Изобретение относится к авиационной технике и предназначено для измерения аэродинамических нагрузок, действующих на планирующий парашют (ПП) в процессе затягивания строп управления. Перед посадкой с целью уменьшения скорости приземления осуществляют "динамический подрыв" - интенсивное затягивание строп управления купола.
Известно устройство для измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе (АДТ) (патент РФ №2655713). Устройство содержит основание, две наклонные опорные балки, шарнирный механизм угла атаки, силовую стойку, тензовесы для измерения нагрузок на куполе и в коушах строп, платформу с узлами крепления основных строп.Устройство имеет принципиальное ограничение: купол парашюта зафиксирован в захватах устройства и не может свободно перемещаться в потоке АДТ в процессе затягивания строп управления. Известно также устройство для измерения аэродинамических характеристик планирующего парашюта в АДТ (патент РФ №2072947). Устройство, содержащее опорную балку и верхние тензовесы, на опорной балке укреплены верхние тензовесы с рамой и нижние тензовесы с шарнирным устройством, к внешней детали которого крепятся силовые стропы парашюта, а внутренняя деталь через нижние тензовесы укреплена на опорной балке. Оно позволяет определять статические аэродинамические характеристики, и не приспособлено для измерения нагрузок в процессе затягивания строп управления.
Известен выбранный в качестве прототипа стенд свободной балансировки (ССБ) ЦАГИ для определения балансировочных характеристик планирующих парашютов («Определение характеристик планирующего парашюта в аэродинамической трубе». А.Н. Свириденко, А.И. Сойнов, Н.В. Титоренко. Труды ЦАГИ, Вып.№2766, 2017 г.). Он состоит из балки (основание), на которой на необходимой поперечной базе закреплены два двухстепенных шарнира, связанных с однокомпонентными тензовесами. Ориентация тензовесов определяется с помощью датчиков углов тангажа и крена. Стропы управления монтируются вместе с основными стропами к узлам крепления и их положение меняется вручную после остановки АДТ. В потоке АДТ парашют может свободно перемещаться, принимая балансировочное положение, определяемое скоростью потока и величиной затягивания строп управления. С помощью стенда ССБ невозможно определять динамические характеристики ПП в процессе интенсивного затягивания строп управления, так как устройство не приспособлено для использования механизмов для затягивания строп управления, отсутствуют средства для измерения усилий в стропах управления, а также средства для определения величины и скорости перемещения строп управления.
Настоящее изобретение направлено на решение задачи определения аэродинамических нагрузок парашюта в процессе интенсивного затягивания строп управления ("динамическом подрыве" купола) и изменения ориентации купола парашюта в потоке АДТ (определение динамических характеристик). Из-за уменьшения длины строп управления увеличивается кривизна профиля. При этом сопротивление и подъемная сила значительно увеличиваются. Этот эффект при интенсивном затягивании строп управления используется для мягкого приземления груза или парашютиста.
Для выбора оптимального закона управления - перемещения строп управления по времени для гашения скорости необходимо знать величину сил, которые реализуются на крыле в процессе затягивания строп управления.
Предлагаемое устройство позволяет решить задачу определения динамических нагрузок планирующего парашюта в аэродинамической трубе при интенсивном затягивании строп управления и обеспечивает получение технического результата, заключающегося в расширении функциональных возможностей и повышении точности определения динамических нагрузок, а именно:
- возможность определения нестационарной аэродинамической нагрузки, действующей на основные стропы парашюта в процессе интенсивного затягивания строп управления с помощью лебедок на различную величину с различной скоростью;
- возможность определения нагрузок в стропах управления при их интенсивном затягивании;
- возможность регистрации угловых параметров движения парашюта в процессе затягивания строп управления;
- повышение точности измерения величины и скорости перемещения строп управления при интенсивном их затягивании.
