Область техники
Настоящее изобретение относится к способам определения координат объектов, движущихся в ограниченном пространстве произвольной формы, а точнее, к способам определения координат устройств, перемещающихся в пространстве, применение в котором систем спутниковой навигации (GPS, ГЛОНАСС и т.п.) затруднено или невозможно.
Уровень техники
Известно использование автономных движущихся устройств (АДУ), таких как дроны, в различных областях техники для сбора данных об исследуемых объектах и их параметрах, и/или для осуществления действий над такими объектами. Специалисту в области техники понятно, что с помощью АДУ может быть организовано исследование неизвестного заранее участка пространства (фото/видео-съемка, пробы среды), посредством АДУ можно доставить в заданную точку пространства предмет (например, почтовую посылку) или вещество (например, удобрение). Необходимым условием выполнения любой из описанных выше задач является точное позиционирование АДУ. Для этого, согласно известным из уровня техники решениям, АДУ оснащается средствами определения абсолютных (глобальных) координат, которые используются для привязки полученных данных или для координации передвижения АДУ к цели. В основе технологий глобального позиционирования лежит метод трилатерации, в соответствии с которым координаты приемника вычисляются по измерению его удаленности до нескольких спутников, расположение которых известно.
Однако имеется множество задач, в которых использование средств определения абсолютных координат ограничено. Например, обследуемая территория или ее часть в силу своего типа (закрытое помещение), или геометрии (сложная геометрия с множеством узких проходов извилистой формы), или размещенного на ней оборудования (большое количество оборудования сложной формы) может не позволять принять сигнал от глобальных систем позиционирования.
В частности, указанные выше сложности наиболее ярко проявляются при исследовании ограниченного пространства произвольной геометрии и размещенных в нем объектов, когда заранее неизвестны ни план пространства, ни расположение в нем объектов, ни даже наличие объектов и их назначение. В этом случае требуется участие группы специалистов для предварительного обследования (сканирования) пространства и хотя бы примерного определения и идентификации в нем объектов, и только потом, после составления максимально подробного плана пространства и расположенных в нем объектов, становится возможным обследование с использованием АДУ.
Широко известны системы и способы локального позиционирования (LPS, от Local Positioning System), обеспечивающие определение координат объекта в границах определенных территорий и помещений, в которых вокруг зоны наблюдения размещаются устройства излучения электромагнитного или ультразвукового сигнала, а сами объекты оснащаются беспроводными цифровыми приемопередатчиками-метками, которые по уровню сигнала, фазе сигнала либо времени распространения сигнала измеряют расстояния беспроводным способом, по крайне мере, до трех стационарных источников сигнала (анкеров) с известными локальными (или абсолютными) координатами. Существенным недостатком таких систем и способов является необходимость заблаговременного создания капитальной инфраструктуры для проведения позиционирования, то есть известные системы и способы локального позиционирования непригодны для работы с совершенно неподготовленными пространствами.
Известен способ инерциальной навигации (определения координат и параметров движения различных объектов), основанный на свойствах инерции тел, являющийся автономным, то есть не требующим наличия внешних ориентиров или поступающих извне сигналов. Однако в условиях рассматриваемой задачи – позиционирования АДУ внутри ограниченных пространств (помещений, цехов, выработок), размеры которых относительно невелики по сравнению, например, с дистанциями, на которые перемещаются воздушные и морские суда, – способ имеет существенные ограничения. Недостатком способа инерциальной навигации является быстрое накопление погрешности данных, в особенности при определении замера расстояния, на которое сместилось АДУ. Так, при смещении автономного движущегося устройства на 10 метров такая система определения позиционирования может давать погрешность в 1 метр, или 10%. Недостаток можно устранить, вводя дифференциальные поправки, что приводит, по существу, к утрате автономности способа позиционирования. Таким образом, применение только способа инерциальной навигации для точного позиционирования АДУ внутри ограниченных пространств неприемлемо.
На сегодняшний день обеспечить позиционирование с точностью до миллиметров можно средствами лазерной дальнометрии. Основное преимущество лазерных методов измерения расстояния состоит в том, что длина волны лазерного излучения позволяет направить узкий сканирующий пучок и, таким образом, достичь более высокого пространственного разрешения. Еще одно преимущество заключается в том, что оптический полосовой фильтр позволяет эффективно отсечь шум, возникающий от других оптических частот. В основном, все лазерные сканеры (лидары) обладают точностью измерений с погрешностью от 1,5 до 2 мм. Известны высокоточные сканеры (дальность – от дециметра до 2–3 метров, погрешность – меньше миллиметра), сканеры среднего радиуса действия (дальность – до 200 м, погрешность – до нескольких миллиметров) и сканеры дальнего радиуса действия (погрешность – от миллиметров до нескольких сантиметров, дальность – сотни метров).
Из заявки на патент США US20160349746 известна система, позволяющая повысить точность позиционирования и стабильность полета беспилотного летательного аппарата посредством его взаимодействия с блоком лазерной дальнометрии. Недостатком указанной системы является невозможность обеспечения заявленных характеристик при обследовании пространства не одним, а множеством АДУ, а также невозможность обеспечения заявленных характеристик в случае выхода АДУ из зоны прямой видимости блока лазерной дальнометрии.
Известен способ одновременной локализации и построения карты (SLAM, от англ. Simultaneous Localization and Mapping), заключающийся в том, что автономные движущиеся устройства одновременно с построением карты (плана) заранее неизвестного пространства или же обновления такой карты осуществляют контроль своего текущего местоположения и пройденного пути. Получаемые в процессе движения АДУ карты используются для оценки фактического местоположения АДУ путем записи данных, полученных от датчиков (например, сенсоров восприятия пространства) в данном месте пространства, и сравнения их с набором данных, полученных в предыдущем месте. Технология SLAM связывает два независимых процесса – процесс получения данных от датчиков и процесс определения текущего местоположения – в непрерывный цикл последовательных вычислений, причем результаты процесса получения данных от датчиков используются в вычислениях процесса определения текущего местоположения.
Важным преимуществом технологии SLAM перед описанными ранее известными техническими решениями является то, что системе сбора данных не требуется определения абсолютных координат автономных движущихся устройств. Кроме того, системе сбора данных не требуется наличия уже готового плана или карты обследуемой территории или помещения. Таким образом, подобная система сбора данных в прямом смысле слова может считаться автономной, не зависящей от внешних факторов и наличия или отсутствия исходных данных об обследуемой территории или помещения.
Однако при всей привлекательности у технологии SLAM есть существенный недостаток, связанный с тем, что определение местоположения АДУ, т.е. их координат, которые в данном случае можно назвать относительными координатами, напрямую связано с данными, получаемыми в процессе обследования территории или помещения.
Во-первых, при использовании технологии SLAM на систему сбора данных ложится большая вычислительная нагрузка, обусловленная необходимостью не только собирать, хранить и обрабатывать данные о территории обследования и находящихся на ней объектах, но и использовать эти данные для определения относительных координат АДУ, причем указанное определение относительных координат должно осуществляться в режиме реального времени. В случае использования нескольких АДУ такая нагрузка на систему сбора данных многократно возрастает.
Во-вторых, точность привязки относительных координат к объектам на обследуемой территории в большой степени зависит от формы объектов, их свойств, в частности отражательных свойств, постоянства свойств при сканировании объекта с разных сторон и других факторов. Эти факторы заранее могут быть неизвестны, а значит, и точность определения относительных координат является величиной непостоянной и непредсказуемой.
