Предлагаемое изобретение относится к силовой преобразовательной технике, а именно к управляемым электромоторам постоянного тока, а так же может использоваться в различных областях производства.
Известны устройства формирования сигналов ШИМ (широтно-импульсной модуляции), содержащие схемы формирования, кодировки и силовые элементы. Они формируют сигналы на основе отдельных генераторов, дешифраторов, логических схем или отдельных программно микропроцессорных устройств. Выходные сигналы, передаваемые на двигатель постоянного тока, всегда имеют цифровой формат - сигнал 0 и сигнал 1. Термин «ШИМ» определяет вид сигналов управления - импульсный.
Однако, известные устройства обладают следующими недостатками. Они реализованы в виде микросхем, печатных плат, и т.п. изделий электроники. Они занимают место, имеют вероятность физического износа, и поломок, Промышленность выпускает много устройств управления двигателями постоянного тока. Стоимость управляющих устройств, приближается к стоимости двигателей. Схема управления выполняет функции: получение команд от программы верхнего уровня, формирование требуемой формы ШИМ-сигнала, передача через электронный ключ импульсного сигнала на двигатель. Это сложные функции требуют систем анализа команд, их дешифрации и преобразования. Такие устройства увеличивают стоимость систем управления и уменьшают их надежность.
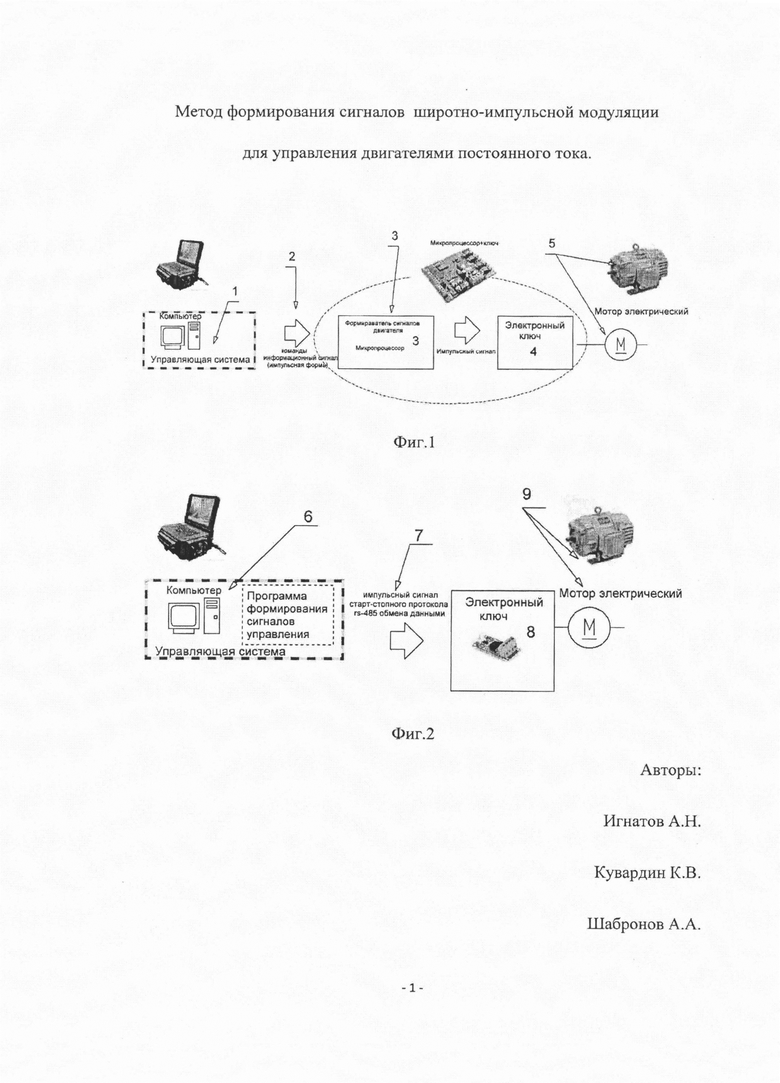
Из известных технических решений, наиболее близким по технической сущности к заявляемому методу (прототипом) является модуль и устройство управления на ШИМ [Л1] На фигуре 1 представлена блок-схема прототипа. Она состоит из управляющей системы 1, линии цифровой связи 2, печатной платы формирователя сигналов 3, на которой расположены микропроцессор и электронный ключ 4. Это система управляет мотором 5.
