Область техники, к которой относится изобретение
Изобретение относится к радиотехнике в целом и способам определения местоположения (ОМП) в сетях связи в частности и может использоваться для определения пространственных координат подвижного устройства в условиях отсутствия сигналов глобальных навигационных спутниковых систем (ГНСС) по опорным сигналам сотовых сетей подвижной связи стандарта LTE, принятым из радиоэфира устройством, работающим по технологии программно-конфигурируемого радио, которое может не являться абонентом сетей LTE.
Уровень техники
Использование инфраструктуры базовых стаций eNB (eNodeB) сотовых сетей подвижной радиосвязи LTE (Long-Term Evolution) позволяет решать задачи определения местоположения (ОМП) подвижных пользовательских устройств UE (User Equipment) при невозможности надежного приема сигналов глобальных навигационных спутниковых систем (ГНСС).
Альтернативой ГНСС являются сигналы, принимаемые из радиоэфира по возможности, например, опорные сигналы сетей связи наиболее распространенного стандарта LTE. С точки зрения архитектуры сетевого позиционирования и степени вовлечения пользовательского устройства и сетевой инфраструктуры в процесс ОМП, в настоящем изобретении рассматривается позиционирование на основе пользовательского устройства без участия сетевой инфраструктуры с обработкой принимаемых от eNB радиосигналов исключительно в устройстве UE.
Для решения навигационной задачи пользовательскому устройству необходимы первичные измерения наблюдаемой разности времен прихода сигналов OTDOA (Observed Time Difference of Arrival), полученные из дальномерных измерений времен прихода сигналов ТОА (Time of Arrival), синхронно излучаемых базовыми станциями eNB, а для их вторичной обработки UE нужно знать координаты eNB. По заданным идентификаторам сот Cel-lID координаты eNB можно получить, например, из открытой базы данных OpenCellid, где доступны местоположения базовых станций в геоцентрической системе координат.
Для апробации технической возможности позиционирования по опорным сигналам сетей связи широкое распространение получили технологии программно-конфигурируемого радио SDR (Software-Defined Radio). Для использования в задачах позиционирования опорных сигналов LTE, син-хронно излучаемых базовыми станциями eNB, необходимо разработать, программно-реализовать и апробировать в подвижном приемном устройстве, работающем по технологии программно-конфигурируемого радио, комплексный способ приема и первичной параллельной обработки доступных в радиоэфире опорных сигналов сети LTE.
В сетях подвижной связи LTE и NR (New Radio) на радиоинтерфейсе используется технология мультиплексирования с ортогональным частотным разделением OFDM (Orthogonal Frequency Division Multiplexing). Для радиоинтерфейса OFDM прием и обработка опорных радиосигналов устройством, построенным с использованием технологии программно-конфигурируемого радио, имеет определенную специфику, включая захват и подстройку к OFDM опорным радиосигналам, синхронно излучаемым несколькими базовыми станциями eNB, а также извлечение первичных измерений времени прихода сигналов ТОА из принимаемых OFDM радиосигналов нескольких базовых станций eNB.
Для сбора и обработки первичных навигационных измерений в сетях LTE, вместе с сигналами первичной PSS (Primary Synchronization Signal) и вторичной SSS (Secondary Synchronization Signal) синхронизации, используются опорные сигналы соты CRS (Cell Specific Reference Signal) и опорные сигналы позиционирования PRS (Positioning Reference Signal). Все перечисленные выше последовательности опорных сигналов, за исключением PRS, транслируются базовыми станциями eNB в каждом кадре в режиме широковещания независимо от наличия в зоне обслуживания eNB пользовательских устройств UE, являющихся абонентами сети LTE данного оператора. Поэтому широковещательные опорные сигналы PSS, SSS и CRS сетей LTE разных операторов можно использовать для целей позиционирования пользовательскими устройствами UE, не являющимися абонентами сети LTE какого-либо отдельного оператора.
Настоящее изобретение описывает комплексный способ приема и первичной параллельной обработки доступных в радиоэфире сигналов первичной PSS и вторичной SSS синхронизации, а также опорных сигналов соты CRS стандарта LTE для определения дальномерных измерений ТОА и затем получения первичных измерений наблюдаемой разности времен прихода сигналов OTDOA, используемых для вторичной обработки с оценкой координат.
Раскрытие сущности изобретения
Известен способ и устройство для определения местоположения по dl-otdoa (наблюдаемым различиям во времени прибытия в нисходящей линии связи) в системе беспроводной связи lte (долгосрочного развития) (см. 1. патент РФ на изобретение №RU 2510157 С2, МПК H064W 64/00, опубл. 20.03.2014), в котором представлен порядок выравнивания подкадров определения местоположения по нескольким сотам для того, чтобы снизить помехи от символов данных сот в окрестности соты, обслуживающей данное подвижное устройство, которое выполняет измерения для определения своего местоположения. Для реализации указанного способа выбирают момент времени, в течение которого должна произойти передача подкадров определения местоположения в сети беспроводной связи. Для этого базовые станции в сети беспроводной связи информируются о выбранном моменте времени, после чего базовые станции планируют и передают подкадры определения местоположения на основе выбранного момента времени. Данный способ призван обеспечить синхронную передачу кадров определения местоположения одновременно несколькими базовыми станциями сети беспроводной связи, благодаря чему подвижное устройство сможет осуществить первичные измерения разностей времен прихода сигналов с низким уровнем внутрисистемных помех.
Данный способ определения местоположения по наблюдаемой разности времен прихода сигналов в системе беспроводной связи LTE характеризуется следующими недостатками:
- увеличение времени выполнения процедуры позиционирования вследствие необходимости предварительного согласования между базовыми станциями моментов начала синхронной передачи подкадров определения местоположения по нескольким сотам;
- сокращение общего для OFDM сигнала частотно-временного ресурса, который вместо передачи полезных данных потребуется занять под передачу подкадров определения местоположения, а также под передачу сигналов предварительного согласования между базовыми станциями самих моментов начала передачи подкадров определения местоположения.
Известен способ и устройство для определения информации о местоположении в сетях связи (см. 2. патент РФ на изобретение № RU 2704618 С2, МПК H064W 64/003, H064W 4/02, H064W 4/04, G01S 5/02, опубл. 30.10.2019), в котором описан порядок получения информации о местоположении подвижного устройства в сети связи. Для реализации указанного способа базовые станции из сети связи сначала получают конфигурацию опорного сигнала позиционирования PRS стандарта LTE, специфицированную в 3GPP 36.211, затем сообщают конфигурацию опорного сигнала позиционирования подвижному устройству и после этого передают опорный сигнал позиционирования в соответствии с заданной конфигурацией, по которому подвижное устройство осуществляет измерения разностей времен прихода сигналов от нескольких базовых станций сети связи для последующего определения информации о местоположении. Данный способ призван обеспечить предварительное согласование конфигурации опорного сигнала позиционирования PRS между передающими базовыми станциями и принимающим подвижным устройством на физическом уровне, используя сообщения протоколов управления радиоресурсами RRC и управления доступом к среде MAC, а также сообщения протоколов более высоких уровней.
