Изобретение относится к радиотехнике и может быть использовано в системах радиомониторинга при решении задачи скрытного определения координат источников радиоизлучений (ИРИ), в частности для определения координат ИРИ с борта летательного аппарата (ЛА).
Известен способ определения местоположения пользовательского терминала с использованием двух спутников-ретрансляторов (CP) [1]. Указанный способ заключается в том, что на основе измерений временных задержек и частотных сдвигов между переданными и принятыми тестовыми сигналами системы, с учетом известных координат первого и второго спутников-ретрансляторов CP1, СР2, векторов их скоростей  координат узла межсетевого сопряжения (УМС) и предварительно заданных частот конвертирования
координат узла межсетевого сопряжения (УМС) и предварительно заданных частот конвертирования  рабочих частот CP1, СР2, вычисляют широту ϕПТ и долготу λПТ пользовательского терминала (ПТ).
рабочих частот CP1, СР2, вычисляют широту ϕПТ и долготу λПТ пользовательского терминала (ПТ).
Для реализации указанного известного способа выполняют следующие этапы:
определяют расстояние  между первым CP1 и ПТ;
между первым CP1 и ПТ;
определяют расстояние  между вторым СР2 и ПТ;
между вторым СР2 и ПТ;
измеряют модуль  азимут αПТ вектора скорости пользовательского терминала и его высоту hПТ относительно земной поверхности;
азимут αПТ вектора скорости пользовательского терминала и его высоту hПТ относительно земной поверхности;
вычисляют в УМС доплеровские сдвиги частот  и
и  первого и второго узкополосных тестовых сигналов, обусловленные радиальными скоростями ПТ относительно CP1 и СР2, для чего предварительно определяют вероятные местоположения ПТ с учетом известных координат CP1, СР2 и определенных параметров и ;
первого и второго узкополосных тестовых сигналов, обусловленные радиальными скоростями ПТ относительно CP1 и СР2, для чего предварительно определяют вероятные местоположения ПТ с учетом известных координат CP1, СР2 и определенных параметров и ;
определяют, по меньшей мере, один из параметров: радиальную скорость  перемещения первого CP1 относительно ПТ, и/или радиальную скорость
перемещения первого CP1 относительно ПТ, и/или радиальную скорость  перемещения второго СР2 относительно ПТ, с учетом доплеровских сдвигов частот и ;
перемещения второго СР2 относительно ПТ, с учетом доплеровских сдвигов частот и ;
вычисляют широту ϕПТ и долготу λПТ ПТ.
При таком способе обеспечивается высокая точность определения координат пользовательского терминала в широком диапазоне скоростей его перемещения за счет определения частотных сдвигов сигналов системы.
Недостатками аналога являются: длительное время определения координат ПТ, связанное с необходимостью проведения дополнительных измерений модуля, азимута вектора скорости ПТ и его высоты относительно земной поверхности; необходимость ответной передачи тестовых сигналов с ПТ, чьи координаты необходимо определить в УМС через СР.
Известен способ определения координат ИРИ с использованием летательного аппарата [2]. Указанный способ заключается в том, что:
выбирают 3-мерную декартову систему координат (ДСК) для производства измерений и расчетов;
размещают измеритель на ЛА;
перемещают указанный ЛА в пространстве;
принимают радиосигнал ИРИ в заданной полосе частот ΔF;
измеряют и запоминают первичные координатно-информативные параметры принятого радиосигнала, в качестве которых используют амплитуды напряженности электрического поля (АНЭП), создаваемее ИРИ в точках приема;
измеряют и запоминают вторичные параметры (ВП) - координаты местоположения ЛА;
многократно измеряют и запоминают совокупности АНЭП En (где n=1…N) и ВП - координаты ЛА в 3-х мерной ДСК xn, yn и zn в процессе перемещения ЛА;
вычисляют N-1 коэффициентов окружностей Апполония, как отношений АНЭП, перемноженных на обратные отношения высот ЛА в соответствующих точках измерения;
формируют N-1 сферических поверхностей положения (СПП) ИРИ путем построения и последующего вращения окружностей Апполония вокруг осей, соединяющих соответствующие фокусы;
в качестве координат ИРИ в пространстве принимают координаты точки пересечения N-1 указанных СПП ИРИ.
В указанном способе компенсируется ошибка определения координат ИРИ на плоскости на основе использования СПП ИРИ, формируемых вращением окружностей Апполония вокруг осей, соединяющих соответствующие фокусы.
Недостатком аналога являются длительное время определения координат ИРИ, связанное с необходимостью измерения N≥5 раз совокупности АНЭП и ВП в процессе перемещения ЛА.
Из известных способов наиболее близким аналогом (прототипом) предлагаемого способа по своей технической сущности является способ определения координат источника радиоизлучений с борта летательного аппарата [3] заключающийся в том, что: принимают радиосигналы триортогональной антенной системы (ТОАС), измеряют координаты центров и углы ориентации ТОАС в различные моменты времени, затем формируют вспомогательные плоскости положения ИРИ, определяют линии положения ИРИ как линии пересечения каждой из вспомогательных плоскостей положения ИРИ с поверхностью Земли и вычисляют координаты ИРИ в точке пересечения линий положения ИРИ.
Недостатком способа прототипа является относительно низкая точность определения координат ИРИ с борта летательного аппарата, обусловленная предположением, что ИРИ находится на поверхности Земли, причем в качестве поверхности Земли выступает плоскость.
Целью изобретения является разработка способа, обеспечивающего более высокую точность определения координат ИРИ при возможном нахождении его на некоторой высоте от поверхности Земли в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной АС.
