Изобретение касается способа определения нагрузки, поднятой или поднимаемой гидравлическим подъемным устройством, с признаками ограничительной части п.1 формулы изобретения, блока управления, выполненного для осуществления такого способа для гидравлического подъемного устройства, а также гидравлического подъемного устройства, имеющего такое управление.
Способ определения нагрузки, поднятой или поднимаемой гидравлическим подъемным устройством, в соответствии с родовым понятием известен из EP 1 477 452 B1. В описанном способе для крана, имеющего приводимые в действие вручную или гидравлические элементы стрелы, для взвешивания нагрузки, которая должна размещаться на управляемом вручную элементе стрелы крана, сначала на фазе опробования кран приводится в предопределенное положение. Это предопределенное положение может быть пригодно для захвата нагрузки. После этого на установленном на кране, приводимом в действие вручную элементе стрелы выполняются измерения давления на главном цилиндре для разных, в частности по меньшей мере двух, положений гидравлических элементов стрелы между полностью втянутыми и полностью выдвинутыми гидравлическими элементами стрелы, и отсюда составляется показательный график для этого заданного положения крана. Эта фаза опробования происходит у производителя крана.
На следующей фазе определяется нагрузка, размещенная на приводимом в действие вручную элементе стрелы. Для этого ненагруженный кран приводится в заданное, пригодное для захвата нагрузки положение. Нахождение давления в главном цилиндре и сравнение с относящимся к этому положению показательным графиком дает смещение точки повеса располагаемой нагрузки (длина плеча нагрузки). После размещения нагрузки из разности между зарегистрированным давлением в ненагруженном и нагруженном состоянии крана может определяться нагрузка.
Недостатком этого известного в уровне техники способа является то, что определение нагрузки может осуществляться, в принципе, только в одном предопределенном положении крана. Перед захватом нагрузки кран должен приводиться в положение, для которого производителем крана был снят показательный график. Также после захвата нагрузки для ее определения кран должен находиться в соответствующем положении. Определение нагрузки может, кроме того, осуществляться только в той конфигурации (оснащении) крана, в которой производителем крана осуществлено выполнение фазы опробования, то есть съем показательного графика. Поэтому при изменении конфигурации крана или, соответственно, оснащения крана может случиться, что снятые производителем крана показательные графики больше не смогут использоваться для определения нагрузки.
Задачей изобретения является указать способ определения нагрузки, поднятой или поднимаемой гидравлическим подъемным устройством, при котором не возникают вышеназванные недостатки.
Эта задача решается с помощью способа с признаками п.1 формулы изобретения, блока управления, выполненного для осуществления такого способа, и гидравлического подъемного устройства, имеющего такой блок управления. Предпочтительные варианты осуществления изобретения определены в зависимых пунктах формулы изобретения.
Как и в способе определения нагрузки, поднятой или поднимаемой гидравлическим подъемным устройством, в соответствии с родовым понятием, например, в виде гидравлического погрузочного крана, сначала подъемное устройство на контрольной фазе приводится в контрольное положение. При этом подъемное устройство может находиться в первом нагруженном состоянии.
Однако в противоположность известным из уровня техники способам, теперь при предлагаемом изобретением способе в контрольном положении контрольной фазы осуществляется первая регистрация мгновенно действующих на подъемное устройство сил и мгновенной геометрии подъемного устройства. Путем регистрации мгновенно действующих на подъемное устройство сил и мгновенной геометрии подъемного устройства при определении поднятой или поднимаемой нагрузки может учитываться текущая конфигурация крана или, соответственно, оснащение крана и текущая геометрия (положение), в котором находится подъемное устройство. Так, может также одновременно учитываться мгновенное (первое) нагруженное состояние подъемного устройства. Говоря другими словами, возможность определения поднятой или поднимаемой нагрузки может обеспечиваться, исходя из действующих в настоящее время рабочих параметров подъемного устройства. Так, например, мгновенно действующие при эксплуатации рабочие параметры подъемного устройства могут регистрироваться в качестве исходной точки для определения поднятой или поднимаемой нагрузки.
При предлагаемом изобретением способе после этого следует фаза измерения, на которой подъемное устройство находится во втором рабочем состоянии, и подъемное устройство приводится в положение измерения. В положении измерения осуществляется вторая регистрация мгновенно действующих на подъемное устройство сил и мгновенной геометрии подъемного устройства. Аналогично первой регистрации, определение поднятой или поднимаемой нагрузки может осуществляться с использованием действующих в настоящее время рабочих параметров подъемного устройства.
На фазе сравнения, следующей за первой и второй регистрацией сил, действующих на подъемное устройство, и геометрии, путем сравнения соответствующих зарегистрированных мгновенно действующих на подъемное устройство сил и соответствующей зарегистрированной мгновенной геометрии подъемного устройства характеризуется поднятая нагрузка. Так как это сравнение зарегистрированных сил и зарегистрированных геометрий (положений) базируется на мгновенно действующих рабочих параметрах, поднятая или, соответственно, поднимаемая нагрузка может характеризоваться очень точно. Так, например, фаза измерения может выполняться непосредственно после контрольной фазы, при этом получающиеся на фазе сравнения разности зарегистрированных сил могут объясняться исключительно изменением нагруженного состояния подъемного устройства, причем при характеристике нагрузки могут также учитываться изменения данной зарегистрированной или, соответственно, действующей геометрии.
Таким образом, для определения поднятой или поднимаемой подъемным устройством нагрузки нет зависимости от выполняемой производителем крана фазой опробования и связанных с ней, ограниченно применимых показательных графиков. Сам производитель крана благодаря предлагаемому изобретением способу может избежать выполнения фазы опробования, требующего большого количества времени. С помощью предлагаемого изобретением способа при определении поднятой или поднимаемой подъемным устройством нагрузки могут, например, также легко учитываться явления старения и износа подъемного устройства.
Не должно быть исключено, чтобы выполнение фазы измерения могло осуществляться по существу сколь угодно часто после выполнения контрольной фазы.
При этом может быть предпочтительно, чтобы контрольное положение соответствовало свободно выбираемому положению подъемного устройства. При этом выполнение способа может осуществляться, исходя по существу из любого положения подъемного устройства. Это может позволить не приводить подъемное устройство обязательно в предопределенное положение, в частности перед выполнением контрольной фазы.
В принципе, может быть предпочтительно, чтобы положение измерения соответствовало положению подъемного устройства после захвата нагрузки или снятия нагрузки. При этом положение измерения может также соответствовать положению подъемного устройства непосредственно после захвата или снятия нагрузки. Положение измерения может также соответствовать положению подъемного устройства, которое получается вследствие (в данном случае незначительного) изменения положения сразу после захвата нагрузки или снятия нагрузки.
Может быть предпочтительно, чтобы положение измерения соответствовало положению подъемного устройства, приближенному к контрольному положению подъемного устройства. При этом получающиеся на фазе сравнения разности зарегистрированных сил могут по большей части объясняться изменением нагруженного состояния подъемного устройства вследствие поднятой или, соответственно, поднимаемой нагрузки. Изменения зарегистрированных сил вследствие изменения геометрии, например, обусловленного изменением смещения, могут в этом случае составлять меньшую долю. Приближение положения измерения к контрольному положению может быть получено, например, таким образом, что подъемное устройство для захвата или снятия нагрузки выдвигается из контрольного положения, и затем для выполнения фазы измерения положение подъемного устройства возвращается в направлении контрольного положения.
Может быть предпочтительно, чтобы положение измерения подъемного устройства по существу соответствовало контрольному положению. При этом получающиеся на фазе сравнения разности зарегистрированных сил могут по существу объясняться изменением нагруженного состояния подъемного устройства вследствие поднятой или, соответственно, поднимаемой нагрузки.