В предлагаемом методе исключается микропроцессор, тем самым уменьшается стоимость и увеличивается надежность.
На фигуре 2 приведена функциональная схема заявляемого метода. Она состоит из управляющей системы 6, линии цифровой связи 7 по старт-стопному протоколу rs-485 обмена данными, и силового ключа 8 со схемой сопряжения с сигналами шины данных rs-485. Эта система управляет мотором 9.
Целью заявленного метода является снижение стоимости систем управления, увеличение надежности изделий путем устранения сложных микропроцессорных изделий.
Поставленная цель достигается тем, что функции формирования сигналов для мотора выполняет управляющая система. Поскольку для электронного ключа требуется импульсный сигнал, то схема передачи сигналов реализуется в стандартном старт-стопном цифровом промышленном интерфейсе протокола rs-485 [Л3], [Л4].
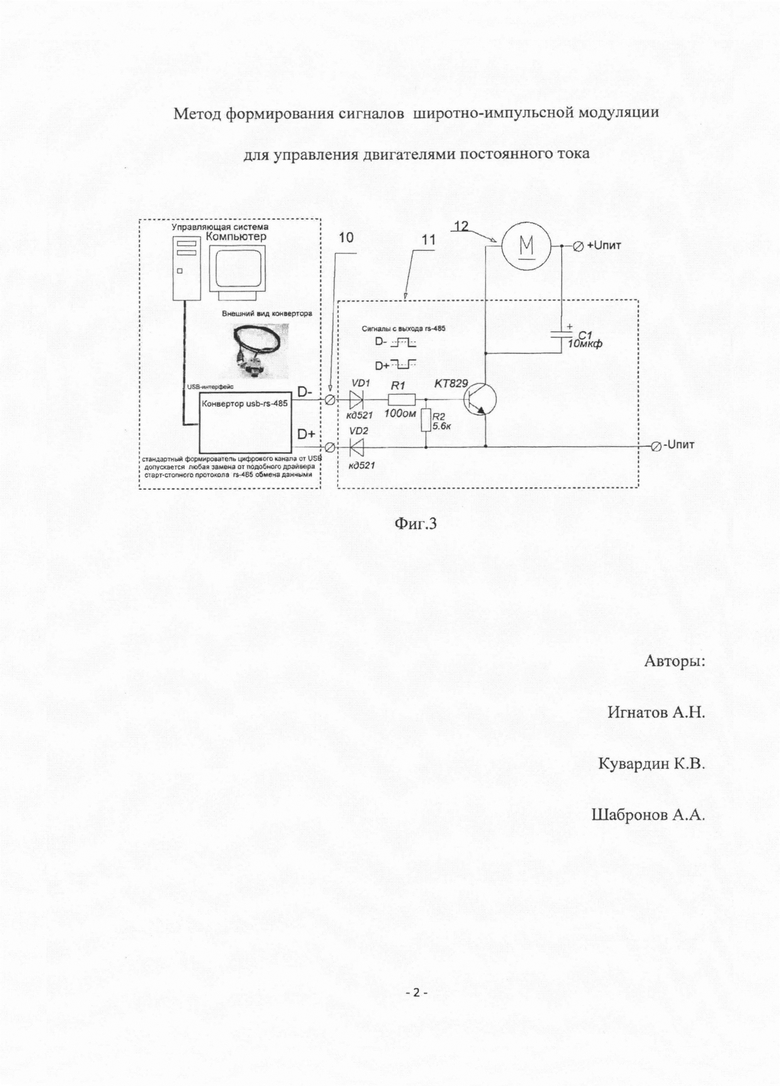
На фигуре 3 приведена схема сопряжения электронного ключа с цифровым интерфейсом 10 протокола rs-485. Схема 11 выделена штриховой линией и состоит из диодов VD1 VD2, разделяющих положительный и отрицательный сигнал импульса для управления электронным ключом КТ829. Ключ открывается от положительной части импульса. Сопротивления R1 и R2 создают требуемый ток, для открытия электронного ключа при положительной части импульса, и режим закрытия ключа при отрицательной части импульса. Электронный ключ управляет мотором постоянного тока 12.
