ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к поднимающему/опускающему транспортировочному устройству для контейнера для транспортировки изделия, которое включает в себя, по меньшей мере два набора захватывающих контейнер средств, которые захватывают с обеих сторон контейнер для транспортировки изделия так, чтобы поднимать и опускать контейнер.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[0002] В качестве этого типа поднимающего/опускающего транспортировочного устройства для контейнера для транспортировки изделия известно устройство, в котором, в случае, когда контейнер для транспортировки изделия, подлежащего обработке, представляет собой большой контейнер с открытой/закрытой дверью, предусмотренной на его передней стороне, как описано в патентном документе 1, предусматривается поднимающий/опускающий элемент, подвешенный с перемещающейся основной части типа потолочного перемещающего крана так, чтобы быть свободно поднятым и опущенным, и в котором фитинг, подлежащий зацеплению, предусмотренный на потолочной поверхности большого контейнера или крючок, который свободно прикрепляется и открепляется относительно зазора под нижней поверхностью большого контейнера, предусматривается на нижней стороне поднимающего/опускающего элемента, так что большой контейнер может быть подвешен с нижней стороны поднимающего/опускающего элемента. С другой стороны, заявителем ранее было подана заявка на поднимающее/опускающее транспортировочное устройство для контейнера для транспортировки изделия, которое подходит для случая транспортировки пластикового небольшого контейнера с открытой верхней стороной, который может транспортироваться при поднятии и переносе посредством обеих рук (нерассмотренная заявка на патент Японии №2016-3069). Поднимающее/опускающее транспортировочное устройство для контейнера для транспортировки изделия, согласно этой предыдущей заявке на патент, включает в себя по меньшей мере два набора захватывающих контейнер средств, которые способны свободно перемещаться ближе и дальше от контейнера для транспортировки изделия в горизонтальном направлении и которые свободно поднимаются и опускаются. Захватывающие контейнер средства имеют конфигурацию, в которой со стороны, где находится контейнер, несколько опорных пальцев для контейнера располагаются так, чтобы они могли свободно выступать и втягиваться в горизонтальном направлении и смещаться и удерживаться в положении выступания. Поднимающее/опускающее транспортировочное устройство для контейнера для транспортировки изделия конфигурируется таким образом, что захватывающие контейнер средства посредством опорных пальцев для контейнера вводятся с нижней стороны нависающего ребра, которое нависает горизонтально наружу от внешней поверхности контейнера, путем перемещения к контейнеру, при этом контейнер поддерживается.
В поднимающем/опускающем транспортировочном устройстве для контейнера для транспортировки изделия, согласно предыдущей заявке на патент, описанной выше, фиксированная высота столбчатого опорного элемента, который поддерживает захватывающие контейнер средства так, чтобы поднимать и опускать захватывающие контейнер средства, принимается равной нижнему предельному положению, захватывающее контейнер средство поддерживается на столбчатом опорном элементе так, чтобы свободно подниматься и опускаться, в состоянии, когда захватывающее контейнер средство поддерживается по отношению к столбчатому опорному элементу на нижней предельной высоте, контейнер, захваченный захватывающими контейнер средствами, транспортируется в область, расположенную непосредственно над предполагаемым положением, чтобы затем, когда столбчатый опорный элемент опускается, опустить захваченный контейнер в предполагаемое положение, столбчатый опорный элемент опускается на фиксированную высоту, например, приблизительно от 5 до 10 мм в дополнение к предполагаемой высоте опускания контейнера, а захватывающие контейнер средства, поддерживаемые на нижней предельной высоте на столбчатом опорном элементе, таким образом, приводятся в вертикально свободное состояние. Таким образом, контейнер надежно опускается на поверхность пола зоны хранения или нижняя часть контейнера, подлежащего опусканию, надежно устанавливается в открытую часть контейнера, предварительно помещенного на поверхность пола в зоне хранения так, чтобы опустить контейнер.
Перечень цитируемых источников
Патентные документы
[0003] Патентный документ 1: Опубликованная,
нерассмотренная заявка на патент Японии №Н6-115608.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Техническая проблема
[0004] Однако в конфигурации, описанной выше, когда, для того, чтобы контейнер, подлежащий транспортировке, захватывался захватывающими контейнер средствами, опорные пальцы для контейнера захватывающих контейнер средств изготавливаются так, чтобы входить с нижней стороны нависающего ребра контейнера, а опорные пальцы для контейнера, входящие с верхней стороны нависающего ребра, находятся в состоянии, когда пальцы толкаются вверх нависающим ребром, вес всех захватывающих контейнер средств действует как нагрузка на опорные пальцы для контейнера, которые едут по нависающему ребру. В отличие от этого, когда опорные пальцы для контейнера, входящие непосредственно под нависающее ребро, находятся в состоянии, когда пальцы толкаются вниз нависающим ребром, вес стороны контейнера действует как нагрузка на опорные пальцы контейнера, входящие с нижней стороны нависающего ребра. В любом случае обнаруживается значительно большое сопротивление трению между нависающим ребром и опорными пальцами для контейнера, которые создают скользкий контакт с любой одной из их верхних и нижних поверхностей, и, таким образом, опорные пальцы для контейнера приводятся в состояние, при котором пальцы лишаются возможности легко и гладко перемещаться и устанавливаться. В частности, когда после переноса контейнера опорные пальцы для контейнера захватывающих контейнер средств вытягиваются из нависающего ребра контейнера латерально наружу, из-за того, что сопротивление трению между ними велико, существует возможность того, что контейнер прихватывается латерально наружу и положение смещается.
Решение проблемы
[0005] В настоящем изобретении предлагается поднимающее/опускающее транспортировочное устройство для контейнера для транспортировки изделия, которое может решить обычные проблемы, описанные выше, и для того, чтобы легко понять взаимосвязь с вариантом осуществления, который будет описан ниже, ссылочные позиции, используемые в описании варианта осуществления представлены в скобках. Поднимающее/опускающее транспортировочное устройство для контейнера для транспортировки изделия включает в себя по меньшей мере два набора захватывающих контейнер средств (2А, 2В), которые способны свободно перемещаться ближе и дальше от контейнера для транспортировки изделия (1) в горизонтальном направлении, и которые свободно поднимаются и опускаются. Поднимающее/опускающее транспортировочное устройство для контейнера для транспортировки изделия конфигурируется таким образом, что захватывающие контейнер средства (2А, 2В) имеет конструкцию в форме держателя пальцев, в которой расположены несколько опорных пальцев (15) для контейнера, которые способны свободно выступать и втягиваться в горизонтальном направлении со стороны контейнера (1) и которые смещаются и удерживаются в положении выступания, при этом контейнер (1) поддерживается опорными пальцами (15) для контейнера, которые вводятся посредством перемещения к контейнеру (1), нижняя сторона обращенной вниз поверхности уступа (нижняя поверхность нависающего ребра (1а)), образована снаружи контейнера (1), которое конфигурируется таким образом, что захватывающие контейнер средства (2А, 2В) поддерживаются на опорных элементах (6а, 6b) для поднятия и опускания захватывающих контейнер средств (2А, 2В) так, чтобы свободно подниматься и опускаться, между столбчатыми опорными элементами (6а, 6b) и захватывающими контейнер средствами (2А, 2В) расположен упругий материал (хотя упругий материал представляет собой витую пружину (20) сжатия в варианте осуществления, также вместо этих пружин может использоваться витая пружина натяжения или резиновый материал) для смещения захватывающих контейнер средств (2А, 2В) в направлении подъема, захватывающие контейнер средства (2А, 2В) удерживаются смещающим вверх усилием упругого материала на высоте (Н3) равновесия в равновесии с весом захватывающих контейнер средств (2А, 2В) так, чтобы быть способными перемещаться вертикально с высоты (Н3) равновесия, служащей в качестве центра перемещения, и когда захватывающие контейнер средства (2А, 2В) поднимают контейнер (1), средства захвата (2А, 2В) контейнера, которые принимают вес контейнера (1) и опускаются с высоты (Н3) равновесия, поддерживаются на фиксированной высоте столбчатых опорных элементов (6а, 6b).
Преимущества изобретения
[0006] Согласно конфигурации настоящего изобретения, описанной выше, захватывающее контейнер средство, которое не находится в состоянии поддержки контейнера, удерживается упругим материалом на высоте равновесия в неустойчивом состоянии в направлении вверх/вниз. То есть, поскольку захватывающее контейнер средство находится в состоянии, где его вес уравновешивается, даже при небольшом внешнем усилии, можно легко перемещать захватывающее контейнер средство вертикально. Кроме того, в состоянии, в котором захватывающее контейнер средство поддерживает контейнер, захватывающее контейнер средство, которое принимает вес контейнера и опускается до высоты, меньшей, чем высота равновесия, поддерживается на фиксированной высоте столбчатых опорных элементов. Поэтому на этапе операции приема контейнера, подлежащего транспортировке захватывающим контейнер средством, средства захвата пустого контейнера, удерживаемые на высоте равновесия, опускаются до заданной высоты рядом с контейнером, подлежащем транспортировке, вместе со столбчатыми опорными элементами, и затем перемещаются ближе к контейнеру, подлежащему транспортировке, вместе со столбчатыми опорными элементами. В это время, даже в случае, когда среди множества опорных пальцев для контейнера, включенных в захватывающие контейнер средства, присутствует вертикальный прижимающий палец, который располагается на такой высоте, чтобы ездить по верхней поверхности контейнера, подлежащего транспортировке, или который должен быть надавлен к низу обращенной вниз поверхностью уступа контейнера, подлежащего транспортировке, захватывающее контейнер средство в это время находится в состоянии, где его вес уравновешивается смещающим усилием упругого материала. Следовательно, в соответствии с направленным вверх или вниз усилием, принятым вертикальным прижимающим пальцем от верхней поверхности или обращенной вниз поверхности уступа контейнера, захватывающие контейнер средства сами легко и свободно перемещаются по вертикали, и поэтому вертикальный прижимающий палец может ездить по верхней поверхности контейнера с небольшим сопротивлением трению или может входить под обращенную вниз поверхность уступа контейнера с небольшим сопротивлением трению.
