ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Это изобретение относится к матрицам устройств актюации, в которых используется активный материал. Оно также относится к способам действия таких матриц.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В WO 98/11586 A1 раскрывается переключающее устройство, содержащее мембрану, выполненную из материала М1, поддерживаемого подложкой, выполненной из материала М2, причем материал M1 удерживается по отношению к материалу M2 на границе раздела мембрана/подложка, так чтобы изогнуть упомянутую мембрану. С помощью пьезоэлектрических средств управления мембрана может переключаться между стабильной вогнутой конфигурацией и стабильной выпуклой конфигурацией. Переключающее устройство полезно для устройств отображения.
Электро- или оптоактивные материалы представляют собой материалы, у которых обнаруживается механическая деформация при электрическом или оптическом возбуждении подходящим сигналом управления. Кроме того, у некоторых классов этих материалов наблюдается обратный эффект, то есть они могут создавать электрический или оптический сигнал при механическом деформировании. Точный механизм возникновения упомянутых выше эффектов зависит от выбранного материала и в некоторых случаях также от способа включения его в устройство. Вследствие наличия упомянутых выше эффектов такие материалы чаще всего применяют в актюаторах и/или датчиках.
Электроактивные полимеры (ЭАП) и оптоактивные полимеры (ОАП) относятся к перспективным классам материалов. В них положительные характеристики актюации и отклика сочетаются с рядом полезных технических характеристик, что позволяет использовать их в новых прикладных областях. Так, например, актюаторы на основе ЭАП обычно проявляют относительно большую деформацию и усилие при небольшом объеме или малом коэффициенте формы по сравнению с распространенными другими механическими актюаторами или актюаторами на основе неорганических электроактивных материалов (ЭАМ). Кроме того, ЭАП выдают бесшумную работу, точное электронное управление, быстрый отклик и возможность высокого разрешения и циклической актюации в широком диапазоне возможных частот актюации, таком как 0-20 кГц. ОАП обеспечивают другие преимущества. И все эти свойства и преимущества сопровождаются легким изготовлением в различных формах при использовании хорошо отработанных способов, что позволяет легкую интеграцию в большое множество систем.
ЭАП и ОАП особенно выгодно использовать в любой области применения, в которой требуется небольшая величина перемещения компонента или детали. Аналогично этому, технологию можно использовать для восприятия небольших перемещений.
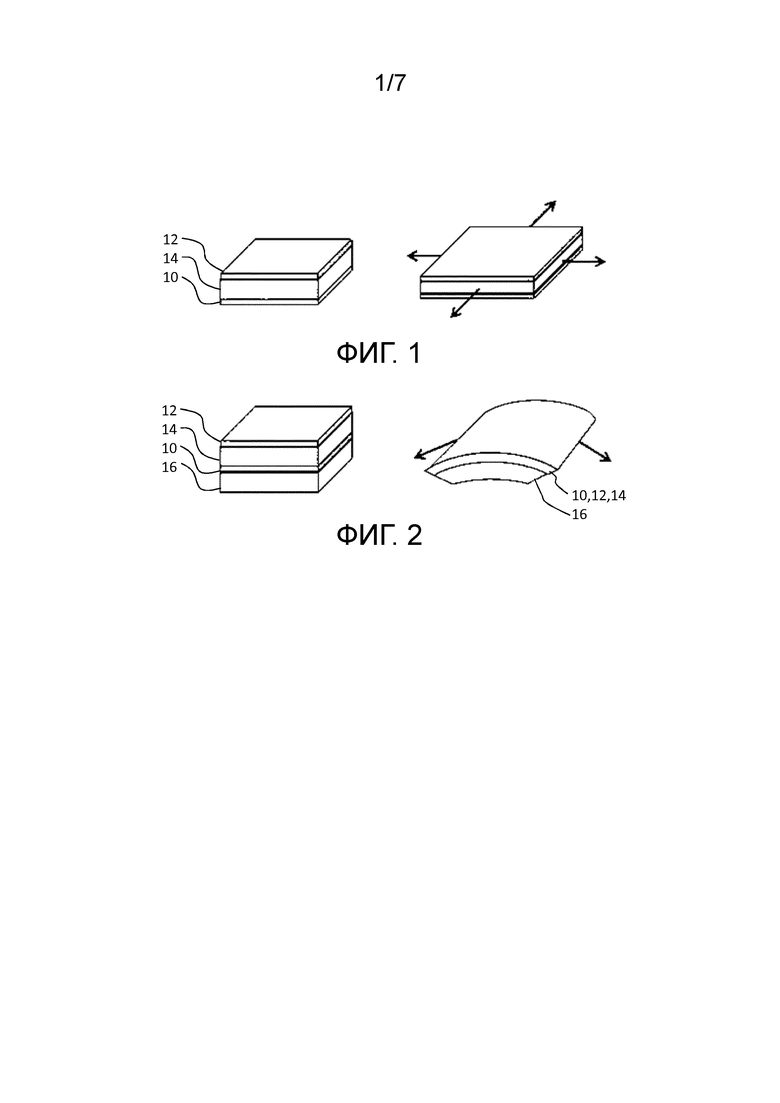
В качестве примера работы ЭАП-устройства на фиг. 1 и 2 показаны два возможных режима работы ЭАП-устройства. Устройство содержит слой 14 ЭАП, заключенный между электродами 10, 12 на противоположных сторонах слоя 14 ЭАП. В то время как на фиг. 1 слой ЭАП является неограниченно подвижным, на фиг. 2 весь слой ЭАП и его электроды закреплены одной стороной слоя к опорному слою 16 носителя. Разность напряжений (сигнал возбуждения), подаваемых на электроды 10 и 12, используется для создания электрического поля по слою ЭАП, которое вызывает расширение слоя ЭАП по всем показанным направлениям. В то время как на фиг. 1 это приводит к деформированию слоя ЭАП вследствие того, что слой свободно подвешен, та же самая актюация на фиг. 2 приводит к изгибу устройства вследствие ограниченной свободы перемещения благодаря закреплению. Путем технической проработки устройств может быть вызвано огромное разнообразие откликов устройства при актюации слоя ЭАП, то есть при приведении устройства в действие. Таким образом, для получения показанного асимметричного изгиба вокруг оси можно использовать, например, ориентацию молекул (растяжение пленки) для принудительного перемещения в одном направлении. Расширение в одном направлении может быть следствием асимметрии слоя ЭАП или оно может быть следствием асимметрии свойств слоя носителя или сочетания обеих.
Устройство на основе ЭАП или ОАП, подобное устройству с фиг. 1 и 2, обычно является аналоговым устройством, и это означает, что кривая возбуждения в зависимости от выходного отклика представляет собой непрерывную кривую. Следовательно, любой сигнал отличный от сигнала нулевого уровня/интенсивности будет приводить к выходу актюации. Однако для поддержания состояния актюации требуется непрерывное возбуждение. В некоторых случаях нежелательно подводить непрерывный сигнал возбуждения к актюатору. Поэтому имеется необходимость в устройстве, для которого не требуется непрерывное приложение сигнала возбуждения для сохранения его в состоянии актюации.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача изобретения заключается в обеспечении матриц устройств актюации типа описанного в этой заявке выше, для которого не требуется непрерывное приложение сигнала возбуждения для сохранения его в состоянии актюации.
Изобретение предусматривает систему и способ, определенные в независимых пунктах формулы изобретения. В зависимых пунктах формулы изобретения представлены преимущественные варианты осуществления.
Изобретение использует устройство актюации, содержащее:
- структуру актюации, содержащую носитель и активный материал, прикрепленный к носителю, для вызывания изгиба и/или изменения изгиба по меньшей мере носителя в ответ на возбуждение активного материала;
- механическую структуру для задания по меньшей мере первого стабильного механического состояния и второго стабильного механического состояния, отличающегося от первого стабильного механического состояния структуры актюации, путем механического удерживания структуры актюации в изогнутой конфигурации в по меньшей мере одном из первого и второго стабильных механических состояний, и
- причем при возбуждении структура актюации может переключаться из первого стабильного механического состояния во второе стабильное механическое состояние.
Активный материал представляет собой материал, который может деформироваться или изменять его форму при возбуждении. Под возбуждением может подразумеваться, например, электрическое возбуждение (напряжением, полем или током) или оптическое возбуждение (оптическим сигналом некоторой частоты, цвета и/или интенсивности).
Структура актюации включает в себя носитель, прикрепленный к активному материалу так, что структура актюации обеспечивает изгибный актюатор. Поэтому возбуждение делает его изогнутым или менее изогнутым.
Механическая структура ограничивает актюатор механически, так что актюатор может принимать по меньшей мере два различных стабильных механических состояния.
Стабильное механическое состояние означает механическое состояние, которое может иметь место или поддерживаться без приложения внешнего стимула, в частности, возбуждения устройства актюации. Таким образом, механическая структура предназначена для поддержания по меньшей мере одного стабильного механического состояния после прекращения возбуждения. Структура актюации взаимодействует с механической структурой для инициирования переключения устройства актюации из одного состояния в другое состояние. Это означает, что для устройства актюации требуется возбуждение только при переключении, а не при нахождении в стабильном состоянии.
Первое стабильное механическое состояние может быть состоянием равновесия без возбуждения или состоянием покоя структуры актюации.
В этом устройстве актюации структура актюации сочетается с механической структурой, так что устройство актюации может быть приведено в действие и может иметь многочисленные стабильные состояния. Несущая часть структуры актюации является частью механической структуры, что делает устройство актюации особенно компактным. Эта конструкция делает возможными простые плоские изгибные актюаторы (многослойные с по меньшей мере одним слоем материала актюатора и по меньшей мере одним слоем носителя), которые сами по себе не обеспечивают бистабильный режим и которые обычно изготавливаются в плоском состоянии для включения в устройство актюации, которое действительно имеет бистабильный режим актюации.
Поэтому устройство актюации можно использовать для получения цифрового выхода (ниже порога действие отсутствует, а выше порога имеет место действие постоянной величины) или же многоуровневого цифрового выхода. Следовательно, актюация по существу аналоговой структуры актюатора трансформируется в цифровой выход. Таким образом, аналоговый сигнал возбуждения преобразуется в цифровой выход актюации, и возбужденное состояние остается после снятия приложенного сигнала возбуждения.
Предпочтительно, чтобы устройство актюации обеспечивало выход актюации, где выход актюации основан на по меньшей мере втором стабильном механическом состоянии или определяется им. Выход актюации может представлять собой любой вид механического выхода, такой как, например, удар, усилие, деформация, давление или смещение, при этом смещение может быть основано на скольжении, повороте, изгибе, кручении или расширении в одном или более направлениям вдоль одной или более осей, на одной или более точках или вокруг одной или более осей или при любом сочетании вышеупомянутых. Это можно осуществлять в соответствии с потребностью в конкретной конструкции структуры актюации и/или механической структуры.
Структура актюации может быть предусмотрена для получения выхода актюации. В ином случае или дополнительно может иметься выходной элемент актюации (например, поршень, или стержень, или другой элемент), находящийся в механическом взаимодействии (в контакте или с помощью действующих усилий) со структурой актюации и/или механической структурой, для получения выхода актюации.
В одном примере устройство актюации возвращается в исходное положение приложением к устройству актюации внешней механической силы. Тогда приведение в действие приводит к переключению между состояниями только в одном направлении, то есть из первого стабильного состояния во второе стабильное состояние.
