Предлагаемое изобретение относится к измерительной преобразовательной технике, а именно к средствам измерения, а также может использоваться в различных областях производства и управления.
Известны устройства измерения периода сигнала, содержащие схемы формирования, кодировки и преобразования. Они формируют подсчет периода на основе отдельных генераторов, дешифраторов, логических схем или отдельных программно микропроцессорных устройств.
В них всегда содержится элемент опорной частоты, с которым сравнивается период принимаемого сигнала.
Однако, известные устройства обладают следующими недостатками. Они реализованы в виде микросхем, печатных плат, и т.п. изделий электроники. Они занимают место, имеют вероятность физического износа, и поломок. Промышленность выпускает много устройств измерения скорости вращения. Существует много способов преобразования информационного сигнала, выделения периода, статистической обработке и индикации. Стоимость контролирующих устройств, приближается к стоимости контролируемых объектов. Схемы контроля выполняет функции: получение команд обработки по заданному алгоритму измерения, формирование сигналов обработки, передача выделенной информации на индикатор. Это сложные функции требуют систем анализа команд, их дешифрации и преобразования. Для таких систем требуется отдельное аппаратное и программное сопряжение для передачи данных в компьютер. Такие устройства увеличивают стоимость систем контроля и уменьшают их надежность.
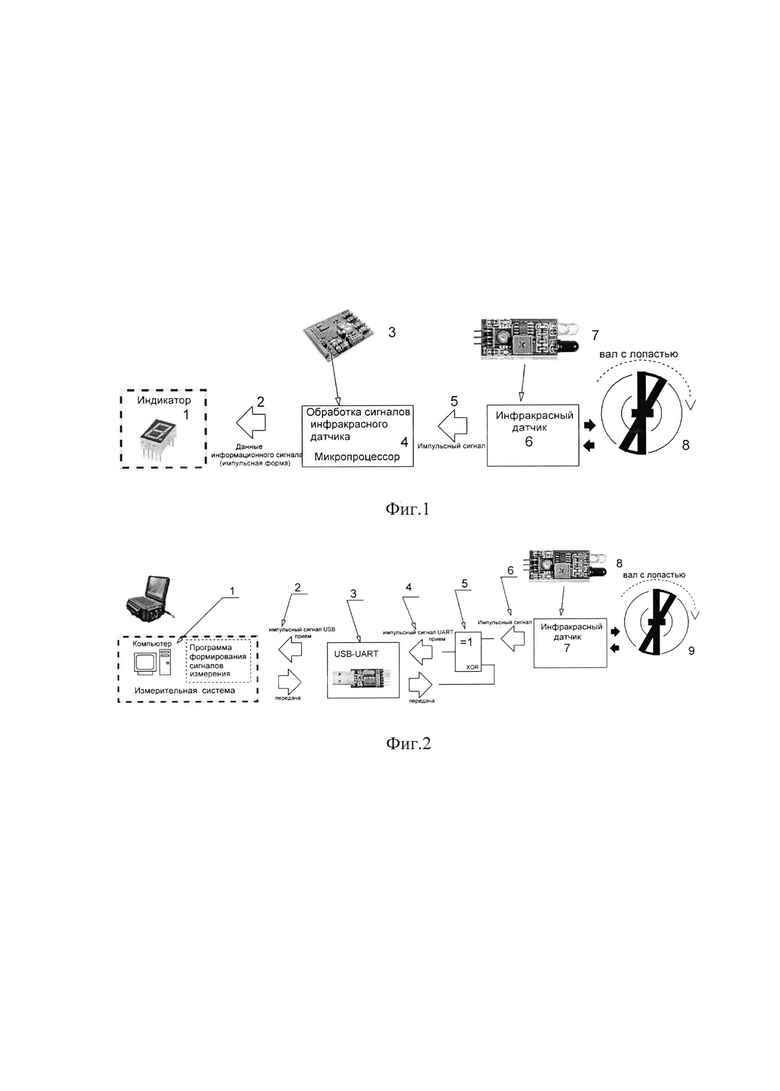
Из известных технических решений, наиболее близким по технической сущности к заявляемому методу (прототипом) является модуль тахометра на инфракрасном датчике [1] На фигуре 1 представлена блок-схема прототипа. Она состоит из индикатора скорости вращения 1, линии цифровой связи 2, печатной платы обработки сигналов 3, на которой расположены микропроцессор 4. Это система получает цифровые данные 5 от инфракрасного датчика 6 на печатной плате 7, который следит за вращением вала 8 с лопастью.