Данный способ определения информации о местоположении в сетях связи характеризуется следующими недостатками:
- увеличение времени выполнения процедуры позиционирования вследствие необходимости предварительного согласования между базовыми станциями и подвижным устройством конфигурации опорного сигнала позиционирования PRS, по которому производятся измерения разностей времен прихода сигналов от нескольких базовых станций сети связи для последующего определения информации о местоположении;
- сокращение общего для OFDM сигнала частотно-временного ресурса, который вместо передачи полезных данных потребуется занять под передачу опорных сигналов позиционирования PRS на физическом уровне, а также под передачу сообщений предварительного согласования конфигурации опорного сигнала позиционирования стандарта LTE;
- невозможность определения местоположения по опорным сигналам позиционирования PRS для устройства, не являющим абонентом данной сети связи.
Известен способ и система для позиционирования мобильного устройства в сети беспроводной связи пятого поколения (см. 3. патент США на изобретение № US 10433275 В2, МПК H064W 64/00, H04W 88/08, опубл. 01.10.2019). в котором представлен порядок позиционирования мобильного устройства в сети беспроводной связи пятого поколения посредством обмена сообщениями между мобильным устройством и сервером позиционирования в ядре сети пятого поколения через сеть радиодоступа пятого поколения по протоколу LPP (LTE Positioning Protocol) стандарта LTE. Для реализации указанного способа используется предварительная конфигурация опорных сигналов позиционирования PRS стандарта 5G New Radio, по которым устройство затем выполняет измерения наблюдаемой разности времен прихода опорных сигналов.
Данный способ позиционирования мобильного устройства в сети беспроводной связи пятого поколения характеризуется следующими недостатками:
- увеличение времени выполнения процедуры позиционирования вследствие необходимости предварительного согласования между базовыми станциями и подвижным устройством конфигурации опорного сигнала PRS, по которому производятся измерения разностей времен прихода сигналов от нескольких базовых станций сети связи для последующего определения местоположения;
- сокращение общего для OFDM сигнала частотно-временного ресурса, который вместо передачи полезных данных потребуется занять под передачу опорных сигналов позиционирования PRS на физическом уровне, а также под передачу сообщений по протоколу LPP;
- невозможность определения местоположения по опорным сигналам позиционирования PRS для устройства, не являющим абонентом данной сети связи.
Из известных способов наиболее близким аналогом (прототипом) предлагаемого способа по своей технической сущности является способ навигации по сигналам LTE с использованием технологии программно-конфигурируемого радио (см. 4. патент США на изобретение № US 11187774 В2, МПК G01S 5/02, В64С 39/02, B64G 1/10, G01S 5/14, опубл. 30.11.2021). Для реализации указанного способа выполняют следующие операции:
- приемным устройством программно-конфигурируемого осуществляют захват из радиоэфира радиосигнала LTE на известной несущей центральной частоте ƒc, его перенос в область информационных частот и дискретизация с частотой ƒs сигнала с известной шириной полосы частот;
- обнаружение и подстройка к доступным в радиоэфире сигналам первичной синхронизации PSS;
- обнаружение и подстройка к доступным в радиоэфире сигналам вторичной синхронизации SSS;
- определение идентификаторов сот CellIDi по принятым из радиоэфира сигналам первичной PSS и вторичной SSS синхронизации от i=1, …, N обнаруженных базовых станций eNBi (eNodeB);
- грубая оценка времени прихода сигнала  и сдвига частоты
и сдвига частоты  по принятым опорным сигналам LTE для начальной кадровой синхронизации путем вычисления корреляционных функций принятого сигнала с локальными копиями опорных сигналов первичной PSS и вторичной SSS синхронизации для всех установленных идентификаторов сот CellIDi, i=1, …, N базовых станций;
по принятым опорным сигналам LTE для начальной кадровой синхронизации путем вычисления корреляционных функций принятого сигнала с локальными копиями опорных сигналов первичной PSS и вторичной SSS синхронизации для всех установленных идентификаторов сот CellIDi, i=1, …, N базовых станций;
- преобразование выборок принятого сигнала в частотно-временную структуру кадра для последующего извлечения опорных сигналов сот CRS для всех установленных идентификаторов сот CellIDi, i=1, …, N базовых станций;
- уточнение захвата и извлечение параметров времени прихода ТОА ti по опорным сигналам сот CRS, передаваемым в более широкой полосе частот, по сравнению с сигналами первичной PSS и вторичной SSS синхронизации для всех установленных идентификаторов сот CellIDi, i=1, …, N базовых станций;
- подстройка и отслеживание кратковременных первичных измерений времени прихода сигнала ТОА  для всех установленных идентификаторов сот CellIDi, i=1, …, N базовых станций;
для всех установленных идентификаторов сот CellIDi, i=1, …, N базовых станций;
- сбор измерений наблюдаемой разности времен прихода сигналов OTDOA Δt21=t2-t1, Δt31=t3-t1, …, ΔtN1=tN-t1, от i=2, …, N обнаруженных базовых станций eNBi относительно одной опорной, например, eNB1;
- получение координат базовых станций eNBi для всех установленных идентификаторов сот CellIDi, i=1, …, N базовых станций;
- вторичная обработка первичных измерений наблюдаемой разности времен прихода сигналов OTDOA одним из способов гиперболического позиционирования, например, методом наименьших квадратов, и результирующая оценка координат подвижного устройства. Однако данный способ характеризуется:
- продолжительным временем сбора первичных измерений времени прихода сигналов, обусловленным процедурой отслеживания импульсной характеристики канала по сигналу CRS, которую необходимо производить непрерывно на интервале нескольких кадров длительностью 10 мс после их накопления, что может затруднить решение навигационной задачи для высокоподвижных объектов; например, для выполнения требований по оценке координат с частотой менее 10 Гц, за время передачи десяти кадров нужно успеть выполнить как первичные измерения, так и их вторичную обработку, что может оказаться затруднительным при необходимости накопления нескольких кадров;
- недостаточной точностью оценки координат (погрешность более 10 м), обусловленной недостаточной точностью сбора первичных измерений.
Целью заявляемого технического решения является разработка способа, обеспечивающего увеличения зоны доступности определения местоположения за счет приема опорных сигналов стандарта LTE устройством программно-конфигурируемого радио, а также достижение дециметровой точности позиционирования подвижного устройства с частотой сбора первичных измерений до 100 Гц, т.е. за один кадр длительностью 10 мс.
