Изобретение относится к авиационной технике и предназначено для измерения нестационарной аэродинамической силы, действующей на планирующий парашют (ПП) в процессе интенсивного затягивания строп управления с целью уменьшения скорости приземления. Эффект значительного увеличения подъемной силы и сопротивления при затягивании строп управления ПП используется в практике. Цель изобретения -определение аэродинамической силы, действующей на парашют при этом.
Известно выбранное в качестве аналога устройство для определения аэродинамических характеристик планирующего парашюта в аэродинамической трубе (патент РФ №2714529 от 08.04.2019 г. Г.П. Носков, А.Н. Свириденко, А.И. Сойнов). Устройство содержит основание, установленную на нем платформу, узлы крепления строп, лебедки строп управления, верхние и нижние тензовесы, шарниры тангажа и крена и датчики этих углов. Устройство позволяет определять лишь статические аэродинамические характеристики планирующего парашюта и не приспособлено для измерения нагрузок в процессе затягивания строп управления: купол парашюта зафиксирован в захватах устройства и не может перемещаться свободно в потоке аэродинамической трубы (АДТ).
Известно выбранное в качестве прототипа устройство для определения нагрузок планирующего парашюта в аэродинамической трубе (Патент РФ №2761121 от 27.12.2019 г. Г.П. Носков, А.Н. Свириденко, А.И. Сойнов). Устройство содержит основание с закрепленной на нем с помощью шарнира курса основной платформой с узлами крепления основных строп парашюта и лебедками, соединенными со стропами управления парашюта, а между основной платформой и узлами крепления основных строп установлены независимые измерительные блоки определения векторов сил натяжения основных строп, блоки состоят из однокомпонентных тензовесов, шарниров тангажа и датчиков углов тангажа. В стропах управления также установлены однокомпонентные весы. Шарнир курса снабжен датчиком курса. Устройство имеет недостатки. Во-первых, с его помощью невозможно измерить суммарную аэродинамическую силу парашюта при затягивании строп управления. А именно она влияет на скорость приземления и ее необходимо знать при выборе управления стропами. Чтобы определить расчетным путем суммарную аэродинамическую силу по полученным в эксперименте данным, необходимо складывать в каждый момент времени векторы сил натяжения в основных стропах и в стропах управления, определяя по видеосъемке, либо другим способом, переменные по времени углы между этими векторами в продольной и поперечной плоскостях для каждого из двух бортов. Видеосъемка в двух плоскостях должна проводиться синхронизированными видеокамерами. Это усложняет подготовку и проведение эксперимента, увеличивает время обработки данных, снижает точность получаемых характеристик, увеличивает стоимость эксперимента. Во-вторых, в креплении основной платформы к основанию отсутствуют шарнир крена и датчик этого угла, что снижает точность получаемых характеристик. Крен ПП может возникнуть из-за асимметрии в положении строп управления при работе лебедок, либо из-за геометрической или аэродинамической асимметрии консолей ПП. При больших (более 5 градусов) углах крена искажается форма купола ПП и результаты становятся некондиционными, поэтому датчик угла крена в эксперименте необходим для контроля получаемых результатов и исключения из обработки некондиционных опытов. Отсутствие шарнира крена может привести к перекосу купола относительно узлов крепления основных строп даже при небольших углах крена, что также снизит точность эксперимента.
Настоящее изобретение направлено на решение задачи измерения вектора суммарной аэродинамической силы при затягивании строп управления.
Задачей и техническим результатом устройства является:
- измерение суммарного вектора аэродинамической силы ПП при затягивании строп управления;
- уменьшение времени обработки данных эксперимента при определении вектора суммарной аэродинамической силы при затягивании строп управления;
- повышение точности эксперимента.
Технический результат достигается тем, что устройство для определения характеристик планирующего парашюта, содержащее основание с шарниром курса и датчиком угла курса, основную платформу с узлами крепления основных строп и лебедками строп управления, независимые измерительные блоки измерения вектора силы, состоящие из тензовесов, шарниров тангажа и датчиков угла тангажа и тем, что устройство снабжено дополнительной платформой, закрепленной на основании с помощью шарнира крена с датчиком угла крена и соединенной с основной платформой независимыми измерительными блоками измерения вектора суммарной аэродинамической силы парашюта.