В предлагаемом методе исключается обработка отдельным микропроцессором и отдельным индикатором с последующей передачей данных в компьютер, а все процессы обработки производятся в стандартном персональном компьютере. Используются стандартные интерфейсы USB [2], UART [5], датчики вращения [3] и тем самым создается система измерения и одновременно система интеллектуальной обработки данных измерений, уменьшается стоимость и увеличивается надежность.
На фигуре 2 приведена функциональная схема заявляемого метода. Она состоит из измерительной системы 1, линии цифровой связи 2 USB стандарта, стандартного преобразователя 3 интерфейса USB в UART, который подключен 4 на передачу и прием к логическому блоку 5 «исключающее ИЛИ». На другой вход блока 5 «исключающего ИЛИ» поступают импульсные сигналы 6 от инфракрасного датчик 7, выполненного на печатной плате 8, который считывает данные оборотов вала 9 лопастью.
Целью заявленного метода является снижение стоимости систем измерения и управления, увеличение надежности изделий путем устранения промежуточных микропроцессорных изделий.
Поставленная цель достигается тем, что функцию обработки данных с информацией вращения лопасти выполняет измерительная система.
Для измерения скорости вращения требуется фиксировать количество оборотов за фиксированный интервал времени. Например - в одну секунду.
Схема инфракрасного датчика фиксирует перемещение лопасти. Лопасть отражает фотопоток, датчик регистрирует это своим выходным напряжением. Есть фотопоток - напряжение на выходе высокое, нет фотопотока - напряжение низкое.
Для получения фиксированного интервала времени с учетом перемещения лопасти используется передача блока известных байтов (0xFF) и прием этого же блока байтов, но с модуляцией через логический элемент типа «исключающее ИЛИ» от инфракрасного датчика.