Техническим результатом изобретения является увеличения зоны доступности определения местоположения, уменьшение времени оценки координат, а также повышение точности позиционирования подвижного объекта.
Достижение указанного технического результата обеспечивается в предлагаемом способе позиционирования в сетях связи с использованием приемного устройства, работающего по технологии программно-конфигурируемого радио, в котором осуществляют захват из радиоэфира радиосигнала LTE на известной несущей центральной частоте, его перенос в область информационных частот и дискретизацию с известной шириной полосы частот, затем выполняют обнаружение и подстройку к доступным в радиоэфире сигналам первичной синхронизации, далее реализуют обнаружение и подстройку к доступным в радиоэфире сигналам вторичной синхронизации, затем выполняют определение идентификаторов сот по принятым из радиоэфира сигналам первичной и вторичной синхронизации обнаруженных базовых станций, далее для всех установленных идентификаторов сот базовых станций реализуют грубую оценку времени прихода и сдвига частоты по принятым сигналам LTE для начальной кадровой синхронизации путем вычисления корреляционных функций принятого сигнала с локальными копиями опорных сигналов первичной и вторичной синхронизации, затем выполняют преобразование выборок принятого сигнала в частотно-временную структуру кадра для последующего извлечения опорных сигналов сот, далее реализуют уточнение захвата и извлечение параметров времени прихода по опорным сигналам сот, передаваемым в более широкой полосе частот, по сравнению с сигналами первичной и вторичной синхронизации, затем выполняют подстройку и отслеживание кратковременных первичных измерений времени прихода сигнала, далее осуществляют сбор измерений наблюдаемой разности времен прихода сигналов, затем выполняют получение координат базовых станций и, в заключении, производят вторичную обработку первичных измерений наблюдаемой разности времен прихода сигналов одним из способов гиперболического позиционирования с результирующей оценкой координат устройства, отличающемся тем, что обработка сигналов первичной и вторичной синхронизации на этапе поиска ведется в одной ветви приемника, которая работает на минимальной для стандарта LTE частоте дискретизации, а параллельная обработка на этапе подстройки по опорным сигналам сот ведется в другой ветви приемника, которая работает на максимальной для стандарта LTE частоте дискретизации; грубая оценка временной и частотной расстройки вычисляется на этапе поиска через параметр разницы фаз пиков корреляции двух равных сегментов сигнала первичной синхронизации на интервале передачи одного кадра стандарта LTE; перед детектированием сигналов вторичной синхронизации на этапе поиска и перед обработкой опорных сигналов сот на этапе подстройки выполняется предварительная корректировка окна быстрого преобразования Фурье на основе грубой оценки временной расстройки, полученной из корреляции по сигналу первичной синхронизации; при покадровой обработке списки обнаруженных сигналов первичной и вторичной синхронизации актуализируются путем сравнения пиков корреляционных функций с заданным порогом, что позволяет на минимальной частоте дискретизации оперативно корректировать список идентификаторов обнаруженных сот на этапе поиска, в котором остаются только те базовые станции, идентификаторы которых обнаруживается регулярно на интервале нескольких кадров, и, таким образом, минимизировать время обработки опорных сигналов сот на максимальной частоте дискретизации на этапе подстройки; при извлечении параметров времени прихода по опорным сигналам сот на интервале каждого кадра дополнительно выполняют оценку качества приема опорных сигналов сот через вычисление отношения мощности их корреляционной функции к средней мощности принятого в ресурсном элементе их символа, что позволяет при формировании набора первичных измерений разности дальности оставлять только те базовые станции, значение параметра качества приема которых превышает заданный порог, что позволяет минимизировать ложные срабатывания.
Благодаря перечисленной новой совокупности существенных признаков, в которой новой является процедура грубой оценки временной и частотной расстройки на этапе поиска через параметр разницы фаз пиков корреляции двух равных сегментов сигнала первичной синхронизации на интервале передачи одного кадра стандарта LTE, позволяющая на интервале каждого кадра, во-первых, актуализировать списки обнаруженных сигналов первичной и вторичной синхронизации, во-вторых, параллельно корректировать окно быстрого преобразования Фурье на этапе поиска с минимальной частотой дискретизации и на этапе подстройки с максимальной частотой дискретизации и, в третьих, минимизировать время обработки опорных сигналов сот на максимальной частоте дискретизации на этапе подстройки, а также минимизировать ложные срабатывания при формировании набора первичных измерений, чем достигается повышение доступности, точности и скорости определения пространственных координат подвижного устройства.
Краткое описание чертежей
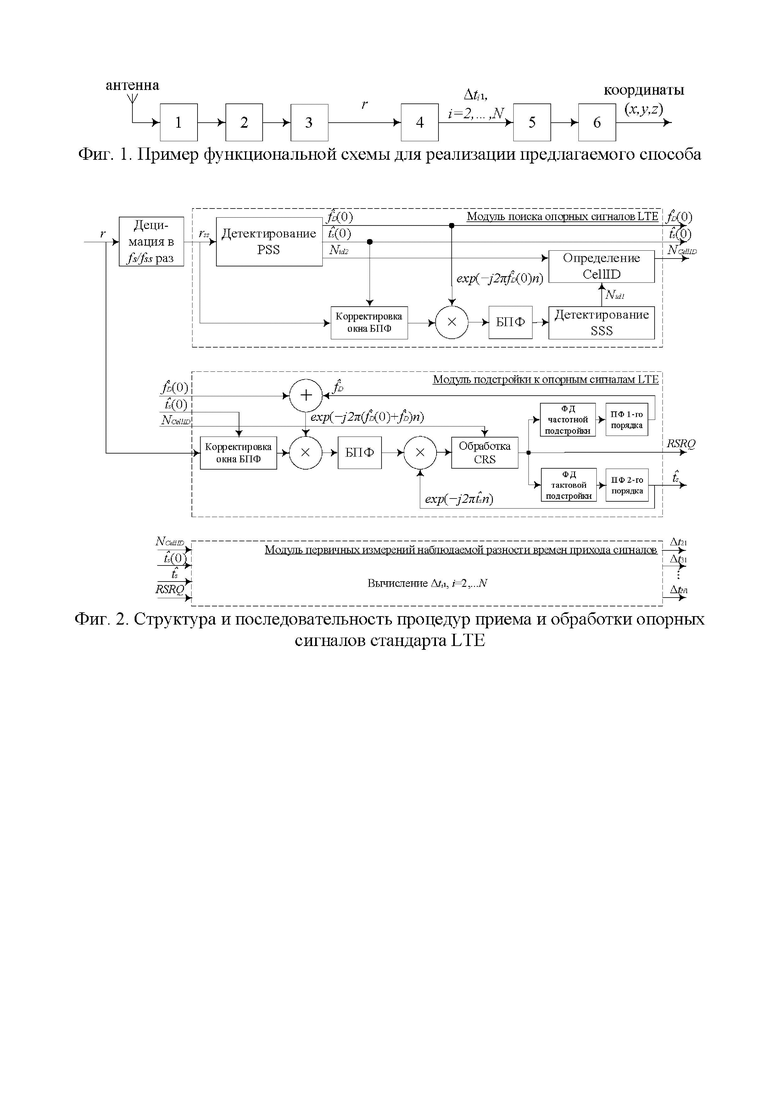
на фиг. 1 показан пример функциональной схемы устройства программно-конфигурируемого радио для реализации предлагаемого способа;
фиг. 2 показана структура и последовательность процедур предлагаемого способа приема и первичной параллельной обработки доступных опорных сигналов стандарта LTE с вычислением разностей времен прихода сигналов.