Устройство актюации, используемое в изобретении, может дополнительно включать в себя то, что
- носитель имеет первую сторону и вторую сторону, противоположную первой стороне, при этом активный материал прикреплен к первой стороне; и
- структура актюатора содержит дополнительный активный материал, прикрепленный к второй стороне, причем дополнительный активный материал вызывает изгиб и/или изменение изгиба структуры актюации в ответ на дополнительное возбуждение активного материала, так что при дополнительном возбуждении структура актюации может переключиться из второго стабильного механического состояния в первое стабильное механическое состояние.
Таким образом, после прекращения дополнительного возбуждения механическая структура может сохранять первое стабильное механическое состояние. Поэтому этим устройством актюации можно управлять между двумя стабильными состояниями и в то же время получить компактную конструкцию.
Активный материал и дополнительный активный материал могут быть одинаковыми или различными. Оба могут быть электроактивными материалами или оба могут быть оптоактивными материалами. В ином случае один может быть электроактивным, а другой оптоактивным.
Предпочтительно, чтобы подложка и любые активные материалы были расположены в виде пакета слоев. Активный материал, дополнительный активный материал, несущая часть механической структуры и необязательные другие части могут быть выполнены в виде слоев, расположенных один на другом. Необязательные части могут быть частями, предназначенными для обеспечения возбуждения, такими как один или более электродов (в случае электроактивного материала) или один или более оптических волноводов/световодов (в случае оптоактивного материала). Такая конструкция является удобной.
Актюатор как в первом, так и во втором механическом состоянии может механически удерживаться в изогнутой конфигурации. В таком случае удерживаемый механически актюатор и особенно носитель могут быть бистабильной частью (ведущей себя как, например, пружина) вследствие удерживания. Эта часть может иметь форму слоя. Например, эта часть или слой моментально переходит между двумя стабильными состояниями во время переключения. Например, эта часть может переходить между выпуклым и вогнутым состояниями или, что то же самое, между состояниями выступа вверх и выступа вниз. Поэтому изогнутая конфигурация в первом стабильном механическом состоянии может быть противоположна изогнутой конфигурации во втором стабильном механическом состоянии.
В ином случае структура актюации может быть практически плоской в ситуации отсутствия возбуждения, при нахождении в механически не ограниченном первом или втором стабильном механическом состоянии, тогда как другое состояние все же представляет изогнутую конфигурацию.
Устройство актюации может содержать корпус, при этом механическая структура образует крышку для корпуса, а структура актюации находится внутри корпуса. В результате получается закрытая законченная конструкция, в которой верхняя крышка обеспечивает механический выход актюации устройства актюации.
Эта компактная конструкция является предпочтительной для устройства актюации, имеющего дополнительную структуру актюации, и даже в случае многочисленных структур (которые могут быть в виде слоев) может быть образовано компактное устройство с возможностью двунаправленного переключения и с высокой стабильностью.
Активный материал и/или дополнительный активный материал может простираться только по участку площади носителя, например краевого участка. Материала должно достаточно, чтобы вызвать переключение структуры актюации между ее состояниями.
Механическая структура может содержать удерживающее устройство, которое имеет множество положений удерживания, в которых структура актюации может удерживаться в стабильном механическом состоянии, при этом каждое положение удерживания соответствует отличающемуся положению актюатора в по меньшей мере одном из положений удерживания, механически удерживающем структуру актюации в изогнутой конфигурации в по меньшей мере одном из первого и второго стабильных механических состояний.
Благодаря удерживанию структуры актюации после возбуждения ее форма сохраняется по меньшей мере частично после окончания возбуждения. Удерживающее устройство может быть предназначено, например, для удерживания подвижного края структуры актюации на различных расстояниях от фиксированного края структуры актюации и может содержать множество удерживающих выемок.
Устройства актюации с использованием электроактивных полимеров в качестве электроактивных материалов могут быть подразделены на возбуждаемые полем и возбуждаемые ионами материалы. Возбуждаемые полем ЭАП активируются электрическим полем с помощью непосредственной электромеханической связи. Они обычно требуют сильных полей (вольты на метр), но небольших токов. Для поддержания напряжения возбуждения слои полимера обычно делают как можно более тонкими. Ионные ЭАП активизируют с помощью электрически наведенного переноса ионов и/или растворителя. Для этого обычно требуются низкие напряжения, но большие токи. Они требуют жидкой/гелеобразной электролитной среды (хотя некоторые системы материалов также могут работать при использовании твердых электролитов). Оба класса ЭАП имеют многочисленные семейства, каждое из которых имеет свои преимущества и недостатки.
Примеры возбуждаемых полем ЭАП включают в себя пьезоэлектрические полимеры, электрострикционные полимеры (такие как релаксорные полимеры на основе поливинилиденфторида или полиуретаны) и диэлектрические эластомеры. Другие примеры включают в себя электрострикционные привитые полимеры, электрострикционную бумагу, электреты, электровязкоупругие эластомеры и жидкокристаллические эластомеры.
Примерами возбуждаемых ионами ЭАП являются сопряженные/проводящие полимеры, ионные полимер-металлические композиты (IPMC) и углеродные нанотрубки (УНТ). Другие примеры включают в себя ионные полимерные гели.
Оптоактивные материалы могут содержать полимеры, имеющие одну или более двойных связей, которые могут подвергаться цис-транс-изомеризации во время облучения. Такие связи могут быть связями С=С, N=C или N=N. Такие материалы могут включать в себя, например, стильбены.
При некоторых применениях может использоваться матрица актюаторов, например, в системах позиционирования и системах регулирования топологии поверхностей. Однако, когда напряжения возбуждения актюаторов довольно высокие (выше 50 В), быстро становится затратным индивидуальное возбуждение каждого актюатора его собственной интегральной схемой возбудителя.
Пассивная матричная решетка является простой реализацией матричной системы возбуждения с использованием только соединений строки (n строк) и столбца (m столбцов) и имеет небольшие стоимость и сложность в отличие от вариантов активной матрицы. Поскольку только (n+m) возбудителей требуются для адресации к (n×m) актюаторам, такой подход является намного более эффективным и, кроме того, экономятся расходы и пространство для дополнительных монтажных соединений.
В идеальном случае в пассивном матричном устройстве каждый отдельный актюатор должен возбуждаться до его максимального напряжения без влияния на соседние актюаторы. Однако в традиционных ЭАП устройствах (без какого-либо порога напряжения) будет иметь место некоторое переходное влияние на соседние актюаторы. Когда напряжение прикладывается для приведения в действие одного актюатора, соседние актюаторы также подвергаются воздействию напряжения и частично будут приводиться в действие, что является нежелательным эффектом при многих применениях.
Эта ситуация описывается в патенте США № 8552846, в котором рассматривается пассивное матричное возбуждение ЭАП устройств без какого-либо порогового напряжения или бистабильности. В нем раскрывается принцип пассивной матрицы для двухуровневой схемы возбуждения. Он обеспечивает наилучший коэффициент 3:1 различия напряжений возбуждения (то есть, на не приведенных в действие актюаторах обнаруживается напряжение, составляющее 33% от максимального напряжения актюации), так что истинный бистабильный режим не обеспечивается. Следует отметить, что коэффициент 3:1 различия эквивалентен отношению 9:1 уровней давления (поскольку уровень давления пропорционален квадрату напряжения). Однако эта система работает только при двухуровневом возбуждении. Третий уровень возбуждения вызывает изменение уровня актюации не приведенных в действие устройств на основе электроактивного полимера.
Следовательно, имеются ограничения, в частности, в использовании ЭАП устройств и, в общем случае, устройств актюации в адресуемых матрицах, в частности, в пассивных матричных решетках.
Согласно изобретению предложена система, содержащая множество устройств актюации, определенных выше. Предпочтительно, чтобы упомянутое множество устройств актюации было расположено в столбцах и строках матрицы. В этой системе или матрице устройств актюации используются многостабильные устройства. Таким образом, обеспечивается функция памяти, так что любая заданная схема адресации матрицы может быть записана и сохранена для упомянутого множества устройств актюации или матрицы устройств актюации.
Каждое из упомянутого множества устройств актюации может быть соединено с по меньшей мере одной сигнальной линией для подачи сигналов возбуждения на устройство актюации. Для устройств с оптической актюацией или оптическим возбуждением такие сигнальные линии могут быть световодами. Для устройств с электрическим возбуждением такие сигнальные линии могут быть электродами. Предпочтительно, чтобы каждое устройство актюации было соединено с первой и второй сигнальными линиями, где одна предназначена для подачи сигнала возбуждения и другая предназначена для подачи сигналов выбора. Это целесообразно для множества устройств актюации, расположенных в матричной решетке.
Предпочтительно, чтобы эти устройства актюации могли быть соединены с устройством возбуждения по схеме адресации пассивной матрицы. Более конкретно, каждое из упомянутого множества устройств актюации содержит электроактивный материал в качестве активного материала и соединено с первой сигнальной линией и второй сигнальной линией для подачи сигнала возбуждения на устройство актюации; и при этом система дополнительно содержит устройство возбуждения для подачи сигналов с по меньшей мере двумя возможными уровнями в первую сигнальную линию и сигналов с по меньшей мере двумя возможными уровнями во вторую сигнальную линию, при этом сигналы подаются так, что принимаемый устройством актюации сигнал возбуждения представляет собой сочетание сигнала одного уровня из первой сигнальной линии и одного из второй сигнальной линии, при этом только одним из четырех возможных уровней совместных сигналов обеспечивается переключение из первого стабильного состояния во второе стабильное состояние устройства актюации.
Необходимо отметить, что при схеме многоуровневого возбуждения может быть больше четырех уровней совместных сигналов. Однако, может иметь место по меньшей мере четыре таких уровня, что является результатом сочетания сигналов с минимальным и максимальным уровнями из первой сигнальной линии с сигналами с максимальным и минимальным уровнями из второй сигнальной линии.
Для каждого устройства актюации предпочтительно, чтобы:
- сигнал возбуждения имел уровень совместных сигналов ниже первого порога Vbi и обеспечивал актюацию из первого стабильного состояния ко второму стабильному состоянию, но с возвратом в первое стабильное состояние после снятия сигнала возбуждения;
- сигнал возбуждения имел уровень совместных сигналов выше второго порога и обеспечивал актюацию из первого стабильного состояния во второе стабильное состояние без возврата в первое стабильное состояние после снятия сигнала возбуждения, и при этом второй порог имел величину, которая составляет на первый предел Vdr больше, чем величина первого порога Vbi.
Таким образом, имеется диапазон сигналов возбуждения, который является недостаточным, чтобы вызвать переключение отдельного устройства актюации в его стабильное состояние, и другой диапазон, который должен вызвать переключение устройства актюации из одного его стабильного состояния в другое. Это свойство можно использовать для исключения перекрестной связи между устройствами актюации во время последовательного возбуждения, приводящей к потере ранее сохраненного состояния актюации. Это наиболее удобно при адресации множества устройств актюации по типу пассивной матрицы.
В системе устройство возбуждения может быть выполнено с обеспечением уровней сигналов так, что для одной из первой сигнальной линии и второй сигнальной линии два возможных уровня сигналов являются нулем и величиной первого порога Vbi, а для другой из первой сигнальной линии и второй сигнальной линии два возможных уровня сигналов являются нулем и величиной первого предела Vdr, при этом ненулевые уровни сигналов имеют противоположные полярности.