Может быть также предпочтительно, чтобы контрольное положение соответствовало положению, приближенному к некоторому промежуточному положению, причем это промежуточное положение является положением подъемного устройства, пригодным для захвата нагрузки или снятия нагрузки. Это может быть предпочтительно, когда, например, положение подъемного устройства, в котором должна определяться поднятая нагрузка, не пригодно для захвата или снятия нагрузки. Это может также позволить удалить контрольное положение, а также положение измерения от промежуточного положения, пригодного для захвата нагрузки или снятия нагрузки.
При этом может быть предпочтительно, чтобы перевод подъемного устройства из контрольного положения в промежуточное положение и перевод подъемного устройства из промежуточного положения в положение измерения осуществлялся при изменении положения подъемного устройства, лежащем в некотором поле допусков. При изменениях положения подъемного устройства в указанном поле допусков можно получить возможность использовать зарегистрированные на контрольной фазе силы и зарегистрированную геометрию также на фазе измерения для определения поднятой или поднимаемой нагрузки. То есть после выполнения контрольной фазы могут выполняться по существу любые, лежащие в этом поле допусков изменения положения подъемного устройства, без необходимости перед выполнением фазы измерения повторного выполнения контрольной фазы. При этом при выполнении фазы измерения положение измерения может также отклоняться от контрольного положения в этом поле допусков.
Может быть предпочтительно, чтобы перед каждым выполнением фазы измерения для регистрации сил, мгновенно действующих во втором нагруженном состоянии на подъемное устройство, и мгновенной геометрии подъемного устройства осуществлялось выполнение контрольной фазы для регистрации сил, мгновенно действующих в первом нагруженном состоянии на подъемное устройство, и мгновенной геометрии подъемного устройства. Говоря другими словами, предусмотрено, чтобы перед каждым захватом нагрузки или снятием нагрузки подъемного устройства осуществлялось выполнение контрольной фазы. Выполнение фазы измерения может осуществляться по существу сколь угодно часто после выполнения контрольной фазы. Также не должно быть исключено, чтобы выполнение фазы измерения могло осуществляться сколь угодно часто после лежащего в указанном поле допусков изменения положения подъемного устройства.
Может быть предусмотрено, чтобы регистрация сил, мгновенно действующих на подъемное устройство, и мгновенной геометрии подъемного устройства осуществлялась с использованием характеристических для каждого положения подъемного устройства и каждого нагруженного состояния подъемного устройства параметров и расчетной модели. Причем эти характеристические параметры могут соответствовать действующим на подъемное устройство силам и геометрии подъемного устройства. В расчетной модели может быть заложена информация о подъемном устройстве, такая как, например, его возможная, а также настоящая конфигурация или, соответственно, оснащение.
Подъемное устройство может иметь по меньшей мере одну вращающуюся вокруг вертикальной оси вращения крановую мачту и опертую на крановую мачту с возможностью поворота вокруг первой горизонтальной оси поворота главную стрелу. Также подъемное устройство может иметь по меньшей мере один гидравлический главный цилиндр для поворота главной стрелы, при этом на контрольной фазе и фазе измерения регистрируется момент относительно первой горизонтальной оси поворота. В простом случае, например, с использованием угла поворота и длины главной стрелы, а также зарегистрированного в главном цилиндре давления может определяться момент относительно первой горизонтальной оси поворота.
У подъемного устройства может быть также предусмотрено, чтобы оно имело механизм вращения для вращения крановой мачты и опертую на главную стрелу с возможностью поворота вокруг второй горизонтальной оси вращения шарнирно-сочлененную стрелу, имеющую предпочтительно по меньшей мере одну крановую выдвижную стрелу, при этом подъемное устройство имеет также первый гидравлический шарнирно-сочлененный цилиндр для поворота шарнирно-сочлененной стрелы и предпочтительно по меньшей мере один первый гидравлический выдвижной цилиндр для приведения в действие указанной по меньшей мере одной крановой выдвижной стрелы. Такое исполнение может, например, иметь место при исполнении подъемного устройства в виде крана с шарнирно-сочлененной стрелой.
При регистрации сил, мгновенно действующих на подъемное устройство, и мгновенной геометрии подъемного устройства может быть предусмотрено, чтобы характеристические параметры включали в себя по меньшей мере давление в указанном по меньшей мере одном главном цилиндре и/или давление в шарнирно-сочлененном цилиндре и/или угол вращения механизма вращения и/или угол изгиба главной стрелы относительно крановой мачты и/или угол изгиба шарнирно-сочлененной стрелы относительно главной стрелы и/или выдвинутое положение указанной по меньшей мере одной крановой выдвижной стрелы. При надлежащем выборе характеристических параметров силы и геометрия могут регистрироваться полностью и точно.
При этом может быть также предпочтительно, чтобы подъемное устройство имело также опертую на шарнирно-сочлененную стрелу с возможностью поворота вокруг третьей горизонтальной оси поворота приставную шарнирно-сочлененную стрелу, имеющую по меньшей мере одну крановую выдвижную стрелу, при этом подъемное устройство имеет также по меньшей мере один второй гидравлический шарнирно-сочлененный цилиндр для поворота приставной шарнирно-сочлененной стрелы и второй гидравлический выдвижной цилиндр для приведения в действие указанной по меньшей мере одной крановой выдвижной стрелы, и характеристические параметры включают в себя по меньшей мере давление во втором шарнирно-сочлененном цилиндре и/или угол изгиба приставной шарнирно-сочлененной стрелы относительно шарнирно-сочлененной стрелы и/или выдвинутое положение указанной по меньшей мере одной крановой выдвижной стрелы приставной шарнирно-сочлененной стрелы. Такое исполнение может иметь место, например, при исполнении подъемного устройства в виде крана с шарнирно-сочлененной стрелой, имеющей приставную шарнирно-сочлененную стрелу. При этом может быть предусмотрено, чтобы на контрольной фазе и фазе измерения регистрировались момент относительно первой горизонтальной оси поворота и момент относительно третьей горизонтальной оси поворота. Однако при соответствующей регистрации геометрии поднятая или поднимаемая нагрузка может также определяться путем одной только регистрации момента относительно первой горизонтальной оси поворота. Однако при дополнительной регистрации момента относительно третьей горизонтальной оси поворота имеется возможность более точно характеризовать поднятую или поднимаемую нагрузку.
Кроме того, при этом может быть предпочтительно, чтобы подъемное устройство имело также по меньшей мере одно удлинение стрелы, при этом в расчетной модели используется дополнительное смещение указанного по меньшей мере одного удлинения стрелы. Данные, релевантные для удлинения стрелы, могут быть заложены в расчетной модели. Такое, в данном случае приводимое в действие вручную удлинение стрелы может применяться для увеличения зоны досягаемости крановой стрелы или, соответственно, крановой выдвижной стрелы подъемного устройства. Может допускаться возможность расположения удлинения стрелы под задаваемым углом, например, посредством перестановочного устройства, на крановой стреле или, соответственно, крановой выдвижной стреле подъемного устройства.
