ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к сенсорным устройствам, которые используют электроактивные материалы, такие как пьезоэлектрические материалы и электроактивные полимеры, и к способам считывания с использованием таких устройств.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Пьезоэлектрические материалы хорошо известны на протяжении многих десятилетий, наиболее распространенным примером является пьезоэлектрическая керамика, цирконат-титанат свинца.
Электроактивные полимеры (EAP) представляют собой новый класс материалов в области электрически чувствительных материалов. EAP могут работать как сенсоры (датчики) или исполнительные элементы и могут быть легко изготовлены в различных формах, что позволяет легко интегрировать их в самые разнообразные системы.
Были разработаны материалы с характеристиками, такими как усилие срабатывания и напряжение (деформация), которые значительно улучшились за последние десять лет. Технологические риски были снижены до уровней, приемлемых для разработки изделия, так что EAP коммерчески и технически становятся все более интересными. Преимущества EAP включают в себя низкую мощность, малый форм-фактор, гибкость, бесшумную работу, точность, возможность высокого разрешения, быстрое время отклика и циклическое срабатывание.
Повышенная производительность и особые преимущества материала EAP приводят к пригодности к новым применениям.
Устройство EAP может использоваться в любом применении, в котором требуется малая величина перемещения компонента или детали на основе электрического срабатывания. Аналогично, эта технология может использоваться для восприятия малых перемещений.
Использование EAP позволяет выполнять функции, которые были невозможны раньше, или дает большое преимущество перед обычными решениями сенсоров/исполнительных элементов ввиду сочетания относительно большой деформации и силы в малом объеме или тонкого форм-фактора по сравнению с обычными исполнительными элементами. EAP также обеспечивают бесшумную работу, точное электронное управление, быстрый отклик и большой диапазон возможных частот срабатывания, например 0-20 кГц.
Устройства, использующие электроактивные полимеры, можно разделить на материалы с полевым возбуждением и с ионным возбуждением.
Примерами EAP с полевым возбуждением являются диэлектрические эластомеры, электрострикционные полимеры (такие как релаксорные полимеры на основе PVDF или полиуретаны) и жидкокристаллические эластомеры (LCE).
Примерами EAP с ионным возбуждением являются сопряженные полимеры, полимерные композиты на основе углеродных нанотрубок (CNT) и композиты на основе ионного полимера-металла (IPMC).
Возбуждаемые полем EAP приводятся в действие электрическим полем через прямую электромеханическую связь, в то время как механизм срабатывания для ионных EAP предусматривает диффузию ионов. Оба класса имеют несколько членов семейства, каждый из которых имеет свои преимущества и недостатки.
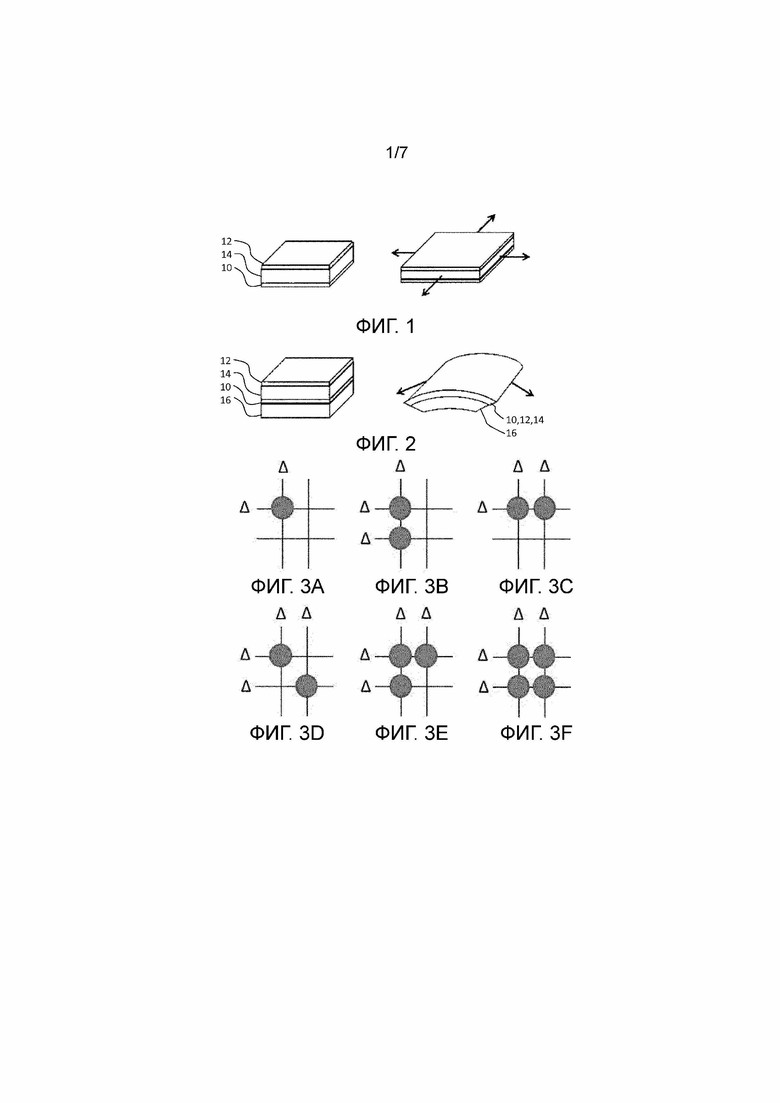
На фиг. 1 и 2 показаны два возможных режима работы устройства EAP.
Устройство содержит слой 14 электроактивного полимера, расположенный между электродами 10, 12 на противоположных сторонах слоя 14 электроактивного полимера.
На фиг. 1 показано устройство, которое не зажато. Напряжение используется, чтобы заставить слой электроактивного полимера растягиваться во всех направлениях, как показано.
На фиг. 2 показано устройство, которое сконструировано таким образом, что растяжение возникает только в одном направлении. Устройство поддерживается несущим слоем 16. Напряжение используется, чтобы заставить слой электроактивного полимера выгибаться или изгибаться.
Характер этого движения возникает, например, из-за взаимодействия между активным слоем, который растягивается при воздействии, и пассивным несущим слоем. Для получения асимметричного изгиба вокруг оси, как показано, может применяться молекулярная ориентация (растяжение пленки), вызывая движение в одном направлении.
Растяжение в одном направлении может быть результатом асимметрии в электроактивном полимере, или это может быть результатом асимметрии свойств несущего слоя, или комбинацией того и другого.
В применении считывания, деформация, вызванная воспринимаемой внешней силой, может привести к измеримому изменению импеданса. Альтернативно, некоторые электроактивные материалы, такие как пьезоэлектрические материалы, генерируют электрический заряд в ответ на внешнее силовое стимулирующее воздействие.
В некоторых применениях, решетка сенсоров (датчиков) может быть полезна, например, для измерения площади контакта между устройством и человеческим телом. Например, площадь контакта между сенсорной панелью и пальцем человека измеряется в системе, описанной в US 2012/0086651. В этом документе описывается сенсорная панель, которая включает в себя пассивную матрицу пьезоэлектрических полимерных сенсоров. Форма считывающих электродов представляет собой множество электродных линий, расположенных на верхней и нижней поверхностях пьезоэлектрического слоя таким образом, что верхние и нижние электродные линии перпендикулярны друг другу.
Чтобы определить уникальные шаблоны (комбинации) положений в такой матрице, необходимо индивидуально считывать сенсорные элементы или последовательно сканировать строки и столбцы. Это требует сложных проводных соединений (которые индивидуально соединяют все пикселы) и/или электроники (переключателей строк и столбцов).
