Изобретение относится к регулируемому электроприводу и автоматике, может быть использовано для создания цифровых регуляторов скорости вращения, преимущественно ориентированных на микропроцессорную схемотехнику, для различных типов электроприводов.
1
. Цель изобретения - улучшение динамических характеристик регулятора
электропривода путем ускорения процесса измерения скорости вращения.
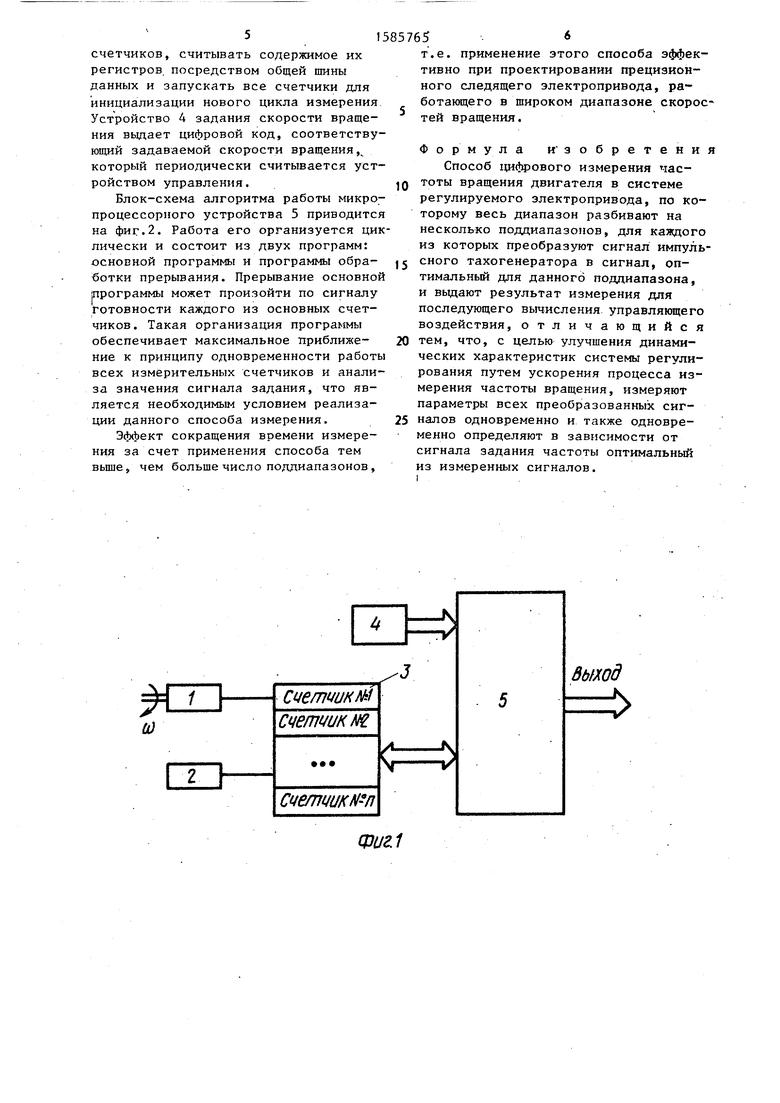
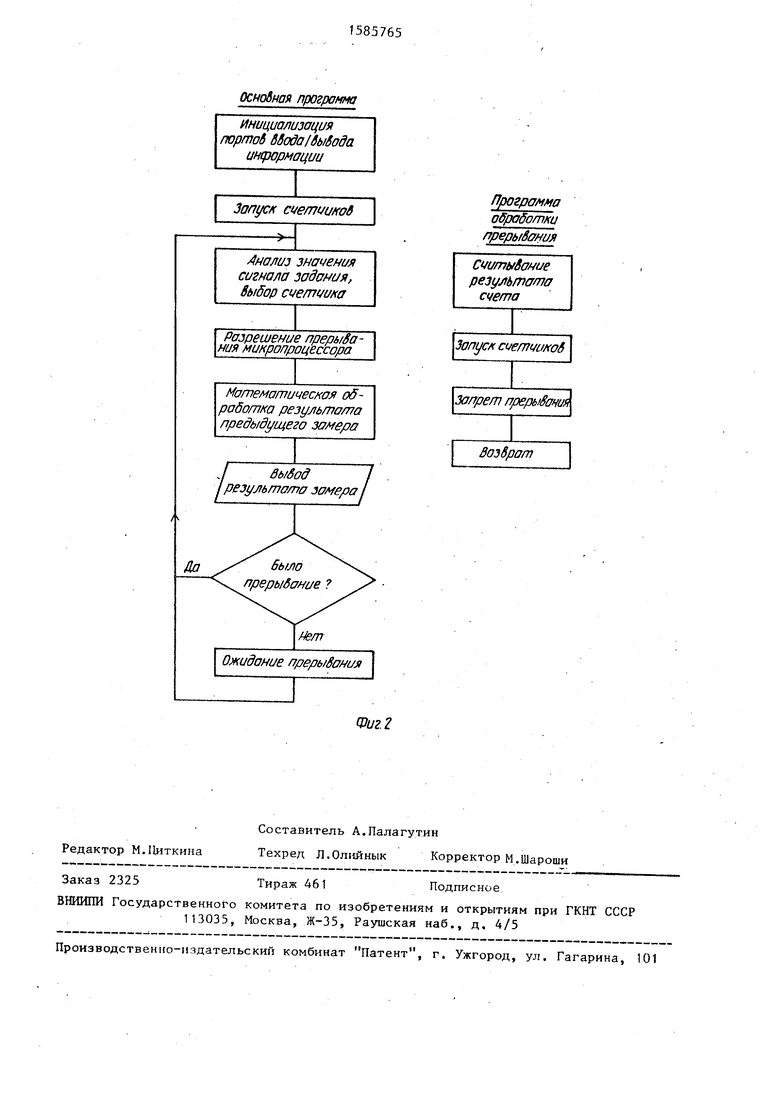
На фиг.1 представлена схема устройства, реализуюгдего предложенный способ; на фиг.2 - алгоритм работы устройства.