Электронный ключ выполнен на транзисторе типа КТ829. Конденсатора C1 сглаживает импульсные пульсации электронного ключа на двигателе постоянного тока. Напряжение питание зависит от типа двигателя и возможностей транзистора и в приведенной схеме возможно до 45…100 вольт в зависимости от типа электронного ключа.
Цифровой канал старт-стопного протокола rs-485 сформирован на схеме конвертором usb-rs-485. Допускается любой другой существующий интерфейс компьютера, который формирует цифровой канал старт-стопного протокола rs-485.
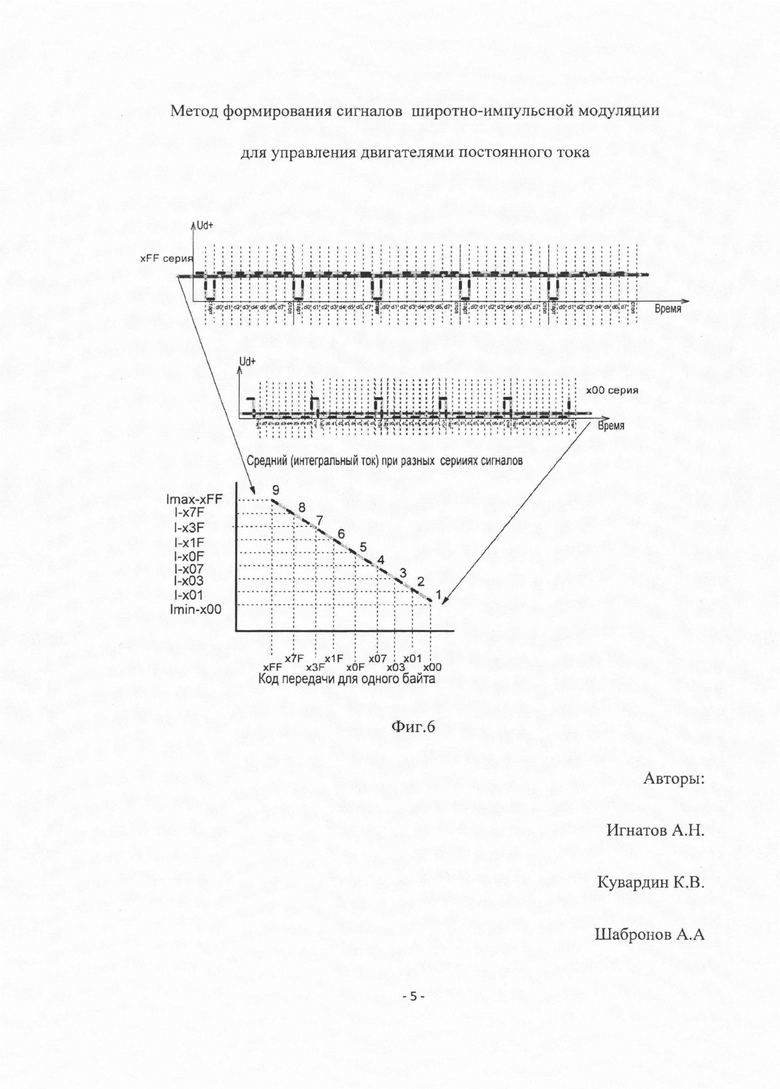
Для формирования сигнала ШИМ на двигатель постоянного тока, в минимальном варианте, можно передавать коды сигналов х00 до xFF (0000-0000 и 1111-1111 в битовой записи). Минимальный ансамбль 1-го байта сигнала ШИМ состоит из 9 сигналов x00, х01, x03, х07, x0F, x1F, x3F, x7F, xFF.