[0007] На этапе операции опускания контейнера, подлежащего транспортировке в предполагаемое положение захватывающим контейнер средством, захватывающее контейнер средство, которое приняло вес контейнера и опустилось до высоты, меньшей, чем высота равновесия, поддерживается на фиксированной высоте столбчатых опорных элементов, следовательно, как и в обычной операции, можно транспортировать контейнер в устойчивом состоянии. Однако, как описано выше, в случае, когда выполняется операция, в которой дополнительно оценивается высота, при которой контейнер, подлежащий транспортировке, должен достичь предполагаемой высоты опускания, захватывающие контейнер средства дополнительно опускаются вместе со столбчатыми опорными элементы на фиксированную высоту так, чтобы надежно опустить контейнер, подлежащий транспортировке на заданную высоту после того, как контейнер, подлежащий транспортировке, опускается в заданное положение, вес контейнера, подлежащего транспортировке больше не действует на захватывающее контейнер средство и одновременно захватывающее контейнер средство принимает направленное вверх смещающее усилие упругого материала. Следовательно, опорный палец контейнера, который располагается непосредственно над обращенной вниз поверхностью уступа контейнера, подлежащего транспортировке в отличие от обычного опорного пальца, не прижимается сильно вниз к верхней поверхности контейнера, подлежащего транспортировке, но опорный палец контейнера, который располагается непосредственно под обращенной вниз поверхностью уступа контейнера, подлежащего транспортировке, то есть палец, который поддерживает контейнер, подлежащий транспортировке во время транспортировки, естественно перемещается вверх до такой высоты, чтобы примыкать к поверхности уступа посредством смещающего усилия упругого материала вместе со захватывающим контейнер средством.
[0008] Следовательно, даже когда выполняется операция, в которой, дополнительно оценивается высота, при которой контейнер, подлежащий транспортировке, должен достичь предполагаемой высоты опускания, захватывающие контейнер средства дополнительно опускаются вместе со столбчатыми опорными элементами на фиксированную высоту, при этом не возникает явления, при котором опорный палец для контейнера сильно прижимается к верхней поверхности контейнера, подлежащего транспортировке. По сути, конечно, в движении втягивания захватывающие контейнер средства, после того, как контейнер опускается в заданное положение, то есть, в операции вытягивания опорного пальца для контейнера в латеральном направлении наружу, даже если присутствует опорный палец для контейнера, который упирается в верхнюю поверхность или обращенную вниз поверхность уступа контейнера, поскольку вертикальное нажимающее усилие, действующее между пальцем и поверхностью на стороне контейнера, является усилием, вызванным смещающим усилием упругого материала для уравновешивания веса захватывающие контейнер средства, сила трения, действующая между ними обоими, существенно меньше, и, следовательно, предотвращается перетаскивание опущенного контейнера латерально, когда опорный палец для контейнера вытягивается.
[0009] В случае, в котором настоящее изобретение реализуется, также возможно разместить упругий материал для подъема захватывающие контейнер средства между захватывающим контейнер средством и столбчатыми опорными элементами так, чтобы сделать захватывающее контейнер средство, удерживаемым на высоте равновесия в равновесии с его весом. В этом случае, на стороне столбчатых опорных элементов, необходимо предусмотреть упоры, которые принимают захватывающие контейнер средства, опущенные с высоты равновесия на заданную высоту, когда захватывающие контейнер средства поддерживают контейнер, подлежащий транспортировке. Однако предпочтительно, когда в столбчатых опорных элементах (6а, 6b) пружинные несущие элементы (18) предусмотрены в положении ниже захватывающих контейнер средств (2А, 2В), и на пружинных несущих элементах (18), на их верхних концах, в качестве упругого материала прикрепляются множество витых пружин (20) сжатия для поддержки захватывающих контейнер средств (2А, 2В). Согласно этой конфигурации, можно повысить устойчивость захватывающих контейнер средств на высоте равновесия.
[0010] В случае, в котором захватывающие контейнер средства поддерживаются витыми пружинами сжатия, как описано выше, захватывающие контейнер средства, которые поддерживают и опускают контейнер, подлежащий транспортировке также могут поддерживаться верхними концами витых пружин сжатия, которые принимают вес контейнера и сжимаются до предела сжатия. Однако предпочтительно, когда отдельно предусматриваются упоры (21а, 21b), которые принимают в положении выше, чем высота верхних концов во время максимального сжатия витых пружин (20) сжатия, захватывающие контейнер средства (2А, 2В), которые опускаются с высоты (Н3) равновесия. Согласно этой конфигурации можно повысить долговечность используемых витых пружин сжатия, чтобы повысить точность предельной высоты опускания захватывающих контейнер средств, которые поддерживают контейнер, подлежащий транспортировке и устойчиво поддерживать захватывающие контейнер средства. Кроме того, хотя может быть использована витая пружина сжатия, которая является цилиндрической с тем же диаметром от нижнего конца до верхнего конца, предпочтительно использовать витую пружину сжатия, которая выполняется в форме конуса, в которой верхний конец для поддержки захватывающих контейнер средств (2А, 2В) имеет минимальный диаметр. Согласно этой конфигурации, пружина сама по себе имеет функцию автоматического выравнивания верхнего конца (верхнего конца, имеющего минимальный диаметр), поэтому можно сделать гладко выполняющееся подъемное/опускающее перемещение захватывающих контейнер средств (2А, 2В) по отношению к столбчатым опорным элементам (6а, 6b). Кроме того, в сравнении с цилиндрической витой пружиной сжатия, можно также значительно уменьшить минимальную длину на пределе сжатия по отношению к максимальной длине во время отсутствия нагрузки, поэтому можно легко увеличить величину опускания захватывающих контейнер средств с высоты равновесия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
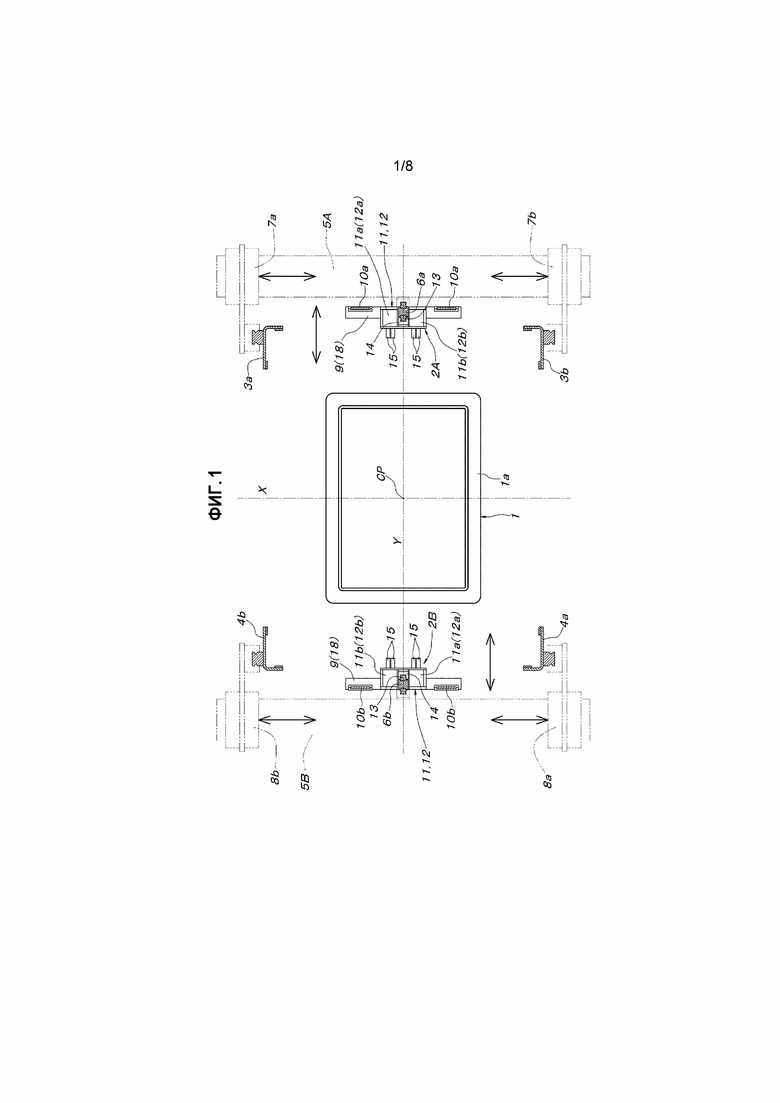
[0011] [Фиг.1] Фиг. 1 - вид сверху, показывающий устройство захвата, которое находится в открытом состоянии относительно контейнера, подлежащего транспортировке.
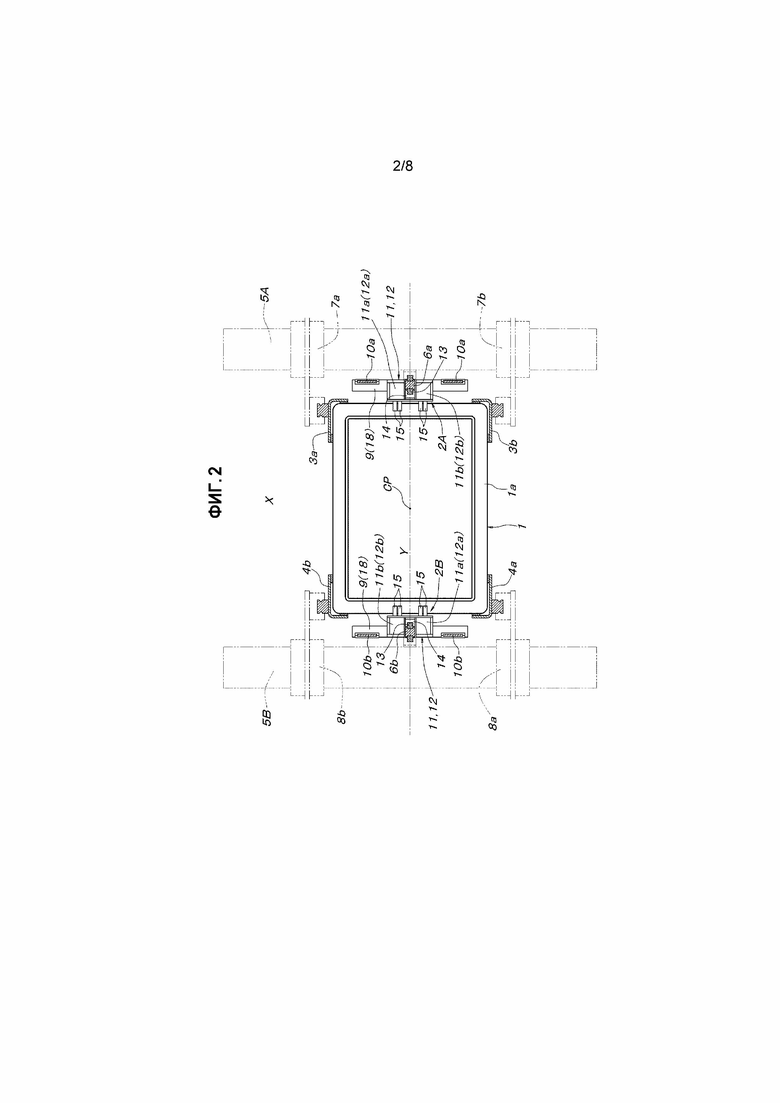
[Фиг.2] Фиг. 2 - вид сверху, показывающий устройство захвата, которое находится в закрытом состоянии относительно контейнера подлежащего транспортировке.
