Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано для регулирования движения поездов.
Уровень техники
Известен способ регулирования движения поездов с использованием устройств радиосвязи, с помощью которых передают с поста электрической централизации ЭЦ на локомотив Л информацию о состоянии перегонных рельсовых цепей РЦ, расположенных в зоне контроля ЗК, т.е. между станцией и серединой перегона, номерах установленных маршрутов УМ и прогнозное время приема/отправления поезда, локомотивной ЭВМ ЭВМЛ, которая на основании полученной информации и информации, хранящейся в память о путевом развитии, плане и профиле пути всего участка следования Л, а также с учетом местонахождения Л, которое определяют с помощью приемника ГЛОНАСС ПГЛ, рассчитывают протяженность свободного участка пути перед поездом, определяет конфигурацию маршрута, оптимальную скорость движения поезда в любой точке пути и передает информацию о скорости на устройство регулирования скорости движения поезда, которое управляет локомотивным контроллером и краном машиниста, поддерживает оптимальную скорость движения поезда в зоне контроля ЗК, контроль состояний перегонных рельсовых линий РЛ осуществляют тональными рельсовыми цепями ТРЦ с помощью двухпроводной линии для питания ЛП и пошаговой работы линейных распределителей ЛРС, и двухпроводной линии контроля ЛК для передачи информации о состоянии РЦ на посты ЭЦ прилегающих к перегону станций; линии ЛП и ЛК укладывают от середины перегона до станции, к ЛП на посту ЭЦ подсоединяют тональный путевой генератор ПГ, а к ЛК - тональный путевой приемник ПП; под воздействием станционной ЭВМ ЭВМС ПГ посылает в ЛП серии импульсов, между которыми следуют интервалы, выполняющие функции сигнала цикловой синхронизации ЦС, импульсы разделены границами, где фаза сигнала изменяется на противоположную; на границах РЦ устанавливают путевые коробки ПК с аппаратурой питающего конца ПКг (генераторный) или приемного конца ПКп, ПКп и ПКг размещают в шахматном порядке; выходы линейных распределителей ЛРС, размещенных в ПК, подсоединяют к электронным ключам ЭК так, чтобы осуществлять циклический контроль состояний РЦ; по ЛК циклически передают информацию на ПП о состоянии РЦ, при этом к ПП посредством путевых трансформаторов ПТ и ЛК подсоединяют приемные концы РЦ, амплитуда сигнала указывает на состояние РЛ; на Л с постов ЭЦ передают информацию о состоянии РЦ находящихся в зоне ЗК и дополнительно о РЦ на участке, длина которого соответствует интервалу попутного следования и который примыкает к середине перегона, что является зоной управления ЗУ, это позволяет уверенно регулировать скорость движения поезда, пересекающего середину перегона; передачу информации с поста ЭЦ на Л осуществляют с помощью приказа телеуправления ТУ с участием радиопередатчика поста ЭЦ РПЭ, прием информация на Л с поста ЭЦ - с помощью локомотивного радиоприемника РПЛ, на все Л, находящиеся в ЗУ, передают одинаковую информацию: о свободных РЦ на перегоне и установленных маршрутах на станции -маршруты приема и отправления, выбор полезной части информации на Л осуществляют с помощью ПГЛ; переключение РПЛ с приема радиосигнала с поста ЭЦ станции отправления на прием сигнала с поста ЭЦ станции приема осуществляют в середине перегона, которую фиксирует ПГЛ [Патент.2732181 (РФ). Способ регулирования движения поездов / Полевой Ю.И. - Опубл. 14.09.2020 Бюл. №26, МПК В61L 23/16.].
Недостатком способа является использование кабельных линий, для надежной работы которых, требуется прокладка резервной кабельной линии, желательно, с другой стороны ж.д. полотна относительно проложенной основной кабельной линии.