Этой сложности можно избежать, выполняя параллельное считывание строк и столбцов, но недостатком является то, что уже невозможно определить уникальные комбинации положений. Таким образом, традиционная концепция пассивной матрицы не позволяет определять уникальные комбинации положений с параллельным считыванием строк и столбцов.
Поэтому существует необходимость в простой схеме матричной адресации, которая позволяет осуществлять обнаружение комбинации, приложенной к сенсорной матрице.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Изобретение определяется формулой изобретения.
Согласно примерам в соответствии с первым аспектом изобретения, обеспечено сенсорное устройство, содержащее:
решетку пассивной матрицы электроактивных сенсорных элементов, расположенных в строках и столбцах; и
решетку линий строк и решетку линий столбцов с сенсорным элементом в каждом пересечении, причем каждый сенсорный элемент генерирует сенсорный сигнал, когда считывается внешний ввод,
причем каждый сенсорный элемент генерирует двоичный сенсорный сигнал, так что общий сигнал сенсорной решетки в каждой строке и в каждом столбце позволяет определить любую комбинацию внешних вводов.
В этом устройстве можно определить комбинацию сенсорных элементов, которые воспринимают ввод, с использованием схемы адресации пассивной матрицы. В такой схеме пассивной матрицы, сенсорные элементы остаются связанными с проводниками строк и столбцов без каких-либо изолирующих переключателей.
Сенсорные элементы генерируют сенсорный ток. Устанавливая токи так, чтобы они принимали (приблизительно) только два возможных значения, например, нуль и ток включения, можно определить, сколько активных элементов находится в каждой строке и в каждом столбце. Таким образом, можно идентифицировать уникальную комбинацию активных элементов. Сенсорный элемент генерирует двоичный необработанный выходной сигнал, который затем предоставляется на линиях строк и столбцов или между ними.
Каждый сенсорный элемент может содержать бистабильный элемент, имеющий две конфигурации.
Согласно примерам в соответствии со вторым аспектом изобретения, обеспечено сенсорное устройство, содержащее:
решетку пассивной матрицы из электроактивных сенсорных элементов, причем каждый сенсорный элемент генерирует сенсорный сигнал, когда воспринимается внешний ввод,
причем каждый сенсорный элемент генерирует сенсорный сигнал с отличающейся частотной характеристикой, так что отдельные сенсорные элементы могут быть идентифицированы из объединенного сенсорного сигнала, тем самым позволяя определять любую комбинацию внешних вводов.
В этом устройстве, вновь можно определить комбинацию сенсорных элементов, которые считывают ввод с использованием схемы адресации пассивной матрицы. Каждый сенсорный элемент генерирует выход с конкретной идентифицируемой частотной характеристикой. Анализируя объединенный сенсорный сигнал, генерируемый сенсорной решеткой, можно идентифицировать отдельные компоненты.
Таким образом, два аспекта затрагивают общую проблему, позволяющую использовать схему пассивной матрицы для идентификации всех приведенных в действие сенсорных элементов, независимо от того, какая комбинация элементов приведена в действие. Решетка сенсорных элементов может считываться одновременно в обоих аспектах.
Во втором аспекте, каждый сенсорный элемент может содержать генерирующий ток элемент, который генерирует выходной ток в ответ на внешний ввод, и цепь реактивной нагрузки, которая преобразует выходной ток в выходной сигнал с частотной характеристикой.
Цепь реактивной нагрузки содержит, например, резонансный контур, причем резонансный контур каждого сенсорного элемента имеет различный набор значений компонентов. Эти различные значения компонентов дают желательную различную частотную характеристику.
Резонансный контур может содержать, например, параллельный LC-контур, хотя возможны и другие схемы резонансных контуров.
Сенсорный элемент может дополнительно содержать диод между генерирующим ток элементом и цепью нагрузки. Это ограничивает протекание тока.
Чтобы создать объединенный сигнал для анализа, можно использовать суммирующую цепь для суммирования сенсорных сигналов.
Приведенные выше примеры основаны на электрической частотной характеристике. Альтернативой является то, что каждый сенсорный элемент имеет отличающуюся частоту механического резонанса или отличающееся время механической релаксации. Эти различные механические частотные характеристики являются тогда идентифицируемыми в генерируемых сенсорных сигналах. Таким образом, они являются характеристиками механического резонанса, но они вновь идентифицируются в электрическом сигнале, генерируемом сенсорными элементами.
Первый аспект также обеспечивает способ считывания для считывания комбинации внешних вводов в сенсорное устройство, которое содержит решетку пассивной матрицы из электроактивных сенсорных элементов, расположенных в строках и столбцах, и решетку линий строк и решетку линий столбцов с сенсорным элементом в каждом пересечении, причем способ содержит:
генерирование сенсорного сигнала в каждом сенсорном элементе, когда считывается внешний ввод, причем сигнал сенсорного элемента содержит двоичный сенсорный сигнал; и
из общего сенсорного сигнала в каждой строке и в каждом столбце, определение комбинации внешних вводов.
Второй аспект также обеспечивает способ считывания для считывания комбинации внешних вводов в сенсорное устройство, которое содержит решетку пассивной матрицы из электроактивных сенсорных элементов, причем способ содержит:
генерирование сенсорного сигнала в каждом сенсорном элементе с отличающейся частотной характеристикой; и
из объединенного сенсорного сигнала, идентификацию индивидуальных сенсорных элементов, тем самым определяя комбинацию внешних вводов.
Каждый сенсорный элемент может содержать генерирующий ток элемент, который генерирует выходной ток в ответ на внешний ввод, и причем способ содержит преобразование выходного тока в выходной сигнал с частотной характеристикой с использованием цепи нагрузки.