Таким образом, чтобы вызвать изменение состояния актюации достаточно только различия между сигналами с ненулевыми уровнями (которое больше, чем каждый уровень сигнала (и к тому же сигнал возбуждения), поскольку один является положительным и один отрицательным).
Предпочтительно, чтобы величина первого порога Vbi была больше, чем величина первого предела Vdr. Например, величина первого порога Vbi может быть по меньшей мере в пять раз больше величины первого предела Vdr. Чем меньше первый предел Vdr, тем круче бистабильная характеристика устройств актюации, и поэтому необходимы меньшие величины напряжения возбуждения.
В случае матрицы устройств актюации можно приспособить устройства актюации к приему внешнего входного сигнала в виде механического сброса. Он может представлять собой, например, сигнал давления.
В ином случае для каждого устройства актюации:
- сигнал сброса возбуждения, имеющий совместные сигналы с уровнем выше третьего порога Vres, может обеспечивать сброс в первое состояние после снятия сигнала возбуждения.
Этим обеспечивается электрический, а не механический сброс устройств актюации. В таком случае сигналы, имеющиеся в первой и второй сигнальных линиях, совместно применяются при подаче сигнала сброса возбуждения на устройства актюации, либо одновременно, либо построчно, либо по столбцам.
Предпочтительно, чтобы в системе устройство актюации содержало электроактивный полимер в качестве активного материала.
В примерах согласно другому аспекту изобретения представлен способ работы множества устройств актюации согласно изобретению, при этом каждое из упомянутого множества устройств актюации содержит электроактивный материал в качестве активного материала и соединено с первой сигнальной линией и второй сигнальной линией для подачи сигнала возбуждения на устройство актюации;
способ содержит подачу сигналов с по меньшей мере двумя возможными уровнями в первую сигнальную линию и сигналов с по меньшей мере двумя возможными уровнями во вторую сигнальную линию, при этом сигналы подают так, что сигнал возбуждения, принимаемый устройством актюации, является сочетанием сигнала одного уровня из первой сигнальной линии и одного из второй сигнальной линии, при этом только одним из четырех возможных уровней совместных сигналов обеспечивается переключение из первого стабильного состояния во второе стабильное состояние устройства актюации.
Для каждого устройства актюации:
-сигнал возбуждения, имеющий уровень совместных сигналов ниже первого порога Vbi, может обеспечивать актюацию из первого стабильного состояния к второму стабильному состоянию, но с возвратом в первое стабильное состояние после снятия сигнала возбуждения;
- сигнал возбуждения, имеющий уровень совместных сигналов выше второго порога, может обеспечивать актюацию из первого стабильного состояния во второе стабильное состояние без возврата в первое стабильное состояние после снятия сигнала возбуждения, при этом второй порог имеет величину, которая составляет на первый предел Vdr больше, чем величина первого порога Vbi,
- при этом в таком случае способ может содержать:
- подачу сигнала с одним из двух возможных уровней в выбранную одну из первой сигнальной линии и второй сигнальной линии, выбираемых из нуля и из величины первого порога Vbi;
- подачу сигнала с одним из двух возможных уровней в выбранную одну из первой сигнальной линии и второй сигнальной линии, выбираемых из нуля и из величины первого предела Vdr, при этом ненулевые уровни сигналов имеют противоположные полярности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Теперь примеры изобретения будет подробно описаны с обращением к сопровождающим чертежам, на которых:
На Фиг. 1 показано известное устройство на основе электроактивного полимера, которое не закреплено;
На Фиг. 2 показано известное устройстве на основе электроактивного полимера, которое закреплено на носителе или подложке;
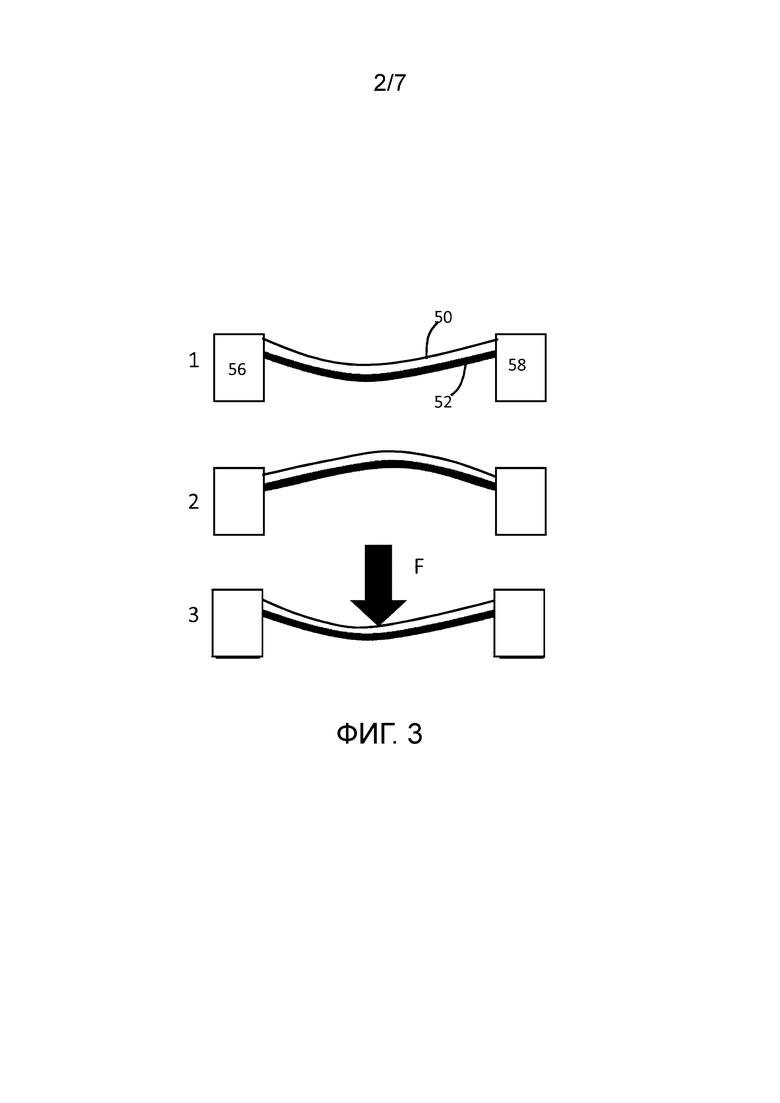
На Фиг. 3 показан первый пример устройства на основе электроактивного полимера;
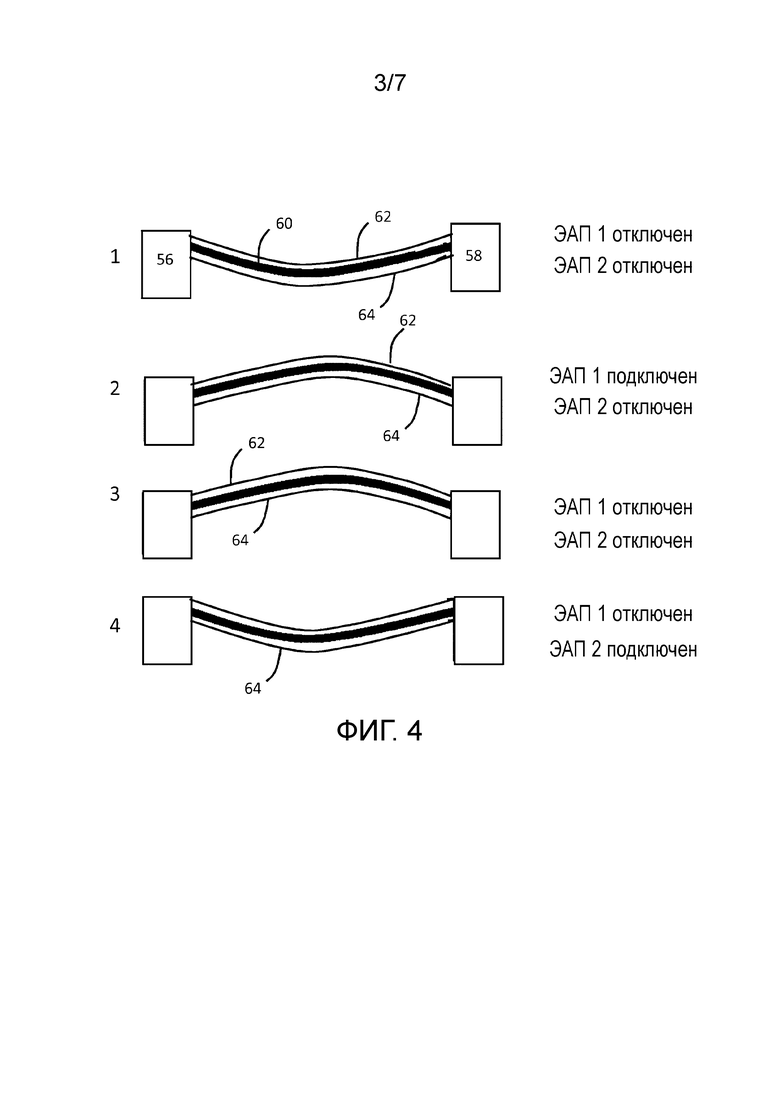
На Фиг. 4 показан второй пример устройства на основе электроактивного полимера;
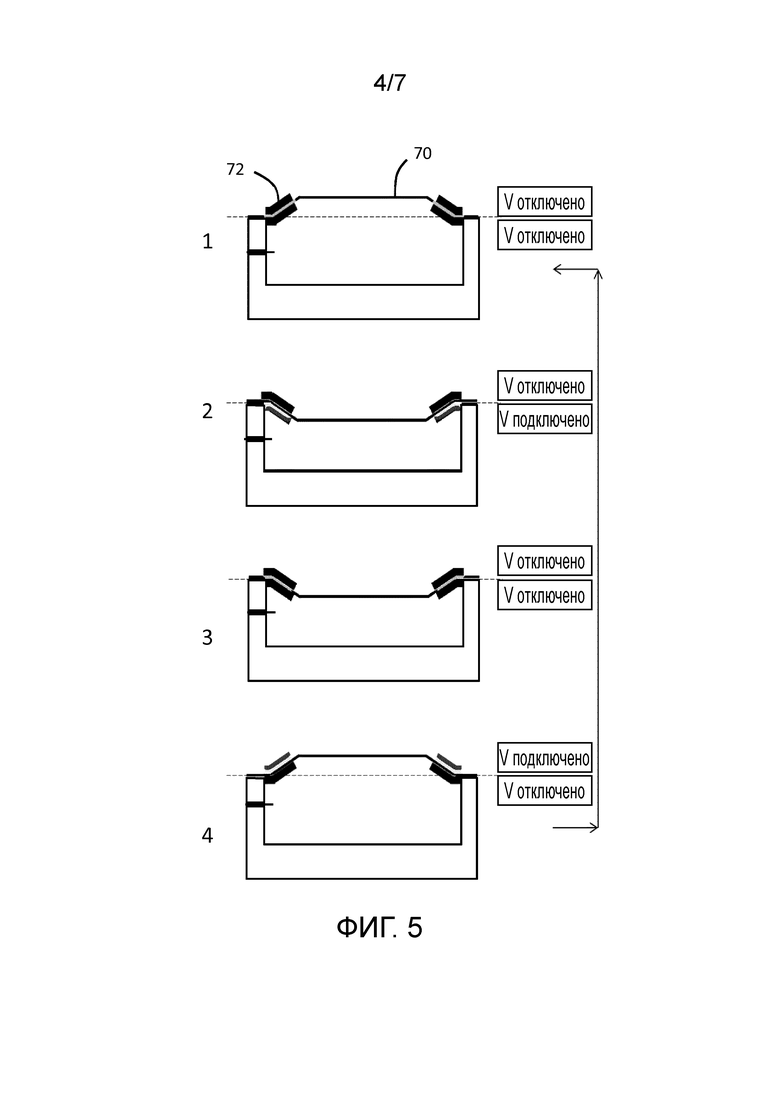
На Фиг. 5 показан третий пример устройства на основе электроактивного полимера;
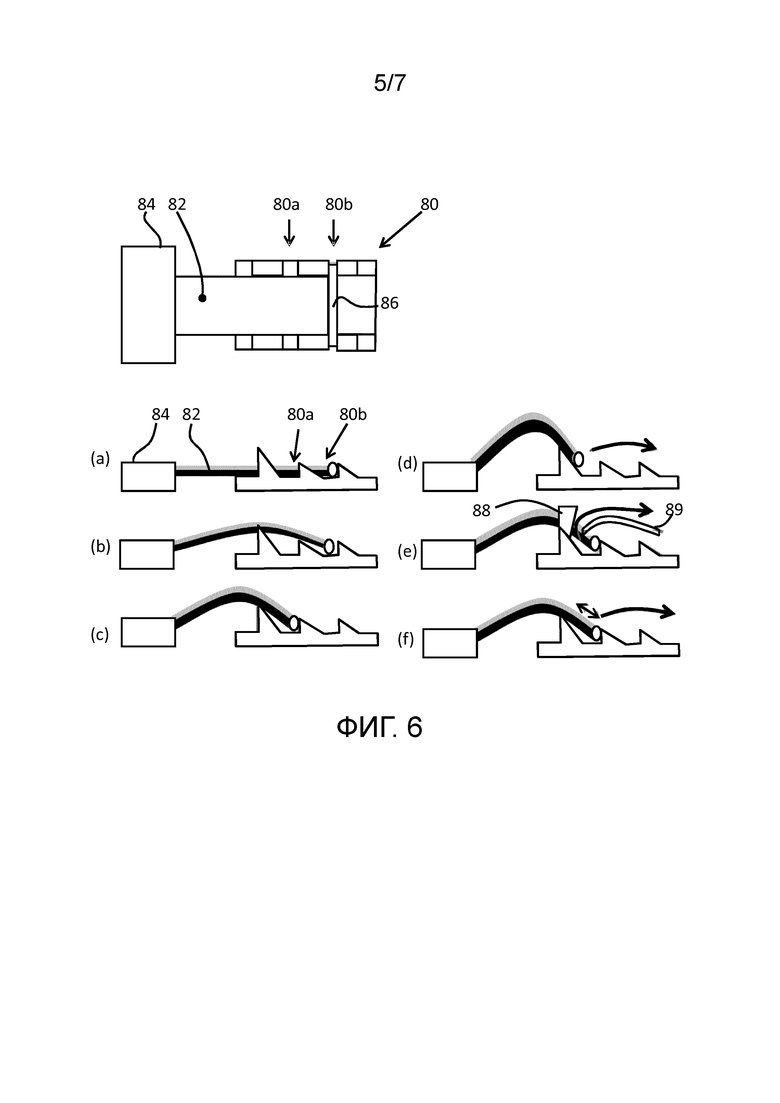
На Фиг. 6 показан четвертый пример устройства на основе электроактивного полимера;
На Фиг. 7 показан пятый пример устройства на основе электроактивного полимера согласно; и
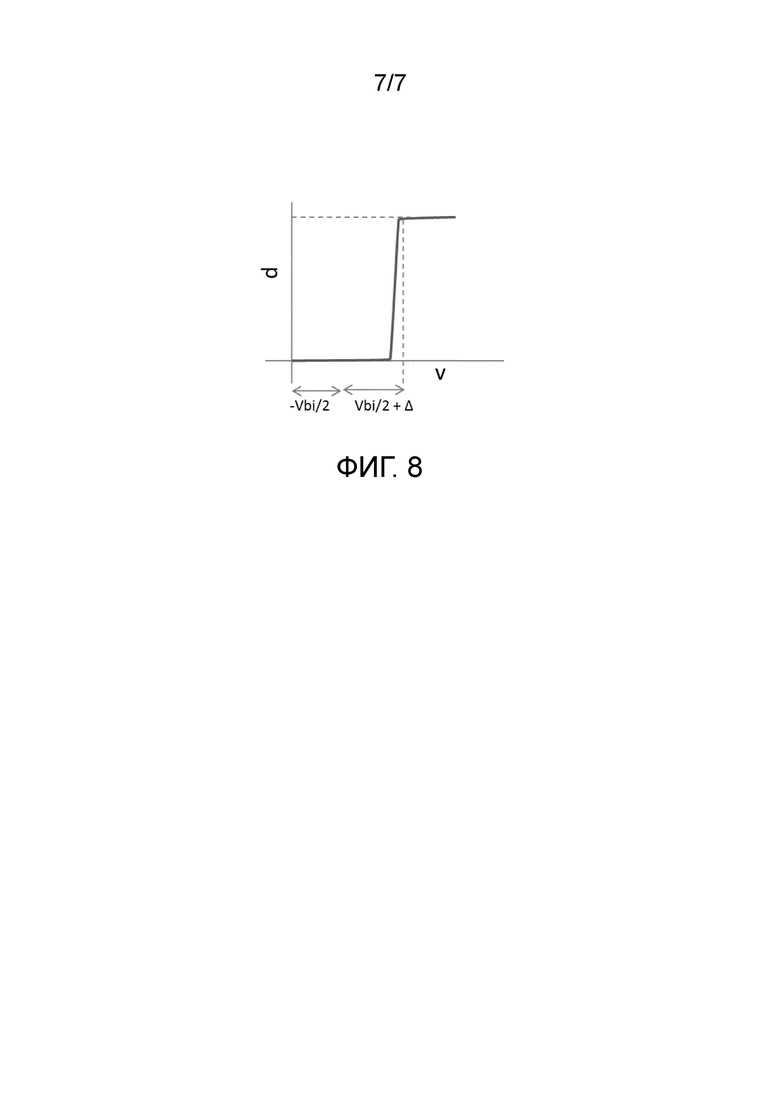
На Фиг. 8 показан график зависимости выхода от напряжения возбуждения устройства.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Устройства с Фиг. 1 и 2 описаны в вводной части этой заявки. Устройство с Фиг. 2 является первым примером, основанным на электроактивном полимере (ЭАП) в качестве активного материала, в котором активный материал прикреплен к носителю.