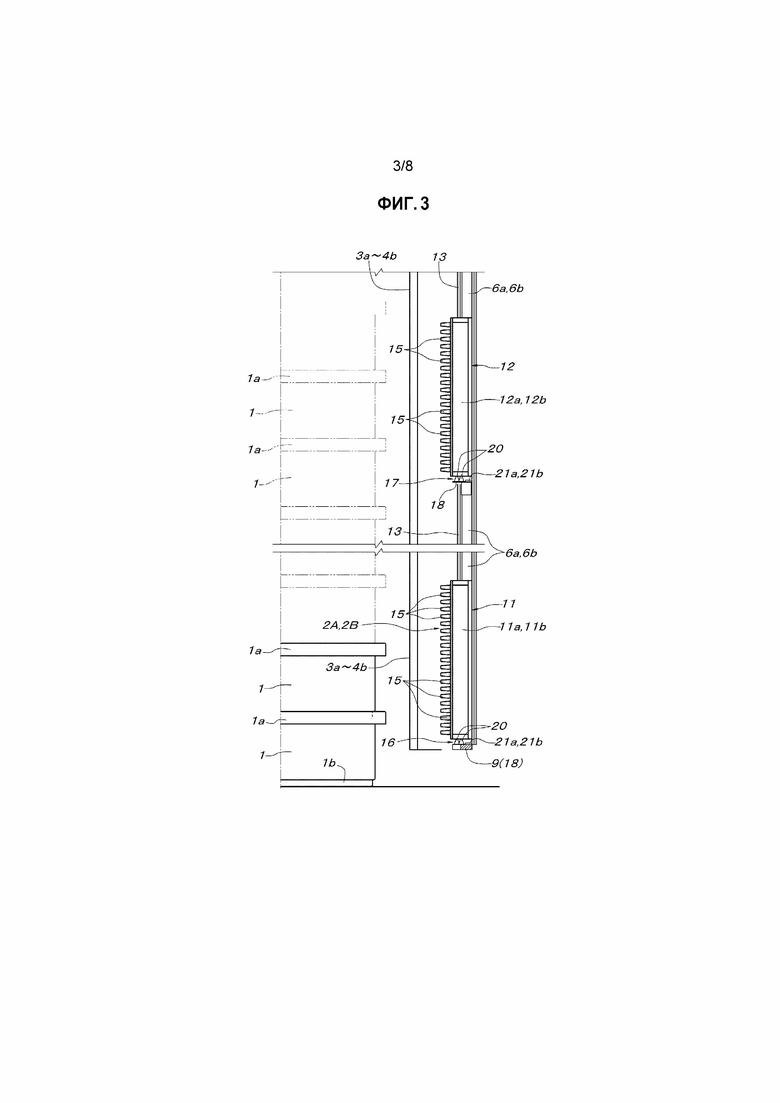
[Фиг.3] Фиг. 3 - вид сбоку, показывающий основную часть устройства захвата, включающую в себя верхние/нижние двухстековые захватывающие контейнер средства.
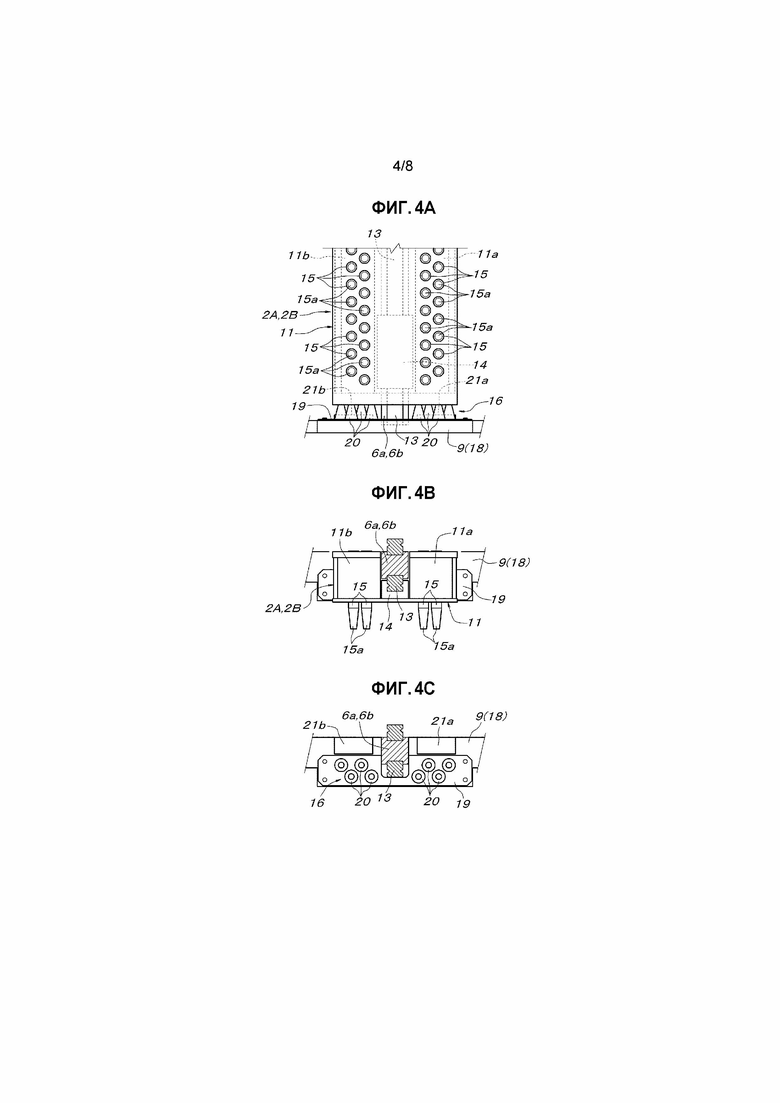
[Фиг.4] Фиг. 4А - вид спереди основной части, показывающей нижние захватывающие контейнер средства, фиг. 4В - вид плоскости поперечного сечения в положении непосредственно над нижними захватывающими контейнер средствами, а фиг. 4С - вид плоскости поперечного сечения в положении непосредственно ниже нижних захватывающих контейнер средств.
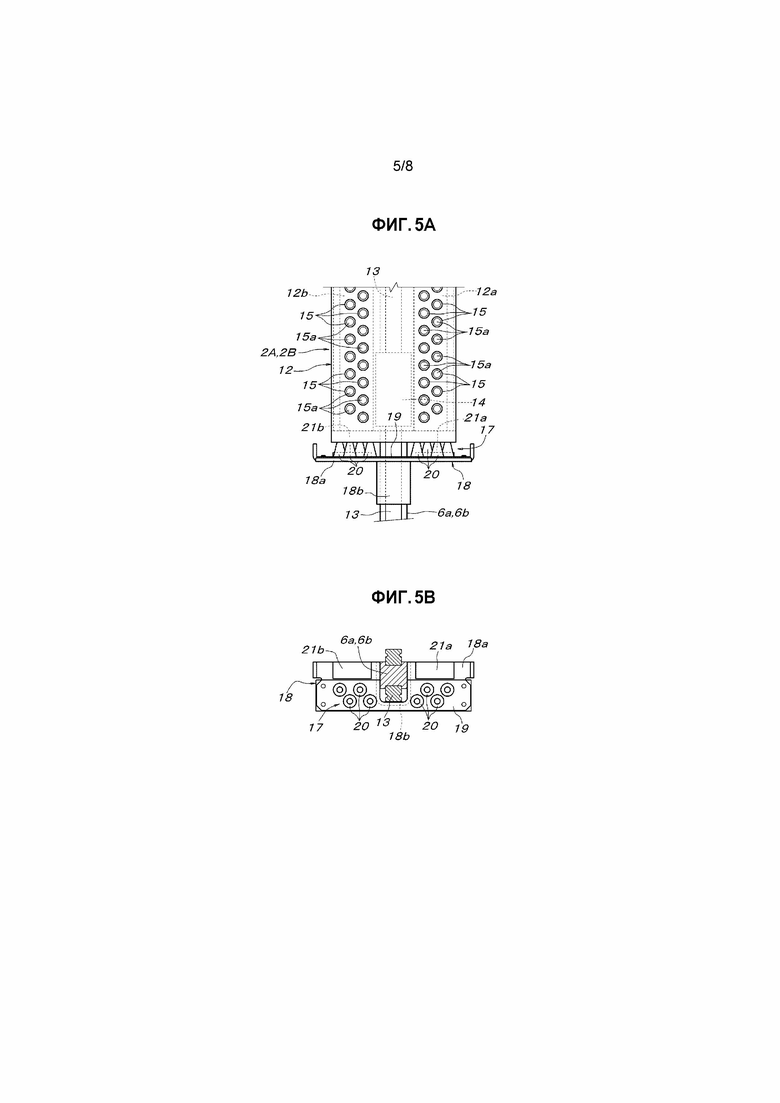
[Фиг.5] Фиг. 5А - вид спереди основной части, показывающей верхние захватывающие контейнер средства, а фиг. 5В - вид плоскости поперечного сечения в положении непосредственно ниже верхних захватывающих контейнер средств.