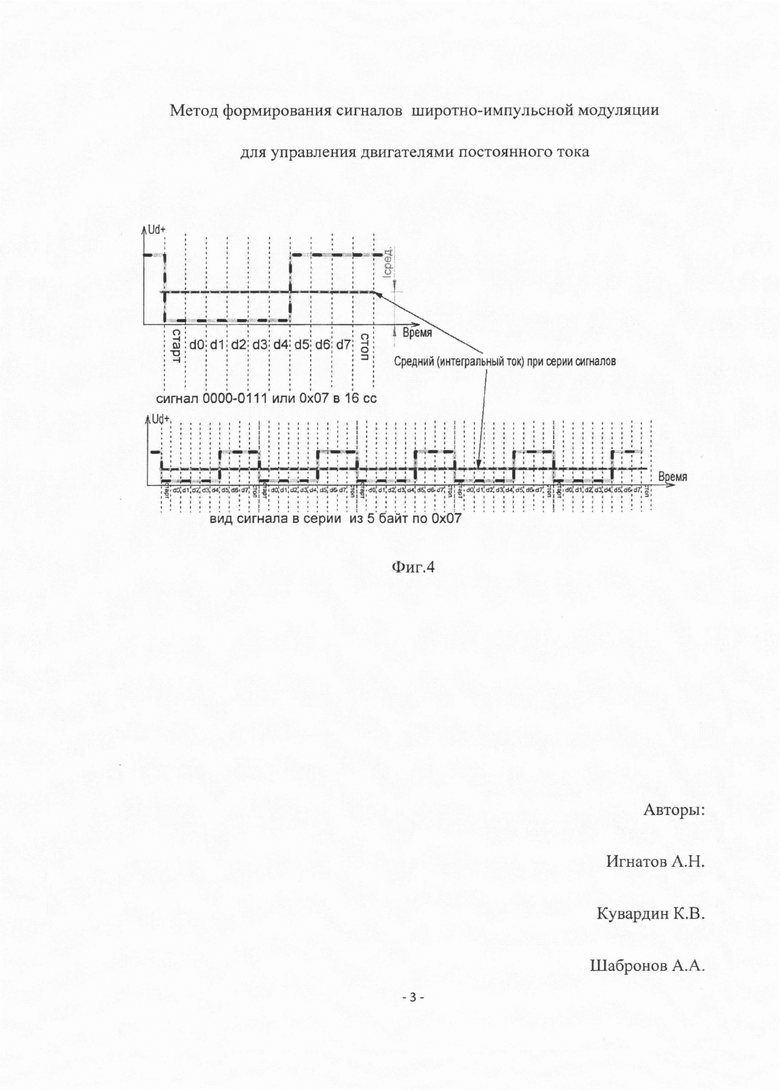
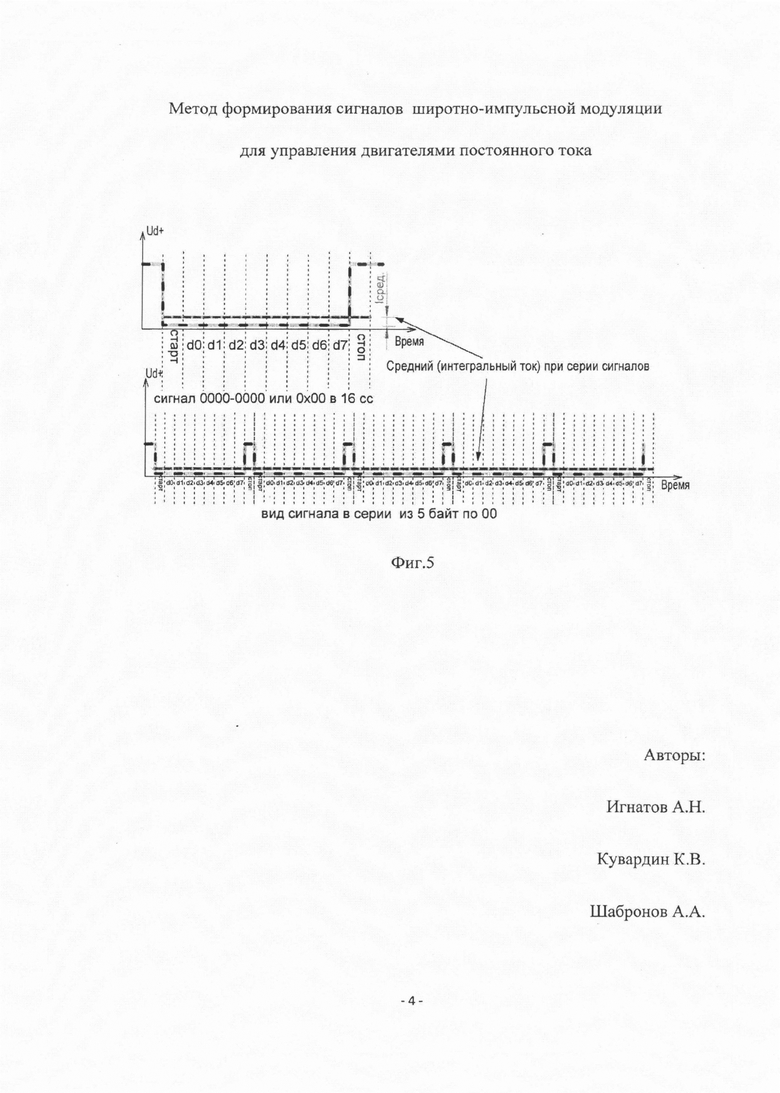
На фигуре 4 приведена диаграмма последовательности 5 байт кода х07 и на фигуре 5 представлена диаграмма аналогичной последовательности, 5 байт кода x00.
