1
Изобретение относится к грузоподъемным механизмам, в частности к устройствам для передачи штучных грузов, например ящиков, с одного рабочего места к другому.
Известны устройства для передачи штучных грузов с одного рабочего места к другому, содержащее передвижную по подвесным направляющим раму с захватами.
С целью точной укладки грузов в вертикальные штабели рама предлагаемого устройства выполнена в виде траверсы с телескопическими секциями, нижняя из которых снабжена автоматическим захватом и подвижно установлена относительно промежуточной секции, установленной с возможностью перемещения относительно следующей секции, снабженной Поворотными вокруг горизонтальных осей створками-ловителями. Створки-ловителя предохраняют груз от выпадания при работе устройства в транспортном режиме и взаимодействуют посредством роликов с копирными направляющими верхней секции, несущей механизм опускания захвата и закрепленной на траверсе.
Кроме того, для обеспечения работы устройства в автоматическом режиме оно снабжено механизмом автоматического адресования.
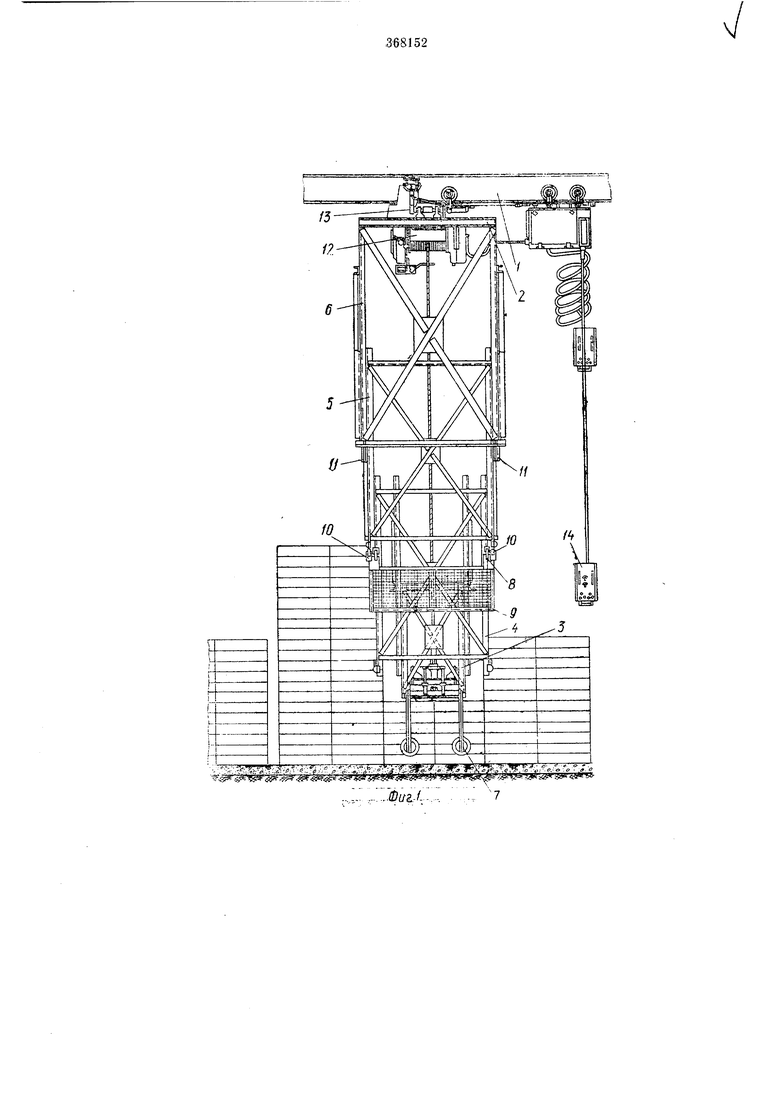
На фиг. 1 изображен общий вид описываемого устройства в рабочем положении; на
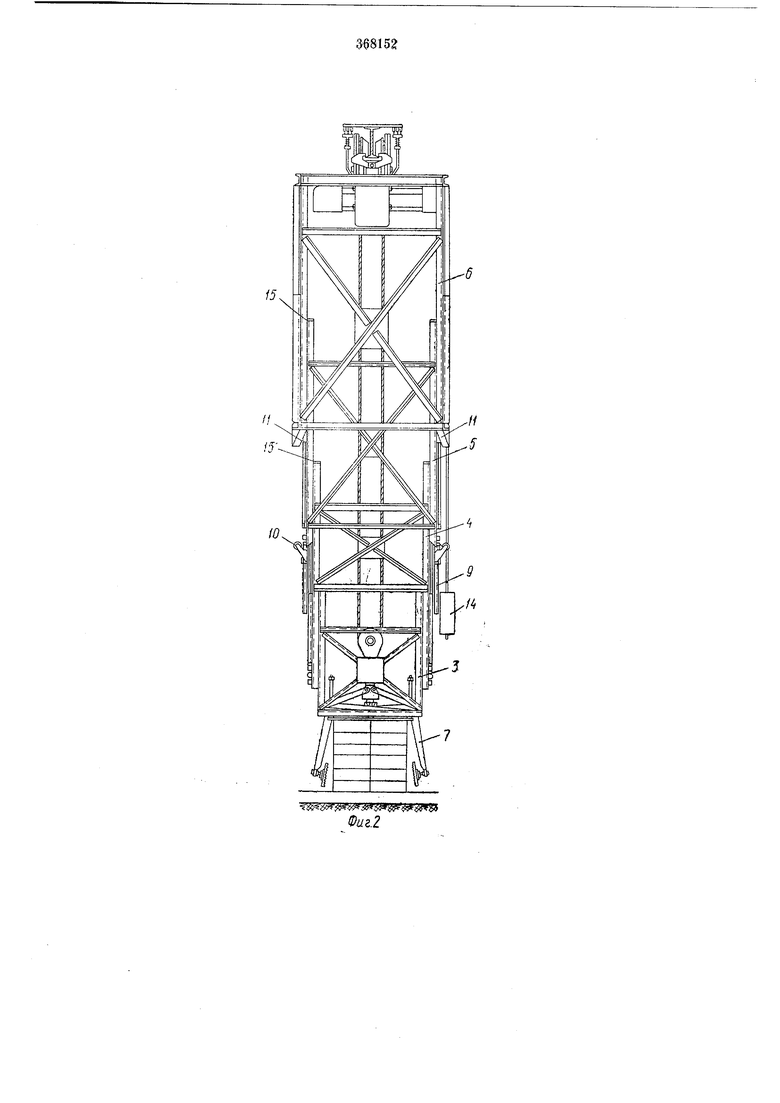
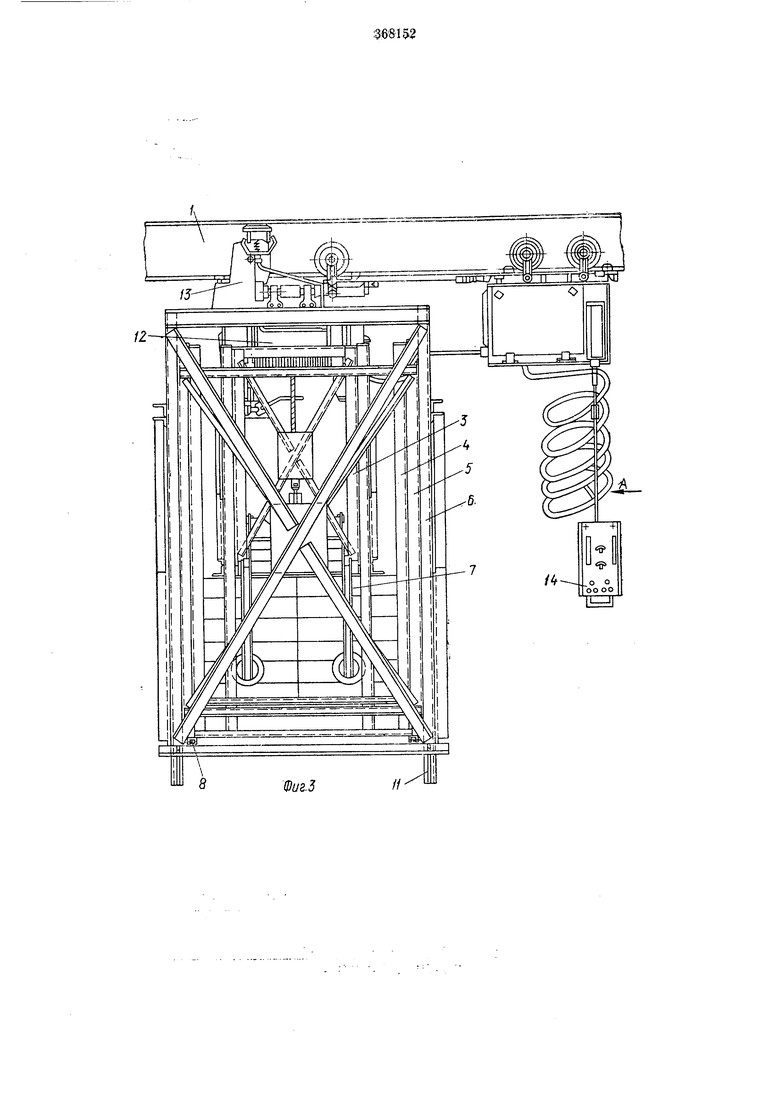
фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, в транспортном положении; на фиг. 4 - вид по стрелке А на фиг. 3; на фиг. 5 - взаимное положение копирных направляющих верхней
секции и ролика створок-ловителей; на фиг. 6- вид по стрелке 5 на фиг. 5.