Технический результат достигается тем, что предлагаемое устройство для определения нагрузок планирующего парашюта при затягивании строп управления в аэродинамической трубе, содержащее основание, узлы крепления основных строп, тензовесы, шарниры с датчиками углов тангажа и крена и тем, что на основании шарнирно закреплена платформа с размещенными на ней механизмами изменения длины строп управления, между платформой и узлами крепления основных строп установлены независимые друг от друга измерительные блоки определения векторов сил натяжения основных строп.
Технический результат достигается также тем, что каждый независимый измерительный блок определения вектора силы натяжения основных строп содержит, как минимум, тензовесы и датчики углов крена и тангажа.
Технический результат достигается также тем, что тензовесы однокомпонентные.
Технический результат достигается также тем, что тензовесы соединены с платформой шарнирами крена и тангажа.
Технический результат достигается также тем, что платформа соединена с основанием шарниром угла курса с датчиком угла курса.
Технический результат достигается также тем, что механизмы изменения длины строп управления снабжены таймером, задатчиком угловой скорости вращения и реверсивным механизмом.
Технический результат достигается также тем, что в стропах управления установлены однокомпонентные тензовесы.
Технический результат достигается также тем, что в стропы управления вмонтированы независимые измерительные блоки определения величины и скорости перемещения строп управления.
Технический результат достигается также тем, что каждый независимый измерительный блок определения величины и скорости перемещения стропы управления содержит, как минимум, магнитные метки, нанесенные на стропу управления с постоянным шагом, размещенную на платформе катушку индуктивности, сквозь которую проходит стропа управления, и регистрирующую аппаратуру.
Технический результат достигается также тем, что в качестве механизмов изменения длины строп управления применены лебедки.
Перечень фигур:
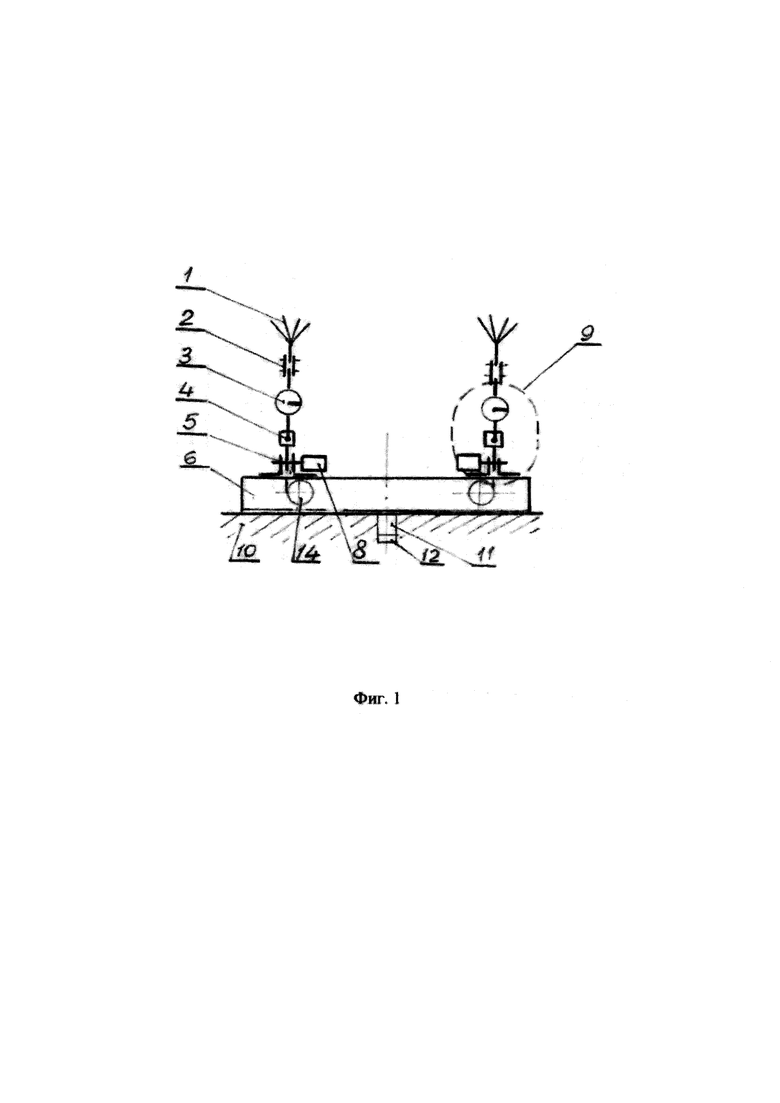
Фиг. 1 Схема предлагаемого устройства (вид по потоку АДТ)
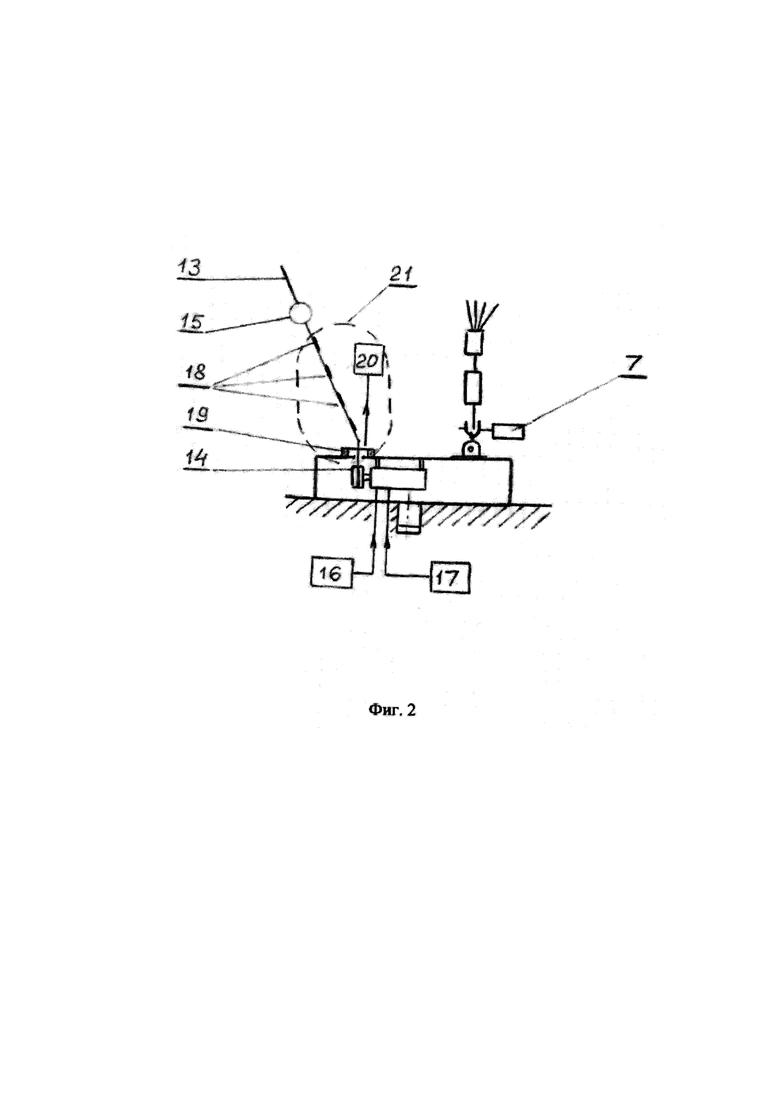
Фиг. 2 Схема предлагаемого устройства (вид сбоку)
В предложенном устройстве основные стропы 1 ПП посредством двух узлов крепления 2 соединены с тензовесами 3, которые, в свою очередь, через шарниры крена 4 и тангажа 5 соединены с платформой 6.