Технический результат достигается также тем, что центр тяжести основной платформы с лебедками и узлами крепления основных строп совмещен с осью вращения нижних шарниров тангажа независимых измерительных блоков измерения вектора суммарной аэродинамической силы парашюта.
Технический результат достигается также тем, что лебедки соединены с основной платформой кронштейнами с механизмами регулировки расстояния между основной платформой и лебедками.
Технический результат достигается также тем, что лебедки снабжены противовесом.
Технический результат достигается также тем, что ось вращения шарнира курса отклонена от вертикали по потоку на угол, пропорциональный уменьшению аэродинамического качества парашюта при затягивании строп управления.
Перечень фигур:
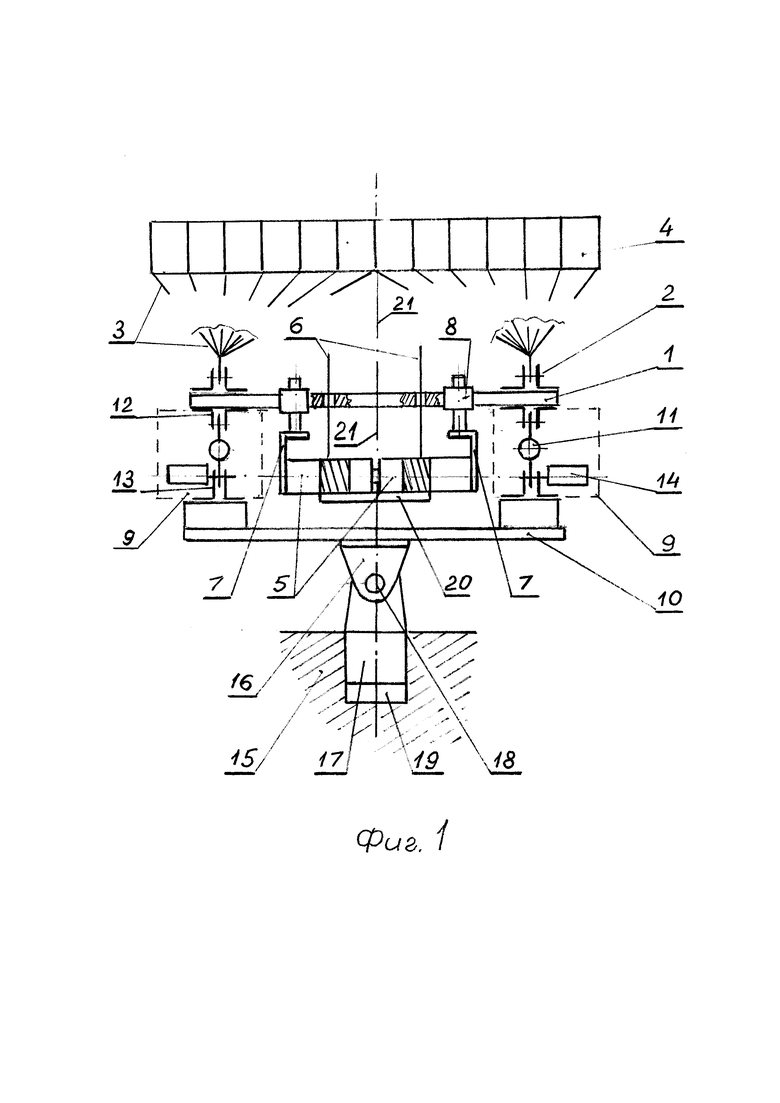
Фиг. 1. Схема предлагаемого устройства (вид по потоку АДТ).
