Изобретение относится к способу управления движением кормосмесительной тележки с признаками п. 1 формулы изобретения. Помимо этого изобретение относится к кормосмесительной тележке по п. 13 формулы изобретения для осуществления этого способа.
Автономная кормосмесительная тележка по существу включает в себя:
- автономную перемещаемую и управляемую ходовую часть,
- рабочие органы в виде приводного двигателя, привода движения, смесительного резервуара, выпускного устройства для кормовых средств, взвешивающего устройства для подлежащего приему количества корма и системы рулевого управления для ходовой части,
- смесительный резервуар, выпускное устройство для кормовых средств, и взвешивающее устройство для подлежащего приему количества корма,
- по меньшей мере один сканер и/или датчик для определения данных,
- по меньшей мере одно взаимодействующее со сканерами и/или датчиками вычислительное устройство.
Автономные транспортные средства применяются в различных областях техники. В этой связи указывается, например, на сельскохозяйственные транспортные средства из области техники для кормления, прежде всего на кормосмесительные тележки. Такие кормосмесительные тележки в дополнение к уже названным агрегатам содержат, как правило, смесительный резервуар, выпускное устройство для кормовых средств, а также взвешивающее устройство для подлежащего приему количества корма. Наряду с сельскохозяйственными транспортными средствами для кормления, изобретение без ограничений может быть использовано также в применяемых в области логистики транспортных средствах или в автономных транспортных средствах для пассажирских перевозок.
В последующем, в качестве примера автономного транспортного средства описывается кормосмесительная тележка. Перерабатываемый и/или транспортируемый кормосмесительной тележкой материал называется кормом.
В то время как в сфере содержания свиней и птицы с большими поголовьями животных применяют, как правило, стационарные автоматические способы и установки, из сферы содержания молочного и крупного рогатого скота известны базирующиеся на транспортных средствах автоматизированные способы кормления, при которых все рабочие операции от выемки корма из хранилищ и составления предварительно заданной кормовой смеси вплоть до раскладывания корма в кормовой проход выполняют автономно.
При навигации транспортного средства, то есть при передвижении автономного транспортного средства к хранилищу, месту кормления и т.д., для проводки в колее рассматриваются, например, следующие технологии:
- индуктивная: колея движения задается посредством одной или нескольких проволочных петель, через которые протекает электрический ток, в полу или на полу и распознается на транспортном средстве с помощью антенн(ы),
- оптическая: камеры или подобные сенсорные устройства, например лазерные сенсорные устройства, которые инсталлированы на транспортном средстве, собирают данные об окружающей среде, которые используются для управления транспортным средством,
- виртуальная: транспортное средство проводится вдоль виртуальной направляющей линии с помощью системы определения позиции, например GPS-системы.
Описанные технологии проводки в колее частично также комбинируют друг с другом. Например, навигацию автономного транспортного средства или же кормосмесительной тележки до кормохранилища, которое представляет собой, например, вытянутое вдоль силосохранилище малой высоты, можно осуществлять с помощью GPS-системы, а внутри кормохранилища - с помощью оптической системы.
Именно для кормления крупного рогатого скота известны системы, в которых кормовые средства сначала приготавливают на так называемой кормокухне и оттуда автоматически отбирают и, например, с помощью конвейерной ленты или системы с подвесными корзинами подают подлежащим кормлению животным. Эти системы обладают недостатком, состоящим в том, что для приготовления кормовых средств на кормокухне необходимо обращаться к неавтономным способам, таким как, например, выемка силосных тюков с помощью известного измельчителя блоков с U-образной рамой.
Альтернативно этому известен также способ кормления, при котором на известных самих по себе, управляемых оператором кормосмесительных тележках ручные работы по обслуживанию от выемки корма из силосохранилища малой высоты вплоть до раскладывания корма частично (системы содействия управлению) или даже полностью (автономные системы) управляются независимо от оператора.
Из US 2010/063680 А1 известны способ управления автономным транспортным средством и соответствующее транспортное средство. При этом оператор сначала выбирает путь и в ответ на это транспортное средство реализует этот путь. Актуальные данные об окружающей среде и позицию местонахождения транспортного средства постоянно регистрируют с помощью соответствующих датчиков и сравнивают с предварительно заданным путем. В качестве датчиков предлагаются двухмерные или же трехмерные лидарные системы, которыми вырабатываются двух- или трехмерные данные о пространстве. За счет этого или двухмерные наборы данных о разных пространственных плоскостях перерабатывают в трехмерный контур пространства, или с помощью подходящих трехмерных лидарных систем собирают непосредственно трехмерные данные об окружающей среде. Выработанные опосредованно или определенные непосредственно трехмерные данные об окружающей среде можно сравнивать с предварительно заданными структурами, например с препятствиями, и использовать для генерирования команд управления. Таким образом, предварительно заданный сначала участок пути, при необходимости, корректируется транспортным средством автономно.
Недостатком в данной системе является высокая производительность вычислений, которая необходима для переработки трехмерных данных независимо от того, были ли это трехмерные данные получены с помощью двухмерных или трехмерных систем.
Помимо этого, из изданного Федеральным агентством по сельскому хозяйству и продовольствию протокола „Innovationstage 2014 - Neue Ideen für Markt" (Дни инноваций 2014 г. - новые идеи для рынка) от 15 октября 2014 г., ХР055287426, Бонн, стр. 101, известна кормосмесительная тележка, в которой для навигации и составления карт (simultaneous localization and mapping - одновременная локация и составление карты) применены лазерные сканеры. При этом во время фазы составления карты (mapping) образуется непосредственно двухмерная карта.
Из DE 102012107508 В3 известен способ, при котором для приема корма из хранилища кормосмесительную тележку сначала направляют к предварительно заданной растровой точке силосохранилища малой высоты. Из этой растровой точки с помощью по меньшей мере одного сканера и/или датчика определяют данные о позиции и/или качестве извлекаемого из силосохранилища малой высоты кормового средства. Снятие данных осуществляют или с предусмотренной для выемки боковой поверхности силоса, или с уже имеющейся заборной поверхности.
Данные о позиции и/или качестве передают на вычислительное устройство кормосмесительной тележки и используют для установления приоритетного места выемки. Приоритетное место выемки представляет собой точку, от которой должна быть начата выемка корма из соответствующего хранилища.
Для того чтобы выразиться яснее, что названное в DE 102012107508 В3 место выемки представляет собой установленную в направлениях X, Y и Z точку, от которой начинается процесс выемки, в дальнейшем такое место выемки называется стартовой точкой выемки.
После определения стартовой точки выемки кормосмесительная тележка автономно направляется к этой стартовой точке и принимает там подлежащий погрузке корм. Недостатком в предложенном способе является то, что определяемые датчиком данные о качестве и/или позиции извлекаемых кормовых средств могут быть искажены под влиянием различных, а также изменяющихся краевых условий, вызываемых, например, различными погодными условиями, такими как дождь, туман или метель.
Помимо этого, фиксация растровой точки перед силосным сооружением малой высоты может привести к проблемам, так как при продолжающейся выемке кормовых средств из этого силосохранилища расстояние в силосохранилище малой высоты между растровой точкой и заборной поверхностью увеличивается. Прежде всего, при воздействии названных погодных возмущающих величин возрастающее расстояние может негативно влиять на определение данных с помощью предусмотренных для этого датчиков.
Из ЕР 2232982 А1 известны машина и способ резки силосной массы, которые в состоянии действовать в значительной мере автономно. С этой целью для выемки силосной массы из хранилища предусмотрены циклы выемки. При первом цикле выемки машина сначала управляется оператором вручную. Для этого кормосмесительную тележку приводят в позицию, в которой с помощью предусмотренного на кормосмесительной тележке заборного устройства силосную массу вынимают из хранилища и подают в тоже предусмотренный на кормосмесительной тележке смесительный резервуар. После выполнения первой, управляемой вручную, выемки транспортное средство направляют к предварительно заданному месту расположения. Из этого предварительно заданного места расположения с помощью сканера определяют геометрию заборной поверхности силосной кучи и закладывают в устройство хранения данных. После этого кормосмесительную тележку направляют к местам, в которых должен быть выгружен находящийся в смесительном резервуаре корм.
Первый цикл выемки заканчивают тем, что кормосмесительную тележку направляют в предварительно заданное место расположения, из которого при первом цикле выемки была определена геометрия заборной поверхности силосной кучи.
Второй и все дальнейшие циклы выемки могут быть выполнены автономно. Для этого с помощью сканера сначала снова регистрируют геометрию заборной поверхности. Зарегистрированную таким образом структуру поверхности сравнивают с сохраненным в вычислительном устройстве набором данных ранее зарегистрированной структуры. Если отклонение между обоими отображениями превышает заранее заданное значение, происходит отключение системы и выдается аварийное сообщение. Причиной отклонения может быть, например, то, что в критичной области между кормосмесительной тележкой и заборной поверхностью силосной массы находится посторонний предмет или даже животное или же человек. Оповещенный аварийной сигнализацией оператор может проанализировать причину сбоя, устранить ее и запустить систему снова.
Недостатком в этой системе и в этом автономном транспортном средстве является то, что интеллект системы не достаточен для того, чтобы проанализировать причину сбоя настолько, чтобы продолжить работу машины без ручного вмешательства оператора.
Задача изобретения состоит в том, чтобы предложить способ, который совершенствует автономный принцип работы транспортного средства. Помимо этого, задача изобретения состоит в том, чтобы предложить автономное транспортное средство, прежде всего кормосмесительную тележку, которая включает в себя средства для совершенствования автономного принципа работы.
Данная задача решена посредством способа с признаками п. 1 формулы изобретения.
Для описания способа согласно изобретению в последующем различают три вида находящихся в окружающем пространстве автономного транспортного средства объектов:
- неподвижные, статичные объекты, такие как, например, здание, кирпичные стены, деревья,
- подвижные, динамичные объекты, такие как, например, машины, транспортные средства, животные, люди,
- переменные объекты, такие как передвижные стенки, двери, кучи корма.
Для осуществления способа согласно изобретению сканером и/или другим датчиком собирают данные об окружающей среде. Из собранных данных об окружающей среде вычислительное устройство определяет трехмерное и состоящее из отдельных точек облако точек, отображающее окружающую среду, причем положение отдельных точек задано координатами соответствующих точек. Облаком точек отображаются полученные к определенному моменту времени отдельные точки обнаруженных сканером и/или датчиком статичных, динамичных или переменных объектов.
На базе трехмерных данных в предварительно заданной плоскости слоя определяют двухмерный набор данных.
Позиция места расположения автономного транспортного средства в текущий момент времени определяется в вычислительном устройстве как стартовая точка. Вычислительным устройством определяется путь движения между стартовой точкой и предварительно заданной целевой точкой. Помимо этого, в вычислительном устройстве предварительно заданы параметры, такие как, например, геометрия автономного транспортного средства. Другие параметры могут относиться, например, к поверхности грунта, по которому выполнятся движение, так что, например, возможно имеющиеся неровности, такие как, например, выбоины в грунте или бордюрные кромки, могут быть проверены на допустимость движения по ним. Для такой проверки предварительно заданные в вычислительном устройстве параметры сравниваются с отображающим окружающую среду облаком точек. Помимо этого, в вычислительном устройстве предварительно заданы критерии, например минимальные расстояния, которые дают возможность корректировки определенного пути движения во вновь рассчитанный путь движения.