Известен способ регулирования движения поездов, основанный на контроле состояний путевых перегонных участков с участием локомотивных и станционной радиостанций, с локомотивов, находящихся в зоне связи, на посты ЭЦ передают информацию о координатах головы поезда, на локомотивы с поста ЭЦ передают информацию о состоянии впереди лежащих путевых участков, установленных маршрутах на впереди лежащих станциях, локомотивные ЭВМ с учетом принятой информации и информации, хранящейся в памяти о параметрах поезда и пути, путевого развития станций определяют оптимальную скорость движения поезда, а также рекомендуемые позиции локомотивного контроллера и крана машиниста, которые устанавливаются электромеханическим устройством, обмен информацией между локомотивами, хвостовыми тележками и постами ЭЦ станции отправления и станции приема осуществляют тогда, когда поезд находится на станции, а также на участках приближения или удаления, затем связь со станциями осуществляют через ретрансляторы, размещенные на переездах, локомотивах поездов, идущих по перегону, или стационарных ретрансляторах; инициализация подключения и отключения локомотивных радиостанций и радиостанций на прицепных тележках от станционных радиостанций осуществляется по сигналам с приемника ГЛОНАСС на границах зон устойчивой радиосвязи, а также при движении в зоне неустойчивой радиосвязи через мобильные локомотивные ретрансляторы поездов, идущих вслед или перед поездом; с радиостанций прицепных тележек на станционные радиостанции передается информация о местонахождении тележки и состоянии путевых участков за хвостом поезда; прерывание передачи информации не вызывает опасных последствий для движения поездов, может происходить только задержка поезда; обмен информацией между постами ЭЦ станции отправления и станции приема о состоянии перегонных путевых участках, об изменении направления движения на перегоне, а также передаче информации на переезды о приближении поезда, передача информации с переездов на станции осуществляется по оптоволоконному кабелю между станциями и переездами [Патент.2739086 (РФ). Способ регулирования движения поездов и устройство контроля состояний путевых участков для его осуществления / Полевой Ю.И. - Опубл. 21.12.2020 Бюл. №36, МПК В61L 23/16.].
Недостатком способа является использование кабельных линий, для надежной работы которых, требуется прокладка резервного кабеля, желательно, с другой стороны ж.д. полотна относительно проложенной основной кабельной линии.
Данные техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом, на достижение которого направлено данное техническое решение, является осуществление регулирования движения поездов мобильной системой ИРДП с контролем давления в тормозной магистрали, и осуществление торможения поездом посредством электропневматического клапана ЭПК, расположенного в хвосте поезда. Указанные дополнительные функции реализуются с использованием радиосвязи между локомотивом и приборами, расположенными в хвосте поезда.
В качестве дублирующей системы может быть использована четырехпроводной системы контроля состояний рельсовых линий РЛ с тональными рельсовыми цепями ТРЦ [Патент 2732181 (РФ). Способ регулирования движения поездов / Полевой Ю.И. - Опубл. 14.09.2020 Бюл. №26, МПК В61L 23/16.]. Это позволит повысить достоверность контроля состояний перегонных путевых участков и повысить надежность действия перегонных систем ИРДП.
Для контроля состояний станционных РЦ может быть использован способ, представленный в патенте [Патент.2735872 (РФ). Способ регулирования движения поездов / Полевой Ю.И. - Опубл. 09.11.2020 Бюл. №31, МПК В61L 23/16.]
Для контроля целостности рельсовых нитей локомотивными приборами могут быть использованы технические решения, представленные в патентах №2705541, №2706607, №2710840 и №2712361.