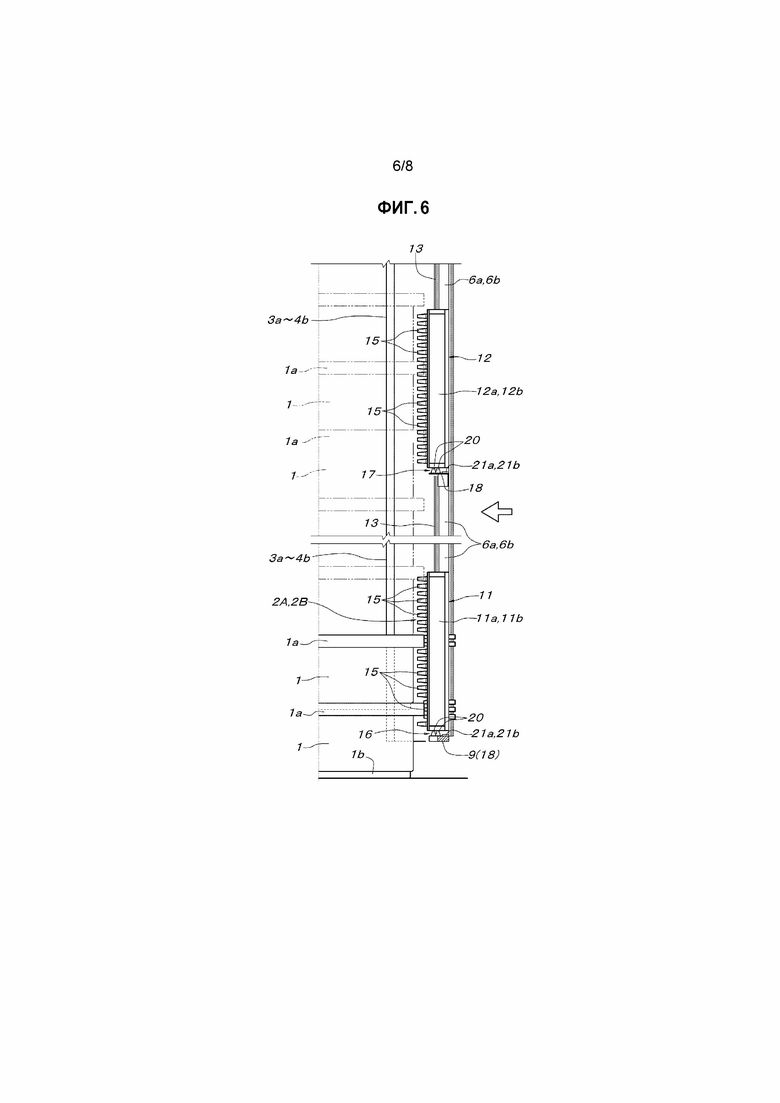
[Фиг.6] Фиг. 6 - вид сбоку основной части, показывающей, как устройство захвата, показанное на фиг. 3, захватывает контейнер.
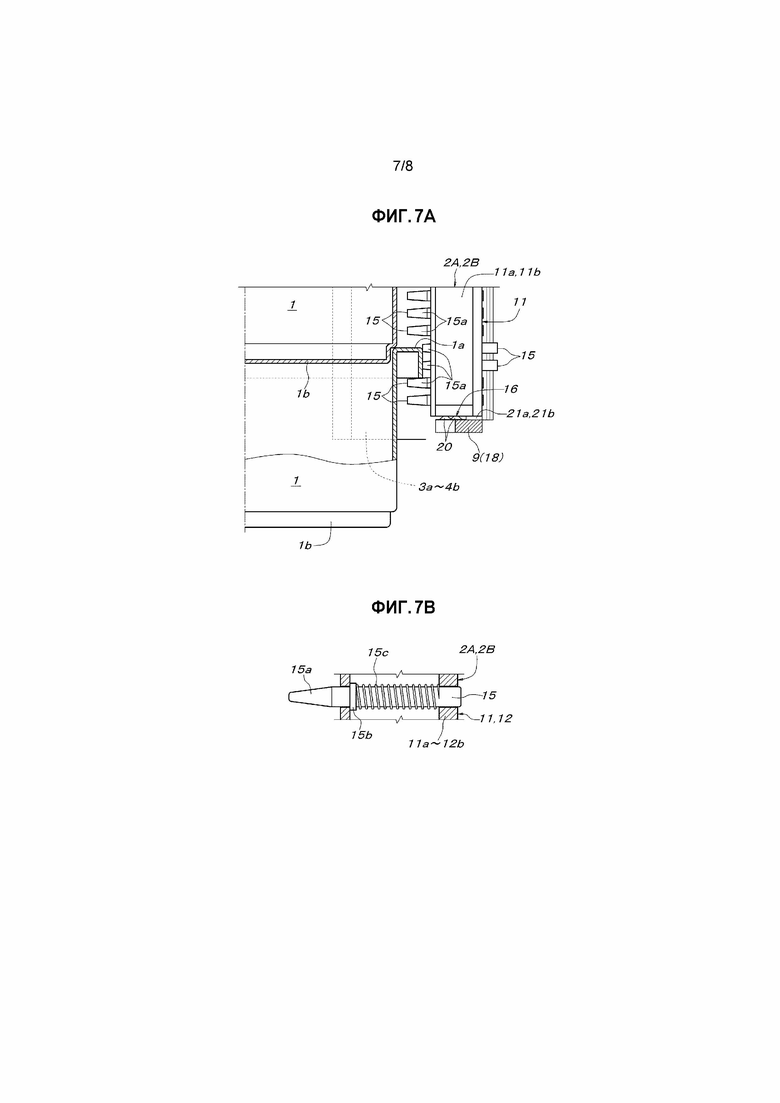
[Фиг.7] Фиг. 7А - вид сбоку в продольном сечении основной части, показывающий состояние, в котором захватывающее контейнер средство поднимает контейнер, а фиг. 7В - увеличенный вид сбоку в продольном сечении основной части, показывающий внутреннюю конструкцию захватывающие контейнер средства.
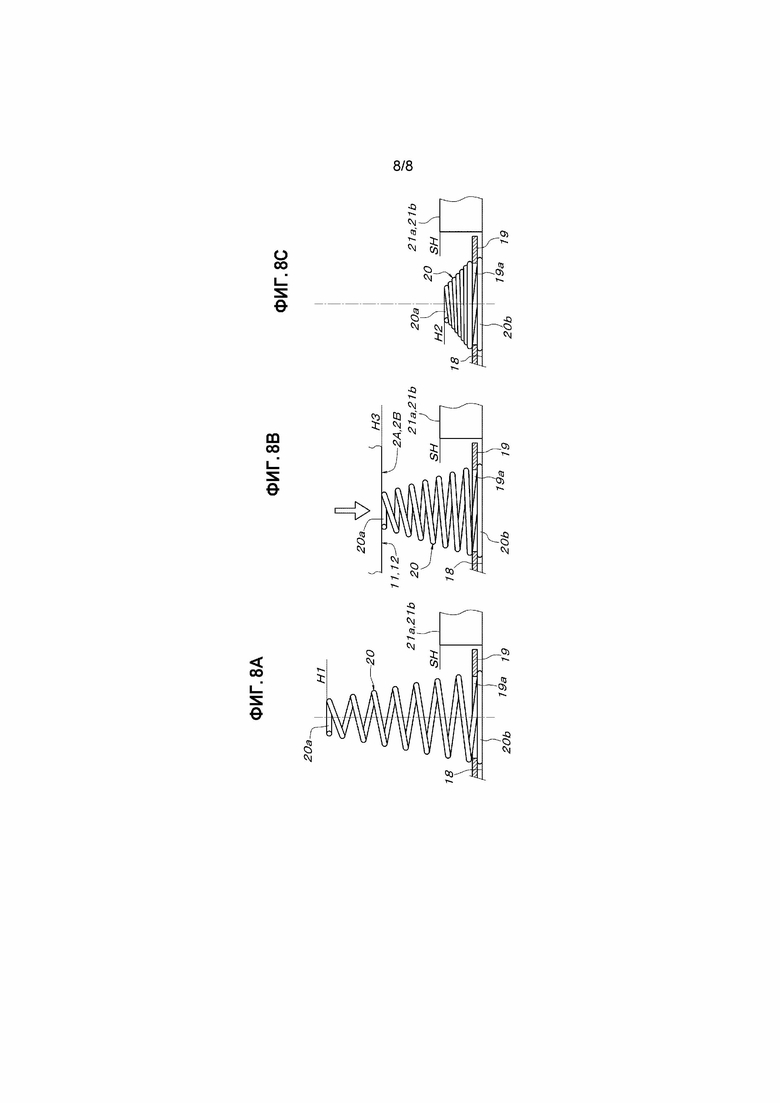
[Фиг.8] Фиг. 8А-8С - выполненные частично боковые виды в продольном сечении основной части, иллюстрирующие подробную конструкцию и действие пружины, поддерживающей захватывающие контейнер средства.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0012] Поднимающее/опускающее транспортировочное устройство для контейнера для транспортировки изделия, согласно настоящему варианту осуществления, показанного на прилагаемых чертежах, имеет такую же основную конструкцию, как то, что показано в описании и чертежах ранее описанного предыдущего изобретения патентной заявки (изобретение, раскрытое в японской опубликованной, нерассмотренной патентной заявке №2016-3069), как показано на фиг. 1-3, устройство поднимает и транспортирует пластиковый контейнер для транспортировки изделия, который является достаточно маленьким, чтобы его можно было поднимать и переносить обеими руками, и который может быть уложен в стопку (в дальнейшем коротко обозначенный как контейнер) 1. Поднимающее/опускающее транспортировочное устройство включает в себя пару захватывающих контейнер средств 2А и 2В, которые захватывают обе стороны контейнера 1, расположенного в центральном положении CP, параллельного к расположенной горизонтально линии X, изображаемой в вертикальном направлении (расположенной горизонтально линии X, изображаемой в вертикальном направлении) и к расположенной горизонтально линии Y, изображаемой в латеральном направлении, которые проходят через центральное положение CP на виде сверху поднимающего/опускающего транспортировочного устройства и которые перпендикулярны друг другу, и четыре позиционирующих элемента 3а-4b, которые подгоняются к четырем углам контейнера 1 для позиционирования. Ниже будет приведено описание с предположением, что направление, параллельное к расположенной горизонтально линии X, изображаемой в вертикальном направлении, является «горизонтально-вертикальным» направлением и что направление, параллельное к расположенной горизонтально линии Y, изображаемой в латеральном направлении, является «горизонтально-латеральным» направлением.