Тензовесы 3 могут быть однокомпонентными. Оси шарниров крена и тангажа соединены с датчиками этих углов 7 и 8 соответственно. Тензовесы 3, датчики углов крена 7 и тангажа 8 образуют два независимых друг от друга измерительных блока 9 определения вектора силы натяжения основных строп 1 парашюта. Платформа 6 соединена с основанием 10 шарниром курса 11 с датчиком угла курса 12. Две стропы управления 13 соединены с валами двух лебедок 14, установленных под платформой 6. Лебедки 14 снабжены реверсивным механизмом (не показан) и смещены по потоку относительно измерительных блоков 9. В каждую стропу управления 13 вмонтированы однокомпонентные тензовесы 15. Каждая лебедка 14 запитана от источника напряжения (не показан) через таймер 16 и задатчик угловой скорости вращения 17. На стропах управления 13 между лебедками 14 и тензовесами 15 закреплены магнитные метки 18 с постоянным шагом (0,01 - 0,1 м). Стропы управления 13 проходят через катушки индуктивности 19, закрепленные на платформе 6 и включенные в цепь регистрирующей аппаратуры 20. Магнитные метки 18, катушки индуктивности 19 и регистрирующая аппаратура образуют два измерительных блока 21 определения величины и скорости перемещения строп управления 13.
Работает изобретение следующим образом.
В пробном пуске АДТ проводится регулировка начального положения левой и правой стропы управления 13. Их положение должно быть симметричным, они не должны иметь слабины и не должны быть затянуты. После регулировки и выхода на расчетную скорость АДТ включаются системы регистрации параметров и по сигналу с пульта управления (не показан) лебедками 14 через таймер 16 и задатчик угловой скорости 17 подается питание на лебедки 14. При вращении валов лебедок 14 длины строп управления 13 уменьшаются, профиль парашюта увеличивает свою кривизну, возникает момент тангажа, направленный на кабрирование, и парашют перебалансируется - увеличивает свой угол атаки, переходя от начального балансировочного угла атаки к новому, соответствующему укороченным стропам управления 13 (и даже переходя его в силу набранной инерции). Регистрируются (по времени) нагрузки и углы ориентации векторов сил натяжения основных строп 1 с помощью измерительных блоков 9: усилия - тензовесами 3 в левом и правом бортах, углы тангажа - датчиками углов тангажа 8, углы крена датчиками угла 7. Регистрируются усилия в стропах управления - тензовесами 15 и угол курса датчиком угла курса 12. При больших углах крена и курса опыт повторяется. В обработку идут только пуски с небольшими углами крена и курса, так как исследуются нагрузки в продольном канале, боковые нагрузки исключаются. Регистрируются также: время работы лебедок 14, их угловые скорости вращения, величины скорости и перемещений строп управления 13 с помощью измерительных блоков 21 и системы магнитных меток 18, катушек индуктивности 19 и регистрирующей аппаратуры 20. Далее стропы управления 13 возвращают в исходное положение, используя реверсивный механизм лебедок 14, и меняют условия опыта.
Полученные экспериментальные данные о нагрузках при интенсивном затягивании строп управления используются затем в расчетах динамики движения системы груз - парашют. При определении суммарной аэродинамической нагрузки планирующего парашюта с учетом силы натяжения строп управления используется видеосъемка (методом видеограммометрии). Из анализа результатов расчета выбираются оптимальные варианты перемещения строп управления 13, наиболее существенно снижающие вертикальную скорость объекта или работу привода управления (лебедок 14).
Совокупность существенных признаков предложенного технического решения обеспечивает выполнение поставленных задач и достижение требуемого технического результата. Изобретение реализовано в конструкции и проходит испытания в натурной АДТ ЦАГИ.