В-третьих, что является наиболее существенным недостатком технологии SLAM, погрешность определения относительных координат, обусловленная вышеуказанными недостатками, накапливается в процессе перемещения АДУ. По этой причине точность определения относительных координат, следовательно, и конечная карта или план обследуемой территории или помещения являются приемлемыми лишь для больших, мало заполненных пространств, к которым не предъявляются высокие требования к пространственной точности определения положения объектов, их геометрической форме и характеристикам.
Таким образом, несмотря на всю привлекательность технологии SLAM, которую можно считать ближайшим аналогом настоящего изобретения, ее использование для получения высокоточных данных, например, о внутреннем пространстве и характеристиках промышленного помещения, заполненного оборудованием сложной формы, не представляется возможным. По этой причине, в случае необходимости получения геометрических данных о пространстве и размещенных в нем объектах с высокой пространственной точностью до сих пор применяется лазерное сканирование пространства оператором.
Сущность изобретения
Задачей настоящего изобретения является разработка способа высокоточного позиционирования (определения локальных координат), а также соответствующей системы высокоточного позиционирования множества автономных движущихся устройств, являющихся компонентами системы сбора данных, предназначенной для сбора данных об ограниченном пространстве произвольной геометрии. Способ и система высокоточного позиционирования должны устранить недостатки известных технических решений, включая упомянутые выше недостатки ближайшего аналога. В частности, предлагаемые способ и система высокоточного позиционирования обеспечивают автоматизированное и автономное получение данных повышенной точности о положении множества автономных движущихся устройств в ограниченном пространстве произвольной геометрии. При этом отпадает необходимость использования предварительно созданного плана пространства и размещенных в нем объектов, предварительной подготовки ограниченного пространства, уточнения координат автономных движущихся устройств в процессе их перемещения, а также необходимость использования систем определения абсолютных (глобальных) координат автономных движущихся устройств.
Техническим результатом настоящего изобретения является повышение точности определения координат местоположения множества автономных движущихся устройств с обеспечением автономности и полной автоматизации процесса получения данных.
Поставленная задача решается, а заявленный технический результат достигается в заявленном способе определения локальных координат множества автономных движущихся устройств в ограниченном пространстве произвольной геометрии за счет того, что способ включает следующие стадии:
- размещение в указанном пространстве по меньшей мере одной базовой метки (БМ), входящей в состав управляющей станции (УС) и включающей модуль лазерной дальнометрии БМ и модуль беспроводной связи БМ, и по меньшей мере двух автономных движущихся устройств (АДУ), каждое из которых включает модуль определения локальных координат АДУ, содержащий блок инерциальной навигации АДУ и блок лазерной дальнометрии АДУ;
- определение первичной локальной координаты каждого из АДУ относительно БМ посредством взаимодействия блока лазерной дальнометрии АДУ с модулем лазерной дальнометрии БМ и последующей передачи данных об определенной локальной координате соответствующему АДУ посредством беспроводного обмена данными между АДУ и БМ;
- изменение положения (смещение) в указанном пространстве каждого из АДУ с обеспечением для каждого из них прохождения множества точек указанного пространства и получения в каждой точке из указанного множества точек данных о локальных координатах АДУ на основе данных блока инерциальной навигации АДУ; и
- корректировку данных о локальных координатах АДУ в каждой точке из указанного множества точек на основе взаимодействия блока лазерной дальнометрии АДУ с:
а) модулем лазерной дальнометрии БМ, когда указанный модуль лазерной дальнометрии БМ находится в зоне прямой видимости указанного АДУ,
б) блоком лазерной дальнометрии другого АДУ, когда модуль лазерной дальнометрии БМ не находится в зоне прямой видимости данного АДУ,
с по существу одновременным беспроводным обменом данными между АДУ и БМ о координатах АДУ,
причем в любой момент времени по крайней мере одно АДУ находится в зоне прямой видимости модуля лазерной дальнометрии БМ.
Поставленная задача решается, а заявленный технический результат достигается также в заявленной системе определения локальных координат автономного движущегося устройства (АДУ) в составе системы сбора данных, характеризующих ограниченное пространство произвольной геометрии и размещенные в нем объекты, за счет того, что система включает управляющую станцию (УС), не менее двух АДУ и пусковую площадку, причем УС содержит модуль определения локальных координат, который включает по меньшей мере одну базовую метку (БМ) отсчета локальных координат, содержащую модуль лазерной дальнометрии БМ и модуль беспроводной связи БМ, а каждое АДУ включает модуль жизнеобеспечения, модуль сбора данных, модуль фото- и/или видеофиксации, модуль предотвращения столкновений и модуль определения локальных координат АДУ.
Модуль лазерной дальнометрии БМ может оснащаться лидаром (лазерным сканером) и служит для определения расстояния между БМ и АДУ в процессе осуществления исследовательской миссии, в частности, для уточнения координат АДУ в системе координат БМ.
Управляющая станция управляет БМ и АДУ, отслеживает положение АДУ в исследуемом пространстве, осуществляет прием и синхронизацию поступающих от АДУ данных, а также построение трехмерной модели исследуемого пространства и трехмерного поля измеряемых характеристик в исследуемом пространстве. УС оснащена станцией беспроводной связи, обеспечивающей взаимодействие компонентов системы посредством соответствующих модулей связи в режиме реального времени.
Если одно из множества задействованных в исследовании пространства АДУ не находится в зоне прямой видимости модуля лазерной дальнометрии БМ, система обеспечивает возможность применения другого АДУ из указанного множества в качестве мобильной (подвижной) опорной метки дополнительной локальной системы координат, связанной с системой координат, задаваемой БМ. Это другое АДУ (АДУ-ретранслятор координат БМ) должно находиться в зоне прямой видимости модуля лазерной дальнометрии БМ либо в зоне прямой видимости третьего АДУ, которое, в свою очередь, находится в зоне прямой видимости модуля лазерной дальнометрии БМ.
Преимущественно, под ограниченным пространством произвольной геометрии в рамках данной заявки понимаются помещения, здания, сооружения, в том числе промышленного типа, ограниченные физическими барьерами или прилегающими территориями, в том числе помещения сложной формы; разрушенные помещения; помещения, заполненные большим количеством оборудования; помещения, характеризующиеся высокой температурой воздуха и/или поверхностей, повышенной вибрацией, радиацией, электромагнитным излучением и другими параметрами, которые ограничивают или даже не допускают участие человека в проведении обследования такого пространства.
Под объектами, размещенными в указанном ограниченном пространстве, в рамках данной заявки понимаются инженерные сооружения, строительные конструкции, устройства, оборудование, предметы и т.п., то есть преимущественно объекты промышленного назначения.
Под автономными движущимися устройствами (АДУ) в рамках данной заявки понимаются движущиеся устройства, такие как самоходные тележки, роботы, дроны и подобные им устройства, способные заданное время в автономном режиме, т.е. без вмешательства со стороны оператора, совершать перемещения на плоскости и/или в пространстве.
Под локальными координатами в рамках данной заявки понимаются координаты, отсчитываемые от произвольно выбранной или заданной точки обследуемого пространства (идентифицируемого в рамках рассматриваемого изобретения соответствующей базовой меткой) и не привязанные к объектам вне обследуемого пространства, равно как не привязанные к абсолютным координатам, определяемым, например, с использованием системы глобального позиционирования. Локальные координаты также не привязаны к каким-либо объектам, принадлежащим обследуемому пространства.
Система сбора данных об ограниченном пространстве произвольной геометрии, компонентами которой являются автономные движущиеся устройства, может представлять собой роботизированный автоматический комплекс для дистанционного зондирования закрытых помещений без присутствия оператора в обследуемом помещении. В общем случае система сбора данных состоит из управляющей станции, множества АДУ и пусковой площадки.