Способ может содержать идентификацию сенсорных элементов в суммированных сенсорных сигналах с использованием анализа частотного спектра. Вместо этого способ может содержать обеспечение каждого сенсорного элемента с отличающейся частотой механического резонанса или отличающимся временем механической релаксации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры изобретения подробно описаны ниже со ссылкой на прилагаемые чертежи, на которых:
Фиг. 1 показывает известное устройство из электроактивного полимера, которое не зажато;
Фиг. 2 показывает известное устройство из электроактивного полимера, которое ограничено защитным слоем;
Фиг. 3 иллюстрирует проблему стандартной схемы адресации пассивной матрицы;
Фиг. 4 показывает первый пример сенсорного элемента, который может быть использован в устройстве согласно изобретению, а также его электрический отклик;
Фиг. 5 показывает, как использовать сенсорный элемент согласно фиг. 4 в сенсорной матрице;
Фиг. 6 показывает решетку пассивной матрицы сенсоров на основе схемы согласно фиг. 4;
Фиг. 7 показывает второй пример сенсорного элемента, который может быть использован в устройстве согласно изобретению;
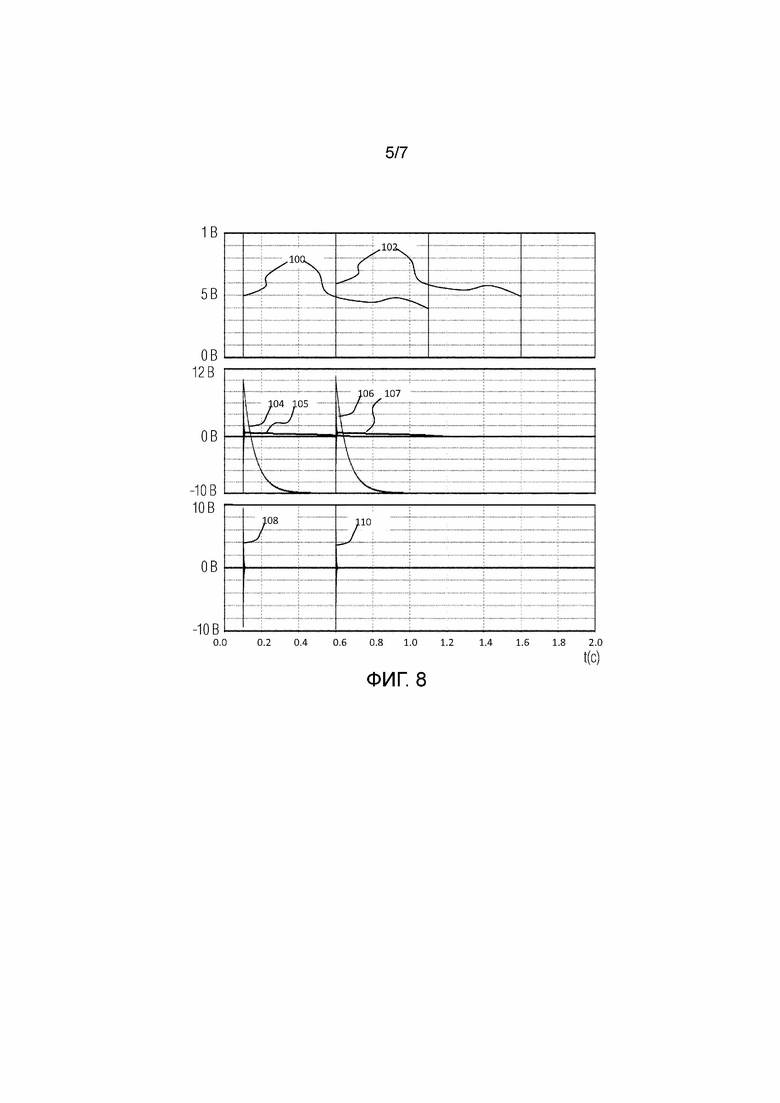
Фиг. 8 показывает электрический отклик сенсорного элемента согласно фиг. 7;
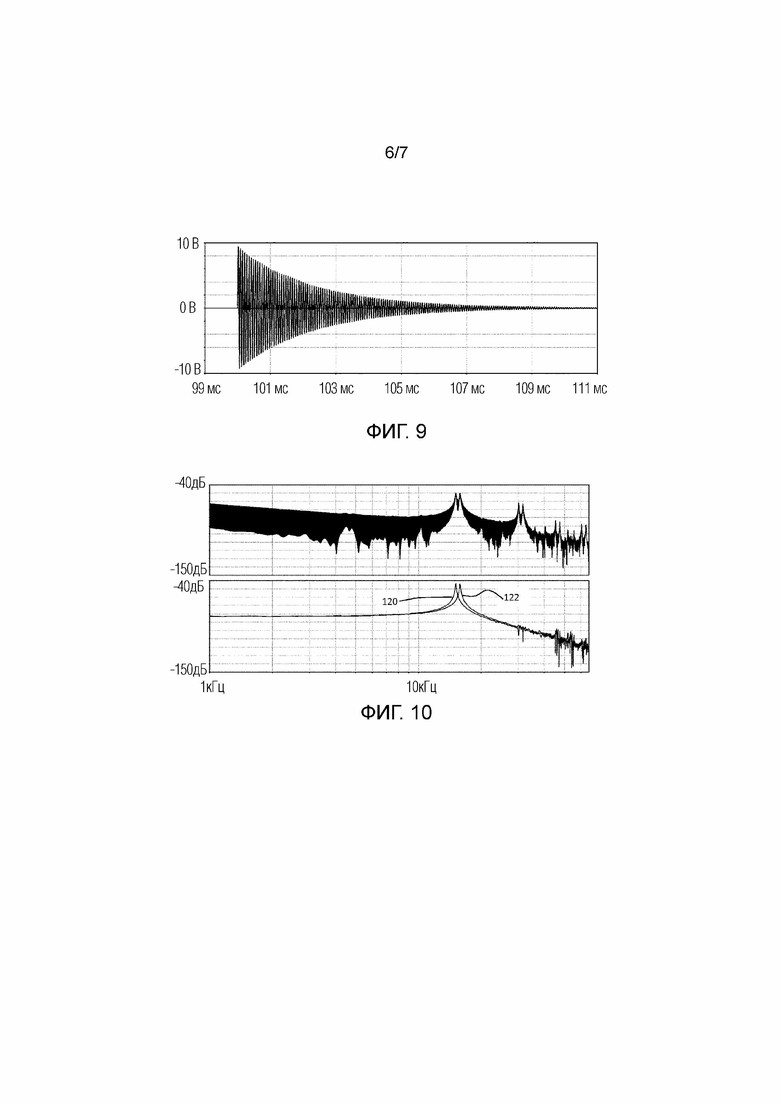
Фиг. 9 показывает увеличенный вид одной части графика согласно фиг. 8;
Фиг. 10 показывает частотный график выходного сигнала двух сенсоров согласно фиг. 7; и
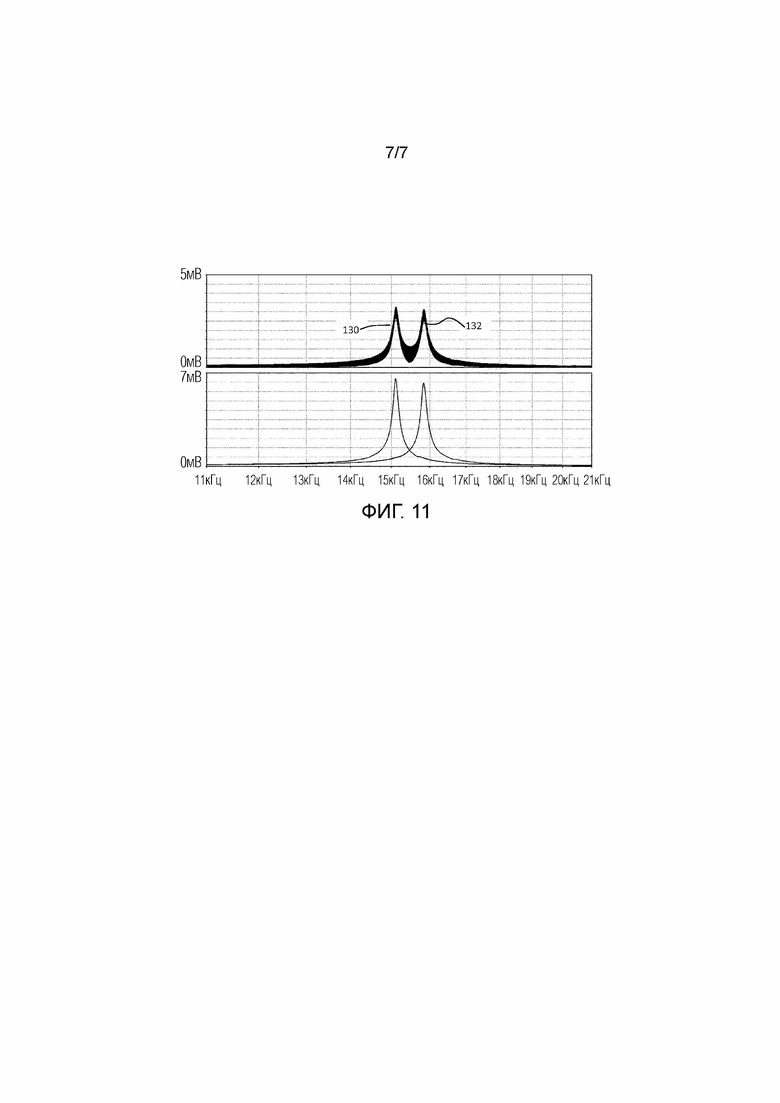
Фиг. 11 показывает частотные составляющие выходного сигнала согласно фиг. 10.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Изобретение обеспечивает сенсорное устройство, содержащее решетку пассивной матрицы электроактивных сенсорных элементов, расположенных в строках и столбцах. В одном примере, каждый сенсорный элемент генерирует двоичный сенсорный сигнал, так что общий сигнал в каждой строке и в каждом столбце позволяет определить любую комбинацию внешних вводов. Это обеспечивает первый способ определения комбинации сенсорных элементов, которые считывают ввод с использованием схемы адресации пассивной матрицы. В другом примере, каждый сенсорный элемент генерирует сенсорный сигнал с отличающейся частотной характеристикой. Это обеспечивает еще один способ определения любой комбинации внешних вводов.
