Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и может быть использовано для регулирования движения поездов на перегоне.
Уровень техники
Известен способ контроля проследования поезда в полном составе (способ контроля освобождения участка) заключающийся в том, что при проследовании хвостового вагона с вагонным индуктором над контрольной точкой фиксируется освобождение участка [Котляренко Н.Ф. и др. Путевая блокировка и авторегулировка. - М.: Транспорт, 1983 (стр. 241-242, рис. 11.6)].
Недостатками данного способа являются: необходимость использования достаточно сложного вагонного индуктора (преобразователя частоты); отсутствие возможности контроля занятия участка; отсутствие контроля целостности рельсовых нитей; сложность применения данного способа на участках с интенсивным движением.
Известен способ контроля состояний путевого участка, заключающийся в том, что занятие путевого участка осуществляют рельсовой цепью длиной 20 м на частоте 4555 Гц, исправность рельсовых нитей - рельсовой цепью длиной 500 м на частоте 780 Гц, передача информации на локомотив - рельсовой цепью длиной 500 м на частоте 375 Гц, освобождение путевого участка - за счет взаимодействия вагонного и путевого индукторов [Патент РФ №2649107 Способ контроля состояний путевого участка авторов Полевой Ю.И., А.В Горелик А.В., опубл, 29.03.2018. Бюл.№10].
Недостатками этого способа является то, что используются большое количество путевых приборов для рельсовой цепи, а также небольшая длина блок-участков.
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом является повышение безопасности движения поездов, надежности работы автоблокировки (АБ), снижение затрат на строительство, расширение значности системы автоматической локомотивной сигнализации, которое осуществлено с помощью радиоканалов.
Технический результат достигается за счет способа контроля состояний путевого участка, который заключается в том, что контроль освобождения блок-участка осуществляют за счет взаимодействия путевого и вагонного индукторов, а занятие - за счет короткой тональной рельсовой цепи, при этом полученную информацию передают на пост ЭЦ для формирования сигналов АЛС, при этом контроль исправности рельсовых нитей осуществляют бегунками контроля целостности рельсовых нитей, которые отслеживают неровности рельсовых нитей, возникшие при изломе рельс, при этом при фиксации повреждения рельс используют микропроцессорное устройство, установленное в антивандальном корпусе на хвостовом вагоне, причем посредством штока отводят вагонный индуктор