В результате при использовании способа согласно изобретению автономное транспортное средство в состоянии автономно адаптировать предусмотренный путь движения к ситуативным требованиям или же установить новый путь движения к целевой точке и задать его управляющим и приводным агрегатам. Таким образом, автономное транспортное средство не только в состоянии автономно отрабатывать отдельные рабочие процессы, более того оно обладает собственным интеллектом, с помощью которого предусмотренные рабочие процессы являются адаптируемыми при ситуативно изменяющихся краевых условиях.
В предпочтительной форме осуществления способа согласно изобретению в вычислительном устройстве заложена статичная трехмерная карта (в последующем 3D-карта) области применения автономного транспортного средства. Эта 3D-карта заложена в вычислительном устройстве, преимущественным образом, в специальном слое (layer) или же плоскости пласта.
Под слоем или же пластом здесь, в последующем, понимается двух- или трехмерная библиотека данных или же отображение такой библиотеки данных в вычислительном устройстве.
На статичной 3D-карте записаны данные о геометрии всех статичных объектов, например зданий, возможных ограничительных кирпичных стен хранилищ, а также деревьев. Области, в которых имеются такие устойчивые сооружения, задаются в вычислительном устройстве, преимущественным образом с указанием подлежащего определению безопасного расстояния, как не доступные для движения области. Наоборот, оставшиеся области могут быть заданы как принципиально доступные для движения.
Определение позиции или же локализация текущей позиции автономного транспортного средства осуществляется, преимущественным образом, посредством сравнения полученных с помощью сканера и/или датчика действительных данных об окружающей среде с заложенной в вычислительном устройстве статичной 3D-картой. При этом в вычислительном устройстве предусмотрены процессы, при которых заснятые действительные объекты сравниваются с записанными на 3D-карте объектами. Если, например, вычислительное устройство идентифицирует в заснятых на базе сканера или датчика данных о пространстве на расстоянии 10 м объемную структуру, которая идентична записанной на статичной 3D-карте объемной структуре, например зданию, то в выводе от противного может быть установлено, что текущая позиция автономного транспортного средства удалена на 10 м от заданной в статичной карте позиции здания.
Локализация объекта принципиально возможна также тогда, когда карта действительного состояния составлена с помощью только системы двухмерного сканирования, однако, если определение действительных данных осуществлено на базе системы трехмерного сканирования, то локализация будет точнее и более однозначной. Альтернативно системе трехмерного сканирования может быть предусмотрена система двухмерного сканирования, которая модифицирована в том отношении, что она опосредованно выдает трехмерные данные. Для этой цели двухмерный сканер приводится, как это еще будет описано в последующем, в поворотное движение.
Локализация автономного транспортного средства на базе системы трехмерного или модифицированного двухмерного сканирования отличается высокой точностью и дает возможность, например при неровных областях движения, таких как, прежде всего, поверхности двора, лучшей компенсации вытекающих из этого неточностей.
Альтернативно, для локализации автономного транспортного средства с применением сканера принципиально возможно определение позиции также иначе, например с помощью GPS-системы, или посредством проложенного в грунте индукционного кабеля, или посредством датчиков.
В предпочтительной форме осуществления способа согласно изобретению статичные трехмерные данные о пространстве сжимают до поверхности и, преимущественным образом, сохраняют в вычислительном устройстве в отдельной плоскости слоя. Для этого в пространственной системе координат X-Y-Z все координаты Z статичных объектов проектируют на плоскость X-Y. Плоскость X-Y ориентируют, преимущественным образом, горизонтально. Таким образом, спроецированные на плоскость X-Y координаты Z статичных объектов более не заданы в отношении их позиции по высоте. Для навигации автономного транспортного средства этого, как правило, достаточно. При этом преимуществом является то, что управление автономным транспортным средством и его навигация при применении статичной 20-карты с предварительно заданной в ней областью движения заметно снижает требования к производительности вычислительного устройства.
Таким образом, определенные сканером и/или по меньшей мере одним датчиком трехмерные действительные данные или же получающуюся отсюда карту действительного состояния сопоставляют со статичной картой, которая, преимущественным образом, сжата до двухмерной плоскости. Следовательно, предусмотренный на базе статичной 20-карты путь движения или доступная для движения область движения является сравниваемыми с действительной ситуацией. Можно проверить, соответствует ли предусмотренный путь движения предварительно заданным и сохраненным в вычислительном устройстве требованиям к доступности для движения или с учетом актуальной действительной ситуации или же карты действительного состояния он не доступен для движения.
Является существенным, что автономное транспортное средство обладает средствами, которые позволяют отобразить текущую позицию автономного транспортного средства на статичной 2D- или 3D-карте, и что предусмотрены процессы управления, с помощью которых автономное транспортное средство является автономно движимым из текущей позиции с учетом возможных мешающих объектов к желаемой целевой позиции. При этом данное движение должно происходить не по точно заданному маршруту, а скорее лишь не должно покидать заданную в качестве предусмотренной области движения площадь. Корректировка запланированного вначале пути движения требуется каждый раз тогда, когда вследствие актуальной действительной ситуации, например стоящего на пути препятствия, запланированный вначале путь движения признается как не доступный для движения.
Является особо предпочтительным, если концепцию способа сформулировать так, что при установлении недоступности для движения предусмотренного пути движения посредством вычислительного устройства автономного транспортного средства на базе заложенной 2D- или 3D-карты определяют альтернативные пути для достижения предусмотренной целевой точки (Z). При этом различные полученные альтернативные пути, при необходимости, могут быть рассмотрены по предварительно заданным критериям, таким как, например, по времени, необходимому для достижения целевой точки. Признанный при этом оптимальным путь движения используют тогда как основу для дальнейшего движения автономного транспортного средства к целевой точке.
Посредством применения трехмерных данных и, прежде всего, посредством сравнения статичной 2D- или 3D-карты с изменяющейся по ситуации трехмерной картой действительного состояния можно с высокой точностью собрать данные о поверхности, такой как, например, о заборной поверхности силосной массы или об имеющихся на предусмотренном пути движения препятствиях, таких как движущиеся машины или люди, и в зависимости от ситуации в целом автономно управлять автономным транспортным средством и продвигать его.
Является особо предпочтительным, если проверку и определение нового пути движения осуществляют непрерывно. Для этой цели по меньшей мере одним сканером и/или датчиком непрерывно определяют данные об окружающей среде и сравнивают в вычислительном устройстве с сохраненными значениями данных.
В предпочтительной форме осуществления способа согласно изобретению в качестве сканера предусмотрен двухмерный лазерный сканер, который является поворачиваемым или же поворачивается на угол Yaw (угол рыскания). Под названным углом рыскания, который в технике называется также как угол крена-
тангажа-рыскания (roll-pitch-yaw angle), следует понимать возможность описания ориентации объекта в трехмерном пространстве. С помощью двухмерного сканера, который вращается на угол рыскания, являются определяемыми двухмерные данные в различных плоскостях, и из двухмерных данных различных плоскостей вращения являются выводимыми трехмерные данные. Такой двухмерный сканер дешевле, чем трехмерный сканер и, если он эксплуатируется описанным образом, предоставляет достаточно хорошие исходные данные, на базе которых окружающая среда является отображаемой трехмерно.
Двухмерный сканер может быть повернут на некий угол относительно плоскости грунта или же плоскости опорной поверхности автономного транспортного средства, так что при повороте на угол рыскания на определенном расстоянии от сканера образуется подобие фокуса. С помощью повернутого таким образом двухмерного сканера можно, прежде всего, идентифицировать отвесные структуры объекта легче, чем ориентированным горизонтально сканером.
В предпочтительной форме осуществления способа на базе трехмерных данных в предварительно заданных плоскостях слоя или же пласта определяют двухмерные наборы данных. Эти виртуальные двухмерные плоскости слоя ориентированы, преимущественным образом, горизонтально. Такой двухмерный набор данных может быть образован, например, для трехмерного пространства, которое является значимым для автономного транспортного средства. Значимой принципиально является область, которую автономное транспортное средство воспринимает как трехмерное тело или же через которую движется как через трехмерное тело. Таким образом, для автономного транспортного средства, которое имеет, например, высоту 3 м, значимыми принципиально являются все препятствия между грунтом и названной высотой.
Для того чтобы установить, является ли предусмотренный путь доступным для движения или нет, достаточно установить, имеется ли на ширине, которая соответствует ширине автономного транспортного средства, препятствие на высоте между грунтом (высота 0) и верхним краем автономного транспортного средства (высота 3 м). Это можно установить посредством того, что все точки пространства между высотой 0 м и высотой 3 м проецируют на двухмерную плоскость. В заключении от противного это означает: если в сжатом двухмерном наборе данных находится точка, то при этом речь идет о точке тела, через которую нельзя переехать, но ее необходимо объехать. Для того чтобы объехать эту точку, необходимо, исходя из названной точки, определить следующую точку находящегося в этом пространстве тела. Если расстояние между обеими точками больше, чем ширина автономного транспортного средства, то между обеими точками находится доступный для движения автономного транспортного средства проезд.
Большое преимущество этой вычислительной операции состоит в том, что не требуется проверять вычислительным устройством трехмерное пространство на его доступность для движения, а на первом этапе все значимые точки между нулевой высотой и предварительно заданным значением проецируют на двухмерную плоскость и затем на втором этапе проверяют доступность для движения внутри этой двухмерной плоскости. За счет сведения трехмерных действительных геометрических данных до двухмерной плоскости слоя количество данных заметно снижается. В результате увеличивают скорость обработки и вместе с ней динамическую адаптацию пути движения.
Хотя принципиально возможен очень точный расчет, который точно подогнан к контуру автономного транспортного средства, тем не менее, несколько более грубый расчет, как правило, с одной стороны, достаточен и, с другой стороны, более прост для обработки вычислительным устройством. Так, небольшие, находящиеся на грунте камни и остатки корма являются несущественными для определения, является ли это место доступным для движения или нет. На этом фоне может быть задан уровень высоты, например на высоте 5 см, ниже которого обнаруженные препятствия задаются как незначимые для доступности движения по маршруту. Таким образом, в этом случае точку на сжатой 2D-карте образуют только препятствия, которые находятся на высоте по меньшей мере 5 см и максимально 3 м. Если на маршруте движения находится, например, материал высотой 7 см, который может представлять собой, прежде всего, остаток корма, то на 2D-карте образуется точка недоступности для движения и этот маршрут признается не доступным для движения. Если остаток корма имеет высоту лишь 4 см, то точка на сжатой 2D-карте не образуется и этот маршрут независимо от имеющегося остатка корма принципиально разрешается к использованию как маршрут движения. Тогда препятствие переезжается кроме случаев, когда происходит вмешательство в управление на основе данных других датчиков. Эти данные других датчиков могут представлять собой, например, данные теплового или магнитного датчика для обеспечения того, чтобы переезд через определенные объекты, например через небольших животных или металлические детали, не происходил даже тогда, когда они не выступают за предварительно заданный уровень высоты (в случае описанного примера: 5 см).
