[Область техники, к которой относится изобретение]
[0001]
Настоящее изобретение относится к транспортирующему устройству для подъема/опускания контейнера, предназначенного для транспортировки изделий, которое включает в себя, по меньшей мере, два набора средств удерживания контейнера, которые удерживают контейнер, предназначенный для транспортировки изделий, с обеих сторон для подъема/опускания контейнера.
[Предшествующий уровень техники]
[0002]
Для данного типа контейнера, предназначенного для транспортировки изделий, в частности, для большого контейнера с открывающейся/закрывающейся дверцей на передней поверхности в качестве подъемного/опускного транспортирующего устройства известно подъемное/опускное транспортирующее устройство, в котором, как описано в патентном литературном источнике 1, подъемный/опускной элемент, который подвешен с возможностью свободного подъема/опускания, предусмотрен в перемещающемся элементе типа мостового крана и в котором сцепляющиеся крепежные элементы, которые предусмотрены с нижней стороны подъемного/опускного элемента и выполнены с возможностью присоединения к верхней поверхности большого контейнера, или крюк, который свободно сцепляется и отцепляется посредством зазора, находящегося ниже нижней поверхности большого контейнера, выполнены так, что большой контейнер может быть подвешен с нижней стороны подъемного/опускного элемента. В конфигурации, описанной в патентном литературном источнике 1, необходимым условием является то, что сцепляющиеся крепежные элементы, предназначенные для крепления к верхней поверхности большого контейнера, служащего в качестве транспортируемого объекта, должны быть выполнены так, чтобы они выступали, или то, что зазор должен быть образован ниже нижней поверхности большого контейнера, и, таким образом, контейнер малого размера или тому подобный предмет, который может быть поднят и перенесен посредством обеих рук и который выполнен из пластика с открытой верхней стороной, не может быть использован в состоянии «как есть» в качестве транспортируемого объекта. Для решения данной проблемы заявитель по настоящей заявке подал заявку на патент (заявку на патент Японии № 2014-122242) на изобретение, которое будет описано ниже (в дальнейшем данная заявка названа неопубликованной патентной заявкой).
[0003]
В частности, в транспортирующем устройстве, предназначенном для подъема/опускания контейнеров и описанном в неопубликованной патентной заявке, указанной выше, контейнер малого размера, который может быть поднят и перенесен посредством обеих рук и который выполнен из пластика с открытой верхней стороной, может быть использован в состоянии «как есть» в качестве транспортируемого объекта, при этом предусмотрены, по меньшей мере, два набора средств удерживания контейнера, которые обеспечивают подъем/опускание контейнера малого размера посредством его удерживания с обеих сторон, и данные средства удерживания контейнера поднимаются/опускаются совместно друг с другом и выполнены с конфигурацией, обеспечивающей возможность их свободного приближения к контейнеру малого размера или удаления от контейнера малого размера в горизонтальном направлении вперед-назад. В частности, два, передний и задний, наборы средств удерживания контейнера предусмотрены так, чтобы они соответствовали как передней, так и задней сторонам контейнера малого размера, и оба набора средств удерживания контейнера включают в себя удерживающее приспособление, которое обеспечивает удерживание боковой поверхности контейнера малого размера, и два, левое и правое, установочные приспособления, которые выполнены с возможностью свободного приближения друг к другу или удаления друг от друга в горизонтальном направлении влево/вправо и которые прилегают как к левым, так и к правым угловым частям боковой поверхности контейнера малого размера для установки контейнера малого размера в заданном положении. Контейнер малого размера, подлежащий манипуляциям, включает в себя: выступающую нижнюю часть, которая вставляется во внутреннее пространство верхней концевой открытой части нижнего контейнера малого размера во время штабелирования контейнеров, и ребро жесткости, которое проходит горизонтально как на передней, так и на задней боковых поверхностях контейнера малого размера, удерживаемых удерживающим приспособлением, и удерживающее приспособление включает в себя большое число штырей, которые входят под нижнюю сторону ребер жесткости как на передней, так и на задней боковых поверхностях контейнера малого размера и которые выполнены с возможностью свободного выдвигания и отвода.
[Перечень ссылок]
[Патентная литература]
[0004]
[Патентный литературный источник 1] Публикация нерассмотренной заявки на патент Японии № Н06-115608
[Сущность изобретения]
[Проблемы, подлежащие решению посредством изобретения]
[0005]
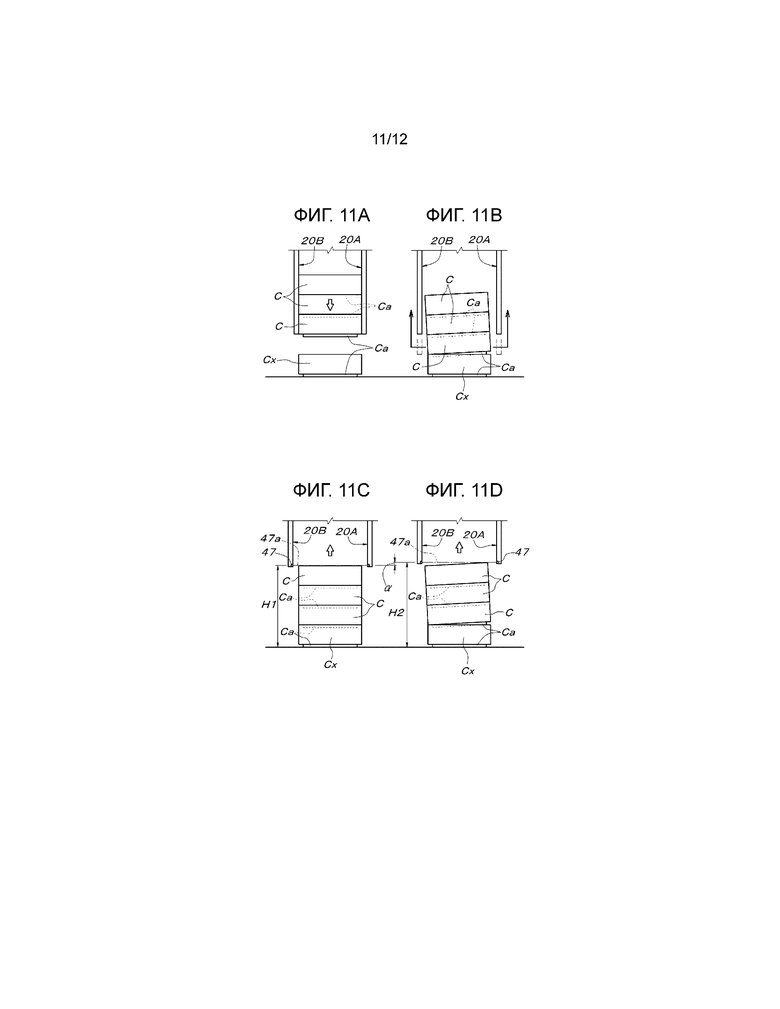
Рассматривается случай, в котором транспортирующее устройство, предназначенное для подъема/опускания контейнеров и описанное в неопубликованной патентной заявке, указанной выше, осуществляет транспортирование контейнера малого размера (в дальнейшем называемого просто контейнером), выполненного с описанной выше конфигурацией, и устанавливает его в штабель в заданном положении, и, когда между нижним перемещенным контейнером, подлежащим штабелированию, и верхним контейнером, который должен быть установлен в штабель на нем, образуется смещение, которое превышает зазор в горизонтальном направлении между выступающей нижней частью и верхней концевой открытой частью как в верхнем, так и в нижнем контейнерах, как показано на фиг.11В, выступающая нижняя часть и верхняя концевая открытая часть на обоих контейнерах не устанавливаются друг относительно друга надлежащим образом, в результате чего контейнеры будут размещены в штабеле в таком неустойчивом положении, что верхний контейнер наклоняется относительно нижнего перемещенного контейнера. Если оставить такое ненадлежащее состояние при штабелировании таким, как есть, возникает неудобная ситуация, при которой контейнеры падают под действием внешней силы, такой как незначительная вибрация, или при которой при последующем транспортировании всех штабелированных/расположенных друг над другом контейнеров или части штабелированных контейнеров не будет выполняться надлежащее удерживание. Само собой разумеется, вышеописанная ненормальная ситуация, в которой контейнер, опускаемый в заданное положение, наклоняется, имеет место не только в случае, когда как верхний, так и нижний контейнеры, выступающая нижняя часть и верхняя концевая открытая часть которых вставляются друг в друга, размещены в штабеле, но и также, например, в случае, когда контейнер опускают на посторонний предмет, который неожиданным образом оказался на поверхности, образующей опору для контейнера, такой как поверхность пола, что также может вызвать аналогичную неудобную ситуацию.
[Средства решения проблем]
[0006]
В соответствии с настоящем изобретением предложено подъемное/опускное транспортирующее устройство для контейнера, предназначенного для транспортировки изделий, которое может обеспечить решение традиционных проблем, описанных выше, и для облегчения понимания взаимосвязи с примером, который будет описан позднее, ссылочные позиции, используемые в описании данного примера, показаны в скобках. В транспортирующем устройстве (2) для подъема/опускания контейнера, предназначенного для транспортировки изделий, которое включает в себя, по меньшей мере, два набора средств (20А, 20В) удерживания контейнера, которые удерживают контейнер (С), предназначенный для транспортировки изделий, с обеих сторон для подъема/опускания контейнера (С), предназначенного для транспортировки изделий, и в котором средства (20А, 20В) удерживания контейнера поднимаются/опускаются совместно друг с другом и выполнены с возможностью свободного приближения к контейнеру (С) или удаления от контейнера (С) в горизонтальном направлении вперед-назад, датчик (47), предназначенный для определения высоты верхнего конца перемещенного контейнера (С), когда контейнер (С) поднят после его перемещения, прикреплен к месту, находящемуся рядом с нижним концом каждого из средств (20А, 20В) удерживания контейнера, и выполняется операция сравнения между измеренным значением высоты верхнего конца перемещенного контейнера, которое определено датчиком (47), и нормальным значением высоты верхнего конца перемещенного контейнера, которое рассчитано на основе высоты контейнера (С), который подвергается манипуляциям, для определения отклонения от нормального пространственного положения перемещенного контейнера (С).
[0007]
«Контейнер», упоминаемый в настоящем изобретении, включает не только контейнер малого размера с его открытой верхней стороной, который образован из пластика и который будет описан позднее в примере, но также и различные типы контейнеров, в которых содержатся изделия различных типов для их транспортировки и которые имеют разные формы, конструкции, материалы, размеры и тому подобное, такие как коробчатая форма и тарельчатая форма и тому подобное, и выполнены с возможностью штабелирования, и средства (20А, 20В) удерживания контейнеров выполнены с конфигурацией, соответствующей форме и конструкции «контейнера».