Свойство логической функции «исключающее ИЛИ» выделять «разностный» код формирует на приеме тот же блок, но байты, которые попадают в интервал с фотопотоком, инвертируются (0x00).
Таким образом, принимаемый блок содержит информацию о количестве пересечений. Время измерения определяется умножением количества байт в блоке на скорость передачи байт.
Блок передается на «машинном уровне» компьютера, не прерывается другими подпрограммами USB интерфейса, и поэтому он точный по времени. Между блоками временной интервал может быть различный.
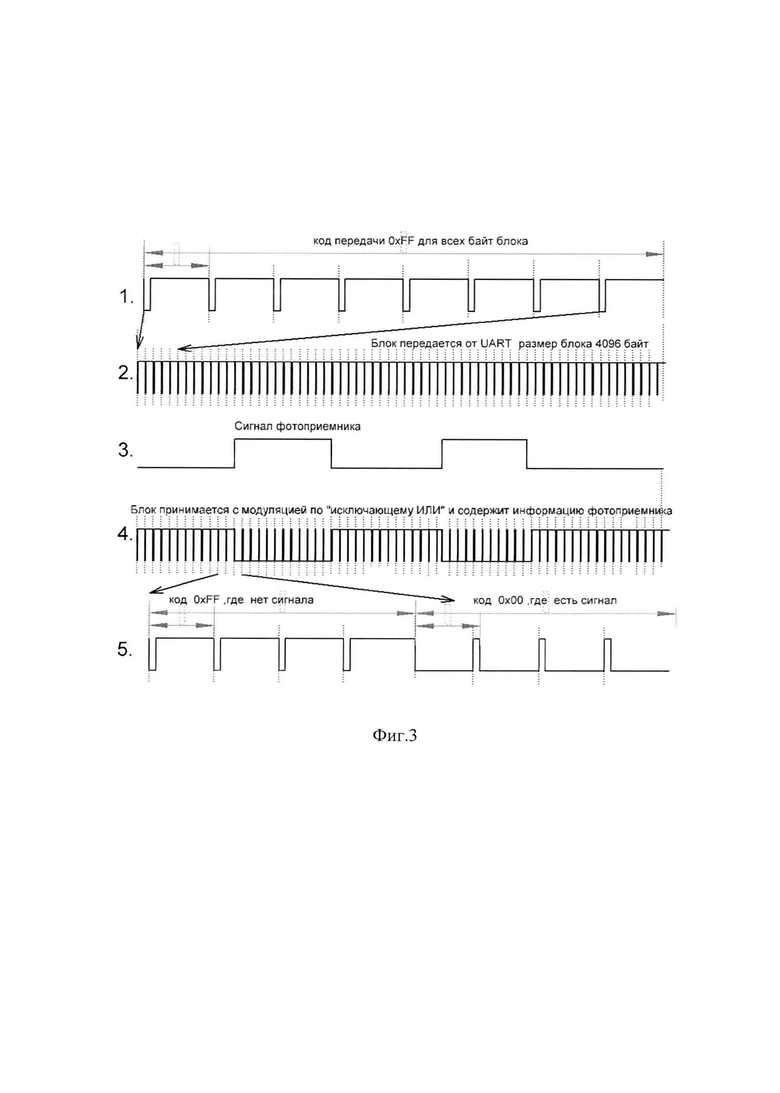
На фигуре 3 представлены диаграммы сигналов на входе и выходе «исключающее ИЛИ» при приеме данных пересечений фотопотока фотоприемником.
Сигнал 1 и 2 диаграммы - это передаваемый блок на фигуре 2 присутствует в точке 4 передачи.
Сигнал 3 диаграммы - принимаемый импульсный сигнал от фотоприемника присутствует на фигуре 2 в точке 6 приема.
Сигнал 4 и 5 - сигнал с модуляцией по «исключающее ИЛИ» присутствует на фигуре 2 в точке 4 приема.
Сигналы 1, 2 и 4, 5 одинаковые и даны в разных масштабах для уточнения метода преобразования. Стрелками указано место увеличенного масштаба отображения.
На диаграмме не приводятся краевые искажения отклонения начала сигнала фотоприемника и передаваемого блока. Это один байт в интервале от 0…до 0xFE, и можно его считать как начало или окончание сигнала фотодатчика. Этот байт учитывается программно измерительной системой [4].
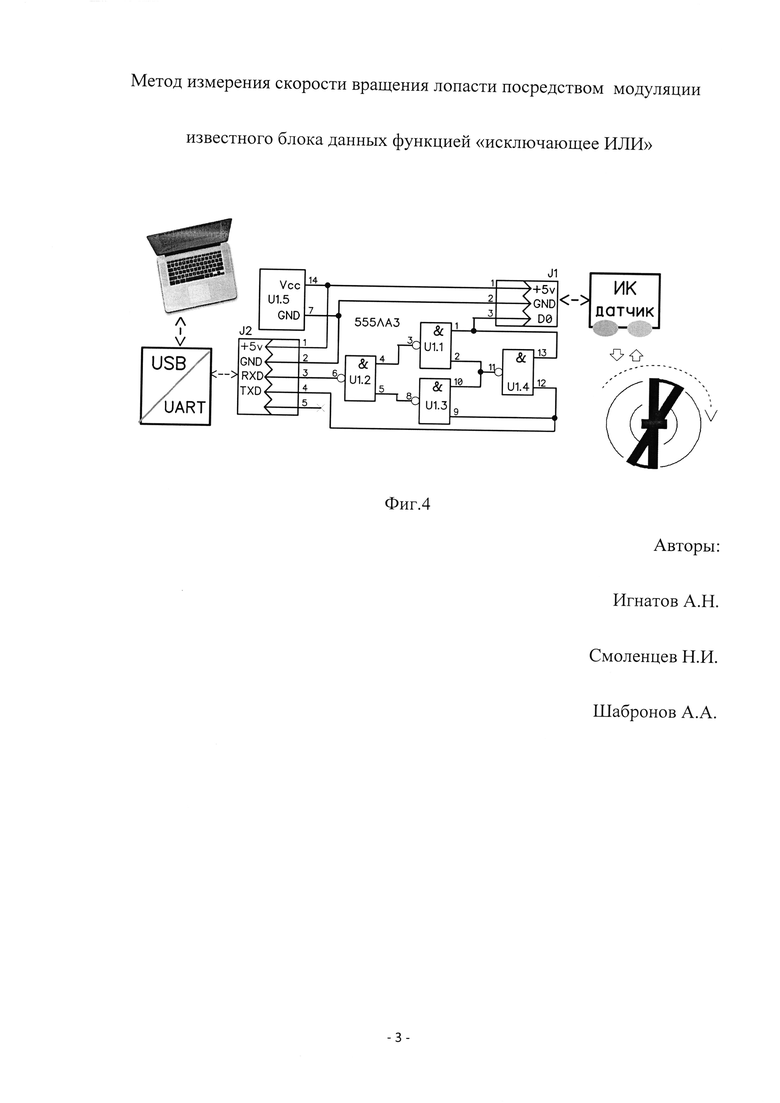
На фигуре 4 представлена принципиальная схема соединения блока UART с фотодатчиком с использованием микросхемы 555ла3.
