Изобретение относится к авиационной технике и предназначено для исследования в аэродинамической трубе (АДТ) нестационарного процесса раскрытия планирующего парашюта (ПП) и определения основных характеристик наполнения купола: времени раскрытия, пути наполнения и динамической нагрузки при раскрытии.
Известно устройство для определения в АДТ времени раскрытия и динамической нагрузки при наполнении купола парашюта, лишённого аэродинамического качества, принятое в качестве аналога (Носарев И.М. Экспериментальное исследование аэродинамических характеристик трёхкупольной парашютной системы. Сб. Парашюты и проницаемые тела. Институт механики МГУ. Изд. МГУ. 1980). Оно состоит из установленной в АДТ державки с площадкой, к которой крепится камера-контейнер с уложенным в неё парашютом. С камерой-контейнером соединён вытяжной парашют. Коуш парашюта связан через вертлюг и тензодатчик с державкой. Камера-контейнер прикреплена к площадке (или тросовой подвеске) дистанционно управляемым замком. На заданной скорости потока подаётся сигнал на замок, вытяжной парашют стягивает камеру-контейнер с испытываемого парашюта, стропы и купол попадают в поток, и купол начинает наполняться. Тензодатчик с помощью информационно-измерительной системы (ИИС) фиксирует динамическую нагрузку в процессе наполнения.
Устройство имеет недостатки. Наполнение купола происходит при постоянной скорости потока, обтекающего купол, это приводит к ошибке в определении динамической нагрузки и времени наполнения, так как при торможении скорость уменьшается. Во-вторых, из-за того, что парашют через тензодатчик соединён с державкой, имеющей вес, значительно превышающий вес приземляемого на парашютной системе (ПС) груза, зарегистрированная динамическая нагрузка оказывается завышенной. Время наполнения определяется с низкой точностью, так как скорость обтекания купола постоянна. Не определяется и такая важная для ПС характеристика, как путь наполнения, так как парашют зафиксирован.
Известно устройство для определения характеристик раскрытия парашюта в АДТ, принятое в качестве прототипа (патент №2780608 Свириденко А.Н., Сойнов А.И., 28.09.2022 г.). Оно состоит из державки с площадкой, на которой закреплена камера-контейнер с парашютом, камера закреплена на площадке дистанционно управляемым замком и соединена с вытяжным парашютом. Коуши парашюта соединены с подвижной частью вертлюга, а его неподвижная часть – посредством гибкого звена, через блок – с грузом. Через вытяжной парашют, камеру, парашют и вертлюг проходит поддерживающий трос, натянутый по потоку и прикреплённый к державке. В гибкое звено встроен тензодатчик, включённый в цепь ИИС. В боковой и фронтальной проекциях установлены видеокамеры. На заданной скорости потока замок освобождает камеру, вытяжной парашют сдёргивает её с парашюта, купол начинает наполняться, поднимая груз посредством гибкого звена и перемещаясь по потоку по поддерживающему тросу. С помощью тензодатчика определяется динамическая нагрузка наполнения, а с помощью видеокамер – время раскрытия и путь наполнения.
Устройство имеет недостатки. С его помощью невозможно исследовать процесс раскрытия ПП. Возникающая при раскрытии ПП подъёмная сила искривляет вначале горизонтальную (в АДТ) траекторию движения ПП, а поддерживающий трос, проходящий через купол, не даёт возможности выйти парашюту на присущий ему балансировочный угол атаки. Во-вторых, одна из важных характеристик наполнения купола, кроме динамической нагрузки, – изменение угла тангажа по времени. Анализ характера изменения этого угла по времени позволяет судить об интенсивности процесса раскрытия, о траектории подъёма ПП, эффективности применённого рифления или особенностях укладки ПП в камеру-контейнер. В устройстве датчик тангажа отсутствует: угол тангажа не меняется. В-третьих, ПП может выйти при движении вверх в пограничный слой, где скорость потока начинает уменьшаться, а аэродинамические характеристики будут искажены. Поперечный размер ядра воздушного потока, вытекающего из сопла АДТ, ограничен либо стенками – в закрытых рабочих частях труб, либо пограничным слоем в трубах с открытой рабочей частью. Натурные трубы, как правило, имеют открытую рабочую часть. В устройстве отсутствует элемент, ограничивающий перемещение ПП по вертикали. Ограничить вертикальное перемещение ПП с помощью гибкого звена невозможно, так как реальная траектория ПП заранее неизвестна.