[Эффекты от изобретения]
[0008]
В транспортирующем устройстве для подъема/опускания контейнера, предназначенного для транспортировки изделий, в соответствии с настоящим изобретением в том случае, когда контейнер, удерживаемый средствами удерживания контейнера, опускают в заданное положение, средства удерживания контейнера опускаются до высоты, на которой удерживаемый контейнер опирается на опорную поверхность для контейнера или на нижний перемещенный контейнер, после этого средства удерживания контейнера раскрываются, в результате чего удерживание контейнера прекращается, и затем средства удерживания контейнера, находящиеся в раскрытом состоянии, поднимаются до высоты, которая больше высоты, по меньшей мере, верхнего конца перемещенного контейнера, в результате чего в процессе выполнения операции осуществляется переход к операции перемещения последующего контейнера. На завершающем этапе, на котором средства удерживания контейнера, находящиеся в раскрытом состоянии, поднимаются до высоты, которая больше высоты, по меньшей мере, верхнего конца перемещенного контейнера, при датчике, переключенном во включенное состояние, существует возможность определения высоты верхнего конца перемещенного контейнера. Например, передаваемые импульсы от кодового датчика положения, соединенного с электродвигателем, который обеспечивает приведение в движение средств удерживания контейнера для их подъема/опускания, подсчитываются и используются в качестве информации о текущей высоте средств удерживания контейнера, и, таким образом, существует возможность получения измеренного значения высоты верхнего конца перемещенного контейнера из информации о текущей высоте средств удерживания контейнера при приеме сигнала определения высоты верхнего конца контейнера, которая определяется датчиком. С другой стороны, данные о высоте контейнера, подвергаемого манипуляциям посредством транспортирующего устройства, предназначенного для подъема/опускания контейнера, заданы ранее, и, таким образом, существует возможность получения - исходя из заданного значения - высоты (общей высоты во время штабелирования) контейнера, перемещенного в заданное положение, в качестве нормального значения высоты верхнего конца перемещенного контейнера, которое соответствует подсчитанному количеству импульсов, переданных от кодового датчика положения, соединенного с электродвигателем, который обеспечивает приведение в движение средств удерживания контейнера для их подъема/опускания. Следовательно, осуществляется вычисление разности нормального значения высоты верхнего конца перемещенного контейнера и измеренного значения высоты верхнего конца перемещенного контейнера, и, таким образом, существует возможность определения того, что в том случае, когда данная разность находится в заданных допустимых пределах, штабелирование является нормальным, в то время как в том случае, когда разность превышает заданные допустимые пределы, штабелирование является ненормальным.
[0009]
Следовательно, в любом случае, когда контейнер, перемещаемый посредством транспортирующего устройства для подъема/опускания контейнера, предназначенного для транспортировки изделий, опускают на контейнер, перемещенный в заданное положение, и/или на опорную поверхность для контейнера, такую как пол, в том случае, когда контейнер, опущенный в заданное положение, будет опираться надлежащим образом на опорную поверхность для контейнера в горизонтальном положении и высота контейнера (общая высота во время штабелирования) будет равна нормальному значению высоты верхнего конца перемещенного контейнера, которое могло быть получено ранее, или соответствует погрешности, находящейся в допустимых пределах, не будет определено, что штабелирование является ненормальным. Однако в том случае, когда выступающая нижняя часть контейнера, опущенного в заданное положение, не будет вставлена надлежащим образом в верхнюю концевую открытую часть нижнего перемещенного контейнера, или в том случае, когда контейнер опускают на посторонний предмет, который неожиданным образом оказался на опорной поверхности для контейнера, поскольку опущенный контейнер наклоняется таким образом, что высота его верхнего конца находится за пределами допустимого интервала, будет определено, что штабелирование является ненормальным. Несмотря на то, что управление, которое осуществляется автоматически на основе данного определения ненормального штабелирования, не имеет конкретных ограничений, при данном обнаружении ненормального штабелирования могут быть выполнены, например, следующие операции управления: выполняется уведомление о возникновении ненормального штабелирования посредством использования лампы или аварийной сигнализации; все последующие операции складирования и извлечения, выполняемые транспортирующим устройством 2, предназначенным для подъема/опускания контейнера, которое обнаруживает данное ненормальное штабелирование, прекращаются, или прекращается только размещение другого контейнера поверх перемещенного контейнера, для которого было обнаружено ненормальное штабелирования, или только операция его удаления, в то время как продолжаются операции складирования и извлечения контейнера для другого места, и т.д.
[0010]
Как описано в неопубликованной патентной заявке, указанной ранее, два, передний и задний, наборы средств (20А, 20В) удерживания контейнера предусмотрены с обеспечением их соответствия как передней, так и задней сторонам контейнера (С), оба средства (20А, 20В) удерживания контейнера включают в себя: удерживающие приспособления (21b), которые обеспечивают удерживание боковой поверхности контейнера, и пару левых и правых установочных приспособлений (22а, 22b), которые выполнены с возможностью свободного приближения друг к другу или удаления друг от друга в боковом горизонтальном направлении и которые прилегают как к левым, так и к правым угловым частям боковой поверхности контейнера для установки контейнера (С) в заданном положении, и датчик (47) образован посредством излучателя (49а) света, который прикреплен к месту, находящемуся рядом с удерживающим приспособлением (21b) одного (20А) из средств удерживания контейнера, и приемника (49b) света, который прикреплен к месту, находящемуся рядом с удерживающим приспособлением (21b) другого средства (20В) удерживания контейнера. В данной конфигурации в отличие от случая, в котором средства удерживания контейнера образованы с четырьмя удерживающими приспособлениями, которые приближаются к четырем углам контейнера или удаляются от четырех углов контейнера в горизонтальном направлении, датчик может опираться на удерживающие приспособления, которые выполняют только движение подъема/опускания совместно друг с другом без перемещения вбок в боковом горизонтальном направлении, в результате чего существует возможность простого использования датчика, образованного посредством излучателя света и приемника света.
[Краткое описание чертежей]
[0011]
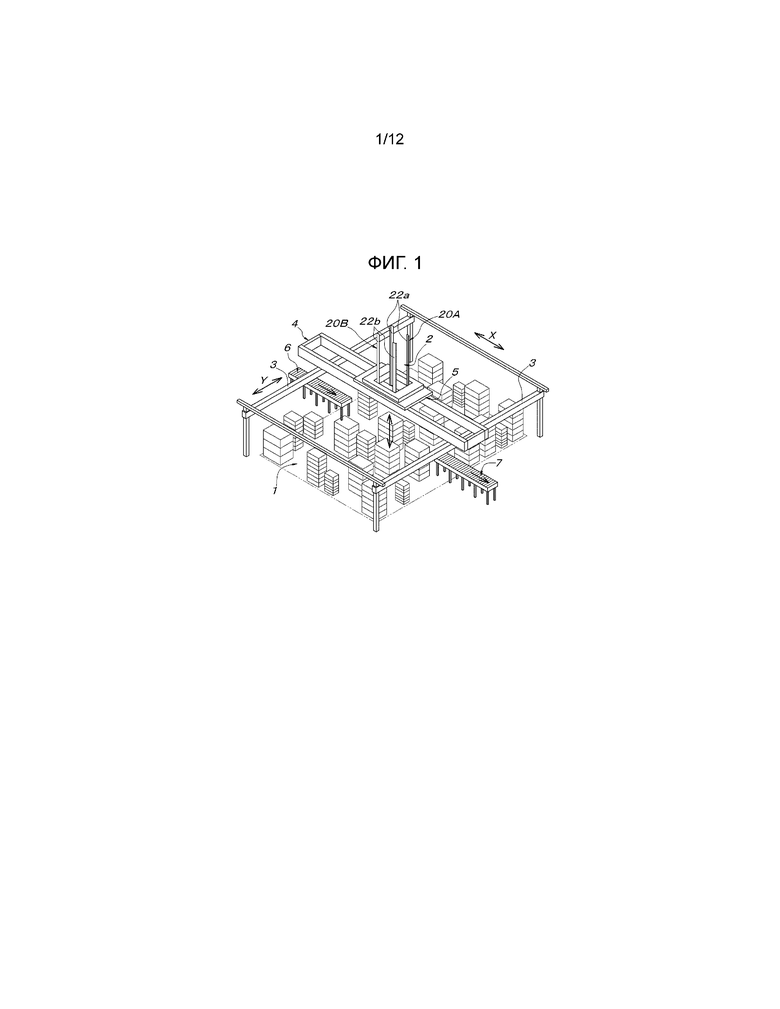
[Фиг.1] Фиг.1 представляет собой вид в перспективе, показывающий общую конфигурацию всего складского сооружения, в котором используется транспортирующее устройство для подъема/опускания контейнера, предназначенного для транспортировки изделий, (в дальнейшем кратко называемого контейнером) в соответствии с настоящим изобретением.
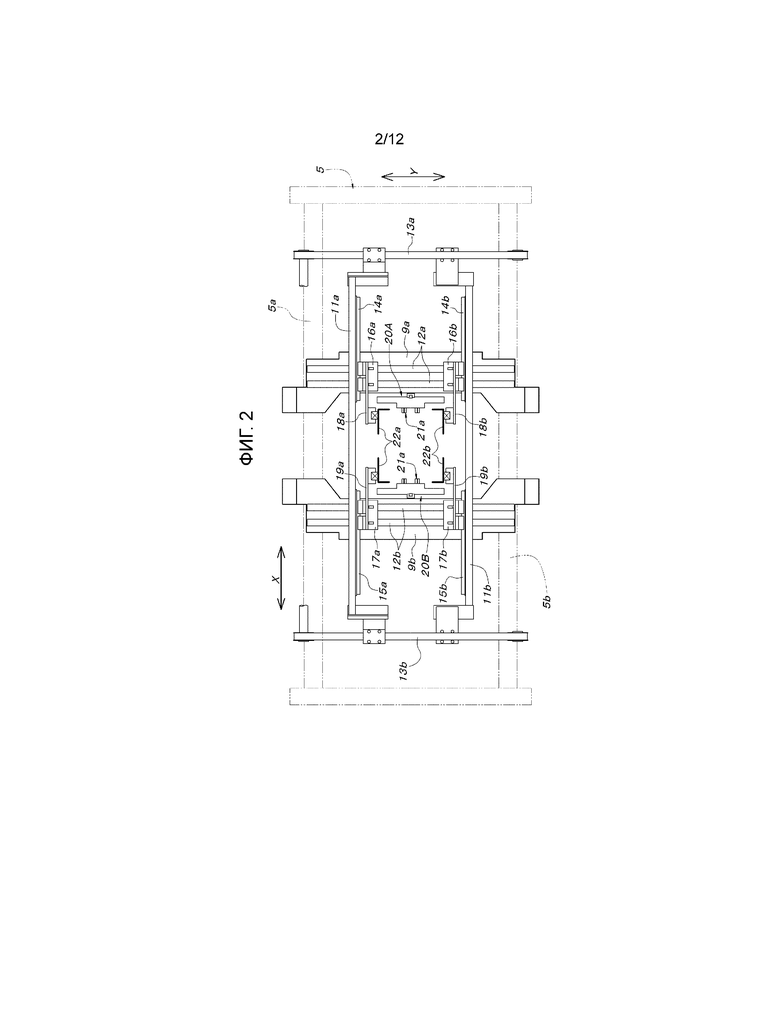
[Фиг.2] Фиг.2 представляет собой вид в плане, показывающий обеспечивающий перемещение в направлении Y, приводной механизм в транспортирующем устройстве, предназначенном для подъема/опускания контейнера.
