Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматике, телемеханике и связи и может быть использовано для регулирования скорости поездов.
Уровень техники
Известен способ регулирования скорости поездов, который основан на использовании автоблокировки, дополненной устройствами автоматической локомотивной сигнализации [Устройства автоматики телемеханики и связи. Часть I. Шалягин Д.В., Цыбуля Н.А., Косенко С.С., Волков А.А. и др. - М.: Маршрут, 2006 (стр. 314-322)]. Машинист получает информацию от напольных и локомотивного светофоров, по сигналам которых осуществляет регулирование скорости движения поезда.
Недостатком известного способа является то, что машинист должен самостоятельно, на основании своего опыта, с использованием информации плане и профиле пути, параметров поезда, а так же графика движения регулировать скорость поезда.
Наиболее близким техническим решением к заявленному способу является способа регулирования скорости поезда с участием унифицированной автоматической локомотивной сигнализации АЛСУ [Устройства автоматики телемеханики и связи. Часть I. Шалягин Д.В., Цыбуля Н.А., Косенко С.С., Волков А.А. и др. - М.: Маршрут, 2006 (стр. 322-331)]. В системе АЛСУ информация о скорости движения поезда передается огнями локомотивного светофора ЛС с индикацией контролируемой скорости ИКС в цифровом отображении. Показания светофоров зависят от количества свободных путевых участков, от конфигурации маршрута и марок крестовин маршрутных стрелок. Применяют также дополнительное устройство сигнализации и индикации: индикатор превышения контролируемой скорости ИПКС, индикатор контроля бдительности машиниста ИКБМ, индикатор фактической скорости движения ИФС, звуковую сигнализацию свистком электропневматического клапана ЭПК. При приеме поезда на станцию на локомотив передается информация об установленном маршруте приема на главный или боковой путь. При установке маршрута на боковой путь машинист информируется о допустимой скорости входа поезда на станцию, в зависимости от марки крестовины стрелки (1/11, 1/18, 1/22) и показаниях впередистоящего выходного светофора. Аналогичная информация передается на локомотив при отправлении поезда. При зеленом огне на ЛС превышение контролируемой скорости можно контролировать автоматически, а при необходимости - только машинистом. С учетом вышеперечисленных параметров машинист регулирует скорость движения поезда.
Недостатком устройства является то, что на локомотив не передается информация о времени приема и отправления поезда, нет информации о скорости с учетом плана и профиля пути, веса и длины поезда. Перечисленные проблемы должны решаться с участием машиниста. Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Комплексная система регулирования движения поездов с использованием информации хранящейся в локомотивной ЭВМ о планах и профилях путей, путевом развитии станций, марках крестовин стрелок, границах станционных и перегонных рельсовых цепей всего участка следования локомотива в составе поезда; информации, передаваемой на локомотив по радиоканалу со станции приема, о конфигурации установленного маршрута и информации со станций, прилегающих к перегону, о количестве свободных впереди лежащих рельсовых цепей на локомотив. Локомотивная ЭВМ, с учетом упомянутой информации, рассчитывает допустимую скорость движения поезда для каждой точки пути (кривую скорости) между поездом и препятствием Vд=ϕ(х), а также, с учетом передаваемой на локомотив информации с поста диспетчерской централизации о времени подхода или пересечения границ станций и приемоотправочных путей, эта ЭВМ определяет оптимальную скорость движения поезда Vo=ϕ(x) до ближайшей станции. ЭВМ диспетчерского круга с учетом параметров пути и графика движения поездов, хранящихся в памяти, параметров поездов, передаваемых на пост диспетчерской централизации со станций формирования поездов, координат местонахождения локомотивов поездов, полученных с участием ГЛОНАСС, планирует прогнозные графики движения опаздывающих поездов, на основании которого определяет время подхода или пересечения поездом границ станций (в предыдущих системах это места установки входных светофоров) и приемоотправочных путей (в предыдущих системах это места установки выходных светофоров), управляет по каналам диспетчерской централизации стрелочными переводами, а с участием радиоканалов позволяет регулировать скорость движения поездов, отличающаяся тем, что на пульте табло поездного диспетчера в трафаретах поездов, кроме номера поезда, представлена информация о времени пересечения границ станций и приемоотправочных путей, которое определяется ЭВМ диспетчерских кругов с учетом отставания поезда от графика, а также с учетом прогнозных графиков движения поездов попутного направления на перегоне. Сами трафареты окрашиваются разными цветами в зависимости от времени опоздания поезда, а именно: зеленым цветом - поезда идущие по расписанию, желтым - при отставании на 10-30 мин, красным - при большем времени отставания. Установленные маршруты обозначаются пунктирными стрелками. На локомотивном пульте-табло представлены обозначение поезда с их номерами и временем подхода или пересечения границы станции или приемоотправочного пути, препятствия (поезд или граница). Если до препятствия менее 6 км, кривые допустимой и оптимальной скоростей, значение скорости проследования стрелочных переводов, установленные маршруты обозначаются пунктирными стрелками.