Кроме того, при этом может быть предпочтительно, чтобы подъемное устройство имело также по меньшей мере одно, в частности установленное на крановой выдвижной стреле, рабочее оборудование, и в расчетной модели использовалась дополнительная, обусловленная этим рабочим оборудованием нагрузка. При этом рабочее оборудование, такое как, например, канатная лебедка, может быть установлено по существу в любом месте подъемного устройства. Но рабочее оборудование, такое как, например, грейфер, может быть также установлено на крановой выдвижной стреле подъемного устройства. Релевантные для рабочего оборудования данные могут быть заложены в расчетной модели, но это не является обязательно необходимым. Путем регистрации сил, мгновенно действующих на подъемное устройство в первом нагруженном состоянии, и мгновенной геометрии подъемного устройства рабочее оборудование, и в данном случае также его положение на подъемном устройстве или, соответственно, относительно подъемного устройства, могут учитываться в определении поднятой или поднимаемой нагрузки.
Может быть предпочтительно, чтобы в расчетной модели использовалась деформация подъемного устройства. Деформация подъемного устройства, вызванная собственным весом и/или поднятой или поднимаемой нагрузкой, может влиять на фактическую геометрию подъемного устройства в каком-либо положении или, соответственно, нагруженном состоянии подъемного устройства. При использовании деформации подъемного устройства в расчетной модели может точнее осуществляться определение поднятой или поднимаемой нагрузки.
При этом может быть предпочтительно, чтобы в расчетной модели использовались деформация крановой мачты и/или главной стрелы и/или шарнирно-сочлененной стрелы и/или указанной по меньшей мере одной крановой выдвижной стрелы подъемного устройства, благодаря чему может лучше характеризоваться фактическая геометрия подъемного устройства в каком-либо положении или, соответственно, нагруженном состоянии подъемного устройства. Аналогично этому использование влияния трений в уплотнениях гидравлических цилиндров может позволять более точно определять поднятую или, соответственно, поднимаемую нагрузку.
При этом может быть предпочтительно, чтобы в расчетной модели применялась деформация в виде корректировки по зарегистрированному углу изгиба и/или в виде корректировки по зарегистрированным выдвинутым положениям, и/или влияние трений в уплотнениях в виде корректировки по зарегистрированным давлениям. Благодаря этому в расчетной модели могут, например, учитываться деформация, получающаяся для определенного положения подъемного устройства, и гидравлическое давление, устанавливающееся для определенного нагруженного состояния или, соответственно, также для определенного положения.
Также при этом может быть предпочтительно, чтобы корректировка осуществлялась в зависимости от зарегистрированных мгновенно действующих на подъемное устройство сил и/или зарегистрированного угла изгиба и/или зарегистрированных выдвинутых положений. При этом можно не только учитывать зависимую от положения или, соответственно, геометрии деформацию подъемного устройства, но и осуществлять это (в данном случае также в комбинации) также в зависимости от поднятой или, соответственно, поднимаемой нагрузки. Также может учитываться деформация, обусловленная оснащением или, соответственно, конфигурацией подъемного устройства. Говоря другими словами, сама степень корректировок может находиться в определенной зависимости от зарегистрированных параметров.
При этом может быть также предпочтительно, чтобы корректировка для деформации осуществлялась в линейной зависимости от зарегистрированного давления и/или в линейной зависимости от зарегистрированного выдвинутого положения и/или корректировка для трений в уплотнениях осуществлялась обратно пропорционально зарегистрированному давлению и в зависимости от направления изменения положения.
Может быть предусмотрено, чтобы первое нагруженное состояние соответствовало нагруженному состоянию без поднятой подъемным устройством нагрузки, а второе нагруженное состояние нагруженному состоянию с поднятой нагрузкой. При этом контрольная фаза стала бы выполняться бы без поднятой нагрузки, а фаза измерения выполняться после осуществленного подъема нагрузки.
Однако не должно быть исключено, чтобы первое нагруженное состояние соответствовало нагруженному состоянию с первой поднятой подъемным устройством нагрузкой, а второе нагруженное состояние нагруженному состоянию со второй, предпочтительно отличающейся от первой, поднятой нагрузкой. При этом контрольная фаза стала бы выполняться с уже поднятой нагрузкой, а фаза измерения выполняться после частичного снятия или дополнительного захвата нагрузки.
Как уже указывалось, предметом заявки является также блок управления для гидравлического подъемного устройства, которое выполнено для осуществления такого, как описан выше, способа определения поднятой или поднимаемой нагрузки.
Таким блоком управления в первом рабочем режиме возможно выполнение контрольной фазы в первом нагруженном состоянии в контрольном положении подъемного устройства для первой регистрации мгновенно действующих на подъемное устройство сил и мгновенной геометрии подъемного устройства.
Во втором рабочем режиме блока управления возможно выполнение фазы измерения во втором нагруженном состоянии в положении измерения подъемного устройства для второй регистрации мгновенно действующих на подъемное устройство сил и мгновенной геометрии подъемного устройства. Блок управления может быть выполнен, например, таким образом, чтобы после выполнения контрольной фазы в первом рабочем режиме автоматически совершался переход во второй рабочий режим. Также может быть, например, предусмотрено, чтобы положение подъемного устройства во втором рабочем режиме могло изменяться только в указанном поле допусков или, соответственно, перед выходом из указанного поля допусков управлением подавался соответственный предупредительный сигнал.
В третьем рабочем режиме управления возможно выполнение фазы сравнения для характеристики поднятой нагрузки путем сравнения соответствующих зарегистрированных мгновенно действующих на подъемное устройство сил и соответствующей зарегистрированной мгновенной геометрии подъемного устройства. При этом может быть, например, предусмотрено, чтобы после выполнения фазы измерения автоматически совершался переход во второй рабочий режим и в данном случае также автоматически выполнялась фаза сравнения.
При этом может быть предпочтительно, чтобы характеризованная на фазе сравнения нагрузка могла отображаться в соответствующих этой нагрузке единицах на дисплее, поддерживающем связь с управлением. При этом пользователю может, например, в понятных для него единицах даваться справка об определенной этим способом нагрузке.
Охрана испрашивается, как уже указывалось, также для гидравлического подъемного устройства, имеющего блок управления, который описан выше. Гидравлическое подъемное устройство может быть выполнено в виде грузоподъемного крана для транспортного средства. Особенно предпочтительно гидравлическое подъемное устройство может быть выполнено в виде крана с шарнирно-сочлененной стрелой.