Поставленная цель достигается тем, что в известном способе определения координат ИРИ с борта ЛА с использованием ТОАС, заключающемся в том, что выбирают декартову систему координат (ДСК) OЗXЗYЗZЗ для производства измерений и расчетов, размещают измерительную аппаратуру, оснащенную ТОАС, на летательном аппарате, который перемещают в пространстве, измеряют координаты центров ТОАС О1 и O2 и углы ориентации ТОАС в моменты времени t1 и t2, выбирают дополнительные ДСК O1X1Y1Z1 и O2X2Y2Z2 для производства измерений и расчетов с учетом координат центров ТОАС и углов ориентации ТОАС в моменты времени t1 и t2, измеряют в моменты времени t1 и t2 с помощью ТОАС ортогональные компоненты Ех1, Еу1, Ez1 и Ех2, Еу2, Ez2 векторов напряженности электрического поля  и
и  принятого аналогового радиосигнала, определяют ориентацию векторов напряженности электрического поля
принятого аналогового радиосигнала, определяют ориентацию векторов напряженности электрического поля  и
и  в ДСК O1X1Y1Z1 и O2X2Y2Z2 соответственно путем векторного сложения ортогональных компонент Ех1, Еу1, Ez1 и Ех2, Еу2, Ez2, строят вспомогательные плоскости ΩE1 и ΩE2, так, что бы они были перпендикулярны векторам
в ДСК O1X1Y1Z1 и O2X2Y2Z2 соответственно путем векторного сложения ортогональных компонент Ех1, Еу1, Ez1 и Ех2, Еу2, Ez2, строят вспомогательные плоскости ΩE1 и ΩE2, так, что бы они были перпендикулярны векторам  и
и  соответственно и проходили через начала координат О1 и O2, вычисляют координаты ИРИ с учетом вспомогательных плоскостей ΩE1 и ΩE2 в качестве ТОАС используют комбинированную триортогональную антенную систему (КТОАС), состоящую из трех антенных элементов (АЭ) в виде несимметричных вибраторов штыревого типа и трех рамочных АЭ.
соответственно и проходили через начала координат О1 и O2, вычисляют координаты ИРИ с учетом вспомогательных плоскостей ΩE1 и ΩE2 в качестве ТОАС используют комбинированную триортогональную антенную систему (КТОАС), состоящую из трех антенных элементов (АЭ) в виде несимметричных вибраторов штыревого типа и трех рамочных АЭ.
Дополнительно в моменты времени t1 и t2 измеряют с помощью трех рамочных АЭ ортогональные компоненты Hx1, Hy1, Hz1 и Hx2, Hy2, Hz2 векторов напряженностей магнитного поля  и