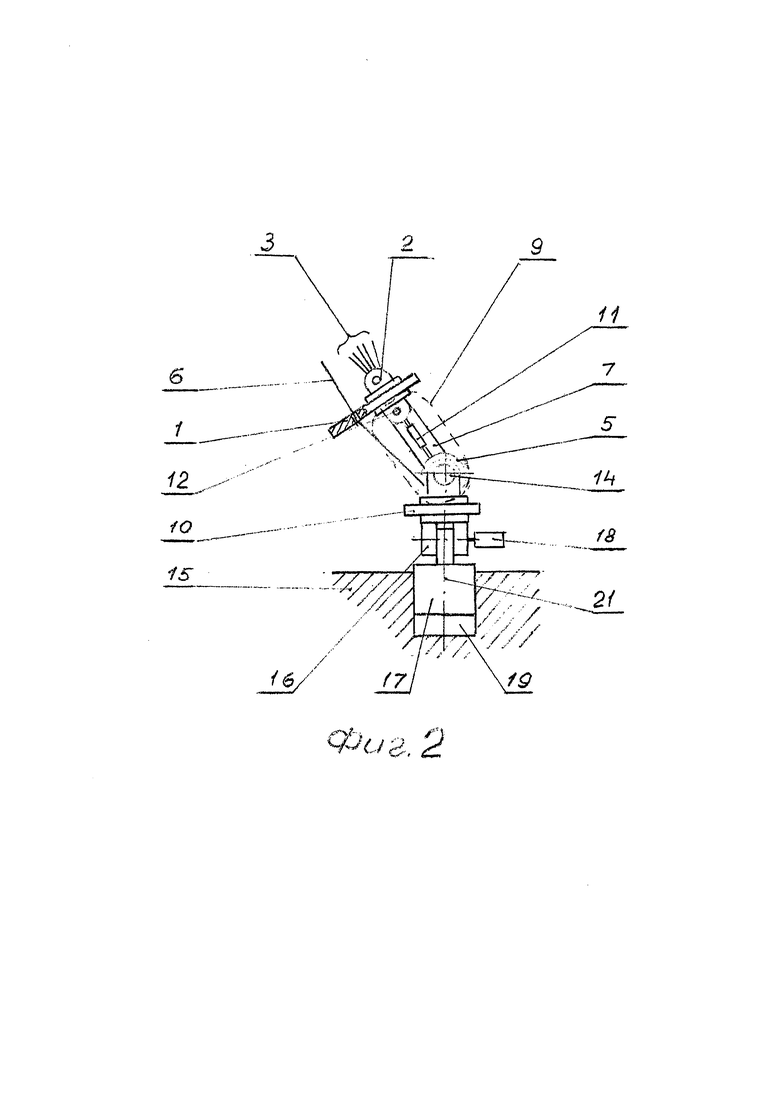
Фиг. 2. Схема предлагаемого устройства (вид сбоку).
Предлагаемое устройство состоит из основной платформы 1 с узлами крепления 2 основных строп 3 купола планирующего парашюта 4 и лебедками 5, размещенными под основной платформой 1 и соединенными со стропами управления 6 (фиг. 1). Лебедки 5 присоединены к основной платформе 1 кронштейнами 7 с механизмами регулировки 8 расстояния между лебедками 5 и основной платформой 1. Электродвигатели лебедок 5 подключены к пульту управления с задатчиком угловой скорости вращения и таймером (не показаны). Основная платформа 1 через независимые измерительные блоки 9 измерения суммарной аэродинамической силы планирующего парашюта 4 соединена с дополнительной платформой 10. Каждый независимый измерительный блок 9 состоит из однокомпонентных тензовесов 11, присоединенных с помощью верхних шарниров тангажа 12 к основной платформе 1, и с помощью нижних шарниров тангажа 13 к дополнительной платформе 10, и датчиков угла тангажа 14, установленных в осях нижних шарниров тангажа 13. Дополнительная платформа 10 соединена с основанием 15 шарнирами крена 16 и курса 17. В осях шарниров 16 и 17 установлены датчики угла крена 18 и угла курса 19 соответственно.
За счет того, что на основную платформу 1 передаются обе искомые нагрузки - от основных строп 3 через узлы крепления 2 и от строп управления - через лебедки 5, измерительные блоки 9, установленные между платформами 1 и 10, измеряют суммарную аэродинамическую нагрузку от купола 4, а не ее часть. Дополнительная платформа 10, являясь опорной базой для измерительных блоков 9, позволяет парировать небольшие углы крена и скольжения без искажения формы купола парашюта 4. Состав измерительных блоков 9 - тот же, что и у прототипа.
На лебедках 5 установлен противовес 20. Для уменьшения влияния веса основной платформы 1 на показания датчиков угла тангажа 14 центр тяжести основной платформы 1 с лебедками 5 и узлами крепления 2 совмещен с осью вращения нижних шарниров тангажа 13, для этого используются механизмы регулировки 8 кронштейнов 7 и противовес 20. Основная платформа 1 изготовлена из легких материалов (алюминиевый сплав, углепластик). Лебедки 5 снабжены механизмом реверса (не показан). Независимые измерительные блоки 9, датчики углов тангажа 14, крена 18 и курса 19 соединены электрически с информационно измерительной системой (ИИС) (не показана).