Краткое описание чертежей
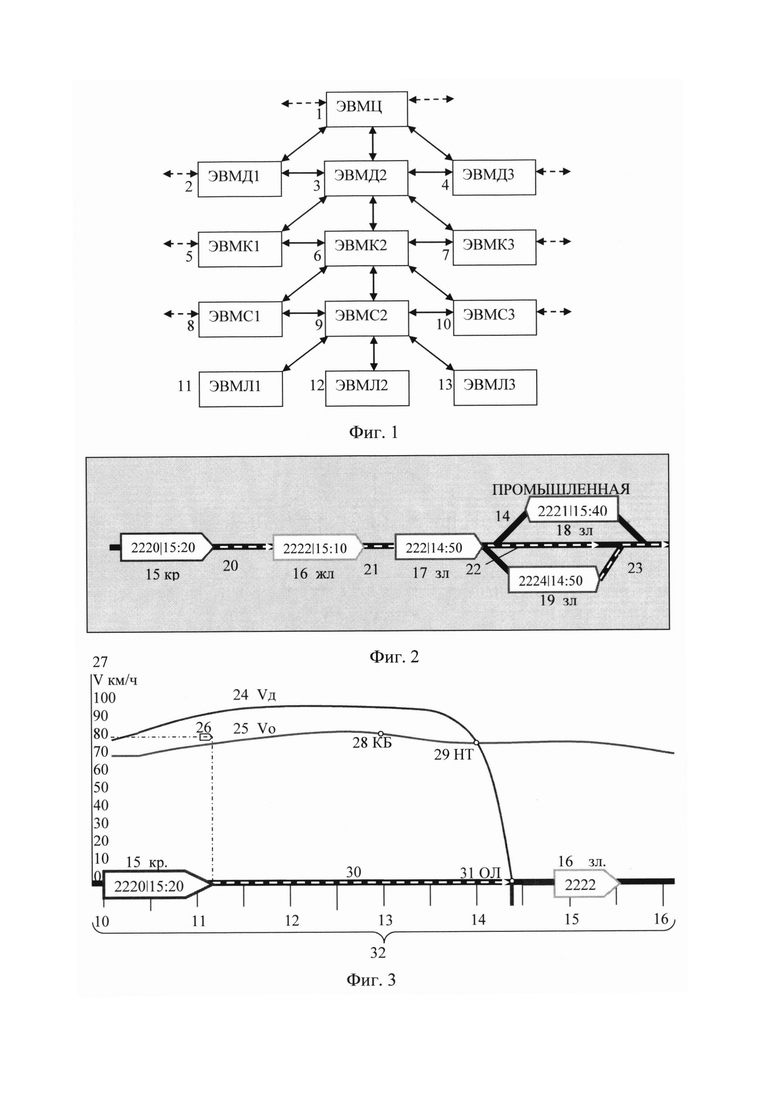
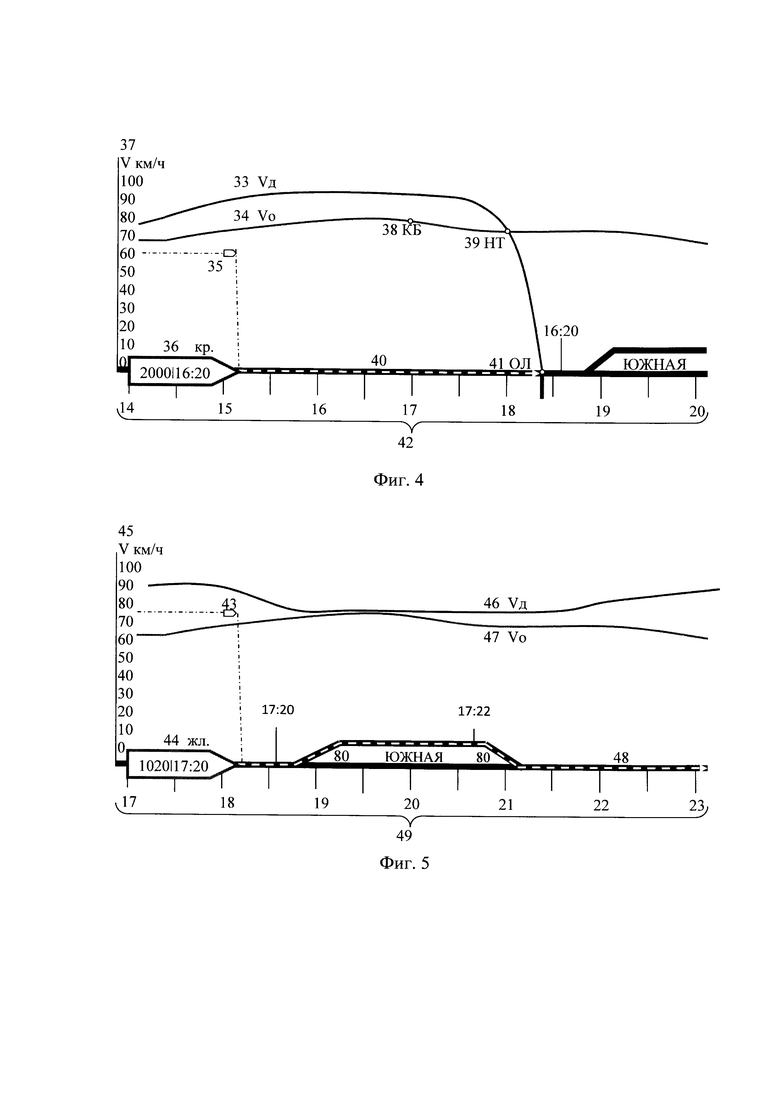
На Фиг. 1 представлена структурная схема соединения ЭВМ, на Фиг. 2 - фрагмент пульта-табло поездного диспетчера, на Фиг. 3 - фрагмент пульта-табло локомотива поезда 2220, на Фиг. 4 - фрагмент пульта-табло локомотива поезда 2000, на Фиг. 5 -фрагмент пульта-табло локомотива поезда 1020.
На Фиг. 1-5 представлены следующие обозначения:
1 - центральная электронно-вычислительная машина ЭВМЦ;
2, 3 и 4 - дорожные электронно-вычислительные машины ЭВМД;
5, 6 и 7 - электронно-вычислительные машины диспетчерских кругов ЭВМК;
8, 9 и 10 - станционные электронно-вычислительные машины ЭВМС;
11, 12 и 13 - локомотивные электронно-вычислительные машины ЭВМЛ;
14 - путевой план;
15, 16, 17, 18 и 19 поезда соответственно 2220, 2222, 222, 2221 и 2224;
20, 21, 22 и 23 маршруты следования поездов соответственно 2220, 2222, 222
и 2224;
24 - кривая допустимой скорости поезда 2220;
25 - кривая оптимальной скорости поезда 2220;
26 - указатель (значек) фактической скорости поезда 2220;
27 - шкала скорости на пульте-табло локомотива 2220;
28 - координата контроля бдительности на пульте-табло локомотива 2220;
29 - координата начала торможения на пульте-табло локомотива 2220;
30 - свободный участок пути перед поездом 2220 (маршрут следования);
31 - координата места остановки локомотива поезда 2220;
32 - километровые метки на пульте-табло локомотива 2220;
33 - кривая допустимой скорости поезда 2000;
34 - кривая оптимальной скорости поезда 2000;
35 - указатель фактической скорости поезда 2000;
36 - поезд 2000;
37 - шкала скорости на пульте-табло локомотива 2000;
38 - координата контроля бдительности на пульте-табло локомотива 2000;
39 - координата начала торможения на пульте-табло локомотива 2000;
40 - свободный участок пути перед поездом 2000 (маршрут следования);
41 - координата места остановки локомотива поезда 2000;
42 - километровые метки на пульте-табло локомотива 2000;
43 - указатель фактической скорости поезда 1020;
44-поезд 1020;
45 - шкала скорости на пульте-табло локомотива 1020;