от путевого, взаимодействия индукторов не происходит и сигнал контроля освобождения блок-участка не передается, при этом в этом случае по радиоканалу на локомотив передают сигнал остановки, причем отсутствие сигнала также расценивают в качестве сигнала остановки, а в обратном случае на локомотив по радиоканалу передают информацию о количестве свободных блок-участков и номер пути приема или отправления.
Краткое описание чертежей
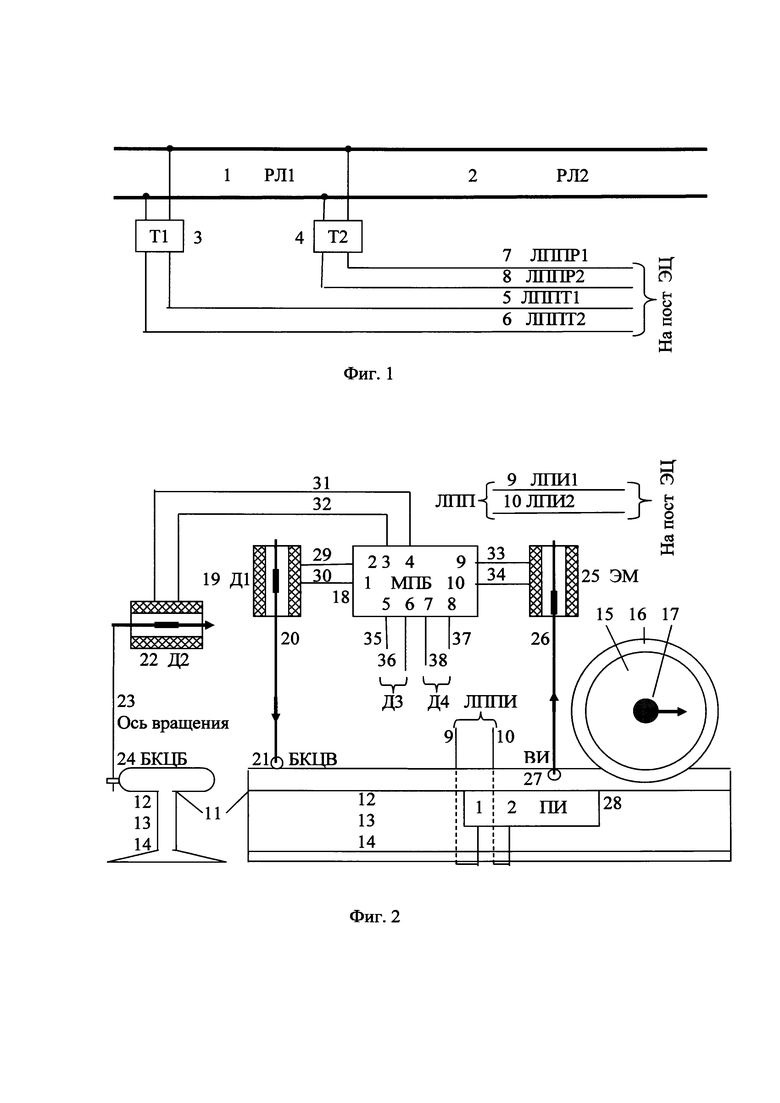
На Фиг. 1 представлено устройство контроля занятия путевого участка, на Фиг. 2 - устройство контроля освобождения путевого участка и устройство контроля целостности рельсовых нитей.
Осуществление изобретения
На Фиг. 1 приведены обозначения:
1 - первая рельсовая линия РЛ1;
2 - вторая рельсовая РЛ2 (рельсовой цепью не оборудована);
3 - первый трансформатор (питающего конца) Т1;
4 - второй трансформатор (приемного конца) Т2;
5 - первый линейный провод питающего конца ЛППТ1;
6 - второй линейный провод питающего конца ЛППТ2;
7 - первый линейный провод приемного конца) ЛППР1;
8 - второй линейный провод приемного конца ЛППР2.
На Фиг. 2 приведены обозначения:
9 - первый линейный провод от путевого индуктора ЛПИ1;
10 - второй линейный провод от путевого индуктора ЛПИ2;
11 - рельс (вид с торца и вид сбоку);
12 - головка рельса;
13 - шейка рельса;
14 - подошва рельса;
15 - плоскость колеса;
16 - реборда колеса;
17 - ось колеса;
18 - микропроцессорный блок для контроля целостности обоих рельсов за хвостом поезда;
19 - первый датчик Д1 контроля целостности верхней поверхности головки первого рельса;
20 - штоком с сердечником первого датчика;
21 - бегунок контроля верхней поверхности головки рельса первого;
22 - второй датчик Д2 контроля целостности боковой поверхности первого рельса;
23 - шток с сердечником второго датчика;
24 - бегунок контроля боковой поверхности головки первого рельса;
25 - электромагнит (ЭМ) управления перемещением локомотивного индуктора;
26 - сердечник со штоком электромагнита;
27 - вагонный индуктор;
28 - путевой индуктор;
29 и 30 - провода для связи первого датчика Д1 первого рельса с микропроцессорным блоком МПБ;
31 и 32 - провода для связи второго датчика Д2 первого рельса с микропроцессорным блоком МПБ;
33 и 34 провода для связи электромагнита с микропроцессорным блоком МПБ;
35 и 36 - провода для связи третьего (верхнего) датчика (на фиг. 2 не показан) второго рельса с микропроцессорным блоком МПБ;
37 и 38 - провода для связи четвертого (бокового) датчика второго рельса с микропроцессорным блоком МПБ.