Помимо этого, разумеется, является возможным и даже предпочтительным определение безопасных расстояний. Для автономного транспортного средства шириной 2 м и высотой 3 м может быть предусмотрено, например, безопасное расстояние сверху и по бокам по 10 см. Тогда, если препятствие находится на высоте 3,05 м, это препятствие тоже образует точку в сжатой 2D-карте и маршрут классифицируется как не доступный для движения.
За счет этого выявляют, имеются ли на предусмотренном пути движения в области контура транспортного средства препятствия, которые требуют, преимущественным образом, динамической адаптации пути движения к актуальным условиям.
В другой предпочтительной форме осуществления способа отдельные определяемые точки сравнивают с сохраненными в вычислительном устройстве объектами и/или с наборами параметров этих объектов и классифицируют на этой базе. Сохраненные объекты могут представлять собой, например, боковые стены, пол, различные кормовые средства, обивку потолка или иные известные препятствия. Вследствие того, что объекты идентифицируют на основе отдельных определяемых точек, определение комплектных трехмерных данных для этих объектов становится излишним. Таким образом, объекты могут быть приобщены к определению пути движения без необходимости принятия за основу при расчете регистрируемых непрерывно сканером или датчиком комплектных трехмерных структур.
Помимо этого, может быть предусмотрено, что в вычислительное устройство закладывают информацию о позиции статичных объектов и/или динамичных объектов и/или переменных объектов в различных двух- или трехмерных библиотеках данных. За счет этого можно удобно для пользователя адаптировать отдельные слои данных и управлять ими. Например, можно применительно к ситуации адаптировать позицию различных переменных объектов, таких как различные кучи силосной массы или же запасов корма. Можно, например, силосный склад, который в одном году был задан как склад кукурузы, в другом году задать как склад травы. Или можно занять свободную площадь для последующего запасания корма.
В другой предпочтительной форме осуществления способа примененное для реализации способа автономное транспортное средство задумывают в виде кормосмесительной тележки с устройством для выемки кормового средства из хранилища. При этом, преимущественным образом, предусматривают, что:
- автономное транспортное средство включает в себя заборное устройство,
- для приема различных кормовых средств в вычислительном устройстве сохранены различные стратегии выемки для управления заборным устройством,
- посредством по меньшей мере одного сканера и/или датчика определяют структуру кормового средства в области стартовой точки выемки и сравнивают с записанными в вычислительное устройство структурами и/или наборами параметров кормовых средств,
- на базе предварительно заданных критериев с идентифицированной структурой в области стартовой точки выемки соотносят стратегию выемки,
- вычислительное устройство управляет заборным устройством с соотнесенной стратегией выемки.
В связи с этим под стратегией выемки следует понимать адаптированное к соответствующему извлекаемому кормовому средству управление заборным устройством. Заборное устройство кормосмесительной тележки может содержать различные агрегаты, такие как отвал с режущей кромкой и/или фрезерный барабан и/или питающий валик. Привод этих агрегатов является варьируемым. Если выемка кормового средства осуществляется с соответственно выбранной для этого кормового средства стратегией выемки, то производительность способа в целом, то есть загрузка автономного транспортного средства, прежде всего кормосмесительной тележки, различными кормовыми средствами, повышается. Так, например, может иметь смысл снижение скорости выемки при трудно извлекаемых из хранилища кормовых средствах и ее повышение при легко извлекаемых кормовых средствах.
Помимо этого, могут быть предварительно заданы и сохранены критерии, при установлении наличия которых способ управления автономным транспортным средством останавливают посредством устройства аварийной остановки. Посредством этого дополнительно повышают эксплуатационную безопасность и защиту от повреждений и/или выхода машины из строя.
Применение способа согласно изобретению предоставляет преимущества также внутри животноводческого помещения, в котором автономное транспортное средство, прежде всего кормосмесительная тележка, должно выгрузить загруженный сначала корм. Так, например, может быть произведен учет находящихся в животноводческом помещении коров, а их позиции могут быть приобщены к управлению, например, скоростью.
Помимо этого, примененный сканер может определить, имеются ли еще в кормовом проходе остаточные количества корма, так что выгружаемый кормовой рацион является приводимым в соответствие с еще имеющимся количеством корма.
При выемке корма из хранилища (силосохранилища) перед выемкой вся заборная поверхность или же ее поверхностная структура может быть снята с помощью сканера. Если при этом устанавливают наличие, например, обрушений корма, которые в виде небольших куч корма лежат перед собственно заборной поверхностью, то заборным устройством, которое представляет собой, преимущественным образом, движимое вверх и вниз фрезерное устройство, управляют так, что фрезерный процесс для выемки расположенной впереди кучи корма выполняют не по всей высоте хранилища, а только в области, в которой действительно находится корм. За счет этого предотвращают холостой ход заборного устройства.
В отличие от протекающего циклично заборного процесса, при котором выемку корма каждый раз продолжают в том месте, в котором ее закончили при предыдущей выемке, при применении способа согласно изобретению такая отсылка не требуется. Напротив, автономное транспортное средство, прежде всего кормосмесительная тележка, может подъехать к хранилищу, зарегистрировать актуальную действительную ситуацию и отсюда определить стартовую точку для последующей выемки корма. Следовательно, принципиально возможно также применение нескольких автономных транспортных средств, которые извлекают корм и кормят животных независимо друг от друга.
Помимо этого, возможна привязка кормления к общей системе управления кормлением. Данные об извлекаемых из хранилищ количествах корма, прежде всего данные о весе и/или питательных веществах, могут быть собраны и сохранены или переданы, например с помощью радио, на внешнюю компьютерную систему. На базе данных о геометрии заборной поверхности силосной массы, а также позиции заборной поверхности в хранилище можно определить также остаточное количество еще находящегося в хранилище корма и отсюда - временной запас кормоснабжения. Если при этом не достигается предварительно заданное значение, то может быть предусмотрено, что выдается сообщение в систему управления кормлением, так что оператор может принять меры, которые дают возможность дальнейшего обеспечения животных кормом после полного опорожнения хранилища. Например, в таком случае в процесс кормления может быть вовлечено другое хранилище корма.
Помимо этого, при применении способа согласно изобретению может быть оптимизирован подвод к стартовой точке выемки в силосохранилище. При этом сначала из первой предварительно заданной позиции, которая находится, как правило, на некотором удалении от хранилища, чтобы процесс начинался даже при наполненном хранилище, сканером регистрируют переднюю или же первую заборную область запаса корма и устанавливают стартовую точку выемки, к которой необходимо осуществить подвод. При последующем приближении автономного транспортного средства к стартовой точке выемки осуществляют проверку положения стартовой точки выемки из второй позиции, которая вследствие ее меньшего удаления от определяемой точки более благоприятна для определения данных, чем первая позиция. Таким образом, определенная из первой растровой точки стартовая точка выемки действует наподобие первого ориентировочного значения, на базе которого автономное транспортное средство продолжает приближаться к заборной области.
При этом, имея это первое ориентировочное значение, еще не достигают того, чтобы полученное заданное значение было точным до сантиметра или даже миллиметра. Важно лишь то, что после определения возможно еще относительно не точного первого заданного значения автономное транспортное средство может быть направлено к стартовой точке выемки. Затем из предусмотренной согласно изобретению второй растровой точки проверяют, было ли выполненное из первой растровой точки определение позиции стартовой точки выемки правильным или необходима дополнительная юстировка.
Является особо выгодным, если после проверки и нового установления стартовой точки выемки автономное транспортное средство направляют из второй растровой точки к третьей, четвертой, n-ой растровой точке, каждая из которых находится между пройденной перед этим растровой точкой и определенной перед этим стартовой точкой выемки, и причем в каждой растровой точке осуществляют новое определение стартовой точки выемки. Таким образом, вычислительное устройство автономного транспортного средства определяет стартовую точку выемки посредством итераций от растровой точки к растровой точке все точнее и становится в состоянии двигать автономное транспортное средство становящимися все точнее импульсами рулевого управления к стартовой точке выемки.
Для того чтобы можно было применять недорогие датчики и, несмотря на это, точно определять стартовую точку выемки, в простом осуществлении способа согласно изобретению привод движения автономного транспортного средства при достижении растровой точки останавливают. В этом случае определение стартовой точки выемки осуществляют при стоящем неподвижно в растровой точке автономном транспортном средстве.
Для того чтобы уменьшить требуемое для выемки корма время и повысить общую производительность автономного транспортного средства, в альтернативном выполнении привод движения автономного транспортного средства при достижении растровой точки не останавливают. В этом случае определение стартовой точки выемки осуществляют динамично при движущемся в растровой точке автономном транспортном средстве.
Так как автономное транспортное средство приближается к стартовой точке выемки посредством итераций, отклонения между двумя определенными одна за другой стартовыми точками выемки от одного нового определения к другому новому определению становятся все меньше. При малом расстоянии до стартовой точки выемки отклонение обычно находится в миллиметровой области. Для выемки корма без помех достаточно, однако, точного определения стартовой точки выемки в пределах предварительно заданного диапазона допусков, который больше, чем максимально достижимая точность. Помимо этого, выполненными на малом удалении от стартовой точки выемки движениями рулевого управления вызываются соответственно малые корректировки. Поэтому является предпочтительным, если после определения стартовой точки выемки проверку и новое определение выполняют только тогда, когда расстояние между растровой точкой, из которой была определена стартовая точка выемки, и стартовой точкой выемки не менее предварительно заданной величины (х) расстояния. Эта предварительно заданная величина расстояния составляет, преимущественным образом, 1 м. Однако, например на фоне зависящих от кормового средства требований к точности, не исключено предварительное определение другой величины расстояния.
Помимо этого, задача согласно изобретению решена посредством компьютерного программного продукта для осуществления описанного способа. Компьютерный программный продукт может быть составлен на любом языке. Является существенным, чтобы компьютерный программный продукт был совместим с примененным компьютерным аппаратурным обеспечением, которое представляет собой, например, ПК, вычислительное устройство для управления технологическим процессом, планшетный компьютер или смартфон.
Помимо этого, изобретение может быть реализовано в устройстве управления, прежде всего в устройстве обработки данных или же в компьютере, для осуществления описанного способа. Устройство управления пригодно для выполнения компьютерной программы.
Помимо этого, задача согласно изобретению решена, прежде всего, посредством кормосмесительной тележки согласно п. 13 формулы изобретения для осуществления способа согласно изобретению. При этом особо предпочтительным является кормосмесительная тележка для кормления поголовий скота. Кормосмесительная тележка, преимущественным образом, включает в себя:
- выполненную с возможностью автономного передвижения и управления ходовую часть,
- рабочие органы в виде приводного двигателя, привода движения, смесительного резервуара, устройства для вывода кормового средства, взвешивающего устройства для подлежащего приему количества корма и системы рулевого управления для ходовой части,
- по меньшей мере один сканер и/или по меньшей мере один датчик для определения данных,
- по меньшей мере одно взаимодействующее со сканерами и/или датчиками вычислительное устройство, в котором в качестве сканера предусмотрен двухмерный лазерный сканер, который является поворачиваемым на угол рыскания, так что посредством вращательного движения сканера являются определяемыми двухмерные данные в различных плоскостях, и из двухмерных данных различных плоскостей являются выводимыми данные трехмерно отображающего окружающее пространство облака точек.