46 - кривая допустимой скорости поезда 1020;
47 - кривая оптимальной скорости поезда 1020;
48 - свободный участок пути перед поездом 1020 (маршрут следования);
49 - километровые метки на пульте-табло локомотива 1020;
Осуществление изобретения
Регулирование движения поездов осуществляется с участием ЭВМ, структурная схема соединения которых представлена на Фиг. 1. Центральная ЭВМЦ 1 обменивается информацией с дорожными ЭВМ - ЭВМД1 2, ЭВМД2 3, ЭВМД3 4, … , которые обмениваются информацией с ЭВМ своих диспетчерских кругов - ЭВМК1 5, ЭВМК2 6, ЭВМК3 7, … , которые обмениваются информацией с ЭВМ своих станций ЭВМС1 8, ЭВМС2 9, ЭВМС3 10, … , которые обмениваются информацией с ЭВМ локомотивов ЭВМЛ1 11, ЭВМЛ2 12, ЭВМЛ3 13, … , которые находятся на станциях и прилегающих перегонах. Одноуровневые ЭВМ - дорожные ЭВМ, ЭВМ диспетчерских кругов, станционные ЭВМ также обмениваются информацией между собой. Такая иерархическая структура позволяет ЭВМ диспетчерских кругов ЭВМК1, ЭВМК2, ЭВМК3, … рассчитать оптимальную скорость Vo для поездов своего диспетчерского круга с учетом фактической поездной ситуации, информация о которой поступает с дорожных ЭВМД1 2, ЭВМД2 3, ЭВМД3 4, …, центральной ЭВМЦ 1, информации о параметрах поезда, которая поступает со станций формирования со станционных ЭВМС1 8, ЭВМС2 9, ЭВМС3 10, …, информации о параметрах пути (план и профиль пути, путевое развитие станций), которая хранится в памяти ЭВМ диспетчерских кругов ЭВМК1, ЭВМК2, ЭВМК4, … , и передать ее через станционные ЭВМС1 8, ЭВМС2 9, ЭВМС3 10, … , на локомотивные ЭВМЛ1 11, ЭВМЛ2 12, ЭВМЛ3 13, …
На Фиг. 2 представлен фрагмент пульта-табло поездного диспетчера, где отражена ситуация с поездами 15, 16, 17, 18 и 19 с установленными маршрутами (пунктирные стрелки) 20, 21, 22, 23 (маршруты у поездов 17 и 19, свободные участки пути перед поездами 15 и 16). На поездах указаны их номера (2220,2222, 222,2224 и 2221) и окраской (кр - красный, жл - желтый, зл - зеленый) - степень их отставания от графика. Поезд 15 (контур изображения окрашен красным цветом) идет вне графика (с большим отставанием), поезд 16 (контур изображения окрашен желтым цветом) идет по скорректированному графику (с умеренным отставанием), поезда 17, 18 и 19 (контуры изображения окрашены зеленым цветом) идут по плановому графику.