[0013] Над перемещающейся в «горизонтально-латеральном» направлении парой захватывающих контейнер средств 2А и 2В, предусматриваются латерально перемещающиеся основания 5А и 5В, которые образованы с горизонтальными элементами, которые тянутся в «горизонтально-вертикальном» направлении и которые способны свободно перемещаться ближе и дальше друг от друга в «горизонтально-латеральном» направлении, сохраняя тем временем симметричные положения относительно расположенной горизонтально линии X, изображаемой в вертикальном направлении. На внутренние стороны центров латерально перемещающихся оснований 5А и 5В, пересекающиеся с расположенной горизонтально линией Y, изображаемой в латеральном направлении, прикрепляются столбчатые опорные элементы 6а и 6b так, что они могли бы свободно подниматься и опускаться. Захватывающие контейнер средства 2А и 2В прикрепляются к внутренним сторонам соответствующих столбчатых опорных элементов 6а и 6b на одной и той же высоте. Передвижные основания 7а-8b поддерживаются на обеих оконечных частях соответствующих латерально перемещающихся оснований 5А и 5В в направлении его длины так, чтобы быть способными свободно перемещаться ближе и дальше друг от друга в «горизонтально-вертикальном» направлении, сохраняя симметричные положения относительно расположенной горизонтально линии Y, изображаемой в латеральном направлении, а соответствующие позиционирующие элементы 3а-4b поддерживаются на соответствующих передвижных основаниях 7а-8b так, чтобы свободно подниматься и опускаться. Каждый из позиционирующих элементов 3а-4b выполняется посредством формованного элемента, поперечная часть которого выполняется в форме буквы L в направлении, которое может быть подогнано к четырем углам контейнера 1 и продолжается в вертикальном направлении вверх/вниз.
[0014] Согласно конфигурации, описанной выше, путем перемещения обоих латерально перемещающихся оснований 5А и 5В ближе друг к другу в «горизонтально-латеральном» направлении, и одновременного перемещения соответствующих передвижных оснований 7а, 7b, 8а и 8b ближе друг к другу в «горизонтально-вертикальном» направлении, относительно соответствующих латерально перемещающихся оснований 5А и 5В, как показано на фиг. 2, центральные части обеих сторон контейнера 1 в «горизонтально-латеральном» направлении, могут быть захвачены движущейся в «горизонтально-латеральном» направлении парой захватывающих контейнер средств 2А и 2В, и одновременно соответствующие позиционирующие элементы 3а-4b могут быть подогнаны к четырем углам контейнера 1. Обе латерально перемещающиеся основания 5А и 5В поддерживаются на фиксированной высоте над поверхностью пола зоны хранения контейнера на транспортировочной тележке, способной перемещаться в «горизонтально-вертикальном» направлении, и «горизонтально-латеральном» направлении, а столбчатые опорные элементы 6а и 6b, к которым захватывающие контейнер средства 2А и 2В, соответственно, прикрепляются, индивидуально приводятся в действие посредством двух поднимающих/опускающих приводных, плоских ремней 10а и 10b относительно соответствующих латерально перемещающихся оснований 5А и 5В. Нижние концы этих соответствующих двух поднимающих/опускающих приводных, плоских ремней 10а и 10b соединяются с обоими оконечными частями горизонтальных элементов 9, которые прикрепляются к нижним концам столбчатых опорных элементов 6а и 6b так, чтобы быть нависающими с обеих сторон в «горизонтально-вертикальном» направлении. Позиционирующие элементы 3а и 3b выполняют поднимающие/опускающие перемещения по отношению к соответствующим передвижным основаниям 7а и 7b в синхронизации с повышающим/опускающим перемещением столбчатого опорного элемента ба, расположенного в его промежуточном положении, а позиционирующие элементы 4а и 4b выполняют поднимающие/опускающие перемещения по отношению к соответствующим передвижным основаниям 8а и 8b в синхронизации с повышающим/опускающим перемещением столбчатого опорного элемента 6а, расположенного в его промежуточном положении.
[0015] Перемещающаяся в «горизонтально-латеральном» направлении пара захватывающих контейнер средств 2А и 2В включает в себя нижние единые элементы 11, которые прикрепляются к нижним оконечным частям столбчатых опорных элементов 6а и 6b, и верхние единые элементы 12, которые прикрепляются к столбчатым опорным элементам 6а и 6b в положениях кверху от нижних единых элементов 11 на соответствующем расстоянии, и соответствующие единые элементы 11 и 12 имеют одинаковую конструкцию и включают в себя, как показано на фиг. 1 и 2, параллельные обоймы 11а-12b, которые располагаются с обеих сторон столбчатых опорных элементов 6а и 6b и которые тянутся в вертикальном направлении. Между параллельными обоймами 11а и 11b и между параллельными обоймами 12а и 12b прикрепляется пара верхних и нижних направляющих узлов 14, которые устанавливаются на поднимающих/опускающих направляющих рельсах 13, предусмотренных на внутренних сторонах столбчатых опорных элементов 6а и 6b так, чтобы свободно подниматься и опускаться, и нижние единые элементы 11 и верхние единые элементы 12, таким образом, свободно поднимаются и опускаются относительно столбчатых опорных элементов 6а и 6b. Опорные пальцы 15 для контейнера индивидуально поддерживаются в двух рядах по вертикали в обоймах 11а-12b, на виде сверху, в симметричных положениях относительно расположенной горизонтально линии Y, изображаемой в латеральном направлении.
[0016] Эти опорные пальцы 15 для контейнера располагаются, как показано на фиг. 4А и 5А так что, если смотреть на вид спереди со стороны центрального положения CP, два опорных пальца 15 для контейнера на одинаковой высоте с узким расстоянием в «горизонтально-вертикальном» направлении и два опорных пальца 15 на одинаковой высоте с широким расстоянием в «горизонтально-вертикальном» направлении поочередно располагаются в направлении вверх/вниз на соответствующем расстоянии друг от друга. Как показано на фиг. 7В, в каждом из опорных пальцев 15 для контейнера, часть 15а с заостренным концом для поддержки контейнера, который выступает из обойм 11а-12b, обрабатывается так, чтобы быть сужающейся, опорный палец 15 для контейнера включает в себя упор 15b, который примыкает к внутренней стороне пластины стенки передней стороны обойм 11а-12b, а его задний конец имеет такую длину, чтобы проникать через пластину стенки задней стороны обойм 11а-12b. Каждый из опорных пальцев 15 для контейнера смещается и удерживаются посредством витой пружины 15 с сжатия, свободно установленной на опорном пальце 15 для контейнера между упором 15b и пластиной стенки задней стороны обойм 11а-12b в состоянии, в котором часть 15а с заостренным концом для поддержки контейнера выступает с заданной длиной из обойм 11а-12b.
[0017] Как показано на фиг. 3-5В, в нижних единых элементах 11 и верхних единых элементах 12 захватывающих контейнер средств 2А и 2В, сконфигурированных, как описано выше, нижние его концы поддерживаются посредством опорных средств 16 и 17 на столбчатых опорных элементах 6а и 6b. Соответствующие верхние и нижние опорные средства 16 и 17 выполняются с пружинными несущими элементами 18, которые прикрепляются к столбчатым опорным элементам 6а и 6b, с множеством витых пружин 20 сжатия, которые прикрепляются посредством пластин 19 для крепления пружин на пружинных несущих элементах 18, и с расположенной в «горизонтально-вертикальном» направлении парой упоров 21а и 21b, которые изготавливаются из упругого материала. Эти упоры 21а и 21b прикрепляются отдельно на задней стороне пластины 19 для крепления пружин на пружинном несущем элементе 18 к обеим сторонам столбчатых опорных элементов 6а и 6b в «горизонтально-вертикальном» направлении. В качестве пружинных несущих элементов 18 нижнего опорного средства 16 для поддержки нижних единых элементов 11, используются горизонтальные элементы 9, которые прикрепляются к нижним концам столбчатых опорных элементов 6а и 6b и с которыми нижние концы поднимающих/опускающих приводных плоских ремней 10а и 10b соединяются, как они есть. Как показано на фиг. 5А и 5В, пружинные несущие элементы 18 верхнего опорного средства 17 для поддержки верхних единых элементов 12 формируются с горизонтальными пластинами 18а, которые имеют, в их центре, вогнутые входные части, на их внутренних сторонах, в которые входят столбчатые опорные элементы 6а и 6b и поднимающие/опускающие направляющие рельсы 13, а также U-образные пластины 18b, которые располагаются на нижних сторонах горизонтальных пластин 18а, и которые верхним концом прикрепляются к внутренним сторонам вогнутых входных частей. U-образные пластины 18b прикрепляются к столбчатым опорным элементам 6а и 6b.
[0018] Как показано на фиг. 8А-8С, витая пружина 20 сжатия в каждом из опорных средств 16 и 17 выполняется в форме конуса, в котором часть 20а с верхним крайним кольцом для приема нижней поверхности (нижней поверхности каждой из обойм 11а - 12b) каждого из верхних и нижних единых элементов 11 и 12 имеет минимальный диаметр. В пластине 19 для крепления пружин предусматривается отверстие 19а для крепления, внутренний диаметр которого меньше, чем внешний диаметр части 20b с нижним крайним кольцом, имеющим максимальный диаметр витой пружины 20 сжатия. В состоянии, в котором часть 20b с нижним крайним кольцом витой пружины 20 сжатия изготавливается, чтобы войти в нижнюю сторону отверстия 19а крепления, часть 20b с нижним крайним кольцом и пластина 19 для крепления пружины закрепляются, например, посредством точечной сварки, и, таким образом, множество витых пружин 20 сжатия прикрепляются на пластинах 19 для крепления пружин, так что витые пружины 20 сжатия соответствующим образом выравниваются, например, как показано на фиг. 4С и 5В, четыре витые пружины 20 сжатия выравниваются так, чтобы поддерживать каждую из обойм 11а-12b. Затем пластина 19 для крепления пружин располагается на пружинном несущем элементе 18 со стороны столбчатых опорных элементов 6а и 6b и в состоянии, когда части 20b с нижними крайними кольцами витых пружин 20 сжатия зажимаются между пластиной 19 для крепления пружин и пружинным несущим элементом 18, оба конца пластины 19 для крепления пружин прикрепляются к пружинному несущему элементу 18 посредством, например, болтов и гаек.