Описываемое устройство представляет собой передвижную по подвесным направляющим / траверсу 2 с телескопическими секциями 3-6
для точной укладки грузов друг на друга в штабель. Секция 3 снабжена автоматическим захватом 7 и подвижно установлена относительно промежуточной секции 4, которая, в свою очередь, подвижно расположена относительно секции 5. Секция 5 снабжена поворотными вокруг горизонтальных осей 8 створками-ловителями 9, предохраняющими груз от случайного выпадания из захвата 7 во время транспортирования. Створки-ловители 9 имеют
ролики 10, взаимодействующие с копирными направляющими // верхней секции 6, которая вместе с механизмом опускания захвата в виде грузоподъемного барабана 12 крепится к траверсе 2 с установленным на ней механизмом перемещения 13.
Кроме того, устройство снабжено механизмом автоматического адресования 14 для работы в автоматическом режиме. Описываемое устройство работает следующим образом.
Нажатием кнопки на пульте управления механизма автоматического адресования включается грузоподъемный барабан 12. При сматывании троса с -барабана секции 5, 4, S начинают последовательно опускаться под действием собственного веса внутри верхней секции 6.
При опускании секции 5 со створками-ловителями 9 ролики 10 переходят с прямых участков направляющих уголков секции 6 на коиирные направляющие 11, по которым они перекатываются, открывая створки-ловители.
Перемещение вниз каждой внутренней секции ограничивается нижними упорами (на чертежах не показаны), установленными на соседней наружной секции.
Когда автоматический захват 7 ляжет на поверхность груза, все секции останавливаются, а датчик, установленный на захвате, переключает барабан 12 на подъем. Трос, наматываясь на барабан, поднимает автоматический захват 7 с зажатым между лапами грузом.
Поднимаясь, последовательно каждая внутренняя секция своим верхним упором 15 поднимает соседнюю наружную секцию.
При подъеме секции 5 ролики 10, перекатываясь по копирным направляющим 11, поворачивают на осях створки-ловители 9 до закрытого положения . и выходят на прямые участки направляющих уголков секции 6. Далее включением механизма перемещения 13 устройство после задачи адреса на пульте управления механизма адресования 14 направляется по подвесным направляющим 1 к заданному адресу (щтабелю, месту выгрузки).
Предмет изобретения
1.Устройство для передачей щтучных грузов с одного рабочего места к другому, например
ящиков, содержащее передвижную по подвесным направляющим раму с захватами, отличающееся тем, что, с целью точной укладки грузов в вертикальные щтабели, рама устройства выполнена в виде траверсы с телескапическими секциями, нижняя из которых снабжена автоматическим захватом и подвижно установлена относительно промежуточной секции, установленной с возможностью перемещения относительно следующей секции, снабженной поворотными вокруг горизонтальных осей створками-ловителями, предохраняющими груз от выпадания при работе устройства в транспортном режиме и взаимодействующими посредством роликов с копирными направляющиМИ верхней секции, несущей механизм опускания захвата и закрепленной на траверсе.
2.Устройство по п. 1, отличающееся тем, что, с целью обеспечения работы устройства
в автоматическом режиме, оно снабжено механизмом автоматического адресования.
- - ;:M Ju;:; ;E iu iat:i
1Й5 (
.,.. -.
7
fys y fff iyf ffffr S yf y f
Фиг.2
Вид
Фиг4
Фиа5 Вид б
-i I
W
-9
Фиг.6
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛОВИТЕЛИ ГРУЗА | 1970 |
|
SU262353A1 |
| Садчик кирпича на обжиговыеВАгОНЕТКи | 1979 |
|
SU844333A1 |
| Устройство для накопления и выдачи штуч-НыХ гРузОВ | 1978 |
|
SU835892A1 |
| Способ садки кирпича на обжиговые вагонетки и установка для его осуществления | 1983 |
|
SU1143598A1 |
| ШТАБЕЛЕУКЛАДЧИК ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1968 |
|
SU218056A1 |
| Приводная тележка | 1981 |
|
SU983025A1 |
| Устройство для автоматической раскатки бревен | 1938 |
|
SU55724A1 |
| ЛИНИЯ ПОГРУЗОЧНО-РАЗГРУЗОЧНЫХ РАБОТ В ЭКСПЕДИЦИЯХ И ХРАНИЛИЩАХ ХЛЕБОЗАВОДОВ | 1969 |
|
SU255878A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ КИП СПРЕССОВАННОГО ЛЕКАРСТВЕННОГО СЫРЬЯ В КРУПНО-, СРЕДНЕ- И МАЛОТОННАЖНЫЕ КОНТЕЙНЕРЫ | 1999 |
|
RU2150394C1 |