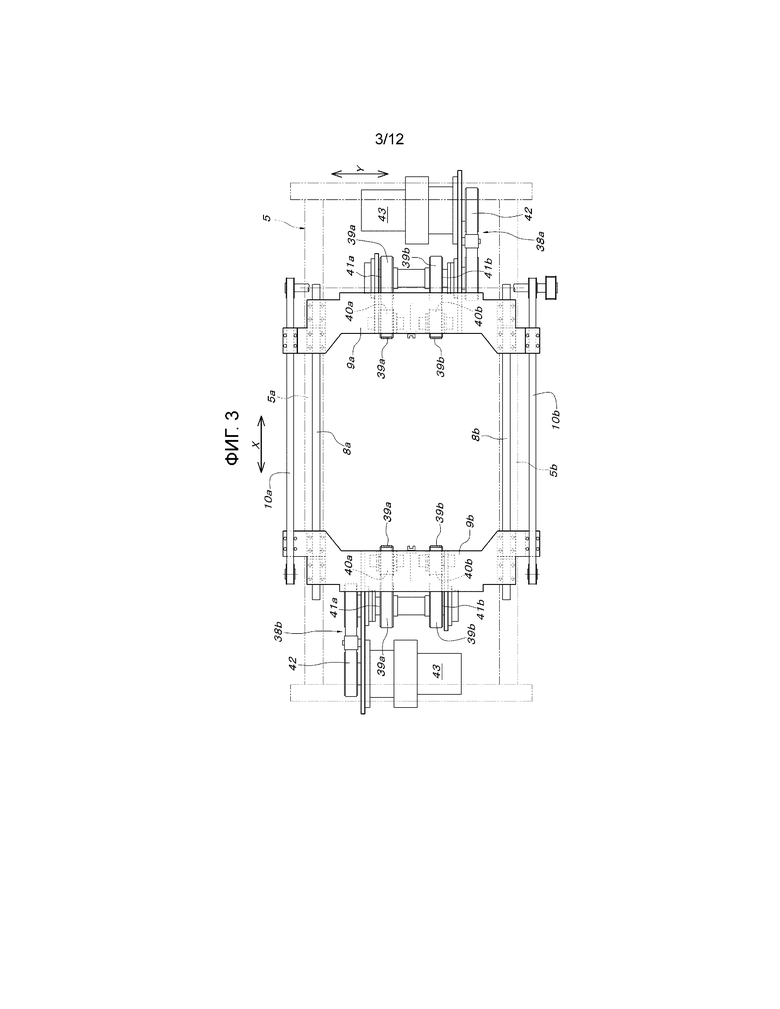
[Фиг.3] Фиг.3 представляет собой вид в плане, показывающий обеспечивающий перемещение в направлении Х, приводной механизм в транспортирующем устройстве, предназначенном для подъема/опускания контейнера.
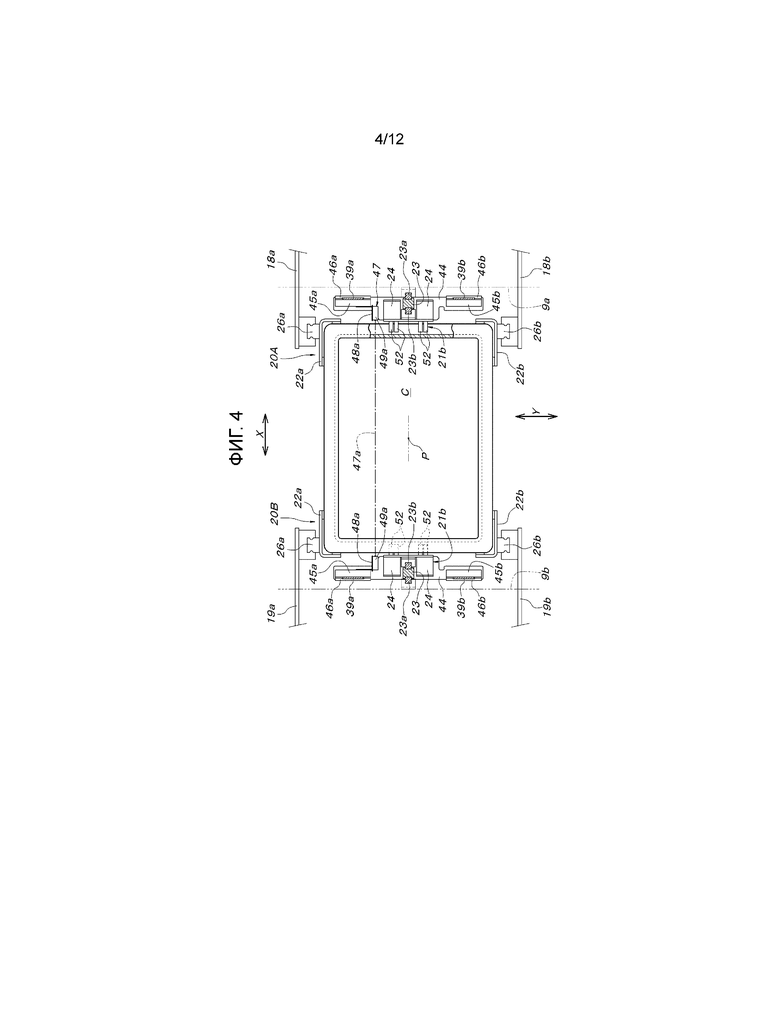
[Фиг.4] Фиг.4 представляет собой выполненный с частичным вырывом вид в плане, показывающий состояние удерживания контейнера в транспортирующем устройстве, предназначенном для подъема/опускания контейнера.
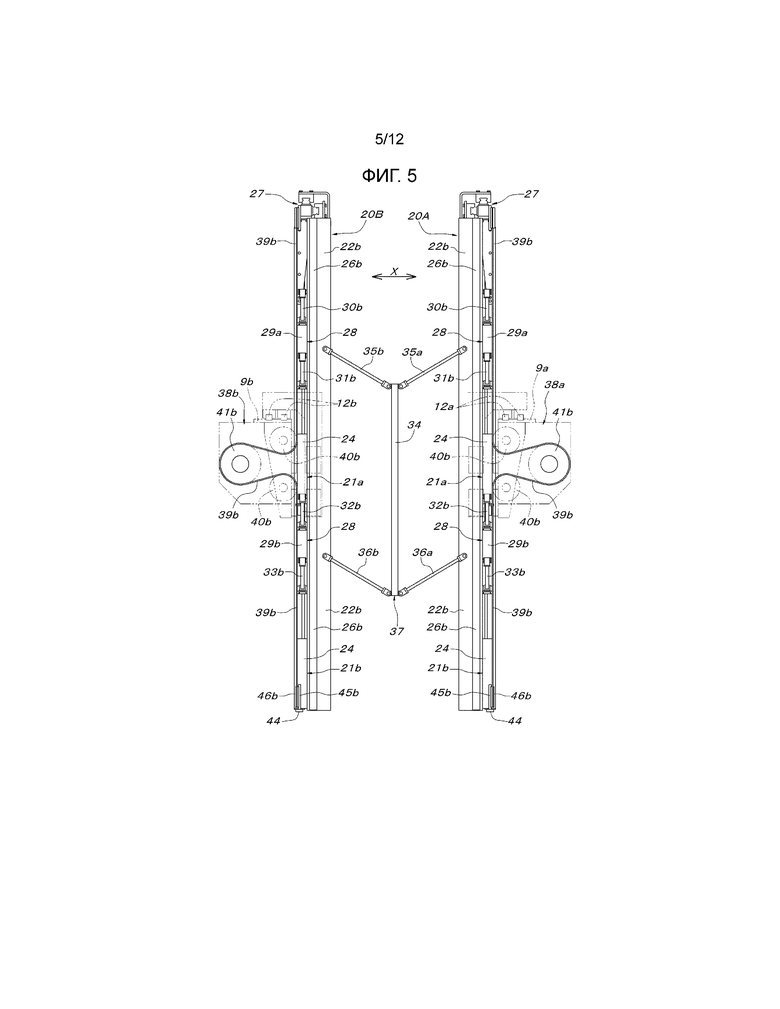
[Фиг.5] Фиг.5 представляет собой вертикальный вид, если смотреть снаружи в направлении Y на основную часть транспортирующего устройства, предназначенного для подъема/опускания контейнера.
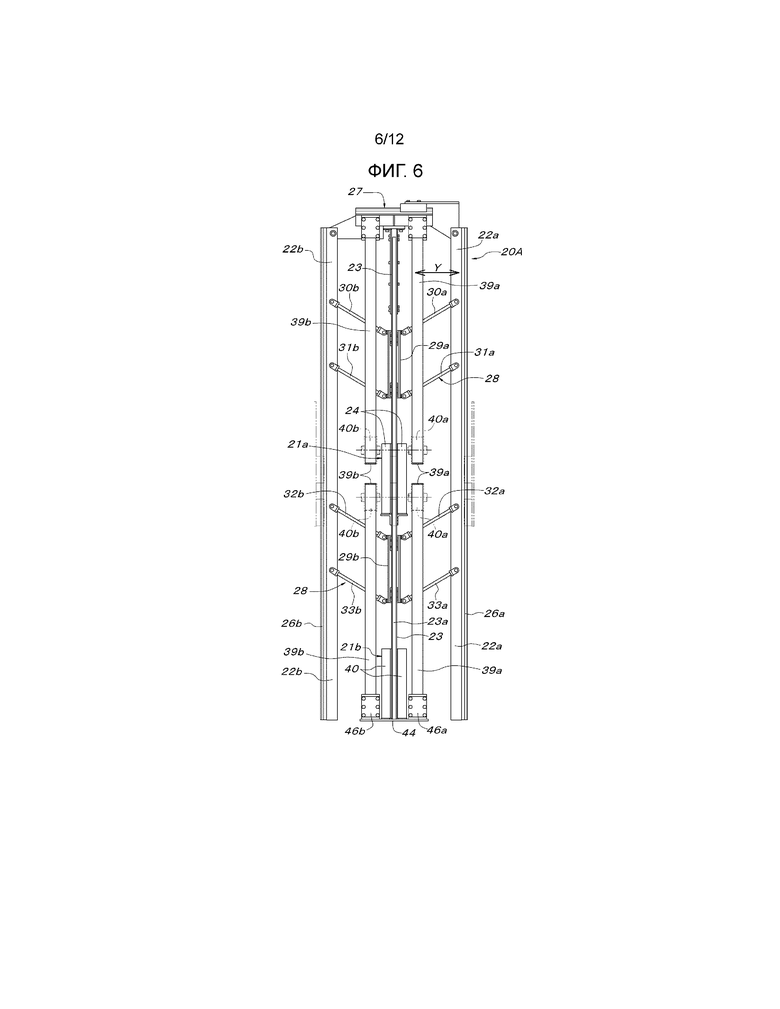
[Фиг.6] Фиг.6 представляет собой вертикальный вид, если смотреть снаружи в направлении Х на основную часть транспортирующего устройства, предназначенного для подъема/опускания контейнера.