[0019] Коническая витая пружина 20 сжатия в каждом из опорных средств 16 и 17 деформируется, принимая усилие сжатия с максимальной высоты H1 удлинения в состоянии отсутствия нагрузки, показанном на фиг. 8А, до высоты Н2 во время максимального сжатия, показанного на фиг. 8С. Когда витая пружина 20 сжатия находится на высоте Н2 в момент максимального сжатия, показанного на фиг. 8С, она находится в состоянии, когда часть с кольцом малого диаметра на верхней стороне входит внутрь части с кольцом большого диаметра на нижней стороне так, что они примыкают друг к другу, и поэтому высота витой пружины 20 сжатия ниже высоты, полученной путем сложения диаметров проволок с учетом количества витков. Разумеется, также может быть использована коническая витая пружина сжатия, в которой часть с кольцом малого диаметра на верхней стороне полностью входит внутрь части с кольцом большого диаметра на нижней стороне, так что части с кольцами со всеми витками входят в спиральную форму внутри одной части с кольцом, контактирующим с верхней поверхностью пластины 19 для крепления пружины.
[0020] В любом случае, как показано на фиг. 8С, в витой пружине 20 сжатия, высота Н2 во время максимального сжатия ниже высоты SH упоров 21а и 21b, прикрепленных к тому же пружинному несущему элементу 18, а максимальная высота H1 удлинения существенно выше, чем высота SH упоров 21а и 21b. Когда соответствующие верхние и нижние единые элементы 11 и 12 захватывающих контейнер средств 2А и 2В в состоянии отсутствия нагрузки, когда контейнер 1 не захватывается, поддерживаются соответствующими опорными средствами 16 и 17, отдельные витые пружины 20 сжатия в каждом из опорных средств 16 и 17, как показано на фиг. 8В, сжимаются и деформируются так, чтобы иметь высоту в равновесии с весом каждого из единых элементов 11 и 12, в результате чего соответствующие единые элементы 11 и 12 поддерживаются на высоте Н3 равновесия. Высота Н3 равновесия в это время выше высоты SH упоров 21а и 21b. Кроме того, как будет описано ниже, размер и прочность витых пружин 20 сжатия устанавливаются таким образом, что когда нижние единые элементы 11 или оба верхние и нижние единые элементы 11 и 12 в захватывающих контейнер средствах 2А и 2В захватывают и поднимают заданный контейнер 1 посредством соответствующих опорных пальцев 15 для контейнера, нижние единые элементы 11 или оба верхние и нижние единые элементы 11 и 12 принимают вес контейнера 1 и опускаются одновременно со сжатием и деформацией витых пружин 20 сжатия опорных средств 16 и 17, и единые элементы 11 и 12 принимаются упорами 21а и 21b, изготовленными из упругого материала, до того, как витые пружины 20 сжатия достигнут высоты Н2 во время максимального сжатия.
[0021] Как показано на фиг. 1-3 и 7А контейнер 1, который манипулируется в поднимающем/опускающем транспортировочном устройстве, сконфигурированном, как описано выше, имеет четырехугольную плоскую форму, и контейнер 1 выполняется в форме коробки с открытой верхней стороной, нависающим ребром 1а, которое нависает наружу для армирования, и формирования рукоятки и выполняется как единое целое вокруг части с отверстием, и частью 1b основания с выступом, которая имеет такой размер, чтобы быть способной подходить ко внутренней части с отверстием в другом контейнере 1, и выполняется как единое целое на нижней части. Следовательно, в контейнере 1 нижняя поверхность нависающего ребра 1а служит в качестве обращенной вниз поверхности уступа, а верхняя поверхность нависающего ребра 1а служит в качестве верхней поверхности контейнера 1. Следует отметить, что конструкция контейнера 1 не ограничивается конструкцией, показанной на чертежах. Например, может быть приспособлен контейнер, в котором вблизи верхнего конца периферийной поверхности стенки образуется часть с вогнутой канавкой, параллельная периферийному направлению, и в котором верхняя поверхность внутренней части вогнутой канавки служит в качестве обращенной вниз поверхности уступа.
[0022] Внутри зоны хранения контейнера 1, где дополнительно предусматривается поднимающее/опускающее транспортировочное устройство, сконфигурированное, как описано выше, контейнеры 1 располагаются в таком направлении, что четыре их стороны параллельны «горизонтально-вертикальному» направлению и «горизонтально-латеральному» направлению. Затем в случае, когда конкретный контейнер 1 из них транспортируется из положения в другое место, как показано на фиг. 1, поднимающее/опускающее транспортировочное устройство изготавливается перемещать так, чтобы центральное положение CP поднимающего/опускающего транспортировочного устройства соответствовало центральному положению контейнера 1, подлежащего транспортировке на виде сверху, и останавливалось в положении непосредственно над контейнером 1, подлежащим транспортировке. Затем в состоянии, в котором захватывающие контейнер средства 2А и 2В и соответствующие позиционирующие элементы 3а-4b располагаются снаружи контейнера 1, подлежащего транспортировке на виде сверху, поднимающие/опускающие приводные плоские ремни 10а и 10b приводятся в движение так, чтобы опустить перемещающуюся в «горизонтально-латеральном» направлении пару столбчатых опорных элементов 6а и 6b и четыре позиционирующих элемента 3а-4b и, как показано на фиг. 3, нижние единые элементы 11 соответствующих захватывающих контейнер средств 2А и 2В и соответствующие позиционирующие элементы 3а-4b располагаются непосредственно рядом с нависающим ребром 1а контейнера 1, подлежащего транспортировке (непосредственно рядом с нависающим ребром 1а самого нижнего контейнера 1, когда, как показано на фиг. 3, множество контейнеров 1, уложенных в стопку вертикально, подлежат транспортировке). В данный момент имеет место случай, когда контейнер 1, подлежащий транспортировке, представляет собой несколько контейнеров, уложенных в стопку и контейнер (контейнеры) 1, подлежащий транспортировке, также располагается на внутренней стороне верхних единых элементов 12 в захватывающих контейнер средствах 2А и 2В.
[0023] Захватывающие контейнер средства 2А и 2В и соответствующие позиционирующие элементы 3а-4b опускаются до заданной высоты, как описано выше, затем боковые латерально перемещающиеся основания 5А и 5В перемещаются ближе друг к другу в «горизонтально-латеральном» направлении, и передвижные основания 7а-8b на соответствующих латерально перемещающихся основаниях 5А и 5В перемещаются ближе друг к другу в «горизонтально-вертикальном» направлении и, таким образом, как показано на фиг. 2 и 6, соответствующие позиционирующие элементы 3а-4b подгоняются к четырем углам контейнера 1, подлежащего транспортировке, и одновременно контейнер 1, подлежащий транспортировке, зажимается с обеих сторон в «горизонтально-латеральном» направлении обоими захватывающими контейнер средствами 2А и 2В. Следовательно, как показано на фиг. 6 и 7А, среди опорных пальцев 15 для контейнера обоих верхнего и нижнего единых элементов 11 и 12 в обоих захватывающих контейнер средствах 2А и 2В, заостренный конец опорного пальца 15 для контейнера на высоте, обращенной к нависающему ребру 1а контейнера 1, подлежащего транспортировке, упирается во внешнюю поверхность нависающего ребра 1а так, чтобы предотвратить его перемещение вперед. Следовательно, опорный палец 15 для контейнера относительным образом втягивается в обоймы 11а-12b против смещающего усилия витой пружины 15 с сжатия, и только другие опорные пальцы 15 для контейнера перемещаются близко к внешней поверхности контейнера 1, подлежащего транспортировке, одновременно удерживаемые в положении выступания, благодаря смещающему усилию витой пружины 15 с сжатия.
[0024] Как описано выше, в процессе, в котором контейнер 1, подлежащий транспортировке, зажимается с обеих сторон в «горизонтально-латеральном» направлении посредством обоих захватывающих контейнер средств 2А и 2В, которые перемещаются ближе друг к другу в «горизонтально-латеральном» направлении, весьма вероятно, что среди опорных пальцев 15 для контейнера, удерживаемых в положении выступания под действием смещающего усилия витой пружины 15 с сжатия, присутствует опорный палец 15 для контейнера, который перемещается вперед, одновременно нажимая в направлении вверх/вниз, на верхнюю поверхность или нижнюю поверхность нависающего ребра 1а в контейнере 1, подлежащем транспортировке. С другой стороны, соответствующие верхние и нижние единые элементы 11 и 12, которые поддерживают опорные пальцы 15 для контейнера, так что опорные пальцы 15 для контейнера способны свободно выступать и втягиваться, поддерживаются, как показано на фиг. 8В, витой пружиной 20 сжатия опорных средств 16 и 17 на высоте Н3 равновесия в равновесии с их весом и, следовательно, находятся в состоянии, когда они могут перемещаться свободно плавающими в направлении вверх/вниз.