Для формирования функции «исключающее ИЛИ» применена распространенная микросхема 555ла3 с 4-мя элементами 2И-НЕ. Функцию «исключающее ИЛИ» формирует включение всех ее элементов. Вполне возможно использовать и микросхему 555лп5, которая содержит четыре элемента «И-ИЛИ». В этом случае задействуется один и не используется три элемента.
Питание всех компонентов выполняет шина USB компьютера. Потребляемый ток не более 100 миллиампер.
Для используемого типа USB-UART [5] максимально возможный блок передачи-приема составляет 1 кбайт (4096 байт). Для скорости 100 кбит в секунду время измерения составит около 0.4 секунды. При разделении фотопотока по 3…4 байта, получаем максимальное число возможного учета, а именно: 4096/(4+4)=512 пересечений.
В данном примерном расчете суммирование в 2-а раза означает, что 3…4 байта фотопоток проходит, а следующие 3…4 байта нет, т.е. это период пересечения. Абсолютная ошибка составляет один байт. В процентах это 1/4096(*100%)=0,02%.
Оценим предельные параметры измерения для мотора, который рассчитан на максимальную работу до 12000 оборотов в минуту. Следовательно, выполняет в секунду 12000/60=200 оборотов. За 0.5 секунды это 100 оборотов. Таким образом, предел измерения на данной скорости передачи и размере блока превышает возможный предел для мотора более, чем в 5 раз.
Приведенный пример расчета показывает, что точность измерения можно определить математически.
Точность измерения и пределы измерения можно поднять, если увеличить количество байт в блоке и увеличить скорость передачи. Оценить данный метод измерения можно путем сравнения с аналогичными приборами и тахометрами.
В приведенной далее программе [4], для увеличения точности измерений, используются метод накопления среднего значения и расчет дисперсии среднего значения.
Программное обеспечение, измеряющее количество оборотов по данному методу приведено в [4]. Программа поставляется с открытым исходным кодом и может быть реализована на любых языках программирования и операционных системах и показывает принцип формирования измерительного сигнала и метод анализа.