Каждое АДУ оснащается модулем сбора данных, который может включать контактные или бесконтактные средства измерения того или иного параметра/характеристика объектов исследуемого пространства или его среды. Кроме того, АДУ можно оснастить модулем фото- и/или видеофиксации, что позволит в совокупности с другими датчиками проводить идентификацию объектов внутри исследуемого пространства.
Данные, собранные АДУ в процессе выполнения задания, в режиме реального времени отправляются на управляющую станцию посредством обмена с БМ посредством известных технологий беспроводной передачи данных либо хранятся в блоке хранения данных модуля жизнеобеспечения АДУ.
Пусковая площадка системы сбора данных формируется из стартовых пластин. Стартовая пластина предназначена для обеспечения учета, старта, посадки, подзарядки АДУ, а кроме того, опционально, для обеспечения возможности приема данных, полученных АДУ в процессе выполнения задания.
Управляющая станция (УС) включает модуль определения локальных координат, устройство долговременного хранения данных, терминал ввода данных, модуль электроснабжения, станцию беспроводной связи и вычислительный модуль. УС реализует управление БМ и АДУ, отслеживает местоположение АДУ в исследуемом пространстве, осуществляет сбор и синхронизацию данных, поступающих от АДУ через базовую метку (БМ), и выполняет построение модели исследуемого пространства и поля измеряемых характеристик его объектов или параметров его среды.
Модуль определения локальных координат УС может включать одну или более БМ для отсчета локальных координат. Каждая БМ включает модуль лазерной дальнометрии и модуль беспроводной связи.
Если применяется несколько БМ, одно или несколько АДУ могут определять свои локальные координаты по одной или нескольким БМ.
Основным отличием заявленного изобретения от известных аналогов является применение лазерной дальнометрии в совокупности с инерциальной навигацией, а также возможность определения локальных координат данного АДУ посредством организации на основе других АДУ цепочки взаимосвязанных локальных систем координат в случае отсутствия прямой видимости между данным АДУ и БМ, что обеспечивает точность позиционирования автономных движущихся устройств в ограниченном пространстве произвольной геометрии.
Далее изобретение подробно описывается со ссылками на фигуры, на которых представлены частные варианты реализации и функционирования системы сбора данных, используемой для обследования помещения с размещенными в нем объектами, например, промышленным оборудованием, и ее компоненты.
Краткое описание фигур
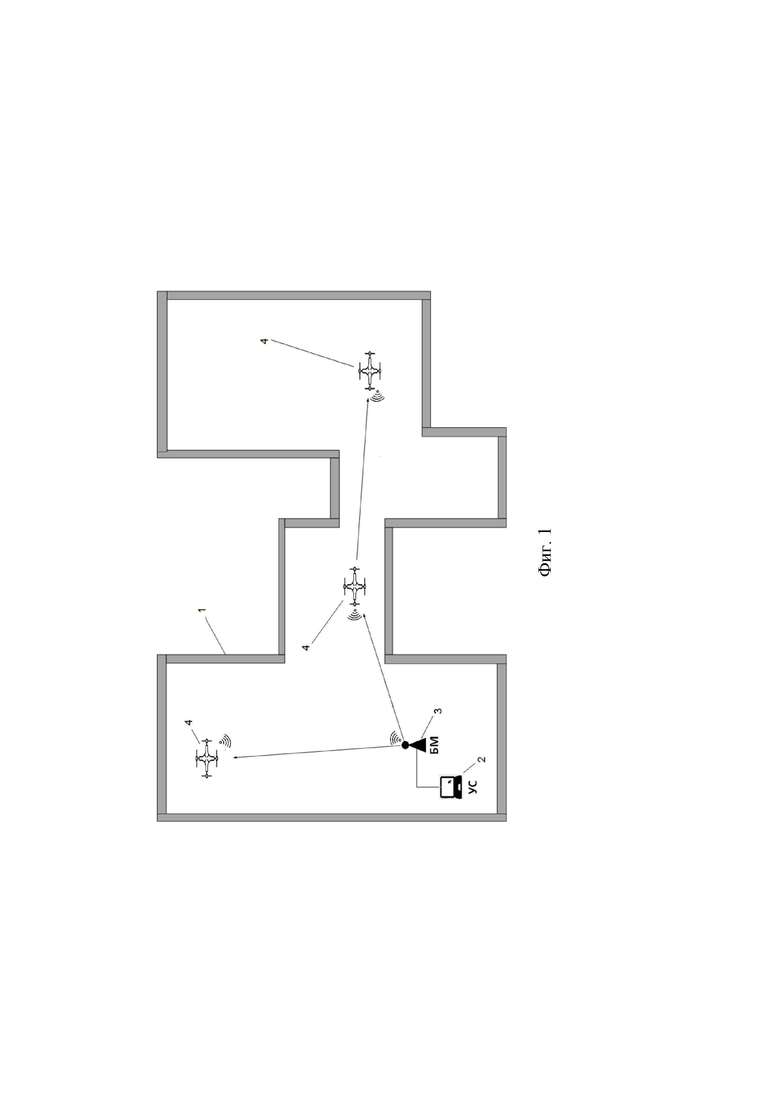
На фиг. 1 представлен общий вид системы, реализующей описываемое изобретение.
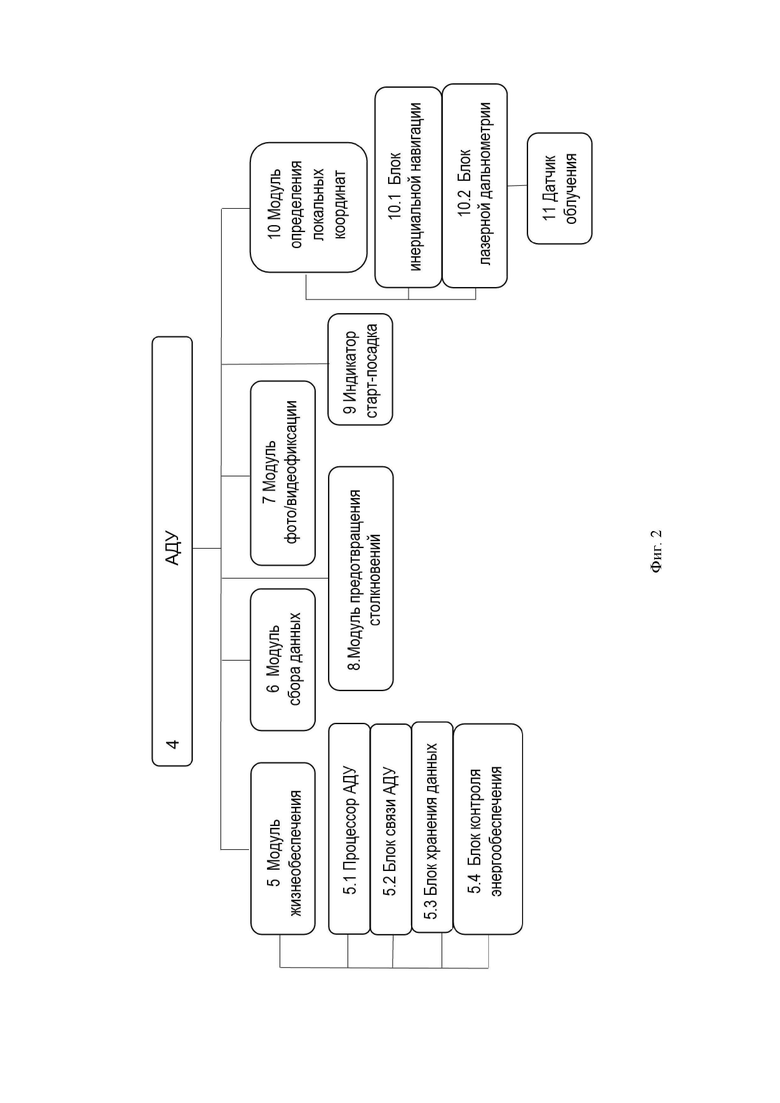
На фиг. 2 показаны основные компоненты АДУ.