Осуществление изобретения
Согласно фиг. 1 в функциональную схему устройства программно-конфигурируемого радио для реализации предлагаемого способа входят следующие последовательно соединенные блоки:
блок 1 захвата из радиоэфира радиосигнала LTE на известной несущей центральной частоте;
- блок 2 переноса радиосигнала LTE в область информационных частот;
- блок 3 дискретизации сигнала LTE в области информационных частот;
- блок 4 приема и первичной параллельной обработки доступных опорных сигналов стандарта LTE с вычислением первичных измерений наблюдаемой разности времен прихода сигналов (фиг. 2);
- блок 5 получения координат базовых станций;
- блок 6 вторичной обработки первичных измерений наблюдаемой разности времен прихода сигналов одним из способов гиперболического позиционирования с результирующей оценкой координат устройства.
Реализация предлагаемого способа позиционирования в сетях связи с использованием технологии программно-конфигурируемого радио с учетом функциональной схемы устройства программно-конфигурируемого радио на фиг. 1, осуществляется следующим образом.
В блоке 1 производится захват из радиоэфира радиосигнала LTE на известной несущей центральной частоте.
В блоке 2 выполняется перенос радиосигнала LTE в область информационных частот.
В блоке 3 производится дискретизация сигнала LTE в области информационных частот; на выходе блока 3 получается цифровой сигнал r с максимальной частотой дискретизации.
В блоке 4 (фиг. 2) реализуется прием и первичная параллельная обработка доступных в радиоэфире опорных сигналов стандарта LTE с вычислением первичных измерений наблюдаемых разностей времен прихода сигналов Δt21=t2-t1, Δt31=t3-t1, …, ΔtN1=tN-t1 от i=2, …, N обнаруженных базовых станций eNBi относительно одной опорной, например, eNB1.
Блок 5 отвечает за получение координат для всех установленных идентификаторов сот CellIDi, i=1, …, N обнаруженных базовых станций, например, из открытой базы данных OpenCellid (https://opencellid.org/), где доступны их местоположения в геоцентрической системе координат в формате широты и долготы.
В блоке 6 производится вторичная обработка первичных измерений наблюдаемой разности времен прихода сигналов одним из способов гиперболического позиционирования с результирующей оценкой пространственных координат (х, у, z) подвижного устройства.
Согласно фиг. 2 процедуры способа приема и первичной параллельной обработки доступных в радиоэфире опорных сигналов стандарта LTE с вычислением разностей времен прихода осуществляются следующим образом.
На вход блока приема и первичной параллельной обработки доступных опорных сигналов стандарта LTE поступает цифровой сигнал r с максимальной частотой дискретизации.
На выходе блока приема и первичной параллельной обработки доступных опорных сигналов стандарта LTE вычисляются первичные измерения наблюдаемой разности времен прихода сигналов Δt21, Δt31, …, ΔtNl от i=2, …, N обнаруженных базовых станций eNBi относительно одной опорной, например, eNB1.
В состав блока приема и первичной параллельной обработки опорных сигналов стандарта LTE входят модули поиска опорных сигналов LTE, подстройки к опорным сигналам LTE и первичных измерений наблюдаемой разности времен прихода.
Первый модуль процедур обеспечивает поиск опорных сигналов LTE, определение идентификаторов сот CellID всех принимаемых базовых станций eNB, оценку грубой частотной расстройки  а также установление границы начала кадра с точностью до отсчета для всех обнаруженных eNB, то есть, грубую оценку времени прихода сигнала ТОА
а также установление границы начала кадра с точностью до отсчета для всех обнаруженных eNB, то есть, грубую оценку времени прихода сигнала ТОА 
Второй модуль процедур решает задачу уточнения оценок частотной  и временной
и временной  подстроек по опорным сигналам CRS для идентификаторов сот CellID всех принимаемых базовых станций eNB, а также вычисление показателя RSRQ качества приема сигналов CRS.
подстроек по опорным сигналам CRS для идентификаторов сот CellID всех принимаемых базовых станций eNB, а также вычисление показателя RSRQ качества приема сигналов CRS.
Третий модуль процедур осуществляет вычисление разности времен прихода сигналов Δt21, Δt31, …, ΔtN1 от i=2, …, N относительно опорной базовой станции eNB1, в роли которой выступает первая обнаруженная eNB по результатам работы модуля поиска опорных сигналов LTE.
В первом модуле поиска опорных сигналов LTE для обнаружения опорных сигналов LTE и определения CellID базовых станций eNB используются первичный PSS и вторичный SSS сигналы синхронизации соответственно.
Опорные сигналы PSS и SSS всегда передаются в минимальной ширине полосы частот ΔF=1,4 МГц, поэтому обработка PSS и SSS ведется в отдельной ветви блока приема и первичной параллельной обработки принятого цифрового сигнала r (фиг. 2), которая работает на пониженной частоте дискретизации.
Для подачи в блок поиска опорных сигналов LTE отсчеты принятого сигнала r с максимальной частотой дискретизации проходят через процедуру децимации в ƒs/ƒss раз, где ƒss=1,92 МГц - минимальная частота дискретизации принятого сигнала для минимальной ширины полосы частот ΔF=1,4 МГц, a ƒs=30,72 МГц - максимальная частота дискретизации принятого сигнала r для максимальной ширины полосы частот ΔF=20 МГц.
В модуле поиска опорных сигналов LTE (фиг. 2) первым этапом является детектирование первичного сигнала синхронизации PSS.