: Устройство содержит импульсный тахогенератор 1, установленный на валу объекта регулирования, кварцевый генератор 2, вырабатывающий импульсную последовательность стабильной частоты, блок счетчиков 3, число счетчиков в котором определяется количеством назначенных измерительны поддиапазонов, устройство 4 задания скорости вращения и схему 5 управления , формирующую выходную информацию о скорости вращения в цифровом коде для управляющего воздействия на регулятор электропривода.
Устройство работает следующим образом.
:л эо
:л
vj
35
:л
Разбиение всего диапазона скоростей вращения электропривода на ряд измерительных поддиапазонов позво - ляет в каждом конкретном поддиапазоне применять сообразно заданным точности регулирования, быстродействию и разрешающей способности импульсного тахогенератора (количество импульсов на один оборот вала) тот или иной конкретный параметр измерения. Это может быть подсчет импульсов тахогенератора за эталонный отрезок времени (удобно при высоких скоростях вращения, когда частота импульсов тахогенератора высокая) или подсчет импульсов высокой стабильной частоты за период следования импульсов тахогенератора (удобно при ннзкк скоростях вращения, когда частота импульсов тахогенера/гора низкая). Кроме того, на каждом измерительном поддиапазоне могут применяться различные вариации этих параметров (различные длительности эталонного отрезка .времени, деление частоты импульсов тахогенератора и т.п). Такое параметрическое варьирование дае возможность получить заданные точность и время измерения в широком диапазоне скоростей враР1ения. При этом точность, время измерения и ширина диапазона регулирования практически не ограничиваются и определяются выбранным количеством измерительных поддиапазонов и конкретными техническими характеристиками устройства, реализующего данный способ измерения. Измерение всех заранее установленных параметров (счет соответствующих импульсов) производят одновременно. При этом только один из всех этих параметров в действительности соответствует истинной скорости вращения и обеспечивает заданную точность. Для того чтобы сразу определить этот единственный для данной скорости параметр, проводят анализ значения скорости вращения, по величине которого определяют рабочи поддиапазон и соответствующий ему параметр, причем этот анализ производят одновременно со счетом импульсов, что не задерживает процесс измерения, чем данный способ выгодно отличается от прототипа.
В случае резких переходных процесов (скачок задания скорости) изме
5
0
5
0
5
0
5
0
5
рение осуществляется следующим образом.
При скачкообразном увеличении (уменьшении) задания скорости вращения происходит выбор нового измерительного поддиапазона, который вследствие инерционности объекта регулирования (электродвигателя) в первый момент не будет соответствовать истинной скорости вращения. В этот момент происходит измерение с меньшей точностью, и результат получается близким к минимальному (максимальному) , что обеспечивает максимальное воздействие на регулятор скорости и быстрое установление новой скорости вращения,
Входная информация поступает с выхода импульсного тахогенератора 1 на вход блока счетчиков 3 в виде импульсной последовательности, частота которой пропорциональна скорости вращения. Одновременно на этот же блок подается импульсная последовательность . стабильной частоты с выхода кварцевого генератора 2. В составе блока счетчиков 3 имеется, ряд основных счетчиков, выполняющих измерение параметров, зависяпшх от скорости вращения. Количество этих счетчиков определяется числом измерительных, поддиапазонов. Кроме того, в блоке 3 имеется несколько вспомогательных счетчиков (таймеров), осуществляющих функции даления частоты и формирова- ния эталонных интервалов времени. Все основные счетчики, производящие измерения, запускаются одновременно и каждый производит счет своего параметра. В зависимости от параметра вхо ды этих счетчиков подключаются либо непосредственно к выходам устройств 1 и 2, либо через вспомогательные счетчики. По окончании измерения счетчики останавливаются, сохраняя при этом в своих регистрах полученную информацию, и подают сигнал готовности устройству 5 управления. Устройство 5 может быть выполнено на одном из микропроцессорных наборов (например, серии К580) со стандартной архитектурой. Все связи микропроцессора с приведенными на фиг.1 элементами, являющимися для него устройствами ввода-вывода, также являются стандартными.