Двухмерный сканер дешев и, если он эксплуатируется описанным образом, предоставляет данные, которые дают возможность составления 3D-карты.
В последующем, разъясняется подробнее с помощью приложенного чертежа на примере задуманного в виде кормосмесительной тележки автономного транспортного средства.
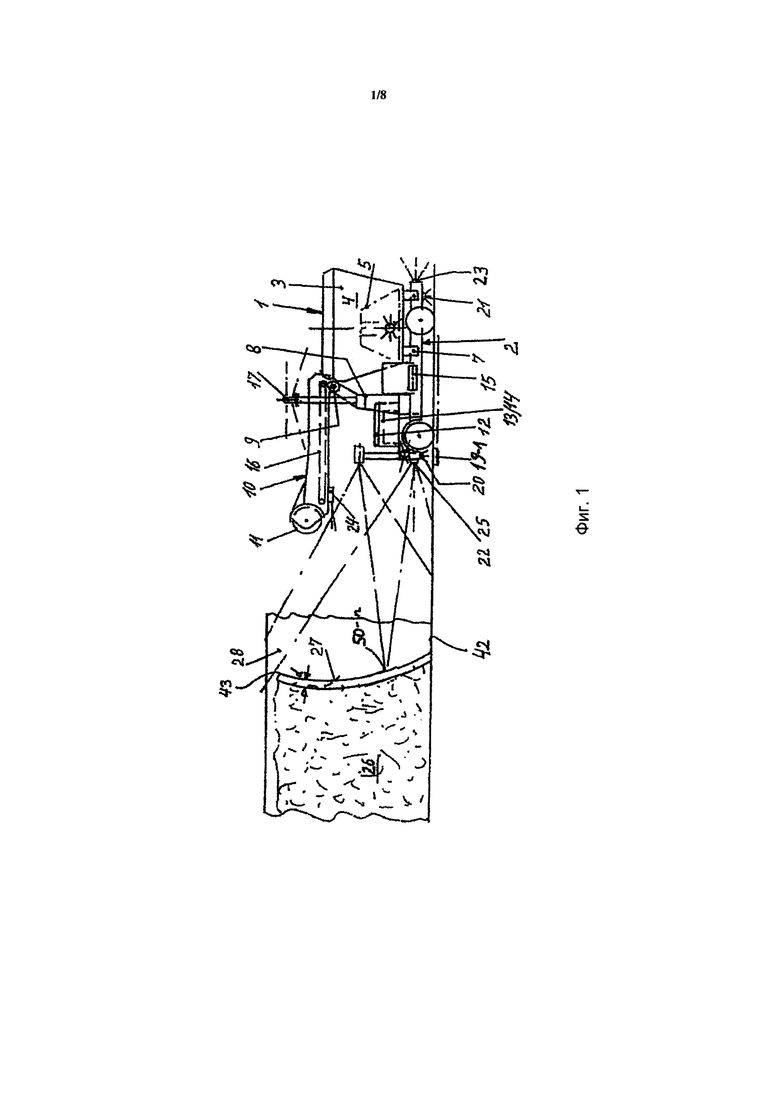
Фиг. 1 показывает вид сбоку на позиционированное в растровой точке автономное транспортное средство (кормосмесительную тележку) при сборе данных о заборной поверхности силосохранилища малой высоты,
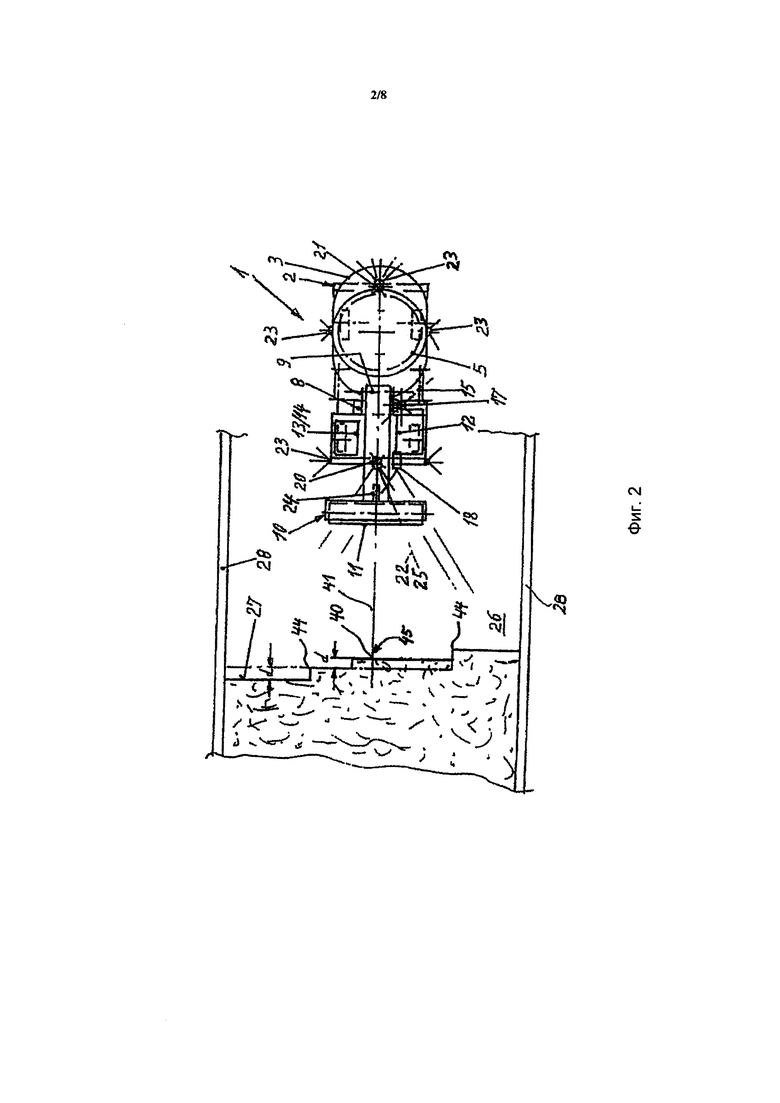
Фиг. 2 показывает вид сверху фиг. 1,
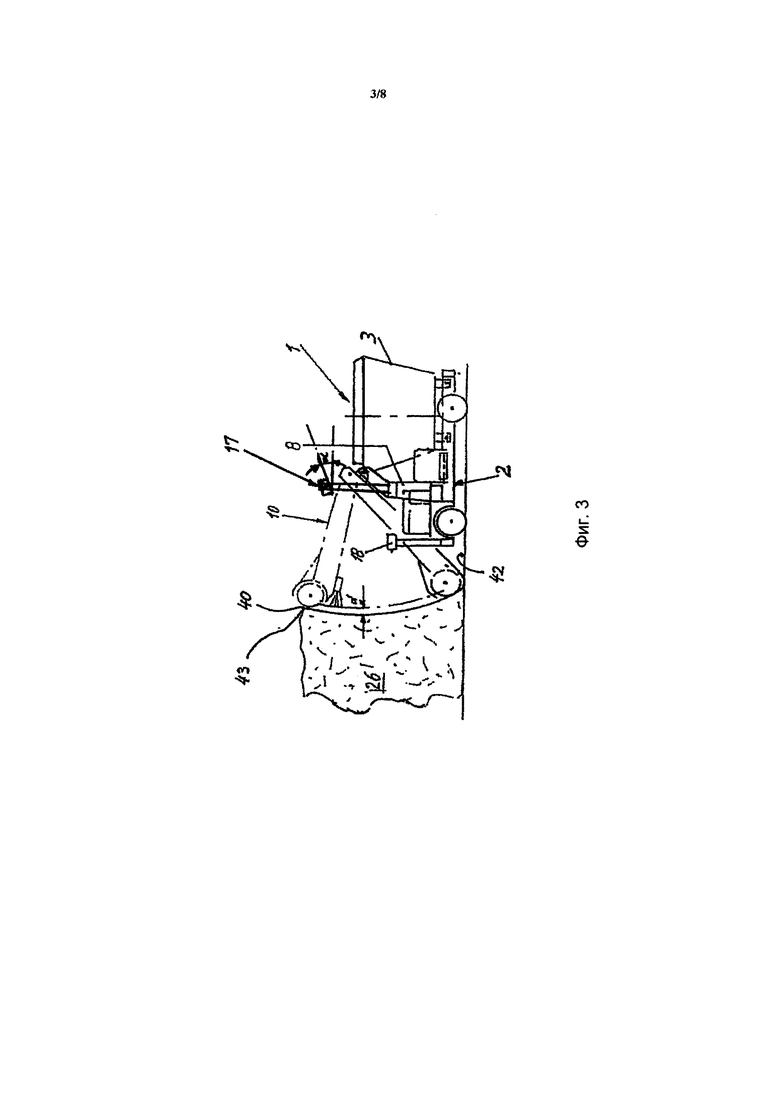
Фиг. 3 показывает автономное транспортное средство в рабочем положении,
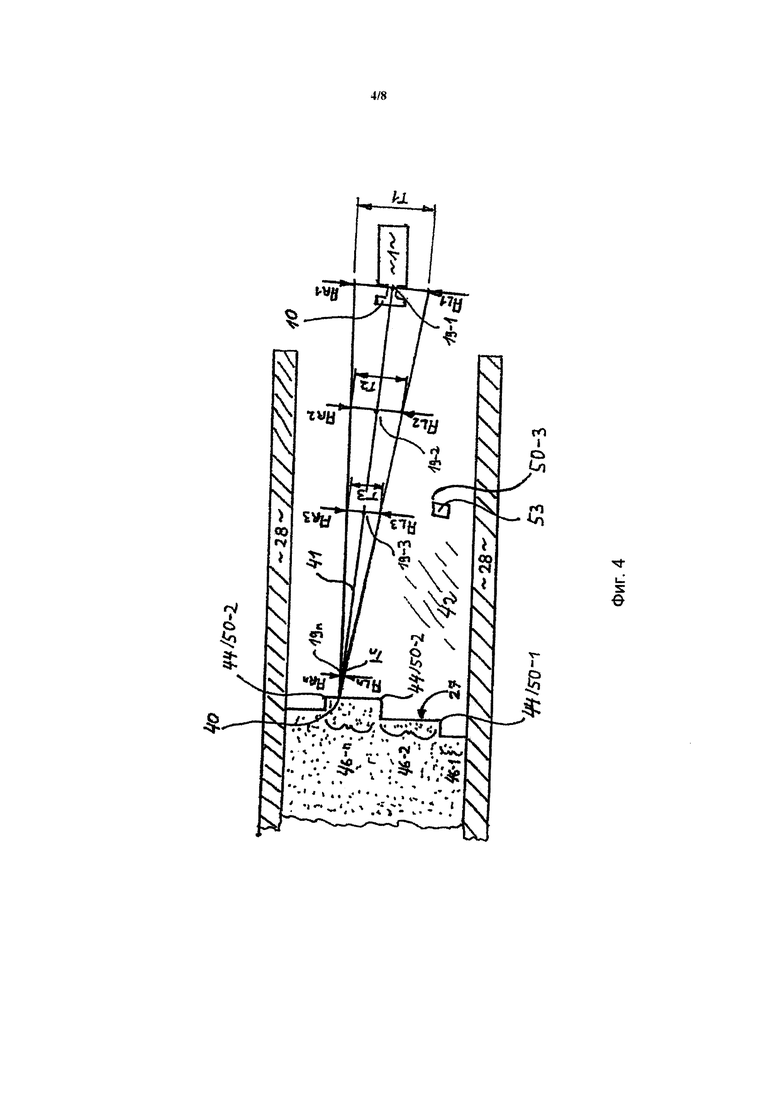