и  принятых аналоговых радиосигналов. Определяют ориентацию векторов и в ДСК O1X1Y1Z1 и O2X2Y2Z2 соответственно путем векторного сложения ортогональных компонент Hx1, Hy1, Hz1 и Hx2, Hy2, Hz2.
принятых аналоговых радиосигналов. Определяют ориентацию векторов и в ДСК O1X1Y1Z1 и O2X2Y2Z2 соответственно путем векторного сложения ортогональных компонент Hx1, Hy1, Hz1 и Hx2, Hy2, Hz2.
Строят вспомогательные плоскости ΩH1 и ΩH1 так, что бы они были перпендикулярны векторам  и
и  и проходили через начала координат O1 и O2. Строят линии положения ИРИ
и проходили через начала координат O1 и O2. Строят линии положения ИРИ  и
и  на пересечении вспомогательных плоскостей ΩE1, ΩH1 и ΩE2, ΩH2 соответственно.
на пересечении вспомогательных плоскостей ΩE1, ΩH1 и ΩE2, ΩH2 соответственно.
Вычисляют координаты ИРИ в точке пересечения линий положения ИРИ  и
и 
Благодаря указанной новой совокупности существенных признаков, в том числе за счет использования КТОАС, состоящей из трех АЭ в виде несимметричных вибраторов штыревого типа и трех рамочных АЭ, достигается цель изобретения: повышение точности определения координат ИРИ в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной АС. Повышение точности определения координат ИРИ объясняется устранением погрешности, связанной с определением высоты ИРИ над поверхностью Земли, которая в способе прототипе принимается равной нулю, а в предлагаемом способе может быть произвольной.
Заявленное изобретение поясняется чертежами, на которых показаны:
на фиг. 1 положение вектора Пойтинга  а также векторов
а также векторов  и
и  в момент времени t1;
в момент времени t1;
на фиг. 2 положение вектора Пойтинга  а также векторов
а также векторов  и
и  в момент времени t2;
в момент времени t2;
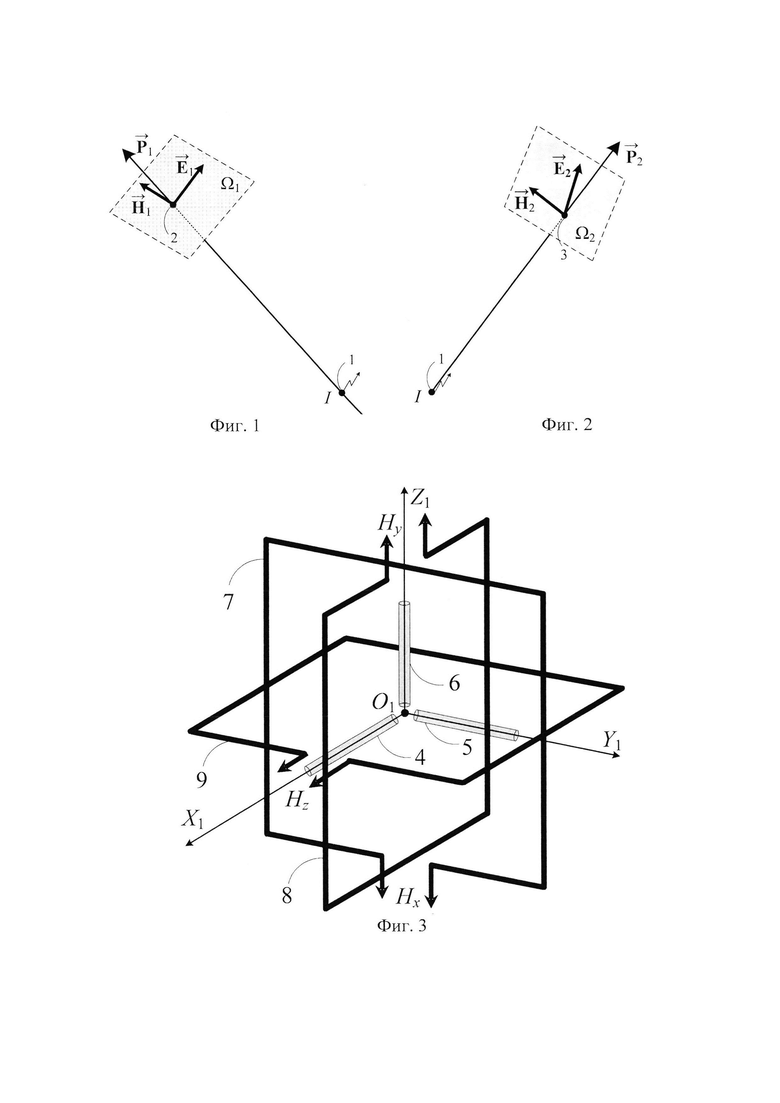
на фиг. 3 конфигурация КТОАС в ДСК;
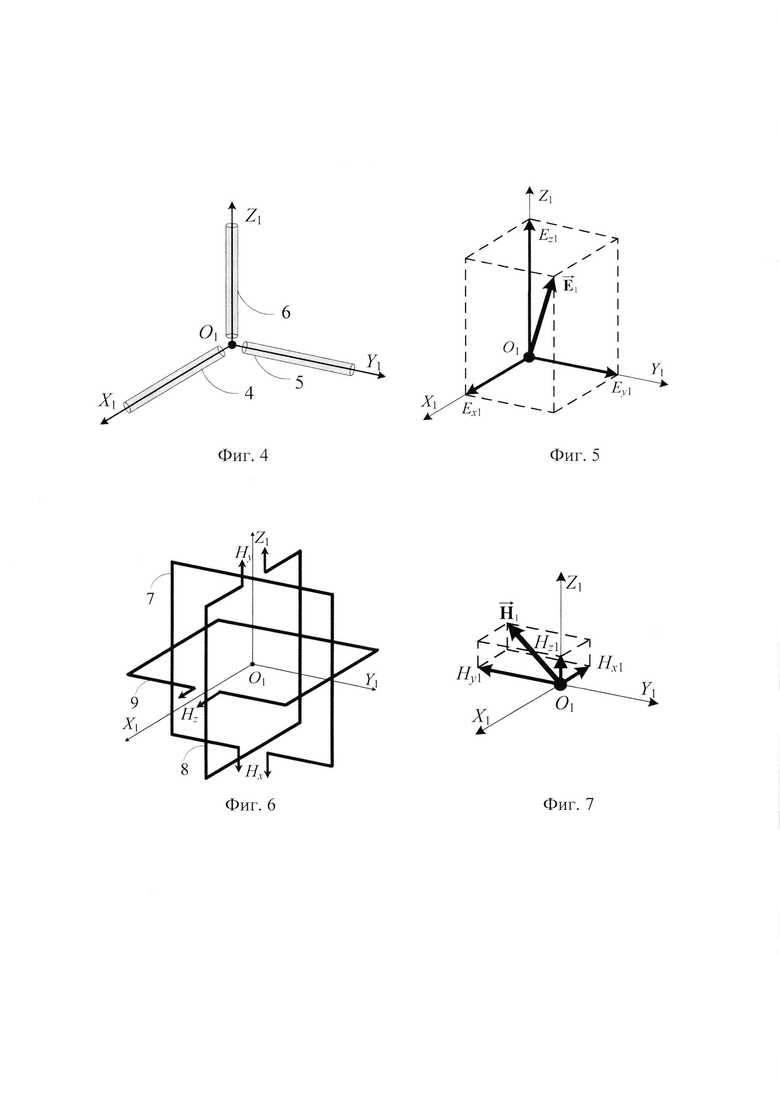
на фиг. 4 конфигурация части КТОАС - трех АЭ в виде несимметричных вибраторов штыревого типа в ДСК;
на фиг. 5 ортогональные компоненты Ех1, Еу1, Ez1 вектора напряженности электрического поля  в момент времени t1 в ДСК O1X1Y1Z1;
в момент времени t1 в ДСК O1X1Y1Z1;
на фиг. 6 конфигурация части КТОАС - трех рамочных АЭ в ДСК;
на фиг. 7 ортогональные компоненты Нх1, Ну1, Hz1 вектора напряженности магнитного поля  в момент времени t1 в ДСК O1X1Y1Z1;
в момент времени t1 в ДСК O1X1Y1Z1;