Способ регулирования движения поездов, основанный на контроле состояний перегонных путевых участков осуществляется с участием ЭВМ станции приема ЭВМП, ЭВМ станции отправления ЭВМО, локомотивной ЭВМ ЭВМЛ, радиостанции станции приема РССП, радиостанции станции отправления РССО, при этом с локомотивной радиостанции РСЛ, находящейся в зоне связи со станционной радиостанцией, на пост ЭЦ передают информацию о координате головы поезда, на Л с поста ЭЦ передают информацию о состоянии перегонных и станционных путевых участков, установленных маршрутах на станциях приема, ЭВМЛ с учетом принятой информации и информации, хранящейся в памяти о параметрах поезда и пути, путевого развития станций определяют оптимальную скорость ведения поезда, а также рекомендуемые позиции локомотивного контроллера и крана машиниста, которые управляют электромеханическим устройством; обмен информацией между постами ЭЦ станции отправления и станции приема о состоянии перегонных путевых участках, изменении направления движения на перегоне, информацию на переезды о приближении поездов, информацию с переездов об их работе осуществляют по оптоволоконным кабелям, проложенным между станциями и между станцией и переездом [Патент №2739086], контроль состояний путевых участков основан на подаче в рельсовую линию РЛ сигнала тональной частоты с прицепной тележки ПТ, которая находится между последней осью хвостового вагона ХВ и осью ПТ, сравнением текущего значения тока генератора Г с пороговым значением, отличающийся тем, что на оси ПТ устанавливают источник питания ИП для питания приборов ПТ, осевой датчик ОД для контроля за движением ПТ; на ПТ устанавливают генератор Г для питания РЦ, шунт R и преобразователь напряжения ПН для преобразования аналогового сигнала в цифровой, электропневматический клапан ЭПКПТ и электромеханический манометр МЭМ для регулирования и контроля давления в тормозной магистрали ТМ, контроллер К для осуществления контроля за давлением в ТМ и управления приборами ПТ; для обмена информацией между Л и ПТ устанавливают радиостанцию РСПТ;
на постах ЭЦ кроме радиостанций РССП и РССО устанавливают ЭВМ ЭВМП и ЭВМО; на Л - радиостанцию РСЛ, ЭВМ ЭВМЛ и приемник ГЛОНАСС ПГЛ;
ХВ соединен с ПТ автосцепкой, в буксире ПТ крепится изолятор для исключения электрической цепи между корпусом ХВ и корпусом ПТ; между соединительными рукавами ПТ и ХВ монтируют наконечники НТМ;
на станции П и О предусмотрены ЭВМ ЭВМП и ЭВМО, которые формируют и расшифровывают команды, радиостанции РССП и РССО передают и воспринимают команды с этих ж. д. станций; на ПТ и на Л также установлены радиостанция РСПТ и РСЛ для обмена информацией между ПТ и Л, а на Л - ЭВМ ЭВМЛ для формирования и расшифровке команд, приемник ГЛОНАСС ПГЛ - для определения местонахождения локомотива;
для контроля исправности рельс генератор Г одним полюсом подсоединяют к корпусу ХВ другим через шунт R - к корпусу ПТ;
ток от Г протекает по РЛ контрольного участка, который ограничен шунтами колесных пар ХВ и ПТ; напряжение, падающее на шунте R, прикладывается к входу преобразователя напряжения ПН, с выхода которого цифровой сигнал поступает на вход контроллера К, который фиксирует исправность/неисправность рельсовых нитей РН контрольного участка, информация о котором с помощью радиостанций РСПТ и РСЛ предают на ЭВМЛ для обработки и последующей передачи на посты ЭЦ станций П и О с участием РССП и РССО;
для питания устройств ПТ предусмотрен источник питания ИП - осевой генератор в буфере с аккумуляторной батареей (на фиг.1 питающие цепи не показаны), для контроля за перемещением ПТ установлен осевой датчик ОД оборотов колесной пары, благодаря которому контроллер К определяет скорость движения ПТ, значение которой передается на Л, где ЭВМЛ сравнивает ее со скоростью движения Л, что позволяет определить следование поезда в полном составе, и, как следствие, координату местонахождения ПТ;
снижение давления в тормозной магистрали ТМ осуществляет хвостовой электропневматический клапан ЭПКПТ прицепной тележки, с участием шлангов тормозной магистрали ТМ и наконечника НТМ, команду на торможение выдает К, контроль давления ТМ осуществляет электромеханический манометр МЭМ, информация о величине давления поступает в К, которая передается по радиоканалу на Л.
Краткое описание чертежей
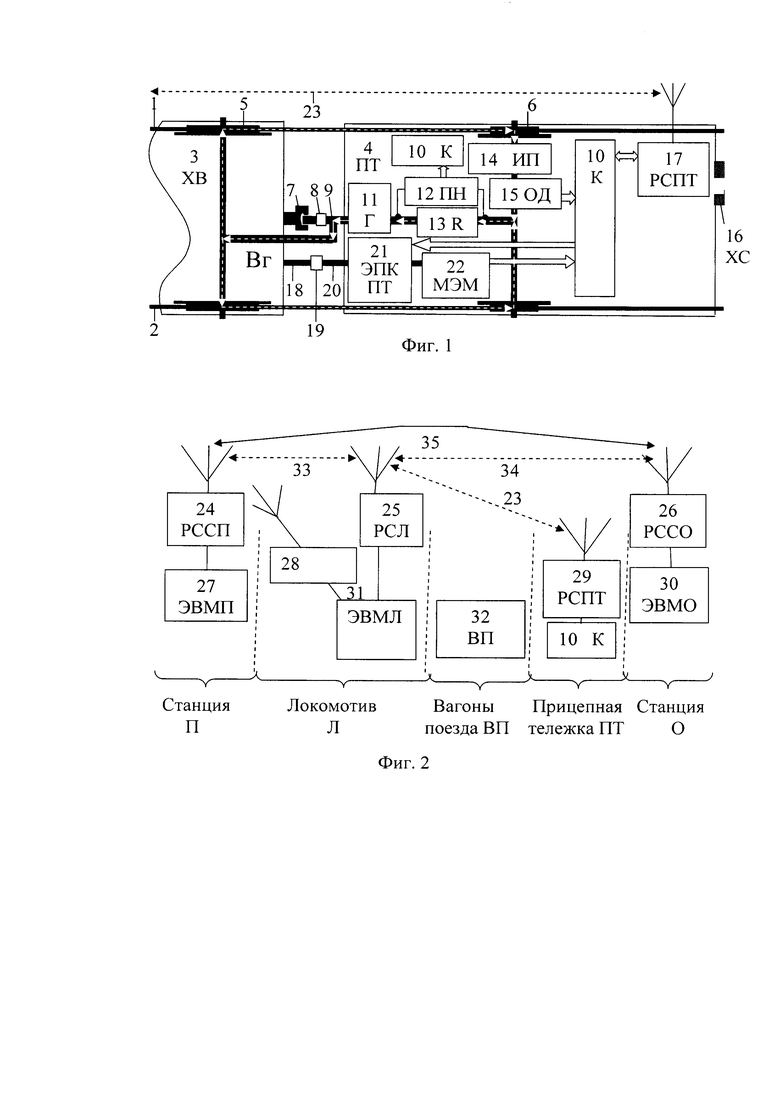
На фиг. 1 представлена структурная схема устройства для реализации способа регулирования движения поездов; на фиг. 2 - структурная схема связи локомотива с двумя ближайшими станциями и аппаратурой прицепной тележки поезда.