Источники информации
1. ИК датчик в счетчике оборотов двигателя (прототип): https://mysku.ru/blog/aliexpress/55718.html
2. Интерфейсы UART: https://musbench.com/e_digital/uart.html
3. Инфрокрасный датчик. https://ru.aliexpress.com/store/product/1PC-Infrared-Barrie-Obstacle-Avoidance-Sensor-Module-For-Arduino-Smart-Car-Robot-Working-Voltage-3-3V/1939933_32818457434.html
4. Программа, архив схем, текст программы и компилятора языка программирования http://shabronov_s2.dyn-dns.ru/temp/uart_ik_tahometr_v1/test/tahometr_ot_uarta_v1.zip
5. Адаптеры UART https://ru.aliexpress.com/price/usb-uart-adapter_price.html
| название | год | авторы | номер документа |
|---|---|---|---|
| Метод приема синхронных данных старт-стопным интерфейсом | 2020 |
|
RU2733923C1 |
| Способ тестирования микросхем энергонезависимой памяти и устройство для его осуществления | 2023 |
|
RU2821349C1 |
| УСТРОЙСТВО ЗАРЯДА АККУМУЛЯТОРА | 2021 |
|
RU2773229C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ НАРУЖНОГО ВОЗДУХА | 2016 |
|
RU2661544C2 |
| СПОСОБ ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ НАРУЖНОГО ВОЗДУХА | 2016 |
|
RU2661459C2 |
| КОНТРОЛЛЕР УПРАВЛЕНИЯ И МОНИТОРИНГА | 2018 |
|
RU2699064C1 |
| Способ потактового управления несколькими шаговыми двигателями с помощью персонального компьютера по каналу USB и устройство для его осуществления | 2018 |
|
RU2704486C1 |
| МЕТОД ФОРМИРОВАНИЯ СИГНАЛОВ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ ПОСТОЯННОГО ТОКА | 2015 |
|
RU2665671C2 |
| СТЕНД МОДЕЛИРОВАНИЯ ПОВЕДЕНИЯ ДИНАМИЧЕСКИХ СИСТЕМ С ОБРАТНОЙ СВЯЗЬЮ НА ПРИМЕРЕ СИСТЕМЫ ОДНООСНОЙ СТАБИЛИЗАЦИИ И ОРИЕНТАЦИИ СПУТНИКА | 2023 |
|
RU2829476C1 |
| Беспроводной контроллер датчиков | 2018 |
|
RU2701103C1 |
Изобретение относится к измерительной преобразовательной технике, а именно к средствам измерения, а также может использоваться в различных областях производства и управления. Технический результат - увеличение надежности изделий путем устранения сложных отдельных микропроцессорных изделий, который обеспечивается тем, что все процессы обработки производятся в стандартном персональном компьютере. Используются стандартные интерфейсы USB, UART, датчики вращения и тем самым создается система измерения и одновременно система интеллектуальной обработки данных измерений. 4 ил.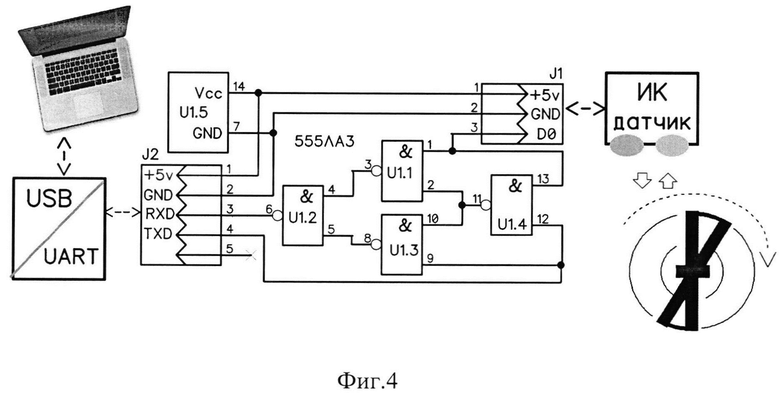
Метод измерения скорости вращения лопасти посредством модуляции известного блока данных функцией «исключающее или», включающий управляющую систему на основе универсального компьютера, цифровой канал связи с блочной байтовой старт-стопной организацией передачи данных, схему сопряжения с логической функцией «исключающее или» и оптическим датчиком, отличающийся тем, что расчет скорости вращения осуществляется в самом управляющем компьютере по принимаемому блоку данных с байтовой старт-стопной структурой, а передаваемый известный блок данных с известным временем передачи передается по каналу связи на логический элемент с функций «исключающее или», непосредственно модулируется импульсным сигналом, содержащим информацию о скорости вращения, и сразу же возвращается как принимаемый блок, при этом принимаемый блок данных уже модулирован и содержит информацию о скорости вращения с точной привязкой по времени к известному передаваемому блоку.
| Способ цифрового измерения частоты вращения двигателя | 1988 |
|
SU1585765A1 |
| Фотоэлектрический датчик скорости вращения | 1982 |
|
SU1081543A1 |
| EA 201170856 A1, 30.01.2012. | |||