Чтобы определить уникальные комбинации положения в пассивной матрице, обычно необходимо считывать пикселы индивидуально или последовательно сканировать строки и столбцы. Для этого требуется сложная проводка (которая индивидуально соединяет все пикселы) и/или электронные средства, такие как переключатели строк и столбцов.
Этой сложности можно избежать, используя параллельное считывание строк и столбцов, но недостаток заключается в том, что невозможно определить уникальные комбинации положений.
Это проиллюстрировано на фиг. 3, где показана матрица 2×2, например, пьезоэлектрических сенсоров с параллельным считыванием столбцов и строк. Таким образом, решетка сенсорных элементов содержит набор из двух проводников строк и двух проводников столбцов с сенсорным элементом на пересечении каждой строки и столбца.
Если один пиксел в этой матрице испытывает касание, как показано на фиг. 3A, электрический ток протекает через линии строк и столбцов, которые соединены с верхним и нижним электродами каждого сенсора. Уникальное местоположение пиксела может быть определено строкой и столбцом, которые показывают протекание тока. Если два пиксела в одной и той же строке или столбце испытывают касание, как показано на фиг. 3В и 3С, уникальные местоположения пикселов могут быть вновь определены номерами строк и столбцов линий электродов, которые воспринимают протекание тока.
Однако если два пиксела в разных строках и столбцах испытывают касание, как показано на фиг. 3D, или если три или более пикселов испытывают касание, как показано на фиг. 3E и 3F, уже невозможно определить их уникальные положения.
Эта проблема может быть решена, в соответствии с некоторыми примерами изобретения, путем предоставления сигнатуры (характерного признака) пикселам. Требование к сигнатуре пиксела состоит в том, что она не чувствительна к характеристикам внешнего воздействия на сенсор (например, касание), таким как уровень силы, время и скорость, поскольку эти характеристики могут варьироваться от пиксела к пикселу.
Опциями сигнатуры пиксела являются амплитуда импульса (напряжение, ток), форма импульса (напряжение, ток), направление импульса (ток протекает в линию электродов или из нее) или частота импульса.
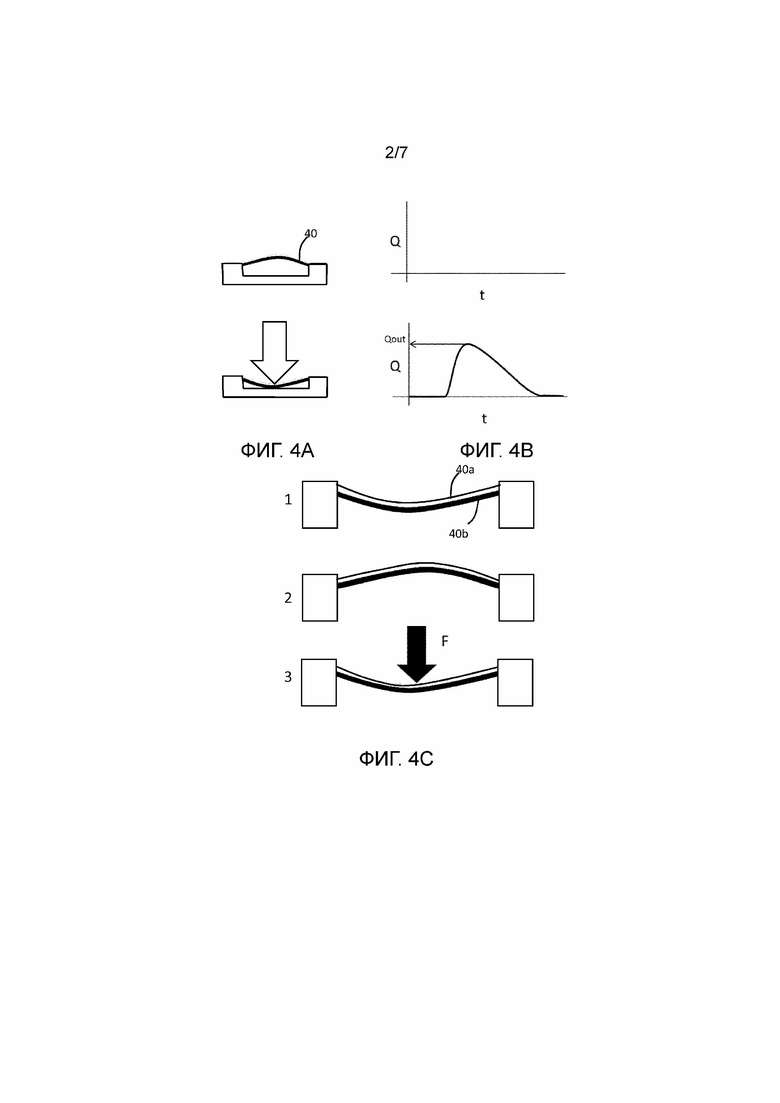
Первый пример объясняется со ссылкой на фиг. 4, на основе механически зажимаемой конструкции.
В этом примере, каждый сенсорный элемент генерирует двоичный сенсорный ток, и ток (то есть два уровня) для каждого сенсорного элемента тот же самый, так что общий ток, текущий в каждой строке и в каждом столбце, позволяет определить любую комбинацию внешних вводов.
Это требует модификации конструкции сенсорного элемента. В частности, электроактивный сенсор обычно генерирует аналоговый выход, который является функцией приложенной силы или расстояния, на котором сила прикладывается к сенсорному элементу. Чтобы создать двоичный отклик, под которым подразумевается, что имеется одно значение сигнала для отсутствия считывания и другое значение сигнала для считывания внешнего ввода, может использоваться механическая конструкция.
На фиг. 4А показан бистабильный сенсорный элемент 40. Он имеет положение в отсутствие воздействия, показанное на верхнем изображении, а при воздействии достаточной силой он защелкивается в задействованное положение, показанное на нижнем изображении. Движение сенсорного элемента между этими положениями генерирует электрический сигнал, но он по существу тот же самый для любого воздействия. Он начинается, когда порог достигнут, и имеет почти фиксированную длительность, пока новое положение не будет принято. Таким образом, имеется сигнатура для каждого сенсорного элемента в виде механического бистабильного отклика на легкое усилие, за счет использования эффекта защелкивания. Из-за этого бистабильного эффекта, отклик сенсора всегда одинаков.
Сенсорный элемент может быть смещен, чтобы сбрасываться, когда внешнее воздействие удаляется, или он может сбрасываться путем приведения в действие сенсорного элемента в качестве исполнительного элемента. Это определяет конструкцию бистабильного исполнительного элемента.
Для создания бистабильного эффекта может использоваться механический элемент, который сохраняет элемент в одном состоянии, когда нет воздействия и внешнее воздействие ниже порога, но затем позволяет ему переключиться.
Одним примером является механически бистабильный слой, который может защелкиваться между двумя стабильными состояниями, такой как прессованный металлический лист. Например, он может переключаться между выпуклым и вогнутым состоянием или, соответственно, выступающим вверх и выступающим вниз состоянием. Он может быть сформирован как крышка над сенсорным элементом.