Другие подробности и преимущества настоящего изобретения поясняются подробнее далее с помощью описания фигур со ссылкой на примеры осуществления, изображенные на чертежах. На них показано:
фиг.1a-1c: виды сбоку разных вариантов осуществления подъемного устройства, смонтированного на транспортном средстве;
фиг.2a-2c: виды сбоку разных вариантов осуществления подъемного устройства;
фиг.3a и 3b: виды сбоку разных вариантов осуществления подъемного устройства и в каждом случае схематичное изображение управления с сенсорикой;
фиг.4a-4c: схематичное изображение хода процесса подъема;
фиг.5a-5c: другое схематичное изображение хода процесса подъема;
фиг.6a и 6b: другое схематичное изображение хода процесса подъема;
фиг.7a и 7b: схематичные изображения разных вариантов осуществления подъемного устройства и в каждом случае изображение поля допусков;
фиг.8a и 8b: схематичные изображения разных вариантов осуществления подъемного устройства, имеющего удлинение стрелы;
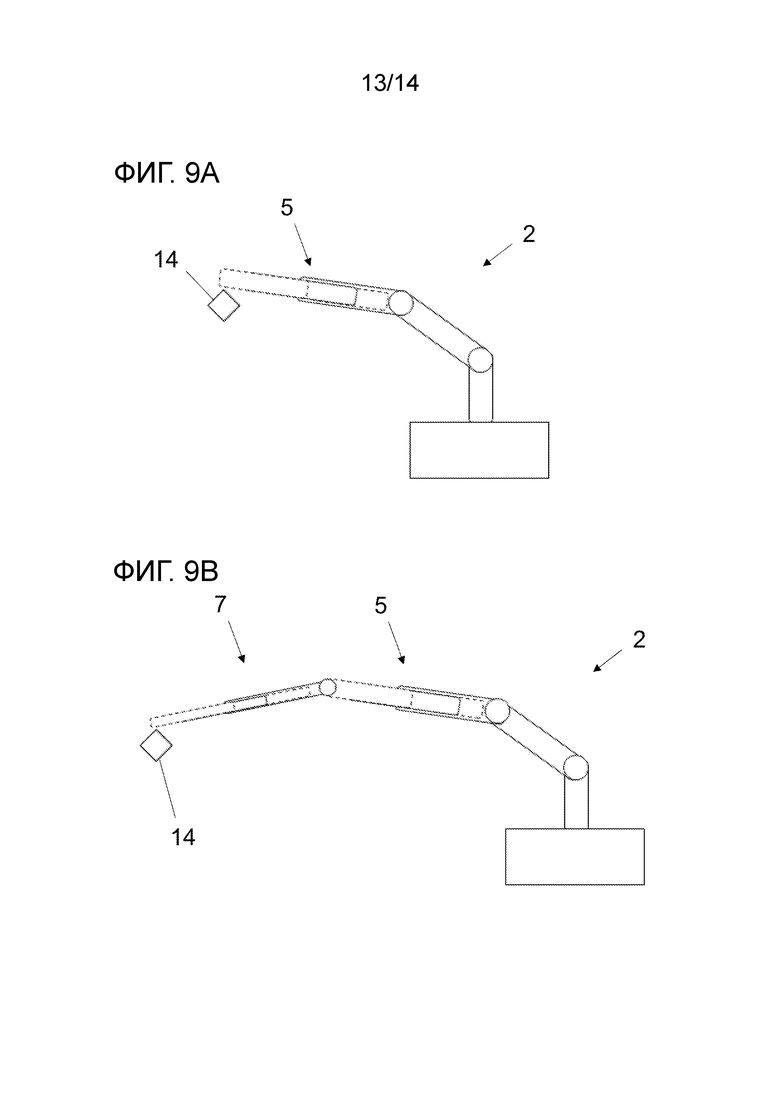
фиг.9a и 9b: схематичные изображения разных вариантов осуществления подъемного устройства, имеющего рабочее оборудование, и
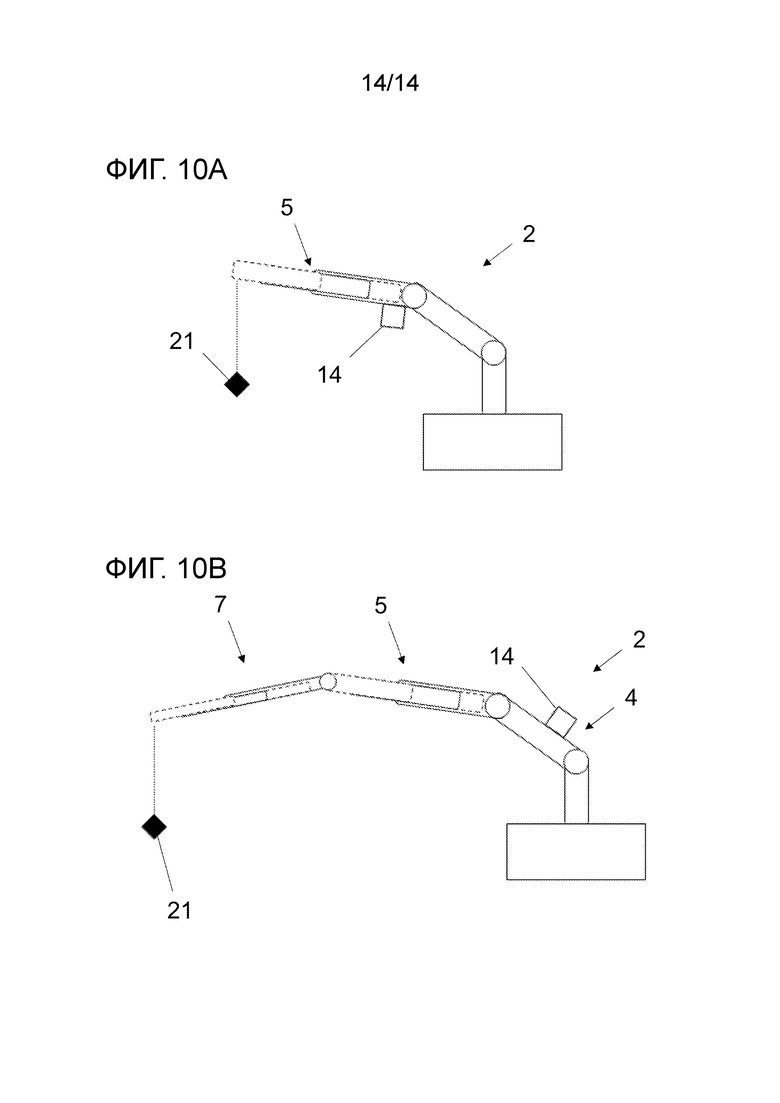
фиг.10a и 10b: схематичные изображения разных вариантов осуществления подъемного устройства, имеющего в каждом случае расположенную в разных положениях канатную лебедку.
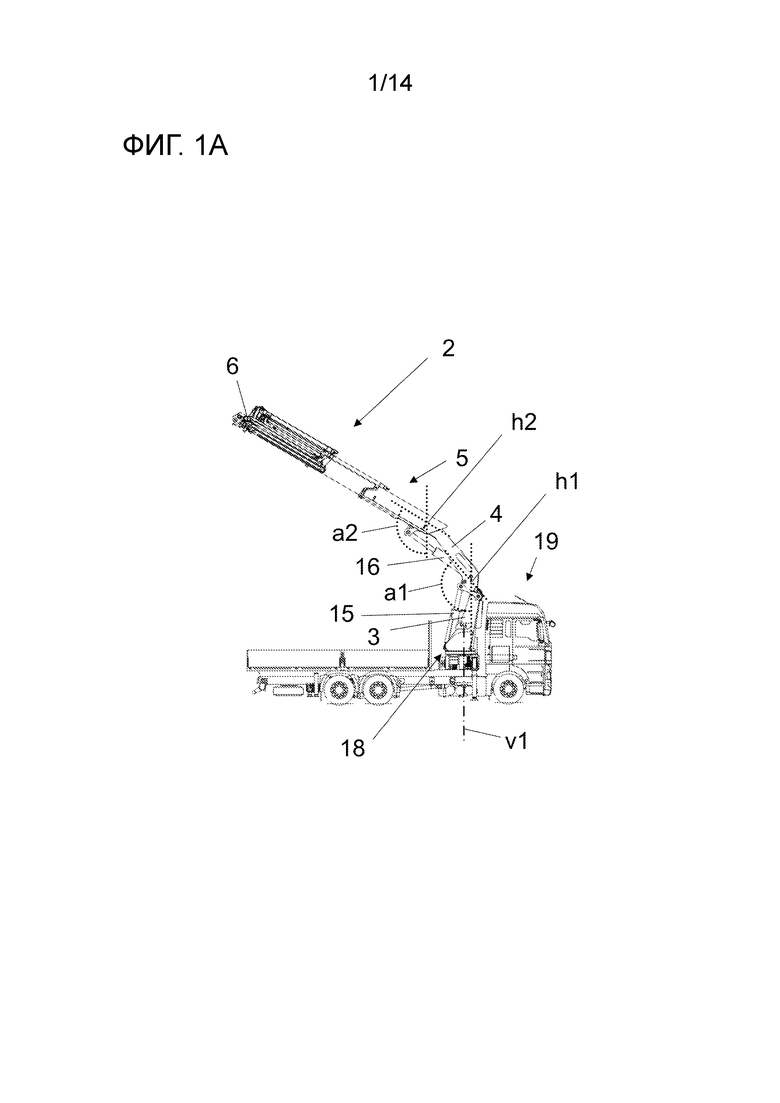
На фиг.1a показан первый вариант осуществления подъемного устройства 2, причем это подъемное устройство 2 выполнено в виде погрузочного крана или, соответственно, крана с шарнирно-сочлененной стрелой и расположено на транспортном средстве 19. Подъемное устройство 2 имеет, как показано, вращающуюся вокруг первой вертикальной оси v1 посредством механизма 18 вращения крановую мачту 3, опертую с возможностью поворота вокруг первой горизонтальной оси h1 поворота на крановую мачту 3 главную стрелу 4 и опертую с возможностью поворота вокруг второй горизонтальной оси h2 поворота на главную стрелу 4 шарнирно-сочлененную стрелу 5, имеющую по меньшей мере одну крановую выдвижную стрелу 6. Для поворота главной стрелы 4 относительно крановой мачты 3 (угол изгиба a1) предусмотрен первый гидравлический главный цилиндр 15. Для поворота шарнирно-сочлененной стрелы 5 относительно главной стрелы 4 (угол изгиба a2) предусмотрен гидравлический шарнирно-сочлененный цилиндр 16.