Для более полной передачи моментов крена и курса шарнирам 16 и 17 от парашюта 4 при возможном его крене или отклонении по курсу ось вращения 21 шарнира курса 17 отклонена в плоскости симметрии от вертикали по потоку на угол, пропорциональный смещению от вертикали вектора суммарной аэродинамической силы парашюта 4 при затянутых стропах управления 6, т.е. изменению его аэродинамического качества. Этот угол для испытываемого парашюта 4 определяется в предварительном эксперименте по показаниям датчиков угла тангажа 14. На фиг. 2 для упрощения ось 21 вращения шарнира курса 17 показана вертикальной.
Устройство функционирует следующим образом. Перед началом эксперимента в АДТ совмещают центр тяжести основной платформы 1 с лебедками 5 с осью вращения нижних шарниров тангажа 13. После наполнения купола парашюта 4 с отпущенными стропами управления 6 и выхода АДТ на заданную скорость потока с пульта управления (не показан) подается напряжение на электродвигатели лебедок 5. Валы лебедок 5, вращаясь с заданной скоростью в течение заданного времени, уменьшают длину строп управления 6. Задняя кромка купола парашюта 4 отклоняется вниз, создавая дополнительное сопротивление, подъемную силу и кабрирующий момент, под действием которого купол парашюта 4 увеличивает свой угол атаки, смещаясь по потоку. Основная платформа 1 с измерительными блоками 9 отслеживает это смещение вращением в осях нижних шарниров тангажа 13, что регистрируется датчиками угла тангажа 14. Изменение суммарной аэродинамической силы купола парашюта 4 регистрируют с помощью ИИС независимые измерительные блоки 9 с помощью тензовесов 11 и датчиков угла тангажа 14. ИИС регистрирует также углы крена и курса с помощью датчиков углов 18 и 19 соответственно. По инерции купол парашюта 4 переходит балансировочный угол атаки, соответствующий затянутым стропам управления 6, и после колебаний занимает новое положение. После окончания регистрации ИИС этого процесса скорость потока сбрасывается до 0, стропы управления 6 возвращают в исходное положение реверсивным механизмом лебедок 5. Опыт повторяют, изменяя величину и скорость перемещения строп управления 6 и/или скорость потока АДТ. При больших углах крена и отклонения по курсу эксперимент не считается достоверным. Полученные в эксперименте данные о суммарной аэродинамической силе используются в расчетах динамики движения системы «груз-парашют». Из анализа результатов расчета выбираются оптимальная величина перемещения строп управления 6 и оптимальная скорость их перемещения, максимально снижающие вертикальную скорость объекта.
Непосредственное измерение вектора суммарной аэродинамической силы парашюта, устраняя необходимость сложения векторов сил натяжения основных строп и строп управления, уменьшает время обработки данных, повышает точность эксперимента. Контроль величины угла крена с помощью датчика угла крена 18 и угла курса с помощью датчика угла курса 19 необходим для исключения недостоверных опытов из обработки и повышения точности эксперимента. Наличие шарниров крена 16 и курса 17, устраняя перекос купола парашюта 4 и стропной системы относительно узлов крепления 2 основных строп 3 в пусках с небольшими углами крена и курса (меньше 5 градусов), повышает точность. Отклонение оси вращения шарнира курса 17 от вертикали по потоку, в сторону движения купола парашюта 4 повышает эффективность шарниров крена 16 и курса 17.
Таким образом, заявленная совокупность признаков необходима и достаточна для достижения технического результата: определения суммарной аэродинамической силы при затягивании строп управления, повышения точности эксперимента, уменьшения времени обработки данных эксперимента.
Перечень позиций
1 - основная платформа
2 - узлы крепления основных строп
3 - основные стропы
4 - купол планирующего парашюта
5 - лебедки
6 - стропы управления
7 - кронштейн
8 - механизм регулировки
9 - независимые измерительные блоки измерения суммарной аэродинамической силы
10 - дополнительная платформа
11 - тензовесы
12 - верхний шарнир тангажа
13 - нижний шарнир тангажа
14 - датчик угла тангажа
15 - основание
16 - шарнир крена
17 - шарнир курса
18 - датчик угла крена
19 - датчик угла курса
20 - противовес
21 - ось вращения шарнира курса.