Действие способа контроля состояний путевого участка основано на использовании тональной рельсовой цепи для контроля занятия путевого участка (Фиг. 1), вагонного датчика контроля целостности рельс путевого участка и вагонного датчика контроля проследования поезда в полном составе. Аппаратура устройства размещается на перегоне в трансформаторных ящиках, расположенных на границах блок-участков. Путевой индуктор ПИ (Фиг. 2) расположен у шейки правого по ходу движения рельса с внутренней стороны колен. При проходе хвоста поезда вагонный индуктор ВИ взаимодействует с путевым индуктором в том случае, если рельсовые нити исправны. Если одна или обе из рельсовых нитей повреждены, то вагонный индуктор ВИ перемещается вверх и взаимодействия индукторов не происходит. Путевой участок или занят или поврежден. В противном случае на пост ЭЦ передается сигнал о свободности и исправности блок-участка и станционная ЭВМ (на Фиг. 2 не показана) формирует приказ о свободности участка. Между локомотивом и постом ЭЦ устанавливается канал радиосвязи, по которому на локомотив передается информация о количестве свободных участков перед поездом и номер пути приема или отправления со станции (на Фиг. 2 не отражено). Микропроцессорный блок МПБ размещается на хвостовом вагоне с автономным источником питания. Блок МПК получает информацию о состоянии датчиков Д1 и Д2, которые посредством бегунков контроля целостности верхней поверхности головки рельса (БКЦВ) и бегунка контроля целостности боковой поверхности головки рельса (БКЦБ). Если рельсы исправны, то сердечники датчиков Д1 и Д2 находятся в исходном положении. При изломе рельса концы рельс у излома, даже при наличии гальванического контакта, смещены. Сердечники датчиков, имея малую инерционность, кратковременно смещаются и воздействуют на микропроцессорный блок МПБ, который осуществляет размыкание цепи электромагнита. При этом поднимается вагонный индуктор ВИ, исключая связь вагонного ВИ и путевого ПИ индукторов. Информация о свободности и исправности путевого участка на пост ЭЦ не поступает. В нормальном состоянии к осям датчиков Д, Д2 и электромагнита ЭМ приложены механические усилия (за счет пружин) в направлении стрелок на Фиг. 2. Вагонный индуктор расположен по следу реборды колеса и рельса не касается. Программа микропроцессорного блока учитывает виляние колес во время движения (особенно последнего вагона грузового поезда) и не воспринимает это виляние как повреждение рельса.
У второго рельса также размещены два контрольных бегунка и датчики (на Фиг. 2 бегунки и датчики не показаны), за счет которых отслеживается целостность второго рельса.
При движении поезда по путевому участку, на границах которого находятся рельсовые цепи содержащие рельсовые линии РЛ1 1, трансформаторы Т1 3 и Т2 4 соединенные с постом ЭЦ ближайшей станции проводами ЛПТР1 5, ЛПТР2 6, ЛППР1 7 и ЛППТР2 8 фиксируется его вступление на блок-участок, в который входят рельсовые линии РЛ1 1 и РЛ2 2. При электротяге рельсовая линия РЛ2 оборудуется стыковыми соединителями для пропуска тягового тока, а при автономной тяге соединители не устанавливаются. При электротяге переменного тока для уравнивания тягового тока устанавливаются дроссели Д20 через каждые 6 км. Освобождение блок-участка фиксируется за счет путевого индуктора 28, который посылает контрольный импульс тока на пост ЭЦ по проводам ЛПИ1 9 и ЛПИ2 10, что поезд освободил блок-участок и рельсовые нити исправны. Импульс инициируется при взаимодействии путевого индуктора ПИ 28 с вагонным индуктором ВИ 27. Если рельсовые нити не исправны, то вагонный индуктор ВИ 27 отводится (приподнимается) от путевого индуктора ПИ 28 и освобождения не фиксируется. В рабочем состоянии вагонный индуктор ВИ 27 перемещается по следу реборды колеса 16. На Фиг. 2 кроме реборды колеса показана плоскость колеса 15, ось колеса 17 и стрелка направления движения. Все приборы Фиг. 2, кроме путевого индуктора, размещены в антивандальном корпусе, который закреплен на хвостовом вазоне поезда.