Фиг. 4 показывает вид сверху на позиционированное в растровой точке автономное транспортное средство в схематическом изображении,
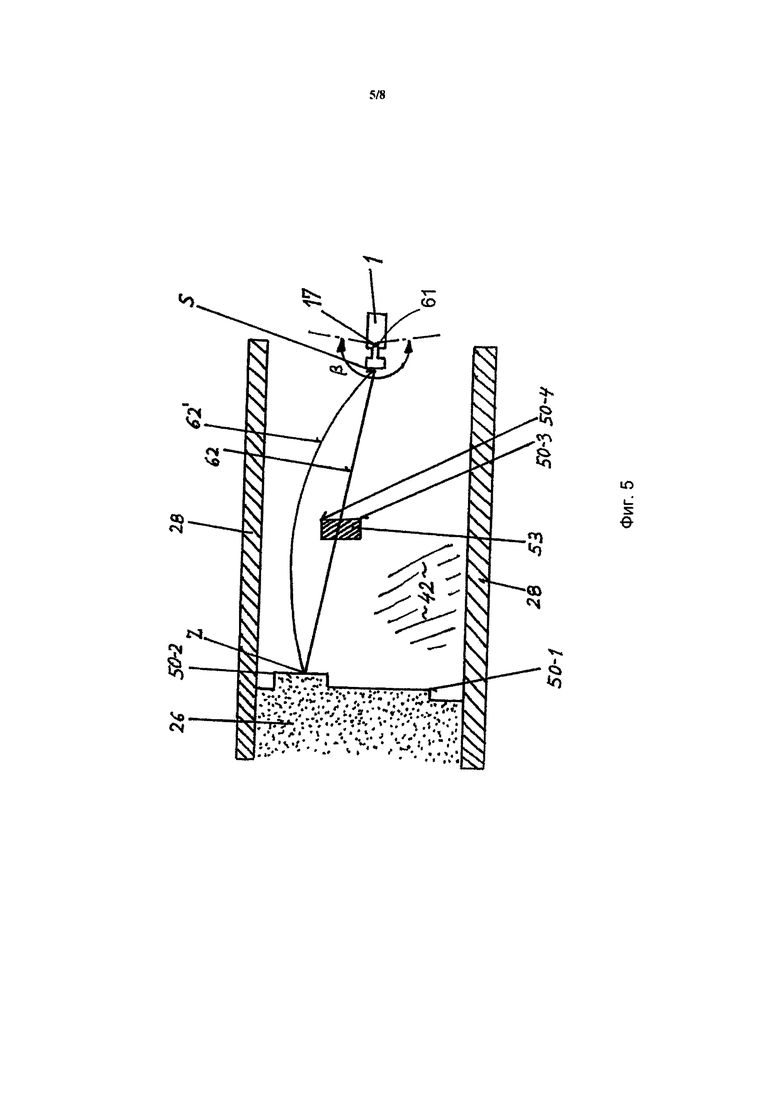
Фиг. 5 показывает вид сверху на автономное транспортное средство в схематическом изображении во взаимосвязи с выполненной автономно корректировкой маршрута движения,
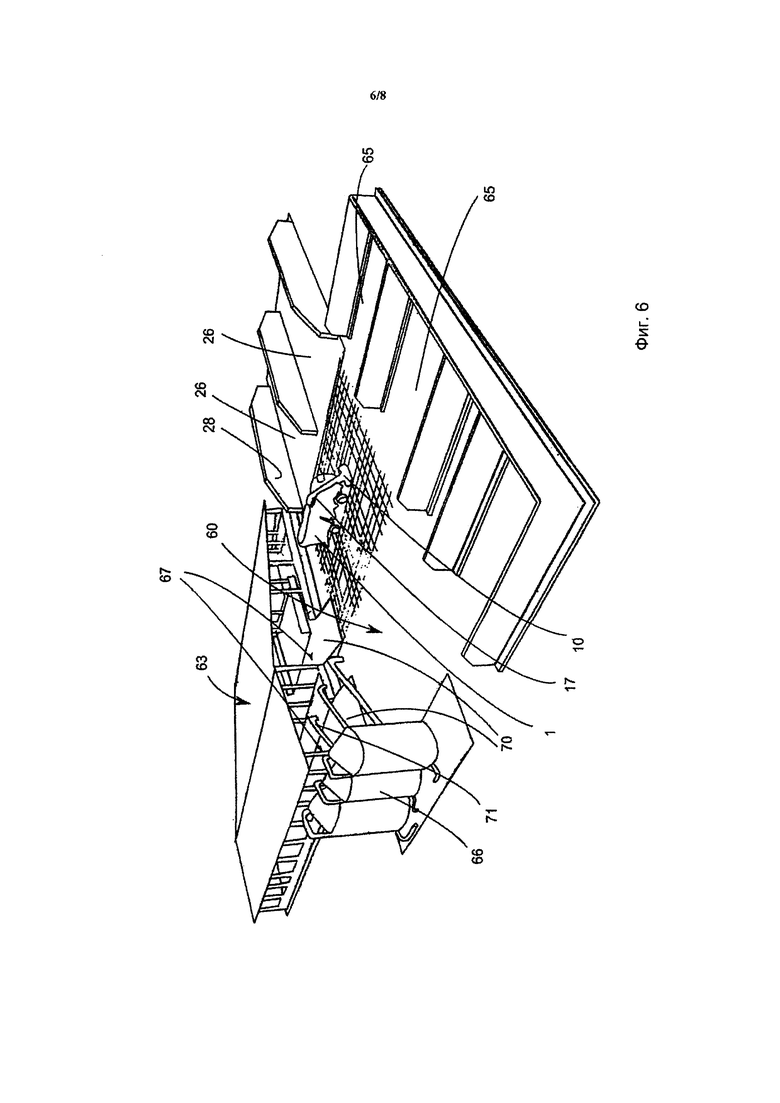
Фиг. 6 показывает животноводческое помещение, несколько хранилищ запаса корма и автономное транспортное средство в изображении в перспективе,
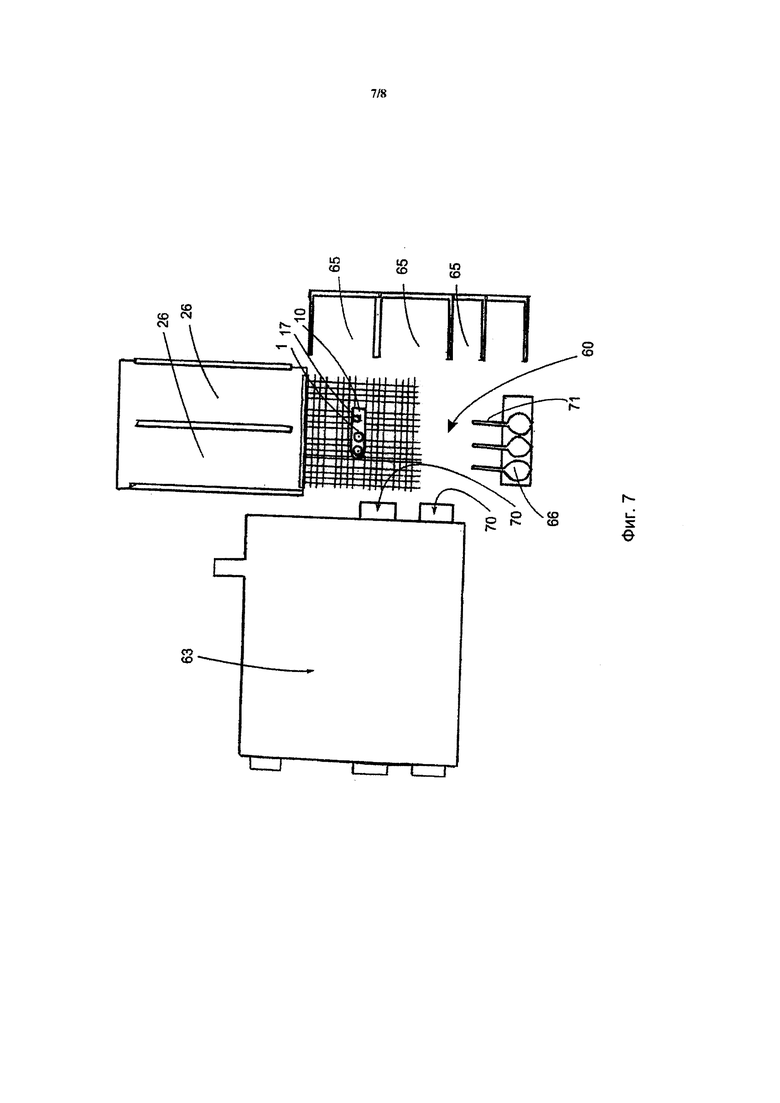
Фиг. 7 показывает изображение согласно фиг. 6 в виде сверху, и
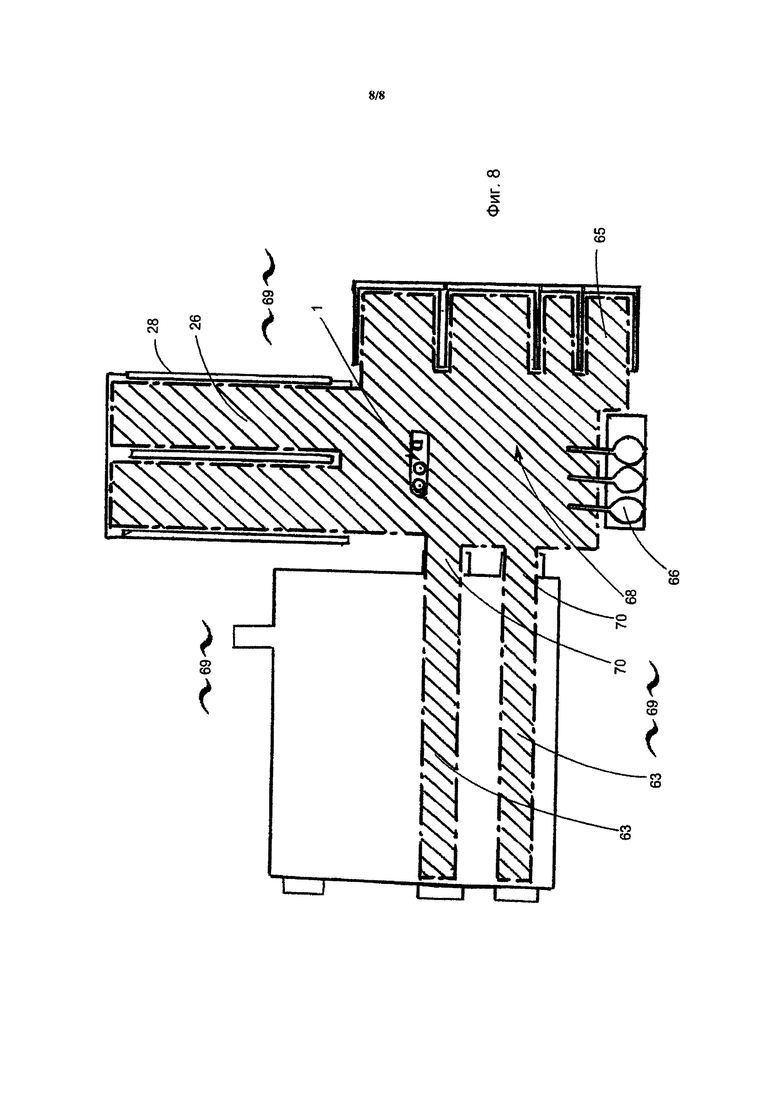
Фиг. 8 показывает изображение согласно фиг. 7 с выделением заданной в качестве области движения площади.