Детектирование PSS выполняется во временной области при помощи трех согласованных фильтров (СФ), коэффициентами которых являются отсчеты PSS сигнала согласно стандарту LTE. Обработка PSS выполняется согласно выражениям:
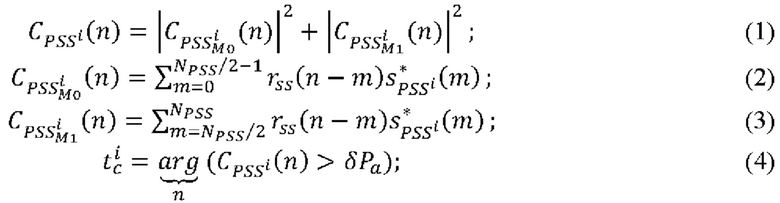
где rss - отсчеты принятого сигнала в полосе 1,4 МГц; i=0, 1, 2 - номер PSS; NPSS=128 длина выборки PSS, равная 128 отсчетам;  комплексно сопряженные отсчеты i-го PSS;
комплексно сопряженные отсчеты i-го PSS;
 - корреляционная функция (КФ) по i-му PSS, полученная как сумма корреляций по двум сегментам i-го PSS, а именно, по сегментам
- корреляционная функция (КФ) по i-му PSS, полученная как сумма корреляций по двум сегментам i-го PSS, а именно, по сегментам  δ - константа, подбирается эмпирически; Ра - средняя мощность на участке детектирования PSS; * - оператор комплексного сопряжения.
δ - константа, подбирается эмпирически; Ра - средняя мощность на участке детектирования PSS; * - оператор комплексного сопряжения.
Положение максимума корреляционной функции  в выражении (1) по сигналу PSS определяет границу кадра eNB и является начальной оценкой времени прихода сигнала ТОА
в выражении (1) по сигналу PSS определяет границу кадра eNB и является начальной оценкой времени прихода сигнала ТОА  Данная оценка выражается целым числом отсчетов n с минимальной частотой дискретизации ƒss=1,92 МГц, на которое нужно сдвинуть начало блока обработки, чтобы его границы были совмещены с границей кадра LTE (см. Фокин Г.А., Волгушев Д.Б. Использование SDR-технологии для задач сетевого позиционирования. Модели приема и обработки опорных сигналов LTE // Вестник СибГУТИ. 2022. №3 (59). С. 62-83).
Данная оценка выражается целым числом отсчетов n с минимальной частотой дискретизации ƒss=1,92 МГц, на которое нужно сдвинуть начало блока обработки, чтобы его границы были совмещены с границей кадра LTE (см. Фокин Г.А., Волгушев Д.Б. Использование SDR-технологии для задач сетевого позиционирования. Модели приема и обработки опорных сигналов LTE // Вестник СибГУТИ. 2022. №3 (59). С. 62-83).
Обработка первичного сигнала синхронизации PSS на первом этапе поиска опорных сигналов в предлагаемом способе ведется блоками по два субкадра. Дополнительно по первичным сигналам синхронизации PSS выполняется грубая оценка частотной расстройки  для этого СФ по опорному сигналу PSS разбивается на два сегмента равной длинны: сегмент
для этого СФ по опорному сигналу PSS разбивается на два сегмента равной длинны: сегмент  в выражении (2) с индексами m=0, …, NPSS/2-1 и сегмент
в выражении (2) с индексами m=0, …, NPSS/2-1 и сегмент  в выражении (3) с индексами m=NPSS/2, …, NPSS. Разница фаз пиков корреляции двух сегментов пропорциональна грубой частотной расстройке
в выражении (3) с индексами m=NPSS/2, …, NPSS. Разница фаз пиков корреляции двух сегментов пропорциональна грубой частотной расстройке 
Согласно выражению (4) для каждого сигнала PSS сохраняются те временные индексы  для которых значения КФ
для которых значения КФ  превышают порог детектирования δРа по средней мощности. Значения индексов в списке
превышают порог детектирования δРа по средней мощности. Значения индексов в списке  являются потенциальными оценками положения границы кадра, т.е. представляют собой грубую оценку времени прихода сигнала
являются потенциальными оценками положения границы кадра, т.е. представляют собой грубую оценку времени прихода сигнала  Каждое из значений в списке
Каждое из значений в списке  используется для дальнейшего поиска сигнала вторичной синхронизации SSS; значения индексов в списке
используется для дальнейшего поиска сигнала вторичной синхронизации SSS; значения индексов в списке  , при которых сигнал SSS обнаружен не был, отбрасываются. Оценка частотного сдвига
, при которых сигнал SSS обнаружен не был, отбрасываются. Оценка частотного сдвига  по сигналу PSS выполняется следующим образом:
по сигналу PSS выполняется следующим образом:

где m - временной индекс из списка 
Результатом работы модуля детектирования PSS является список  индексов возможного положения границы кадра
индексов возможного положения границы кадра  список
список  оценок частотного сдвига
оценок частотного сдвига  для соответствующих индексов из
для соответствующих индексов из  и список идентификаторов Nid2, обнаруженных по трем PSS; i-й идентификатор соты внутри группы Nid2 считается обнаруженным, если список
и список идентификаторов Nid2, обнаруженных по трем PSS; i-й идентификатор соты внутри группы Nid2 считается обнаруженным, если список  не пустой.
не пустой.
Детектирование SSS осуществляется в частотной области. Перед этим сначала выполняется корректировка окна быстрого преобразования Фурье (БПФ) по возможному положению границы кадра  для каждого положения сигнала PSS из списка
для каждого положения сигнала PSS из списка  После выделения отсчетов сигнала SSS из общего блока принятых отсчетов производится компенсация частотной расстройки
После выделения отсчетов сигнала SSS из общего блока принятых отсчетов производится компенсация частотной расстройки  по оценке из списка
по оценке из списка  во временной области согласно:
во временной области согласно:

После БПФ для каждого положения сигнала PSS из списка  вычисляются 168 корреляционных функций по сигналам SSS для 0-го субкадра и 168 КФ по сигналам SSS для 5-го субкадра в частотной области:
вычисляются 168 корреляционных функций по сигналам SSS для 0-го субкадра и 168 КФ по сигналам SSS для 5-го субкадра в частотной области:

где Rss=FFT(rSSc) - отсчеты принятого сигнала в полосе 1,4 МГц, соответствующие вторичному сигналу синхронизации SSS в частотной области; FfT(-) оператор быстрого преобразования Фурье (БПФ, FFT - Fast Fourier Transform); j=0, 1, …, 167 - номер сигнала SSS; Nsss=128 - длина выборки сигнала SSS, равная 128 отсчетам;  - комплексно сопряженные отсчеты j - го сигнала SSS в частотной области;
- комплексно сопряженные отсчеты j - го сигнала SSS в частотной области;  - корреляция по j-му SSS.
- корреляция по j-му SSS.
Полученные корреляции (КФ) сравниваются с порогом; значения КФ, превысившие порог, и соответствующие им индексы (от 0 до 167) сохраняются в сортированные по убыванию значения корреляции списки.
Таким образом, на выходе модуля детектирования SSS формируется два списка (для 0-го и 5-го субкадра) с номерами обнаруженных сигналов SSS для всех положений обнаруженных сигналов PSS. Параллельно поддерживаются списки значений корреляции по сигналам SSS и списки номеров сигналов PSS, при которых были обнаружены сигналы SSS. Из всех списков при покадровой обработке удаляются повторяющиеся значения. Максимальные значения корреляции по сигналу SSS для 0-го и 5-го субкадра сравниваются для вынесения решения о том, какой субкадр принимается в данный момент.
После детектирования PSS и SSS для всех пар PSS и SSS вычисляются идентификаторы сот CellID по формуле  а также сохраняются соответствующие значения индексов положения границы кадра
а также сохраняются соответствующие значения индексов положения границы кадра  т.е. грубые оценки временной расстройки
т.е. грубые оценки временной расстройки  а также оценки частотной расстройки
а также оценки частотной расстройки  из списка
из списка  Полученные значения грубой оценки временной расстройки
Полученные значения грубой оценки временной расстройки  используются для корректировки окна БПФ как на этапе поиска опорных сигналов синхронизации с минимальной частотой дискретизации ƒss=1,92 МГц, так и на этапе подстройки к опорным сигналам сот с максимальной частотой дискретизации ƒs=30,72 МГц согласно схеме на фиг. 2.
используются для корректировки окна БПФ как на этапе поиска опорных сигналов синхронизации с минимальной частотой дискретизации ƒss=1,92 МГц, так и на этапе подстройки к опорным сигналам сот с максимальной частотой дискретизации ƒs=30,72 МГц согласно схеме на фиг. 2.
Во втором модуле подстройки к опорным сигналам LTE (фиг. 2) после корректировки окна БПФ и предварительного уточнения захвата по частоте  во временной области и компенсации временной расстройки с учетом уточненного времени прихода
во временной области и компенсации временной расстройки с учетом уточненного времени прихода  в частотной области, выполняют преобразование выборок принятого сигнала r в частотно-временную структуру кадра для последующего извлечения опорных сигналов сот CRS, передаваемых в более широкой полосе частот, по сравнению с сигналами первичной и вторичной синхронизации, по которым и реализуют уточнение захвата по частоте
в частотной области, выполняют преобразование выборок принятого сигнала r в частотно-временную структуру кадра для последующего извлечения опорных сигналов сот CRS, передаваемых в более широкой полосе частот, по сравнению с сигналами первичной и вторичной синхронизации, по которым и реализуют уточнение захвата по частоте  и времени прихода
и времени прихода  В отличие от обработки в модуле поиска, компенсация временной и частотной расстройки в модуле подстройки выполняется уже для каждой конкретной eNB.
В отличие от обработки в модуле поиска, компенсация временной и частотной расстройки в модуле подстройки выполняется уже для каждой конкретной eNB.
В результате покадровой обработки сигналов CRS структура каждой базовой станции eNB дополняется счетчиком числа ее обнаружений. При этом в список обнаруженных eNB попадают только те базовые станции, которые в радиоэфире обнаруживаются регулярно. Нерегулярность обнаружений обусловлена ложными срабатываниями по критерию сравнения КФ с эмпирически подобранным порогом в (4). eNB считается обнаруженной, если она детектируется по критерию (4) не менее 50% от всех попыток обнаружения eNB в процессе обработки принятых из радиоэфира сигналов. Сигналы CRS, обнаруженные по данному критерию, используются для дальнейшей обработки при подстройке.
Структура каждой базовой станции eNB характеризуется следующими параметрами, которые могут обновляться в процессе работы процедур приема и обработки: CellID идентификатор соты eNB; величина грубой временной расстройки  в количестве отсчетов, начальное значение которой получается из списка
в количестве отсчетов, начальное значение которой получается из списка  величина частотной расстройки
величина частотной расстройки  в рад/с относительно частоты дискретизации ƒs, начальное значение которой
в рад/с относительно частоты дискретизации ƒs, начальное значение которой  получается из списка
получается из списка  и далее обновляется по сигналам CRS; значения дробной временной расстройки ΔtCRS и уточненной частотной расстройки ΔƒCRS обновляются по сигналам CRS на выходе петлевого фильтра (ПФ) с учетом числа обнаружений eNB и метрики RSRQ по оценке качества приема в дБ для исключения ложных срабатываний по опорным сигналам сот CRS.
и далее обновляется по сигналам CRS; значения дробной временной расстройки ΔtCRS и уточненной частотной расстройки ΔƒCRS обновляются по сигналам CRS на выходе петлевого фильтра (ПФ) с учетом числа обнаружений eNB и метрики RSRQ по оценке качества приема в дБ для исключения ложных срабатываний по опорным сигналам сот CRS.
Уточненная временная  и частотная
и частотная  подстройки выполняются по опорным сигналам CRS для каждой обнаруженной базовой станции eNB, при этом обработка ведется в частотной области в рабочей полосе частот ΔF с максимальной частотой дискретизации ƒs=30,72 МГц.
подстройки выполняются по опорным сигналам CRS для каждой обнаруженной базовой станции eNB, при этом обработка ведется в частотной области в рабочей полосе частот ΔF с максимальной частотой дискретизации ƒs=30,72 МГц.
Блок обработки на этапе подстройки составляет два субкадра стандарта LTE. Границы блока обработки определяются значением  с учетом коэффициента масштабирования cbw параметров приемника для заданной полосы. Коэффициент cbw необходимо учитывать при переводе параметров, вычисленных в домене минимальной частоты дискретизации ƒss=1,92 МГц, в домен обработки на полной частоте дискретизации, которая, в свою очередь, определяется рабочей полосой частот ΔF.
с учетом коэффициента масштабирования cbw параметров приемника для заданной полосы. Коэффициент cbw необходимо учитывать при переводе параметров, вычисленных в домене минимальной частоты дискретизации ƒss=1,92 МГц, в домен обработки на полной частоте дискретизации, которая, в свою очередь, определяется рабочей полосой частот ΔF.
Коэффициент  определяется как отношение размера FFT NFFT для полной полосы ΔF к размеру FFT для обработки PSS и
определяется как отношение размера FFT NFFT для полной полосы ΔF к размеру FFT для обработки PSS и  в полосе 1,4 МГц (см. Фокин Г.А., Волгушев Д.Б. Использование SDR-технологии для задач сетевого позиционирования. Модели приема и обработки опорных сигналов LTE // Вестник СибГУТИ. 2022. №3 (59). С. 62-83).
в полосе 1,4 МГц (см. Фокин Г.А., Волгушев Д.Б. Использование SDR-технологии для задач сетевого позиционирования. Модели приема и обработки опорных сигналов LTE // Вестник СибГУТИ. 2022. №3 (59). С. 62-83).
Первым этапом обработки CRS после БПФ является OFDM демодуляция блока, которая заключается в разбиении этого блока на отдельные OFDM символы; в результате формируется сетка ресурсных элементов из принятых OFDM символов одного блока обработки. Дальнейшая обработка ведется блоками, равными одному субкадру стандарта LTE. Для каждого OFDM символа в частотной области проводится компенсация уточненной временной задержки  с учетом дробной расстройки ΔtCRS согласно выражению:
с учетом дробной расстройки ΔtCRS согласно выражению:

где k - номер поднесущей в OFDM символе; R(k) - k-я поднесущая принятого OFDM символа; Rc(k) - k-я поднесущая принятого OFDM символа после компенсации дробной временной расстройки ΔtCRS;  - уточненная временная задержка, учитывающая дробную расстройку ΔtCRS, измеряется в долях отсчета; NFFT - размер FFT, определяется рабочей полосой частот ΔF.
- уточненная временная задержка, учитывающая дробную расстройку ΔtCRS, измеряется в долях отсчета; NFFT - размер FFT, определяется рабочей полосой частот ΔF.
По известным идентификаторам CellID и текущему номеру субкадра в процессе обработки формируется последовательность отсчетов опорных CRS символов, а также выделяются CRS символы из сетки принятых OFDM символов.
Оценка уточненной частотной расстройки ΔƒCRS вычисляется как средняя разница фазовых расстроек поднесущих двух CRS символов с одинаковыми номерами в соседних слотах, т.е. символов CRS, которые располагаются в одинаковых позициях в соседних слотах согласно выражениям:
где k - номер поднесущей в OFDM символе; RCRS(k) - k-я поднесущая принятого CRS символа; SCRS(k) - k-я поднесущая опорного CRS символа; hCRS(k) - комплексное умножение принятой и опорной k-й поднесущей CRS символа, которое позволяет определить разность фазы k-й поднесущей приятого CRS символа относительно k-й поднесущей опорного CRS символа; S0 и S1 - индексы номера слота;  - индексы CRS поднесущих в OFDM символе; NCRS - число активных поднесущих в CRS символе; NFFT - размер FFT в рабочей полосой частот ΔF; NCP0 - длина циклического префикса (ЦП) 0-го OFDM символа в слоте; NCP - длина ЦП остальных OFDM символов в слоте.
- индексы CRS поднесущих в OFDM символе; NCRS - число активных поднесущих в CRS символе; NFFT - размер FFT в рабочей полосой частот ΔF; NCP0 - длина циклического префикса (ЦП) 0-го OFDM символа в слоте; NCP - длина ЦП остальных OFDM символов в слоте.
Полученная оценка частотной расстройки ΔƒCRS подается на петлевой фильтр (ПФ) 1-го порядка для плавного отслеживания частотной расстройки 

где m - индекс итерации подстройки; α=0,08 коэффициент ПФ, выбранный эмпирически.
Оценка дробной временной расстройки ΔtCRS вычисляется как среднее значение разницы фаз двух соседних поднесущих в одном CRS/PRS символе согласно выражению:

где ΔNFFT=6 - число поднесущих между соседними активными поднесущими CRS символа. В формуле (12) представлено вычисление ΔtCRS для 0-го слота субкадра. Для 1-го слота субкадра выполняются вычисления, аналогичные (12); итоговая оценка дробной временной расстройки ΔtCRS получается в результате усреднения по двум слотам.
Полученная оценка дробной временной расстройки ΔtCRS подается на ПФ 2-го порядка для плавного отслеживания уточненной временной задержки  согласно выражениям:
согласно выражениям:

где m - индекс итерации подстройки; αр и αi - коэффициенты ПФ, подобраны эмпирически.
Итоговая оценка задержки времени прихода сигнала t для каждой базовой станции eNBi определяется суммой текущих оценок грубой  и уточненной
и уточненной  временной задержки:
временной задержки:

где  грубая оценка временной задержки, выполненная по PSS согласно формулам (1)-(4) в модуле поиска опорных сигналов LTE (фиг. 2); cbw - коэффициент масштабирования параметров приемника для заданной рабочей полосы, необходим для пересчета
грубая оценка временной задержки, выполненная по PSS согласно формулам (1)-(4) в модуле поиска опорных сигналов LTE (фиг. 2); cbw - коэффициент масштабирования параметров приемника для заданной рабочей полосы, необходим для пересчета  из домена полосы 1,4 МГц сигналов PSS и SSS с частотой дискретизации ƒss=1,92 МГц в домен рабочей полосы частот ΔF с частотой дискретизации ƒs;
из домена полосы 1,4 МГц сигналов PSS и SSS с частотой дискретизации ƒss=1,92 МГц в домен рабочей полосы частот ΔF с частотой дискретизации ƒs;  - уточненная оценка временной задержки по сигналам CRS, полученная согласно формулам (12)-(14); ƒs - частота дискретизации для рабочей полосы частот ΔF.
- уточненная оценка временной задержки по сигналам CRS, полученная согласно формулам (12)-(14); ƒs - частота дискретизации для рабочей полосы частот ΔF.
Оценка качества приема RSRQ (Reference Signal Received Quality) опорных сигналов в рабочей полосе частот ΔF выполняется по опорным сигналам соты CRS и представляет собой выраженное в дБ отношение мощности КФ по CRS символу к средней мощности принятого в ресурсном элементе CRS символа из множества  индексов CRS поднесущих в OFDM символе:
индексов CRS поднесущих в OFDM символе:

где hCRS(k) - комплексное произведение согласно выражению (10);  - индексы CRS поднесущих в OFDM символе; RCRS(k) - k-я поднесущая принятого OFDM символа.
- индексы CRS поднесущих в OFDM символе; RCRS(k) - k-я поднесущая принятого OFDM символа.
В формировании набора первичных измерений наблюдаемых разностей времен прихода сигналов Δt21=t2-t1, Δt31=t3-t1, …, ΔtN1=tN-t1 от i=2, …, N обнаруженных базовых станций eNBi относительно опорной eNB1 участвуют только те базовые станции eNB, значение параметра RSRQ которых превышает заданный порог.
Экспериментальная апробация заявленного способа показала достижение дециметровой точности оценок координат с частотой до 100 Гц (за интервал передачи одного кадра длительностью 10 мс) по доступным в радиоэфире синхронно излучаемым опорным сигналам стандарта LTE, что указывает на возможность достижения заявленного технического результата.
Изобретение относится к радиотехнике. Технический результат заключается в повышении точности и скорости определения пространственных координат подвижного устройства, работающего по технологии программно-конфигурируемого радио, которое может не являться абонентом сотовых сетей LTE, в условиях отсутствия сигналов глобальных навигационных спутниковых систем. Такой результат достигается тем, что на приемном устройстве программноконфигурируемого радио осуществляют захват из радиоэфира радиосигнала LTE на известной несущей центральной частоте, его перенос в область информационных частот и дискретизацию с известной шириной полосы частот, затем выполняют обнаружение и подстройку к доступным в радиоэфире сигналам первичной синхронизации, далее реализуют обнаружение и подстройку к доступным в радиоэфире сигналам вторичной синхронизации, затем выполняют определение идентификаторов сот по принятым из радиоэфира сигналам первичной и вторичной синхронизации обнаруженных базовых станций, далее для всех установленных идентификаторов сот базовых станций реализуют грубую оценку времени прихода и сдвига частоты по принятым сигналам LTE для начальной кадровой синхронизации путем вычисления корреляционных функций принятого сигнала с локальными копиями опорных сигналов первичной и вторичной синхронизации, затем выполняют преобразование выборок принятого сигнала в частотно-временную структуру кадра для последующего извлечения опорных сигналов сот, далее реализуют уточнение захвата и извлечение параметров времени прихода по опорным сигналам сот, передаваемым в более широкой полосе частот, по сравнению с сигналами первичной и вторичной синхронизации, затем выполняют подстройку и отслеживание кратковременных первичных измерений времени прихода сигнала, далее осуществляют сбор измерений наблюдаемой разности времен прихода сигналов, затем выполняют получение координат базовых станций и в заключение производят вторичную обработку первичных измерений наблюдаемой разности времен прихода сигналов одним из способов гиперболического позиционирования с результирующей оценкой координат устройства, при этом процедура грубой оценки временной и частотной расстройки реализуется на этапе поиска через параметр разницы фаз пиков корреляции двух равных сегментов сигнала первичной синхронизации на интервале передачи одного кадра стандарта LTE. 2 ил.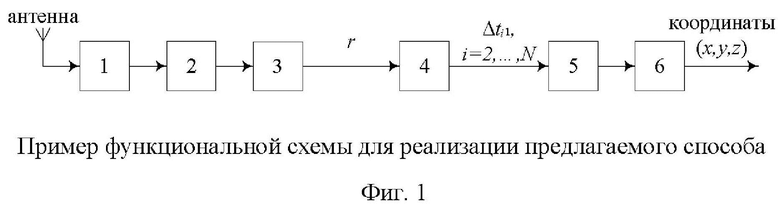
Способ позиционирования в сетях связи с использованием технологии программно-конфигурируемого радио, заключающийся в том, что на приемном устройстве программно-конфигурируемого радио осуществляют захват из радиоэфира радиосигнала LTE на известной несущей центральной частоте, его перенос в область информационных частот и дискретизацию с известной шириной полосы частот, затем выполняют обнаружение и подстройку к доступным в радиоэфире сигналам первичной синхронизации, далее реализуют обнаружение и подстройку к доступным в радиоэфире сигналам вторичной синхронизации, затем выполняют определение идентификаторов сот по принятым из радиоэфира сигналам первичной и вторичной синхронизации обнаруженных базовых станций, далее для всех установленных идентификаторов сот базовых станций реализуют грубую оценку времени прихода и сдвига частоты по принятым сигналам LTE для начальной кадровой синхронизации путем вычисления корреляционных функций принятого сигнала с локальными копиями опорных сигналов первичной и вторичной синхронизации, затем выполняют преобразование выборок принятого сигнала в частотно-временную структуру кадра для последующего извлечения опорных сигналов сот, далее реализуют уточнение захвата и извлечение параметров времени прихода по опорным сигналам сот, передаваемым в более широкой полосе частот, по сравнению с сигналами первичной и вторичной синхронизации, затем выполняют подстройку и отслеживание кратковременных первичных измерений времени прихода сигнала, далее осуществляют сбор измерений наблюдаемой разности времен прихода сигналов, затем выполняют получение координат базовых станций и в заключение производят вторичную обработку первичных измерений наблюдаемой разности времен прихода сигналов одним из способов гиперболического позиционирования с результирующей оценкой координат устройства, отличающийся тем, что обработка сигналов первичной и вторичной синхронизации на этапе поиска ведется в одной ветви приемника, которая работает на минимальной для стандарта LTE частоте дискретизации, а параллельная обработка на этапе подстройки по опорным сигналам сот ведется в другой ветви приемника, которая работает на максимальной для стандарта LTE частоте дискретизации; грубая оценка временной и частотной расстройки вычисляется на этапе поиска через параметр разницы фаз пиков корреляции двух равных сегментов сигнала первичной синхронизации на интервале передачи одного кадра стандарта LTE; перед детектированием сигналов вторичной синхронизации на этапе поиска и перед обработкой опорных сигналов сот на этапе подстройки выполняется предварительная корректировка окна быстрого преобразования Фурье на основе грубой оценки временной расстройки, полученной из корреляции по сигналу первичной синхронизации; при покадровой обработке списки обнаруженных сигналов первичной и вторичной синхронизации актуализируются путем сравнения пиков корреляционных функций с заданным порогом, что позволяет на минимальной частоте дискретизации оперативно корректировать список идентификаторов обнаруженных сот на этапе поиска, в котором остаются только те базовые станции, идентификаторы которых обнаруживаются регулярно на интервале нескольких кадров, и, таким образом, минимизировать время обработки опорных сигналов сот на максимальной частоте дискретизации на этапе подстройки; при извлечении параметров времени прихода по опорным сигналам сот на интервале каждого кадра дополнительно выполняют оценку качества приема опорных сигналов сот через вычисление отношения мощности их корреляционной функции к средней мощности принятого в ресурсном элементе их символа, что позволяет при формировании набора первичных измерений разности дальности оставлять только базовые станции, значение параметра качества приема которых превышает заданный порог, что позволяет минимизировать ложные срабатывания.
| Способ восстановления спиралей из вольфрамовой проволоки для электрических ламп накаливания, наполненных газом | 1924 |
|
SU2020A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПО DL-OTDOA (НАБЛЮДАЕМЫМ РАЗЛИЧИЯМ ВО ВРЕМЕНИ ПРИБЫТИЯ В НИСХОДЯЩЕЙ ЛИНИИ СВЯЗИ) В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ LTE (ДОЛГОСРОЧНОГО РАЗВИТИЯ) | 2009 |
|
RU2510157C2 |
| ИНФОРМАЦИЯ О МЕСТОПОЛОЖЕНИИ В СЕТЯХ СВЯЗИ | 2015 |
|
RU2704618C2 |