На Фиг. 3 показано первое, основанное на ЭАП устройство, в котором пластинка подложки (носитель) 50 объединена с материалом 52 актюации, включающим ЭАП, так что бистабильное устройство состоит из ЭАП в комбинации (в соединении) с подложкой. Этим образуется структура актюатора, описанная со ссылкой на Фиг. 2. При ней имеется электродная конструкция, которая может принимать сигнал возбуждения для осуществления возбуждения ЭАП. Возбуждение вызывает изгиб структуры. Подложка или носитель является частью механической структуры, которая также включает в себя части 56 и 58, между которыми актюатор ограничен по горизонтали (закреплен или зафиксирован) так, что подложка (и в этом случае также вся структура актюации) в некоторой степени изогнута даже в случае, когда сигнал возбуждения не подается. Когда происходит ЭАП, ЭАП в комбинации с носителем переходит из состояния 1 в состояние 2. После переключения возбуждение актюации прекращается и ЭАП в комбинации с носителем остается в состоянии 2 (состоянии 1 для диэлектрического устройства). Следовательно, структура актюации остается в состоянии 2. Следует отметить, что по существу нет необходимости в предварительном напряжении подложки, и это означает, что когда структура актюации не ограничена между частями 56 и 58, она может быть практически плоской. Следовательно, регулярные, легко изготовляемые структуры актюации можно использовать для создания устройства, которое является как бистабильным, так и компактным. Использование единственного ЭАП может означать, что для сброса устройства в начальное состояние необходимо внешнее усилие, см. состояние 3 на Фиг. 3, где стрелкой показана приложенная внешнее усилие. Это устройство может быть полезным в интерактивном устройстве, таком как кнопка на пользовательском интерфейсе (ПИ).
Таким образом, структура актюации может переключаться между вогнутой и выпуклой формами. Любые термины «выше» и «ниже», или «вверх» и «вниз», или «направленный вверх» и «направленный вниз», используемые ниже, следует понимать соответствующим образом в том смысле, что они просто означают относительные положения.
Части 56 и 58 могут быть частью зажимного приспособления или рамы. В свою очередь она может быть представлена в части корпуса или может быть частью корпуса более крупного устройства.
На Фиг. 4 показана модификация системы с Фиг. 3, в которой бистабильная механическая пластинка 60 объединена (прикреплена к) со двумя слоями 62 актюации (включающим ЭАП 1) и 64 (включающим ЭАП 2), так что бистабильное устройство включает в себя два ЭАП в качестве неотъемлемой части выгнутого диска или подложки, зажатой между фиксированными концами 56 и 58. Использование двух ЭАП означает, что можно реверсировать устройство при использовании возбуждения. По существу это устройство включает в себя первую структуру актюации (с ЭАП 62) и вторую структуру актюации (с ЭАП 64) с совместно используемым носителем 60.
Функции устройства являются точно такими же, как функции устройства с Фиг. 3, но дополнительный материал актюации используется для сброса диска обратно в первоначальное состояние при использовании другого сигнала возбуждения вместо внешнего усилия или линии давления. Могут быть выполнены соединение с устройством возбуждения и возбуждение. Таким образом, такое устройство может иметь два входа для сигналов возбуждения, один для структуры актюации и один для дополнительной структуры актюации. В этом случае обе структуры электрически возбуждаются при использовании одного устройства возбуждения. Поэтому каждая из структур содержит два электрода; по одному на каждой стороне слоя ЭАП. Чтобы уменьшить количество проводов, подходящих к электродам, один электрод структуры актюации и один электрод дополнительной структуры актюации соединены электрически. При этом можно поддерживать одинаковое напряжение относительно «земли», предпочтительно нуль В. В таком случае только два входных электрода, один от структуры актюации и один от дополнительной структуры актюации, можно использовать для приложения напряжений к каждому из других двух остальных электродов. При создании разности напряжений между общим электродом и одним из остальных электродов будет приводиться в действие либо структура актюации, либо дополнительная структура актюации. Если активные материалы различаются, то соединенные электроды можно разъединить, чтобы получить большую степень свободы при возбуждении. Однако при этом потребуются более сложные возбудители.
На Фиг. 4 показаны различные этапы активизации актюатора, при этом показано, что только во время переключения из одного состояния в другое состояние требуется активизировать любой ЭАП. Достигаемый эффект, то есть перемещение выпученного актюатора, является дискретным эффектом с только двумя состояниями. Во время актюации ЭАП происходит изменение состояния.