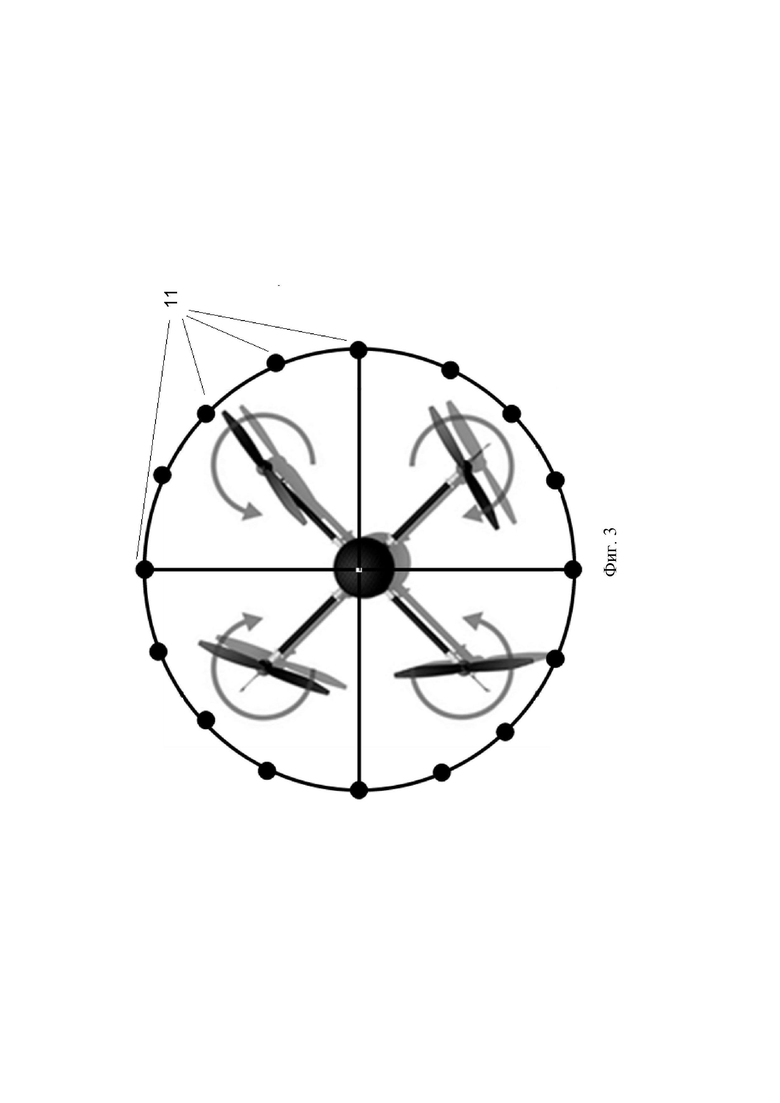
На фиг. 3 показано АДУ с размещенными на его корпусе с заданным шагом датчиками облучения лазером.
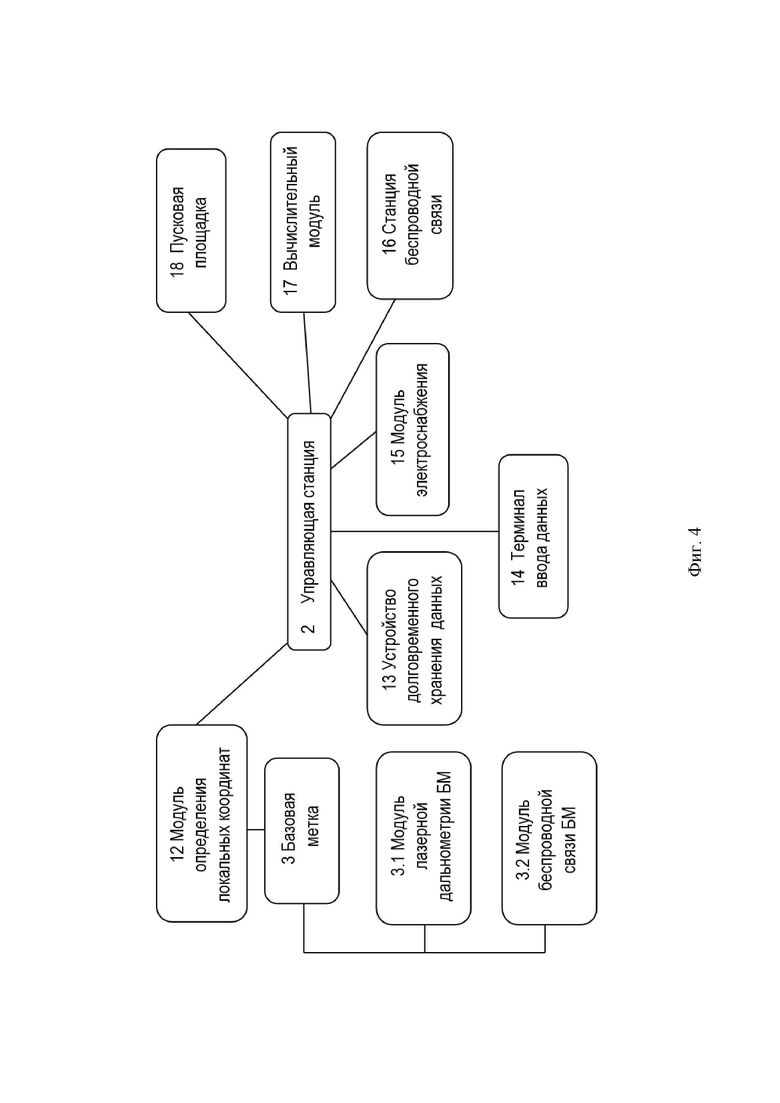
На фиг. 4 представлены основные компоненты управляющей станции.
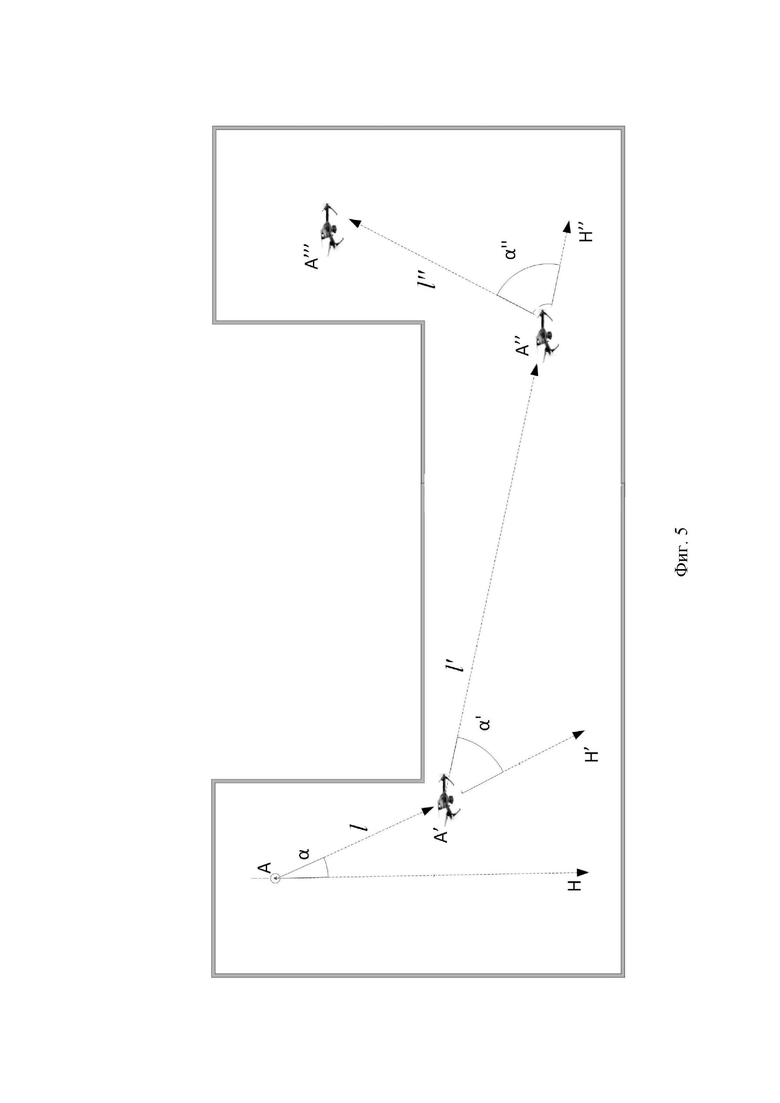
На фиг. 5 показана организованная на основе АДУ цепочка взаимосвязанных систем координат в случае отсутствия прямой видимости между одним из АДУ и базовой меткой.
