Изобретение относится к авиационной технике и предназначено для измерения аэродинамических нагрузок, действующих на планирующий парашют (ПП) в воздушном потоке аэродинамической трубы (АДТ) при различных углах атаки и скольжения.
Известно «Устройство для измерения боковых аэродинамических характеристик планирующего парашюта в аэродинамической трубе» (патент РФ №2072947).Устройство, выбранного в качестве аналога, содержит две наклонные опорные балки, к верхней части которых прикреплены продольные балки, на концах которых размещаются верхние тензовесы, к которым крепятся траверсы. К траверсам с помощью коротких строп-завязок крепится нижний край концевых нервюр купола планирующего парашюта, стропы которого закреплены на нижней части наклонных опорных балок.
Устройство работает следующим образом: стропы ПП крепятся к нижней части наклонных опорных балок; с помощью вспомогательных удерживающих растяжек парашют вводится в поток и после выхода его на балансировочный угол атаки вспомогательные удерживающие растяжки ослабляются, а наклонные опорные балки перемещают так, чтобы траверсы были возможно ближе к нижнему краю концевых нервюр парашюта. Крепление купола парашюта к траверсам с помощью коротких строп - завязок позволяет зафиксировать парашют в балансировочном положении и, перемещая наклонные опорные балки, изменять углы атаки и скольжения купола парашюта; силы и моменты, измеряемые верхними тензовесами при отклонении углов атаки и скольжения от балансировочных значений, суммируются с учетом их ориентации.
Описанное устройство имеет следующие недостатки. Устройство не содержит механизмов регулировки, позволяющих испытывать ПП различных типоразмеров. Отсутствуют весовые элементы в узлах крепления строп к нижней части наклонных опорных балок, что снижает информативность и качество конечных результатов эксперимента.
Известно также устройство (патент РФ №2061629) для измерения аэродинамических характеристик планирующего парашюта, содержащее опорную балку и верхние тензовесы, так что на верхней части опорной балки укреплены верхние тензовесы с рамой, а на нижней части нижние тензовесы с шарнирным устройством, к внешней детали которого крепятся силовые стропы парашюта, а внутренняя деталь через нижние тензовесы укреплена на опорной балке. Недостатком данного устройства является то, что нижние тензовесы показывают только суммарную нагрузку от сил натяжения строп в левом и правом бортах, что не позволяет определять эти силы по отдельности при проектировании и эксплуатации ПП.
Известно также устройство для измерения аэродинамических характеристик парашюта в аэродинамической трубе (патент РФ №2655713), выбранное в качестве прототипа. Устройство, которое содержит основание, две наклонные опорные балки (с механизмами их развала), шарнирный механизм угла атаки, силовую стойку, верхние тензовесы для измерения нагрузок, возникающих на куполе, нижние тензовесы для измерения нагрузок, возникающих в коушах строп, платформу с узлами крепления основных строп ПП. Под коушем в данном случае понимается конструктивное соединение в виде петли строп парашюта, предназначенное для присоединения к спускаемому объекту. ПП может содержать один и более коушей. Узлами крепления строп парашюта являются ответные для коушей парашюта узлы, например, карабины, к которым подсоединяются нижние тензовесы, или кронштейны типа вилки.
Прототип имеет недостатки:
- ограниченность полноты и информативности получаемых данных при проведении испытаний, так как используются единственные нижние тензовесы, и, как правило, 6-ти компонентные тензовесы, так как при обработке результатов измерений необходимо знать вектор сил натяжения строп. Использование единственных нижних тензовесов не дает информации о нагрузках в узлах крепления строп в левом и правом борту (коушах) парашюта. Различие в нагрузках в левом и правом коушах при нулевом угле скольжения может привести к неправильному определению аэродинамических характеристик парашюта и должно быть устранено путем регулировки стропной системы парашюта до проведения основных испытаний; нагрузки в левом и правом бортах парашюта важно знать при асимметричном обдуве - при наличии углов скольжения, а также при асимметричном затягивании строп управления ПП.
- ограничен конструктивный и функциональный потенциал устройства, так как отсутствует возможность испытывать наиболее распространенные ПП с двумя коушами (а не только вариант ПП с 4-мя коушами): в этом случае основные стропы или стропы управления будут касаться конструктивных элементов устройства (шарнирного механизма угла атаки и других элементов), что недопустимо, так как искажаются результаты измерения нагрузок из-за неконтролируемого уменьшения измеряемых сил;
- отсутствует конструктивная возможность испытывать ПП с большим размахом крыла из-за ограниченного хода механизма развала наклонных опорных балок. А при увеличении хода механизма развала возрастают углы отклонения наклонных опорных балок от вертикали, в связи с этим уменьшается максимально возможная длина строп, а ПП с большим размахом крыла, как правило, имеют длинные стропы.
Настоящее изобретение направлено на решение следующих задач:
- повышение полноты и информативности получаемых данных при подготовке испытаний и во время испытаний;
- расширение функциональных возможностей устройства;
- обеспечение возможности проведения испытаний ПП с одним, двумя и более коушами;
- обеспечение возможности испытаний ПП с увеличенным размахом.
Получаемый технический результат изобретения включает:
- повышение информативности за счет увеличения объема полученных в эксперименте данных от каждого измерительного блока, установленного для каждого узла крепления строп;
- упрощение конструкции за счет использования в качестве нижних тензовесов более простых тензовесов, содержащихся в измерительном блоке например, однокомпонентных;
- расширение экспериментальных возможностей, в том числе, возможность испытания ПП с увеличенным размахом, обеспечение возможности измерения величины и направления отдельных нагрузок от строп в левом и правом бортах ПП и контроля их симметрии для наиболее распространенных ПП с двумя узлами крепления строп.
Технический результат достигается тем, что предлагаемое устройство для определения аэродинамических характеристик планирующего парашюта в аэродинамической трубе содержит основание с установленной на нем платформой, наклонные опорные балки, узлы крепления строп, верхние и нижние тензовесы, шарнирный механизм угла атаки, силовую стойку, причем платформа закреплена на силовой стойке, между платформой и узлами крепления строп установлены независимые друг от друга измерительные блоки, как минимум, содержащие нижние тензовесы, соединенные с узлами крепления строп, и датчики углов крена и тангажа.
Технический результат также достигается тем, что датчики углов крена и тангажа установлены в осях шарниров крена и тангажа, которые соединены с тензовесами с одной стороны и с платформой - с другой.
Технический результат также достигается тем, что для обеспечения испытаний различных конструкций ПП число узлов крепления строп и соответственно число измерительных блоков кратно двум.
Технический результат также достигается тем, что для определения нагрузок в узлах крепления строп нижние тензовесы могут быть однокомпонентными.
Технический результат также достигается тем, что платформа закреплена на силовой стойке с возможностью перемещения по направляющим при помощи механизма выдвижения-уборки, для обеспечения отсутствия касания основных стропы или стропы управления конструктивных элементов устройства (шарнирного механизма угла атаки и других элементов) и чтобы результаты измерения нагрузок не искажались из-за неконтролируемого уменьшения измеряемых сил.
Технический результат также достигается тем, что для возможности увеличения размаха крыла ПП шарнирный механизм угла атаки содержит механизм изменения расстояния между наклонными опорными балками.
Технический результат также достигается тем, что для обеспечения надежного испытания ПП с увеличенным размахом купола, механизм изменения расстояния между наклонными опорными балками снабжен сменными проставками различной длины для установки между наклонными опорными балками.
Технический результат также достигается тем, что механизм изменения расстояния между наклонными опорными балками может быть выполнен телескопическим с фиксаторами, например, с фиксаторами цангового типа.
Технический результат также достигается тем, что механизм выдвижения-уборки платформы и ее фиксации содержит привод перемещения платформы. Привод может быть выполнен механическим, электрическим или гидравлическим.
Перечень фигур:
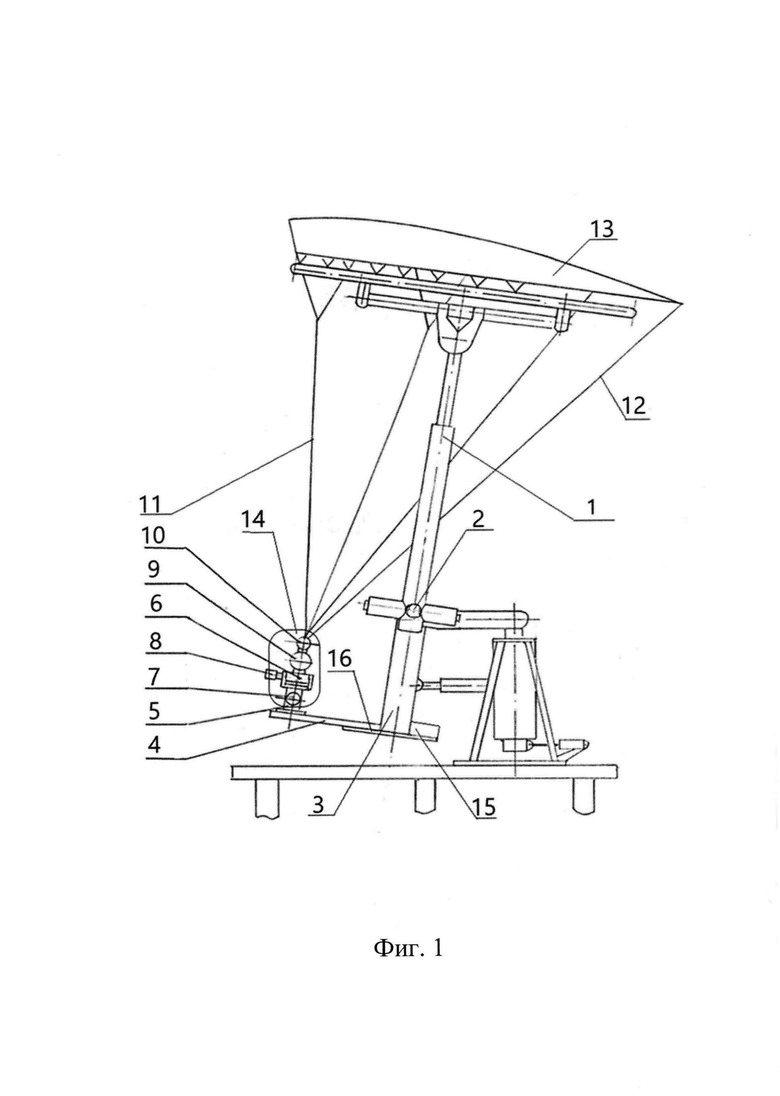
Фиг. 1 Схема предлагаемого устройства (вид сбоку)
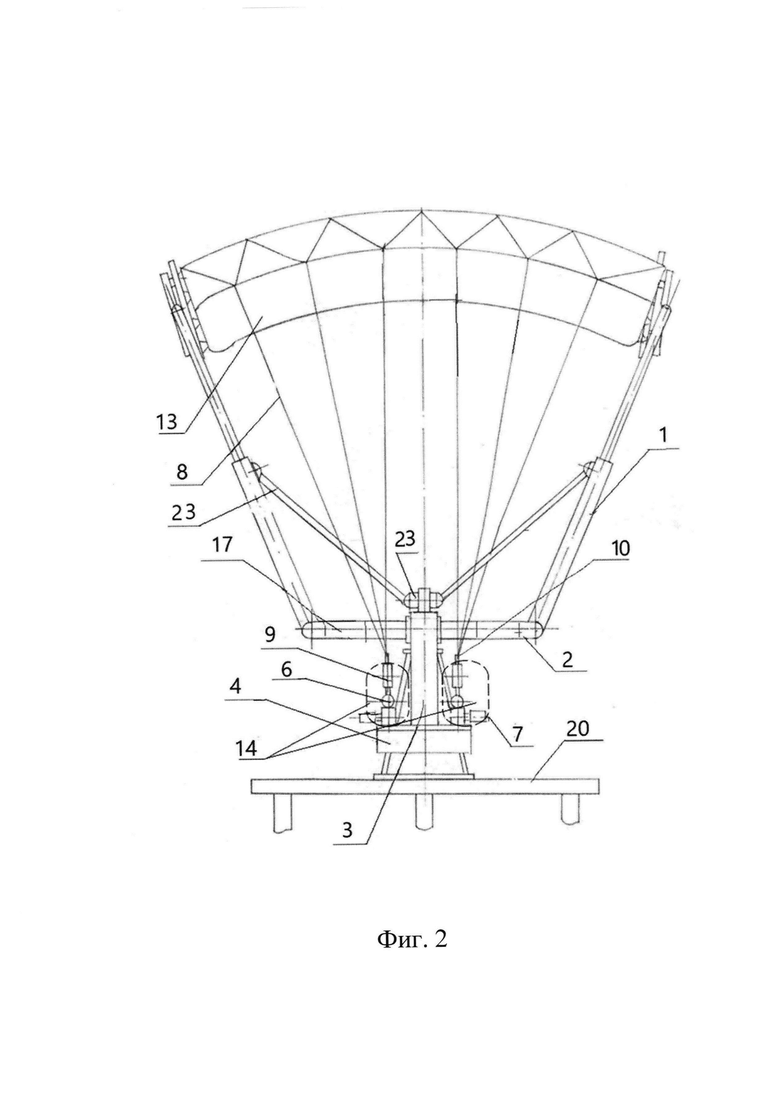
Фиг. 2 Схема предлагаемого устройства (вид по потоку АДТ)
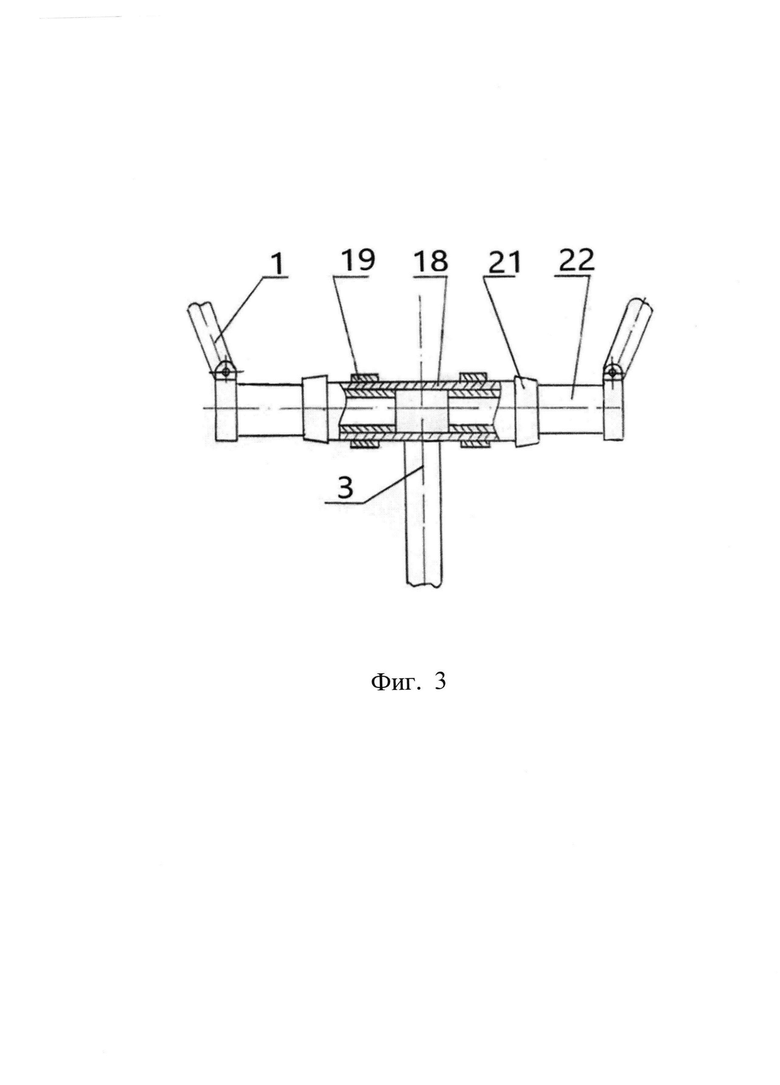
Фиг. 3 Шарнирный механизм угла атаки в виде телескопических труб
Предложенное устройство (на примере конструкции с двумя узлами крепления строп, Фиг. 1) содержит две наклонные опорные балки 1, которые через шарнирный механизм угла атаки 2 соединены с силовой стойкой 3, к которой крепится платформа 4 с шарнирами тангажа и крена 5, 6. В осях шарниров 5, 6 установлены датчики этих углов 7, 8. К верхнему из шарниров присоединены однокомпонентные нижние тензовесы 9, а к ним узлы крепления 10 основных строп 11 и стропы управления 12 купола ПП 13.
Измерительными блоками 14 выдается информация о величине и направлении сил от строп 11 и 12. Количество нижних тензовесов 9 в измерительных блоках 14 соответствует и равно количеству узлов крепления строп 10 ПП. Платформа 4 соединена с силовой стойкой 3 с помощью механизма выдвижения-уборки 15. Узлы крепления строп 10 парашюта и платформа 4 вынесены относительно силовой стойки 3 против потока АДТ на величину, достаточную для отсутствия касания основными стропами 11 и стропами управления 12 шарнирного механизма угла атаки 2. Положение платформы 4 относительно силовой стойки 3 может регулироваться с помощью механизма выдвижения-уборки 15. Механизм выдвижения-уборки 15 для передачи перемещения платформы по направляющим 16 выполнен червячной передачей (на фиг. 1 и 2 не показан). Привод также может быть выполнен электрическим, гидравлическим или ручным. В последнем случае в направляющих 16 платформы и, соответственно, на платформе 4 выполнены отверстия с постоянным шагом для обеспечения фиксации положения дискретно перемещаемой платформы с помощью стержня, устанавливаемого в отверстия (не показаны). Привод для механизма выдвижения-уборки 15 является самотормозящимся, что обеспечивает фиксацию заданного положения платформы независимо от прилагаемых парашютом нагрузок.
На платформе 4 могут располагаться узлы крепления строп 10 ПП как с двумя, так и 4-мя и более коушами строп ПП на различной поперечной базе (для этого в платформе 4 предусмотрены специальные посадочные места).
Между наклонными опорными балками 1 на шарнирном механизме угла атаки 2 расположены сменные проставки 17. Их длина подбирается под размах испытуемого парашюта. Шарнирный механизм угла атаки 2 может быть выполнен без сменных проставок 17, в виде телескопических труб (фиг. 3). Внешняя труба 18 - это труба большого диаметра, установленная в подшипниках 19, связанных с основанием 20, в плоскости симметрии соединена с силовой стойкой 3, на концах внешней трубы 18 установлены фиксаторы 21, например, цанговые. С торцов во внешнюю трубу 18 вложены две внутренние трубы 22 с использованием шлицевого или шпоночного соединения, чтобы исключить проворачивание. На концах внутренних труб 22 установлены наклонные опорные балки 1. Расстояние между внутренними трубами 22 и между наклонными опорными балками 1 может меняться в соответствии с требуемым размахом ПП.
Работает изобретение следующим образом.
Перед началом эксперимента производится градуировка однокомпонентных нижних тензовесов 9 и датчиков углов тангажа и крена 7, 8. Далее коуши основных строп 11 парашюта подсоединяются к узлам крепления строп 10 на платформе 4, и АДТ запускается. В пробных пусках после наполнения купола 13 определяется необходимое расстояние между наклонными балками 1, оно меняется с помощью сменных проставок 17 или перемещая внутренние трубы 22 шарнирного механизма угла атаки 2 и закрепляя их фиксаторами 21. С помощью механизма выдвижения-уборки 15 определяется положение платформы 4, исключающее касание строп управления 12 и основных строп 11 шарнирного механизма угла атаки 2 и механизма развала наклонных опорных балок 23.
После этого на заданной скорости потока АДТ проводится регулировка стропной системы основных строп 11 и строп управления 12, используя данные измерительных блоков 14 о нагрузках в левом и правом узлах крепления строп 10 нижних тензовесов 9 и добиваясь равенства сил и одинаковости показаний датчиков углов 7, 8 в обоих бортах платформы 4. После регулировки строп фиксируют купол 13 парашюта в балансировочном положении с помощью дистанционно-управляемых зажимов (не показаны) и по показаниям датчиков углов 7, 8 и нижних тензовесов 9 проверяют корректность фиксации: их показания до и после фиксации должны совпадать. В случае несовпадения углов и нагрузок купол 13 ПП расфиксируется и фиксируется вновь до достижения положительного результата. Далее по программе, изменяя углы атаки и скольжения устройства, регистрируют нагрузки и ориентацию сил нижних тензовесов 9 измерительных блоков 14. После завершения программы испытаний проводят обработку измерений нагрузок на верхних 24 и нижних тензовесах 9 в обоих бортах с учетом показаний датчиков углов тангажа и крена 7, 8 измерительных блоков 14.
Совокупность существенных признаков предложенного технического решения обеспечивает выполнение поставленных задач и достижение требуемого технического результата.
Изобретение реализовано в конструкции и прошло испытания при определении аэродинамических характеристик планирующего парашюта в аэродинамической трубе ЦАГИ.
Перечень позиций:
Наклонная опорная балка 1
Шарнирный механизм угла атаки 2
Силовая стойка 3
Платформа 4
Шарнир тангажа 5
Шарнир крена 6
Датчик угла тангажа 7
Датчик угла крена 8
Тензовесы нижние 9
Узел крепления строп 10
Стропы основные 11
Стропы управления 12
Купол парашюта 13
Измерительный блок 14
Механизм выдвижения-уборки платформы 15
Направляющие платформы 16
Сменная проставка 17
Внешняя труба 18
Подшипник 19
Основание 20
Фиксатор 21
Внутренняя труба 22
Механизм развала наклонных опорных балок 23
Тензовесы верхние 24
Балка продольная 25
Траверса 26
Стропы-завязки 27
Устройство крепления строп парашюта 28
Изобретение относится к авиационной технике и предназначено для измерения аэродинамических нагрузок, действующих на планирующий парашют (ПП) в воздушном потоке аэродинамической трубы (АДТ) при различных углах атаки и скольжения. Устройство содержит основание, установленную на нем платформу, наклонные опорные балки, узлы крепления строп, верхние и нижние тензовесы, шарнирный механизм угла атаки, силовую стойку, причем платформа закреплена на силовой стойке, между платформой и узлами крепления строп установлены независимые измерительные блоки, как минимум содержащие нижние тензовесы, соединенные с узлами крепления строп, и датчики крена и тангажа. Платформа закреплена на силовой стойке с возможностью перемещения по направляющим при помощи механизма выдвижения-уборки. Шарнирный механизм угла атаки содержит механизм изменения расстояния между наклонными опорными балками. В отличие от прототипа стропы ПП с двумя коушами не касаются элементов устройства и результаты измерения нагрузок не будут искажаться; используются нижние тензовесы с меньшим числом компонентов, нет ограничений для испытаний ПП с большим размахом крыла. Технический результат заключается в повышении полноты и информативности получаемых данных при подготовке и во время испытаний, расширении возможностей устройства, обеспечении проведения испытаний планирующего парашюта (ПП) с одним, двумя и более коушами, обеспечении испытаний ПП с увеличенным размахом, использовании весов с меньшим числом компонентов. 10 з.п. ф-лы, 3 ил. 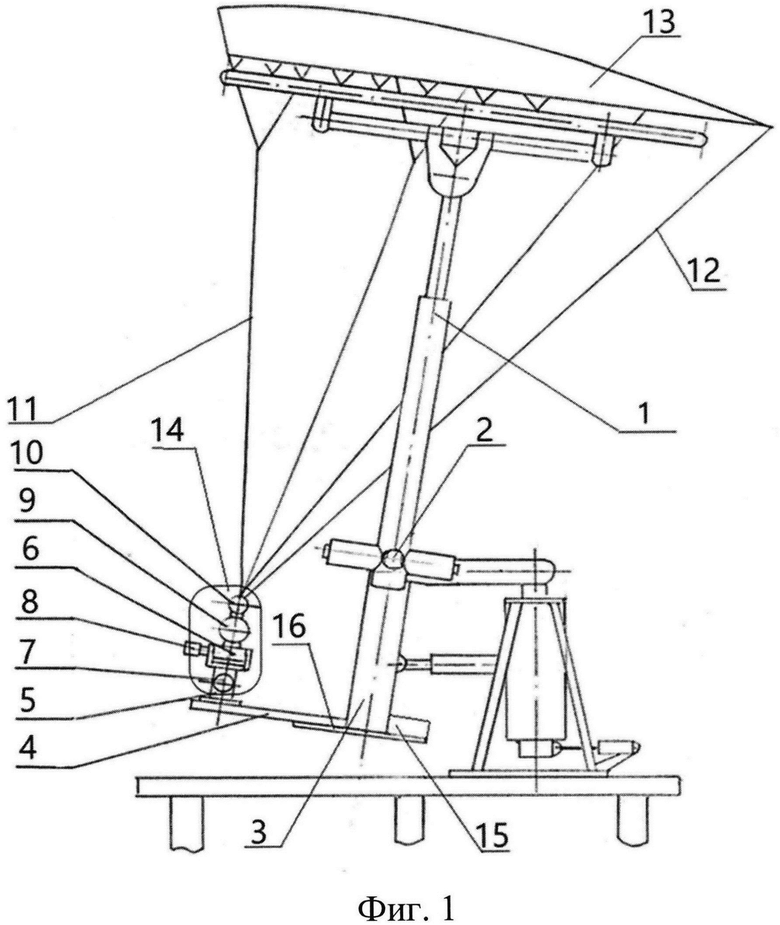
1. Устройство для определения аэродинамических характеристик планирующего парашюта в аэродинамической трубе, содержащее основание, установленную на нем платформу, наклонные опорные балки, узлы крепления строп, верхние и нижние тензовесы, шарнирный механизм угла атаки, силовую стойку, отличающееся тем, что платформа закреплена на силовой стойке, между платформой и узлами крепления строп установлены независимые друг от друга измерительные блоки, как минимум содержащие нижние тензовесы, соединенные с узлами крепления строп, и датчики углов крена и тангажа.
2. Устройство по п. 1, отличающееся тем, что датчики углов крена и тангажа установлены в осях шарниров крена и тангажа, которые соединены с тензовесами с одной стороны и с платформой - с другой.
3. Устройство по п. 1, отличающееся тем, что число узлов крепления строп и соответственно число измерительных блоков кратны двум.
4. Устройство по п. 1, отличающееся тем, что нижние тензовесы однокомпонентные.
5. Устройство по п. 1, отличающееся тем, что платформа закреплена на силовой стойке с возможностью перемещения по направляющим при помощи механизма выдвижения-уборки.
6. Устройство по п. 1, отличающееся тем, что шарнирный механизм угла атаки содержит механизм изменения расстояния между наклонными опорными балками.
7. Устройство по п. 6, отличающееся тем, что механизм изменения расстояния между наклонными опорными балками снабжен сменными проставками различной длины для установки между наклонными опорными балками.
8. Устройство по п. 6, отличающееся тем, что механизм изменения расстояния между наклонными опорными балками выполнен телескопическим с фиксаторами.
9. Устройство по п. 8, отличающееся тем, что фиксаторы цангового типа.
10. Устройство по п. 5, отличающееся тем, что механизм выдвижения-уборки платформы и ее фиксации содержит привод перемещения платформы.
11. Устройство по п. 10, отличающееся тем, что привод выполнен механическим, электрическим или гидравлическим.
| Устройство для измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе, модель планирующего парашюта для испытаний в аэродинамической трубе, способ измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе | 2017 |
|
RU2655713C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПЛАНИРУЮЩЕГО ПАРАШЮТА | 1993 |
|
RU2061629C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БОКОВЫХ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПЛАНИРУЮЩЕГО ПАРАШЮТА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 1993 |
|
RU2072947C1 |
| The FAST Wing project: Wind Tunnel Tests, Realization and Results | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |