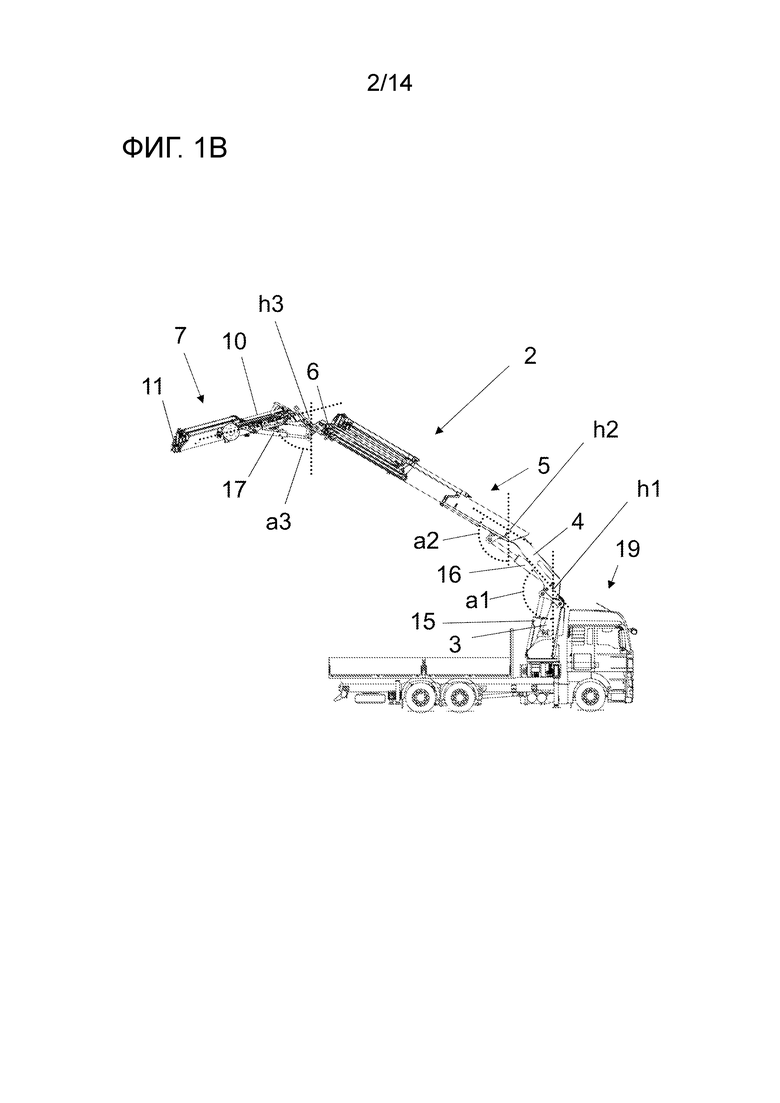
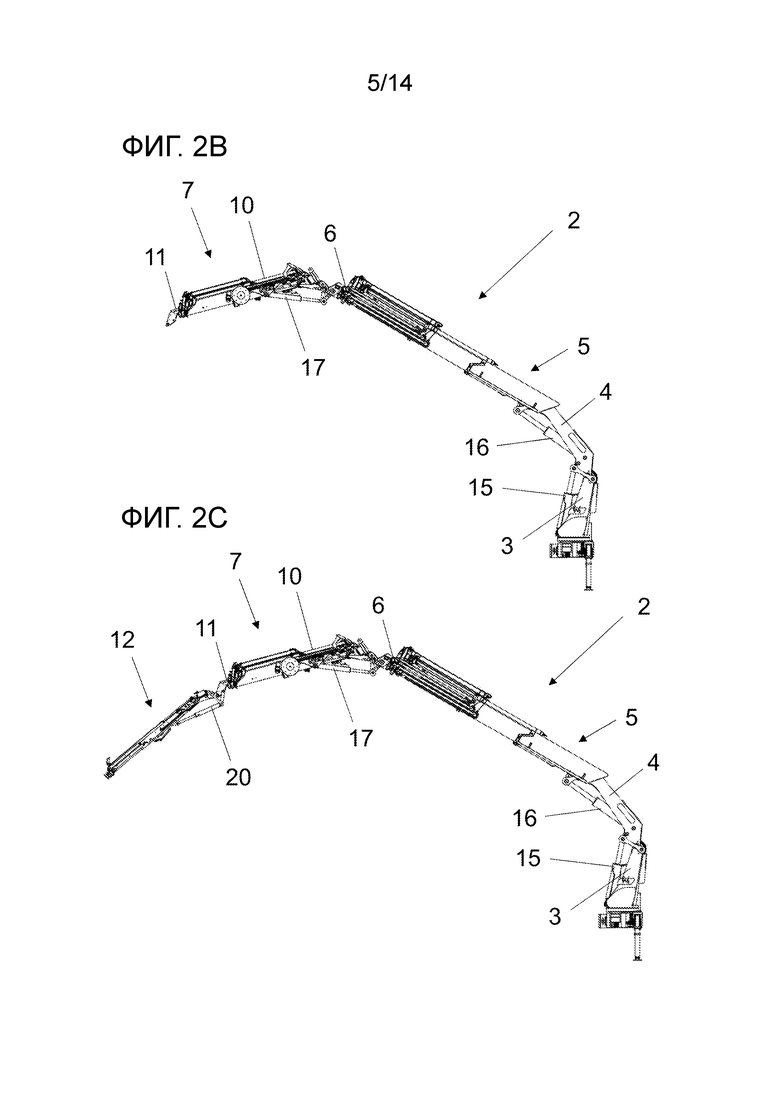
На фиг.1b показан второй вариант осуществления подъемного устройства 2, при этом показанное на ней подъемное устройство 2 дополнительно к оснащению варианта осуществления, показанного на фиг.1a, имеет установленную с возможностью поворота вокруг третьей горизонтальной оси h3 поворота на крановой выдвижной стреле 6 шарнирно-сочлененной стрелы 5 приставную шарнирно-сочлененную стрелу 7, имеющую крановую стрелу 10 и другую крановую выдвижную стрелу 11. Для поворота приставной шарнирно-сочлененной стрелы 7 относительно шарнирно-сочлененной стрелы 5 (угол изгиба a3) предусмотрен шарнирно-сочлененный цилиндр 17.