Перечень позиций
1 - основные стропы
2 - узел крепления основных строп
3 - тензовесы
4 - шарнир крена
5 - шарнир тангажа
6 - платформа
7 - датчик угла крена
8 - датчик угла тангажа
9 - измерительный блок вектора силы натяжения основных строп
10 - основание
11 - шарнир курса
12 - датчик угла курса
13 - стропа управления
14 - лебедка
15 - однокомпонентные тензовесы стропы управления
16 - таймер
17 - задатчик угловой скорости вращения
18 - магнитные метки
19 - катушка индуктивности
20 - регистрирующая аппаратура
21 - измерительный блок величины и скорости перемещения стропы управления
Изобретение относится к авиационной технике и предназначено для измерения аэродинамических нагрузок, действующих на планирующий парашют (ПП) в процессе интенсивного затягивания строп управления перед посадкой с целью уменьшения скорости приземления - "динамическом подрыве" купола. Устройство содержит основание, узлы крепления основных строп, тензовесы, шарниры с датчиками углов тангажа и крена. На основании шарнирно закреплена платформа с размещенными на ней механизмами изменения длины для стропы управления, между платформой и узлами крепления основных строп установлены независимые друг от друга измерительные блоки определения вектора силы натяжения основных строп. Технический результат заключается в расширении функциональных возможностей и повышении точности определения характеристик: возможность определения нестационарных нагрузок, действующих на парашют при затягивании строп управления, возможность регистрации угловых параметров движения парашюта, повышение точности измерения величины и скорости перемещения строп управления. 9 з.п. ф-лы, 2 ил.
1. Устройство для определения нагрузок планирующего парашюта в аэродинамической трубе, содержащее основание, узлы крепления основных строп, тензовесы, шарниры с датчиками углов тангажа и крена, отличающееся тем, что на основании шарнирно закреплена платформа с размещенными на ней механизмами изменения длины строп управления, между платформой и узлами крепления основных строп установлены независимые друг от друга измерительные блоки определения вектора силы натяжения основных строп.
2. Устройство по п. 1, отличающееся тем, что каждый независимый измерительный блок определения вектора силы натяжения основных строп содержит, как минимум, тензовесы и датчики углов крена и тангажа.
3. Устройство по п. 1, отличающееся тем, что тензовесы одонокомпонентные.
4. Устройство по п. 2, отличающееся тем, что тензовесы соединены с платформой шарнирами с датчиками углов крена и тангажа.
5. Устройство по п. 1, отличающееся тем, что платформа соединена с основанием шарниром с датчиком угла курса.
6. Устройство по п. 1, отличающееся тем, что механизмы изменения длины строп управления снабжены таймером, задатчиком угловой скорости вращения и реверсивным механизмом.
7. Устройство по п. 1, отличающееся тем, что в стропах управления установлены однокомпонентные тензовесы.
8. Устройство по п. 1, отличающееся тем, что в стропы управления вмонтированы независимые измерительные блоки определения величины и скорости перемещения строп управления.
9. Устройство по п. 8, отличающееся тем, что каждый независимый измерительный блок определения величины и скорости перемещения стропы управления содержит, как минимум, магнитные метки, нанесенные на стропу управления с постоянным шагом, размещенную на платформе катушку индуктивности, сквозь которую проходит стропа управления, и регистрирующую аппаратуру.
10. Устройство по п. 1, отличающееся тем, что в качестве механизмов изменения длины строп управления применены лебедки.
| "Определение характеристик планирующего парашюта в аэродинамической трубе" | |||
| А.Н | |||
| Свириденко, А.И | |||
| Сойнов, Н.В | |||
| Титоренко | |||
| Труды ЦАГИ, Вып | |||
| Электролитический способ выделения йода из йодосодержащих рассолов | 1925 |
|
SU2766A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ БОКОВЫХ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПЛАНИРУЮЩЕГО ПАРАШЮТА В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ | 1993 |
|
RU2072947C1 |
| Устройство для измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе, модель планирующего парашюта для испытаний в аэродинамической трубе, способ измерения аэродинамических характеристик планирующего парашюта в аэродинамической трубе | 2017 |
|
RU2655713C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ПЛАНИРУЮЩЕГО ПАРАШЮТА | 1993 |
|
RU2061629C1 |
| DE 4315250 A1, 10.11.1994. | |||