Устройство 5 имеет возможность адресоватьсяк любому из основных
счетчиков, считывать содержимое их регистров посредством общей шины данных и запускать все счетчики для инициализации нового цикла измерения. Устройство 4 задания скорости вращения выдает цифровой код, соответствующий задаваемой скорости вращения , который периодически считывается устройством управления.
Блок-схема алгоритма работы микропроцессорного устройства 5 приводится на фиг.2. Работа его организуется циклически и состоит из двух программ: основной программы и программы обра- ботки прерывания. Прерывание основной программы может произойти по сигналу готовности каждого из основных счетчиков . Такая организация программы обеспечивает максимальное приближе- ние к принципу одновременности работы всех измерительных счетчиков и анализа значения сигнала задания, что является необходимым условием реализации данного способа измерения.
Эффект сокращения времени измерения за счет применения способа тем выше, чем больше число поддиапазонов.
.
1585765
т.е. применение этого способа эффективно при проектировании прецизионного следящего электропривода, работающего в широком диапазоне скорос тей вращения.
Формула и зобретени
Способ цифрового измерения частоты вращения двигателя в системе регулируемого электропривода, по которому весь диапазон разбивают на несколько поддиапазонов, для каждого из которых преобразуют сигнал импульсного тахогенератора в сигнал, оптимальный для данного поддиапазона, и выдают результат измерения для последующего вычисления управляющего воздействия, отличающийся тем, что, с целью улучшения динамических характеристик системы регулирования путем ускорения процесса измерения частоты вращения, измеряют параметры всех преобразованных сигналов одновременно и также одновременно определяют в зависимости от сигнала задания частоты оптимальный из измеренных сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 2004 |
|
RU2280315C2 |
| Цифровой измеритель угловой скорости | 1990 |
|
SU1774265A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ МНОГОСЕКЦИОННЫХ АГРЕГАТОВ | 2008 |
|
RU2386740C1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| МИКРОПРОЦЕССОРНЫЙ ЭЛЕКТРОПРИВОД | 1998 |
|
RU2141164C1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ МНОГОСЕКЦИОННЫХ АГРЕГАТОВ | 2010 |
|
RU2456740C2 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Способ стабилизации толщины изоляции кабеля и устройство для его реализации | 1982 |
|
SU1302248A1 |
Изобретение относится к автоматике, касается регулируемого электропривода и может быть использовано для создания цифровых регуляторов частоты вращения, преимущественно ориентированных на микропроцессорную схемотехнику, для различных типов электроприводов. Цель изобретения - улучшение динамических характеристик регулятора электропривода за счет ускорения процесса измерения скорости вращения. Цель достигается тем, что весь диапазон скоростей вращения разбивают на ряд измерительных поддиапазонов, для каждого из которых преобразуют сигнал импульсного тахогенератора в сигнал, оптимальный для данного поддиапазона, измеряют параметры всех преобразованных сигналов одновременно и одновременно определяют в зависимости от сигнала задания скорости оптимальный из измеренных сигналов. 2 ил.
CiJe/77VU/ M1
c emtiUKNi
Счетцик1 Л
Bbfxod
Фиг.1
Оснобная программа
инициализация
портоб &6odafSbiBoda
ин1рормации
Запуск ci emt uffoe
Анализ значения сигнала задания, 8ы5ор ctjemvu/ a
Разрешение npepi,/Sa- ния минропроцессора
Математицеская обработка резумта/па предыдущего
.1 вь/6од
I резумта/по зол/е а
Ла
Ожидание прерыВашя
Программа
о юбоптки
лрерывония
CwmbfSaHtje pe3yjfbmama счета
Запуск ct/emviwoS
3anpem прерывания
Возврат
| Герман-Галкин С.Г | |||
| и др | |||
| Цифровые электроприводы с транзисторными преобразователями | |||
| Л.: Энергоатомиз- дат, 1986, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| IEEE Transactions on Injiustry Electronics, vol.iE-32, No.3, August 1985, pp.209-214. | |||