[0025] Следовательно, в случае, когда присутствует конкретный опорный палец 15 для контейнера, который перемещается вперед, одновременно нажимая на верхнюю поверхность нависающего ребра 1а в контейнере 1, подлежащем транспортировке, в сочетании с тем фактом, что часть 15а заостренного конца для поддержки контейнера каждого из опорных пальцев 15 для контейнера выполняется в форме зауженного конуса, одновременно благодаря прижимающему действующему усилию в направлении вверх/вниз между конкретным опорным пальцем 15 для контейнера и верхней поверхностью нависающего ребра 1а в контейнере 1, подлежащем транспортировке, все единые элементы 11 и 12, имеющие конкретный опорный палец 15 для контейнера, перемещаются вверх вдоль столбчатых опорных элементов ба и 6b в направлении, в котором действует направленное вверх смещающее усилие витых пружин 20 сжатия в опорных средствах 16 и 17, часть 15а заостренного конца для поддержки контейнера конкретного опорного пальца 15 для контейнера едет по верхней поверхности нависающего ребра 1а в контейнере 1, подлежащем транспортировке таким образом, чтобы быть способным надежно переместится в переднее предельное положение. Напротив, даже в случае, когда присутствует конкретный опорный палец 15 для контейнера, который перемещается вперед, одновременно нажимая на нижнюю поверхность нависающего ребра 1а в контейнере 1, подлежащем транспортировке, в сочетании с тем фактом, что часть 15а заостренного конца для поддержки контейнера каждого из опорных пальцев 15 для контейнера выполняется в форме зауженного конуса, одновременно благодаря прижимающему действующему усилию в направлении вверх/вниз между конкретным опорным пальцем 15 для контейнера и нижней поверхностью нависающего ребра 1а в контейнере 1, подлежащем транспортировке, все единые элементы 11 и 12, имеющие конкретный опорный палец 15 для контейнера перемещаются вниз вдоль столбчатых опорных элементов 6а и 6b против направленного вверх смещающего усилия витой пружины 20 сжатия в опорных средствах 16 и 17, часть 15а заостренного конца для поддержки контейнера конкретного опорного пальца 15 для контейнера входит ниже нижней поверхности нависающего ребра 1а в контейнере 1, подлежащем транспортировке таким образом, чтобы быть способным надежно переместится в переднее предельное положение.
[0026] Как описано выше, когда, как показано на фиг. 6, контейнер 1, подлежащий транспортировке, зажимается с обеих сторон в «горизонтально-латеральном» направлении посредством обоих захватывающих контейнер средств 2А и 2В, которые перемещаются ближе друг к другу в «горизонтально-латеральном» направлении, поднимающие/опускающие приводные плоские ремни 10а и 10b приводятся в движение в противоположном направлении так, чтобы поднять перемещающуюся в «горизонтально-латеральном» направлении пару столбчатых опорных элементов 6а и 6b и четыре позиционирующих элемента 3а-4b. Следовательно, как показано на фиг. 7А, среди опорных пальцев 15 для контейнера обоих захватывающих контейнер средств 2А и 2В, часть 15а заостренного конца для контейнера действующего опорного пальца 15 для контейнера, который входит непосредственно под нависающее ребро 1а контейнера 1, подлежащего транспортировке, поднимает контейнер 1, подлежащий транспортировке. В этот момент вес контейнера 1, подлежащего транспортировке действует, через действующие опорные пальцы 15 для контейнера к низу на единые элементы 11 и 12, имеющие действующие опорные пальцы 15 для контейнера, и единые элементы 11 и 12, следовательно, опускаются, одновременно дополнительно сжимая и деформируя витые пружины 20 сжатия опорных средств 16 и 17 с высоты Н3 равновесия, показанной на фиг. 8В, а затем принимаются упорами 21а и 21b. Другими словами, вес контейнера 1, подлежащего транспортировке, надежно принимается столбчатыми опорными элементами 6а и 6b через действующие опорные пальцы 15 для контейнера обоих захватывающих контейнер средств 2А, 2В, при этом единые элементы 11 и 12 имеют действующие опорные пальцы 15 для контейнера и упоры 21а и 21b, изготовленные из упругого материала, и, таким образом, можно устойчиво поднимать контейнер 1, подлежащий транспортировке. Так как в подъеме, описанном выше, позиционирующие элементы 3а-4b подгоняются к четырем углам контейнера 1, подлежащего транспортировке так, чтобы позиционировать контейнер 1, подлежащий транспортировке, даже множество контейнеров 1, уложенных в стопку, может быть устойчиво поднято и транспортировано без разворота контейнеров 1.
[0027] Когда контейнер 1, который поднимается и транспортируется поднимающим/опускающим транспортировочным устройством таким образом, опускается в другое место, достаточно, чтобы поднимающее/опускающее транспортировочное устройство работало в соответствии с процедурой, противоположной рабочей процедуре описанной выше. Однако для того, чтобы перенос контейнера 1, подлежащего транспортировке в место опускания, был надежно выполнен, предельная высота опускания захватывающих контейнер средств 2А и 2В и позиционирующих элементов 3а-4b не устанавливается на высоте, при которой нижняя поверхность контейнера 1, подлежащего транспортировке, подвешенного захватывающими контейнер средствами 2А и 2В посредством действующих опорных пальцев 15 для контейнера, достигает поверхности пола или на высоте, на которой выступающая часть 1b основания устанавливается в части отверстия на верхнем конце другого контейнера 1, который уже был складирован, но установлен на высоту, которая немного ниже такой высоты. В таком случае, когда контейнер 1, подлежащий транспортировке, подвешенный посредством действующих опорных пальцев 15 для контейнера, достигает поверхности пола или когда часть 1b выступающего основания устанавливается в часть отверстия на верхнем конце другого контейнера 1 так, чтобы быть удерживаемой, вес контейнера 1, подлежащего транспортировке, принимается поверхностью пола или другим контейнером ниже, и, следовательно, вес больше не действует на действующие опорные пальцы 15 для контейнера. Следовательно, единые элементы 11 и 12, имеющие действующие опорные пальцы 15 для контейнера приводятся в состояние, в котором они могут перемещаться вверх в пределах диапазона от предельной высоты опускания, при которой единые элементы 11 и 12 поддерживаются упорами 21а и 21b до высоты, к которой витые пружины 20 сжатия возвращаются, до высоты Н3 равновесия, благодаря приему направленного вверх смещающего усилия витых пружин 20 сжатия в опорных средствах 16 и 17.
[0028] Следовательно, после того, как вес контейнера 1, подлежащего транспортировке, принимается поверхностью пола или другим контейнером ниже, единые элементы 11 и 12 захватывающих контейнер средств 2А и 2В не опускаются, когда столбчатые опорные элементы 6а и 6b, поддерживающие захватывающие контейнер средства 2А и 2В, опускаются, напротив, при этом сохраняется высота, при которой действующие опорные пальцы 15 для контейнера принимают направленное вверх смещающее усилие витых пружин 20 сжатия в опорных средствах 16 и 17 так, чтобы упереться в нижнюю поверхность нависающего ребра 1а в контейнере 1, подлежащем транспортировке, только столбчатые опорные элементы 6а и 6b относительно опускаются по отношению к захватывающим контейнер средствам 2А и 2В до тех пор, пока витые пружины 20 сжатия не достигнут высоты Н3 равновесия. Когда опускание столбчатых опорных элементов 6а и 6b останавливается в процессе, в котором витые пружины 20 сжатия достигают высоты Н3 равновесия, действующие опорные пальцы 15 для контейнера находятся в состоянии, в котором они удерживаются примыкающими к нижней поверхности нависающего ребра 1а в контейнере 1, подлежащем транспортировке, прижимное усилие между ними в этот момент, в максимуме, эквивалентно усилию противодействия сжатию до тех пор, пока витые пружины 20 сжатия не достигнут высоты Н3 равновесия, т.е. мало. Кроме того, когда опускание столбчатых опорных элементов 6а и 6b останавливается после того, как витые пружины 20 сжатия достигают высоты Н3 равновесия, действующие опорные пальцы 15 для контейнера отделяются к низу от нижней поверхности нависающего ребра 1а в контейнере 1, подлежащем транспортировке и опорные пальцы 15 для контейнера, расположенные непосредственно над верхней поверхностью нависающего ребра 1а, опускаются так, чтобы примкнуть к верхней поверхности нависающего ребра 1а в контейнере 1, подлежащем транспортировке. В этом случае также усилие сжатия ниже, чем смещающее усилие витых пружин 20 сжатия, в равновесии с весом единых элементов 11 и 12, поскольку единые элементы 11 и 12 удерживаются смещенными вверх, усилие сжатия, действующее между верхней поверхностью нависающего ребра 1а в контейнере 1, подлежащем транспортировке, и опорными пальцами 15 для контейнера, которые примыкают к нему, ниже усилия, эквивалентного весу единых элементов 11 и 12.
[0029] Как описано выше, захватывающие контейнер средства 2А и 2В и позиционирующие элементы 3а-4b опускаются до предельной высоты опускания так, чтобы опустить контейнер 1, подлежащий транспортировке в предполагаемое место, затем захватывающие контейнер средства 2А и 2В перемещаются прочь друг от друга в «горизонтально-латеральном» направлении, позиционирующие элементы 3а-4b перемещаются горизонтально прочь от четырех углов контейнера 1, подлежащего транспортировке, так что захватывающее действие на контейнер 1, подлежащий транспортировке, отменяется и после этого захватывающие контейнер средства 2А и 2В и позиционирующие элементы 3а-4b поднимаются до первоначальной высоты ожидания, в результате чего завершается серия шагов по опусканию контейнера. Когда в процессе выполнения шагов по опусканию контейнера, как описано выше, захватывающие контейнер средства 2А и 2В перемещаются прочь друг от друга в «горизонтально-латеральном» направлении, и, таким образом, опорные пальцы 15 для контейнера соответствующих единых элементов 11 и 12 освобождаются в «горизонтально-латеральном» направлении из области, которая перекрывает, на виде сверху, нависающее ребро 1а в контейнере 1, подлежащем транспортировке, как описано выше, усилие сжатия между верхней поверхностью или нижней поверхностью нависающего ребра 1а и опорными пальцами 15 для контейнера, которые примыкают там, равны нулю или малы. Следовательно, сопротивление вытягиванию опорных пальцев 15 для контейнера, примыкающих к верхней поверхности или нижней поверхности нависающего ребра 1а, мало, и даже когда контейнер 1, подлежащий транспортировке, является одним контейнером, который пуст и который не уложен в стопку, исчезает возможность того, что контейнер 1, подлежащий транспортировке перетащится латерально при вытягивании опорных пальцев 15 для контейнера.
Промышленная применимость
[0030] Поднимающее/опускающее транспортировочное устройство для контейнера для транспортировки изделия, согласно настоящему изобретению, может быть использовано в качестве устройства, которое способно к тому, чтобы в хранилище, в котором контейнер для транспортировки изделия, который достаточно мал, чтобы быть поднятым обеими руками, помещается непосредственно на плоскую поверхность, зажимать обе стороны контейнера посредством захватывающих контейнер средств и тем самым суметь поднять и транспортировать контейнер.