Настоящее изобретение предназначено для исследования в АДТ нестационарного процесса раскрытия планирующего парашюта и определения основных характеристик наполнения купола: времени раскрытия, пути наполнения и динамической нагрузки при раскрытии.
Техническим результатом является:
- повышение точности определения динамической нагрузки при раскрытии планирующего парашюта и времени его наполнения за счёт учёта влияния силы веса присоединённого к парашюту груза;
- определение пути наполнения планирующего парашюта.
Технический результат достигается тем, что в устройстве для определения характеристик раскрытия планирующего парашюта в аэродинамической трубе, содержащем державку с площадкой и поддерживающим тросом, камеру-контейнер с уложенным парашютом, прикреплённую к площадке дистанционно управляемым замком, вытяжной парашют, соединённый с камерой-контейнером, блоки, гибкое звено, соединяющее парашют с грузом, тензодатчик, вмонтированный в гибкое звено, видеокамеры, так что оно снабжено: установленной на площадке с помощью шарниров тангажа и скольжения направляющей трубкой с размещённым внутри неё блоком и проходящим через неё гибким звеном, соединяющим груз со свободными концами планирующего парашюта; датчиком тангажа, закреплённым на шарнире тангажа; страховочным шнуром, прикреплённым к задней кромке планирующего парашюта с кольцом, сквозь которое проходит поддерживающий трос, соединённый с державкой на уровне ниже уровня гибкого звена.
Ось вращения шарнира тангажа совмещена с плоскостью торца направляющей трубки.
Ось вращения шарнира скольжения совмещена с отверстием для гибкого звена.
Державка имеет несколько посадочных мест для крепления площадки.
Форма поперечного сечения направляющей трубки квадратная или прямоугольная.
Ось вращения блока совмещена с осью шарнира тангажа.
Перечень фигур:
Фиг. 1 – Схема предлагаемого устройства (вид сбоку).
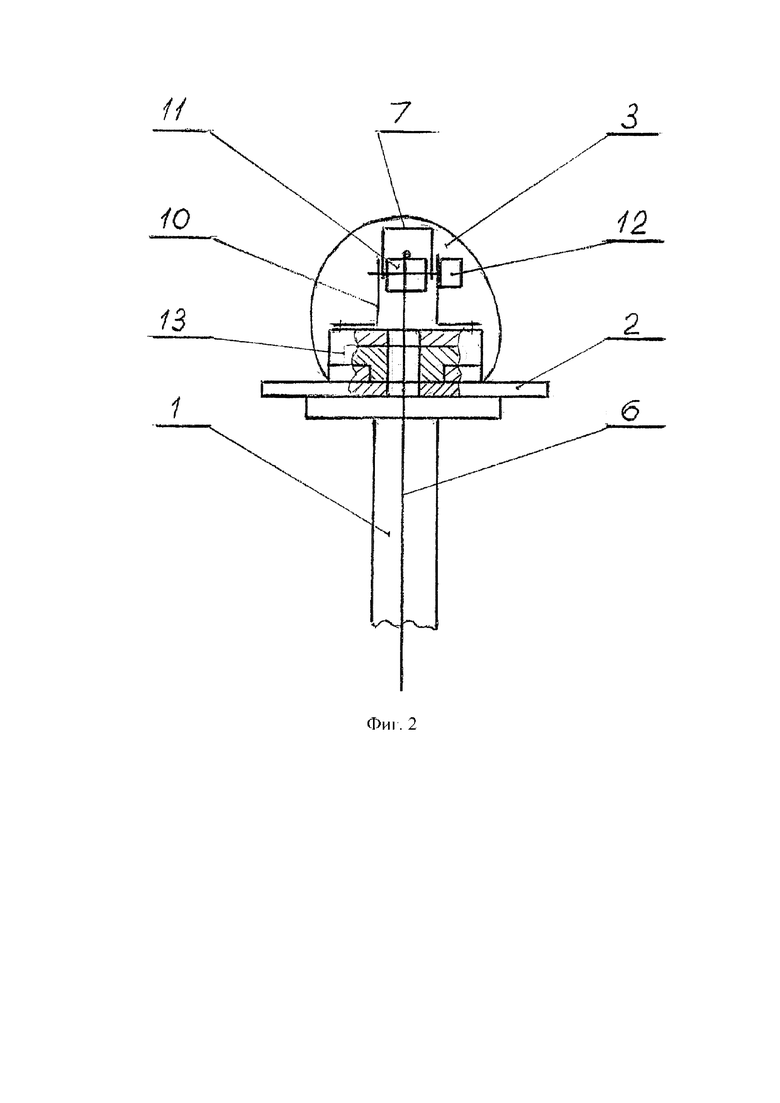
Фиг. 2 – Схема предлагаемого устройства (вид по потоку).
