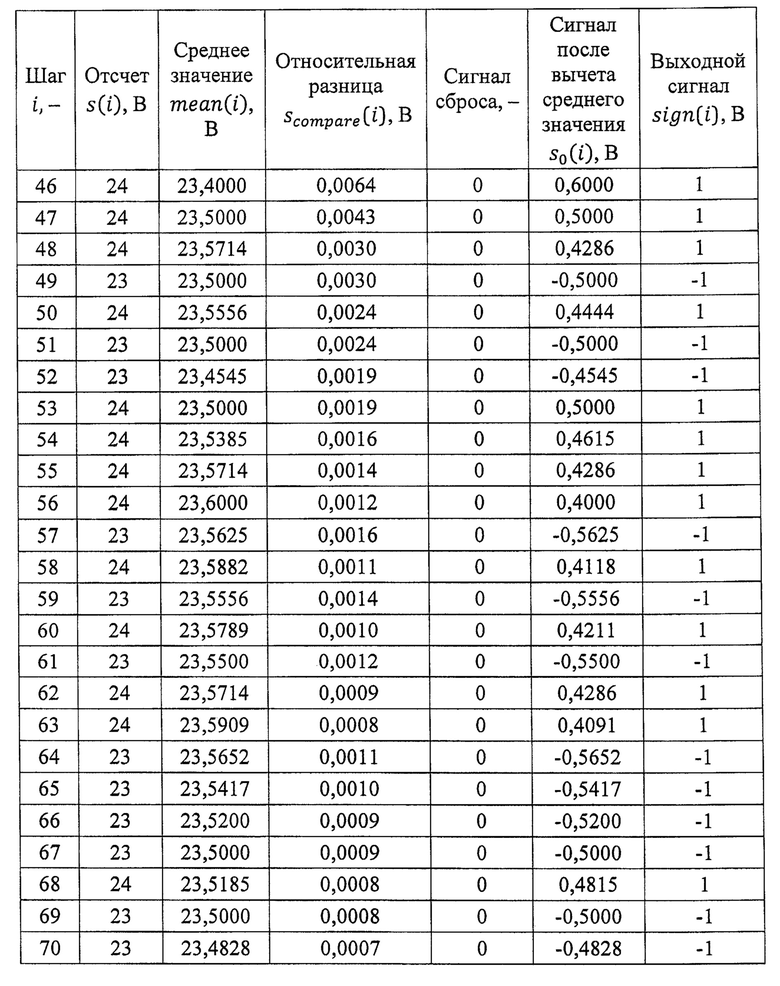
На вход блока вычисления корреляционного интеграла поступает биполярный сигнал с амплитудой 0,5 В, к которому на протяжении первых 35 временных интервалов добавлена постоянная составляющая 1,5 В, а на протяжении последующих 35 временных интервалов добавлена постоянная составляющая 23,5 В, то есть на вход блока вычисления корреляционного интеграла на протяжении первых 35 временных интервалов поступает последовательность импульсов с амплитудами 1 В и 2 В, а на протяжении последующих 35 временных интервалов поступает последовательность импульсов с амплитудами 23 В и 24 В. Тогда на вход блока осуществления временной синхронизации, необходимой для выравнивания по времени исходного информационного и принятого проинтегрированного сигналов, с выхода блока вычисления корреляционного интеграла в соответствии с пунктом 1) последовательности действий согласно выражению (1) будет поступать пилообразный сигнал с высотой пиков 1 В и 2 В на протяжении первых 35 временных интервалов, а на протяжении последующих 35 временных интервалов - с высотой пиков 23 В и 24 В. В таблице 1 в первом столбце приведены номера отсчетов или номера шагов вычисления, а во втором столбце - значения отсчетов, взятых после осуществления синхронизации в соответствии с пунктом 2) последовательности действий согласно выражению (2) с частотой следования импульсов информационного сигнала в соответствии с пунктом 3) последовательности действий согласно выражению (3). В третьем столбце таблицы 1 приведены средние значения отсчетов принятого сигнала, вычисленные по формуле (4) в соответствии с пунктом 4) последовательности действий. В четвертом столбце таблицы 1 в соответствии с пунктами 5) и 6) последовательности действий приведены значения относительной разницы scompare(j) вычисленного на текущем этапе среднего значения mean(j) и вычисленного на предыдущем этапе среднего значения mean(j-1), полученные согласно выражению (5). В пятом столбце таблицы 1 в соответствии с пунктами 6) и 7) последовательности действий приведены логические уровни сигнала сброса, где нуль - сигнал сброса неактивен, а единица - сигнал сброса активен. Можно заметить, что на втором шаге сигнал сброса переходит в активное состояние принудительно по требованию пользователя для того, чтобы все ячейки памяти устройства, реализующего предлагаемый способ, перешли в начальное состояние. При вычислении сигнала сброса принято, что пользователь выставил значение критичной для его системы относительной разницы вычисленного на текущем этапе среднего значения и вычисленного на предыдущем этапе среднего значения на уровне 0,07. В шестом столбце таблицы 1 в соответствии с пунктом 8) последовательности действий согласно выражению (6) приведены значения сигнала s0(i) после вычета среднего значения, а в седьмом столбце таблицы 1 в соответствии с пунктом 9) последовательности действий согласно выражению (7) приведены значения выходного сигнала sign(j).
Можно заметить, что, начиная с пятого шага, информация восстановлена верно и что на 36 шаге происходит резкое увеличение относительной разницы scompare(j) вычисленного на текущем этапе среднего значения mean(j) и вычисленного на предыдущем этапе среднего значения mean(j-1), что после пятикратного превышения заданного пользователем значения критичной для его системы относительной разницы вычисленного на текущем этапе среднего значения и вычисленного на предыдущем этапе среднего значения на уровне 0,07 происходит переход сигнала сброса в активное состояние. Начиная с 42 шага информация восстановлена верно и для второго рассмотренного значения постоянной составляющей.
Таким образом, в настоящем примере проиллюстрирована возможность детектирования сигналов при наличии в них постоянных составляющих разных амплитуд на различных интервалах времени. 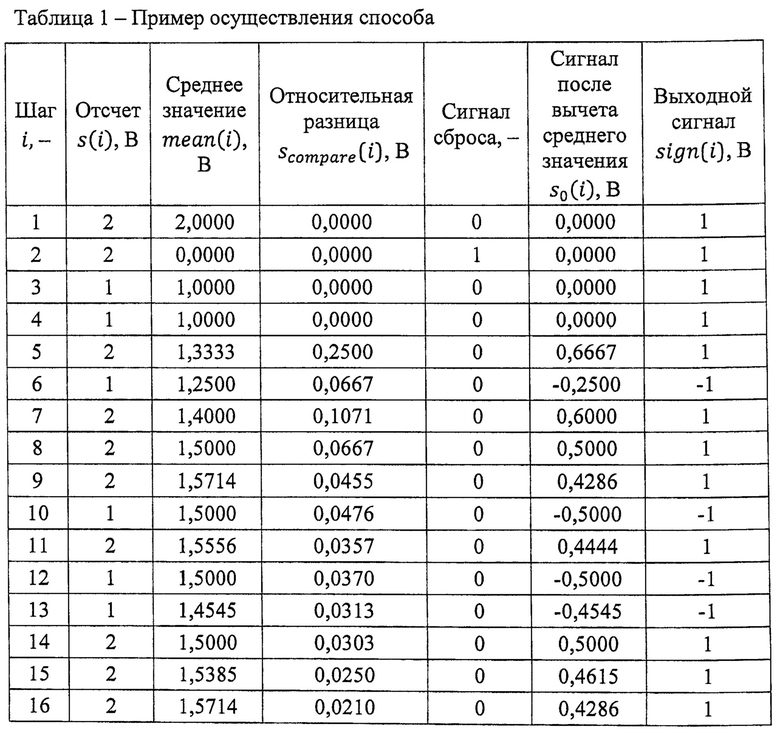
Способ корреляционного детектирования фазоманипулированных сигналов устраняет зависимость достоверности приема от величины постоянной составляющей в сигнале на выходе демодулятора, поступающем
на вход устройства сравнения с фиксированным уровнем порогового напряжения, поскольку из принимаемого сигнала исключается постоянная составляющая, маскирующая полезный сигнал, а также обеспечивает устойчивость к сосредоточенным и импульсным помехам и предоставляет возможность достоверного приема информации при изменяющихся во времени параметрах канала, частоте и уровне воздействующей помехи.
Источники информации:
1. Феер К. Беспроводная цифровая связь. Методы модуляции и расширения спектра. Пер. с англ. под ред. В.И. Журавлева. - М.: Радио и связь, 2000. - 520 с.
2. Лайонс Р. Цифровая обработка сигналов. Пер. с англ. под ред. А.А. Бритова. - М.: ООО «Бином-Пресс», 2006. - 656 с.
3. Патент США №2005117666. Method and apparatus for adapting threshold values in electronic signal processing devices.