Описание изобретения
На фиг. 1 и 2 представлены следующие обозначения:
1 - первый рельс;
2 - второй рельс;
3 - хвостовой вагон поезда ХВ;
4 - прицепная тележка ПТ;
5 - колесная пара хвостового вагона;
6 - колесная пара прицепной тележки;
7 - автосцепка хвостового вагона с прицепной тележкой;
8 - изолятор в буксире прицепной тележки;
9 - жесткая тяга прицепной тележки;
10 - контроллер К;
11 - генератор Г;
12 - преобразователь напряжения ПН;
13 - шунт R;
14 - источник питания ИП (осевой генератор напряжения, включенный в буфере с аккумулятором);
15 - осевой датчик ОД вращения колесной пары прицепной тележки;
16 – Хвостовой сигнал ХС;
17 - радиостанция прицепной тележки с антенной РСПТ;
18 - соединительный рукав тормозной магистрали последнего вагона;
19 - наконечники тормозной магистрали последнего вагона и прицепной тележки соединенные вместе НТМ
20 - соединительный рукав тормозной магистрали прицепной тележки;
21 - электропневматический клапан прицепной тележки ЭПКПТ;
22 - электромеханический манометр МЭМ;
23 - канал связи между локомотивной радиостанцией РСЛ и радиостанцией прицепной тележки РСПТ;
24 - радиостанция ж. д. станции приема П с антенной - РССП;
25 - локомотивная радиостанция с антенной РСЛ;
26 - радиостанция ж. д. станции отправления О с антенной - РССО;
27- ЭВМ станции приема П - ЭВМП;
24 - локомотивная ЭВМ - ЭВМЛ;
28 -приемник ГЛОНАСС ПГЛ;
29 - радиостанция прицепной тележки с антенной РСПТ;
30- ЭВМ станции отправления О - ЭВМО;
31- локомотивная ЭВМ ЭВМЛ;
32 - вагоны поезда ВП;
33, 34, 35 - каналы связи между радиостанциями постов ЭЦ, локомотивной радиостанцией, прицепной тележкой.
Представленный способ основан на контроле следования поезда в полном составе, контроле целостности рельсовых нитей за хвостом поезда, передаче информации на посты ЭЦ станций ограничивающий перегон о следовании поезда в полном составе, контроле целостности рельсовых нитей за хвостом поезда, передачи информации на посты ЭЦ о местонахождении поезда, передаче информации на локомотив о состоянии перегонных и станционных путевых участков, об установленных на станции приема маршрутах, управлении ЭПК прицепной тележки с локомотива, контроле на локомотиве давлении воздуха в тормозной магистрали в хвостовой части поезда.
Техническим результатом, на достижение которого направлено данное техническое решение, является осуществление регулирования движения поездов мобильной системой ИРДП с контролем давления в тормозной магистрали, и осуществление торможения поездом посредством электропневматического клапана ЭПК, расположенного в хвосте поезда. Указанные дополнительные функции реализуются с использованием радиосвязи между локомотивом и приборами, расположенными в хвосте поезда.
В качестве дублирующей системы контроля состояний рельсовых линий РЛ на перегоне может быть использована четырехпроводная система с тональными рельсовыми цепями ТРЦ [Патент 2732181 (РФ). Способ регулирования движения поездов / Полевой Ю.И. - Опубл. 14.09.2020 Бюл. №26, МПК В61L 23/16.]. Это позволит повысить достоверность контроля состояний перегонных путевых участков и повысить надежность действия перегонных систем ИРДП.
В качестве дублирующей системы контроля состояний станционных РЦ может быть использована система, представленная в патенте №2735872 [Патент.2735872 (РФ). Способ регулирования движения поездов / Полевой Ю.И. - Опубл. 09.11.2020 Бюл. №31, МПК В61L 23/16.]
Для контроля целостности рельсовых нитей локомотивными устройствам могут быть использованы технические решения, представленные в патентах №2705541, №2706607, №2710840 и №2712361. Это позволит существенно снизить тяжесть последствий при изломе рельса под локомотивом или вагонами для движущегося поезда.
Способ регулирования движения поездов, основанный на контроле состояний перегонных путевых участков осуществляется с участием ЭВМ станции приема ЭВМП 27 (фиг. 2), ЭВМ станции отправления ЭВМО 30, локомотивной ЭВМ ЭВМЛ 31, радиостанции станции приема РССП 24, радиостанции станции отправления РССО 26.