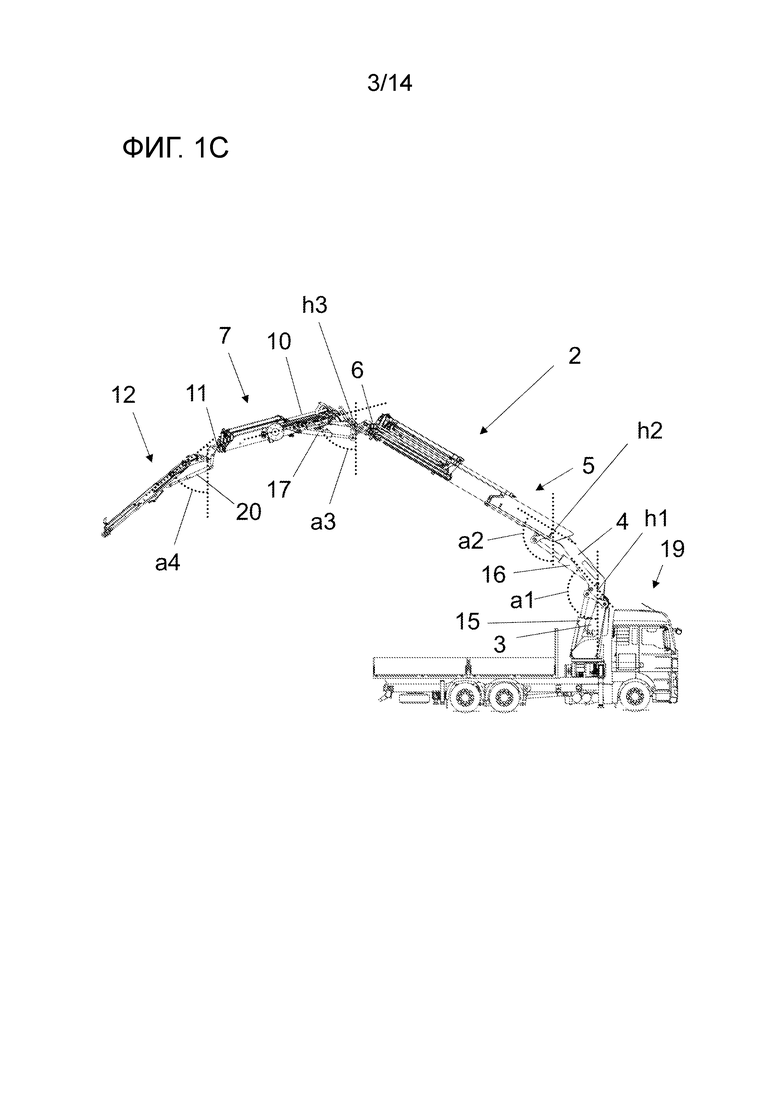
На фиг.1c показан третий вариант осуществления подъемного устройства 2, при этом показанное на ней подъемное устройство 2 дополнительно к конфигурации варианта осуществления, показанного на фиг.1b, имеет другую, установленную с возможностью поворота вокруг четвертой горизонтальной оси h4 поворота на крановой выдвижной стреле 11 приставной шарнирно-сочлененной стрелы 7 приставную шарнирно-сочлененную стрелу 12. Для поворота этой другой приставной шарнирно-сочлененной стрелы 12 относительно приставной шарнирно-сочлененной стрелы 7 (угол изгиба a4) предусмотрен шарнирно-сочлененный цилиндр 20.
Все показанные варианты осуществления могут, разумеется, иметь механизм 18 вращения.
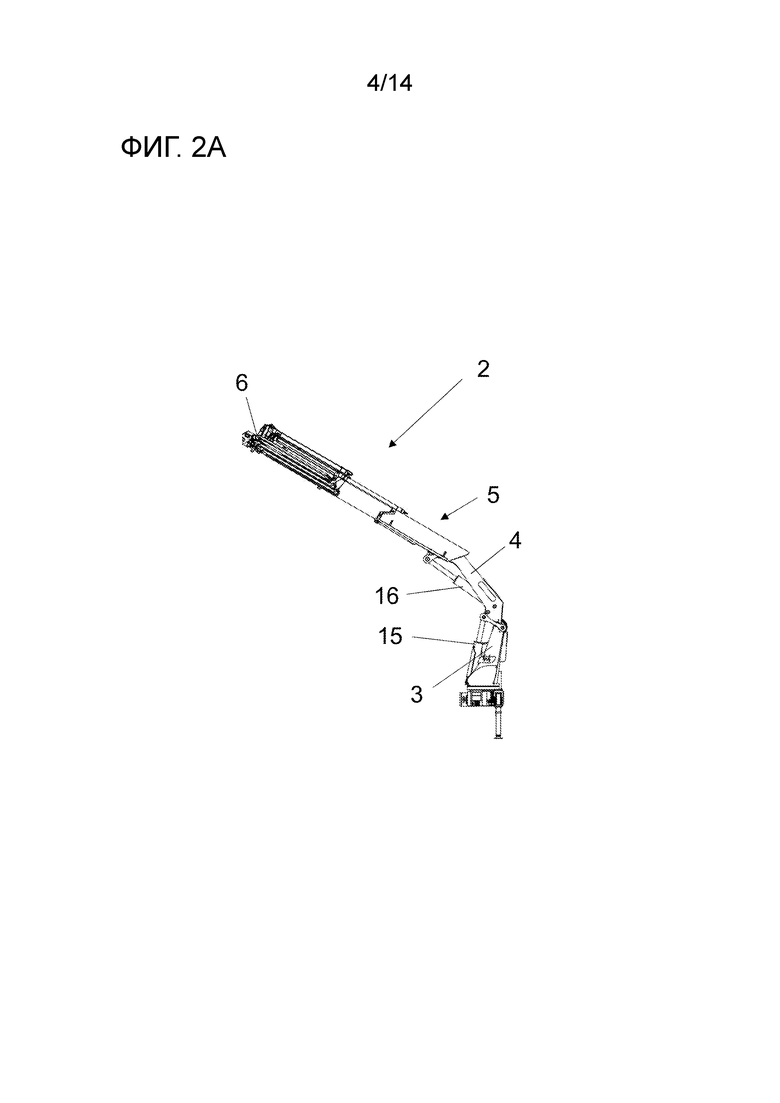
На каждой из фиг.2a-2c показан местный вид одного из подъемных устройств 2, выполненных в соответствии с фиг.1a-1c.