На фиг. 4B показан соответствующий выходной сигнал. Пока сенсор остается в нечувствительном состоянии, выходной сигнал отсутствует, даже если есть внешнее воздействие, которого недостаточно для достижения порога.
Когда порог достигнут, сенсорный элемент переключается в состояние считывания, и это переключение генерирует показанный импульс тока.
Фиг. 4С показывает, что сенсорный элемент 40 может содержать двухслойную структуру, имеющую электроактивный слой 40a над листом 40b подложки. Это функционирует как исполнительный элемент и как сенсор. Когда EAP активируется, комбинация EAP-подложка переходит из состояния 1 в состояние 2, как показано на фиг. 4C. Это функционирует как процедура сброса. Внешняя сила заставляет сенсорный элемент 40 защелкиваться в нажатом состоянии, как показано состоянием 3, и это нажатие генерирует импульс заряда, показанный на фиг. 4В.
При использовании как воздействия, так и считывания, может быть выполнен сброс между каждой функцией считывания.
Путем создания выхода для всех сенсорных элементов одинаковым в пределах подходящих границ (импульс, показанный на фиг. 4B), становится возможным сделать вывод, когда больше сенсорных элементов в строке или столбце приведены в действие, учитывая амплитуду выхода. Более высокий выход указывает на то, что было нажато больше сенсорных элементов. Это устраняет проблему, заключающуюся в том, что в стандартном сенсоре амплитуда не всегда представляет количество нажатых сенсорных элементов.
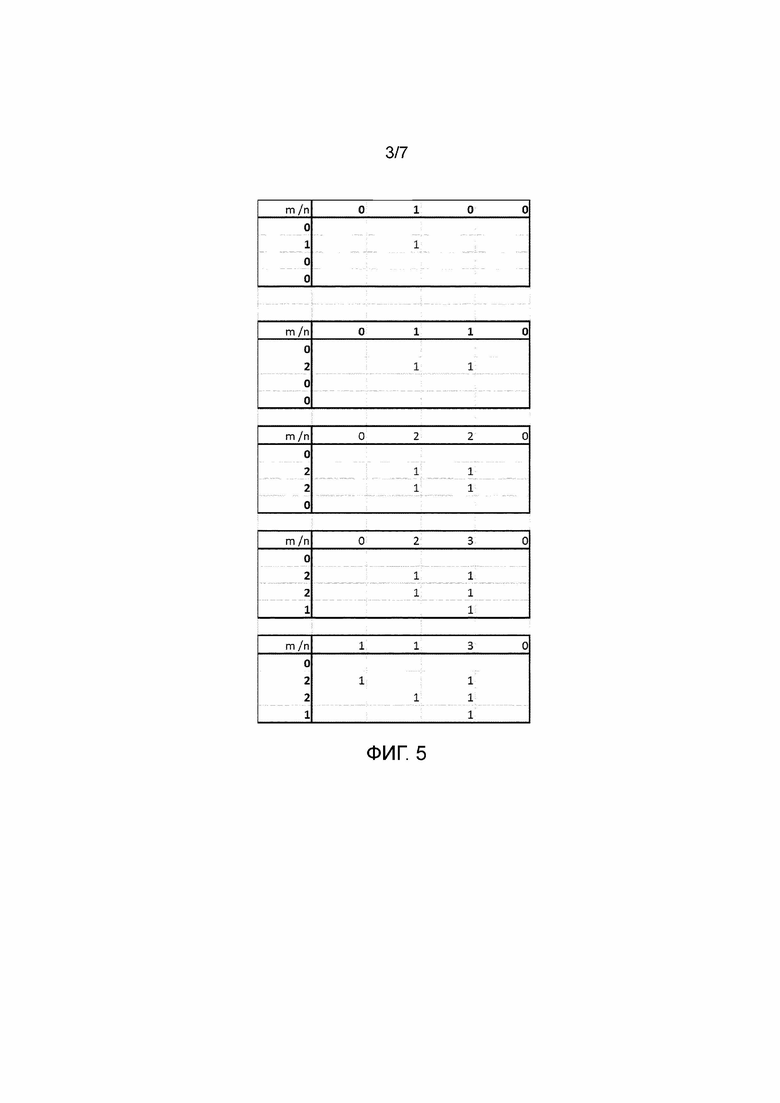
Выходной заряд (показанный как Qout на фиг. 4B) практически не зависит от приложенной силы, при условии, что сила превышает порог для защелкивания. В предположении нормализованного значения Qout=1, фиг. 5 показывает цифровую схему, которая может использоваться для определения активированных положений.
Каждая таблица на фиг. 5 показывает сенсорные элементы, которые были приведены в действие извне, с использованием ʺ1ʺ в основной таблице. Верхняя строка и левый столбец показывает ток, протекающий по проводникам столбцов и строк для решетки 4×4 сенсорных элементов. Каждая возможная комбинация (всего показаны 5 из 216 возможных комбинаций) создает уникальный набор считываний тока строк и столбцов. Таким образом, можно определить любую комбинацию внешних вводов.
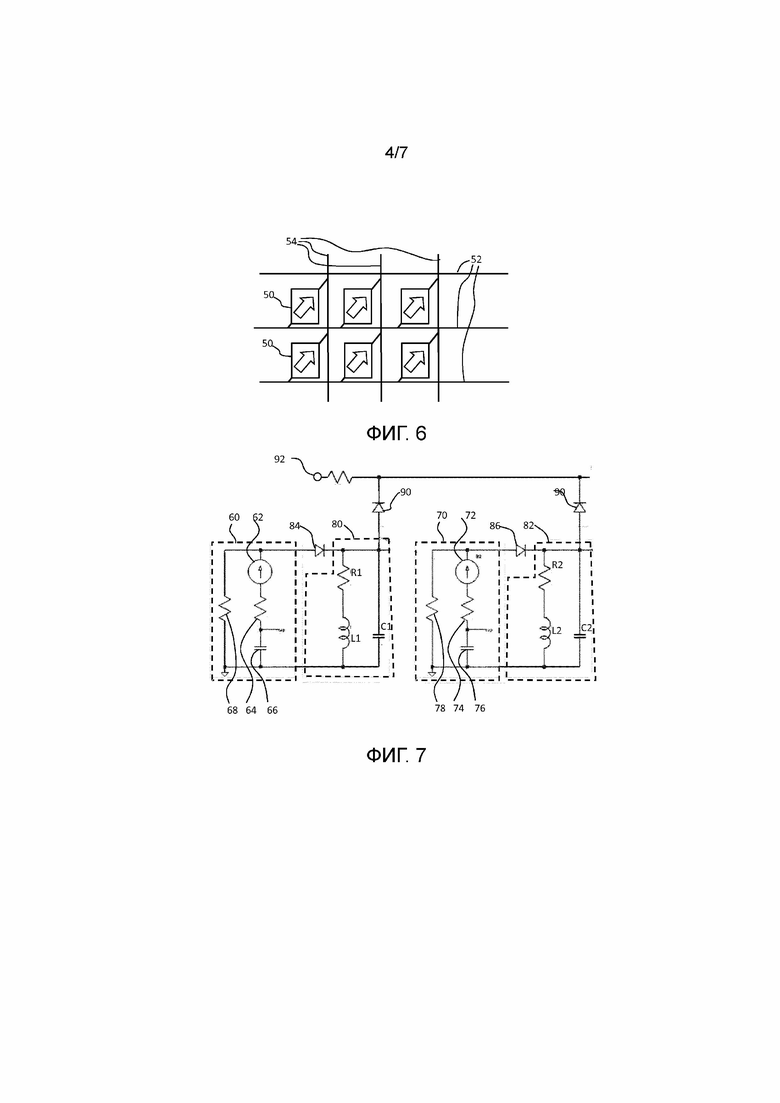
На фиг. 6 показана решетка пассивной матрицы электроактивных сенсорных элементов 50, расположенных в строках и столбцах. Имеется решетка линий 52 строк и решетка линий 54 столбцов с сенсорным элементом 50 в каждом пересечении. Общий сигнал сенсорной решетки, протекающий в каждую строку или из нее и в каждый столбец или из него, позволяет определить любую комбинацию внешних вводов, как объяснялось выше.