С локомотивной радиостанции РСЛ 26, находящейся в зоне связи со станционной радиостанцией, на пост ЭЦ передают информацию о координате головы поезда, на Л с поста ЭЦ передают информацию о состоянии перегонных и станционных путевых участков, установленных маршрутах на станциях приема, ЭВМЛ 31 с учетом принятой информации и информации, хранящейся в памяти о параметрах поезда и пути, путевого развития станций определяет оптимальную скорость ведения поезда, а также рекомендуемые позиции локомотивного контроллера и крана машиниста, которые управляют электромеханическим устройством.
Обмен информацией между постами ЭЦ станции отправления и станции приема о состоянии перегонных путевых участках, изменении направления движения на перегоне, информацию на переезды о приближении поездов, информацию с переездов об их работе осуществляют по оптоволоконным кабелям, проложенным между станциями 35 и кабелям, проложенным между станцией и переездом [Патент №2739086],
Контроль состояний путевых участков основан на подаче в рельсовую линию РЛ сигнала тональной частоты с прицепной тележки ПТ 4 (фиг. 1), которая находится между последней осью хвостового вагона ХВ 3 и осью ПТ 4, сравнением текущего значения тока генератора Г 11 с пороговым значением.
На оси ПТ 4 устанавливают источник питания ИП 14 для питания приборов ПТ 4, осевой датчик ОД 15 для контроля за движением ПТ 4, на Пт устанавливают генератор Г 11 для питания РЦ; шунт R 13 и преобразователь напряжения ПН 12 для преобразования аналогового сигнала в цифровой; электропневматический клапан ЭПКПТ 21 и электромеханический манометр МЭМ 22 - для регулирования и контроля давления в тормозной магистрали ТМ. Контроллер К 10 предназначен для осуществления контроля за давлением в ТМ и управления приборами ПТ; для обмена информацией между Л и ПТ 4 устанавливают радиостанцию РСПТ 17.
На постах ЭЦ, кроме радиостанций РССП 24 и РССО 26, устанавливают ЭВМ ЭВМП 27 и ЭВМО 26; на Л - радиостанцию PC 25 Л, ЭВМ ЭВМЛ 31 и приемник ГЛОНАСС ПГЛ 28. ХВ 3 соединен с ПТ 4 автосцепкой, в буксире ПТ 4 крепится изолятор 8 для исключения электрической цепи между корпусом ХВ 3 и корпусом ПТ 4; между соединительными рукавами ХВ 3 и ПТ 4 монтируют наконечники НТМ 19.
На станции П и О предусмотрены ЭВМ ЭВМП 27 и ЭВМО 26, которые формируют и расшифровывают команды, радиостанции РССП 24 и РССО 26 передают и воспринимают команды с этих ж. д. станций; на ПТ 4 и на Л также установлены радиостанция РСПТ 17 и РСЛ 25 для обмена информацией между ПТ 4и Л, а на Л - ЭВМ ЭВМЛ 31 для формирования и расшифровке команд, приемник ГЛОНАСС ПГЛ 28 - для определения местонахождения локомотива.
Для контроля исправности рельс генератор Г 11 одним полюсом подсоединяют к корпусу ХВ 3 другим через шунт R13 - к корпусу ПТ 4; ток от Г 11 протекает по РЛ контрольного участка, который ограничен шунтами колесных пар ХВ 3 и ПТ 4; напряжение, падающее на шунте R 13, прикладывается к входу преобразователя напряжения ПН 12, с выхода которого цифровой сигнал поступает на вход контроллера К 10, который фиксирует исправность/неисправность рельсовых нитей РН контрольного участка, информация о котором с помощью радиостанций РСПТ29 и РСЛ 25 предают на ЭВМЛ 31 для обработки и последующей передачи на посты ЭЦ станций П и О с участием РССП 24 и РССО 26.