4. Патент РФ №2359411. Способ помехоустойчивого приема фазоманипулированных сигналов - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2271071C2 |
| ДЕМОДУЛЯТОР СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ | 2011 |
|
RU2460224C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ПОКАЗАТЕЛЯ КАЧЕСТВА ЦИФРОВОГО СИГНАЛА | 2008 |
|
RU2468519C2 |
| СПОСОБ ОБРАБОТКИ ГИДРОАКУСТИЧЕСКИХ ШУМОПОДОБНЫХ ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2014 |
|
RU2552534C1 |
| Способ позиционирования в сетях связи с использованием технологии программно-конфигурируемого радио | 2023 |
|
RU2817862C1 |
| СПОСОБ УСТАНОВЛЕНИЯ ТАКТОВОЙ СИНХРОНИЗАЦИИ ПО ИНФОРМАЦИОННЫМ СИГНАЛАМ НА ОСНОВЕ РЕЗУЛЬТАТОВ ДЕКОДИРОВАНИЯ | 2015 |
|
RU2628263C2 |
| СПОСОБ РАЗДЕЛЕНИЯ СИГНАЛОВ ПРИ ДЕЙСТВИИ ВНУТРИСИСТЕМНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2615791C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БЫСТРОЙ СИНХРОНИЗАЦИИ В СИСТЕМАХ С ШУМОПОДОБНЫМИ СИГНАЛАМИ | 1989 |
|
SU1841074A1 |
| СПОСОБ ПОМЕХОУСТОЙЧИВОГО ПРИЕМА ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2007 |
|
RU2359411C2 |
| СПОСОБ КОРРЕЛЯЦИОННОГО ПРИЁМА СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2237978C2 |
Изобретение относится к области электрической радиосвязи и может быть использовано для детектирования фазоманипулированных сигналов в радиолокационных и радионавигационных системах связи, а также в мобильных системах приема и передачи данных. Техническим результатом является устранение зависимости достоверности приема от величины постоянной составляющей в сигнале на выходе демодулятора, поступающем на вход устройства сравнения с фиксированным уровнем порогового напряжения, обеспечение устойчивости к сосредоточенным и импульсным помехам, а также предоставление возможности достоверного приема информации при изменяющихся во времени параметрах канала, частоте и уровне воздействующей помехи. Способ корреляционного детектирования фазоманипулированных сигналов включает вычисление корреляционного интеграла и сравнение значения корреляционного интеграла с нулевым уровнем порогового напряжения, на основании которого выносится решение об информационном символе, осуществление временной синхронизации, необходимой для выравнивания по времени исходного информационного и принятого проинтегрированного сигналов, взятие отсчетов сигнала после синхронизации с частотой следования импульсов информационного сигнала, вычисление среднего значения отсчетов принятого сигнала, запись вычисленных средних значений отсчетов принятого сигнала в память, сравнение среднего значения отсчетов принятого сигнала, вычисленного на текущем этапе, и среднего значения отсчетов принятого сигнала, вычисленного на предыдущем этапе, генерацию управляющих сигналов, необходимых для выбора режима сброса или режима накопления среднего значения, вычитание из каждого отсчета полученного среднего значения отсчетов принятого сигнала. 1 ил., 1 табл.
Способ корреляционного детектирования фазоманипулированных сигналов, включающий вычисление корреляционного интеграла и сравнение значения корреляционного интеграла с нулевым уровнем порогового напряжения, на основании которого выносится решение об информационном символе, отличающийся тем, что дополнительно осуществляют временную синхронизацию, необходимую для выравнивания по времени исходного информационного и принятого проинтегрированного сигналов, организуют взятие отсчетов сигнала после синхронизации с частотой следования импульсов информационного сигнала, вычисляют среднее значение отсчетов принятого сигнала, записывают вычисленные средние значения отсчетов принятого сигнала в память, осуществляют сравнение среднего значения отсчетов принятого сигнала, вычисленного на текущем этапе, и среднего значения отсчетов принятого сигнала, вычисленного на предыдущем этапе, генерируют управляющие сигналы, необходимые для выбора режима сброса или режима накопления среднего значения, вычитают из каждого отсчета полученное среднее значение отсчетов принятого сигнала.
| СПОСОБ ПОМЕХОУСТОЙЧИВОГО ПРИЕМА ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2007 |
|
RU2359411C2 |
| Устройство для детектирования фазоманипулированных сигналов | 1982 |
|
SU1042203A1 |
| ЛАЙОС Р | |||
| Цифровая обработка, Москва: ООО "Бином-Пресс", 2006, с.543 | |||
| РАБИНОВИЧ С.Г | |||
| Погрешности измерений, Москва: "Энергия", 1978, с.20-21. | |||