Локомотивные ЭВМЛ1 11, ЭВМЛ2 12, ЭВМЛ3 13, … рассчитывают допустимую скорость следования Vд для своих поездов с учетом информации о плане, профиле и путевом развитии участка пути перед поездом (с учетом марок крестовин стрелочных переводов), которая хранится в памяти ЭВМ, информации о количестве свободных впереди лежащих путевых участков, которая передается по радиоканалу с одной из ближайших станций. В пути следования непрерывно контролируется фактическая скорость движения поезда Vф, которая не должна превышать допустимую скорость Vд. Этот контроль осуществляет локомотивная ЭВМЛ.
На Фиг. 3 представлен фрагмент локомотивного пульта-табло изображения поезда 15 следующему по перегону с номером 2220 и поездом 16 (перед поездом 15 находится поезд 16), кривые допустимой 24 и оптимальной 25 скорости, а также фактическая скорость следования поезда 15, которая отображается значком 26. На условном изображении поезда 15 кроме номера поезда 2220 указано время подхода/пересечения границы впереди лежащей станции 15:20. Если поезд следует по станции, то на условном изображении поезда кроме номера поезда указано время подхода/пересечения границы приемоотправочного пути. Также на фиг. 3 отображены точка места контроля бдительности машиниста КБ 28, точка места начала торможения НТ 29, шкала скоростей 27 и размещение километровых меток 32.
На Фиг. 4 представлен фрагмент локомотивного пульта-табло изображения поезда 36 с номером 2000 следующего перед станцией, кривые допустимой 33 и оптимальной 34 скорости, а также фактическая скорость следования поезда 36, которая отображается значком 35. На условном изображении поезда 36 кроме номера поезда 2000 указано время подхода/пересечения границы впереди лежащей станции 16:20. Также на фиг. 4 отображены точка места контроля бдительности машиниста КБ 38, точка места начала торможения НТ 39, шкала скоростей 37 и размещение километровых меток 42.
На Фиг. 5 представлен фрагмент локомотивного пульта-табло изображения поезда 44 с номером 1020, проходящего станцию без остановки, кривые допустимой 46 и оптимальной 47 скорости, а также фактическая скорость следования поезда 44, которая отображается значком 43. На условном изображении поезда 44 кроме номера поезда 1020 указано время подхода/пересечения границы впереди лежащей станции 17:20, а также время входа на станцию 17:20 (дублирующий указатель) и время выхода со станции 17:22. Также на фиг. 5 отображен безостановочный маршрут 48 и размещение километровых меток 49.
ЭВМ диспетчерских кругов (ЭВМК) формируют приказы установки маршрутов на станциях и приказы, передаваемые на локомотивы с участием станционных ЭВМС. Связи между ЭВМ осуществляются по линейным цепям, кроме связи между станционными ЭВМ (ЭВМС) и локомотивными ЭВМ (ЭВМЛ), которые осуществляются по радиоканалу. Для контроля за движением поездов информация о координате их местонахождения с локомотива передается на ЭВМ диспетчерского круга ЭВМК.
При перемещении поездов между смежными диспетчерскими кругами информация о них передается между ЭВМК.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ПОЕЗДОВ | 2019 |
|
RU2732670C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714824C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714966C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ЖЕЛЕЗНОДОРОЖНОМ ТРАНСПОРТЕ | 2019 |
|
RU2723528C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ ДИСПЕТЧЕРСКОГО КРУГА | 2018 |
|
RU2683978C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПОМОЩЬЮ РАДИОСИГНАЛОВ | 2019 |
|
RU2714962C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2018 |
|
RU2694679C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА СТАНЦИЯХ | 2020 |
|
RU2746819C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НА ЛОКОМОТИВЕ ДЛЯ КОНТРОЛЯ ЗА ДВИЖЕНИЕМ ПОЕЗДА | 2019 |
|
RU2723513C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ БЕЗ НАПОЛЬНЫХ УСТРОЙСТВ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ | 2019 |
|
RU2712364C1 |
Изобретение относится к области железнодорожной автоматики для регулирования движения поездов. Система использует информацию, хранящуюся в локомотивной ЭВМ, о планах и профилях путей, путевом развитии станций, марках крестовин стрелок, границах станционных и перегонных рельсовых цепей всего участка следования локомотива в составе поезда; информацию, передаваемую на локомотив по радиоканалу со станции приема, о конфигурации установленного маршрута и информацию со станций, прилегающих к перегону, о количестве свободных впереди лежащих рельсовых цепей на локомотив, включает локомотивную ЭВМ, выполненную с возможностью расчета допустимой скорости Vд движения поезда для каждой точки пути, т.е. кривой скорости, между поездом и препятствием, а также с учетом передаваемой на локомотив информации с поста диспетчерской централизации о времени подхода или пересечения границ станций и приемоотправочных путей, ЭВМ также выполнена с возможностью определения оптимальной скорости движения поезда Vo до ближайшей станции. ЭВМ диспетчерского круга с учетом параметров пути и графика движения поездов, хранящихся в памяти, параметров поездов, передаваемых на пост диспетчерской централизации со станций формирования поездов, координат местонахождения локомотивов поездов, полученных с участием ГЛОНАСС, планирует прогнозные графики движения опаздывающих поездов, на основании которых определяет время подхода или пересечения поездом границ станций и приемоотправочных путей, управляет по каналам диспетчерской централизации стрелочными переводами и регулирует скорости движения поездов посредством радиоканалов. Система выполнена с возможностью отображения на локомотивном пульте-табло обозначений поезда с их номерами и временем подхода или пересечения границы станции или приемоотправочного пути, препятствия: поезд или граница, если до препятствия менее 6 км, кривые допустимой и оптимальной скоростей, значение скорости проследования стрелочных переводов. Достигается повышение безопасности движения. 3 ил.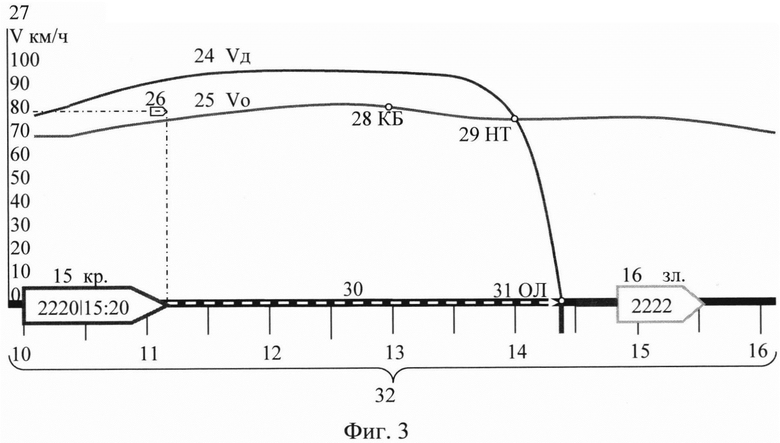
Комплексная система регулирования движения поездов с использованием информации, хранящейся в локомотивной ЭВМ, о планах и профилях путей, путевом развитии станций, марках крестовин стрелок, границах станционных и перегонных рельсовых цепей всего участка следования локомотива в составе поезда; информации, передаваемой на локомотив по радиоканалу со станции приема, о конфигурации установленного маршрута и информации со станций, прилегающих к перегону, о количестве свободных впереди лежащих рельсовых цепей на локомотив, включающая локомотивную ЭВМ, выполненную с возможностью расчета допустимой скорости Vд движения поезда для каждой точки пути, т.е. кривой скорости, между поездом и препятствием, а также с учетом передаваемой на локомотив информации с поста диспетчерской централизации о времени подхода или пересечения границ станций и приемоотправочных путей, ЭВМ также выполнена с возможностью определения оптимальной скорости движения поезда Vo до ближайшей станции, ЭВМ диспетчерского круга с учетом параметров пути и графика движения поездов, хранящихся в памяти, параметров поездов, передаваемых на пост диспетчерской централизации со станций формирования поездов, координат местонахождения локомотивов поездов, полученных с участием ГЛОНАСС, выполнена с возможностью планирования прогнозных графиков движения опаздывающих поездов, на основании которого определяет время подхода или пересечения поездом границ станций и приемоотправочных путей, управления по каналам диспетчерской централизации стрелочными переводами, а с участием радиоканалов позволяет регулировать скорость движения поездов, отличающаяся тем, что на пульте табло поездного диспетчера в трафаретах поездов кроме номера поезда представлена информация о времени пересечения границ станций и приемоотправочных путей, которое определяется ЭВМ диспетчерских кругов с учетом отставания поезда от графика, а также с учетом прогнозных графиков движения поездов попутного направления на перегоне, сами трафареты окрашиваются разными цветами в зависимости от времени опоздания поезда, а именно: зеленым цветом – поезда, идущие по расписанию, желтым - при отставании на 10-30 мин, красным - при большем времени отставания, установленные маршруты обозначаются пунктирными стрелками, на локомотивном пульте-табло представлены обозначение поезда с их номерами и временем подхода или пересечения границы станции или приемоотправочного пути, препятствия: поезд или граница, если до препятствия менее 6 км, кривые допустимой и оптимальной скоростей, значение скорости проследования стрелочных переводов, установленные маршруты обозначаются пунктирными стрелками.
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
| СПОСОБ ПОВЫШЕНИЯ УРОВНЯ БЕЗОПАСНОСТИ В ПУТИ СЛЕДОВАНИЯ ПОДВИЖНОГО СОСТАВА НА ОСНОВЕ ПРОГНОЗНОГО РАСЧЕТА СКОРОСТИ ДВИЖЕНИЯ И СПОСОБ ОПРЕДЕЛЕНИЯ РЕЖИМА ТОРМОЖЕНИЯ ПОДВИЖНОГО СОСТАВА НА ОСНОВЕ ОЦЕНКИ ЭФФЕКТИВНОСТИ ДЕЙСТВИЯ ТОРМОЗОВ И ДЛИНЫ ТОРМОЗНОГО ПУТИ | 2010 |
|
RU2469895C2 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| Оптическая игрушка | 1954 |
|
SU102345A1 |
| Шалягин Д.В., Цыбуля Н.А., Косенко С.С., Волков А.А | |||
| и др | |||
| Устройства автоматики телемеханики и связи | |||
| М.: Маршрут, 2006, стр | |||
| Ледорезный аппарат | 1921 |
|
SU322A1 |