Приведенный выше подход основан на создании бистабильного выхода из каждого сенсорного элемента путем ограничения механического отклика каждого сенсорного элемента. Альтернативой является создание желательного бистабильного или двоичного отклика с помощью электрических средств. Например, верхний предел электрического выхода может быть наложен, например, с использованием диода Зенера (стабилитрона) для ограничения выходного напряжения (с преобразованием выходного тока в напряжение). Аналогичным образом, нижний предел может быть наложен перед генерированием выхода, вновь с использованием порогового устройства. Таким образом, выход может быть ограничен попаданием в желательный диапазон значений.
Приведенный выше подход основан на том, чтобы сделать выход из каждого сенсорного элемента одним и тем же, чтобы можно было подсчитать количество сенсорных элементов, которые формируют сигнал. Разумеется, этот подход переводит считывание в двоичную схему, так что аналоговое содержимое теряется.
Второй подход поясняется со ссылкой на фиг. 7. Этот подход основан на том, чтобы сделать выход каждого сенсорного элемента уникально идентифицируемым. В частности, каждый сенсорный элемент выполнен с возможностью генерации сенсорного сигнала с отличающейся частотной характеристикой, так что отдельные сенсорные элементы могут быть идентифицированы из комбинированного сенсорного сигнала. Это снова позволяет определить любую комбинацию внешних вводов.
Фиг. 7 основана на предоставлении уникальной резонансной частоты сенсорному элементу путем добавления определенной нагрузки в форме комплексного импеданса. Каждый сенсорный элемент затем может быть идентифицирован с помощью собственной уникальной частотной характеристики. Резонансные частоты могут быть настроены путем выбора пассивных компонентов, которые отличаются по своим значениям компонентов (например, индуктивностей или емкостей).
Когда активируется сенсорный элемент, генерируется ток, который затем используется для возбуждения осциллирующего резонансного тока в нагрузке. Путем простого суммирования выходов сенсорных элементов все генерируемые колебания могут быть объединены и затем могут быть считаны в аналоговой области, например, с использованием синхронных усилителей или аналоговых фильтров или в цифровой области с использованием алгоритмов быстрого преобразования Фурье после аналого-цифрового преобразования.
На фиг. 7 показаны два сенсорных элемента 60, 70. Каждый сенсорный элемент 60, 70 моделируется как источник 62, 72 тока последовательно с резистором 64, 74 и емкостью 66, 76, а также с параллельным резистором 68, 78.
Сенсорные элементы обычно располагаются в строках и столбцах для формирования решетки. Однако в этом случае нет необходимости рассматривать объединенные отдельные сигналы строк или сигналы столбцов, поскольку каждый сенсорный элемент имеет уникальную сигнальную комбинацию. Вместо этого все сенсорные элементы в конечном итоге соединяются с одним выходом. Таким образом, существует большая свобода позиционирования сенсорных элементов в неравномерной решетке.
Каждый сенсорный элемент ассоциирован с соответствующей комплексной нагрузкой 80, 82, которая в этом примере содержит параллельные LC-контура. LC-контура содержат последовательно соединенные индуктор и резистор L1, R1 и L2, R2 и конденсатор C1, C2 параллельно с ветвью резистора-индуктора. LC-контура отличаются только значениями конденсатора.
Соответствующий диод 84, 86 предусмотрен между каждым сенсорным элементом 60, 70 и его ассоциированной цепью нагрузки 80, 82, защищающий сенсорный элемент от высоких перенапряжений.
В показанном примере, отклики колебательных контуров объединяются с помощью простой цепи модуляции (суммирования) на основе двух дополнительных диодов 90 перед формированием объединенного выхода в узле 92.
Для целей моделирования, механический ввод, подлежащий считыванию, моделировался как прямоугольный импульс напряжения, который активирует источники 62, 72 тока каждого сенсорного элемента 60, 70.
На фиг. 8 показан результат моделирования схемы.
На верхнем изображении показан механический сенсорный ввод, обеспеченный в два сенсорных элемента. Ввод для первого сенсорного элемента показан как 100, и видны нарастающий и спадающий фронты. Ввод для второго сенсорного элемента показан как 102, и снова можно видеть нарастающий и спадающий фронты. Два периода активации перекрываются.
Когда активируется источник тока каждого сенсорного элемента, генерируется экспоненциально уменьшающийся ток, как показано графиками 104 и 106 на среднем изображении. Графики 100 и 104 относятся к сенсорному элементу 60. График 105 показывает напряжение на аноде диода 84, то есть на выходе сенсора. Графики 102 и 106 относятся к сенсорному элементу 70. График 107 показывает напряжение на аноде диода 86, то есть на выходе сенсора.
В зависимости от токов сенсорного элемента, сгенерированные колебательные отклики показаны на нижнем изображении, причем график 108 для первого сенсорного элемента и график 110 для второго сенсорного элемента.
Увеличенная часть колебательного отклика 108 показана на фиг. 9. Можно видеть колебание с экспоненциально уменьшающейся внешней огибающей, которое имеет характеристическую частоту.
Чтобы идентифицировать различия между двумя колебательными откликами, можно принять несколько известных подходов. Например, быстрое преобразование Фурье (FFT) использовалось для генерации частотных откликов из приведенных выше данных моделирования переходных процессов. Результаты показаны на фиг. 10 и 11.
На фиг. 10, верхнее изображение показывает объединенный выходной сигнал как амплитуду в зависимости от частоты, с логарифмическими шкалами. Нижнее изображение представляет отдельные отклики независимо как график 120 для первого сенсорного элемента и график 122 для второго сенсорного элемента. Наблюдается четкое различие в частотных откликах, особенно в положении центральных частот.
На фиг. 11 показан поднабор результатов моделирования на линейных шкалах. Центральная частота первого сенсорного элемента с графиком 130 составляет 15,233 кГц, а соответствующая центральная частота второго сенсорного элемента с графиком 132 составляет 15,833 кГц, поэтому может быть обнаружена разница в 700 Гц.
Со ссылкой на фиг. 7 диоды 84, 86 для защиты от перенапряжения могут не потребоваться, если сенсорные элементы могут выдерживать высокие пиковые колебательные напряжения. Если сенсорные элементы могут допускать такие высокие перенапряжения, параллельные конденсаторы C1, C2 могут также не использоваться, так что для формирования резонансного контура требуется только параллельная индуктивность. Таким образом, резонансный контур может представлять собой параллельный или последовательный резонансный контур.
Разделение полосы на выходе может быть улучшено за счет использования фильтра (нижних частот, полосового, верхних частот) в составе комплексной нагрузки. Полосовые фильтры также могут использоваться в цепи суммирования.
В приведенном выше примере используются сенсорные элементы с различным электрически индуцированным частотным откликом. Альтернативой является обеспечение отличающегося частотного отклика с использованием различных механических аспектов сенсорных элементов. Например, сенсорные элементы могут отображать разные резонансные частоты вследствие наличия разных размеров или механических свойств (например, жесткости подложек). Сенсорные элементы также могут быть сконструированы таким образом, что при нажатии, отпускании или постукивании сенсорный элемент индуцирует резонансную вибрацию.