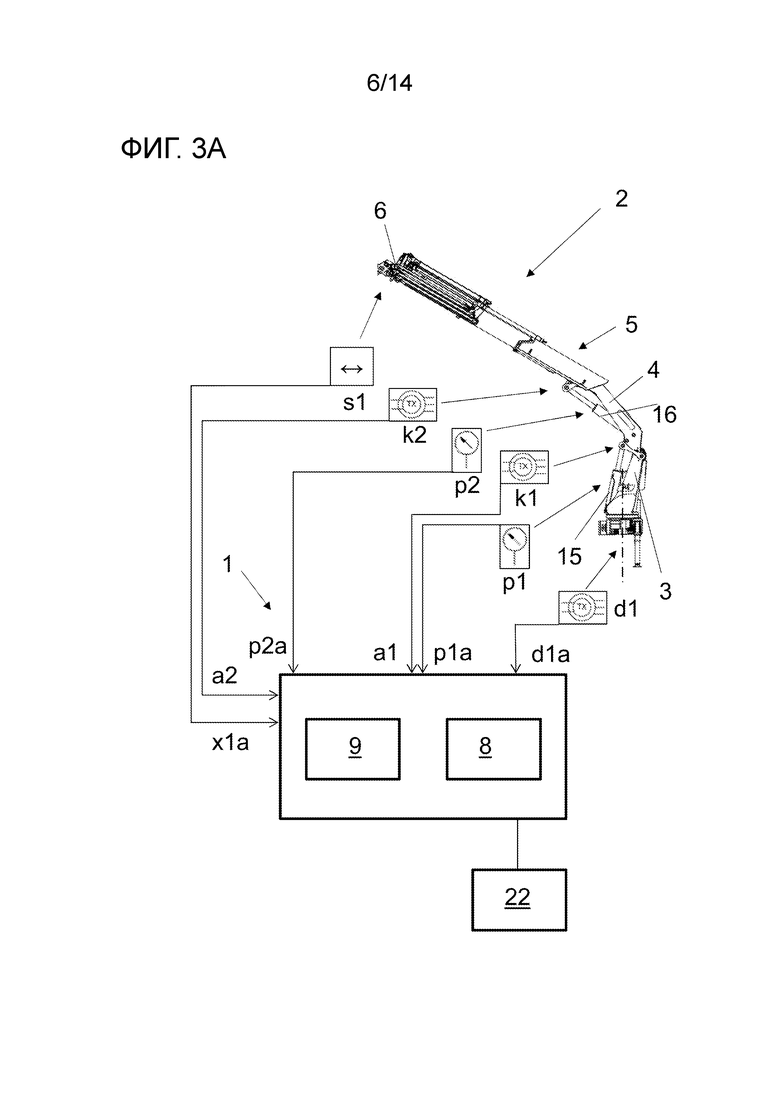
На фиг.3a показан один из вариантов осуществления подъемного устройства 2 в соответствии с фиг.1a или, соответственно, 2a. Кроме того, показано схематичное изображение блока 1 управления, который выполнен для осуществления способа определения поднятой или поднимаемой подъемным устройством 2 нагрузки 21 (здесь не изображено, см. об этом, например, фиг.4, 5 или 6). Блок 1 управления располагает несколькими сигнальными входами, к которым могут подводиться сигналы сенсорики, смонтированной на подъемном устройстве 2. Также блок 1 управления располагает памятью 9, в которой могут быть сохранены, например, программные данные для рабочих режимов и расчетные модели блока 1 управления, а также входящие сигналы, и вычислительным устройством 8, с помощью которого могут обрабатываться входящие сигналы и архивированные в памяти 9 данные. Блок 1 управления может также поддерживать связь с дисплеем 22. Поддержание связи блока 1 управления с дисплеем 22 может осуществляться проводным и/или беспроводным путем. Сенсорика для регистрации геометрии подъемного устройства 2 включает в себя в показанном на фиг.3a варианте осуществления сенсор d1 угла вращения для регистрации соответствующего угла d1a вращения, сенсор k1 угла изгиба для регистрации угла a1 изгиба главной стрелы 4 относительно крановой мачты 3, сенсор k2 угла изгиба для регистрации угла a2 изгиба шарнирно-сочлененной стрелы 5 относительно главной стрелы 4, а также сенсор s1 выдвинутого положения для регистрации выдвинутого положения крановой выдвижной стрелы 6. Для регистрации сил, действующих на подъемное устройство 2, предусмотрен сенсор p1 давления для регистрации гидравлического давления p1a в главном цилиндре 15 и сенсор p2 давления для регистрации гидравлического давления p2a в шарнирно-сочлененном цилиндре 16.
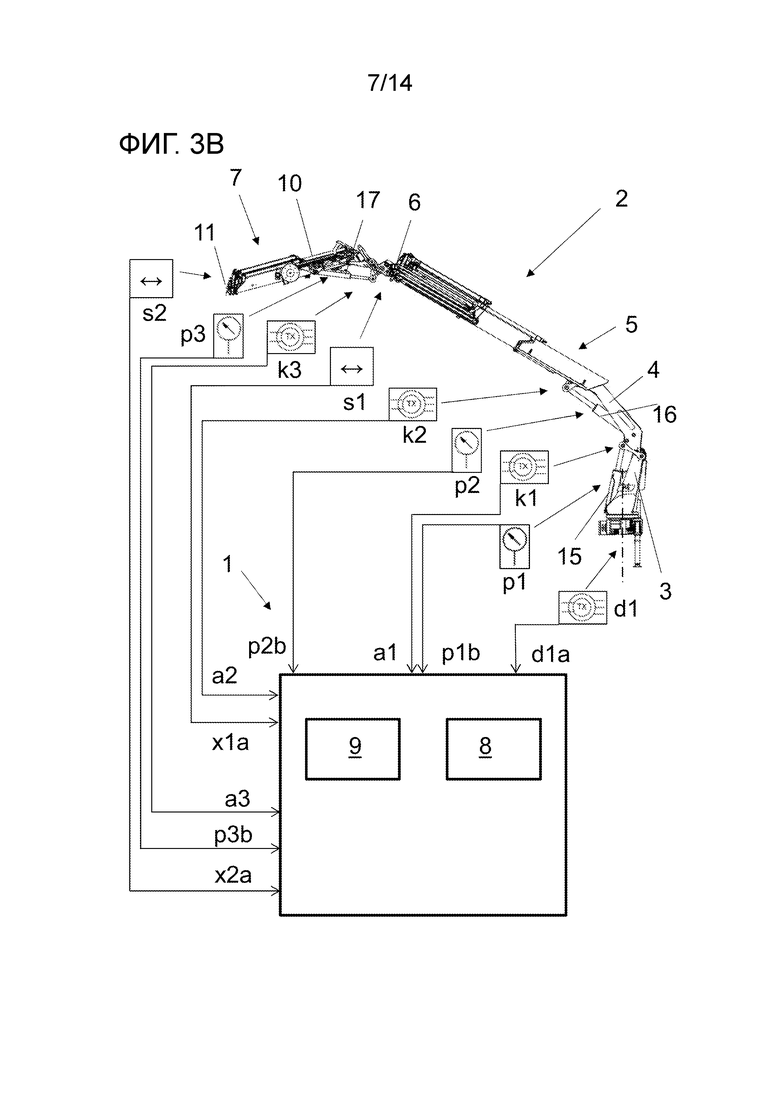
На фиг.3b, аналогично фиг.3a, показан один из вариантов осуществления подъемного устройства 2 в соответствии с фиг.1b или, соответственно, 2b. Конфигурация подъемного устройства 2 включает в себя, как показано, установленную на крановой выдвижной стреле 6 шарнирно-сочлененной стрелы 5 приставную шарнирно-сочлененную стрелу 7. В качестве дополнительной сенсорики для регистрации характеристических для нагруженного состояния подъемного устройства 2 параметров предусмотрен сенсор k3 угла изгиба для регистрации угла a3 изгиба приставной шарнирно-сочлененной стрелы 7 относительно шарнирно-сочлененной стрелы 5, сенсор s2 выдвинутого положения для регистрации выдвинутого положения другой крановой выдвижной стрелы 11 и сенсор p3 давления для регистрации гидравлического давления p3b в шарнирно-сочлененном цилиндре 17.
Возможен также аналогичный вариант осуществления показанной на фиг.3a и 3b системы из подъемного устройства 2 в соответствии с фиг.1c или, соответственно, 2c и блока 1 управления.