За хвостом поезда по рельсу 11 по верхней и боковой плоскости головки рельса 12 катятся контрольные бегунки БКЦВ 21 и БКЦБ 24, которые отслеживают неровности головки рельса, которые могут появиться при изломе рельса. Ниже показаны шейка рельса 13 и подошва рельса 14, под которыми проложены линейные провода ЛПИ1 9 и ЛПИ2 10 для передачи информации на пост ЭЦ о состоянии блок-участка.
При изломе рельса на верхней или боковой поверхности головки рельса 12 образуется неровность (сдвиг концов рельс у излома). Бегунки БКЦВ 21 или БКЦБ 24 обнаруживают излом (даже если нет гальванического разрыва) и перемещается шток 20 первого датчика Д1 19 или перемещается шток 23 второго датчика Д2 23. У датчиков изменяются магнитные поля, а следовательно, и входные сопротивления катушек датчиков. Эта информация по проводам 29, 30 или 31, 32 передается на микропроцессорный блок МПБ 18, который по проводам 33 и 34 отключает электромагнит ЭМ 25 и сердечник со штоком 26 перемещается вверх по направлению стрелки за счет пружины, которая на Фиг. 2 не показана* (не показаны пружины и у датчиков, которые также тянут сердечники датчиков в направлении стрелок). Отводится вагонный индуктор ВИ 27 от путевого индуктора ПИ 28 по направлению стрелки. Взаимодействия между индукторами не происходит, сигнал (импульс) о свободности и исправности на пост ЭЦ не передается. При изломе другого рельса сигнал от датчиков ДЗ и Д4 (на Фиг. 2 не показаны) по проводам 35, 36 и 37, 38 поступает также на блок МПБ и вагонный индуктор ВИ 27 также отводится от путевого индуктора ПИ 28.
Достоинствами предложенного способа являются: блок-участки могут быть больший длины (до 50 км); контроль состояний путевых участков не зависит от сопротивления изоляции; при автономной тяге не требуется ни изолирующих стыков, ни рельсовых соединителей; при электротяге переменного тока для уравнивания тягового тока может быть использован малогабаритными дросселями Д20; при электротяге изолирующие стыки так же не нужны; информация на локомотивы передается с помощью радиоканалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2020 |
|
RU2729753C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2770034C1 |
| СПОСОБ ИСКЛЮЧЕНИЯ НЕГАТИВНОГО ВЛИЯНИЯ ПОТЕРИ ШУНТА | 2018 |
|
RU2684161C1 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ РЕЛЬСОВЫХ НИТЕЙ | 2020 |
|
RU2745512C1 |
| УСТРОЙСТВО РЕЗЕРВНОГО КОНТРОЛЯ СОСТОЯНИЙ ПУТЕВЫХ УЧАСТКОВ | 2020 |
|
RU2751830C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2017 |
|
RU2655106C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЙ ПУТЕВОГО УЧАСТКА НА СТАНЦИЯХ И ПЕРЕГОНАХ | 2019 |
|
RU2723502C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2020 |
|
RU2730699C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПОМОЩЬЮ РАДИОСИГНАЛОВ | 2019 |
|
RU2714962C1 |