На этапе 1 устройство находится в стабильном состоянии с направленной вниз деформацией и без активизации слоев ЭАП.
На этапе 2 показана актюация только верхнего ЭАП 62 для переключения состояния в направленное вверх деформированное состояние.
На этапе 3 устройство остается в стабильном состоянии с направленной вверх деформацией без активизации слоев ЭАП.
На этапе 4 при актюации только нижнего ЭАП 64 происходит переключение состояния в направленное вниз деформированное состояние.
На Фиг. 3 и 4 механически бистабильный слой и слой (слои) электроактивного полимера соединены друг с другом для образования пластинчатой структуры. Это соединение друг с другом можно получать при использовании клея или другого средства присоединения.
В качестве альтернативы устройству с Фиг. 4, в котором носитель является общим для актюаторов, можно использовать два отдельных актюатора, каждый из которых имеет форму с Фиг. 3, и затем ориентировать их относительно друг друга таким образом, чтобы носители были расположены задними сторонами друг к другу.
На Фиг. 5 показана модификация устройства с Фиг. 4, в котором ЭАП 72, 74 предусмотрены на противоположных сторонах края бистабильной механической пластинки (подложки) 70.
В этом примере используется такой же принцип получения обратимого эффекта благодаря применению двух слоев ЭАП, но их длины ограничены только частью поверхности выгнутого диска. Всего лишь необходимо, чтобы слои ЭАП были достаточными для наведения требуемого механического перемещения.
Вследствие этого слой (слои) электроактивного полимера простираются только по участку площади механически бистабильного слоя, например, на краевом участке.
На Фиг. 5 показаны четыре этапа из цикла работы устройства.
На этапе 1 устройство находится в стабильном состоянии с направленной вверх деформацией и без активизации слоев ЭАП.
На этапе 2 показана актюация только нижнего ЭАП 74 для переключения состояния в направленное вниз деформированное состояние.
На этапе 3 устройство остается в стабильном состоянии с направленной вниз деформацией без активизации слоев ЭАП.
На этапе 4 при актюации только верхнего ЭАП 72 состояние переключается в направленное вверх деформированное состояние.
Только во время переключения из одного стабильного состояния в другое требуется активизация ЭАП, вследствие чего получается выгнутый актюатор с дискретным перемещением и с только двумя состояниями. Во время актюации электроактивного полимера происходит изменение состояния.
Актюаторы согласно изобретению могут быть в виде пакетов слоев, содержащих материал актюатора и носитель, расположенные с чередованием. Все эти последовательные слои могут быть прикреплены друг к другу. Таким образом, актюатор с Фиг. 3 или 4 фактически может содержать многочисленные слои 50 и 52 или 60, 62 и 64, расположенные с чередованием.
На Фиг. 5 показано выводное отверстие для выравнивания давления в случае переключения.
В примерах, приведенных выше, использована механическая структура, которая деформируется между стабильными состояниями. Механическая структура является достаточно жесткой для удерживания слоя или слоев ЭАП в деформированном состоянии даже в случае, когда сигнал возбуждения прекращается.
Альтернатива заключается в удерживания слоя ЭАП в определенном положении после снятия сигнала возбуждения путем использования структуры типа защелки. Например, механическая структура может содержать удерживающее устройство, которое имеет множество положений удерживания, в соответствии с которыми слой электроактивного полимера может удерживаться в невозбужденном состоянии, при этом каждое положение удерживания соответствует отличающемуся положению актюатора. По существу это соответствует ситуации, в которой один из фиксированных концов 56 или 58 с Фиг. 3 и 4 из предшествующих примеров имеет многочисленные положения относительно другого фиксированного конца. Поэтому каждое из положений удерживания определяется квазификсированным концом.
На Фиг. 6 показан пример, в котором механическая структура содержит удерживающее устройство 80, которое имеет множество положений 80а, 80b удерживания (в этом примере показаны два), в которых слой электроактивного полимера может удерживаться в невозбужденном состоянии, при этом каждое положение удерживания соответствует отличающемуся положению актюатора.
Устройство показано на Фиг. 6(а) на виде в плане. На Фиг. 6(b)-6(d) показано устройство, возбуждаемое для перехода актюатора из одного положения в другое.
Слой 82 ЭАП показан как двухслойная структура с частью ЭАП и носителем, но отсутствует механически бистабильный элемент, как в примерах, приведенных выше. Свойство бистабильности придается удерживающим устройством 80.
Слой ЭАП имеет первую краевую часть, которая, как показано, зафиксирована в опоре 84, а противоположный край 86, который является подвижным, в частности, в одной из выемок 80а, 80b.
Актюация слоя ЭАП используется для перемещения края 86 слоя ЭАП в одну из выемок для перехода из одного стабильного состояния в другое.
При актюации ЭАП отклоняется кверху. Вследствие этого отклонения правый край будет перемещаться вовнутрь. Перемещающийся край 86 имеет стержень, который перемещается по снабженной выемками направляющей. Выемки образованы так, что край ЭАП не может с легкостью переместиться обратно после того, как он прошел по выемке. В невозбужденном состоянии выемка по-прежнему захватывает край слоя ЭАП, препятствуя перемещению его обратно в первоначальное положение.
Это приводит к получению двух или более стабильных состояний в последовательности актюаций.
На Фиг. 6(b) показано использование положения наиболее удаленной выемки. С началом актюации слоя ЭАП начинается деформирование слоя, показанное на Фиг. 6(с). По существу, как показано на Фиг. 6(d), край приводится в положение поверх гребня, ведущего к месту нахождения ближайшей выемки.
Устройство можно сбрасывать электрически или механически.
Гребень позади самой внутренней выемки является более высоким и, как показано на Фиг. 6(е), это можно использовать для реализации функции сброса.
Краевой стержень поднимается выше ската и это сопровождается быстрым разъединением, в результате которого стержень перемещается поверх другой выемки обратно в исходное состояние.
На Фиг. 6(е) показано, каким образом возвратная направляющая 88 и желобчатая направляющая 89 могут быть добавлены для содействия перемещению ЭАП по другим выемкам обратно в первоначальное положение.
Как показано на Фиг. 6(f), малый сигнал переменного тока может быть приложен для покачивания ЭАП туда и обратно, что позволит краевому стержню перескочить через вертикальную кромку выемки с возвращением обратно в первое состояние.
В ином случае внешнее усилие можно использовать для возврата подвижного края в исходное стабильное состояние, например, путем опускания снабженной выемками направляющей при нажатии кнопки.
Из приведенных выше различных примеров должно быть ясно, что изобретение включает в себя преобразование аналоговой характеристики структуры актюации в цифровую (два состояния или больше чем два состояния) функциональную характеристику путем осуществления взаимодействия структуры актюации с другим механическим компонентом, который служит для дискретизации перемещения (актюации) структуры актюации. Этот механический компонент объединен со структурой актюации.
Известны материалы, пригодные для структур актюации. Электроактивные полимеры включают в себя, но без ограничения, следующие подклассы: пьезоэлектрические полимеры, электромеханические полимеры, релаксорные ферроэлектрические полимеры, электрострикционные полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры, сопряженные полимеры, ионные полимер-металлические композиты, ионные гели и полимерные гели.
Подкласс электрострикционных полимеров включает в себя, но без ограничения, поливинилиденфторид (PVDF), поливинилиденфторид-трифторэтилен (PVDF-TrFE), поливинилиденфторид-трифторэтилен-хлорфторэтилен (PVDF-TrFE-CFE), поливинилиденфторид-трифторэтилен-хлортрифторэтилен (PVDF-TrFE-CTFE), поливинилиденфторид-гексафторпропилен (PVDF-HFP), полиуретаны или смеси их.
Подкласс диэлектрических эластомеров включает в себя, но без ограничения: акрилаты, полиуретаны, силиконы.
Подкласс сопряженных полимеров включает в себя, но без ограничения: полипиррол, поли-3,4-этилендиокситиофен, поли(p-фениленсульфид), полианилины.
Ионные устройства могут быть основаны на ионных полимер-металлических композитах (IPMC) или сопряженных полимерах. Ионный полимер-металлический композит (IPMC) представляет собой синтетический композитный наноматериал, который воспроизводит характеристику искусственной мышцы при приложении напряжения или электрического поля.
Первым значительным подклассом возбуждаемых полем ЭАП являются пьезоэлектрические и электрострикционные полимеры. В то время как электромеханическая характеристика традиционных пьезоэлектрических полимеров является ограниченной, шаг вперед в улучшении этой характеристики привел к поливинилиденфторидным релаксорным полимерам, которые характеризуются спонтанной электрической поляризацией (возбуждаемой полем ориентацией). Эти материалы можно предварительно деформировать для улучшения характеристики в направлении деформирования (предварительное деформирование приводит к лучшей ориентации молекул). Как правило, используют металлические электроды, поскольку деформирование обычно осуществляют в умеренном режиме (1-5%). Кроме того, можно использовать электроды других видов (такие как из проводящих полимеров, углеродной сажи на основе нефти, гелей или эластомеров и т.д.). Электроды могут быть непрерывными или сегментированными.
Другим представляющим интерес подклассом возбуждаемых полем ЭАП является подкласс диэлектрических эластомеров. Тонкую пленку этого материла можно заключать между гибкими электродами, образуя конденсатор с параллельными пластинами. В случае диэлектрических эластомеров натяжение Максвелла, наводимое приложенным электрическим полем, приводит к возникновению нагрузки на пленку, заставляя ее сокращается по толщине и расширяться по площади. Характеристику деформации обычно расширяют путем предварительного деформирования (в рамках, необходимых для поддержания предварительного деформирования). Деформации могут быть значительными (10-300%). Кроме того, при этом накладываются ограничения на виды электродов, которые могут использоваться: при слабых и умеренных деформациях могут предполагаться металлические электроды и проводящие полимерные электроды, в случае режима сильных деформаций обычно используют углеродную сажу на основе нефти, гели или эластомеры. Электроды могут быть непрерывными или сегментированными.
Первым значительным подклассом ионных ЭАП являются ионные полимер-металлические композиты (IPMC). Ионные полимер-металлические композиты состоят из набухающей в растворителе ионообменной полимерной мембраны, помещенной между двумя тонкими металлическими или углеродными электродами, при этом необходимо использовать электролит. Типичными материалами электродов являются Pt, Gd, углеродные нанотрубки, проводящие полимеры, Pd. Типичными электролитами являются водные растворы Li+ и Na+. Когда прикладывается поле, катионы обычно перемещаются на сторону катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Растяжение области катода приводит к напряженному состоянию остальной части полимерной матрицы, вследствие чего происходит изгибание к аноду. При изменении полярности приложенного напряжения изменяется направление изгиба. Хорошо известными полимерными мембранами являются Nafion® и Flemion®.
Другим значительным подклассом ионных полимеров являются сопряженные/проводящие полимеры. Актюатор из сопряженного полимера обычно состоит из электролита, заключенного между двумя слоями сопряженного полимера. Электролит используется для изменения степени окисления. Когда к полимеру прикладывается потенциал через электролит, электроны присоединяются к полимеру или отводятся от него, возбуждая окисление и восстановление. Восстановление приводит к сокращению, окисление приводит к расширению.