Цифровой старт-стопный сигнал формируется со стартового интервала всегда начинающегося с уровня логического 0. Далее формируется 8 интервалов, в каждом или 0 или 1 в зависимости от передаваемой информации. Заканчивается информационный участок стоповым интервалом, всегда сигналом логической 1.
На фигуре 4 и 5 отображается по оси Х-время, по оси Y - напряжение на выходной шине относительно общей шины питания. Средний ток определяется, как средний ток в выходной шине. Средний ток на фигурах 4 и 5 выделен утолщенной линией и указан его уровень.
Очевидно, что средний (интегральный) ток на нагрузке при последовательности всех x00 будет минимальный. И максимальный ток, можно сформировать при передаче последовательности сигналов xFF. Промежуточные токи формируют сигналы имеющегося ансамбля для одного байта.
На фигуре 6 представлены варианты сигнала ШИМ одного байта. Подсчет возможного количества значений тока проводим по тактовым интервалам. Период состоит из 8 бит, 1-го стартового интервала и 1-го стопового интервала. Всего 10. Время передачи сигнала может меняться от 1-го тактового интервала - это стартовый интервал и передача кода x00. До 9 - передается код xFF. Отношение сигнала к периоду (коэффициент скважности) варьируется от 1/ 10 и до 9/ 10. Итого 9 значений выходного тока для установки скоростей двигателей постоянного тока.
Для увеличения точности необходимо сформировать такой ансамбль сигналов, что бы средний (интегральный) ток был уникальный, т.е. сингулярный.  от лат. singularis - единственный, особенный, сингулярность в философии (от лат. singularis - единственный) - единичность существа, события, явления.
от лат. singularis - единственный, особенный, сингулярность в философии (от лат. singularis - единственный) - единичность существа, события, явления.