Перечень позиций:
1 – державка
2 – площадка
3 – камера-контейнер
4 – планирующий парашют
5 – дистанционно управляемый замок
6 – гибкое звено
7 – направляющая трубка
8 – груз
9 – обтекатель
10 – кронштейн шарнира тангажа
11 – блок
12 – датчик угла тангажа
13 – шарнир скольжения
14 – тензодатчик
15 – вытяжной парашют
16 – поддерживающий трос
17 – страховочный шнур
18 – кольцо
19 – видеокамера
Устройство состоит из обтекаемой державки 1, к верхнему фланцу которой прикреплена площадка 2, на ней размещена камера-контейнер 3 с уложенным в неё ПП 4. Державка 1 установлена в открытой рабочей части АДТ и имеет несколько посадочных мест для крепления площадки 2, отличающихся высотой крепления. Камера-контейнер 3 прикреплена к площадке 2 дистанционно управляемым замком 5. Свободные концы ПП 4 соединены гибким звеном 6, пропущенным внутри направляющей трубки 7, с грузом 8, размещённым вертикально в обтекателе 9. Обтекатель 9 может отсутствовать, если нет больших скоростей потока воздуха в месте установки груза 8. Направляющая трубка 7, квадратная или прямоугольная в сечении, закреплена на кронштейне шарнира тангажа 10. Ось вращения шарнира тангажа жёстко связана с направляющей трубкой 7 и совпадает с плоскостью её торца, обращённого к набегающему потоку, и находится в нижней части торца. На этой же оси размещён свободновращающийся блок 11, расположенный таким образом, что примерно четверть его боковой поверхности находится внутри направляющей трубки 7, в которой снизу имеется вырез под блок 11. Ось вращения блока 11 в общем случае может не совпадать с осью вращения направляющей трубки 7. Совмещение оси вращения направляющей трубки 7 с плоскостью её торца позволяет ей занимать любое угловое положение от отрицательных углов до вертикального положения, при этом вертикальный участок гибкого звена 6 от груза 8 до блока 11 не отклоняется от своего начального – вертикального – положения, и возмущения груза 8 отсутствуют. На кронштейне тангажа 10 закреплён датчик угла тангажа 12. Кронштейн тангажа 10 закреплён на шарнире скольжения 13, установленном на площадке 2. В основании кронштейна шарнира тангажа 10 и в центре шарнира скольжения 13 выполнены соосные отверстия, в которые проходит вертикальный участок гибкого звена 6. Ось вращения шарнира скольжения 13 совмещена с осью отверстия для гибкого звена 6 для обеспечения постоянного зазора между гибким звеном 6 и шарниром скольжения 13. Крепление кронштейна 10 к шарниру скольжения 13 устраняет боковые нагрузки с узлов крепления направляющей трубки 7 к кронштейну шарнира тангажа 10, а соединение направляющей трубки 7 с шарнирами тангажа и скольжения обеспечивает минимальные возмущения грузу 8 от гибкого звена 6 при интенсивной динамике раскрытия ПП 4. В гибкое звено 6 вставлен тензодатчик 14, соединённый с ИИС (не показано). К камере-контейнеру 3 присоединён вытяжной парашют 15, находящийся в потоке при работе АДТ. Между державкой 1 и диффузором АДТ (не показан) в рабочей части трубы натянут по потоку поддерживающий трос 16, он ниже уровня площадки 2, чтобы не препятствовать раскрытию ПП 4 и связанному с ним гибкому звену 6. К задней кромке ПП 4 прикреплён страховочный шнур 17, его конец закреплён на кольце 18, сквозь которое пропущен поддерживающий трос 16. Кольцо 18 может перемещаться по поддерживающему тросу 16 с малым трением. Страховочный шнур 17 уложен на задней кромке ПП 4 в специальные соты (не показаны), не мешающие возможному применению различных систем рифления купола ПП 4. В рабочей части АДТ в боковой и фронтальной проекциях установлены скоростные, синхронизированные с тензодатчиком 14, видеокамеры 19. Фронтальная видеокамера установлена на сопле АДТ (не показана).
