Изобретение относится к устройствам, предназначенным для обезвешивания горизонтально перемещающихся механических систем (МС), преимущественно МС космических аппаратов, в процессе проверки их функционирования при стендовых (лабораторных) испытаниях и может быть использовано в ракетно-космической технике при проведении наземной экспериментальной отработки МС.
Как известно, в практике наземной отработки МС для подтверждения их функционирования (работоспособности) применяются различные механические устройства и стенды, позволяющие обезвесить (компенсировать силу тяжести) перемещаемую (раскрываемую) часть трансформируемой МС для имитации условий невесомости космического пространства.
Известно устройство обезвешивания МС (типа каркасов солнечных батарей) в горизонтальной плоскости с помощью роликов, описанное в книге «Технология сборки и испытаний космических аппаратов» под общей редакцией И.Т.Белякова, И.А.Зернова, М., «Машиностроение», 1990 г., стр.144, рис.7.8. Недостатком данного устройства является неустойчивое (нестабильное) положение элементов МС в процессе функционирования из-за того, что центр масс раскрываемых элементов находится выше опорных роликов, что может привести к боковым возмущениям и нагрузкам на элементы МС. Другим недостатком является необходимость выполнения точной плоскости раскатки с минимальной шероховатостью для уменьшения трения качения роликов.
В результате анализа научно-технической и патентной литературы в качестве прототипа заявленного устройства обезвешивания МС принято устройство стенда, представленное в книге К.С.Колесников, В.И.Козлов, В.В.Кокушкин. «Динамика разделения ступеней летательных аппаратов». М., «Машиностроение», 1977 г., стр.211, рис.7.1. Данный стенд служит для обезвешивания подвижного тела после его отделения при экспериментальной отработке системы разделения. Стенд состоит из подвижной тележки (опоры), перемещающейся с помощью роликов (катков) по направляющей балке (рельсу), неподвижно закрепленной на опорных стойках (или стенах) помещения. Отделяемое тело связано через узлы подвеса, размещенные на отделяемом объекте, тросовую (упругую) подвеску и крюк (жестко закрепленный на тележке) с подвижной тележкой.
Недостатками известного устройства обезвешивания являются:
- значительное сопротивление в боковом направлении при движении роликов тележки по рельсовой направляющей;
- невозможность компенсировать силы трения при движении тележки, поэтому исполнительные механизмы МС при использовании данного устройства обезвешивания должны преодолевать силы трения качения роликов по направляющей в процессе страгивания и движения тележки, что может привести к дополнительному нагружению исполнительных механизмов МС;
- сложность обеспечения прямолинейного движения раскрываемой системы на всем протяжении пути, высокие требования к качеству поверхности направляющей балки;
- при значительном пути движения МС (более 10 м и выше) рельсовая направляющая может быть составной (состоящей из нескольких частей), при этом сложно обеспечить плавность хода МС в процессе раскрытия на стыках этих частей;
- громоздкость (металлоемкость) и большая масса устройства с балочной (рельсовой) направляющей, стационарно закрепленной на опорных стойках или стенах помещения, нерациональность применения такой направляющей для проверки функционирования МС, масса которых не превышает 25 кг.
Целями (задачами) предлагаемого устройства стенда для обезвешивания горизонтально раскрываемой МС являются:
- обеспечение более точных условий имитации невесомости при функционировании МС за счет более корректного обезвешивания МС;
- уменьшение нагрузок на исполнительные устройства МС при их раскрытии за счет компенсации сил трения, препятствующих раскрытию МС, при движении опоры обезвешивания по направляющему элементу;
- уменьшение массы устройства обезвешивания.
Для достижения поставленных целей (задач) в известном устройстве стенда обезвешивания направляющий элемент выполнен в виде троса, натянутого между опорными стойками и закрепленного на них с возможностью регулировки своего углового (наклонного) положения в вертикальной плоскости по отношению к горизонтали (горизонтальной линии). Для этого на опорных стойках выполнены вертикальные пазы, а упругий (пружинный) подвес закреплен на подвижной опоре посредством шарнирного узла.
Выполнение направляющего элемента в виде натянутого троса позволяет регулировать и настраивать систему в зависимости от массы перемещаемой МС. Для более тяжелых масс сила натяжения троса увеличивается. Регулировка натяжения направляющего троса проводится, например, с помощью тандера (винтовой регулируемой стяжки), закрепленной на одной из опорных стоек, между которыми натянут трос.
Кроме того, с помощью регулировки наклона троса легко компенсировать силу трения между роликами опоры и тросом для уменьшения нагрузок на исполнительные элементы МС. Для этого на опорных стойках выполнены вертикальные пазы, в пределах которых трос можно перемещать в вертикальной плоскости, обеспечивая его наклон по отношению к горизонтали (для устранения влияния сил трения). Как известно из курса физики, при движении тела по наклонной поверхности скатывающая сила равна силе трения или тангенс угла наклона (а при малых углах угол наклона) равен коэффициенту трения. Поэтому теоретически угол наклона троса определяется величиной коэффициента трения ролика опоры по тросу. Но, учитывая нестабильность характеристик трения и их зависимость от состояния контактирующих поверхностей, на практике угол наклона троса (соответственно скатывающую силу и силу трения) необходимо определять экспериментально для конкретных условий испытаний и конкретного оборудования. Предварительно перед началом испытаний МС изменением угла наклона троса добиваются свободного движения груз-макета, масса которого равна массе перемещаемой части МС, вдоль троса (в любой точке троса по его длине) без приложения усилий и задействования каких-либо приводов. Выбранный таким образом угол наклона направляющего троса устанавливается путем перемещения одного из концов троса в вертикальном пазу, выполненном в одной из опорных стоек, между которыми натянут направляющий трос. За счет натяжения троса под наклоном между опорными стойками осуществляется компенсация сил трения и уменьшение нагрузок на приводы и исполнительные механизмы в процессе раскрытия МС.
Поверхность ролика подвижной опоры, контактирующая с направляющим тросом, выполнена в виде канавки (желоба), диаметр которого больше диаметра троса. Поэтому в предлагаемом устройстве отсутствует сила сопротивления, присущая устройству-прототипу и обусловленная трением боковой поверхности роликов подвижной тележки о рельсовую балочную направляющую.
Т.к. как направляющий трос в вертикальной плоскости наклонен по отношению к горизонтали, а движение раскрываемой МС происходит строго горизонтально, то для исключения возможного «защемления» («закусывания») упругого (пружинного) подвеса (отклонения пружинного подвеса от вертикали) его крепление на подвижной опоре (для обеспечения ее движении по наклонному тросу) выполнено с помощью шарнирного узла. За счет шарнирного крепления на подвижной опоре пружинный подвес на всем пути в процессе раскрытия МС занимает вертикальное положение, обеспечивая ее нормальное функционирование.