В последующих фигурах одинаковые или подобные элементы могут быть снабжены одинаковыми или подобными ссылочными обозначениями. Помимо этого, фигуры чертежа, их описание, а также формула изобретения содержат многочисленные признаки в комбинации. При этом специалисту ясно, что эти признаки могут рассматриваться также по отдельности или они могут быть сведены в другие, не описанные здесь подробнее комбинации.
На фиг. 1 и 2 показана по существу примерная структура автономного транспортного средства. Автономное транспортное средство представляет собой кормосмесительную тележку 1 без кабины водителя для оператора. Тем не менее, осуществление способа согласно изобретению возможно, разумеется, не только на полностью автономном транспортном средстве, но может быть также интегрировано в виде системы содействия управлению транспортным средством в устройство управления оснащенного местом водителя транспортного средства.
Существенными для способа согласно изобретению являются не тип или же цель применения автономного транспортного средства или выбранные для выполнения частичных функций, таких как выемка корма, смешивание корма и раскладывание корма, агрегаты. Существенными являются, скорее, необходимые для реализации, по меньшей мере, частично автономного управления процессы управления или же элементы, такие как соответствующие датчики.
На первой ступени (система содействия управлению) эти элементы предоставляют возможность автономного управления частичными задачами, например задачей "выемка корма". На второй ступени автономное транспортное средство может быть конфигурировано так, что вся работа по управлению выполняется автономно, так что оно является применимым без оператора.
В последующем, подробнее описывается пример выполнения "кормосмесительной тележки". Для того чтобы для выемки корма из силосохранилища 26 малой высоты с помощью, по меньшей мере, частично автономной кормосмесительной тележки 1 распознавать позиционные качественные данные о запасе корма, для управления органами движения и рабочими органами кормосмесительная тележка 1 оснащена приборами регистрации с сенсорной поддержкой, такими как, например, сканер или камера.
Кормосмесительная тележка 1 включает в себя ходовую часть 2, которая с помощью стержневых тензодатчиков 7 держит смесительный резервуар 3, в смесительной камере 4 которого расположен смесительный шнек 5. На ходовой части 2 расположена несущая рама 8, которая на поворотной оси 9 держит заборное устройство 10, которое на внешнем конце оснащено фрезерным барабаном 11 и поднимается и опускается с помощью подъемного цилиндра гидравлического действия. Альтернативно фрезерному барабану 11 может быть предусмотрено также другое заборное устройство, например отвал с режущей кромкой или комбинация отвала с режущей кромкой и подающего валика. Помимо этого, ходовая часть 2 держит приводной двигатель 12 для привода движения и рабочих органов, блок 13 управления и вычислительное устройство 14, причем вычислительное устройство, используя определенные и переданные регистрирующими устройствами данные, в координации с интегрированным или отдельным вычислительным устройством взвешивающего устройства регулирует коммутационные процессы блока 13 управления.
В памяти вычислительного устройства 14 запрограммированы повторяющиеся процессы. Вычислительное устройство 14, например через радио, может быть связано с внешним вычислительным устройством пункта управления и контролируемо в любое время. Для выгрузки корма кормосмесительная тележка 1 оснащена ленточным транспортером 15. Расположенные на кормосмесительной тележке 1 сканеры 17, 20, 21, 22, 23, 24 предоставляют возможность выполнения различных задач.
В представленном на фиг. 1 примере выполнения проводка кормосмесительной тележки по колее осуществляется частично индуктивно. При этом сканер 20 служит для проводки кормосмесительной тележки 1 вдоль проложенной в полу направляющей шины и позиционирует кормосмесительную тележку в области силосохранилища 26 малой высоты в растровой точке 19-1. Для содействия этой задачи служит другой сканер 21. Альтернативно представленной индуктивной проводке по колее возможна также оптическая или виртуальная (например с помощью GPS) проводка по колее.
Для предохранения и выявления препятствий впереди расположен сканер 22, задачей которого является сбор данных о геометрической форме торцевой стены или же заборной поверхности 27 силосохранилища 26 малой высоты. Расположенные с боков сканеры 23 наряду с распознаванием препятствий выполняют также измерение расстояний, например до боковых стен 28.
С задней стороны из соображений безопасности за окружающим пространством наблюдает сканер 23. Расположенный на заборном устройстве 10 сканер 24 регистрирует расстояние до заборной поверхности 27 и определяет данные для установления глубины d резания снимаемого фрезерованием слоя корма. Инфракрасный датчик 25 и/или тепловизионная камера 18 устанавливают местонахождение заборной области и определяют качество обнаруженного там и находящегося на заборной поверхности 27 корма.
Не исключено, что соотнесенные со сканерами 17, 20, 21, 22, 23, 24 задачи охватываются меньшим количеством сканеров, прежде всего расположенным в центре сканером 17.
Для запуска программы автономного кормления через выключатель с часовым механизмом или по сигналу с пункта управления запускается приводной двигатель 12 и кормосмесительная тележка 1 с приподнятым заборным устройством 10 приводится в движение. От места своей стоянки она сначала проводится сканером 20 вдоль направляющей линии, причем для обнаружения препятствий активированы другие сканеры 23.
Альтернативно навигации вдоль направляющей линии может быть предусмотрена также GPS-система 61 или оптическая навигация. При оптической навигации сканер 17 или другой датчик устанавливает местонахождение статичных объектов в области обнаружения датчика, идентифицирует их и определяет относительную позицию кормосмесительной тележки 1 по отношению к этим статичным объектам. Так как позиция статичных объектов неизменна и к тому же сохранена в вычислительном устройстве 14, затем, исходя из сохраненной в вычислительном устройстве 14 позиции статичных объектов, в вычислительном устройстве делается заключение о текущей позиции кормосмесительной тележки 1.
Сканер 17 представляет собой двухмерный лазерный сканер, который приведен в наклоненное на угол а положение на кормосмесительной тележке 1. Сканер 17 может обнаруживать объекты в пределах рабочего диапазона, составляющего 190°. Сканер непрерывно поворачивается на угол рыскания. Двухмерный сканер 17 принципиально собирает данные об объектах на плоскости, на который он ориентирован в момент обнаружения. При этом твердые структуры воспринимаются как отдельные точки. Сканер 17 передвигается малыми единицами времени и малыми угловыми единицами и при этом соответственно регистрирует в виде точек объекты в пределах актуальной плоскости поворота. Отдельные точки разных регистрируемых плоскостей передаются на вычислительное устройство 14 и сводятся там в трехмерное облако точек. Это трехмерное облако точек перерабатывается в вычислительном устройстве в трехмерную карту действительного состояния окружающего в текущий момент времени кормосмесительную тележку пространства.
Альтернативно двухмерному сканеру 17 применим также трехмерный сканер, который предоставляет необходимые для определения окружающего пространства данные непосредственно, преимущественным образом без поворачивания сканера на названный угол рыскания.
В этом примере выполнения трехмерная карта действительного состояния сопоставляется с заложенной в вычислительном устройстве 14 2D-картой, в которой задана разрешенная для движения кормосмесительной тележки площадь 68.
На фиг. 4 показана подошедшая к силосохранилищу 26 малой высоты кормосмесительная тележка 1, которая в изображенном примере выполнения с помощью сканера 20 была позиционирована в растровой точке 19-1. Для того чтобы можно было гибко осуществлять навигацию кормосмесительной тележки в области силосохранилища малой высоты, в растровой точке 19-1 прекращается ее проводка по колее вдоль ведущей линии и меняется на систему радиопеленгации, например с применением уже описанного поворачиваемого двухмерного сканера 17. Сканер 17 собирает данные об окружающем пространстве, причем для улучшения сбора данных в области силосохранилища малой высоты или на имеющихся боковых стенах 28 дополнительно могут быть расположены расположенные отдельно рефлекторы.
Из растровой точки 19-1 с помощью инфракрасного сканера 25 и/или инфракрасной тепловизионной камеры 18 регистрируется качественная структура силосной массы в форме позиционных данных о качестве, а с помощью сканера 22, в первую очередь в лазерном выполнении, -геометрическая поверхностная структура на заборной поверхности 27.
Цель этого определения данных состоит в установлении стартовой точки 40 выемки в форме трехмерных пространственных координат, подвод к которой затем выполняется автономно.
Для установления стартовой точки 40 выемки применяют, преимущественным образом, следующий способ:
- проверяют заборную поверхность 27 на наличие отвесных кромок 44,
- если в заборной поверхности 27 кромки 44 не идентифицируемы, то стартовую точку 40 выемки устанавливают на отвесной линии проекции заборной поверхности 27, расстояние от которой до бокового края силосохранилища 26 малой высоты или же в определенных случаях до боковой стены 28 равно половине заборной ширины заборного устройства 10,
- если отвесная линия 45 проекции пересекает в пределах заборной поверхности 27 горизонтальную кромку, то есть, если идентифицируют заборный выступ от предыдущей выемки кормового средства, то в качестве стартовой точки 40 выемки задают найденную точку пересечения,
- если отвесная линия 45 проекции не пересекает в пределах заборной поверхности 27 горизонтальной кромки, то в качестве стартовой точки 40 выемки задают точку пересечения верхней кромки 43 заборной поверхности 27 и линии 45 проекции,
- если в заборной поверхности 27 идентифицируемы кромки 44, то идентифицируют выступающий дальше всего в направлении кормосмесительной тележки 1 блок 46-n (под "блоком" в связи с этим понимают область между двумя кромками 44, сравни с фиг. 4: блоки 46-1, 46-2, 46-n),
- проверяют ширину блока 46-n,
- если блок 46-n уже, чем ширина заборного устройства 10, то стартовую точку 40 выемки устанавливают посредине перед блоком,
- проверяют, имеется ли в блоке 46-n горизонтальная кромка,
- если горизонтальная кромка имеется, то в качестве стартовой точки 40 выемки устанавливают точку пересечения горизонтальной кромки и средней линии блока,
- если горизонтальной кромки нет, то в качестве стартовой точки 40 выемки устанавливают точку пересечения верхней кромки 43 и средней линии блока,
- если блок 46-n шире, чем ширина заборного устройства 10: идентифицируют кромку, которая расположена на наименьшем расстоянии от середины силосохранилища 26 малой высоты и устанавливают стартовую точку 40 выемки так, что выемка начинается на этой кромке,
- проверяют, расположена ли полученная стартовая точка выемки слишком близко к стене 28, если да: положение стартовой точки 40 выемки корректируют так, чтобы в процессе выемки столкновение заборного устройства 10 со стеной 28 было исключено.