Устройство работает следующим образом. Перед началом эксперимента ПП 4 укладывается в камеру-контейнер 3, она фиксируется на площадке 2 дистанционно управляемым замком 5. Свободные концы ПП 4 (концы строп) соединяют гибким звеном 6 с грузом 8, продевая гибкое звено 6 сквозь направляющую трубку 7 с блоком 11, её начальное положение близко к горизонтальному. Слабину гибкого звена 6 выбирают, подбирая его необходимую длину. Груз 8 размещают на нижнем торце обтекателя 9 или на опоре державки 1. К камере-контейнеру 3 присоединяют вытяжной парашют 15. Страховочный шнур 17 от ПП 4 соединяют с кольцом 18 на поддерживающем тросе 16. Устанавливают видеокамеры 19. На заданной скорости потока АДТ с пульта (не показан) подаётся сигнал на дистанционно управляемый замок 5, он, срабатывая, освобождает камеру 3, и она под действием вытяжного парашюта 15 начинает смещаться по потоку, извлекая стропы ПП 4 из камеры-контейнера 3 и натягивая гибкое звено 6. Груз 8 начинает подниматься вверх при наполнении купола ПП 4. Двигаясь вместе с грузом 8, ПП 4 уменьшает реальную скорость его обтекания, а сила натяжения его строп от силы веса груза 8 влияет на процесс раскрытия – аналогично лётному эксперименту. Наполняясь через воздухозаборники, профили мягкого крыла (ПП 4) начинают создавать подъёмную силу, под действием которой ПП 4 поднимается вверх. Направляющая трубка 7 отслеживает это движение, а ИИС с помощью датчика угла тангажа 12 регистрирует изменение угла тангажа по времени, то есть угла наклона траектории ПП 4. С помощью тензодатчика 14 регистрируется изменение полной аэродинамической силы ПП 4. Анализ позволяет выявить максимум динамической нагрузки и соответствующую ей фазу раскрытия по видеосъёмке, а также время раскрытия и путь наполнения. Страховочный шнур 17, перемещая кольцо 18 по поддерживающему тросу 16, не позволяет куполу парашюта выйти за границу ядра потока, в пограничный слой. Длина страховочного шнура 17 подбирается по расчёту и корректируется опытным путём. В случае, если ПП 4 входит в зону пограничного слоя, смещают площадку 2 с камерой-контейнером 3 на державке 1 вниз, на другое посадочное место, или используют модель ПП 4 с меньшей площадью купола, у которой путь наполнения соответствует расстоянию по вертикали от площадки 2 до границы пограничного слоя АДТ. После окончания наполнения ПП 4 и остановки груза 8 упором (не показан) на обтекателе 9 скорость сбрасывается до нуля, ПП 4 укладывается в камеру-контейнер 3 с иной системой рифления, груз 8 возвращают в исходное положение. Опыт повторяют при изменении скорости потока и/или схемы рифления. По записям нагрузки тензодатчиком 14 и с помощью видеосъёмки камерами 19 определяют максимальную нагрузку при наполнении ПП 4, время раскрытия и путь наполнения. Величина пути наполнения определяется из расшифровки кадров видеокамеры 19 боковой проекции, а время раскрытия – фронтальной камеры продольной проекции. Анализ показаний датчика угла тангажа 12 позволяет определить изменение угла наклона траектории ПП 4 по времени и оценить интенсивность процесса раскрытия при применённой системе рифления.
Благодаря наличию механической связи посредством гибкого звена 6 между ПП 4 и грузом 8 воспроизводится влияние силы веса груза, приземляемого на ПС, на процесс раскрытия ПП 4 и обеспечивается более точное получение характеристик раскрытия: динамической нагрузки, времени и пути наполнения. Ранее динамическая нагрузка и время наполнения определялись приближённо, а путь наполнения не определялся, хотя он определяет минимально безопасную высоту применения ПС.
Благодаря оснащению устройства направляющей трубкой 7, кронштейном шарнира тангажа 10 и датчиком угла тангажа 12 обеспечивается получение необходимой информации о динамике раскрытия, об изменении по времени угла наклона траектории ПП 4. Эти данные позволяют дать оценку интенсивности процесса раскрытия и эффективности применяемого рифления.
Применение в устройстве страховочного шнура 17 определённой длины с кольцом 18, перемещающимся по поддерживающему тросу 16, обеспечивает гарантированное размещение ПП 4 в ядре потока АДТ, в зоне постоянных скоростей и вне погранслоя, что устраняет ошибки, связанные с нарушением условий обтекания купола.
Использование шарнира скольжения 13, устраняя боковые нагрузки на кронштейне шарнира тангажа 10, обеспечивает его работоспособность, даёт возможность установки в дальнейшем датчика угла скольжения.