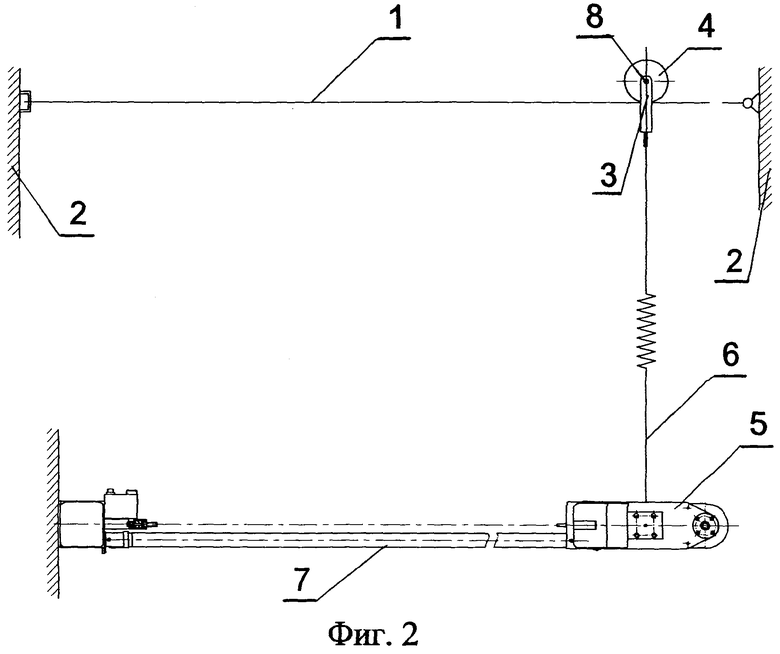
На фигуре 1 изображен стенд обезвешивания для проверки функционирования горизонтально раскрывающейся МС (выдвижной гравитационной штанги, выполненной в виде ленточного штыря) в исходном положении (перед началом раскрытия МС).
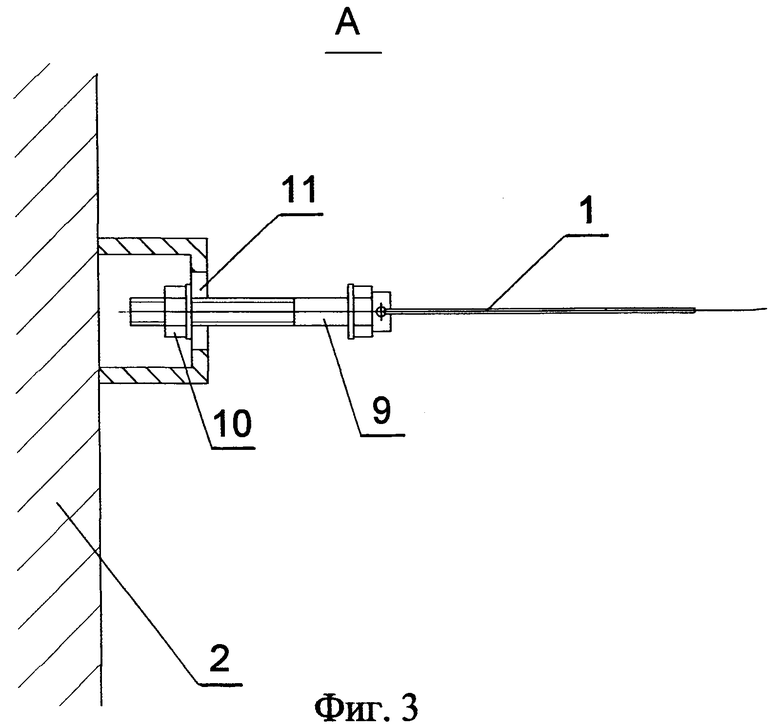
На фигуре 2 изображен стенд обезвешивания для проверки функционирования горизонтально раскрывающейся МС в конечном положении (после раскрытия МС).
На фигуре 3 показано крепление направляющего троса на опорной стойке стенда (выносной элемент А на фигуре 1).
Стенд для обезвешивания МС состоит из троса 1, натянутого между опорными стойками 2. На трос 1 установлена подвижная (перемещаемая) опора 3 с помощью ролика 4. Обезвешивание перемещаемой массы 5 МС осуществляется через пружинный подвес 6, один конец которого закреплен на массе 5, выдвигаемой на ленточном штыре 7 МС (см. фигуру 2), а другой конец - на подвижной опоре 3 через шарнирный узел 8. Натяжение троса 1 между опорными стойками 2 производится с помощью талрепа (винтовой стяжки), состоящего из болта 9 и гайки 10 (см. фигуру 3), закрепленного на одной из опорных стоек 2. Регулировка углового (наклонного) положения троса 1 в вертикальной плоскости по отношению к горизонтали (горизонтальной линии) осуществляется перемещением одного из концов троса 1 в вертикальных пазах 11 (см. фигуру 3), выполненных на одной из опорных стоек 2. Практически удобно болт 9 с гайкой 10 талрепа и вертикальные пазы 11 выполнять на одной и той же стойке 2 для одновременного натяжения и регулировки наклона троса 1.
Проверка функционирования МС (процесс раскрытия МС) с помощью предложенного стенда осуществляется следующим образом.
При расфиксации элементов, удерживающих МС, начинается прямолинейное движение ленточного штыря 7 с концевой массой 5 МС. Одновременно с движением МС начинается и движение опоры 3 на ролике 4 по натянутому тросу 1. При этом масса 5 МС на всем пути своего движения находится в обезвешенном состоянии за счет крепления через пружинный (упругий) подвес 6 к подвижной опоре 3. За счет наклона троса 1, натянутого между опорными стойками 2, силы трения качения между роликом 4 опоры 3 и тросом 1 не препятствуют движению и не нагружают привод раскрытия МС (в данном конкретном примере ленточный штырь 7).
Предложенное устройство стенда позволяет обезвесить перемещаемую массу МС на всем протяжении пути ее прямолинейного движения с минимальной нагрузкой на привод (исполнительные устройства) раскрытия МС. Предложенный стенд для обезвешивания МС КА с натянутым тросом в качестве направляющего элемента обладает малой массой, при необходимости легко настраивается и регулируется для проведения отработки МС с различной массой и длиной перемещаемых (выдвигаемых) частей МС. В предложенном устройстве в качестве опорных стоек можно использовать стены помещений.
Применение устройства при стендовых испытаниях для проверок функционирования ряда МС, типа гравитационных штанг с ленточными штырями длиной до 10 м, показали значительную эффективность предложенного технического решения для обезвешивания длинномерных трансформируемых МС.
Заявленное устройство обезвешивания МС по сравнению с прототипом обладает существенными отличиями и позволяет обезвесить перемещаемую МС на всем протяжении пути ее движения с минимальными нагрузками на привод раскрытия при проверках функционирования МС.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАЗВЕРТЫВАЕМЫЙ КРУПНОГАБАРИТНЫЙ КОСМИЧЕСКИЙ РЕФЛЕКТОР И СПОСОБ ЕГО НАЗЕМНОЙ ОТРАБОТКИ | 2010 |
|
RU2442249C1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ВЕРТИКАЛЬНО ПЕРЕМЕШАЮЩЕЙСЯ МАЛОЖЕСТКОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА | 2004 |
|
RU2273592C2 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ГОРИЗОНТАЛЬНО ПЕРЕМЕЩАЮЩЕЙСЯ МНОГОЗВЕННОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ КОСМИЧЕСКОГО АППАРАТА | 2008 |
|
RU2376217C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ (АСТРОНАВТОВ) К ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ (ВАРИАНТЫ) | 2013 |
|
RU2524503C1 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ЭЛЕМЕНТОВ КОСМИЧЕСКИХ АППАРАТОВ ПРИ НАЗЕМНЫХ ИСПЫТАНИЯХ | 2020 |
|
RU2744925C1 |
| ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩИЙ СТЕНД ДЛЯ СОЗДАНИЯ УСЛОВИЙ ИНТЕРАКТИВНОГО БЕЗОПОРНОГО ПРОСТРАНСТВА И ПОНИЖЕННОЙ ГРАВИТАЦИИ | 2012 |
|
RU2518478C2 |
| ПОВОРОТНОЕ УСТРОЙСТВО С ТРОСОБЛОЧНОЙ СИСТЕМОЙ ДЛЯ ОБЕЗВЕШИВАНИЯ РАСКРЫВАЕМЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2721448C1 |
| СИСТЕМА ИМИТАЦИИ НЕВЕСОМОСТИ | 2014 |
|
RU2565807C2 |
| УСТРОЙСТВО ДЛЯ ОБЕЗВЕШИВАНИЯ ПРЕЦИЗИОННЫХ РАСКРЫВАЕМЫХ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2019 |
|
RU2733012C1 |
| ТРАВЕРСА | 2017 |
|
RU2661671C1 |
Заявленное изобретение относится к испытательной технике и может быть использовано для проведения испытаний горизонтально перемещающихся механических систем (МС), в том числе космических аппаратов (КА), в процессе проверки их функционирования при проведении наземной отработки конструкций. Стенд для обезвешивания МС состоит из троса, натянутого между опорными стойками. На трос установлена подвижная опора с помощью ролика. Обезвешивание перемещаемой массы МС осуществляется через пружинный подвес, один конец которого закреплен на выдвигаемой массе МС, а другой конец - на подвижной опоре через шарнирный узел. Натяжение троса между опорными стойками производится с помощью талрепа, закрепленного на одной из опорных стоек. Регулировка углового положения троса в вертикальной плоскости по отношению к горизонтали осуществляется перемещением одного из концов троса в вертикальных пазах, выполненных на одной из опорных стоек. Технический результат - уменьшение нагрузок на исполнительные устройства при проверках функционирования МС. 3 ил.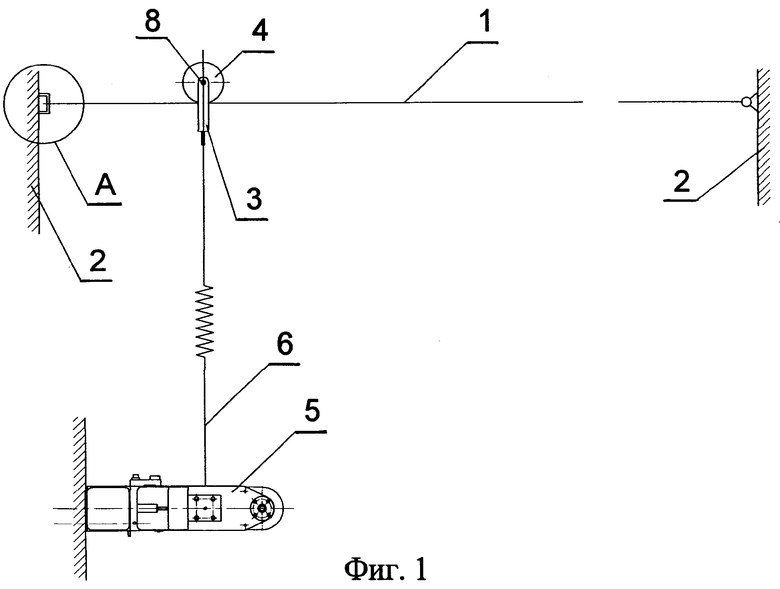
Стенд для обезвешивания горизонтально перемещающейся механической системы космического аппарата, состоящий из закрепленного на опорных стойках направляющего элемента, на который установлена с возможностью перемещения вдоль направляющего элемента посредством роликов подвижная опора, соединенная через упругий подвес с перемещающейся механической системой, отличающийся тем, что направляющий элемент выполнен в виде троса, натянутого между опорными стойками и закрепленного на них с возможностью регулировки своего углового положения в вертикальной плоскости по отношению к горизонтали, при этом на опорных стойках выполнены вертикальные пазы, а упругий подвес закреплен на подвижной опоре посредством шарнирного узла.
| КОЛЕСНИКОВ К.С | |||
| и др | |||
| ДИНАМИКА РАЗДЕЛЕНИЯ СТУПЕНЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | |||
| - М.: Машиностроение, 1977 | |||
| Стенд для моделирования невесомости двухзвенных механизмов | 1983 |
|
SU1089452A1 |
| Исполнительный механизм имитатора пониженной гравитации | 1989 |
|
SU1722946A1 |
| US 3281964 A, 01.11.1966 | |||
| US 5110294 A, 05.05.1992. | |||