Изобретение относится к области железнодорожной автоматики для контроля состояния путевых участков. В способе контроль освобождения блок-участка осуществляют за счет взаимодействия путевого и вагонного индукторов, а занятие - за счет короткой тональной рельсовой цепи, при этом полученную информацию передают на пост ЭЦ для формирования сигналов АЛС, отличающемся тем, что контроль исправности рельсовых нитей осуществляют бегунками контроля целостности рельсовых нитей, которые отслеживают неровности рельсовых нитей, возникшие при изломе рельс, при этом при фиксации повреждения рельс используют микропроцессорное устройство, установленное в антивандальном корпусе на хвостовом вагоне, причем посредством штока отводят вагонный индуктор от путевого, взаимодействия индукторов не происходит и сигнал контроля освобождения блок-участка не передается, при этом в этом случае по радиоканалу на локомотив передают сигнал остановки, причем отсутствие сигнала также расценивают в качестве сигнала остановки, а в обратном случае на локомотив по радиоканалу передают информацию о количестве свободных блок-участков и номер пути приема или отправления. Достигается повышение безопасности движения поездов. 2 ил.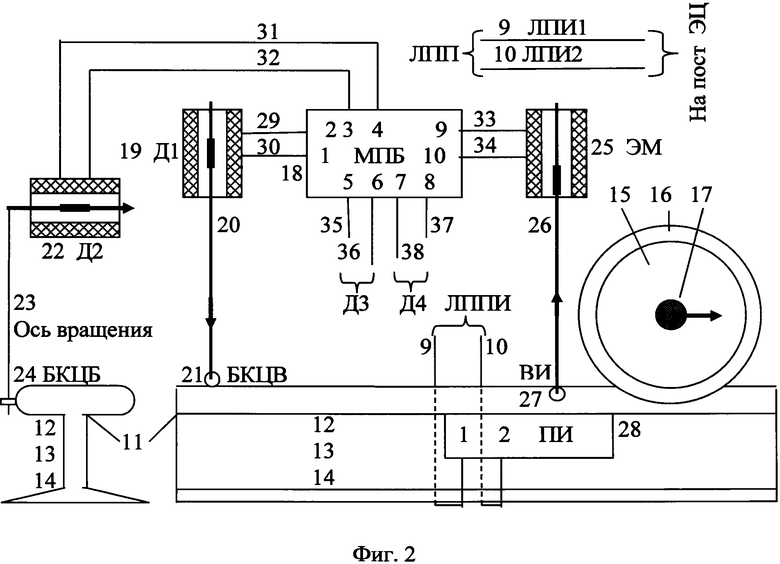
Способ контроля состояний путевого участка, заключающийся в том, что контроль освобождения блок-участка осуществляют за счет взаимодействия путевого и вагонного индукторов, а занятие - за счет короткой тональной рельсовой цепи, при этом полученную информацию передают на пост ЭЦ для формирования сигналов АЛС, отличающийся тем, что контроль исправности рельсовых нитей осуществляют бегунками контроля целостности рельсовых нитей, которые отслеживают неровности рельсовых нитей, возникшие при изломе рельс, при этом при фиксации повреждения рельс используют микропроцессорное устройство, установленное в антивандальном корпусе на хвостовом вагоне, причем посредством штока отводят вагонный индуктор от путевого, взаимодействия индукторов не происходит и сигнал контроля освобождения блок-участка не передается, при этом в этом случае по радиоканалу на локомотив передают сигнал остановки, причем отсутствие сигнала также расценивают в качестве сигнала остановки, а в обратном случае на локомотив по радиоканалу передают информацию о количестве свободных блок-участков и номер пути приема или отправления.
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЙ РЕЛЬСОВОЙ ЛИНИИ С ПЕРЕМЫЧКАМИ ПО КОНЦАМ | 2017 |
|
RU2671591C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ЗАЩИТЫ И ОСТАНОВКИ ПОЕЗДА ДЛЯ УПРАВЛЕНИЯ ПОЕЗДОМ С ИСПОЛЬЗОВАНИЕМ ПЕРЕДАЧИ ДАННЫХ | 2004 |
|
RU2346840C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2017 |
|
RU2655106C1 |
| СИСТЕМА ETCS L2 - EUROPEAN TRAIN CONTROL SYSTEM LEVEL 2 - АВТОМАТИЧЕСКАЯ ЛОКОМОТИВНАЯ СИГНАЛИЗАЦИЯ С АВТОСТОПОМ | 2012 |
|
RU2584040C2 |
| Котляренко Н.Ф., Соболев Ю.В., Шишляков А.В | |||
| "Путевая блокировка и авторегулировка" - М.: Транспорт, 1983, 408 с. | |||