Таким образом, заявленная совокупность признаков необходима и достаточна для достижения технического результата:
- повышения точности определения динамической нагрузки и времени раскрытия планирующего парашюта за счёт учёта влияния силы веса груза;
- определения пути наполнения планирующего парашюта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения характеристик раскрытия парашюта в аэродинамической трубе | 2021 |
|
RU2780608C1 |
| Устройство для измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе, модель планирующего парашюта для испытаний в аэродинамической трубе, способ измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе | 2017 |
|
RU2655713C1 |
| ПЛАНИРУЮЩИЙ ПАРАШЮТ | 1996 |
|
RU2094324C1 |
| УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ СТАРТА РАКЕТЫ С САМОЛЕТА И СПОСОБ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422329C1 |
| Устройство для определения нагрузок планирующего парашюта в аэродинамической трубе | 2022 |
|
RU2788944C1 |
| ПАРАШЮТНАЯ СИСТЕМА | 2024 |
|
RU2827124C1 |
| ДЕСАНТИРУЕМЫЙ КОМПЛЕКС СПАСАТЕЛЬНЫХ ПЛОТОВ | 2020 |
|
RU2753735C1 |
| Устройство для определения аэродинамических характеристик планирующего парашюта в аэродинамической трубе | 2019 |
|
RU2714529C1 |
| Устройство для определения нагрузок планирующего парашюта в аэродинамической трубе | 2019 |
|
RU2761121C2 |
| ПАРАШЮТНАЯ СИСТЕМА ДЛЯ ДЕСАНТИРОВАНИЯ | 2024 |
|
RU2840304C1 |

Изобретение относится к авиационной технике и предназначено для исследования процесса раскрытия планирующего парашюта (ПП) в аэродинамической трубе (АДТ). Устройство содержит державку с площадкой, на которой дистанционно управляемым замком закреплена камера-контейнер с уложенным в неё ПП и с прикреплённым к ней вытяжным парашютом, гибкое звено с блоком и тензодатчиком, соединяющее ПП с грузом, видеокамеры. Устройство снабжено: шарнирно закреплённой на площадке направляющей трубкой, сквозь которую проходит соединяющее ПП с грузом гибкое звено, датчиком тангажа и прикреплённым к задней кромке профиля ПП страховочным шнуром с кольцом, свободно перемещающимся по поддерживающему тросу, соединённому с державкой. Техническим результат: повышение точности определения динамической нагрузки при раскрытии планирующего парашюта и времени его наполнения и обеспечение возможности определения пути наполнения планирующего парашюта. 5 з.п. ф-лы, 2 ил.
1. Устройство для определения характеристик раскрытия планирующего парашюта в аэродинамической трубе, содержащее державку с площадкой и поддерживающим тросом, камеру-контейнер с уложенным парашютом, прикреплённую к площадке дистанционно управляемым замком, вытяжной парашют, соединённый с камерой-контейнером, блоки, гибкое звено, соединяющее парашют с грузом, тензодатчик, вмонтированный в гибкое звено, видеокамеры, отличающееся тем, что оно снабжено: установленной на площадке с помощью шарниров тангажа и скольжения направляющей трубкой с размещённым внутри нее блоком и проходящим через неё гибким звеном, соединяющим груз со свободными концами планирующего парашюта; датчиком тангажа, закреплённым на шарнире тангажа; страховочным шнуром, прикреплённым к задней кромке планирующего парашюта с кольцом, сквозь которое проходит поддерживающий трос, соединённый с державкой на уровне ниже уровня гибкого звена.
2. Устройство по п. 1, отличающееся тем, что ось вращения шарнира тангажа совмещена с плоскостью торца направляющей трубки, обращённому к набегающему потоку.
3. Устройство по п. 1, отличающееся тем, что ось вращения шарнира скольжения совмещена с отверстием для гибкого звена.
4. Устройство по п. 1, отличающееся тем, что державка имеет несколько посадочных мест для крепления площадки, отличающихся высотой крепления.
5. Устройство по п. 1, отличающееся тем, что форма поперечного сечения направляющей трубки квадратная или прямоугольная.
6. Устройство по п. 1, отличающееся тем, что ось вращения блока совмещена с осью шарнира тангажа.
| УСТРОЙСТВО ДЛЯ РАСКРЫТИЯ ПАРАШЮТА | 1990 |
|
RU1793646C |
| Захват для транспортирования пакетов листов или других грузов | 1960 |
|
SU135618A1 |
| WO 2017178922 A1, 19.10.2017 | |||
| Центрифуга с вибрационной выгрузкой осадка | 1979 |
|
SU878350A1 |
| CN 109141805 B, 23.10.2020. | |||