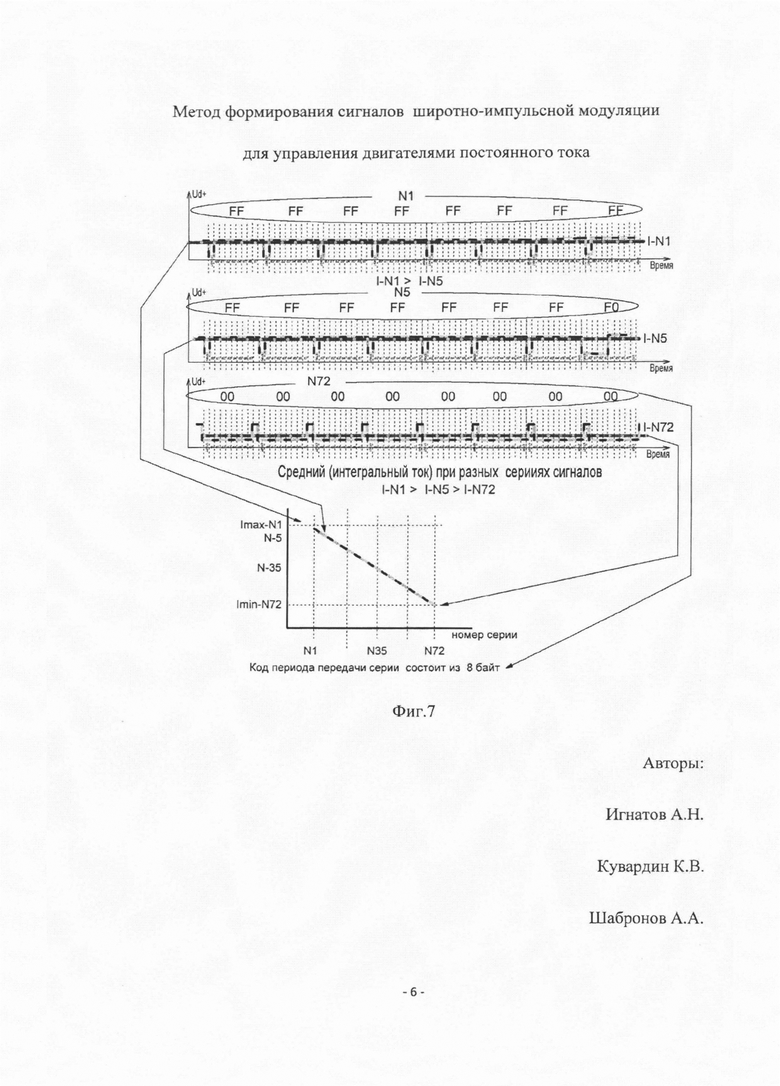
Рассмотрим формирование среднего тока для серии сигналов из 8 байт. Период, для учета среднего тока состоит из 8 байт, это 10*8 тактовых интервалов. Получается, что градация скважности меняется от 8 /80 до 72/80 на интервале в 8 байт.
На фигуре 7 показана градация токов для серии из 8 байт. Использование серии из 8 байт увеличивает градацию среднего (интегрального) тока до 8*9=72 ступеней. Использование 80 байт в серии увеличивает градацию до 80*9=720 ступеней. Таким образом, увеличивая количество байт в серии, точность формирования ШИМ сигнала можно повысить до любой заданной разумной величины.
Для формирования требуемых скоростей вращения двигателя, предполагается использование компьютеров с операционной системой Windows и передачи по старт-стопному каналу rs-485 блоков данных. Предварительно программа блоки данных формирует в файлы. В управляющем режима, программа передает файлы данных в старт-стопный канал rs-485 и двигатель вращается с требуемой скоростью. Передача определенных файлов данных означает вращение двигателя постоянного тока с определенной скоростью и отсутствие передачи - останавливает вращение.
Программное обеспечение, тестирующее управление двигателя постоянного тока по данному методу приведено в [Л5]. Программа поставляется с открытым исходным кодом и может быть реализована на любых языках программирования и операционных системах и показывает принцип формирования управляющего сигнала. Электронный ключ зависим от используемых двигателей и расчет подобных электронных ключей приведен в [Л6].
Источники информации
1. Модуль управления двигателем постоянного тока (прототип) URL: http://ellab.su/catatog/bukd/bukdpt/
2. Модули управления двигателями URL: http://electrum-av.com/ru/silovye-moduli-so-vstroennym-upr/moduli-upravleniya-dvigatelvami.html
3. Описание стандарта rs-485: http://ru.wikipedia.org/wiki/RS-485
4. Интерфейсы rs-485: http.b://www ookasutp.ru/Chapter2_3.aspx
5. Описание программы управления двигателем постоянного тока http://www.shabronov.narod.ru/temp/tenis_bam_v2/
6. Расчет транзисторных ключей: http://life-prog.ru/1_40865_raschet-tranzistornih-klyuchey.html
7. Обоснование использования rs-485 с пояснением на замечания эксперта: http:/shabronov_s2.dyn-dns.ru/temp/dp1_pat_uvedomlenie_sh/
| название | год | авторы | номер документа |
|---|---|---|---|
| Метод приема синхронных данных старт-стопным интерфейсом | 2020 |
|
RU2733923C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ КОТЕЛЬНОЙ | 2017 |
|
RU2656670C1 |
| Способ потактового управления несколькими шаговыми двигателями с помощью персонального компьютера по каналу USB и устройство для его осуществления | 2018 |
|
RU2704486C1 |
| Метод измерения скорости вращения лопасти посредством модуляции известного блока данных функцией "исключающее ИЛИ" | 2019 |
|
RU2714500C1 |
| Микроконтроллер регулировки расхода охлаждающей жидкости солнечной энергетической установки | 2023 |
|
RU2810876C1 |
| ЭЛЕКТРОННЫЙ БЛОК УПРАВЛЕНИЯ ЭНЕРГОПИТАНИЕМ ЭЛЕКТРОЛИЗЁРОВ | 2022 |
|
RU2791286C1 |
| Способ имитационной поверки средств измерения и комплекс для его осуществления | 2024 |
|
RU2838347C1 |
| СПОСОБ МОНИТОРИНГА ТЕМПЕРАТУРЫ ОБМОТКИ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2718597C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЭКСКАВАТОРА | 2001 |
|
RU2193630C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛОВОЙ ИНФОРМАЦИИ | 2016 |
|
RU2652467C1 |
Изобретение относится к силовой преобразовательной технике, а именно к управляемым электромоторам постоянного тока. Метод формирования сигналов широтно-импульсной модуляции для управления двигателями постоянного тока, включающий управляющую систему на основе универсального компьютера, цифровой канал связи по протоколу старт-стопного интерфейса rs-485, схему сопряжения цифрового старт-стопного канала связи rs-485 с электронным силовым ключом и управляемый двигатель постоянного тока, при этом формирование импульсного сигнала для управления двигателем постоянного тока осуществляется в самом управляющем компьютере, а импульсный сигнал управления передается по каналу связи со старт-стопным протоколом передачи данных rs-485, на электронный силовой ключ, причем импульсные старт-стопные блоки передаваемого сигнала разбиваются на периоды управляющего воздействия, в которых программным способом формируется серия из определенного количества байт старт-стопного интерфейсного протокола сигналов, составляющий в интегральном уровне значение требуемого тока, который задает скорость вращения двигателя постоянного тока. Технический результат – упрощение конструкции устройства, повышение его надежности. 7 ил.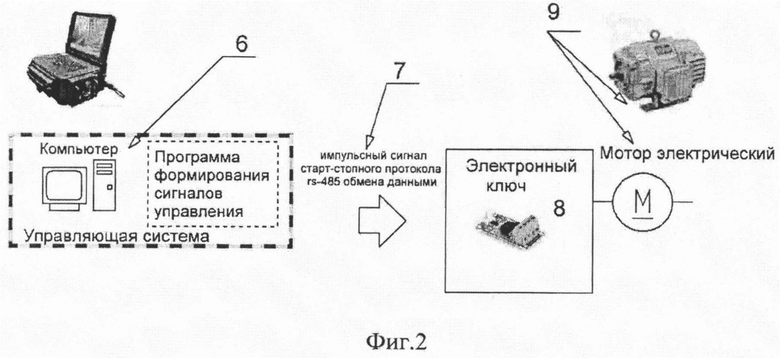
Метод формирования сигналов широтно-импульсной модуляции для управления двигателями постоянного тока, включающий управляющую систему на основе универсального компьютера, цифровой канал связи по протоколу старт-стопного интерфейса rs-485, схему сопряжения цифрового старт-стопного канала связи rs-485 с электронным силовым ключом и управляемый двигатель постоянного тока, отличающийся тем, что формирование импульсного сигнала для управления двигателем постоянного тока осуществляется в самом управляющем компьютере, а импульсный сигнал управления передается по каналу связи со старт-стопным протоколом передачи данных rs-485, на электронный силовой ключ, причем импульсные старт-стопные блоки передаваемого сигнала разбиваются на периоды управляющего воздействия, в которых программным способом формируется серия из определенного количества байт старт-стопного интерфейсного протокола сигналов, составляющий в интегральном уровне значение требуемого тока, который задает скорость вращения двигателя постоянного тока.
| US 8193748 B2, 05.06.2012 | |||
| US 20090115535 A1, 07.05.2009 | |||
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ ДЛЯ ВОЗБУЖДЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2008 |
|
RU2463699C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |