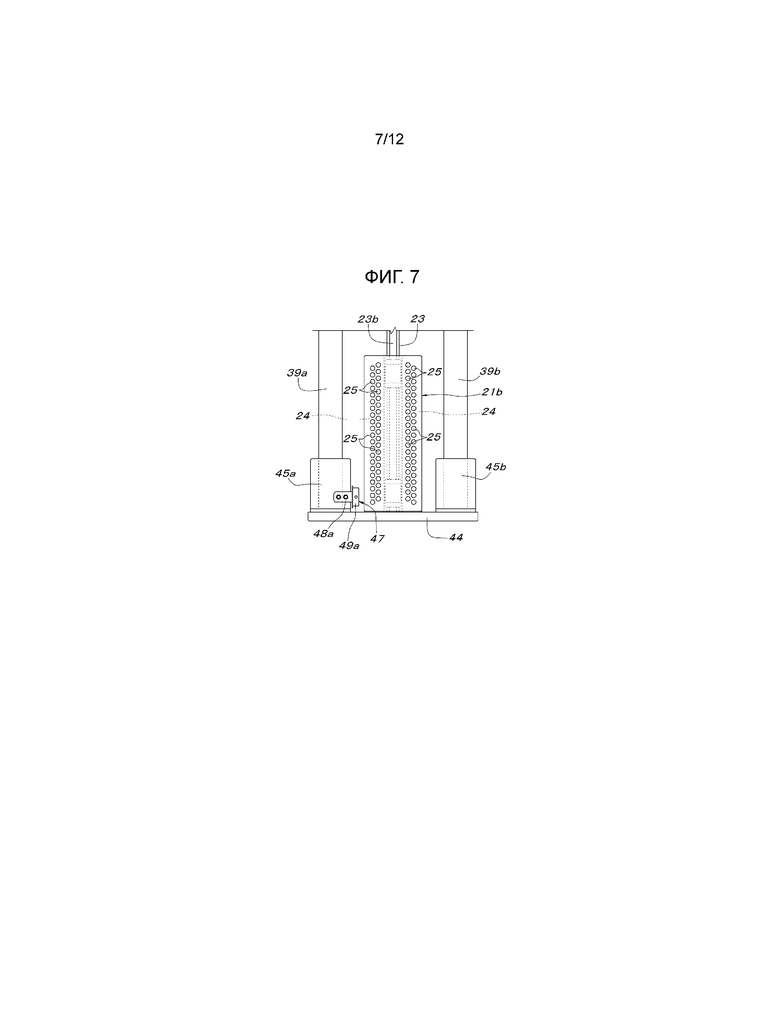
[Фиг.7] Фиг.7 представляет собой вертикальный вид, если смотреть с внутренней стороны в направлении Х на нижнее удерживающее приспособление по фиг.6.
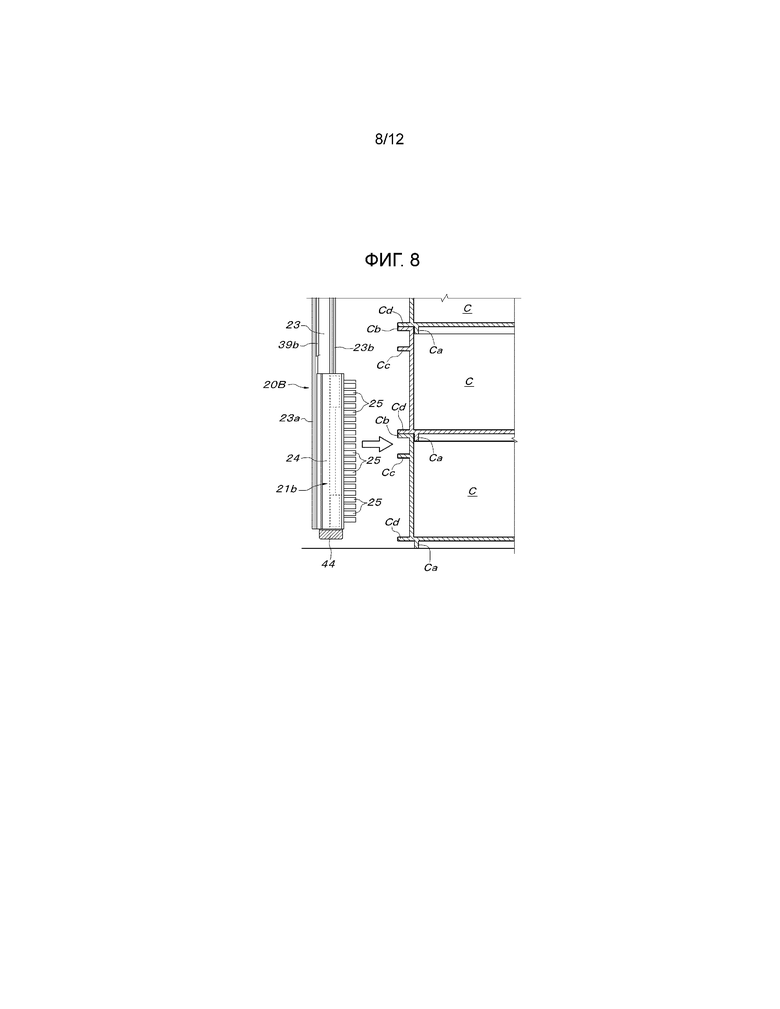
[Фиг.8] Фиг.8 представляет собой вертикальный вид сбоку в разрезе, показывающий состояние непосредственно перед подъемом контейнера посредством нижнего удерживающего приспособления.
[Фиг.9] Фиг.9А представляет собой вертикальный вид сбоку в разрезе, показывающий первую стадию операции подъема контейнера посредством нижнего удерживающего приспособления, и фиг.9В представляет собой вертикальный вид сбоку в разрезе, показывающий вторую стадию данной операции.
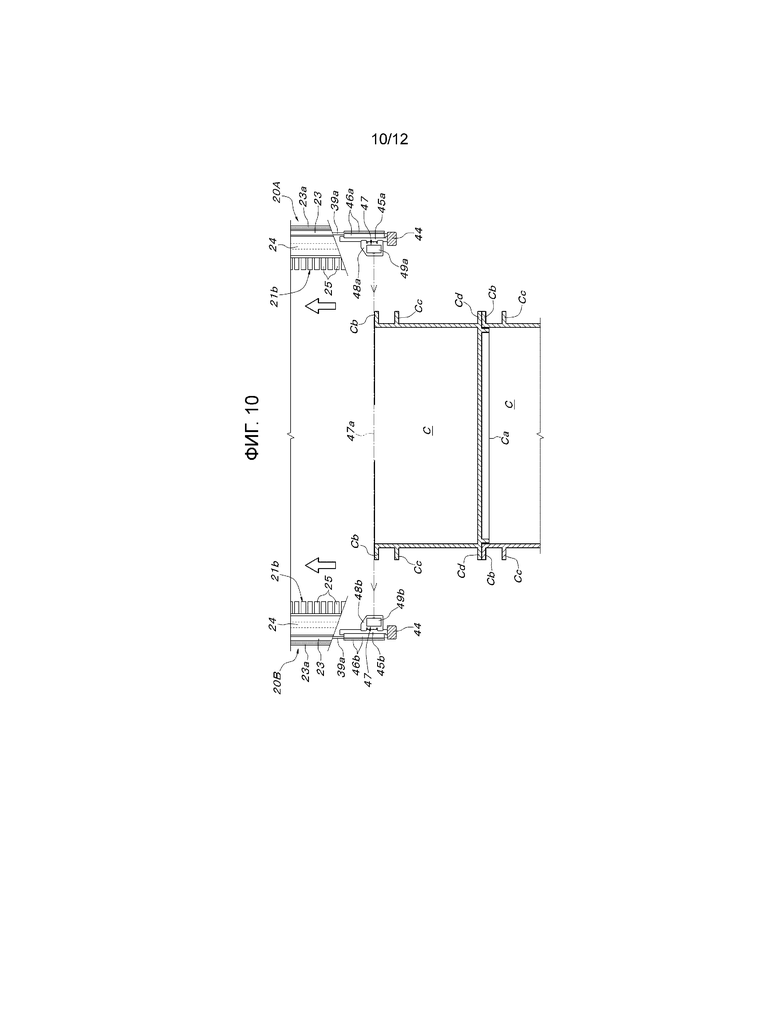
[Фиг.10] Фиг.10 представляет собой вертикальный вид сбоку в разрезе, показывающий основную часть, иллюстрирующую функционирование датчика, когда транспортирующее устройство, предназначенное для подъема/опускания контейнера, поднято после завершения перемещения контейнера.
[Фиг.11] Фиг.11А представляет собой вид сбоку, показывающий состояние в середине перемещения при штабелировании контейнеров, фиг.11В представляет собой вид сбоку, показывающий состояние ненормального штабелирования, когда штабелирование контейнеров завершено, фиг.11С представляет собой вид сбоку, показывающий состояние, когда нормальное штабелирование завершено, и фиг.11D представляет собой вид сбоку, показывающий состояние, когда обнаружено ненормальное штабелирование.
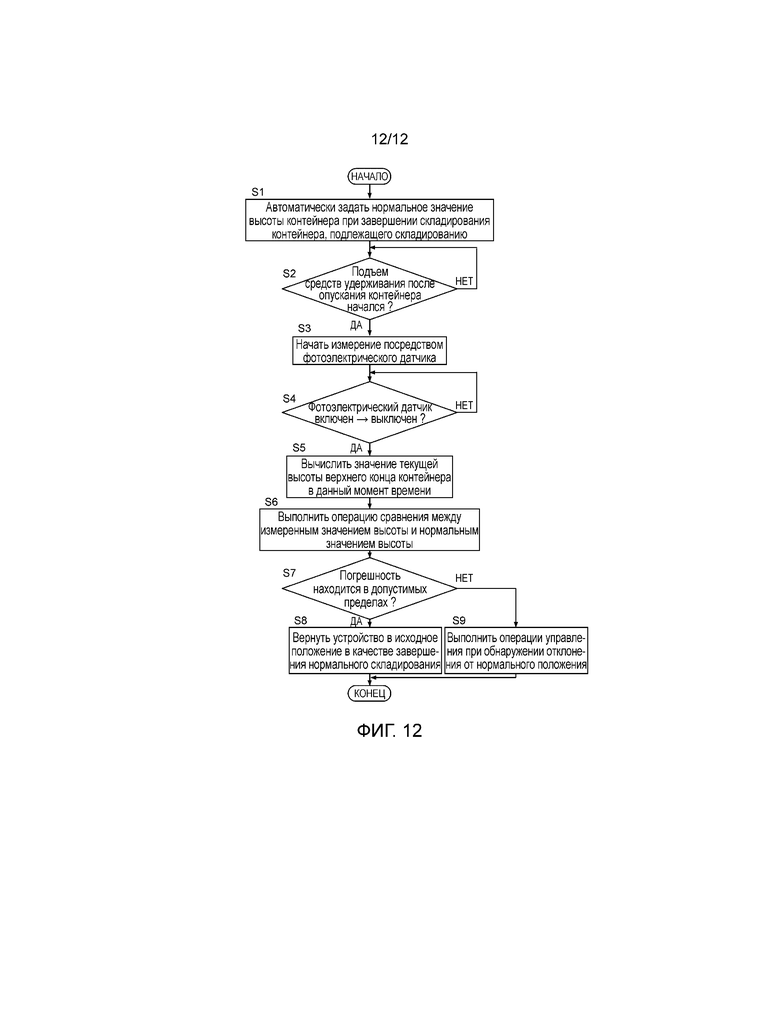
[Фиг.12] Фиг.12 представляет собой схему последовательности операций, иллюстрирующую алгоритм работы системы управления.
[Варианты осуществления изобретения]
[0012]
В складском сооружении, показанном на фиг.1, транспортирующее устройство 2, предназначенное для подъема/опускания контейнера, размещено над верхней частью зоны 1 складирования/хранения контейнеров, имеющей прямоугольную форму в горизонтальной плоскости. В зоне 1 складирования контейнеров имеются пара передней и задней рельсовых направляющих 3, которые расположены горизонтально вдоль передней и задней сторон данной зоны; на пару на передней и задней рельсовых направляющих 3 опирается длинный в горизонтальном направлении, перемещающийся элемент 4, который выполнен с возможностью свободного перемещения по горизонтали в направлении Y (в направлении влево/вправо); на перемещающийся элемент 4 опирается каретка 5, которая выполнена с возможностью свободного перемещения по горизонтали в направлении Х (в направлении вперед-назад), и транспортирующее устройство 2, предназначенное для подъема/опускания контейнера, опирается на каретку 5. Следовательно, транспортирующее устройство 2, предназначенное для подъема/опускания контейнера, может быть перемещено в зону, находящуюся непосредственно над произвольным местом в пределах зоны 1 складирования контейнеров, посредством горизонтального перемещения перемещающегося элемента 4 в направлении Y и горизонтального перемещения каретки 5 в направлении Х на перемещающемся элементе 4. В зоне 1 складирования контейнеров дополнительно предусмотрены конвейер 6 для ввода контейнеров, который обеспечивает перемещение контейнера из пространства, наружного по отношению к зоне 1 складирования контейнеров, в зону 1 складирования контейнеров, и конвейер 7 для удаления контейнеров, который обеспечивает перемещение контейнера из зоны 1 складирования контейнеров в пространство, наружное по отношению к зоне 1 складирования контейнеров.
[0013]
Как показано на фиг.2-4, плоская поверхность каретки 5 образована с формой прямоугольной рамы; на образующих пару в направлении Y, боковых рамных элементах 5а и 5b установлены рельсовые направляющие 8а и 8b, параллельные направлению Х, и на образующих пару в направлении Y, рельсовых направляющих 8а и 8b имеются образующие пару в направлении Х, подвижные основания 9а и 9b, обе концевые части которых закреплены с возможностью свободного перемещения вбок в направлении Х. На боковых рамных элементах 5а и 5b каретки 5 в наружных местах боковых рамных элементов 5а и 5b приводные бесконечные ремни 10а и 10b, обеспечивающие перемещение в направлении Х, натянуты параллельно направлению Х; дополнительно предусмотрено приводное средство, которое осуществляет приведение в движение обоих приводных бесконечных ремней 10а и 10b, обеспечивающих перемещение в направлении Х, для обеспечения их вращения в прямом направлении и в обратном направлении синхронно друг с другом; обе концевые части подвижного основания 9а, расположенные с одной стороны, присоединены к верхней направляющей части, которая перемещается в том же направлении, что и оба приводных бесконечных ремня 10а и 10b, и обе концевые части подвижного основания 9b, расположенные с другой стороны, присоединены к нижней направляющей части, которая перемещается в направлении, противоположном по отношению к направлению перемещения верхней направляющей части обоих приводных бесконечных ремней 10а и 10b, обеспечивающих перемещение в направлении Х. Следовательно, когда оба приводных бесконечных ремня 10а и 10b, обеспечивающих перемещение в направлении Х, приводятся в движение посредством приводного средства для обеспечения их вращения в прямом направлении, два подвижных основания 9а и 9b приближаются друг к другу в направлении Х, в то время как тогда, когда оба приводных бесконечных ремня 10а и 10b, обеспечивающих перемещение в направлении Х, приводятся в движение для обеспечения их вращения в обратном направлении, два подвижных основания 9а и 9b удаляются друг от друга в направлении Х.
[0014]
На образующих пару в направлении Х, подвижных основаниях 9а и 9b образующие пару в направлении Y, подвижные боковые рамные элементы 11а и 11b, длина которых в направлении Х больше длины траектории возвратно-поступательного перемещения подвижных оснований 9а и 9b в направлении Х, опираются на рельсовые направляющие 12а и 12b, установленные на подвижных основаниях 9а и 9b параллельно направлению Y с возможностью свободного перемещения параллельно направлению Y. На каретке 5 в наружных местах обоих концов подвижных боковых рамных элементов 11а и 11b приводные бесконечные ремни 13а и 13b, обеспечивающие перемещение в направлении Y, натянуты параллельно направлению Y, при этом приводное средство, которое осуществляет приведение в движение обоих приводных бесконечных ремней 13а и 13b, обеспечивающих перемещение в направлении Y, для обеспечения их вращения в прямом направлении и в обратном направлении синхронно друг с другом, предусмотрено на каретке 5. Обе концевые части подвижного бокового рамного элемента 11а, расположенные с одной стороны, присоединены к верхней направляющей части, которая перемещается в том же направлении, что и оба приводных бесконечных ремня 13а и 13b, обеспечивающих перемещение в направлении Y, и обе концевые части подвижного бокового рамного элемента 11b, расположенные с другой стороны, присоединены к нижней направляющей части, которая перемещается в направлении, противоположном по отношению к направлению перемещения верхней направляющей части обоих приводных бесконечных ремней 13а и 13b, обеспечивающих перемещение в направлении Y. Следовательно, когда оба приводных бесконечных ремня 13а и 13b, обеспечивающих перемещение в направлении Y, приводятся в движение посредством приводного средства для обеспечения их вращения в прямом направлении, два подвижных боковых рамных элемента 11а и 11b приближаются друг к другу в направлении Y, в то время как тогда, когда оба приводных бесконечных ремня 13а и 13b, обеспечивающих перемещение в направлении Y, приводятся в движение для обеспечения их вращения в обратном направлении, два подвижных рамных элемента 11а и 11b удаляются друг от друга в направлении Y. Кроме того, на внутренних сторонах соответствующих подвижных боковых рамных элементов 11а и 11b посредством рельсовых направляющих 14а и 15а и 14b и 15b, установленных с внутренней стороны подвижных боковых рамных элементов 11а и 11b, закреплены образующие пары в направлении Х, подвижные элементы 16а и 17а и 16b и 17b, и предусмотрены кронштейны 18а-19b, которые проходят внутрь в направлении Х от соответствующих подвижных элементов 16а-17b.
[0015]
Транспортирующее устройство 2, предназначенное для подъема/опускания контейнера, включает в себя средства 20А и 20В удерживания контейнера, образующие пару в направлении Х, которые свободно поднимаются/опускаются. Оба средства 20А и 20В удерживания контейнера включают в себя удерживающие приспособления 21а и 21b в виде двух рядов, расположенных друг над другом в вертикальном направлении, которые расположены в центре, определяемом в направлении Y, и пару установочных приспособлений 22а и 22b, которые расположены с обеих сторон удерживающих приспособлений 21а и 21b в направлении Y и имеют конструкцию, при которой они являются симметричными друг относительно друга. Соответствующие удерживающие приспособления 21а и 21b имеют одинаковую конструкцию, посредством которой они опираются с возможностью их свободного подъема и опускания по отдельности в пределах заданного интервала на нижнем конце и на промежуточной высоте поднимающегося/опускающегося столбчатого элемента 23, который опирается на внутреннюю сторону подвижных оснований 9а и 9b с возможностью свободного подъема/опускания в вертикальном направлении, и имеют конструкцию, в которой, как показано на фиг.4, 7 и 8, на кожухе 24, длинном в вертикальном направлении, который «надет» снаружи на поднимающийся/опускающийся столбчатый элемент 23 и форма которого в плоскости является вогнутой в боковом направлении, большое число штырей 25, выполненных с возможностью выдвигания и отвода/втягивания, предусмотрены так, что они выступают от данного кожуха 24. Соответствующие штыри 25 выровнены с равными интервалами в направлении вверх/вниз в состоянии, в котором, по меньшей мере, два штыря 25 расположены на одной и той же высоте симметрично в боковом направлении и по отдельности поджимаются пружинами и опираются на пружины так, что они выступают от передней поверхности кожуха 24, длинного в вертикальном направлении, на стороне, с которой удерживается контейнер. Как показано на фиг.4, ссылочные позиции 23а и 23b обозначают рельсовые направляющие для подъема/опускания, которые установлены с обеих сторон поднимающегося/опускающегося столбчатого элемента 23, определяемых в направлении Х, вдоль направления его длины, при этом поднимающийся/опускающийся столбчатый элемент 23 опирается посредством рельсовой направляющей 23а для подъема/опускания с возможностью свободного подъема/опускания относительно подвижных оснований 9а и 9b, и удерживающие приспособления 21а и 21b в виде двух рядов, расположенных друг над другом в вертикальном направлении, опираются посредством рельсовой направляющей 23b для подъема/опускания с возможностью их свободного подъема/опускания относительно поднимающегося/опускающегося столбчатого элемента 23 в заданных пределах.
[0016]
Установочные приспособления 22а и 22b, образующие пару в направлении Y, длины которых по существу равны длине поднимающегося/опускающегося столбчатого элемента 23 и поперечные сечения которых являются симметричными в направлении Y и образованы с формой буквы L, опираются на кронштейны 18а-19b, расположенные с их наружных сторон, посредством рельсовых направляющих 26а и 26b для подъема/опускания, которые дополнительно предусмотрены с наружных сторон соответствующих установочных приспособлений 22а и 22b с возможностью свободного подъема/опускания. Как показано на фиг.6, установочные приспособления 22а и 22b, образующие пару в направлении Y, подвешены к опорному средству 27, которое прикреплено к верхней концевой части поднимающегося/опускающегося столбчатого элемента 23, обеспечивающего опору для удерживающих приспособлений 21а и 21b, и соединены друг с другом посредством соединительного механизма 28 шарнирного параллелограмма. Опорное средство 27 обеспечивает возможность относительного приближения обоих установочных приспособлений 22а и 22b друг к другу или удаления обоих установочных приспособлений 22а и 22b друг от друга в направлении Y, и соединительный механизм 28 шарнирного параллелограмма образован посредством: поднимающихся/опускающихся элементов 29а и 29b в виде двух рядов, расположенных друг над другом в вертикальном направлении, которые опираются на рельсовую направляющую 23b для подъема/опускания, установленную на поднимающемся/опускающемся столбчатом элементе 23, с возможностью их свободного подъема/опускания относительно поднимающегося/опускающегося столбчатого элемента 23, и параллельных соединительных элементов 30а-31b и 32а-33b, которые соединяют как верхние, так и нижние концы соответствующих поднимающихся/опускающихся элементов 29а и 29b с двумя верхними и нижними частями соответствующих установочных приспособлений 22а и 22b. Кроме того, установочные приспособления 22а, 22а и установочные приспособления 22b, 22b, образующие пары в направлении Х и расположенные с одной и той же стороны средств 20А и 20В удерживания контейнера, определяемой в направлении Y, как показано на фиг.5, соединены друг с другом посредством соединительного механизма 37 шарнирного параллелограмма, который образован посредством: центрального соединительного элемента 34, который расположен в центре между ними и который является длинным в направлении вверх/вниз, и параллельных соединительных элементов 35а-36b, которые соединяют как верхний, так и нижний концы центрального соединительного элемента 34 с двумя верхними и нижними частями установочных приспособлений 22а, 22а и 22b, 22b с обеих сторон.
[0017]
На подвижных основаниях 9а и 9b, образующих пару в направлении Х, предусмотрены приводные средства 38а и 38b для подъема/опускания, которые обеспечивают подъем/опускание средств 20А и 20В удерживания контейнера, предусмотренных на соответствующих подвижных основаниях 9а и 9b. Оба приводных средства 38а и 38b для подъема/опускания имеют одинаковую конструкцию и, как показано на фиг.3, 5 и 6, образованы посредством: закрепленных ремней 39а и 39b, которые образуют пару в направлении Y и оба конца которых прикреплены как к верхнему, так и к нижнему концам поднимающегося/опускающегося столбчатого элемента 23; коаксиальных ведущих шкивов 41а и 41b, которые образуют пару в направлении Y и поверх которых с нижней стороны соответствующих подвижных оснований 9а и 9b натянуты соответствующие закрепленные ремни 39а и 39b, которые натягиваются в направлении наружу посредством образующих пару, верхнего и нижнего направляющих шкивов 40а и 40b, и электродвигателя 43, оснащенного редуктором, который осуществляет приведение в движение коаксиальных ведущих шкивов 41а и 41b посредством ременной передачи 42 для обеспечения их вращения в прямом направлении и в обратном направлении. Приводное средство выполнено с такой конфигурацией, что посредством электродвигателя 43, снабженного редуктором, коаксиальные ведущие шкивы 41а и 41b, образующие пару в направлении Y, приводятся в движение для обеспечения их вращения в прямом направлении и в обратном направлении, и, таким образом, поднимающийся/опускающийся столбчатый элемент 23 поднимается/опускается посредством закрепленных ремней 39а и 39b, образующих пару в направлении Y. При движении подъема/опускания поднимающегося/опускающегося столбчатого элемента 23 удерживающие приспособления 21а и 21b, опирающиеся на поднимающийся/опускающийся столбчатый элемент 23, и установочные приспособления 22а и 22b, образующие пару в направлении Y и подвешенные посредством опорного средства 27 к верхнему концу поднимающегося/опускающегося столбчатого элемента 23, перемещаются для их совместного подъема/опускания.
[0018]
Соответствующие средства 20А и 20В удерживания контейнера, которые перемещаются для обеспечения их подъема/опускания посредством приводных средств 38а и 38b для подъема/опускания относительно соответствующих подвижных оснований 9а и 9b, как описано выше, симметрично приближаются друг к другу или удаляются друг от друга при вращении приводных бесконечных ремней 10а и 10b, обеспечивающих перемещение в направлении Х и показанных на фиг.3, в прямом направлении и в обратном направлении, и, кроме того, образующие пару в направлении Y, установочные приспособления 22а и 22b в соответствующих средствах 20А и 20В удерживания контейнера могут быть симметрично приближены друг к другу или удалены друг от друга в направлении Y при вращении приводных бесконечных ремней 13а и 13b, обеспечивающих перемещение в направлении Y и показанных на фиг.2, в прямом направлении и в обратном направлении. Перемещения, описанные выше, могут быть выполнены или по отдельности, или одновременно.
[0019]
Как показано на фиг.4 и 7, для прикрепления закрепленных ремней 39а и 39b, образующих пару в направлении Y, к нижней концевой части поднимающегося/опускающегося столбчатого элемента 23 используются горизонтальный элемент 44, к центру которого жестко прикреплен нижний конец поднимающегося/опускающегося столбчатого элемента 23, и базовые плиты 45а и 45b, которые предназначены для прикрепления ремней и которые жестко закреплены на обеих концевых частях горизонтального элемента 44, определяемых в направлении Y, и, таким образом, нижние концевые части соответствующих закрепленных ремней 39а и 39b прикреплены к предназначенным для прикрепления ремней, базовым плитам 45а и 45b посредством элементов 46а и 46b для прикрепления ремней. Фотоэлектрический датчик 47, предназначенный для определения высоты верхнего конца перемещенного контейнера, прикреплен к базовой плите 45а, предназначенной для прикрепления ремня, со стороны средства 20А удерживания контейнера и к базовой плите 45а, предназначенной для прикрепления ремня, со стороны средства 20В удерживания контейнера, которые расположены симметрично в направлении Х, из базовых плит 45а и 45b, предназначенных для прикрепления ремней, так, что его оптическая ось будет параллельна направлению Х. Фотоэлектрический датчик 47 образован посредством излучателя 49а света и приемника 49b света, которые прикреплены посредством кронштейнов 48а и 48b.
[0020]
В складском сооружении, выполненном с описанной выше конфигурацией, контейнер С, который перемещают в зону 1 складирования контейнеров посредством конвейера 6 для ввода контейнеров, складируют и хранят в произвольном месте в пределах зоны 1 складирования контейнеров, или, напротив, контейнер С, который хранится в произвольном месте в зоне 1 складирования контейнеров, опускают на конвейер 7 для удаления контейнеров, и контейнер С может быть перемещен из зоны 1 складирования контейнеров посредством конвейера 7 для удаления контейнеров. В частности, транспортирующее средство 2 на каретке 5, предназначенное для подъема/опускания контейнеров, размещают непосредственно над местом выполнения операции подъема/опускания контейнера С в зоне 1 складирования контейнеров посредством перемещения перемещающегося элемента 4 в направлении Y и перемещения каретки 5 на перемещающемся элементе 4 в направлении Х, и после этого операцию подъема/опускания контейнера С выполняют посредством операции подъема/опускания контейнера, выполняемой транспортирующим устройством 2, предназначенным для подъема/опускания контейнера.
[0021]
Операция подъема контейнера, выполняемая транспортирующим устройством 2, предназначенным для подъема/опускания контейнера, будет описана ниже. Несмотря на то, что сначала транспортирующее устройство 2, предназначенное для подъема/опускания контейнера и находящееся в состоянии, в котором средства 20А и 20В удерживания контейнера подняты в положение готовности, соответствующее пределу подъема, перемещают в зону, находящуюся непосредственно на местом хранения контейнера С, подлежащего извлечению, во время данного перемещения до тех пор, пока воображаемый прямоугольник на плоскости, соединяющей четыре установочных приспособления 22а и 22b в средствах 20А и 20В удерживания контейнера не станет немного бóльшим, чем размер контейнера С, подлежащего извлечению, в плоскости, средства 20А и 20В удерживания контейнера приближают друг к другу в направлении Х, и установочные приспособления 22а и 22b в соответствующих средствах 20А и 20В удерживания контейнера приближают друг к другу в направлении Y. После этого, когда транспортирующее устройство 2, предназначенное для подъема/опускания контейнера, достигнет зоны, находящейся непосредственно над местом хранения контейнера С, подлежащего извлечению, положение центра прямоугольника, окруженного четырьмя установочными приспособлениями 22а и 22b, будет по существу совпадать на виде в плане с положением Р центра (см. фиг.4) контейнера С, подлежащего извлечению. В таком состоянии, как описано ранее, приводные средства 38а и 38b для подъема/опускания приводятся в действие, и, таким образом, средства 20А и 20В удерживания контейнера опускаются до высоты нижней поверхности контейнера С, подлежащего извлечению, (такого как один контейнер, размещенный на поверхности пола зоны 1 складирования контейнеров, или все штабелированные контейнеры, или определенный контейнер, находящийся на произвольной высоте в штабеле контейнеров). Как показано на фиг.4 и 7, контейнер С включает в себя на своей нижней поверхности выступающую нижнюю часть Са, которая вставляется в верхнюю концевую открытую часть нижнего контейнера С во время штабелирования, и представляет собой контейнер, в котором ребра Cb-Cd жесткости, проходящие в горизонтальном направлении, образованы как одно целое как на верхнем, так и на нижнем концах периферийной стеновой части и на промежуточной высоте ближе к верхнему концу так, чтобы они были непрерывными на всей периферии, при этом форма контейнера С в плоскости представляет собой форму пластиковой коробки с открытой верхней стороной ее прямоугольника и контейнер С имеет в целом размеры, обеспечивающие возможность его переноски.
[0022]
Как показано на фиг.8, оба средства 20А и 20В удерживания контейнера опускают до заданной высоты, и после этого приводные бесконечные ремни 10а и 10b, обеспечивающие перемещение в направлении Х, приводятся в движение для обеспечения их вращения в направлении, в котором оба средства 20А и 20В удерживания контейнера приближаются друг к другу в направлении Х, и приводные бесконечные ремни 13а и 13b, обеспечивающие перемещение в направлении Y, приводятся в движение для обеспечения их вращения в направлении, в котором образующие пару в направлении Y, установочные приспособления 22а и 22b в соответствующих средствах 20А и 20В удерживания контейнера приближаются друг к другу в направлении Y. Следовательно, как показано на фиг.4, удерживающие приспособления 21а и 21b в обоих средствах 20А и 20В удерживания контейнера зажимают контейнер С, подлежащий извлечению, с обеих сторон в направлении Х, и четыре установочных приспособления 22а и 22b прилегают снаружи к четырем угловым частям контейнера С. Когда установочные приспособления 22а и 22b входят в контакт с боковой поверхностью (в частности, с периферийным краем ребер Сb-Cd жесткости) соответствующих угловых частей контейнера С, как показано на фиг.9А, соответствующие удерживающие приспособления 21а и 21b находятся в положении, в котором передняя поверхность кожуха 24, длинного в вертикальном направлении, находится рядом с наружной поверхностью (в частности, рядом с периферийным краем ребер Cb-Cd жесткости) контейнера С, те штыри 25 из штырей 25 соответствующих удерживающих приспособлений 21а и 21b, которые расположены на расстоянии в вертикальном направлении от ребер Сb-Сd жесткости, входят в состоянии как они есть во внутреннее пространство между ребрами Сb-Cd жесткости, соседними друг с другом в вертикальном направлении, и штыри 25, которые перекрывают ребра Сb-Cd жесткости, отводятся в кожух 24, длинный в вертикальном направлении, при преодолении поджимающей силы, создаваемой пружинами, поджимающими штыри 25. Несмотря на то, что нижнее удерживающее приспособление 21b из удерживающих приспособлений 21а и 21b в виде двух рядов, расположенных друг над другом в вертикальном направлении, функционирует постоянно, верхнее удерживающее приспособление 21а функционирует только тогда, когда контейнеры С, штабелированные в виде множества рядов, являются целевыми объектами, подлежащими извлечению, и их общая высота больше расстояния между удерживающими приспособлениями 21а и 21b в виде двух рядов, расположенных друг над другом в вертикальном направлении.