Подробное описание изобретения
Для обеспечения возможности обследования ограниченного пространства произвольной формы (1) система сбора данных в общем случае представляет собой мобильный и легко транспортируемый инженерный комплекс, состоящий из управляющей станции (УС) (2), в частном варианте – наземного базирования, компонентом которого является по меньшей мере одна базовая метка (БМ) (3), и множества специализированных малогабаритных мобильных автономных движущихся устройств (АДУ) (4), например дронов и/или самоходных устройств различного назначения, способных в требуемые сроки осуществить дистанционное обследование ограниченного пространства произвольной формы (1), например, закрытого пространства сложной геометрической конфигурации (фиг. 1).
АДУ (4) при выполнении задания выполняет две функции: сбор данных об обследуемом пространстве и определение координат.
Каждое АДУ (4) может включать модуль жизнеобеспечения (5), отвечающий за функционирование АДУ при выполнении задания (фиг. 2). Модуль жизнеобеспечения (5) может включать контрольно-вычислительный блок (процессор) (5.1); блок связи (5.2), выполненный с возможностью осуществления связи (передачи данных) между АДУ (4) и УС (2) через БМ (3) и с другими АДУ (4); блок хранения данных (5.3); блок контроля энергообеспечения (5.4) и др. Модуль жизнеобеспечения (5) может включать и другие блоки, назначение и функционал которых хорошо известны специалисту в области техники.
Сбор данных осуществляется посредством установленного на АДУ (4) модуля сбора данных (6), который может включать средства измерения того или иного параметра объекта или среды. Используя известные устройства измерения параметров объекта или среды, возможно определить, в частности, температуру окружающей среды в точке замера; температуры сканируемой поверхности; атмосферное давление в точке замера; вибрационные характеристики исследуемой поверхности; влажность в точке замера; компонентный состав окружающей среды; электромагнитные характеристики исследуемой поверхности; альфа-, бета-, гамма-спектрометрические характеристики в точке замера; коэффициент светоотражения поверхности; шероховатость поверхности и другие виды параметры окружающей среды и исследуемых объектов и пространства.
Собранные данные в режиме реального времени посредством известных технологий беспроводной передачи данных отправляются в частном случае на УС (2), а при невозможности или нежелательности использования беспроводных технологий передачи данных хранятся в блоке хранения данных (5.3) модуля жизнеобеспечения для последующей доставки к месту приема данных, например, к блоку приема данных стартовой пластины.
Одним из видов исследований может являться идентификация объектов внутри обследуемого пространства. Для этого возможно оснастить АДУ (4) модулем фото- и/или видеофиксации (7). В случае одновременного исследования геометрии пространства и идентификации объектов координатно-привязанная фото- и/или видеофиксация надписей, схематических обозначений, штрих-кодов на ключевых конструктивных элементах обследуемого помещения и размещенных в нем объектов значительно повысит качество интерпретации объектов, расположенных в пределах обследуемого пространства (в частности, облегчится идентификация сложного инженерного оборудования помещений промышленного назначения).
С целью предотвращения столкновений с подвижными или неподвижными объектами, а также между собой, АДУ (4) могут снабжаться средствами предотвращения столкновений, включенными в модуль предотвращения столкновений (8). Особенно это актуально при большом количестве используемых в обследовании АДУ (4), ожидаемой сложной геометрии обследуемого пространства, ожидаемом большом количестве объектов в обследуемом пространстве и т.п. Указанные средства предотвращения столкновений могут функционировать по принципу ультразвукового сонара, или системы машинного стереоскопического зрения, или на основе другого принципа, позволяющего оперативно вычислять наличие преград на пути движения АДУ (статических, таких как компоненты оборудования, трубопроводы или другие элементы исследуемого ограниченного пространства; динамических, таких как другие АДУ (4), исследующие пространство).
Опционально АДУ (4) могут быть оснащены индикаторами «старт-посадка» (9), расположенными, например, на несущей раме, которые сигнализируют об успешном размещении АДУ (4) на стартовых пластинах.
Неотъемлемым компонентом АДУ (4) в рамках заявленного изобретения является модуль определения локальных координат (10). В состав модуля определения локальных координат АДУ (10) входят блок инерциальной навигации (10.1) и блок лазерной дальнометрии (10.2).
Блок инерциальной навигации (10.1) включает датчики инерциальной системы позиционирования, а также датчики измерения углов тангажа, крена и рыскания, измеряющие мгновенные углы поворота осей собственной системы координат АДУ (4) в исследуемом пространстве.
Блок лазерной дальнометрии (10.2) включает гиростабилизированный лазерный сканер заданной длины волны, обеспечивающий сканирование в заданном объеме, а также требуемые параметры по точности и дальности измерения геометрических размеров сканируемых объектов внутри исследуемого ограниченного пространства произвольной формы. Сканер жестко координирован относительно геометрического центра АДУ (4). Кроме того, блок лазерной дальнометрии (10.2) включает датчики облучения (11) (фиг. 3), фиксирующие облучение лазерным лучом заданных длин волн, соответствующих длине волны лазера БМ (3) или лазерных сканеров прочих АДУ (4). Такие датчики облучения (11) выполняются в виде точечных приемников лазерного излучения, расположенных и жестко закрепленных на поверхности конструкции АДУ (4) таким образом, что положение каждого из датчиков облучения (11) относительно геометрического центра АДУ (4) точно известно. С целью повышения вероятности регистрации облучения датчиков облучения (11) возможно увеличить их количество, например, разместив их на одном или более обручах, опоясывающих корпус АДУ (4), как показано на фиг. 3.
В общем случае каждое АДУ (4) может посредством беспроводной связи осуществлять взаимосвязь с УС (2) и/или другими АДУ (4) для обмена данными.
В особых случаях, когда осуществление беспроводной связи по тем или иным причинам исключается или невозможно, АДУ (4) выполняет задание в автономном режиме. Сбор данных в этом случае осуществляется в блок хранения данных модуля жизнеобеспечения.
Управляющая станция (2) в общем случае включает (фиг. 4) модуль определения локальных координат (12), устройство долговременного хранения данных (13), терминал ввода данных (14), модуль энергоснабжения (15), станцию беспроводной связи (16), вычислительный модуль (17) и пусковую площадку (18).