Альтернативно, различные сенсорные элементы могут иметь различную механическую релаксацию или время отклика. Например, после отпускания, один сенсорный элемент может вернуться к своей начальной форме медленнее, чем другой, что может быть идентифицировано с помощью анализа Фурье заднего фронта выходного сигнала.
Изобретение касается прежде всего сенсорной решетки. Однако изобретение также может быть использовано для устройств, которые имеют как сенсорную функцию, так и функцию срабатывания.
Известны материалы, подходящие для слоя EAP. Электроактивные полимеры включают в себя, без ограничения указанным, следующие подклассы: пьезоэлектрические полимеры, электромеханические полимеры, релаксорные сегнетоэлектрические полимеры, электрострикционные полимеры, диэлектрические эластомеры, жидко-кристаллические эластомеры, сопряженные полимеры, композиты на основе ионного полимера-металла, ионные гели и полимерные гели.
Подкласс электрострикционных полимеров включает в себя, но без ограничения указанными, следующие:
Поливинилиденфторид (PVDF), поливинилиденфторид-трифторэтилен (PVDF-TrFE), поливинилиденфторид-трифторэтилен-хлорфторэтилен (PVDF-TrFE-CFE), поливинилиденфторид-трифторэтилен-хлортрифторэтилен) (PVDF-TrFE-CTFE), поливинилиденфторид-гексафторпропилен (PVDF-HFP), полиуретаны или их смеси.
Подкласс диэлектрических эластомеров включает в себя, но без ограничения указанными, следующие:
Акрилаты, полиуретаны, силиконы.
Подкласс сопряженных полимеров включает в себя, но без ограничения указанными, следующие:
Полипиррол, поли-3,4-этилендиокситиофен, поли(п-фениленсульфид), полианилины.
Могут быть предусмотрены дополнительные пассивные слои для влияния на поведение слоя EAP в ответ на приложенное электрическое поле.
Слой EAP может быть расположен между электродами. Электроды могут быть растяжимыми, так что они следуют деформации слоя материала EAP. Материалы, подходящие для электродов, также известны и могут, например, быть выбраны из группы, состоящей из тонких металлических пленок, таких как золото, медь или алюминий или органические проводники, такие как сажа, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например поли(3,4-этилендиокситиофен)-поли(стиролсульфонат) (PEDOT:PSS). Могут также использоваться металлизированные полиэфирные пленки, такие как металлизированный полиэтилентерефталат (PET), например, с использованием алюминиевого покрытия.
Материалы для разных слоев будут выбираться, например, с учетом модулей упругости (модулей Юнга) разных слоев.
Дополнительные к рассмотренным выше слои могут быть использованы для адаптации электрического или механического поведения устройства, например, дополнительные полимерные слои.
Устройства EAP могут быть устройствами, возбуждаемыми электрическим полем, или ионными устройствами. Ионные устройства могут быть основаны на композитах на основе ионного полимера- металла (IPMC) или сопряженных полимерах. Композит на основе ионного полимера-металла (IPMC) представляет собой синтетический композитный наноматериал, который отображает поведение искусственных мышц при приложении напряжения или электрического поля.
IPMC состоят из ионного полимера, такого как Nafion или Flemion, поверхности которого химически покрыты (плакированы) или физически покрыты проводниками, такими как платина или золото, или электродами на основе углерода. При приложении напряжения, перенос ионов и их перераспределение из-за напряжения, приложенного к полоске IPMC, приводят к деформации изгиба. Полимер представляет собой заполненную растворителем ионообменную полимерную мембрану. Поле приводит к тому, что катионы перемещаются к стороне катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в области катода приводит к напряжению в остальной части полимерной матрицы, что приводит к изгибу к аноду. Реверсирование приложенного напряжения инвертирует изгиб.
Если осажденные электроды расположены в несимметричной конфигурации, наложенное напряжение может вызывать все виды деформаций, таких как скручивание, накатка, кручение, поворот и несимметричная деформация изгиба.
Существуют различные способы реализации сенсорной функции, в зависимости от типа используемого электроактивного полимера. Приведенные выше примеры считывания основаны на сенсорах с пьезоэлектрическим откликом, то есть которые генерируют выходной ток в ответ на внешний ввод. Это известная сенсорная функциональность для электроактивных полимерных сенсоров. Например, US 2014/0139329 раскрывает пример использования электроактивного полимера для подачи тока.
Альтернативный подход заключается в мониторинге изменения импеданса электроактивного полимерного сенсора, и это, например, позволяет осуществлять считывание при воздействии одновременно.
Тип функциональности сенсора зависит от типа сенсора. Например, полимер PVDF-TrFE и полимер PVDF-TrFE-CFE, упомянутые выше, действительно являются пьезоэлектрическими. Кроме того, полимеры на основе PVDF-TrFE-CFE могут быть сконфигурированы в виде (псевдо-) пьезоэлектрического материала путем приложения малого напряжения смещения постоянного тока (обычно 1% от полномасштабного напряжения воздействия) и измерения индуцированного тока, который генерируется внешней деформацией. Этот механизм может использоваться в устройстве, которое выполняет последовательное считывание с низким напряжением и воздействие с высоким напряжением.
Диэлектрические эластомеры могут считываться с малым считывающим напряжением переменного тока (<1% от напряжения воздействия), и изменение импеданса при внешнем воздействии измеряется. Этот режим считывания также может накладываться на напряжения воздействия. По существу, это проявится в виде тока, текущего от исполнительного элемента (поскольку емкость изменяется, заряд, накопленный на конденсаторе, будет меняться, проявляясь как сигнал тока).
Наконец, ионные полимеры доставляют ток при нажатии, не требуя напряжения смещения. Это обусловлено физическим перераспределением ионов в исполнительном элементе. Более конкретно, ионы вблизи изгибающегося наружу края будут слегка отделены друг от друга, в то время как ионы на внутреннем крае слегка сжаты. Затем эти ионы будут перераспределяться для выравнивания смещения в электрическом заряде, и это движение приведет к измеримому сенсорному току (несколько микроампер). Этот эффект все еще присутствует, когда исполнительный элемент активируется.
Изобретение может применяться во многих применениях считывания EAP, где представляет интерес решетка пассивной матрицы исполнительных элементов.
Во многих применениях основная функция продукта полагается на (локальное) восприятие ткани человека или переходов, контактирующих с тканью. Таким образом, устройство можно использовать для восприятия контура тела или контакта тела, и/или следования контуру тела или контакту тела в носимых вещах, устройствах для терапии на основе изображений и средствах персонального ухода. В таких применениях, изобретение позволяет измерять местоположение и форму контакта между устройством и человеческим телом с использованием сенсорной матрицы без сложных проводных соединений и электроники.