Перечень ссылочных позиций:
[0031] 1 - контейнер;
1а - нависающее ребро (поверхность уступа, где нижняя поверхность обращена вниз);
2А, 2В - захватывающие контейнер средства;
3а-4b - позиционирующий элемент;
5А, 5В - латерально перемещающееся основание;
ба, 6b - столбчатый опорный элемент;
7а-8b - передвижное основание;
10а, 10b - поднимающий/опускающий приводной плоский ремень;
11 - нижний единый элемент;
11а-12b - обойма;
12 - верхний единый элемент;
13 - поднимающий/опускающий направляющий рельс;
14 - направляющий узел;
15 - опорный палец для контейнера;
15а - часть с заостренным концом для поддержки контейнера;
15b - упор;
15с - витая пружина сжатия;
16, 17 - опорные средства;
18 - пружинный несущий элемент;
19 - пластина для крепления пружин;
20 - витая пружина сжатия;
21а, 21b - упор, изготовленный из упругого материала;
CP - центральное положение поднимающего/опускающего транспортировочного устройства;
H1 - высота максимального удлинения витой пружины сжатия;
Н2 - высота во время максимального сжатия витой пружины сжатия;
Н3 - высота равновесия, при которой единый элемент поддерживается в состоянии отсутствия нагрузки;
X - расположенная горизонтально линия, изображаемая в вертикальном направлении;
Y - расположенная горизонтально линия, изображаемая в латеральном направлении.
В поднимающем/опускающем транспортировочном устройстве контейнера для транспортировки изделия, захватывающие контейнер средства 2А, 2В имеют конструкцию, в которой несколько опорных пальцев 15 для контейнера расположены так, что они могут свободно выступать и втягиваться, а пружина 20 для смещения захватывающих контейнер средств 2А, 2В вверх расположена между захватывающими контейнер средствами 2А, 2В и столбчатым опорным элементом 6а, 6b для поддерживания захватывающих контейнер средств 2А, 2В таким образом, что упомянутые захватывающие контейнер средства 2А, 2В могут свободно подниматься и опускаться. В результате направленного вверх смещающего усилия пружины 20, захватывающие контейнер средства 2А, 2В поддерживаются на высоте Н3 равновесия в равновесии с их весом и способны перемещаться вертикально с высоты Н3 равновесия, служащей центром упомянутого перемещения. Когда захватывающие контейнер средства 2А, 2В поднимают контейнер 1, захватывающие контейнер средства 2А, 2В принимают вес контейнера 1, опускаются с высоты Н3 равновесия и поддерживаются на фиксированной высоте столбчатого опорного элемента 6а. Изобретение обеспечивает повышение надежности транспортирования. 3 з.п. ф-лы, 14 ил.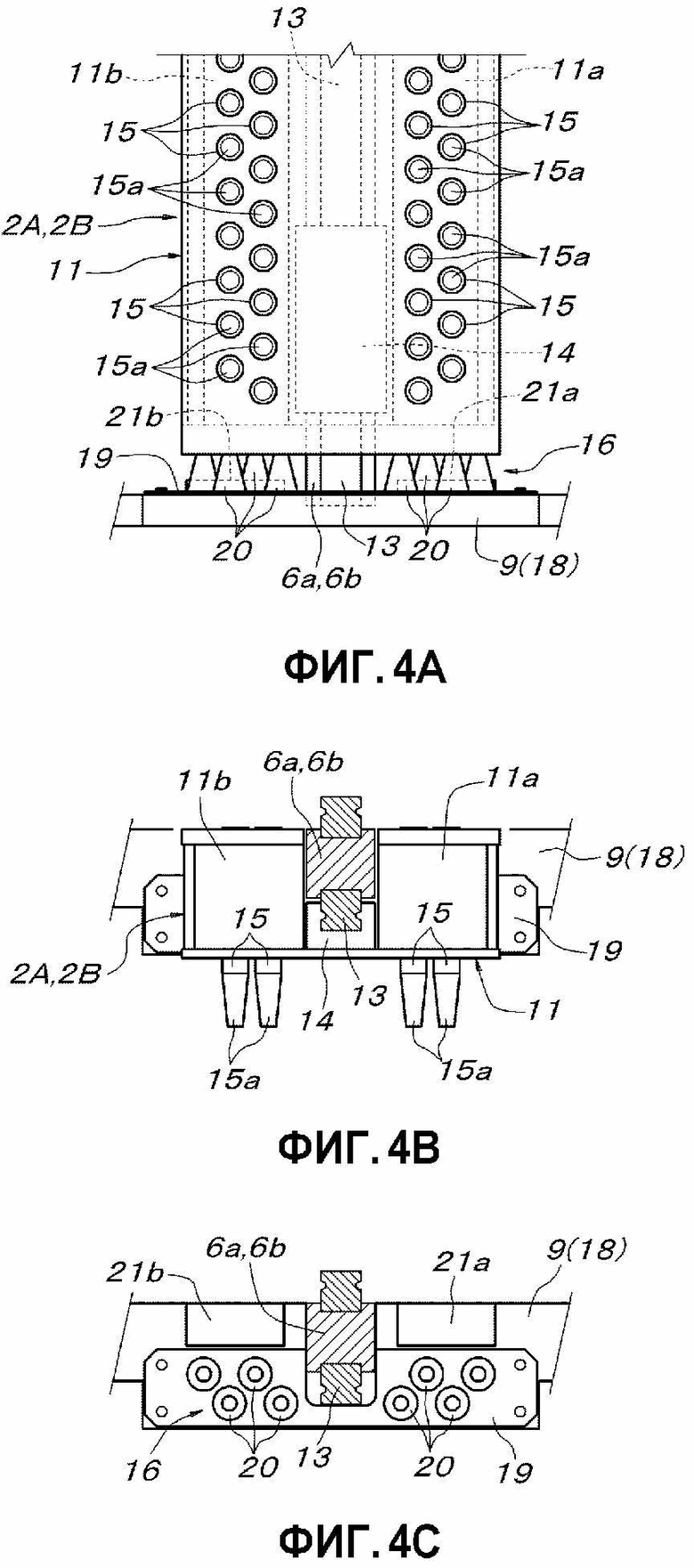
1. Поднимающее/опускающее транспортировочное устройство контейнера для транспортировки изделия, содержащее:
по меньшей мере два захватывающих контейнер устройства (2А, 2В), причем каждое захватывающее контейнер устройство выполнено с возможностью свободного перемещения ближе и дальше от контейнера для транспортировки изделия (1) в горизонтальном направлении и выполнено с возможностью свободного поднятия и опускания,
при этом каждое захватывающее контейнер устройство (2А, 2В) включает в себя конструкцию в форме держателя пальцев, имеющую множество опорных пальцев (15) для контейнера, причем каждый опорный палец для контейнера выполнен с возможностью свободного выступания и втягивания в горизонтальном направлении со стороны контейнера (1) и смещения и удерживания в положении выступания,
при этом опорные пальцы (15) для контейнера выполнены с возможностью введения с нижней стороны поверхности нависающего ребра (1а), образованной снаружи контейнера (1), путем перемещения к контейнеру, и опорные пальцы для контейнера выполнены с возможностью поддерживания контейнера, при этом
каждое захватывающее контейнер устройство (2А, 2В) поддерживается столбчатыми опорными элементами (6а, 6b) для подъема и опускания захватывающего контейнер устройства (2А, 2В),
упругий материал расположен между каждым столбчатым опорным элементом (6а, 6b) и соответствующим захватывающим контейнер устройством (2А, 2В), и упругий материал выполнен с возможностью смещения захватывающего контейнер устройства (2А, 2В) в направлении подъема,
причем каждое захватывающее контейнер устройство (2А, 2В) поддерживается смещающим вверх усилием упругого материала на высоте (Н3) равновесия в равновесии с весом захватывающего контейнер устройства (2А, 2В) так, чтобы быть способным перемещаться вертикально с высоты (Н3) равновесия, служащей центром перемещения, и
когда захватывающие контейнер устройства (2А, 2В) поднимают контейнер (1), захватывающие контейнер устройства (2А, 2В), которые принимают вес контейнера (1), опускаются с высоты (Н3) равновесия и поддерживаются на фиксированной высоте столбчатых опорных элементов (6а, 6b).
2. Поднимающее/опускающее транспортировочное устройство контейнера для транспортировки изделия по п. 1, в котором
в столбчатых опорных элементах (6а, 6b) в положении ниже захватывающих контейнер устройств (2А, 2В) предусмотрены пружинные несущие элементы (18), а
упругий материал содержит множество витых пружин (20) сжатия для поддерживания захватывающих контейнер устройств (2А, 2В) на верхних концах витых пружин сжатия, и витые пружины сжатия прикреплены к пружинным несущим элементам.
3. Поднимающее/опускающее транспортировочное устройство контейнера для транспортировки изделия по п. 2, в котором
предусмотрены упоры (21а, 21b), которые принимают захватывающие контейнер устройства (2А, 2В), которые опускаются с высоты (Н3) равновесия, и упоры выполнены с возможностью приема захватывающих контейнер устройств в положение выше, чем высота верхних концов витых пружин сжатия в состоянии максимального сжатия витых пружин сжатия.
4. Поднимающее/опускающее транспортировочное устройство контейнера для транспортировки изделия по п. 2, в котором
витые пружины (20) сжатия выполнены в форме конуса, в котором верхний конец для поддержки захватывающих контейнер устройств (2А, 2В) имеет минимальный диаметр.
| JP 2014177337 A, 25.09.2014 | |||
| JP 2007261738 A, 11.10.2007 | |||
| Движитель для колесных повозок | 1933 |
|
SU49885A1 |
| JP S63124545 A, 28.05.1988 | |||
| JP S592017789 A, 15.11.1984 | |||
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПЕРЕМЕЩЕНИЯ КОНТЕЙНЕРОВ | 2003 |
|
RU2291833C2 |
| ВСЕСОЮЗНАЯ ] ЗАХВАТНЫЙ ОРГАН ТОРЦОВОГО ГРУЗОЗАХВАТ||ШЭ^^Ш^Ш«;:''^'^?ий?УСТРОЙСТВА | 0 |
|
SU332018A1 |
| 0 |
|
SU172336A1 | |