Модуль определения локальных координат выполнен с возможностью обеспечения определения локальных координат АДУ (4) и включает по меньшей мере одну БМ (3), обеспечивающую точку отсчета локальных координат. Каждая БМ (3) включает модуль лазерной дальнометрии БМ (3.1) и модуль беспроводной связи БМ (3.2). По существу, модуль лазерной дальнометрии БМ (3.1) выполняют в виде лазерного сканера требуемой точности и дальности действия, позволяющего проводить высокоточные измерения расстояний на дальностях, соответствующих геометрическим размерам исследуемого ограниченного пространства произвольной формы. Модуль беспроводной связи БМ (3.2) выполнен с возможностью осуществления многоканальной беспроводной связи с АДУ (4) для обеспечения двустороннего обмена информацией в реальном времени.
Устройство долговременного хранения данных (13) выполнено с возможностью хранения данных, полученных в ходе выполнения задания средствами измерения модуля сбора данных (6), и/или модулем фото/видеофиксации (7), и/или модулем определения локальных координат АДУ (10) каждого АДУ (4), и/или данных, полученных блоком приема данных каждой стартовой пластины. Устройство долговременного хранения данных (13) по существу представляет собой известные устройства-накопители типа Flash-память, SSD, HDD и т.п.
Терминал ввода данных (14) обеспечивает возможность ввода командных данных в систему сбора данных, в частности, в УС (2). Опционально, УС (2) может не оснащаться собственным физическим терминалом ввода данных (14), а для управления ею может использоваться любой удаленный терминал, например, планшет, ноутбук, компьютер, смартфон и т.п., снабженный специализированным приложением, или программой, для управления системой сбора данных.
Модуль электроснабжения (15) УС (2) выполнен с возможностью контролировать и регулировать электроснабжение непосредственно УС (2), пусковой площадки (18), сформированной из стартовых пластин, и опосредованно отвечает за энергоснабжение всех АДУ (4), выбранных для выполнения задания. Энергоснабжение УС (2) и пусковой площадки (18) осуществляется либо от электрической сети, либо от комплекта аккумуляторных батарей.
Станция беспроводной связи (16) УС (2) обеспечивает возможность беспроводной передачи данных между всеми компонентами системы сбора данных по известным технологиям беспроводной передачи данных, например, Wi-Fi, Bluetooth и др.
Вычислительный модуль (17) УС (2) на основе данных, полученных модулем сбора данных (6) АДУ (4), модулем определения локальных координат АДУ (10), модулем фото/видеофиксации (7), выполняет построение распределения свойств исследуемого пространства в объеме.
Пусковая площадка (18) сформирована из стартовых пластин (на фигурах не показаны), которые предназначены для учета выбранных для задания АДУ (4), первоначального размещения АДУ (4), старта и посадки АДУ (4), подзарядки АДУ (4), приема данных от АДУ (4) и др.
Далее на фиг. 5 в упрощенном виде, с использованием двумерной полярной системы координат иллюстрируется основная идея заявленного способа и системы определения локальных координат.
Базовая метка (А) отсчета локальных координат в исследуемом ограниченном пространстве произвольной формы формирует начало координат (полюс) полярной системы координат локальной системы координат А. На фиг. 5 введены следующие обозначения:
H – нулевой луч (полярная ось) системы координат А;
А’ – АДУ, формирующий локальную систему координат А’;
А’’ – АДУ, формирующий локальную систему координат А’’;
А’’’ – АДУ, использующий в качестве мобильной опорной метки локальную систему координат А’’, формируемую АДУ А’’;
l – радиальная координата АДУ А’ в системе координат А;
α – угловая координата АДУ А’ в системе координат А;
H’ – нулевой луч системы координат А’;
l’ – радиальная координата АДУ А’’ в системе координат А’;
α’ – угловая координата АДУ А’’ в системе координат А’;
H’’ – нулевой луч системы координат А’;
l" – радиальная координата АДУ А’’’ в системе координат А’’;
α" – угловая координата АДУ А’’’ в системе координат А’’.
Специалисту в области техники понятно, что в общем случае в трехмерной полярной системе координат вместо одной угловой координаты добавляются две угловые координаты – соответственно зенитный и азимутальный углы.
Система работает следующим образом.
Перед началом исследовательской миссии оператор посредством терминала управляющей станции задает:
- границы объема и/или площади, в рамках которых должны перемещаться АДУ (4) относительно БМ (3). Задание такого граничного объема (или площади) определяет максимальную зону допустимого перемещения АДУ (4);
- (опционально) примерное расположение БМ (3) в исследуемом пространстве ограниченного объема;
- примерное расположение каждой стартовой пластины относительно УС (2) (если пластины сгруппированы в единый блок, в котором известно расположение каждой пластины, то задается примерное расположение всего блока в целом);
- конкретные АДУ (4), размещенные на стартовых пластинах, которые будут использоваться в исследовательской миссии;
- (опционально) примерные направления перемещений для АДУ (4) в процессе их исследовательской миссии в исследуемом пространстве.
С запуском исследовательской миссии выбранные АДУ (4) стартуют со стартовых пластин каждый на определенную высоту таким образом, чтобы все АДУ (4) были легко доступны для видимости, или облучения, лазером модуля лазерной дальнометрии БМ (3.1). Далее БМ (3) автоматически определяет высоты, на которых зависают АДУ (4), в ожидании облучения для определения их начальных координат. Каждое АДУ (4) посредством взаимодействия блока связи АДУ (5.2) и модуля беспроводной связи БМ (3.2) информирует УС (2) о реально достигнутой высоте и ожидает облучения своего датчика со стороны модуля лазерной дальнометрии БМ (3.1) для вычисления точной начальной локальной координаты своей миссии. В свою очередь, УС (2), обладая информацией о примерном расположении стартовых пластин, с которых взлетели АДУ (4), и высоте парения каждого АДУ (4), последовательно облучает лазерным лучом модуля лазерной дальнометрии БМ (3.1) телесные углы, в пределах которых предположительно должны находиться применяемые в исследовательской миссии АДУ(4). Модуль лазерной дальнометрии БМ (3.1) облучает пространство последовательно до получения от АДУ (4) подтверждения облучения и определения, таким образом, АДУ (4) своей начальной координаты в системе координат БМ (3).
При этом процесс вычисления начальной координаты, а равно и последующих уточнений координат АДУ в процессе выполнения исследовательской миссии, происходит следующим образом. Зафиксировав датчиками облучения (11) облучение лазера модуля лазерной дальнометрии БМ (3.1), АДУ (4) посредством взаимодействия блока связи АДУ (5.2) и модуля беспроводной связи БМ (3.2) уведомляет УС (2) о факте облучения датчиков (11), которая, в свою очередь, в ответ передает АДУ (4) координаты его облученного датчика в системе координат БМ (3). АДУ (4) с использованием данной информации, текущих показателей датчиков измерения углов тангажа, крена и рыскания, а также зная известное положение облученного датчика в собственной связанной системе координат, вычисляет текущие координаты геометрического центра АДУ (4) в системе координат БМ (3). Получив таким образом координаты геометрического центра АДУ (4), каждый АДУ (4) задает начальную координату для своих датчиков инерциальной системы позиционирования.
Далее АДУ (4) начинают исследовательскую миссию – выполняют полетное задание, сформированное УС, с одновременным сканированием окружающего пространства и сбором измеряемых характеристик исследуемого пространства. Полетное задание для АДУ (4) формируется и постоянно корректируется УС (2) на основе данных блока лазерной дальнометрии (10.2), данных его модуля предотвращения столкновений (8), определенной оператором для данного АДУ (4) максимальной зоны и приблизительного направления перемещения, текущего уровня заряда батареи и других параметров.
Между сеансами облучения со стороны БМ (3) или другого АДУ (4) автономные движущиеся устройства вычисляют свои текущие координаты (координаты геометрического центра АДУ) посредством датчиков блока инерциальной навигации (10.1).