Изобретение относится к авиационной технике и предназначено для определения в аэродинамической трубе нестационарной аэродинамической силы планирующего парашюта при интенсивном затягивании строп управления. Устройство содержит основание с шарниром курса и датчиком курса, основную платформу с узлами крепления основных строп и лебедками строп управления, тензовесы, шарниры тангажа. При этом основная платформа снабжена дополнительной платформой, соединенной с основанием шарниром крена с датчиком угла крена, а между платформами установлены независимые измерительные блоки измерения вектора суммарной аэродинамической силы парашюта. Технический результат заключается в возможности измерения вектора суммарной аэродинамической силы парашюта при затягивании строп управления с различной скоростью на разную величину, повышении точности определения характеристик и уменьшении времени обработки данных эксперимента. 4 з.п ф-лы, 2 ил. 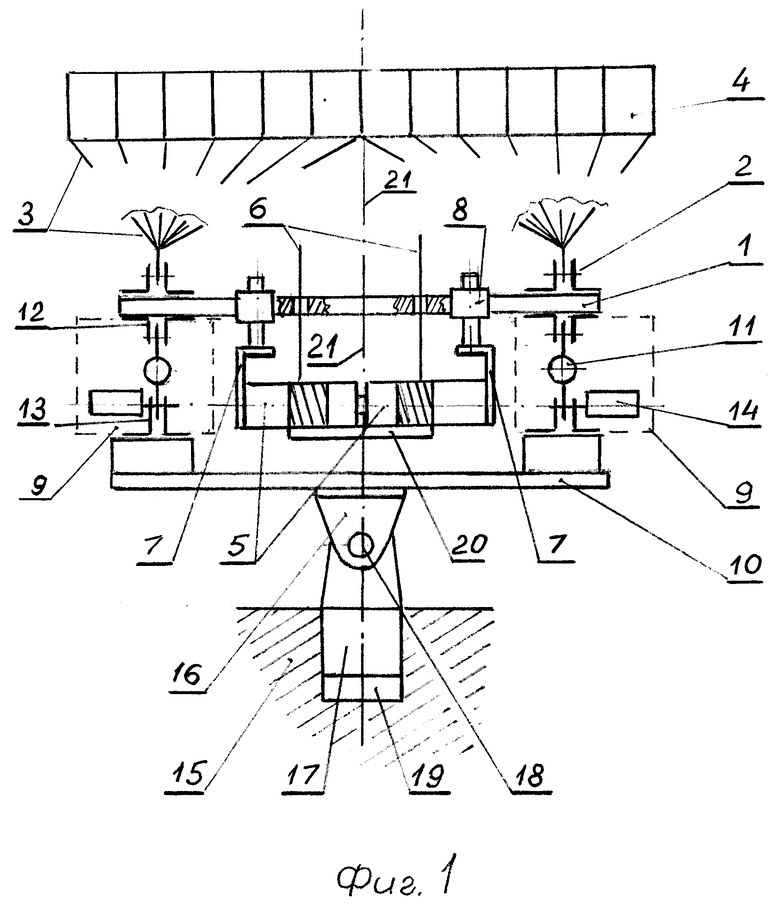
1. Устройство для определения нагрузок планирующего парашюта в аэродинамической трубе, содержащее основание с шарниром курса и датчиком угла курса, основную платформу с узлами крепления основных строп и лебедками строп управления, независимые измерительные блоки измерения вектора силы, состоящие из тензовесов, шарниров тангажа и датчиков угла тангажа, отличающееся тем, что устройство снабжено дополнительной платформой, закрепленной на основании с помощью шарнира крена с датчиком угла крена и соединенной с основной платформой независимыми измерительными блоками измерения суммарного вектора аэродинамической силы парашюта.
2. Устройство по п. 1, отличающееся тем, что центр тяжести основной платформы с лебедками и узлами крепления основных строп совмещен с осью вращения нижних шарниров тангажа измерительных блоков измерения вектора суммарной аэродинамической силы парашюта.
3. Устройство по п. 1, отличающееся тем, что лебедки соединены с основной платформой кронштейнами с механизмами регулировки расстояния между основной платформой и лебедками.
4. Устройство по п. 1, отличающееся тем, что лебедки снабжены противовесом.
5. Устройство по п. 1, отличающееся тем, что ось вращения шарнира курса отклонена от вертикали по потоку на угол, пропорциональный уменьшению аэродинамического качества парашюта при затягивании строп управления.