Разумеется, в зависимости от внешних краевых условий, таких как, например, от конструкции силосохранилища 26 малой высоты или же от другого оснащения кормохранилища, предложенный способ может быть модифицирован. Является существенным, чтобы был налажен стандартизированный способ, который в результате задает стартовую точку 40 выемки, к которой в дальнейшем ходе процесса выемки кормосмесительная тележка может быть направлена автоматически.
Помимо этого, в программу движения заложены стандартные программы для выявления посторонних предметов 53, а также стратегий для вовлечения этих посторонних предметов 53 в определение пути движения к стартовой точке выемки.
Для повышения безопасности работ предусмотрена программа аварийного отключения, которая при наступлении непредусмотренных событий деактивирует все приводные функции и в определенных случаях посылает на пункт управления аварийный сигнал.
В случае необходимости, возможна поддержка за счет видеокамеры или посредством GPS-навигации. Из растровой точки 19-1 кормосмесительная тележка 1 целенаправленно подводится к уже определенной стартовой точке 40 выемки.
В представленном примере выполнения определение стартовой точки 40 выемки происходит динамично, то есть при движущейся кормосмесительной тележке 1. Кормосмесительная тележка управляется, начиная от растровой точки 19-1, по виртуальному ведущему лучу 41 в направлении стартового места выемки. После первого определения стартовой точки 40 выемки через заданные интервалы времени и/или пути в других растровых точка 19-2, 19-3, …, 19-n происходит новый расчет стартовой точки 40 выемки и, при необходимости, корректировка предусмотренного пути движения.
На фиг. 4 схематически изображено приближение кормосмесительной тележки к стартовой точке 40 выемки. В растровой точке 19-1 имеется относительно большой диапазон Т1 допуска с возможным отклонением AR1 вправо и возможным отклонением AL1 влево. То есть, если бы кормосмесительная тележка двигалась из позиции 19-1 к стартовой точке 40 выемки без дополнительной юстировки, то при достижении стартовой точки 40 выемки ее действительная позиция могла бы отклоняться от идеальной позиции в пределах поля Т1 допуска.
При достижении растровой точки 19-2 происходит новый расчет стартовой точки 40 выемки. Так как расстояние от растровой точки 19-2 до стартовой точки 40 выемки меньше, чем от растровой точки 19-1, то таким же в процентном отношении отклонением от идеального ведущего луча 41 вызывается снижение отклонения как абсолютной величины. В то время как поле Т1 допуска в растровой точке 19-1 может составлять +/-10 см, поле Т2 допуска в растровой точке 19-2 составляет всего лишь +/-8 см.
Таким образом, первым новым расчетом стартовой точки выемки на половине пути вызывается снижение поля допуска на 50%. Чем чаще производится новый расчет в других растровых точках 19-2, …, 19-n, тем точнее подводится кормосмесительная тележка 1 вдоль ведущего луча 41 к стартовой точке 40 выемки и тем меньше при достижении стартовой точки 40 выемки разница между фактической позицией кормосмесительной тележки и идеальной стартовой точкой 40 выемки. Таким образом, кормосмесительная тележка 1 приближается к стартовой точке 40 выемки посредством итераций.
На предварительно заданном расстоянии от кормосмесительной тележки до стартовой точки 40 выемки непрерывный новый расчет прекращается, и программа запускается для тоже автоматизированной выемки корма с помощью заборного устройства 10.
На фиг. 3 показана кормосмесительная тележка после достижения или же при достижении стартовой точки 40 выемки. Если стартовая точка 40 выемки расположена на верхней кромке 43 силосохранилища 26 малой высоты, то заборное устройство 10 подводится к верхней кромке заборной поверхности силосохранилища 26 малой высоты, причем с помощью сканера 24 определяется толщина d) слоя извлекаемого слоя корма. Если стартовая точка 40 выемки расположена не на верхней кромке 43 силосохранилища 26 малой высоты, а в области между полом 42 и верхней кромкой 43, например на находящемся там выступе от предыдущей выемки корма, то заборное устройство 10 целенаправленно извлекает корм с этого выступающего места. При опускании заборного устройства 10 вращающийся фрезерный барабан 11 отделяет соответствующий слой корма. Через ленточный транспортер 16 в шахте заборного устройства 10 корм подается в смесительный резервуар 3.
Когда в смесительном резервуаре 3 достигается запрограммированное, измеренное с помощью стержневых тензодатчиков 7, весовое количество, об этом взвешивающим устройством сообщается на вычислительное устройство 14, которое немедленно выдает сигнал для прекращения выемки корма.
После этого кормосмесительная тележка 1 движется, например, от хранилища травяного силоса к растровой точке хранилища кукурузного силоса, где она тоже с известными этапами работы принимает некоторое количество корма до достижения запрограммированного веса.
После выемки корма из силосохранилища малой высоты кормосмесительная тележка 1 может быть снова передана уже упомянутой направляющей системе с проводкой в колее. Если это предусмотрено, она может быть направлена к промежуточной станции и там принять, например, концентрированный корм. После завершения вызываемого вращающимся смесительным шнеком 5 процесса перемешивания принятые виды корма в виде однородной кормовой смеси раскладываются с помощью ленточного транспортера 15 в кормовом проходе.
Альтернативно изображенной комбинации проводки в колее с помощью виртуальных, оптических и индуктивных подкомпонентов устройство управления можно сконфигурировать также так, чтобы проводка в колее во всей системе, то есть во всем пространстве движения кормосмесительной тележки, осуществлялась только оптически, виртуально или индуктивно.
На фиг. 5 показана автономная корректировка предусмотренного сначала пути 62 движения в путь 62' движения. Путь 62 движения образует кратчайшее соединение между стартовой точкой S и целевой точкой Z и, следовательно, представляет собой принципиально предпочтительный путь движения. Правда, в изображенной на фиг. 5 ситуации на этом пути 62 движения находится объект 53. Сканер 17 определяет координаты обнаруживаемых в окружающей среде точек 50-1, 50-2, 50-n. В геометрических данных об объекте 53 содержатся, прежде всего, его угловые точки 50-3 и 50-4. Обнаруженный объект 53 сопоставляется вычислительным устройством с заданной как свободно доступной для движения площадью, областью 68 движения (сравни с фиг. 8) и размещается там.
После размещения объекта 53 предусмотрены вычислительные процессы для определения альтернативного пути 62' движения. При сравнении точки 50-4 объекта с положением боковой стены 28, которая представляет собой заложенный в статичную 2Э-карту объект, устанавливается, что расстояние между боковой стеной 28 и точкой 50-4 объекта является достаточно широким для проезда кормосмесительной тележки 1. Отсюда в качестве нового соединительного участка между стартовой точкой S и целевой точкой Z получается путь 62' движения. Преимущественным образом, предусмотрено, что вычислительное устройство 14 таким образом не только определяет один альтернативный путь 62' движения, а проверяет несколько потенциальных альтернатив и наконец на основе предварительно заданных критериев выбирает определенный как оптимальный путь 62' движения.
Определение пути 62' движения и базирующееся на этом управление дальнейшим движением кормосмесительной тележки 1 происходит автономно, то есть без вмешательства обслуживающего лица, и в режиме реального времени. Вычислительным устройством непрерывно проверяется возможность движения по предусмотренному на настоящий момент времени в качестве актуального пути 62 движения и, при необходимости, осуществляется адаптация к новому пути 62' движения.
На фиг. 6 показана кормосмесительная тележка 1 в приведенной в качестве примера рабочей среде. Кормосмесительная тележка 1 находится в расположенной по центру области 60 двора. Область 60 двора окружена различными местами 26, 65, 66 хранения корма, а также животноводческим помещением 63. Места хранения корма представляют собой силосные башни 66 и силосные траншеи 26 и 66. В силосных траншеях 26 хранятся, преимущественным образом, основные виды корма, такие как трава и кукуруза, силосная траншея 66 служит для приема других компонентов корма, например сои или выжимок. Наполнение смесительного резервуара 3 осуществляется или с помощью предусмотренного на кормосмесительной тележке заборного устройства 10, или посредством предусмотренного в месте хранения корма наполнительного устройства, например установленного в силосной башне 66 подъемника 71 для корма.
После того как кормосмесительная тележка 1 наполнена на базе заданных рецептур, разные компоненты перерабатываются в однородную кормовую смесь. Кормовая смесь, как правило, в виде валка раскладывается в кормовом проходе 67 животноводческого помещения 63 и предлагается для потребления содержащимся в животноводческом помещении животным. Животноводческое помещение или же кормовые проходы 67 доступны для кормосмесительной тележки 1 из области 60 двора через рампу 70 с легким подъемом.
На фиг. 7 и 8 показан вид сверху на представленное на фиг. 6 оборудование. В дополнение к этому, на фиг. 8 представлена заданная как свободно доступная для движения кормосмесительной тележки площадь 68 и заданная как не доступная для движения площадь 69. Свободно доступная для движения площадь 68 заложена в вычислительном устройстве 14 кормосмесительной тележки 1 в предусмотренном для этого слое. Альтернативно свободно доступной для движения площади 68 в вычислительном устройстве 14 может быть заложено также свободно доступное для движения трехмерное пространство.
После завершения работ по выемке и/или кормлению кормосмесительная тележка 1 движется назад к месту стоянки и ожидает следующего заранее запрограммированного применения.