Для питания устройств ПТ 4 предусмотрен источник питания ИП 14 -осевой генератор в буфере с аккумуляторной батареей (на фиг. 1 питающие цепи не показаны), для контроля за перемещением ПТ 4 установлен осевой датчик ОД 15 оборотов колесной пары, благодаря которому контроллер К 10 определяет скорость движения ПТ 4, значение которой передается на Л, где ЭВМЛ 31 сравнивает ее со скоростью движения Л, что позволяет определить следование поезда в полном составе, и, как следствие, координату местонахождения ПТ 4.
Снижение давления в тормозной магистрали ТМ осуществляет хвостовой электропневматический клапан ЭПКПТ 21 прицепной тележки, с участием шлангов тормозной магистрали ТМ и наконечника НТМ 19, команду на торможение выдает К 10, контроль давления ТМ осуществляет электромеханический манометр МЭМ 22, информация о величине давления поступает в К 10, которая передается по радиоканалу на Л.
Системы интервального регулирования движения поездов ИРДП действуют по единому алгоритму: определяется свободности и исправность путевых участков, полученная информация передается на подвижной состав. Для реализации системы нужны датчики состояний рельсовых линий -рельсовые цепи, оптические или/и индуктивные системы передачи информации. Все это требует больших капитальных и эксплуатационных затрат, а также время на проектирование и строительство систем ИРДП. Использование предложенного способа в сочетании с микропроцессорной системой централизации МПЦ существенно снижает затраты на строительство, эксплуатацию и время на ввод в эксплуатацию беспроводных систем ИРДП. Нет необходимости в использовании напольного оборудования (типовых рельсовых цепей РЦ, проводных линий связи, высоковольтных линий). Вместе с тем, существенно повышается пропускная способность, технико-экономические показатели системы, расширяются функциональные возможности. Указанные преимущества достигаются за счет ПТ с приборным блоком, снабженного контрольно-управляющей аппаратурой; локомотивных и станционных ЭВМ и радиостанций. Также нет необходимости в формировании поездного состава по принципу - в голову тяжелые подвижные единицы, в хвост - легкие.
Изобретение относится к методам регулирования движения поездов. В способе определяют свободность и исправность путевых участков, полученную информация передают на подвижной состав. Для реализации способа на перегонах предусмотрены рельсовые соединители для пропуска обратного тягового тока и перемычки между рельсами одного или разных путей для уравнивания тягового тока, устройства переездной сигнализации, кроме того введена прицепная тележка с приборным блоком, снабженным контрольно-управляющей аппаратурой; локомотивные и станционные ЭВМ и радиостанции. Достигается возможность регулирования движения поездов беспроводной схемой автоблокировки. 2 ил.
Способ регулирования движения поездов, основанный на контроле состояний перегонных путевых участков, осуществляется с участием ЭВМ станции приема ЭВМП, ЭВМ станции отправления ЭВМО, локомотивной ЭВМ ЭВМЛ, радиостанции станции приема РССП, радиостанции станции отправления РССО, при этом с локомотивной радиостанции РСЛ, находящейся в зоне связи со станционной радиостанцией, на пост ЭЦ передают информацию о координате головы поезда, на локомотив Л с поста ЭЦ - информацию о состоянии перегонных и станционных путевых участков, установленных маршрутах на станциях приема, ЭВМЛ с учетом принятой информации и информации, хранящейся в памяти о параметрах поезда и пути, путевого развития станций определяют оптимальную скорость ведения поезда, а также рекомендуемые позиции локомотивного контроллера и крана машиниста, которые управляют электромеханическим устройством; обмен информацией между постами ЭЦ станции отправления и станции приема о состоянии перегонных путевых участков, изменении направления движения на перегоне, информацию на переезды о приближении поездов, информацию с переездов об их работе осуществляют