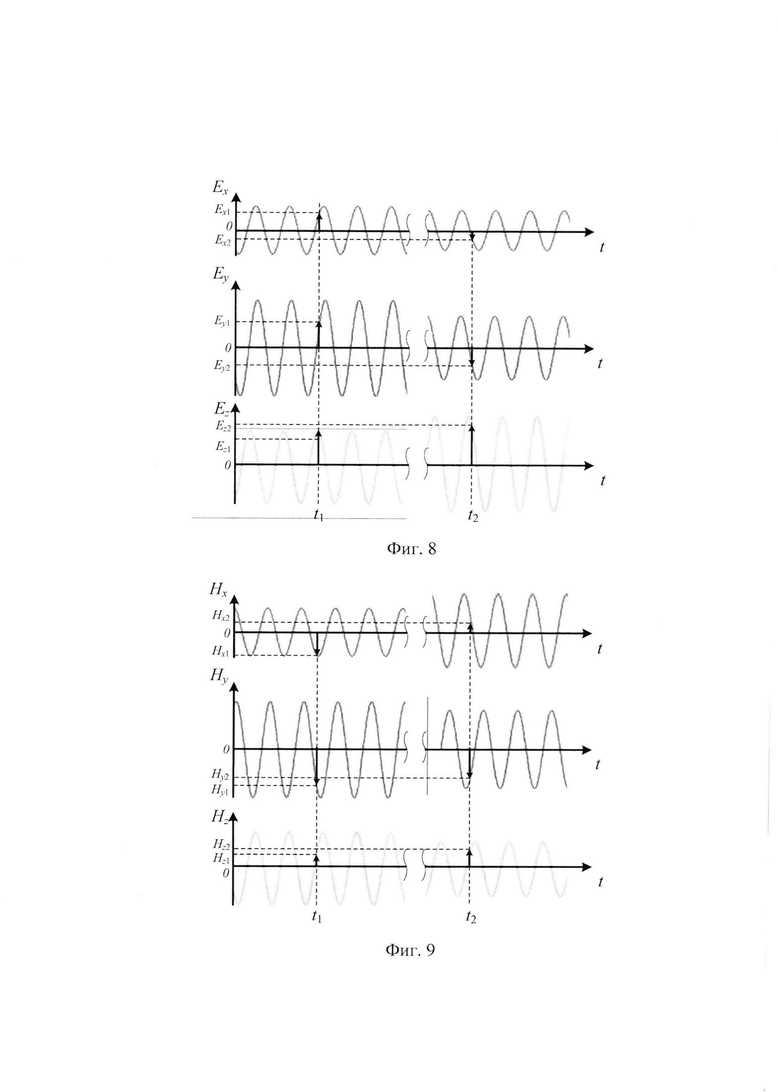
на фиг. 8 временные диаграммы ортогональных компонент Ех, Еу, Ez, принятых на АЭ 4, 5 и 6 КТОАС, а также их значения Ех1, Еу1, Ez1 и Ех2, Еу2, Ez2, измеренные в моменты времени t1 и t2 соответственно;
на фиг. 9 временные диаграммы ортогональных компонент Нх, Ну, Hz, принятых на АЭ 7, 8 и 9 КТОАС, а также их значения Нх1, Ну1, Hz1 и Hx2, Hy2, Hz2, измеренные в моменты времени t1 и t2 соответственно;
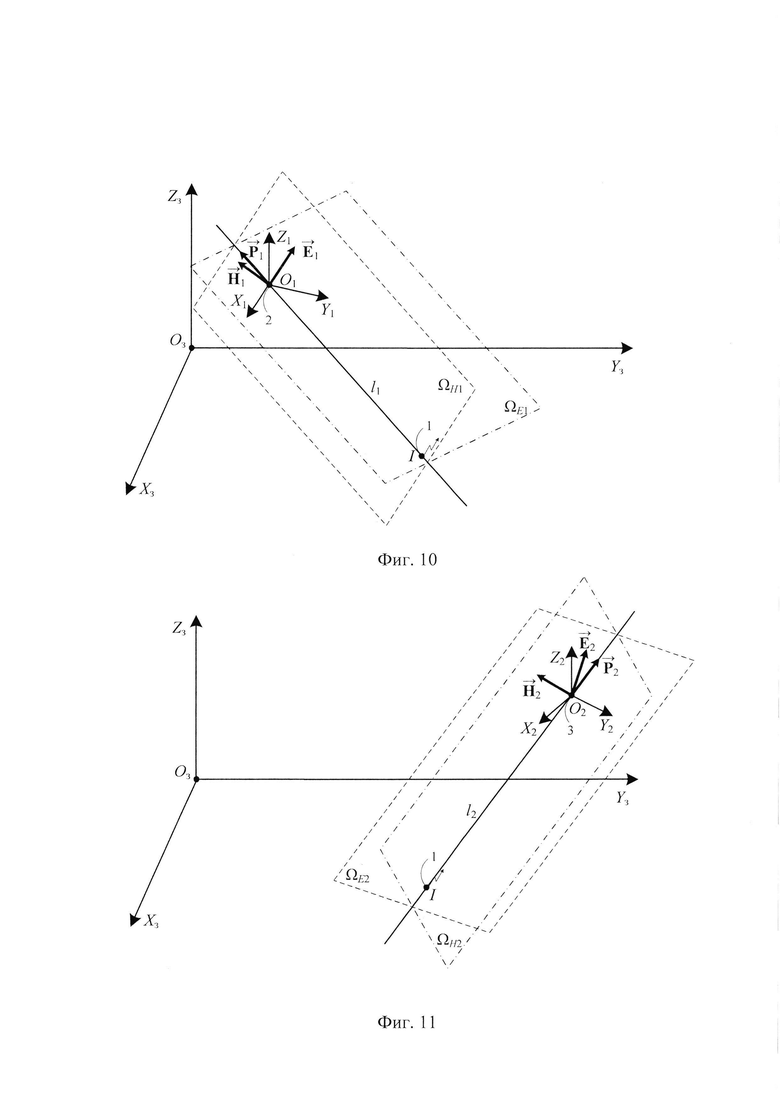
на фиг. 10 графическое представление вспомогательных плоскостей ΩE1 и ΩH1 в ДСК O1X1Y1Z1;
на фиг. 11 графическое представление вспомогательных плоскостей ΩE2 и ΩH2 в ДСК O2X2Y2Z2,
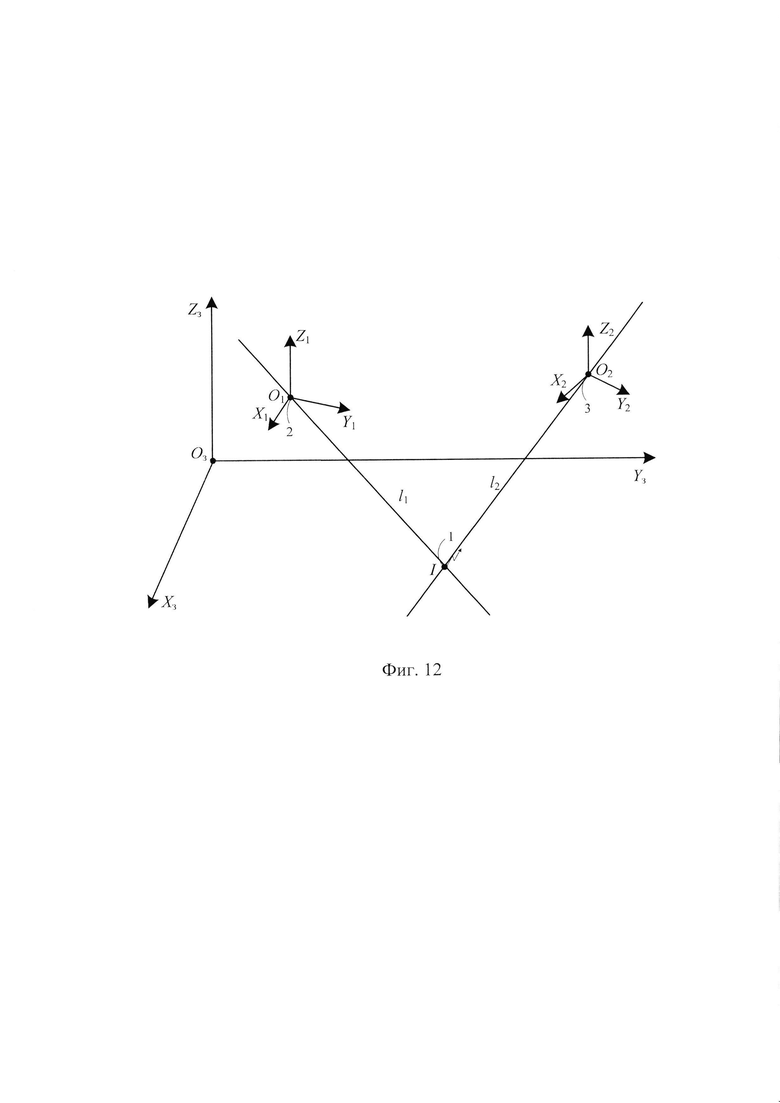
на фиг. 12 графическое представление определения координат ИРИ как пересечения линий положения ИРИ  и
и 
Определение координат ИРИ является важным составным элементом мониторинга сигналов. Достоинством системы ОМП ИРИ является скрытность при определении координат вследствие отсутствия активного излучения. Размещение технических средств системы ОМП на ЛА и в том числе на беспилотных ЛА позволяет существенно расширить зону мониторинга с возможностью осуществлять обнаружение и определение координат ИРИ в труднодоступных районах.
Использование ЛА в качестве платформы для развертывания средств радиомониторинга приводит к возникновению ряда проблем, основными из которых являются:
увеличение уровня помех и связанное с ним снижение отношения сигнал/шум на входе бортового радиоприемного устройства;
ограничение массогабаритных показателей полезной нагрузки на ЛА, которые не позволяют разместить на нем эффективные антенные системы и многоканальные радиоприемные устройства;
нестабильность ориентации ЛА в пространстве, которая приводит к резкому увеличению ошибок пеленгования и к снижению точности определения координат ИРИ.
Большинство способов определения координат ИРИ основано на пеленговании радиосигналов несколькими измерителями, либо одним, перемещающимся в пространстве измерителем. При этом точность пеленгования радиосигналов неизвестной поляризации классическими способами, ориентированными на обработку электромагнитного поля определенной поляризации, дает значительные погрешности пеленгования, если поляризационные характеристики пеленгаторной АС не согласованы с поляризацией падающих волн. Повышение точности пеленгования в большинстве случаев достигается увеличением базы пеленгаторной антенной системы, то есть разнесением в пространстве антенных элементов пеленгаторной антенной системы.
Существует возможность определения координат ИРИ с помощью сосредоточенной АС, способной определить поляризацию радиосигнала в точке приема.
Поляризация электромагнитной волны является ее пространственно-временной характеристикой и определяется видом траектории, описываемой концом вектора напряженности магнитного  или электрического
или электрического  поля в фиксированной точке пространства.
поля в фиксированной точке пространства.
На фиг. 1 отображены ИРИ 1 и измеритель 2 параметров электромагнитной волны в момент времени t1.
На фиг. 2 отображены ИРИ 1 и измеритель 3 параметров электромагнитной волны в момент времени t2.
Распространение электромагнитной волны сопровождается переносом энергии. Для характиристики этого явления вводят вектор Пойтинга  Он определяет направление и величину плотности потока мощности электромагнитного поля от ИРИ в каждой точке пространства.
Он определяет направление и величину плотности потока мощности электромагнитного поля от ИРИ в каждой точке пространства.
Вектор Пойтинга  совпадает с направлением распространения электромагнитной волны и является результатом векторного произведения векторов напряженности электрического
совпадает с направлением распространения электромагнитной волны и является результатом векторного произведения векторов напряженности электрического  и магнитного
и магнитного  полей, то есть образует вместе с ними правую тройку векторов.
полей, то есть образует вместе с ними правую тройку векторов.
На фиг. 1 и фиг. 2 отображены положения векторов Пойтинга  а также векторов напряженности электрического
а также векторов напряженности электрического 
 и магнитного
и магнитного 
 полей в разнесенных точках пространства в моменты времени t1 и t2 соответственно.
полей в разнесенных точках пространства в моменты времени t1 и t2 соответственно.
Кроме того, на фиг. 1 и фиг. 2 показана часть фазовых фронтов волны Ω1 и Ω2, определяемых как поверхность одинаковых фаз векторов поля ( или
или  ) перпендикулярных направлению распространения электромагнитной волны.
) перпендикулярных направлению распространения электромагнитной волны.
Сопоставив векторы напряженностей магнитного поля 
 и
и  в моменты времени t1 и t2 возможно определить координаты ИРИ.
в моменты времени t1 и t2 возможно определить координаты ИРИ.
В способе используют КТОАС, состоящая из трех АЭ в виде несимметричных вибраторов штыревого типа 4, 5 и 6 и трех рамочных АЭ 7, 8 и 9 (см. фиг. 3).
В предлагаемом способе для момента времени t1 используют ДСК O1X1Y1Z1, в которой центр координат O1 совмещен с центром КТОАС, оси O1X1, O1Y1 и O1Z1 направлены вдоль АЭ 4, 5 и 6. Кроме того, оси O1X1, O1Y1 и O1Z1 перпендикулярны АЭ 7, 8 и 9 соответственно (см. фиг. 3).
Аналогично, для момента времени t2 используют ДСК O2X2Y2Z2, в которой центр координат О2 совмещен с центром КТОАС, оси О2Х2, O2Y2 и O2Z2 направлены вдоль АЭ 4, 5 и 6. Кроме того, оси О2Х2, O2Y2 и O2Z2 перпендикулярны АЭ 7, 8 и 9 соответственно.
Для измерения ортогональных компонент вектора напряженности электрического поля  в заявленном способе используют часть КТОАС, состоящую из трех АЭ в виде несимметричных вибраторов штыревого типа АЭ 4, 5 и 6 (см. фиг. 4).
в заявленном способе используют часть КТОАС, состоящую из трех АЭ в виде несимметричных вибраторов штыревого типа АЭ 4, 5 и 6 (см. фиг. 4).
Векторная сумма ортогональных компонент напряженностей электрического поля Ех1, Еу1, Ez1, измеренных на АЭ 4, 5 и 6 КТОАС соответственно в момент времени t1 составляет вектор напряженности электрического поля  (см. фиг. 5).
(см. фиг. 5).
Аналогично, векторная сумма ортогональных компонент напряженностей электрического поля Ех2, Еу2, Ez2, измеренных на АЭ 4, 5 и 6 КТОАС в момент времени t2 составляет вектор напряженности электрического поля 
На фиг. 8 представлены временные диаграммы ортогональных компонент Ех, Еу, Ez, принятого в общем случае эллиптически поляризованного аналогового радиосигнала на АЭ 4, 5 и 6 КТОАС соответственно. В моменты времени t1 и t2 измеряют и запоминают значения компонент Ех1, Еу1, Ez1 и Ех2, Еу2, Ez2 с помощью АЭ 4, 5 и 6 КТОАС соответственно.
Строят вспомогательные плоскости ΩE1 и ΩE2, ортогональные векторам напряженности электрического поля  и
и  и проходящие через центры КТОАС в моменты времени t1 и t2, которые совмещены в свою очередь с началами ДСК O1X1Y1Z1 и O2X2Y2Z2 соответственно (см. фиг. 10 и фиг. 11). Вспомогательные плоскости ΩE1 и ΩE2 описываются уравнениями:
и проходящие через центры КТОАС в моменты времени t1 и t2, которые совмещены в свою очередь с началами ДСК O1X1Y1Z1 и O2X2Y2Z2 соответственно (см. фиг. 10 и фиг. 11). Вспомогательные плоскости ΩE1 и ΩE2 описываются уравнениями:


Для измерения ортогональных компонент вектора напряженности магнитного поля  в заявленном способе используют часть КТОАС, состоящую из трех ортогональных рамочных антенн АЭ 7, 8 и 9 (см. фиг. 6).
в заявленном способе используют часть КТОАС, состоящую из трех ортогональных рамочных антенн АЭ 7, 8 и 9 (см. фиг. 6).
Векторная сумма ортогональных компонент напряженностей магнитного поля Hx1, Hy1, Hz1, измеренных на АЭ 7, 8 и 9 КТОАС соответственно в момент времени t1 составляет вектор напряженности магнитного поля  (см. фиг. 7).
(см. фиг. 7).
Аналогично, векторная сумма ортогональных компонент напряженностей магнитного поля Hx2, Hy2, Hz2, измеренных на АЭ 7, 8 и 9 КТОАС соответственно в момент времени t2 составляет вектор напряженности магнитного поля 
На фиг. 9 представлены временные диаграммы ортогональных компонент Нх, Ну, Hz, принятого в общем случае эллиптически поляризованного аналогового радиосигнала на АЭ 7, 8 и 9 КТОАС соответственно. В моменты времени t1 и t2 измеряют и запоминают значения компонент Нх1, Ну1, Hz1 и Hx2, Hy2, Hz2 с помощью АЭ 7, 8 и 9 КТОАС соответственно.
Строят вспомогательные плоскости ΩH1 и ΩH2, ортогональные векторам напряженности электрического поля  и
и  и проходящие через центры КТОАС в моменты времени t1 и t2, которые совмещены в свою очередь с началами ДСК O1X1Y1Z1 и O2X2Y2Z2 соответственно (см. фиг. 10 и фиг. 11). Вспомогательные плоскости ΩH1 и ΩH2 описываются уравнениями:
и проходящие через центры КТОАС в моменты времени t1 и t2, которые совмещены в свою очередь с началами ДСК O1X1Y1Z1 и O2X2Y2Z2 соответственно (см. фиг. 10 и фиг. 11). Вспомогательные плоскости ΩH1 и ΩH2 описываются уравнениями:


Строят линию положения ИРИ  на пересечении плоскостей ΩE1 и ΩH1. Алгебраически такое построение соответствует решению системы уравнении (1)и(3):
на пересечении плоскостей ΩE1 и ΩH1. Алгебраически такое построение соответствует решению системы уравнении (1)и(3):
Аналогично строят линию положения ИРИ на пересечении плоскостей ΩE2 и ΩH2. Алгебраически такое построение соответствует решению системы уравнении (2) и (4):
Вычисляют координаты точки пересечения линий положения ИРИ  и
и  решая систему уравнений (1), (2), (3) и (4):
решая систему уравнений (1), (2), (3) и (4):
Решением данной системы будут координаты точки пересечения линий положения ИРИ и  Полученные координаты принимают в качестве координат ИРИ.
Полученные координаты принимают в качестве координат ИРИ.
Реализация заявленного способа преимущественно целесообразна при размещении КТОАС на подвижном объекте, в частности на ЛА. При этом необходимо с высокой точностью определять координаты ЛА и углы ориентации ЛА.
Совместное имитационное моделирование заявленного способа определения координат источника радиоизлучений с борта летательного аппарата и способа прототипа показало повышение точности определения координат ИРИ на 5…15% (в зависимости от высоты ИРИ над поверхностью Земли), в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной антенной системы, что указывает на возможность достижения указанного технического результата.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Волков Р.В., Саяпин В.Н., Севидов В.В. Способ определения местоположения пользовательского терминала с использованием двух спутников-ретрансляторов. Патент RU №2605457, опубл. 20.12.2016 Бюл. №35.
2. Агиевич С.Н., Дворников С.В., Земсков Д.С., Севидов В.В., Федоренко И.В. Способ определения координат источника радиоизлучения с использованием летательного аппарата. Патент RU №2644580, опубл. 13.02.2018 Бюл. №5.
3. Богдановский С.В., Гайдин А.П., Клишин А.В., Симонов А.Н. Способ определения координат источника радиоизлучений с борта летательного аппарата Патент RUS №2619915, опубл. 19.05.2017 Бюл. №14.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ ВИБРАТОРНОЙ АНТЕННОЙ СИСТЕМЫ | 2023 |
|
RU2822686C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ КОМБИНИРОВАННОЙ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741068C1 |
| Способ определения координат источника радиоизлучений с борта летательного аппарата с использованием триортогональной рамочной антенной системы | 2024 |
|
RU2824445C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ ВИБРАТОРНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741072C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2713866C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ РАМОЧНОЙ АНТЕННОЙ СИСТЕМЫ | 2020 |
|
RU2741074C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2018 |
|
RU2702102C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ТРИОРТОГОНАЛЬНОЙ АНТЕННОЙ СИСТЕМЫ | 2019 |
|
RU2709607C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ | 2016 |
|
RU2624449C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОЙ СЕЛЕКЦИИ ЭЛЕКТРОМАГНИТНЫХ ВОЛН С ПОСЛЕДУЮЩЕЙ ПОЛЯРИЗАЦИОННОЙ ОБРАБОТКОЙ СИГНАЛОВ | 2018 |
|
RU2720588C1 |
Изобретение относится к радиотехнике и может быть использовано в системах радиомониторинга при решении задачи скрытого определения координат источника радиоизлучения (ИРИ), в условиях априорной неопределенности относительно поляризационных и пространственных параметров радиосигналов, шумов и помех, когда налагаются ограничения на габаритные размеры пеленгаторной антенной системы, в частности для определения координат ИРИ с борта летательного аппарата (ЛА). Технический результат – повышение точности определения координат ИРИ на основе использования комбинированной триортогональной антенной системы (КТОАС), состоящей из трех антенных элементов в виде несимметричных вибраторов штыревого типа и трех рамочных антенных элементов. Способ основан на измерении с помощью КТОАС ортогональных компонент Ех1, Еу1, Ez1 и Ех2, Ey2, Ez2 векторов напряженности электрического поля  и
и  а также ортогональных компонент Hx1, Hy1, Hz1 и Hx2, Hy2, Hz2 векторов напряженности магнитного поля
а также ортогональных компонент Hx1, Hy1, Hz1 и Hx2, Hy2, Hz2 векторов напряженности магнитного поля  и
и  в различных точках пространства расположения ЛА в моменты времени t1 и t2, определении ориентации векторов
в различных точках пространства расположения ЛА в моменты времени t1 и t2, определении ориентации векторов 

 и
и  в пространстве, построении вспомогательных плоскостей ΩE1, ΩE2, ΩH1 и ΩH2, построении линий положения ИРИ
в пространстве, построении вспомогательных плоскостей ΩE1, ΩE2, ΩH1 и ΩH2, построении линий положения ИРИ  и
и  на пересечении вспомогательных плоскостей ΩE1, ΩH1 и ΩE2, ΩH2 соответственно, вычислении координат ИРИ в точке пересечения линий положения ИРИ
на пересечении вспомогательных плоскостей ΩE1, ΩH1 и ΩE2, ΩH2 соответственно, вычислении координат ИРИ в точке пересечения линий положения ИРИ  и
и  12 ил.