Кормосмесительная тележка 1 может постоянно контролироваться с пункта управления и, при необходимости, в любое время управляться оттуда. В случае необходимости, в любое время возможно ручное вмешательство в систему управления.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 кормосмесительная тележка
2 ходовая часть
3 смесительный резервуар
4 смесительная камера
5 смесительный шнек
6 -
7 стержневой тензодатчик
8 несущая рама
9 поворотная ось
10 заборное устройство
11 фрезерный барабан
12 приводной двигатель
13 блок управления
14 вычислительное устройство
15 ленточный транспортер (вынос)
16 ленточный транспортер (прием)
17 сканер (лазерный сканер)
18 тепловизионная камера
19-1, 19-2, …, 19-n растровая точка
20 сканер (проводка транспортного средства)
21 сканер (проводка транспортного средства сзади)
22 сканер (геометрическая форма)
23 сканер (распознавание препятствий)
24 сканер (измерение толщины)
25 инфракрасный датчик
26 силосохранилище малой высоты
27 заборная поверхность
28 боковая стена
29 -
30 -
31 -
32 -
33 -
34 -
35 -
36 -
37 -
38 -
39 -
40 стартовая точка выемки
41 ведущий луч
42 пол
43 верхняя кромка
44 отвесная кромка (заборной поверхности)
45 линия проекции 46-1, 46-2, …, 46-n блок
47 -
48 -
49 -
50-1, 50-2, …, 50-n отдельная точка
51 -
52 -
53 посторонний предмет
54 -
55 -
56 -
57 -
58 -
59 -
60 область двора
61 датчик (GPS-датчик) 62, 62' путь движения
63 животноводческое помещение
64 -
65 силосная траншея
66 силосная башня
67 кормовой проход
68 площадь (свободно доступная для движения)
69 площадь (не доступная для движения)
70 рампа
71 элеватор
72 -
d толщина слоя
T1, Т2, …, Tn поле допуска
AR1, AR2, …, ARn отклонение справа
AL1, AL2, …, ALn отклонение слева
S стартовая точка
Z целевая точка
α угол (наклон сканера)
β угол (рабочий диапазон сканера).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бесконтактного измерения геометрических параметров и породно-качественного состава штабеля круглых лесоматериалов, погруженных на автотранспорт и/или прицеп, и автоматизированная система для осуществления способа | 2021 |
|
RU2778975C1 |
| СПОСОБ И СИСТЕМА ДЛЯ УБОРКИ И СИЛОСОВАНИЯ КОРМОВОГО МАТЕРИАЛА | 2012 |
|
RU2599165C2 |
| Способ локализации и построения навигационных карт мобильного сервисного робота | 2020 |
|
RU2740229C1 |
| ВИРТУАЛЬНАЯ КАРТА ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2693400C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛОКАЛЬНЫХ КООРДИНАТ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА | 2018 |
|
RU2683993C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТОЧНОГО МЕСТОНАХОЖДЕНИЯ ПРОМЫШЛЕННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2570571C2 |
| УСТРОЙСТВО ДЛЯ СИЛОСОВАНИЯ КОРМОВ | 2014 |
|
RU2566633C1 |
| СПОСОБ И СИСТЕМА ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ НА ОСНОВЕ ДАННЫХ ТРЕХМЕРНОГО ДАТЧИКА | 2016 |
|
RU2656711C2 |
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ПОДВИЖНОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ ТРЕХМЕРНЫХ ДАТЧИКОВ | 2016 |
|
RU2658092C2 |
| Силосохранилище | 1982 |
|
SU1026706A1 |
Группа изобретений относится к сельскому хозяйству. Кормосмесительная тележка включает ходовую часть, рабочие органы, по меньшей мере один сканер и/или по меньшей мере один датчик. Со сканером и/или датчиком взаимодействует вычислительное устройство. Сканер и/или ин датчик собирает пространственные данные и создает карту актуальной геометрии окружающей среды. Актуальная геометрия окружающей среды соотносится с выделенной для передвижения областью, так что путь движения кормосмесительной тележки является проверяемым на его доступность для движения. В случае установления недоступности для движения кормосмесительной тележки путь ее движения автономно адаптируется к требованиям окружающей среды и заменяется альтернативным путем движения. 2 н. и 12 з.п. ф-лы, 8 ил.
1. Способ управления движением кормосмесительной тележки (1) из стартовой точки (S) к целевой точке (Z), причем кормосмесительная тележка (1) включает в себя следующие компоненты:
- выполненную с возможностью автономного передвижения и управления ходовую часть (2),
- рабочие органы в виде приводного двигателя (12), привода движения, смесительного резервуара (3), выпускного устройства для кормовых средств, взвешивающего устройства для подлежащего приему количества корма и системы рулевого управления для ходовой части (2),
- по меньшей мере один сканер (17, 20, 21, 22, 23, 24) и/или по меньшей мере один датчик (18, 25) для определения данных, причем сканер (17, 20, 21, 22, 23, 24) и/или по меньшей мере один датчик (18, 25) собирает данные об окружающей среде,
- по меньшей мере одно взаимодействующее со сканерами и/или датчиками вычислительное устройство (14),
отличающийся тем, что:
- вычислительное устройство (14) из собранных данных об окружающей среде определяет трехмерное и состоящее из отдельных точек (50-1, 50-2, …, 50-n) облако точек, отображающее окружающую среду, причем положение отдельных точек (50-1, 50-2, 50-3, …, 50-n) задано координатами соответствующих точек, и облако точек в целом характеризует ситуативную пространственную окружающую среду,
- на базе трехмерных данных в предварительно заданной плоскости слоя определяют двухмерный набор данных,
- на базе статичной трехмерной карты посредством сжатия относящихся к третьей плоскости данных в поверхность определяют двухмерную карту и определенные сканером (17, 20, 21, 22, 23, 24) и/или по меньшей мере одним датчиком (18, 25) данные сопоставляют со статичной двухмерной картой так, чтобы обеспечить возможность сравнения предусмотренного на базе статичной карты пути (62) движения с действительной ситуацией и проверки того, соответствует ли предусмотренный путь (62) движения предварительно заданным и сохраненным в вычислительном устройстве (14) требованиям к доступности для движения,
- позицию местонахождения кормосмесительной тележки (1) регистрируют и задают в вычислительном устройстве (14) в качестве стартовой точки (S),
- вычислительное устройство (14) определяет путь (62) движения между стартовой точкой (S) и предварительно заданной целевой точкой (Z),
- в вычислительном устройстве (14) сравнивают предварительно заданные параметры с отображающим окружающую среду облаком точек,
- в вычислительном устройстве (14) предварительно заданы критерии, которые дают возможность корректировки определенного пути (62) движения в рассчитанный вновь путь (62') движения,
что обеспечивает возможность проверки пути (62) движения кормосмесительной тележки (1) на его доступность для движения и в случае установления его недоступности для движения - возможность его автономной адаптации к требованиям ситуативной пространственной окружающей среды и замены альтернативным путем (62') движения.
2. Способ по п. 1, отличающийся тем, что в предварительно заданной плоскости слоя получают набор данных, содержащий все определенные сканерами и/или датчиками точки пространства, расположенные между грунтом и верхним краем кормосмесительной тележки и проецируемые на двухмерную плоскость.
3. Способ по п. 1 или 2, отличающийся тем, что в предварительно заданной плоскости слоя получают набор данных, содержащий все определенные сканерами и/или датчиками точки пространства, расположенные между находящимся на расстоянии от грунта уровнем высоты и верхним краем кормосмесительной тележки и проецируемые на двухмерную плоскость, что позволяет задать препятствия, обнаруживаемые ниже указанного уровня высоты, как незначимые для доступности движения по маршруту.
4. Способ по п. 3, отличающийся тем, что находящийся на расстоянии от грунта уровень высоты расположен на высоте 5 см, что позволяет задать препятствия, обнаруживаемые ниже этого уровня высоты, как незначимые для доступности движения по маршруту.
5. Способ по одному из пп. 1-4, отличающийся тем, что в вычислительное устройство (14) закладывают статичную трехмерную карту области применения кормосмесительной тележки (1) и определенные сканером (17, 20, 21, 22, 23, 24) и/или по меньшей мере одним датчиком (18, 25) данные сопоставляют со статичной трехмерной картой так, чтобы обеспечить возможность сравнения предусмотренного на базе статичной карты пути (62) движения с действительной ситуацией и проверки того, соответствует ли предусмотренный путь (62) движения предварительно заданным и сохраненным в вычислительном устройстве (14) требованиям к доступности для движения.
6. Способ по одному из пп. 1-5, отличающийся тем, что при недоступности для движения предусмотренного пути (62) движения на базе заложенной двух- или трехмерной карты посредством вычислительного устройства (14) автономно определяют альтернативный путь (62') движения для достижения предусмотренной целевой точки (Z) и применяют для подхода к целевой точке (Z).
7. Способ по одному из пп. 1-6, отличающийся тем, что проверку пути (62) движения на его доступность для движения осуществляют непрерывно.
8. Способ по одному из пп. 1-7, отличающийся тем, что в качестве сканера (17, 20, 21, 22, 23, 24) предусмотрен двухмерный лазерный сканер, который поворачивают на угол рыскания, что позволяет посредством вращательного движения сканера (17, 20, 21, 22, 23, 24) определять двухмерные данные в различных плоскостях и выводить из двухмерных данных различных плоскостей данные облака точек, трехмерно отображающего окружающее пространство.
9. Способ по одному из пп. 1-8, отличающийся тем, что в вычислительное устройство (14) в различных двух- или трехмерных библиотеках данных закладывают информацию о позициях статичных объектов и/или динамичных объектов и/или переменных объектов.
10. Способ по одному из пп. 1-9, отличающийся тем, что:
- отдельные точки (50-1, 50-2, …, 50-n) сравнивают с сохраненными в вычислительном устройстве (14) объектами и/или с наборами параметров этих объектов, таких, например, как боковая стена (28), пол (42), различные кормовые средства (51, 52), обшивка потолка, препятствия (53), и классифицируют на этой базе,
- отдельные точки (50-1, 50-2, …, 50-n) и/или идентифицированные на базе отдельных точек объекты приобщаются вычислительным устройством (14) к определению пути (62, 62') движения.
11. Способ по одному из пп. 1-10, отличающийся тем, что:
- кормосмесительная тележка (1) включает в себя заборное устройство (10),
- для приема различных кормовых средств в вычислительном устройстве (14) сохранены различные стратегии выемки для управления заборным устройством (10),
- посредством по меньшей мере одного сканера (17, 20, 21, 22, 23, 24) и/или датчика (18, 25) определяют структуру кормового средства в области стартовой точки (40) выемки и сравнивают с сохраненными в вычислительном устройстве (14) структурами и/или наборами параметров кормовых средств,
- на базе предварительно заданных критериев с идентифицированной структурой в области стартовой точки (40) выемки соотносят стратегию выемки,
- вычислительное устройство (14) управляет заборным устройством (10) с соотнесенной стратегией выемки.
12. Способ по одному из пп. 1-11, отличающийся тем, что в вычислительном устройстве предварительно задают критерии, при выполнении которых работа кормосмесительной тележки (1) останавливается посредством устройства аварийной остановки.
13. Кормосмесительная тележка (1), включающая в себя:
- выполненную с возможностью автономного передвижения и управления ходовую часть (2),
- рабочие органы в виде приводного двигателя (12), привода движения, смесительного резервуара (3), выпускного устройства для кормовых средств, взвешивающего устройства для подлежащего приему количества корма и системы рулевого управления для ходовой части (2),
- смесительный резервуар (3), выпускное устройство для кормовых средств и взвешивающее устройство для подлежащего приему количества корма,
- по меньшей мере один сканер (17, 20, 21, 22, 23, 24) и/или по меньшей мере один датчик (18, 25) для определения данных,
- по меньшей мере одно взаимодействующее со сканерами и/или датчиками вычислительное устройство (14),
отличающаяся тем, что вычислительное устройство (14) выполнено с возможностью осуществления способа по одному из пп. 1-12.
14. Кормосмесительная тележка (1) по п. 13, отличающаяся тем, что в качестве сканера (17, 20, 21, 22, 23, 24) предусмотрен двухмерный лазерный сканер, поворачиваемый на угол рыскания, что позволяет посредством вращательного движения сканера (17, 20, 21, 22, 23, 24) определять двухмерные данные в различных плоскостях и выводить из двухмерных данных различных плоскостей данные облака точек, трехмерно отображающего окружающее пространство.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| DE 102012107508 B3, 20.02.2014 | |||
| Устройство для забора кормов | 1988 |
|
SU1563625A1 |
| Погрузчик кормов | 1987 |
|
SU1443851A1 |