Другие вариации раскрытых вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при практической реализации заявленного изобретения, на основе изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения, слово ʺсодержащийʺ не исключает других элементов или этапов, а форма единственного числа не исключает множественность. Сам факт, что некоторые признаки перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих признаков не может быть использована с выгодой. Любые ссылочные позиции в формуле изобретения не должны толковаться как ограничивающие объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2745005C2 |
| УСТРОЙСТВО АКТЮАЦИИ | 2016 |
|
RU2714307C2 |
| ИСПОЛНИТЕЛЬНОЕ И СЧИТЫВАЮЩЕЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2018 |
|
RU2753750C2 |
| УСТРОЙСТВО АКТУАТОРА НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2723889C2 |
| ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПРЕОБРАЗОВАНИЯ ЭЛЕКТРИЧЕСКОГО И/ИЛИ РАДИАЦИОННОГО СИГНАЛА В ПЕРЕМЕЩЕНИЕ ИЛИ НАОБОРОТ | 2016 |
|
RU2727067C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО МАТЕРИАЛА | 2018 |
|
RU2762347C2 |
| ПРИВОД НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО МАТЕРИАЛА И СПОСОБ ВОЗБУЖДЕНИЯ | 2018 |
|
RU2766272C2 |
| ПЕРЕКЛЮЧАТЕЛЬ НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ИЛИ ФОТОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2716841C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО, ВКЛЮЧАЮЩЕЕ В СЕБЯ ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА, И СПОСОБ ВОЗБУЖДЕНИЯ | 2018 |
|
RU2764083C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ НЕГО | 2017 |
|
RU2750855C2 |
Изобретение относится к сенсорным устройствам, которые используют электроактивные материалы, и к способам считывания с использованием таких устройств. Техническим результатом является обеспечение решеткой пассивной матрицы сенсорного устройства идентификации уникальных комбинаций активных элементов. Сенсорное устройство содержит решетку пассивной матрицы электроактивных сенсорных элементов, расположенных в строках и столбцах. В одном примере, каждый сенсорный элемент генерирует двоичный сенсорный сигнал, так что общий сигнал в каждой строке и в каждом столбце позволяет определить любую комбинацию внешних вводов. Это обеспечивает первый способ определения комбинации сенсорных элементов, которые считывают ввод с использованием схемы адресации пассивной матрицы. В другом примере, каждый сенсорный элемент генерирует сенсорный сигнал с отличающейся частотной характеристикой. Это обеспечивает другой способ определения любой комбинации внешних вводов. 4 н. и 11 з.п. ф-лы, 18 ил.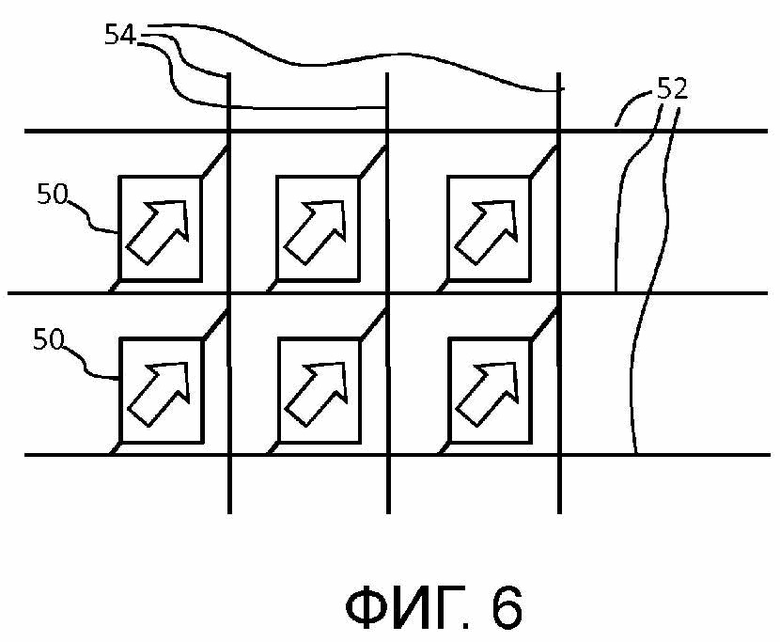
1. Сенсорное устройство, содержащее:
решетку пассивной матрицы электроактивных сенсорных элементов (50), расположенных в строках и столбцах; и
решетку линий (52) строк и решетку линий (54) столбцов с сенсорным элементом (50) в каждом пересечении, причем каждый сенсорный элемент генерирует сенсорный сигнал, когда считывается внешний ввод,
причем каждый сенсорный элемент (50) генерирует двоичный сенсорный сигнал, так что общий сигнал сенсорной решетки в каждой строке и в каждом столбце позволяет определить любую комбинацию внешних вводов.
2. Устройство по п. 1, в котором каждый сенсорный элемент (50) содержит бистабильный элемент, имеющий две конфигурации.
3. Устройство по п. 1 или 2, в котором каждый сенсорный элемент (50) генерирует сенсорный ток.
4. Сенсорное устройство, содержащее:
решетку пассивной матрицы электроактивных сенсорных элементов (60, 70), причем каждый сенсорный элемент генерирует сенсорный сигнал, когда считывается внешний ввод,
причем каждый сенсорный элемент генерирует сенсорный сигнал с отличающейся частотной характеристикой, так что отдельные сенсорные элементы могут быть идентифицированы из объединенного сенсорного сигнала, тем самым позволяя определять любую комбинацию внешних вводов.
5. Устройство по п. 4, в котором каждый сенсорный элемент содержит генерирующий ток элемент (62, 72), который генерирует выходной ток в ответ на внешний ввод, и цепь (80, 82) реактивной нагрузки, которая преобразует выходной ток в выходной сигнал с частотной характеристикой.
6. Устройство по п. 5, в котором цепь (80, 82) реактивной нагрузки содержит резонансный контур, причем резонансный контур каждого сенсорного элемента имеет отличающийся набор значений компонентов.
7. Устройство по п. 6, в котором резонансный контур (80, 82) содержит параллельный LC-контур.
8. Устройство по пп. 5, 6 или 7, в котором сенсорный элемент дополнительно содержит диод (84, 86) между генерирующим ток элементом и цепью нагрузки.
9. Устройство по любому одному из пп. 4-8, содержащее цепь (90, 92) суммирования для суммирования сенсорных сигналов.
10. Устройство по п. 4, в котором каждый сенсорный элемент (60, 70) имеет отличающуюся частоту механического резонанса или отличающееся время механической релаксации.
11. Способ считывания для считывания комбинации внешних вводов в сенсорное устройство, которое содержит решетку пассивной матрицы электроактивных сенсорных элементов (50), расположенных в строках и столбцах, и решетку линий (52) строк и решетку линий (54) столбцов с сенсорным элементом (50) в каждом пересечении, причем упомянутый способ содержит:
генерирование сенсорного сигнала в каждом сенсорном элементе, когда считывается внешний ввод, причем сигнал сенсорного элемента содержит двоичный сенсорный сигнал; и
из общего сенсорного сигнала в каждой строке и в каждом столбце определение комбинации внешних вводов.
12. Способ считывания для считывания комбинации внешних вводов в сенсорное устройство, которое содержит решетку пассивной матрицы электроактивных сенсорных элементов с сенсорным элементом (60, 70) в каждом пересечении, причем упомянутый способ содержит:
генерирование сенсорного сигнала в каждом сенсорном элементе с отличающейся частотной характеристикой; и
из объединенного сенсорного сигнала идентификацию отдельных сенсорных элементов, тем самым определяя комбинацию внешних вводов.
13. Способ по п. 12, в котором каждый сенсорный элемент содержит генерирующий ток элемент (62, 72), который генерирует выходной ток в ответ на внешний ввод, причем упомянутый способ содержит преобразование выходного тока в выходной сигнал с частотной характеристикой с использованием цепи (80, 82) нагрузки.
14. Способ по п. 12 или 13, содержащий суммирование сенсорных сигналов и идентификацию сенсорных элементов в суммированных сенсорных сигналах с использованием анализа частотного спектра.
15. Способ по п. 12, содержащий обеспечение каждого сенсорного элемента с отличающейся частотой механического резонанса или отличающимся временем механической релаксации.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| УСТРОЙСТВО ДЛЯ ВВОДА СИГНАЛОВ КОМАНДНОЙ МАТРИЦЫ | 2011 |
|
RU2487393C1 |
| ВОЗБУЖДАЕМАЯ КАСАНИЕМ СЕНСОРНАЯ КОНФИГУРАЦИЯ, ОБЪЕДИНЕННАЯ С ОРГАНИЧЕСКОЙ СВЕТОДИОДНОЙ СТРУКТУРОЙ | 2010 |
|
RU2515710C2 |