В некоторых случаях, когда полимер не обладает достаточной электропроводностью (исходя из величины), добавляют тонкопленочные электроды. Электролит может быть жидкостью, гелем или твердым веществом (например, комплексом полимеров с большим молекулярным весом и солей металлов). Наиболее распространенными сопряженными полимерами являются полипиррол (PPy), полианилин (PANi) и политиофен (PTh).
Актюатор можно также образовать из углеродных нанотрубок (УНТ), суспендированных в электролите. Электролит образует двойной слой с нанотрубками, что делает возможной инжекцию зарядов. Эта двухслойная инжекция зарядов считается основным механизмом в актюаторах на основе углеродных нанотрубок. Углеродная нанотрубка действует как снабженный электродами конденсатор в сочетании с зарядом, инжектируемым в углеродную нанотрубку, который затем уравновешивается электрическим двойным слоем, образующимся при перемещении электролита к поверхности углеродной нанотрубки. Изменение заряда атомов углерода приводит к изменению длины связи С-С. В результате можно наблюдать расширение и сокращение одной углеродной нанотрубки.
Более конкретно, ионные полимер-металлические композиты состоят из ионного полимера, подобного нафиону или флемиону, поверхности которого химически или физически покрыты проводниками, такими как платина или золото, или углеродными электродами. В соответствии с приложенным напряжением миграция и перераспределение ионов вследствие напряжения, приложенного к полоске ионного полимер-металлического композита, приводят к изгибной деформации. Полимер является набухающей в растворителе ионообменной полимерной мембраной. Поле вызывает перемещение катионов к стороне катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Растяжение области катода приводит к напряженному состоянию остальной части полимерной матрицы, вследствие чего происходит изгибание к аноду. При изменении полярности приложенного напряжения изменяется направление изгиба.
Если осажденные электроды расположены с образованием несимметричной конфигурации, приложенное напряжение может вызывать деформации всех видов, такие как деформация кручения, качения, закручивания, поворота и несимметричная деформация изгиба.
Во всех этих примерах дополнительные пассивные слои могут быть предусмотрены для оказания влияния на электрическую и/или механическую характеристику слоя ЭАП в ответ на приложенное электрическое поле.
Слой ЭАП каждого узла может быть заключен между электродами. Электроды могут быть выполнены растягиваемыми, чтобы они следовали за деформаций слоя ЭАП. Материалы, пригодные для электродов, также известны и могут быть выбраны, например, из группы, состоящей из тонких пленок металлов, таких как золото, медь или алюминий, или органических проводников, таких как углеродная сажа, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например поли(3,4-этилендиокситиофен)-поли(стиролсульфонат) (PEDOT:PSS). Кроме того, можно использовать металлизированные полиэфирные пленки, такие как металлизированные полиэтилентерефталатные (PET), покрытые, например, алюминием.
IPMC состоят из ионного полимера, подобного нафиону или флемиону, поверхности которого химически или физически покрыты проводниками, такими как платина или золото, или углеродными электродами. В соответствии с приложенным напряжением миграция и перераспределение ионов вследствие напряжения, приложенного к полоске ионного полимер-металлического композита, приводят к изгибной деформации. Полимер является набухающей в растворителе ионообменной полимерной мембраной. Поле вызывает перемещение катионов к стороне катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Растяжение области катода приводит к напряженному состоянию остальной части полимерной матрицы, вследствие чего происходит изгибание к аноду. При изменении полярности приложенного напряжения изменяется направление изгиба. В предшествующем уровне техники (который полностью включен в эту заявку путем ссылки) можно обнаружить, что оптоактивные материалы иногда также называют фоточувствительными, изменяющими форму материалами. Примеры описаны в:
- «Photo-responsive shape-memory and shape-changing liquid crystal polymer networks», авторы Danish Iqbal и Muhammad Haris Samiullah, источник Materials 2013, 6, 116-142;
- «Large amplitude light-induced motion in high elastic modulus polymer actuators», авторы Harris K.D., Cuypers R., Scheibe P., van Oosten C.L., Bastiaansen C.W.M., Lub J., Broer D.J., источник J. Mater. Chem. 2005, 15, 5043-5048;
- «Synthesis of a photoresponsive liquid crystalline polymer containing azobenzene», авторы Chensha Li, Chi-Wei Lo, Difeng Zhu, Chenhui Li, Ye Liu, Hongrui Jiang, источник Macromol. Rapid Commun. 2009, 30, 1928-1935, 2009;
- «Optical nano and micro actuator technology», под редакцией George K. Knopf, Yukitoshi Otani, CRC Press, Taylor and Francis Group, 2013;
- «Light-driven actuators based on polymer films», авторы Sergey S. Sarkisov, Michael J. Curley, LaQuieta Huey, Aisha B. Fields, источник Optical Engineering, Volume 45, Issue 3, March 2006; и
- «Large amplitude light-induced motion in high elastic modulus polymer actuators», авторы Harris K.D., Cuypers R., Scheibe, P., Oosten, C.L. van, Bastiaansen, C.W.M., Lub, J. и Broer D.J., источник Journal of Materials Chemistry (2005), 15(47), 5043-5048.
Специалистам в данной области техники должно быть очевидно, что, когда любые материалы из уровня техники используются в устройстве согласно изобретению, то соответствующее устройство для формирования надлежащего сигнала возбуждения также можно использовать.
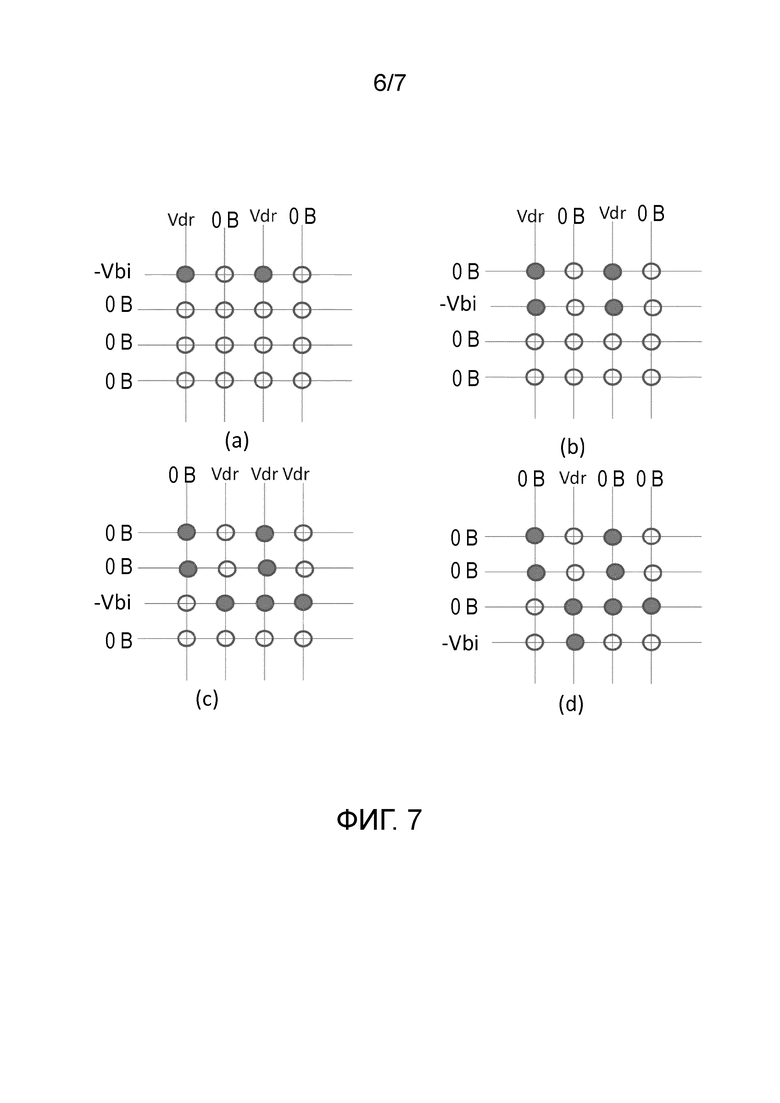
Согласно изобретению в конфигурации пассивной матричной решетки используется устройства актюации. Первый пример схемы возбуждения пассивной матрицы поясняется с обращением к фиг. 7. Этой схемой обеспечивается одновременная адресация строки пассивной матрицы при общем сбросе.
Матрица представляет собой двумерную матрицу из строк и столбцов бистабильных ЭАП устройств, каждое из которых имеет бистабильное напряжение (Vbi), только при котором может происходить переключение, и напряжение (Vres) сброса, обратное по действию напряжению переключения. Поэтому, если ЭАП-устройство из исходного состояния отсутствия актюации возбуждают напряжением выше бистабильного напряжения (Vbi), актюатор будет оставаться в состоянии актюации, когда напряжение снимают. Если ЭАП-устройство возбуждают напряжением ниже бистабильного напряжения (Vbi) (или равным ему), актюатор будет возвращаться состояние отсутствия актюации, когда напряжение снимают. Кроме того, если ЭАП-устройство из исходного состояния актюации возбуждают напряжением выше напряжения (Vres) сброса, актюатор возвращается в состояние отсутствия актюации, когда напряжение снимают.
В предпочтительных вариантах осуществления бистабильное напряжение (Vbi) превышает дополнительное напряжение (Vdr) возбуждения, что необходимо для уверенности в том, что ЭАП-устройство будет в достаточной степени переходить границу бистабильной точки и оставаться в состоянии актюации, а именно: Vbi>Vdr.
Матрицу возбуждают возбудителями строк, способными создавать сигналы адресации с двумя уровнями 0V (0 В) и -Vbi, и возбудителями столбцов, способными создавать сигналы возбуждения с двумя уровнями 0V (0 В) и Vdr.
Адресация матрицы происходит способом, показанным на фиг. 7, при этом для примера рассматривается матрица 4×4. При выполнении этапов адресации:
1. В матрице все бистабильные актюаторы на основе ЭАП находятся в состоянии отсутствия актюации.
2. Все строки первоначально адресуют с 0V (0 В). В этой ситуации максимальная разность напряжений на концах ЭАП-устройства составляет Vdr (максимальное напряжение с возбудителя столбцов). Поскольку оно ниже Vbi, все актюаторы на основе ЭАП в матрице остаются в режиме отсутствия актюации после снятия напряжения.
3. Первую строку адресуют с -Vbi. Это показано на фиг. 7(а). Два столбца возбуждают напряжением Vdr и два столбца возбуждают напряжением 0V (0 В). В этой ситуации разность напряжений на концах двух ЭАП-устройств составляет Vdr+Vbi (при использовании максимального напряжения Vdr с возбудителя столбцов). Поскольку оно выше Vbi, эти два актюатора на основе ЭАП в строке будут возбуждаться до состояния актюации, и они будут находиться в состоянии актюации даже после снятия напряжения. Эти два ЭАП-устройства показаны закрашенными кружками. ЭАП-устройства, не находящиеся в состоянии актюации, показаны кружками, которые не закрашены. Разность напряжений на концах других двух ЭАП-устройств составляет 0V+Vbi=Vbi (при использовании минимального напряжения 0V (0 В) с возбудителя столбцов), вследствие чего эти два ЭАП-устройства в строке, исходно находившиеся в состоянии актюации, при снятии напряжения будут релаксировать до состояния отсутствия актюации. Это происходит потому, что ЭАП-устройство следует возбуждать напряжением выше Vbi, чтобы оно оставалось в состоянии актюации после снятия напряжения.