[0023]
После этого оба средства 20А и 20В удерживания контейнера, находящиеся в состоянии, в котором они удерживают контейнер и которое показано на фиг.9А, поднимают до высоты, соответствующей предельному подъему, посредством приведения в действие приводных средств 38а и 38b для подъема/опускания, и, таким образом, как показано на фиг.9В, контейнер С, подлежащий извлечению, может быть поднят в вертикальном направлении вверх посредством, по меньшей мере, одного из ребер Cb и Cс жесткости с помощью штырей 25 (двух штырей 25, которые расположены симметрично в направлении Y так, что они соответствуют положению центра боковой поверхности контейнера, параллельной направлению Y), которые входят в зону, находящуюся непосредственно под ребрами Cb и Cс жесткости, и предусмотрены, по меньшей мере, на нижнем удерживающем приспособлении 21b из удерживающих приспособлений 21а и 21b в виде двух рядов, расположенных друг над другом в вертикальном направлении, с обеих сторон в направлении Х. После этого транспортирующее устройство 2, предназначенное для подъема/опускания контейнера, которое поднимает контейнер С, перемещается в место, находящееся над конвейером 7 для удаления контейнеров, посредством перемещения перемещающегося элемента 4 в направлении Y и перемещения каретки 5 на перемещающемся элементе 4 в направлении Х, и затем выполняется операция опускания контейнера, описанная ниже, в результате чего обеспечивается возможность опускания «подвешенного» контейнера С на конвейер 7 для удаления контейнеров.
[0024]
Далее будет описана операция опускания контейнера. Транспортирующее устройство 2, которое предназначено для подъема/опускания контейнера и в котором контейнер С, подлежащий складированию/хранению, который был перемещен в зону 1 складирования контейнеров посредством конвейера 6 для ввода контейнеров, удерживается с помощью предназначенных для удерживания контейнера средств 20А и 20В транспортирующего устройства 2, предназначенного для подъема/опускания контейнера, за счет операции подъема контейнера, описанной выше, и поднят на высоту, соответствующую предельному подъему, и после этого транспортирующее устройство 2, предназначенное для подъема/опускания контейнера, которое поднимает контейнер С, перемещают в заданное место складирования в пределах зоны 1 складирования контейнеров посредством перемещения перемещающегося элемента 4 в направлении Y и перемещения каретки 5 на перемещающемся элементе 4 в направлении Х. Фактический размер (фактическое значение полной высоты в том случае, когда контейнеры штабелированы) контейнера С, подлежащего складированию, который подвергается манипуляциям в данный момент, автоматически вводится в качестве части данных для управления складированием, например, посредством его считывания из базы данных по обрабатываемым контейнерам перед выполнением операции складирования. Следовательно, поскольку во время выполнения операции складирования путем штабелирования, показанной на фиг.11А, значение высоты складированного контейнера Сх, на котором контейнер С размещают при штабелировании, также может быть получено из базы данных о состоянии склада, значение высоты контейнера С, подлежащего складированию, который заново складируют и штабелируют, добавляется к значению высоты складированного контейнера Сх, и таким образом определяется нормальное значение высоты всех перемещенных контейнеров С после завершения складирования, которое автоматически вводится в качестве элемента данных по управлению складированием. Таким образом, перед началом операции складирования нормальное значение высоты верхнего конца перемещенных контейнеров С в момент завершения складирования автоматически задается в качестве элемента данных для автоматического управления операцией складирования, которая должна начаться (шаг S1 на фиг.12).
[0025]
Когда транспортирующее устройство 2, предназначенное для подъема/опускания контейнера, которое поднимает контейнер С непосредственно над заданным местом складирования в пределах зоны 1 складирования контейнеров, останавливается, приводные средства 38а и 38b для подъема/опускания приводятся в действие для опускания средств 20А и 20В удерживания контейнера, удерживающих контейнер С, подлежащий складированию, и таким образом контейнер С, подлежащий складированию, опускается в заданное место складирования в пределах зоны 1 складирования контейнеров. Тем не менее, в том случае, когда контейнер С, подлежащий складированию, опускают непосредственно на поверхность пола в пределах зоны 1 складирования контейнеров, средства 20А и 20В удерживания контейнера опускают до высоты, которая немного меньше высоты, на которой выступающая нижняя часть Са контейнера С, подлежащего складированию и удерживаемого средствами 20А и 20В удерживания контейнера, достигает пола. В том случае, когда, как показано на фиг.11А, контейнер С, подлежащий складированию, опускают и размещают поверх складированного контейнера Сх, который уже был помещен на склад и хранится, выступающая нижняя часть Са контейнера С, подлежащего складированию и удерживаемого средствами 20А и 20В удерживания контейнера, вставляется в верхнюю концевую открытую часть складированного контейнера Сх, и, таким образом, средства 20А и 20В удерживания контейнера опускаются до высоты, которая немного меньше высоты, на которой самое нижнее ребро Сd жесткости размещается на самом верхнем ребре Cb жесткости складированного контейнера С. Когда средства 20А и 20В удерживания контейнера опускаются до заданной высоты и опускание прекращается, в противоположность операции подъема контейнера приводные бесконечные ремни 10а и 10b, обеспечивающие перемещение в направлении Х, и приводные бесконечные ремни 13а и 13b, обеспечивающие перемещение в направлении Y, приводятся во вращение в обратном направлении, так что удерживающие приспособления 21а и 21b, образующие пару в направлении Х, удаляются от обеих определяемых в направлении Х, боковых поверхностей контейнера С, подлежащего складированию, и четыре установочных приспособления 22а и 22b удаляются от четырех угловых частей контейнера С, подлежащего складированию, в направлении Х и в направлении Y, так что средства 20А и 20В удерживания контейнера отделяются в горизонтальном направлении от контейнера С, подлежащего складированию, в результате чего удерживание прекращается.
[0026]
После завершения операции прекращения удерживания, описанной выше, приводные средства 38а и 38b для подъема/опускания приводятся в действие для подъема транспортирующего устройства 2, предназначенного для подъема/опускания контейнера, (подъема средств 20А и 20В удерживания контейнера) до верхней предельной высоты, и, таким образом, операция опускания контейнера С, подлежащего складированию, завершается. Тем не менее, когда после прекращения удерживания начинается подъем средств 20А и 20В удерживания контейнера (шаг S2 на фиг.12), фотоэлектрический датчик 47, прикрепленный к средствам 20А и 20В удерживания контейнера, переводится в рабочее состояние (шаг S3 на фиг.12), и, таким образом, существует возможность определения высоты верхнего конца перемещенного контейнера С (контейнера, подлежащего складированию) посредством фотоэлектрического датчика 47.
[0027]
В частности, используются импульсный кодовый датчик, который, например, соединен с электродвигателем 43, который оснащен редуктором и предусмотрен в приводных средствах 38а и 38b для подъема/опускания, которые обеспечивают приведение в движение средств 20А и 20В удерживания контейнера для их подъема/опускания, и средство подсчета, которое добавляет переданный кодовым датчиком импульс при подъеме и которое вычитает импульс при опускании, и, таким образом, существует возможность получения значения текущей высоты средств 20А и 20В удерживания контейнера относительно заданной контрольной высоты (например, нижнего предельного значения высоты или верхнего предельного значения высоты средств 20А и 20В удерживания контейнера), в соответствии с которой перенастраивается/переустанавливается подсчитанная величина. С другой стороны, поскольку фотоэлектрический датчик 47 находится в промежуточном положении по отношению к двум установочным приспособлениям 22а и 22b, образующим пару в направлении Y, и находится в месте рядом с нижним концом средств 20А и 20В удерживания контейнера, и оптическая ось 47а между излучателем 49а света и приемником 49b света проходит горизонтально в направлении Х, фотоэлектрический датчик 47 находится в состоянии «выключено», пока перемещаемый контейнер С находится в положении, в котором он перекрывает оптическую ось 47а. Когда, как показано на фиг.9, средства 20А и 20В удерживания контейнера подняты, и, таким образом, оптическая ось 47а фотоэлектрического датчика 47 проходит через верхний конец перемещенного контейнера С сверху, приемник 49b света переводится в состояние приема света, и, таким образом, фотоэлектрический датчик 47 переключается в состояние «включено» (шаг S4 на фиг.12). Следовательно, подсчитанное значение (информация о текущей высоте средств 20А и 20В удерживания контейнера), соответствующее переданным импульсам при переключении датчика 47 из состояния «выключено» в состояние «включено», считывается в качестве значения, определяемого как высота верхнего конца перемещенного контейнера С (шаг S5 на фиг.12).
[0028]
Для определенного значения высоты верхнего конца перемещенного контейнера, которое определено посредством использования фотоэлектрического датчика 47, выполняется операция сравнения с нормальным значением высоты верхнего конца перемещенного контейнера, которое задано перед началом операции складирования, и данное сравнение выполняется для определения разности обоих значений (шаг S6 на фиг.12). При выполнении операции сравнения между данной разностью и ранее заданным пороговым значением (шаг S7 на фиг.12) и в том случае, когда данная разность находится в допустимых пределах, существует возможность определения того, что все пространственное положение перемещенного контейнера С после завершения складирования является нормальным, в результате чего на основе определения нормального положения можно перейти к последующей операции (шаг S8 на фиг.12).
[0029]
Тем не менее, когда во время операции складирования путем штабелирования, показанной на фиг.11А, выступающая нижняя часть Са контейнера С, подлежащего складированию, не полностью вставляется в верхнюю концевую открытую часть складированного контейнера Сх, поверх которого размещают контейнер С, и, как показано на фиг.11В, операция складирования завершается в состоянии, в котором часть выступающей нижней части Са контейнера С, подлежащего складированию, захватывается на части периферийного края верхней концевой открытой части складированного контейнера Сх, как показано на фиг.11D, верхний конец перемещенного контейнера С при завершении складирования не будет горизонтальным, но будет наклонным. Следовательно, высота при «отделении» оптической оси 47а фотоэлектрического датчика 47 в направлении вверх от наклонного верхнего конца перемещенного контейнера С, то есть определяемое значение Н2 высоты верхнего конца перемещенного контейнера, определяемое посредством фотоэлектрического датчика 47, увеличивается только на погрешность α по сравнению с определенным значением Н1 высоты верхнего конца перемещенного контейнера, определенным посредством фотоэлектрического датчика 47 при завершении нормального складирования путем штабелирования, как показано на фиг.11С. Поскольку погрешность α, естественно, превышает допустимые пределы, описанные ранее, все пространственное положение перемещенного контейнера С после завершения складирования определяется как ненормальное, в результате чего начинается осуществление всех управляющих воздействий, выполняемых при определении ненормального положения, то есть различных типов управляющих воздействий, которые могут быть рассмотрены и которые описаны ранее (шаг S9 на фиг.12).