В процессе исследований АДУ (4) в непрерывном режиме производят запись получаемых данных лазерного сканирования пространства, данных измерений исследуемых характеристик пространства, а также соответствующих координат их сбора в собственную память с одновременной частичной или полной их передачей на УС (2). Таким образом, оператор имеет возможность в реальном масштабе времени на терминале УС (2) наблюдать построение трехмерной модели исследуемого пространства из облаков точек лазерного сканирования, а также трехмерного распределения в ней параметров измеряемых характеристик пространства.
На основе передаваемых АДУ(4) данных УС (2) постоянно отслеживает местоположения АДУ (4) в исследуемом пространстве и через заданные интервалы времени или по другому алгоритму (например, вычисляющему, что координаты АДУ, определяемые им за счет инерциальной системы навигации, вышли за установленные пределы погрешности) направляет лазер модуля лазерной дальнометрии БМ (3.1) в телесный угол, потенциально охватывающий траекторию текущего перемещения очередного АДУ (4) для облучения его датчиков в целях уточнения текущих координат АДУ (4) в системе координат БМ (3). При попадании лазерного луча модуля лазерной дальнометрии БМ (3.1) на датчик облучения (11) АДУ (4) производит уточнение своих текущих координат как описано выше. При этом само АДУ (4) или УС (2) (в зависимости от конкретной реализации системы) производит по определенному алгоритму пересчет на величину вычисленной пространственной поправки координат точек всех предыдущих проведенных измерений, полученных от инерциальной системы позиционирования АДУ (4) с момента предыдущего облучения.
В процессе своего движения АДУ (4) может выйти из зоны прямой доступности луча лазерного сканера модуля лазерной дальнометрии БМ (3.1). Для каждого АДУ (4) управляющая станция (2) постоянно определяет вероятность такого события, анализируя данные лазерного сканирования АДУ (4) и планируя траекторию его перемещения в исследуемом пространстве.
Далее подробно описывается вариант работы системы определения локальных координат, когда одно из АДУ (4), для наглядности далее именуемое «дезориентированное АДУ», вышло из зоны прямой видимости модуля лазерной дальнометрии БМ (3.1), то есть ни один из датчиков облучения (11) дезориентированного АДУ не может быть облучен лазерным сканером модуля лазерной дальнометрии БМ (3.1).
В данной ситуации УС (2), исходя из анализа уже известной топологии исследуемого пространства, из всего массива остальных задействованных в исследовательской миссии АДУ (4) выбирает наиболее оптимально расположенный в пространстве АДУ (4). Выбранный АДУ (4), для наглядности далее именуемый «АДУ-ретранслятор», должен находиться, с одной стороны, в зоне прямой видимости модуля лазерной дальнометрии БМ (3.1), а с другой стороны – в зоне прямой видимости датчиков облучения (11) дезориентированного АДУ. При наличии доступного незадействованного в исследовательской миссии АДУ (4), расположенного на стартовой пластине, УС (2) может назначить его АДУ-ретранслятором и направить его для уточнения координат дезориентированного АДУ, находящегося вне зоны прямой видимости БМ (3). Такой АДУ-ретранслятор по существу выполняет функцию временной базовой метки для дезориентированного АДУ, что позволяет уточнить координаты дезориентированного АДУ.
Достигнув заданной УС (2) точки пространства, АДУ-ретранслятор переходит из режима сканирования пространства в режим направленного облучения дезориентированного АДУ и фокусирует работу своего лазерного сканера в заданном телесном угле, в рамках которого предположительно должно перемещаться дезориентированное АДУ. Зафиксировав датчиком облучение лазером от АДУ-ретранслятора, дезориентированное АДУ посредством своего блока связи (5.2) направляет сигнал о факте фиксации облучения лазера на АДУ-ретранслятор или УС (2), в зависимости от варианта осуществления изобретения. В ответ на этот сигнал АДУ-ретранслятор или УС (2) пересылает дезориентированному АДУ актуальные координаты его облученного датчика в системе координат БМ, исходя из которых дезориентированное АДУ, как описано выше, может вычислить свои актуальные координаты, задать уточнение своей инерциальной системе позиционирования, а также пересчитать координаты всех предыдущих измерений, выполненных с предыдущего облучения датчика дезориентированного АДУ лазерным лучом базовой метки (3) или лазерным лучом АДУ-ретранслятора.
Далее УС (2) использует подобный АДУ-ретранслятор координат в качестве временной базовой метки для всех АДУ (4) вне зоны прямой видимости лазерного луча БМ (3), выполняющих исследовательскую миссию в данной удаленной области исследуемого пространства. При возвращении АДУ (4) из данной области пространства, т.е. зоны вне прямой видимости, обратно в зону прямой видимости БМ (3), УС (2) может использовать АДУ-ретранслятор для иных целей, например, для исследования других областей пространства.
В случае, если исследовательские АДУ (4) продолжают удаляться от зоны прямой видимости БМ (3), АДУ-ретранслятор также перемещается таким образом, чтобы продолжать находиться как в зоне прямой видимости модуля лазерной дальнометрии БМ (3.1), так и держать в зоне прямой видимости своего блока лазерной дальнометрии (10.2) датчики облучения (11) дезориентированных АДУ. Если АДУ-ретранслятор в процессе следования за исследовательскими дезориентированными АДУ покинет зону прямой видимости модуля лазерной дальнометрии БМ (3.1), УС (2) либо прекращает исследование данной области пространства удалившимися АДУ, либо направляет дополнительный (новый) АДУ-ретранслятор для формирования цепочки АДУ-ретрансляторов.