4. Вторую строку адресуют с -Vbi, как показано на фиг. 7(d). Вследствие бистабильной природы ЭАП-устройств ЭАП-устройство в первой строке остаются в состоянии актюации. Кроме того, в этом примере те же самые два столбца возбуждают напряжением Vdr возбуждения, а два столбца возбуждают напряжением 0V (0 В). В этой ситуации разность напряжений на концах двух ЭАП-устройств составляет Vdr+Vbi (при использовании максимального напряжения Vdr с возбудителя столбцов). Поскольку оно выше Vbi, эти два ЭАП-устройства во второй строке будут находиться в состоянии актюации и будут оставаться в состоянии актюации после снятия напряжения. Разность напряжений на концах других двух ЭАП-устройств составляет 0V+Vbi=Vbi (при использовании минимального напряжения 0V (0 В) с возбудителя столбцов), вследствие чего эти ЭАП-устройства в строке будут находиться в состоянии актюации, из которого будут возвращаться в состояние отсутствия актюации после снятия напряжения. В конце этого этапа заданные ЭАП-устройства в первой и второй строках остаются в состоянии актюации.
5. Третью строку адресуют с -Vbi, как показано на фиг. 7(с). ЭАП-устройства в первой и второй строках остаются в состоянии актюации, поскольку максимальное напряжение составляет Vdr (и Vdr<Vbi). Теперь три столбца возбуждают напряжением Vdr возбуждения и только один столбец напряжением 0V (0 В). В этой ситуации разность напряжений на концах трех ЭАП-устройств составляет Vdr+Vbi (при использовании максимального напряжения Vdr с возбудителя столбцов). Поскольку оно выше Vbi, эти три ЭАП-устройства в третьей строке будут находиться в состоянии актюации, которое будет сохраняться после снятия напряжения. Разность напряжений на концах другого ЭАП-устройства составляет 0V+Vbi=Vbi (при использовании минимального напряжения 0V (0 В) с возбудителя столбцов), вследствие чего это ЭАП-устройство в третьей строке будет находиться в состоянии актюации, из которого будет возвращаться в состояние отсутствия актюации после снятия напряжения. В конце этого этапа заданные ЭАП-устройства в первой, второй и третьей строках остаются в состоянии актюации.
6. Четвертую строку адресуют с -Vbi, как показано на фиг. 7(d). Кроме того, ЭАП-устройства в первой, второй и третьей строках остаются в состоянии актюации. Теперь один столбец возбуждают напряжением Vdr возбуждения, а три столбца возбуждают напряжением 0V (0 В). В этой ситуации разность напряжений на концах одного из ЭАП-устройств составляет Vdr+Vbi (при использовании максимального напряжения Vdr с возбудителя столбцов) и это ЭАП-устройство будет находиться в состоянии актюации, которое будет сохраняться после снятия напряжения. Разность напряжений на концах других трех ЭАП-устройств составляет 0V+Vbi=Vbi (при использовании минимального напряжения 0V (0 В) с возбудителя столбцов), вследствие чего эти три ЭАП-устройства будут находиться в состоянии актюации, из которого будут возвращаться в состояние отсутствия актюации после снятия напряжения. В конце этого этапа заданные ЭАП-устройства во всех строках остаются в состоянии актюации.
7. В конце этапа адресации все напряжения могут быть сняты со строк и столбцов и ЭАП-устройства останутся в том же самом состоянии актюации. В этом заключается требуемый бистабильный режим, обеспечивающий работу матрицы ЭАП-устройств при малой мощности потребления.
8. Когда требуется новая картина актюации ЭАП, согласно этому варианту осуществления выполняют сброс актюаторов во всех строках и столбцах матрицы.
Режим сброса можно реализовывать при использовании трех уровней напряжения возбуждения по строке или столбцу, чтобы можно было осуществлять сброс по каждой строке или столбцу. Для этого можно использовать возбудитель с низким напряжением. В ином случае всю матрицу можно сбрасывать путем приложения ряда напряжений (Vres) ко всем возбудителям строк или же ряда напряжений Vres-Vbi ко всем возбудителям строк при адресовании к ним всем с Vbi. Однако в таком случае возбудители строк могут быть 2-уровневыми возбудителями.
В ином случае сброс можно выполнять механически при использовании, например, давления.
Все ЭАП-устройства сбрасывают в состояние отсутствия актюации. Поскольку ЭАП-устройства являются симметрично деформируемыми, напряжение сброса должно переводить ЭАП в состояние, противоположное состоянию актюации, с помощью дополнительного механизма. Как пояснялось выше для актюаторов типа описанных с обращением к фиг. 6, этого можно достигать приложением напряжения (Vres) сброса. Это напряжение сброса можно подавать на все столбцы при подаче 0V (0 В) на все строки или -Vbi можно подавать на все строки и Vres-Vbi подавать на столбцы. Вместо этого сброс можно подавать на все строки при приложении -Vres к строкам и поддержании столбцов при 0V (0 В). При условии, что напряжение на концах каждого ЭАП-устройства достигает Vres, можно использовать любое сочетание напряжений.
В ином случае сброс может прикладываться актюатором, противодействующим функциональному актюатору, способным возбуждать механический сброс. Этот противодействующий актюатор может быть одиночным актюатором или набором отдельных актюаторов, которые все соединены с одним и тем же возбудителем (сброса). Различные возможные конфигурации с использованием многочисленных ЭАП-устройств, позволяющих осуществлять функцию электрического сброса, пояснены выше.
Когда необходима новая картина актюации, приступают к адресации матрицы, опять построчно, как описано выше, вследствие чего может быть образована новая картина актюации.
Вторым примером схемы возбуждения пассивной матрицы является модификация схемы возбуждения, поясненная с обращением к фиг. 5, предназначенная для построчной адресации и также для построчного сброса. Модификация необходима только для этапа 8, приведенного выше.
Когда необходима новая картина актюации на основе ЭАП, сброс применяют одновременно только к одной строке матрицы. Следовательно, как описано выше, сброс строки адресуют для целой строки, вследствие чего может быть создана новая картина актюации в этой строке.
Для сброса одной строки ЭАП-устройства во всех других строках должно иметься напряжение ниже Vbi+Vdr, чтобы исключался сброс их. Кроме того, для исключения любой реакции ЭАП другие строки следует поддерживать при 0V (0 В). ЭАП-устройства в сбрасываемых строках должны иметь приложенное напряжение, которое превышает Vres. Например, сбрасываемая строка может иметь приложенное напряжение -Vres и все другие строки могут поддерживаться при 0V (0 В). Все столбцы могут поддерживаться при 0V (0 В).
Таким образом, необходимо осуществлять адресацию только тех строк, которые требуется сбрасывать. Кроме того, ЭАП-устройства в не сброшенных строках будут продолжать осуществлять актюацию без прерывания актюации.
Как упоминалось выше, возможны различные механизмы сброса. На фиг. 3 показан один возможный механизм сброса, основанный на приложении силы.
В ином случае ЭАП-устройства могут быть склеенными друг с другом, но все же их можно возбуждать отдельно друг от друга. В этом случае при актюации одного ЭАП-устройства оба ЭАП-устройства будут изгибаться, поскольку они склеены друг с другом, но усилие, действующее на бистабильную крышку, создается только одним ЭАП. Кроме того, при актюации только второго ЭАП создается усилие, достаточное для приведения бистабильной крышки в другое состояние.
В схеме возбуждения, поясненной выше, используется построчная адресация ЭАП-устройств. В других вариантах осуществления может быть желательной адресация нескольких строк ЭАП-устройств (с одним и тем же набором состояний актюации ЭАП) в один и тот же момент времени, вследствие чего адресация будет происходить более быстро. Это достигается приложением адресуемого напряжения к более чем одной строке ЭАП-устройства в одно и то же время.
Ясно, что, поскольку матрица на чертеже является симметричной, можно применять возбудитель адресации к столбцам и подводить данные к строкам, вследствие чего в матрице будет осуществляться адресация одного столбца (или многочисленных столбцов) за один раз.
В приведенных выше примерах рассматривался только двухуровневый (0V (0 В) и Vdr) возбудитель. Следствием этого будут интегральные схемы возбудителей наименьшей стоимости. Однако в альтернативных вариантах осуществления также может быть предпочтительно, чтобы ЭАП-устройства оставались в состоянии частичной актюации после снятия напряжения, и был возможен, например, мультистабильный актюатор с Фиг. 8. Чтобы сделать его возможным, можно использовать возбудитель с многочисленными напряжениями, достигающими Vdr.
Кроме того, для актюаторов возможны возбудители пониженного напряжения с идеальной ступенчатой функцией, показанной на Фиг. 8. Это означает, что Vdr=0. Возбудители пониженного напряжения можно использовать, например, когда величина напряжения Vbi по меньшей мере 5 раз больше величины напряжения Vdr возбуждения. В таком случае в случае идеальной ступеньки, показанной на Фиг. 8, столбцы могут возбуждаться напряжениями V1>Vbi/2 и строки напряжением V2=-Vbi/2.
V1 несколько выше, чем Vbi/2, например Vbi/+Δ. Вместе с тем, V1+V2>Vbi является достаточным для реализации состояния актюации, которое будут оставаться после снятия напряжения. Преимущество этого заключается в том, что напряжение возбуждения каждого возбудителя можно поддерживать как можно ниже (что ограничит стоимость интегральных схем). Кроме того, этим будет гарантироваться, что напряжение на ЭАП-устройствах, не находящихся в состоянии актюации в матрице, будет намного ниже, чем Vbi, что позволит иметь некоторый запас на снижение бистабильного напряжения ЭАП с течением времени или вследствие флуктуаций температуры. Кроме того, ЭАП-устройства в состоянии отсутствия актюации находятся под воздействием только напряжения Vbi/2, а не Vbi, что также может повысить срок службы.
Кроме того, все значения V1 до Vbi и V2 до Vdr возможны в качестве промежуточных значений, когда необходимо компромиссное решение между напряжением возбуждения и диапазоном актюации ЭАП.
В приведенных выше вариантах осуществления отрицательное напряжение прикладывают к адресуемым строкам и положительное напряжение прикладывают к линиям данных. Можно изменять полярность обоих напряжений с получением той же самой актюации. Действительно, в дальнейших вариантах осуществления может быть предпочтительно изменять полярность напряжений через регулярные промежутки времени, чтобы получать инверсное возбуждение, которое можно использовать для предотвращения ухудшения характеристики ЭАП-устройства с течением времени.
Таким образом, устройство согласно изобретению можно использовать как одиночный актюатор или же может быть линия или матрица устройств, например, для обеспечения регулирования двумерного или трехмерного контура.
Изобретение можно использовать при многих применениях ЭАП, включая примеры, в которых представляет интерес пассивная матричная решетка, в частности, благодаря пороговой функции, описанной выше для некоторых примеров актюаторов.
При многих применениях основная функция изделия зависит от (локального) воздействия, осуществляемого тканью человека, или приведения в действие контактирующих с тканью интерфейсов. При таких применениях актюаторы на основе ЭАП обеспечивают уникальные преимущества, в основном вследствие низкого коэффициента формы, гибкости и высокой плотности энергии. Поэтому ЭАП можно легко объединять с гибкими 3-мерными и/или миниатюрными изделиями и интерфейсами. Примерами таких применений являются:
Средства косметического ухода за кожей, такие как устройства для стимулирования кожи в виде основанных на ЭАП кожных пластырей, которые создают постоянное или циклическое растяжение кожи для натяжения кожи или для уменьшения морщин;
Дыхательные устройства с интерфейсной маской пациента, которое имеет основанную на ЭАП активную упругую прокладку или уплотнение для приложения по нормали переменного давления к коже, которое приводит к уменьшению или ограничению красных пятен на лице;
Электрические бритвы с адаптивной бреющей головкой. Высоту соприкасающихся поверхностей кожи можно регулировать при использовании актюаторов на основе ЭАП, чтобы оказывать влияние на состояние равновесия между близостью и раздражением;
Устройства для очистки рта, такие как воздушная зубная нить с динамическим сопловым актюатором для улучшения опрыскивания, особенно в пространствах между зубами. В ином случае могут иметься зубные щетки с перемещающимися пучками щетинок;
Устройства потребительской электроники или сенсорные панели, которые обеспечивают локальную тактильную обратную связь через посредство матрицы преобразователей на основе ЭАП, которая встроена в пользовательский интерфейс или находится вблизи него;
Катетеры с регулируемым наконечником для обеспечения легкой навигации в извилистых кровеносных сосудах.
Еще одна категория релевантной области применения, в которой достигаются преимущества от использования актюаторов на основе ЭАП, имеет отношение к модификации света. Оптические элементы, такие как линзы, отражающие поверхности, матрицы и т.д., могут быть сделаны адаптивными путем изменения формы или положения при использовании актюаторов на основе ЭАП. В данном случае преимущества от использования ЭАП заключаются, например, в более низком потреблении энергии.
Другие изменения к раскрытым вариантам осуществления могут быть осознаны и осуществлены специалистами в области техники при применении на практике заявленного изобретения, на основании изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает других элементов или этапов, а упоминание элемента в единственном числе не исключает множества таких элементов. То, что некоторые признаки перечисляются во взаимно различных зависимых пунктах формулы изобретения, не означает, что сочетание этих признаков не может использоваться с достижением преимущества. Любые позиций в формуле изобретения не предполагаются ограничивающими объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АКТУАТОРА НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2723889C2 |
| ДАТЧИКИ НА ОСНОВЕ ЭЛЕКТРОАКТИВНЫХ ПОЛИМЕРОВ И СПОСОБЫ ВОСПРИЯТИЯ | 2016 |
|
RU2723887C2 |
| ПРИВОДНОЕ И СЕНСОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2721302C2 |
| УСТРОЙСТВО МОЛОКООТСОСА | 2017 |
|
RU2754631C2 |
| АКТУАТОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2728492C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ СЧИТЫВАНИЯ, ОСНОВАННЫЙ НА ЭЛЕКТРОАКТИВНОМ МАТЕРИАЛЕ | 2017 |
|
RU2720128C2 |
| ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ АКТЮАТОР | 2011 |
|
RU2568944C2 |
| ДАТЧИК ПОТОКА И СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА | 2017 |
|
RU2768159C2 |
| УСТРОЙСТВО ФОТОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАНИЯ И СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ | 2015 |
|
RU2611209C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ФИЗИОЛОГИЧЕСКОГО ПАРАМЕТРА | 2017 |
|
RU2750352C2 |
Изобретение относится к устройствам актюации. Сущность: система устройств актюации, содержит матричную решетку устройств актюации, первые сигнальные линии и вторые сигнальные линии для подачи сигнала возбуждения на устройство актюации и устройство возбуждения для подачи сигналов с по меньшей мере двумя возможными уровнями в первые сигнальные линии и сигналов с по меньшей мере двумя возможными уровнями во вторые сигнальные линии. При этом сигналы подаются так, что принимаемый устройством актюации сигнал возбуждения является сочетанием сигнала одного уровня из первых сигнальных линий и одного сигнала из вторых сигнальных линий. Каждое устройство актюации содержит структуру актюации, содержащую носитель и электроактивный материал, прикрепленный к носителю, для вызывания изгиба и/или изменения изгиба в ответ на возбуждение электроактивного материала и механическую структуру для задания по меньшей мере первого стабильного механического состояния и второго стабильного механического состояния, отличающегося от первого стабильного механического состояния структуры актюации, путем механического удерживания структуры актюации в изогнутой конфигурации в одном из первого и второго стабильных механических состояний. При возбуждении структура актюации может переключаться из первого стабильного механического состояния во второе стабильное механическое состояние. Причем только один из четырех возможных уровней совместных сигналов обеспечивает переключение из первого стабильного состояния во второе стабильное состояние устройства. Структура актюации является практически плоской в одном из первого и второго стабильных механических состояний, когда устройство актюации не возбуждается. Технический результат: обеспечение возможности сохранения устройства в состоянии актюации без непрерывного приложения сигнала возбуждения. 2 н. и 12 з.п. ф-лы, 8 ил.
1. Система устройств актюации, содержащая:
матричную решетку устройств актюации,
первые сигнальные линии и вторые сигнальные линии для подачи сигнала возбуждения на устройство актюации и
устройство возбуждения для подачи сигналов с по меньшей мере двумя возможными уровнями в первые сигнальные линии и сигналов с по меньшей мере двумя возможными уровнями во вторые сигнальные линии, при этом сигналы подаются так, что принимаемый устройством актюации сигнал возбуждения является сочетанием сигнала одного уровня из первых сигнальных линий и одного сигнала из вторых сигнальных линий,
причем каждое устройство актюации содержит:
- структуру актюации, содержащую носитель (50, 60, 70) и электроактивный материал (52, 62, 64, 72), прикрепленный к носителю, для вызывания изгиба и/или изменения изгиба по меньшей мере носителя в ответ на возбуждение электроактивного материала и
- механическую структуру (56, 58, 80) для задания по меньшей мере первого стабильного механического состояния и второго стабильного механического состояния, отличающегося от первого стабильного механического состояния структуры актюации, путем механического удерживания структуры актюации в изогнутой конфигурации в одном из первого и второго стабильных механических состояний,
причем при возбуждении структура актюации может переключаться из первого стабильного механического состояния во второе стабильное механическое состояние,
причем только один из четырех возможных уровней совместных сигналов обеспечивает переключение из первого стабильного состояния во второе стабильное состояние устройства, и
отличающаяся тем, что структура актюации является практически плоской в одном из первого и второго стабильных механических состояний, когда устройство актюации не возбуждается.
2. Система по п. 1, причем:
- носитель (60) имеет первую сторону и вторую сторону, противоположную первой стороне, при этом электроактивный материал (62) прикреплен к первой стороне; и
- структура актюатора содержит дополнительный электроактивный материал (64), прикрепленный ко второй стороне, причем дополнительный электроактивный материал вызывает изгиб и/или изменение изгиба структуры актюации в ответ на дополнительное возбуждение электроактивного материала, так что при дополнительном возбуждении структура актюации может переключиться из второго стабильного механического состояния в первое стабильное механическое состояние.
3. Система по п. 1 или 2, причем носитель и любые электроактивные материалы расположены в виде пакета слоев.
4. Система по любому из предшествующих пунктов, причем как в первом, так и втором механическом состоянии актюатор удерживается в изогнутой конфигурации.
5. Система по п. 4, причем изогнутая конфигурация в первом стабильном механическом состоянии противоположна изогнутой конфигурации во втором стабильном механическом состоянии.
6. Система по любому из предшествующих пунктов, причем носитель (70) имеет площадь, а электроактивный материал (72) и/или дополнительный электроактивный материал простираются только по участку упомянутой площади.
7. Система по любому из предшествующих пунктов, причем механическая структура содержит удерживающее устройство (80), которое имеет множество положений удерживания (80a, 80b), в которых структура актюации может удерживаться в стабильном механическом состоянии, при этом каждое положение удерживания соответствует отличающемуся положению актюатора в по меньшей мере одном из положений удерживания, механически удерживающем структуру актюации в изогнутой конфигурации в по меньшей мере одном из первого и второго стабильных механических состояний.
8. Система по п. 7, причем структура актюации включает в себя фиксированный край, зафиксированный к ограничивающему устройству, и подвижный край и причем удерживающее устройство служит для удерживания подвижного края (86) структуры актюации на разных расстояниях от фиксированного края структуры актюации и содержит множество удерживающих выемок.
9. Система по любому из предшествующих пунктов, причем каждое из устройств актюации содержит электродную конструкцию для приложения электрического сигнала к электроактивному материалу для возбуждения и/или дополнительного возбуждения.
10. Система по любому из предшествующих пунктов, причем для каждого устройства актюации:
сигнал возбуждения, имеющий уровень совместных сигналов ниже первого порога Vbi, обеспечивает актюацию из первого стабильного состояния ко второму стабильному состоянию, но с возвратом в первое стабильное состояние после снятия сигнала возбуждения; и
сигнал возбуждения, имеющий уровень совместных сигналов выше второго порога, обеспечивает актюацию из первого стабильного состояния во второе стабильное состояние без возврата в первое стабильное состояние после снятия сигнала возбуждения, и при этом второй порог имеет величину, которая превышает величину первого порога Vbi на первый предел Vdr.
11. Система по п. 10, причем для одной из первой сигнальной линии и второй сигнальной линии два возможных уровня сигналов являются нулем и величиной первого порога Vbi, а для другой из первой сигнальной линии и второй сигнальной линии два возможных уровня сигналов являются нулем и величиной первого предела Vdr, при этом ненулевые уровни сигналов имеют противоположные полярности.
12. Система по п. 10 или 11, причем:
- величина первого порога Vbi больше, чем величина первого предела Vdr, или
- величина первого порога Vbi по меньшей мере в пять раз больше величины первого предела Vdr.
13. Система по любому из пп. 10-12, причем устройство возбуждения выполнено так, что:
- для каждого из упомянутого множества устройств актюации подача сигнала сброса возбуждения, имеющего совместные сигналы с уровнем выше третьего порога Vres, обеспечивает сброс в первое стабильное состояние после снятия сигнала возбуждения; и
- при этом система выполнена с возможностью приема внешнего входного сигнала в виде механического сброса для упомянутого множества устройств актюации.
14. Способ работы системы устройств актюации по любому предшествующему пункту, включающий подачу сигналов с по меньшей мере двумя возможными уровнями в первую сигнальную линию и сигналов с по меньшей мере двумя возможными уровнями во вторую сигнальную линию, при этом сигналы подают так, что принимаемый устройством актюации сигнал возбуждения является сочетанием сигнала одного уровня из первой сигнальной линии и одного из второй сигнальной линии, при этом только один из четырех возможных уровней совместных сигналов обеспечивает переключение из первого стабильного состояния во второе стабильное состояние устройства актюации.
| US 7737608 B2, 15.06.2010 | |||
| US 8237324 B2, 07.08.2012 | |||
| US 8552846 B2, 08.10.2013 | |||
| US 20070200466 A1, 30.08.2007 | |||
| US 4383195, 10.05.1983 | |||
| EP 1014416 B1, 14.04.2004 | |||
| WO 2014030963 A1, 27.02.2014 | |||
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ИЗГИБА И МОДУЛЬ ИЗ МНОЖЕСТВА ПЬЕЗОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ ИЗГИБА | 1999 |
|
RU2197038C2 |