12 ил.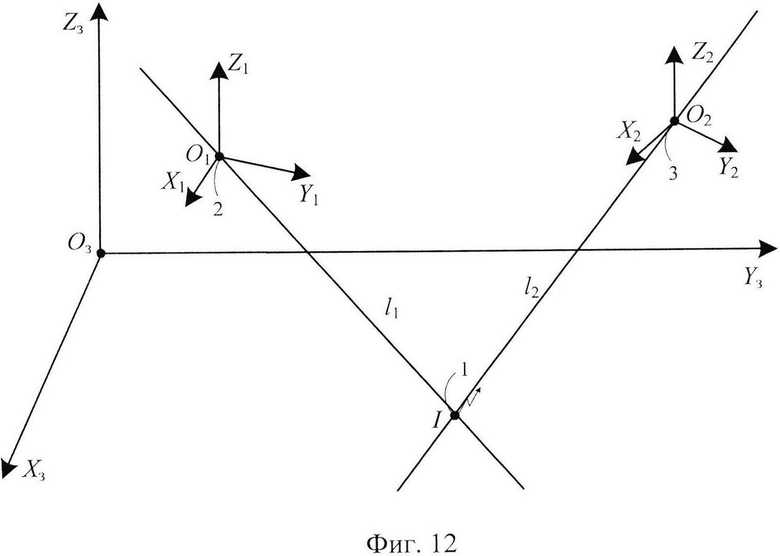
Способ определения координат источника радиоизлучения (ИРИ) с борта летательного аппарата с использованием триортогональной антенной системы (ТОАС), заключающийся в том, что выбирают декартову систему координат (ДСК) O3X3Y3Z3 для производства измерений и расчетов, размещают измерительную аппаратуру, оснащенную ТОАС, на летательном аппарате, который перемещают в пространстве, измеряют координаты центров ТОАС O1 и O2 и углы ориентации ТОАС в моменты времени t1 и t2, выбирают дополнительные ДСК O1X1Y1Z1 и O2X2Y2Z2 для производства измерений и расчетов с учетом координат центров ТОАС и углов ориентации ТОАС в моменты времени t1 и t2, измеряют в моменты времени t1 и t2 с помощью ТОАС ортогональные компоненты Ех1, Ey1, Ez1 и Ех2, Ey2, Ez2 векторов напряженности электрического поля  и
и  принятого аналогового радиосигнала, определяют ориентацию векторов напряженности электрического поля
принятого аналогового радиосигнала, определяют ориентацию векторов напряженности электрического поля  и
и  в ДСК O1X1Y1Z1 и O2X2Y2Z2 соответственно путем векторного сложения ортогональных компонент Ех1, Ey1, Ez1 и Ех2, Ey2, Ez2, строят вспомогательные плоскости ΩE1 и ΩE2 так, чтобы они были перпендикулярны векторам
в ДСК O1X1Y1Z1 и O2X2Y2Z2 соответственно путем векторного сложения ортогональных компонент Ех1, Ey1, Ez1 и Ех2, Ey2, Ez2, строят вспомогательные плоскости ΩE1 и ΩE2 так, чтобы они были перпендикулярны векторам  и
и  соответственно и проходили через начала координат O1 и О2, вычисляют координаты ИРИ с учетом вспомогательных плоскостей ΩE1 и ΩE2, отличающийся тем, что в качестве ТОАС используют комбинированную триортогональную антенную систему (КТОАС), состоящую из трех антенных элементов (АЭ) в виде несимметричных вибраторов штыревого типа и трех рамочных АЭ, а в моменты времени t1 и t2 дополнительно измеряют с помощью трех рамочных АЭ ортогональные компоненты Нх1, Ну1, Hz1 и Нх2, Hy2, Hz2 векторов напряженностей магнитного поля
соответственно и проходили через начала координат O1 и О2, вычисляют координаты ИРИ с учетом вспомогательных плоскостей ΩE1 и ΩE2, отличающийся тем, что в качестве ТОАС используют комбинированную триортогональную антенную систему (КТОАС), состоящую из трех антенных элементов (АЭ) в виде несимметричных вибраторов штыревого типа и трех рамочных АЭ, а в моменты времени t1 и t2 дополнительно измеряют с помощью трех рамочных АЭ ортогональные компоненты Нх1, Ну1, Hz1 и Нх2, Hy2, Hz2 векторов напряженностей магнитного поля  и
и  принятых аналоговых радиосигналов, определяют ориентацию векторов и в ДСК O1X1Y1Z1 и O2X2Y2Z2 соответственно путем векторного сложения ортогональных компонент Нх1, Ну1, Hz1 и Нх2, Hy2, Hz2, строят вспомогательные плоскости ΩH1 и ΩH2 так, чтобы они были перпендикулярны векторам
принятых аналоговых радиосигналов, определяют ориентацию векторов и в ДСК O1X1Y1Z1 и O2X2Y2Z2 соответственно путем векторного сложения ортогональных компонент Нх1, Ну1, Hz1 и Нх2, Hy2, Hz2, строят вспомогательные плоскости ΩH1 и ΩH2 так, чтобы они были перпендикулярны векторам  и
и  и проходили через начала координат O1 и О2, строят линии положения ИРИ
и проходили через начала координат O1 и О2, строят линии положения ИРИ  и
и  на пересечении вспомогательных плоскостей ΩE1 и ΩH1 и ΩE2 и ΩH2 соответственно, вычисляют координат ИРИ в точке пересечения линий положения ИРИ
на пересечении вспомогательных плоскостей ΩE1 и ΩH1 и ΩE2 и ΩH2 соответственно, вычисляют координат ИРИ в точке пересечения линий положения ИРИ  и
и 
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2619915C1 |
| Способ определения координат источника радиоизлучений с борта летательного аппарата по двум азимутальным пеленгам | 2016 |
|
RU2638177C1 |
| АНТЕННА ТРИОРТОГОНАЛЬНАЯ | 2016 |
|
RU2649097C1 |
| СОСТАВНОЙ ЭЛЕКТРИЧЕСКИ МАЛЫЙ РАМОЧНЫЙ ИЗЛУЧАТЕЛЬ С ЗЕРКАЛЬНОЙ СИММЕТРИЕЙ ЧЕТВЕРТОГО ПОРЯДКА И ПРИЕМНАЯ ТРИОРТОГОНАЛЬНАЯ АНТЕННАЯ СИСТЕМА КВ ДИАПАЗОНА НА ЕГО ОСНОВЕ | 2017 |
|
RU2659184C1 |
| WO 2007054724 A2, 18.05.2007 | |||
| US 7579988 B2, 25.08.2009 | |||
| СПОСОБ ПРОИЗВОДСТВА ОСНОВЫ ИЗ ЦИТРУСОВЫХ ПЛОДОВ ДЛЯ ЗАМУТНЁННЫХ НАПИТКОВ | 2002 |
|
RU2209016C1 |
| US 4533100 A, 06.08.1985. | |||