Таким образом, настоящее изобретение позволяет осуществлять высокоточное позиционирование множества АДУ системы автономного сбора данных об ограниченном пространстве произвольной формы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТРОЕНИЯ ЦИФРОВОЙ ИСПОЛНИТЕЛЬНОЙ ИНЖЕНЕРНО-РАДИАЦИОННОЙ МОДЕЛИ ОСТАНОВЛЕННОГО ДЛЯ ВЫВОДА ИЗ ЭКСПЛУАТАЦИИ ОБЪЕКТА ИСПОЛЬЗОВАНИЯ АТОМНОЙ ЭНЕРГИИ ПРИ ВЫПОЛНЕНИИ КОМПЛЕКСНОГО ИНЖЕНЕРНОГО И РАДИАЦИОННОГО ОБСЛЕДОВАНИЯ УКАЗАННОГО ОБЪЕКТА И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ УКАЗАННОГО СПОСОБА | 2022 |
|
RU2815600C1 |
| СИСТЕМА КОМБИНИРОВАННОГО ТРЕКИНГА | 2019 |
|
RU2734553C1 |
| Способ определения взаимного расположения объектов | 2024 |
|
RU2839569C1 |
| Способ определения координат группы летательных аппаратов при межсамолетной навигации | 2020 |
|
RU2738039C1 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| СПОСОБ НАВИГАЦИИ В ПОМЕЩЕНИИ И РАДИОНАВИГАЦИОННЫЙ ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2838877C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| АВТОНОМНАЯ ОПТИЧЕСКАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И НАВИГАЦИИ | 2023 |
|
RU2816087C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ОРИЕНТАЦИИ УСТРОЙСТВА ПОЛЬЗОВАТЕЛЯ С ПРИВЯЗКОЙ К ВИЗУАЛЬНЫМ ОСОБЕННОСТЯМ ОКРУЖЕНИЯ | 2022 |
|
RU2828682C2 |
Изобретение относится к способам и системам определения локальных координат автономных движущихся устройств (АДУ) в составе системы сбора данных об ограниченном пространстве произвольной формы и находящихся в указанном пространстве объектах. Способ определения локальных координат включает размещение в указанном ограниченном пространстве базовой метки (БМ) отсчета локальных координат, включающей модуль лазерной дальнометрии и модуль беспроводной связи, и по меньшей мере двух АДУ, каждое из которых включает модуль определения локальных координат, содержащий блок инерциальной навигации и блок лазерной дальнометрии, определение первичной координаты каждого из АДУ относительно БМ посредством взаимодействия с модулем лазерной дальнометрии БМ, изменение положения каждого из АДУ с обеспечением для каждого из них прохождения множества точек указанного пространства и получения в каждой точке данных о локальных координатах на основе данных блока инерциальной навигации, и корректировку данных о локальных координатах, полученных на основе данных блока инерциальной навигации, посредством взаимодействия с модулем лазерной дальнометрии БМ, если БМ находится в зоне прямой видимости указанного АДУ, и с блоком лазерной дальнометрии другого АДУ, если БМ не определяется в зоне прямой видимости данного АДУ. Также заявлена система для реализации указанного способа определения локальных координат. Технический результат заключается в повышении точности определения локальных координат АДУ при исследовании ими ограниченного пространства произвольной геометрии без возможности использования систем глобального позиционирования. 2 н. и 6 з.п. ф-лы, 5 ил.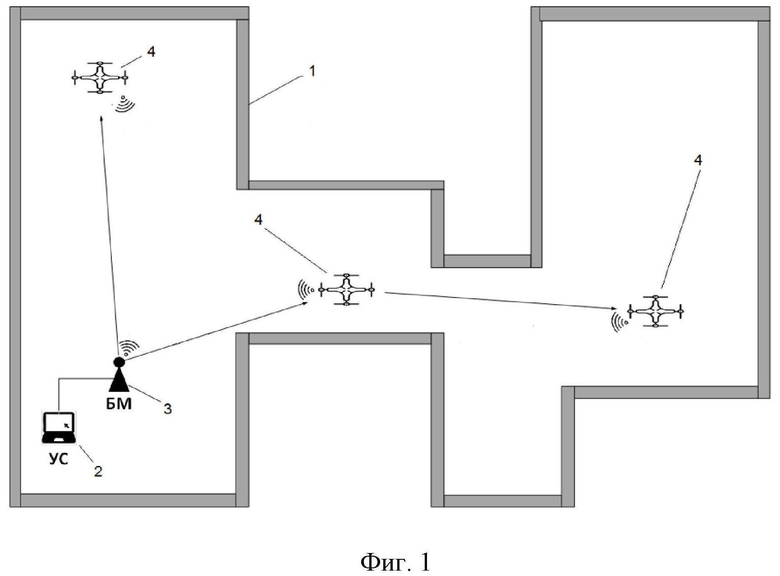
1. Способ определения локальных координат автономного движущегося устройства (АДУ) в составе системы сбора данных, характеризующих ограниченное пространство произвольной геометрии и размещенные в нем объекты, имеющей в своем составе управляющую станцию, по меньшей мере два АДУ и стартовую площадку, включающий:
а) размещение в указанном ограниченном пространстве произвольной геометрии базовой метки (БМ) отсчета локальных координат и по меньшей мере двух АДУ, каждое из которых включает модуль определения локальных координат;
б) определение первичной локальной координаты для каждого АДУ относительно базовой метки посредством взаимодействия модуля определения локальных координат с базовой меткой;
в) корректировку локальных координат движущегося АДУ, полученных на основе данных модуля определения локальных координат АДУ, посредством взаимодействия:
в1) с базовой меткой, если базовая метка находится в зоне прямой видимости указанного АДУ; или
в2) если базовая метка не находится в зоне прямой видимости указанного АДУ, с модулем определения локальных координат другого АДУ, для которого базовая метка находится в зоне прямой видимости,
с по существу одновременным беспроводным обменом данными между АДУ и БМ о координатах АДУ,
причем в зоне видимости базовой метки находится по меньшей мере одно АДУ.
2. Способ определения локальных координат по п. 1, отличающийся тем, что этап в) дополнительно включает:
- облучение датчиков облучения блока лазерной дальнометрии данного АДУ средствами блока лазерной дальнометрии БМ или другого АДУ;
- детектирование датчиками облучения блока лазерной дальнометрии данного АДУ облучения лазерным лучом блока модуля лазерной дальнометрии БМ или блока лазерной дальнометрии другого АДУ;
- уведомление данным АДУ базовой метки о факте детектирования облучения датчиками облучения блока лазерной дальнометрии; и
- прием от БМ координат облученного датчика данного АДУ в локальной системе координат БМ.
3. Способ определения локальных координат по п. 1, отличающийся тем, что блок инерциальной навигации модуля определения координат АДУ включает датчики измерения углов тангажа, крена и рыскания, а этап в) выполняют, кроме того, с учетом текущих показателей датчиков измерения углов тангажа, крена и рысканья, а также с учетом известного положения облученного датчика относительно геометрического центра АДУ.
4. Способ определения локальных координат по п. 1, отличающийся тем, что этап в2) осуществляют при выполнении по меньшей мере одного из условий, выбираемых из группы:
- превышен предварительно определенный период времени ожидания облучения какого-либо из датчиков облучения блока лазерной дальнометрии модуля определения локальных координат АДУ;
- превышено предварительно определенное расстояние, определенное только средствами блока инерциальной навигации модуля определения локальных координат АДУ.
5. Способ определения локальных координат по п. 4, отличающийся тем, что этап в2) включает этапы:
- остановку АДУ и его переход в режим дезориентации;
- запрос дезориентированным АДУ на облучение его датчиков средствами блока лазерной дальнометрии стороннего АДУ;
- выбор управляющей станцией ближайшего к дезориентированному АДУ стороннего АДУ такого, что сторонний АДУ находится в зоне прямой видимости дезориентированного АДУ и в зоне прямой видимости базовой метки.
6. Система определения локальных координат автоматизированного движущегося устройства в составе системы сбора данных, характеризующих ограниченное пространство произвольной геометрии и размещенные в нем объекты, имеющей в своем составе управляющую станцию, не менее двух автономных движущихся устройств (АДУ) и стартовую площадку, предназначенная для осуществления способа по любому из пп. 1-5, отличающаяся тем, что управляющая станция включает модуль определения локальных координат, который включает по меньшей мере одну базовую метку (БМ) отсчета локальных координат, содержащую модуль лазерной дальнометрии БМ и модуль беспроводной связи БИ, а каждое АДУ включает модуль жизнеобеспечения, модуль сбора данных, модуль фото- и/или видеофиксации, модуль предотвращения столкновений и модуль определения локальных координат АДУ.
7. Система определения локальных координат по п. 6, отличающаяся тем, что модуль определения локальных координат АДУ включает блок инерциальной навигации и блок лазерной дальнометрии,
причем блок инерциальной навигации включает датчики инерциальной системы позиционирования, датчики измерения углов тангажа, крена и рыскания,
а блок лазерной дальнометрии включает гиростабилизированный лазерный сканер, жестко координированный относительно геометрического центра АДУ,
и датчики облучения, выполненные в виде точечных приемников лазерного излучения, расположенных и жестко закрепленных на поверхности конструкции АДУ таким образом, что положение каждого из датчиков относительно геометрического центра точно известно.
8. Система определения локальных координат по п. 6, отличающаяся тем, модуль лазерной дальнометрии БМ выполнен по существу в виде лазерного сканера.
| US 20150321758 A1, 12.11.2015 | |||
| US 8511606 B1, 20.08.2013 | |||
| US 20100228406 A1, 09.09.2010 | |||
| US 20160378109 A1, 29.12.2016 | |||
| УНИВЕРСАЛЬНЫЙ СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА С ПОМОЩЬЮ ОПТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2638876C1 |