[0030]
Несмотря на то, что описано отклонение от нормального положения во время штабелирования, поскольку в обоих случаях, когда один контейнер С перемещают непосредственно на поверхность пола зоны 1 складирования контейнеров и когда посторонний предмет неожиданным образом оказывается на поверхности пола, на которую перемещают контейнер, выступающая нижняя часть Са контейнера С, подлежащего перемещению, оказывается сверху на постороннем предмете, контейнер С наклоняется, и, следовательно, высота самой верхней части контейнера С увеличивается, определяемое значение высоты верхнего конца перемещенного контейнера, определяемое посредством использования фотоэлектрического датчика 47, увеличивается, в результате чего существует возможность определения отклонения от нормального пространственного положения перемещенного контейнера С. Несмотря на то, что в качестве фотоэлектрического датчика 47 используется фотоэлектрический датчик передающего типа, образованный посредством излучателя 49а света и приемника 49b света, в зависимости от обстоятельств также существует возможность использования фотоэлектрического датчика отражающего типа. В этом случае фотоэлектрический датчик отражающего типа прикрепляют к каждому из мест расположения излучателя 49а света и приемника 49b света, значения высоты верхних концов обеих боковых поверхностей контейнера определяют посредством обоих фотоэлектрических датчиков отражающего типа, и, таким образом, существует возможность определения наклона контейнера исходя из погрешности измеренной высоты, или также существует возможность определения наклона контейнера исходя из разности по времени между моментами, когда состояние «включено» переключается в состояние «выключено» в обоих фотоэлектрических датчиках отражающего типа.
[0031]
Поскольку в примере, описанном выше, используется такая конфигурация, что оптическая ось 47а фотоэлектрического датчика 47 параллельна направлению Х, в том случае, когда верхний конец контейнера наклоняется относительно направления Х, погрешность измеренного значения высоты верхнего конца перемещенного контейнера относительно нормального значения высоты верхнего конца перемещенного контейнера увеличивается, в то время как в случае, когда верхний конец контейнера наклоняется относительно направления Y, погрешность уменьшается. С учетом этого обстоятельства должны быть заданы допустимые пределы (пороговое значение) погрешности относительно нормального значения. Однако в том случае, когда контейнеры подвергаются штабелированию, поскольку самое нижнее ребро Cd жесткости верхнего контейнера устанавливается на самом верхнем ребре Cb жесткости нижнего контейнера без сбоев, высота верхнего конца контейнера во время ненормального штабелирования не становится меньше, чем высота верхнего конца контейнера во время нормального штабелирования, в результате чего существует возможность достижения цели за счет такой конфигурации, при которой может быть обнаружен или наклон относительно направления Х, или наклон относительно направления Y.
[0032]
Кроме того, транспортирующее устройство для подъема/опускания контейнера, предназначенного для транспортировки изделий, в соответствии с настоящим изобретением может быть использовано в качестве средства, в котором контейнер устанавливают рядом с конвейерной линией для перемещения контейнера для изготовления изделий, такого как контейнер, и в котором контейнер для транспортировки изделий перемещают на конвейерную линию, средства, в котором другой контейнер для транспортировки изделий размещают поверх контейнера для транспортировки изделий, перемещенного на конвейерную линию, и тому подобного.
[Промышленная применимость]
[0033]
Транспортирующее устройство для подъема/опускания контейнера, предназначенного для транспортировки изделий, в соответствии с настоящим изобретением может быть эффективно использовано на складе для контейнера для транспортировки изделий, такого как контейнер, в частности, в качестве средства для выполнения операций складирования и извлечения контейнера для транспортировки изделий, которое может автоматически определять, нормально или нет размещены контейнеры, предназначенные для транспортировки изделий, при штабелировании во время складирования.
[Описание ссылочных позиций]
[0034]
1 Зона складирования контейнеров
2 Транспортирующее устройство, предназначенное для подъема/опускания контейнера
3, 8а, 8b, 12а, 12b, 14а-15b Рельсовая направляющая
4 Перемещающийся элемент
5 Каретка
6 Конвейер для ввода контейнеров
7 Конвейер для удаления контейнеров
9а, 9b Подвижное основание
10а, 10b Приводной бесконечный ремень, обеспечивающий перемещение в направлении Х
11а, 11b Подвижный боковой рамный элемент
13а, 13b Приводной бесконечный ремень, обеспечивающий перемещение в направлении Y
16а-17b Подвижный элемент
20А, 20В Средство удерживания контейнера
21а, 21b Удерживающее приспособление
22а, 22b Установочное приспособление
23 Поднимающийся/опускающийся столбчатый элемент
25 Штырь, выполненный с возможностью выдвигания/отвода
27 Опорное средство
28, 37 Соединительный механизм шарнирного параллелограмма
38а, 38b Приводное средство для подъема/опускания
39а, 39b Закрепленный ремень
41а, 41b Коаксиальный ведущий шкив
43 Электродвигатель, оснащенный редуктором
47 Фотоэлектрический датчик
47а Оптическая ось
49а Излучатель света
49b Приемник света
С, Сх Контейнер
Са Выступающая нижняя часть контейнера
Сb-Cd Ребро жесткости контейнера

Подъемное/опускное транспортирующее устройство в соответствии с настоящим изобретением выполнено с по меньшей мере двумя наборами средств (20А, 20В) удерживания контейнера, и средства (20А, 20В) удерживания контейнера выполнены с конфигурацией, обеспечивающей возможность их подъема/опускания совместно друг с другом и обеспечивающей возможность их свободного приближения к контейнерам (С) или удаления от контейнеров (С) в горизонтальном направлении вперед-назад. Датчик (47), который определяет высоту верхнего конца перемещаемых контейнеров (С), которые были перемещены и подняты, прикреплен к месту, находящемуся рядом с нижним концом каждого средства (20А, 20В) удерживания контейнера, и определяет отклонение от нормального пространственного положения перемещенных контейнеров (С) посредством операции сравнения между значением высоты верхнего конца перемещенных контейнеров, которое определено датчиком (47), и нормального значения высоты верхнего конца перемещенных контейнеров, которое вычислено на основе высоты контейнера (С), подвергаемого манипуляциям. Изобретение обеспечивает повышение удобства эксплуатации. 16 ил.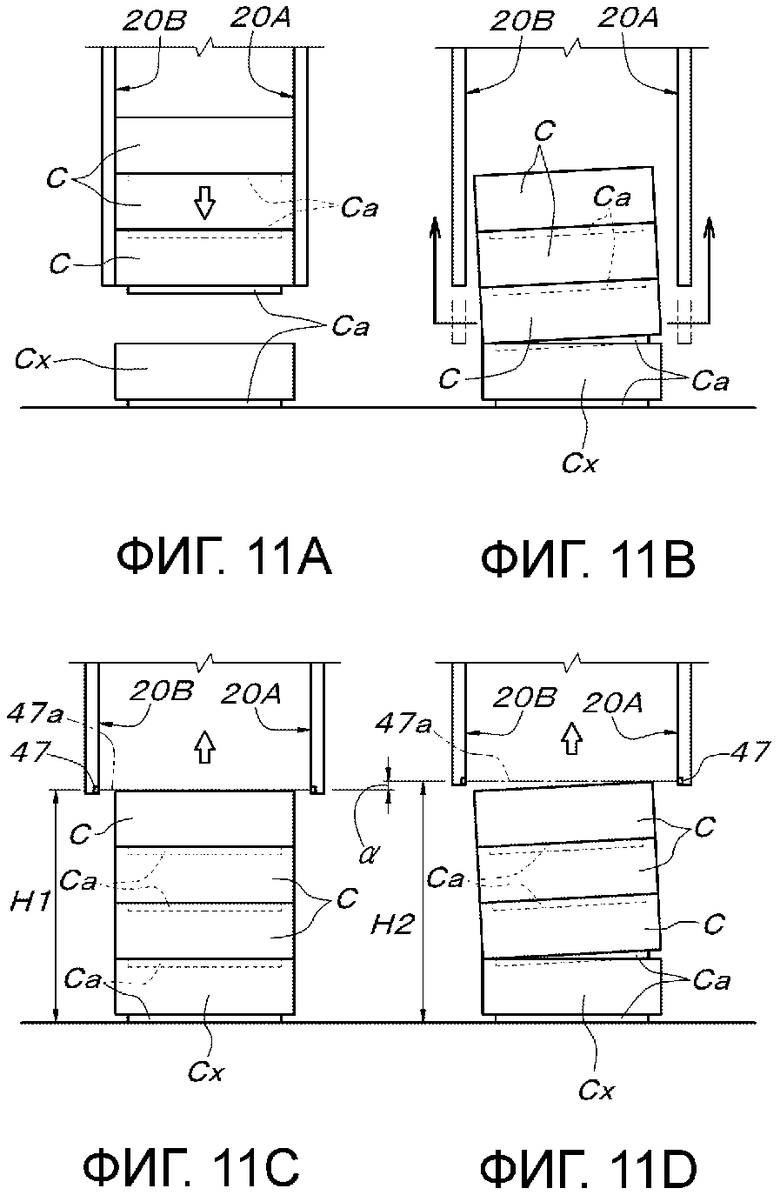
Транспортирующее устройство (2) для подъема/опускания контейнера (С), предназначенного для транспортировки изделий, содержащее:
пару средств (20А, 20В) удерживания контейнера, которые выполнены с возможностью свободного перемещения ближе друг к другу или друг от друга в горизонтальном направлении Х вперед-назад для удерживания контейнера (С), предназначенного для транспортировки изделий, с обеих сторон в направлении Х, и которые установлены с возможностью поднятия/опускания совместно друг с другом с тем, чтобы поднимать/опускать контейнер (С), предназначенный для транспортировки изделий, и
датчик (47) для определения высоты (Н1, Н2) верхнего конца контейнера (С), при этом
датчик (47) прикреплен к паре средств (20А, 20В) удерживания контейнера к месту, находящемуся рядом с нижним концом пары средств (20А, 20В) удерживания контейнера, причем
транспортирующее устройство (2) для подъема/опускания дополнительно содержит систему управления для выполнения операции сравнения между измеренным значением высоты (Н1, Н2) верхнего конца хранящегося контейнера (С), которое определено датчиком (47), когда средства (20А, 20В) удерживания контейнера подняты после опускания контейнера в заданное положение хранения, и нормальным значением высоты верхнего конца хранящегося контейнера, которое рассчитано на основе высоты контейнера (С), который подвергается манипуляциям, для определения отклонения от нормального положения хранящегося контейнера (С),
отличающееся тем, что
пара средств (20А, 20В) удерживания контейнера выполнены с обеспечением их соответствия передней и задней сторонам контейнера (С),
каждое из двух средств (20А, 20В) удерживания контейнера включает в себя: удерживающие приспособления (21а, 21b), которые обеспечивают удерживание боковой поверхности контейнера (С), и пару левых и правых установочных приспособлений (22а, 22b), которые выполнены с возможностью свободного перемещения ближе друг к другу или друг от друга в горизонтальном направлении Y вбок и которые установлены как к левым, так и к правым угловым частям боковой поверхности контейнера (C) для установки контейнера (C) в заданном положении, и
датчик (47) образован посредством излучателя (49a) света, прикрепленного к одному (20А) из средств удерживания контейнера в месте, находящемся рядом с одним (21b) из его удерживающих приспособлений, и приемника (49b) света, прикрепленного к другому (20В) из средств удерживания контейнера в месте, находящемся рядом с одним (21b) из его удерживающих приспособлений.
| JP 2854528 B2, 03.02.1999 | |||
| JP 2010058098 A, 18.03.2010 | |||
| WO 2014142107 A1, 18.09.2014 | |||
| JP H6115608 A, 26.04.1994 | |||
| УСТРОЙСТВО для ПЕРЕДАЧИ ШТУЧНЫХ ГРУЗОВ С ОДНОГО РАБОЧЕГО МЕСТА К ДРУГОМУ | 0 |
|
SU368152A1 |