по оптоволоконным кабелям, проложенным между станциями и между станцией и переездом, контроль состояний путевых участков основан на подаче в рельсовую линию РЛ сигнала тональной частоты с прицепной тележки ПТ, которая находится между последней осью хвостового вагона ХВ и осью ПТ, сравнением текущего значения тока генератора Г с пороговым значением, отличающийся тем, что на оси ПТ устанавливают источник питания ИП для питания приборов ПТ, осевой датчик ОД для контроля за движением ПТ, генератор Г для питания РЦ; шунт R и преобразователь напряжения ПН для преобразования аналогового сигнала в цифровой; электропневматический клапан ЭПКПТ и электромеханический манометр МЭМ для регулирования и контроля давления в тормозной магистрали ТМ; контроллер К для осуществления контроля за давлением в ТМ и управления приборами ПТ; для обмена информацией между Л и ПТ устанавливают радиостанцию РСПТ;
на постах ЭЦ кроме радиостанций РССП и РССО устанавливают ЭВМ ЭВМП и ЭВМО; на Л - радиостанцию РСЛ, ЭВМ ЭВМЛ и приемник ГЛОНАСС ПГЛ;
ХВ соединен с ПТ автосцепкой, в буксире ПТ крепится изолятор для исключения электрической цепи между корпусом ХВ и корпусом ПТ; между соединительными рукавами ПТ и ХВ монтируют наконечники НТМ;
на станции П и О предусмотрены ЭВМ ЭВМП и ЭВМО, которые формируют и расшифровывают команды, радиостанции РССП и РССО передают и воспринимают команды с этих железнодорожных станций; на ПТ и на Л также установлены радиостанция РСПТ и РСЛ для обмена информацией между ПТ и Л, а на Л - ЭВМ ЭВМЛ для формирования и расшифровки команд, приемник ГЛОНАСС ПГЛ - для определения местонахождения локомотива;
для контроля исправности рельс генератор Г одним полюсом подсоединяют к корпусу ХВ другим через шунт R - к корпусу ПТ;
ток от Г протекает по РЛ контрольного участка, который ограничен шунтами колесных пар ХВ и ПТ; напряжение, падающее на шунте R, прикладывается к входу преобразователя напряжения ПН, с выхода которого цифровой сигнал поступает на вход контроллера К, который фиксирует исправность/неисправность рельсовых нитей РН контрольного участка, информация о котором с помощью радиостанций РСПТ и РСЛ предают на ЭВМЛ для обработки и последующей передачи на посты ЭЦ станций П и О с участием РССП и РССО;
для питания устройств ПТ предусмотрен источник питания ИП - осевой генератор в буфере с аккумуляторной батареей, для контроля за перемещением ПТ установлен осевой датчик ОД оборотов колесной пары, благодаря которому контроллер К определяет скорость движения ПТ, значение которой передается на Л, где ЭВМЛ сравнивает ее со скоростью движения Л, что позволяет определить следование поезда в полном составе и, как следствие, координату местонахождения ПТ;
снижение давления в тормозной магистрали ТМ осуществляет хвостовой электропневматический клапан ЭПКПТ прицепной тележки с участием шлангов тормозной магистрали ТМ и наконечника НТМ, команду на торможение выдает К, контроль давления ТМ осуществляет электромеханический манометр МЭМ, информация о величине давления поступает в К, которая передается по радиоканалу на Л.
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЙ ПУТЕВЫХ УЧАСТКОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2739086C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2020 |
|
RU2730699C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ РЕЛЬСОВЫХ НИТЕЙ | 2020 |
|
RU2727427C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ БЕЗ НАПОЛЬНЫХ УСТРОЙСТВ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ | 2019 |
|
RU2712364C1 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ РЕЛЬСОВЫХ НИТЕЙ ПО СООТНОШЕНИЮ ЗНАЧЕНИЙ ТОКОВ В РЕЛЬСАХ | 2019 |
|
RU2706607C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ СИСТЕМОЙ АВТОБЛОКИРОВКИ С ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ АППАРАТУРЫ | 2017 |
|
RU2662313C1 |
| Устройство для автоматической электрической сигнализации о разрыве поезда | 1947 |
|
SU71193A1 |