Однако при способе определения поднятой или понимаемой подъемным устройством 2 нагрузки 21, который описан выше, эта дополнительная по сравнению с фиг.3a сенсорика при исполнении подъемного устройства 2 с приставной шарнирно-сочлененной стрелой 7 не является обязательно необходимой, так как (при известном смещении приставной шарнирно-сочлененной стрелы 7), в принципе, поднятая или поднимаемая нагрузка 21 может определяться при определении момента относительно горизонтальной оси h1 поворота. Однако эта дополнительная сенсорика и учет даваемых ею результатов измерения или, соответственно, параметров, в частности возможное с ее помощью дополнительное определение момента относительно третьей горизонтальной оси h3 поворота, может способствовать повышенной точности определения (точности измерения).
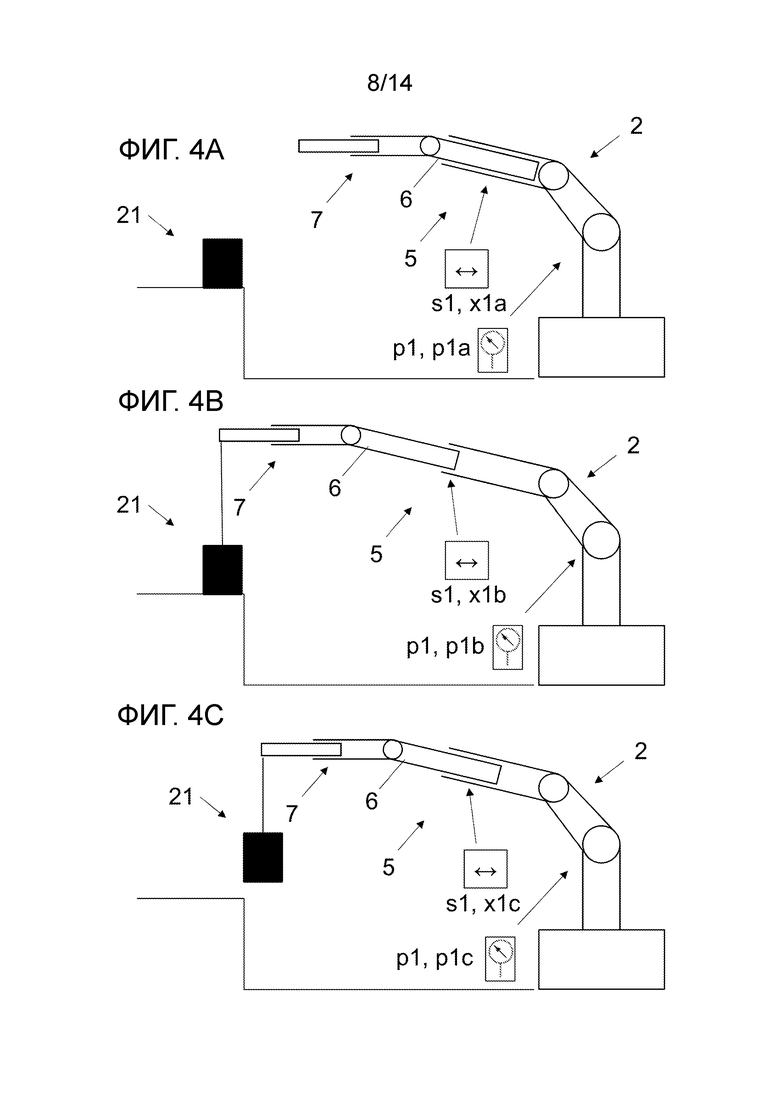
На фиг.4a-4c показан ход процесса захвата нагрузки (или, соответственно, в обратной последовательности, ход снятия нагрузки) подъемным устройством 2. При этом показанное на фиг.4a положение подъемного устройства 2 может соответствовать контрольному положению, при этом контрольным положением может служить по существу свободно выбираемое положение подъемного устройства 2. Из характеристических для нагруженного состояния подъемного устройства 2 параметров в изображенном процессе захвата нагрузки рассматриваются только измеренное сенсором s1 выдвинутого положения выдвинутое положение шарнирно-сочлененной стрелы 5 и измеренное сенсором p1 давления гидравлическое давление в главном цилиндре 15. В контрольном положении измеряются первое выдвинутое положение x1a крановой выдвижной стрелы 6 и первое гидравлическое давление p1a и архивируются в памяти 8 управления 1 (не изображено). Для этого блок 1 управления имеет первый рабочий режим для первой регистрации мгновенно действующих на подъемное устройство 2 сил и мгновенной геометрии подъемного устройства 2.
Из контрольного положения подъемное устройство путем изменения геометрии, здесь путем выдвижения крановой выдвижной стрелы 6 шарнирно-сочлененной стрелы 5, приводится теперь во второе выдвинутое положение x1b, в промежуточное положение. Это промежуточное положение пригодно, как изображено, для захвата нагрузки 21. В принципе, разумеется, возможно также, чтобы показанное на фиг.4b положение подъемного устройства 2 (перед подъемом нагрузки 21) служило контрольным положением. В промежуточном положении измеряется второе выдвинутое положение x1b крановой выдвижной стрелы 6 и второе гидравлическое давление p1b и тоже архивируется в памяти 8 блока 1 управления (не изображено). Это может осуществляться вообще для всех процессов подъема на промежуточной фазе, на которой блок 1 управления находится в подходящем для этого рабочем режиме. В промежуточном положении теперь нагрузка 21 навешивается на подъемное устройство 2 и в данном случае также поднимается. В принципе, уже сейчас может осуществляться определение поднятой нагрузки 21.
Из промежуточного положения подъемное устройство 2 путем изменения геометрии, здесь после подъема нагрузки 21, путем втягивания крановой выдвижной стрелы 6 приводится в третье выдвинутое положение x1c, в положение измерения. Положение измерения, как показано, приближено к контрольному положению. При этом может быть предусмотрено, чтобы изменение положения или, соответственно, геометрии подъемного устройства 2 обязательно лежало в поле допусков, чтобы можно было использовать зарегистрированные на контрольной фазе характеристические параметры для мгновенно действующих на подъемное устройство 2 сил и мгновенной геометрии подъемного устройства 2 для определения поднятой нагрузки 21. При этом поле допусков может относиться к максимально допустимому изменению выдвинутого положения и/или максимально допустимому изменению угла изгиба (см., например, фиг.7a и 7b).
На фиг.4c подъемное устройство 2 после подъема нагрузки 21 находится в положении измерения. В положении измерения теперь измеряются третье выдвинутое положение x1c крановой выдвижной стрелы 6 и третье гидравлическое давление p1c и архивируются в памяти 8 блока 1 управления (не изображено). Для этого блок 1 управления имеет второй рабочий режим для второй регистрации мгновенно действующих на подъемное устройство 2 сил и мгновенной геометрии подъемного устройства 2.
На фазе сравнения, на которой блок 1 управление находится в третьем рабочем режиме, теперь осуществляется характеристика поднятой нагрузки 21 путем сравнения соответствующих зарегистрированных мгновенно действующих на подъемное устройство 2 сил и соответствующей зарегистрированной мгновенной геометрии подъемного устройства 2. Регистрация мгновенно действующих на подъемное устройство 2 сил и соответствующей зарегистрированной мгновенной геометрии подъемного устройства осуществляется вообще предпочтительно в каждом случае с использованием характеристических для каждого положения подъемного устройства 2 и каждого нагруженного состояния подъемного устройства 2 параметров (например, давлений, выдвинутых положений, углов изгиба и возможных дополнительных данных конфигурации) и заложенной в памяти 8 блока 1 управления расчетной модели.
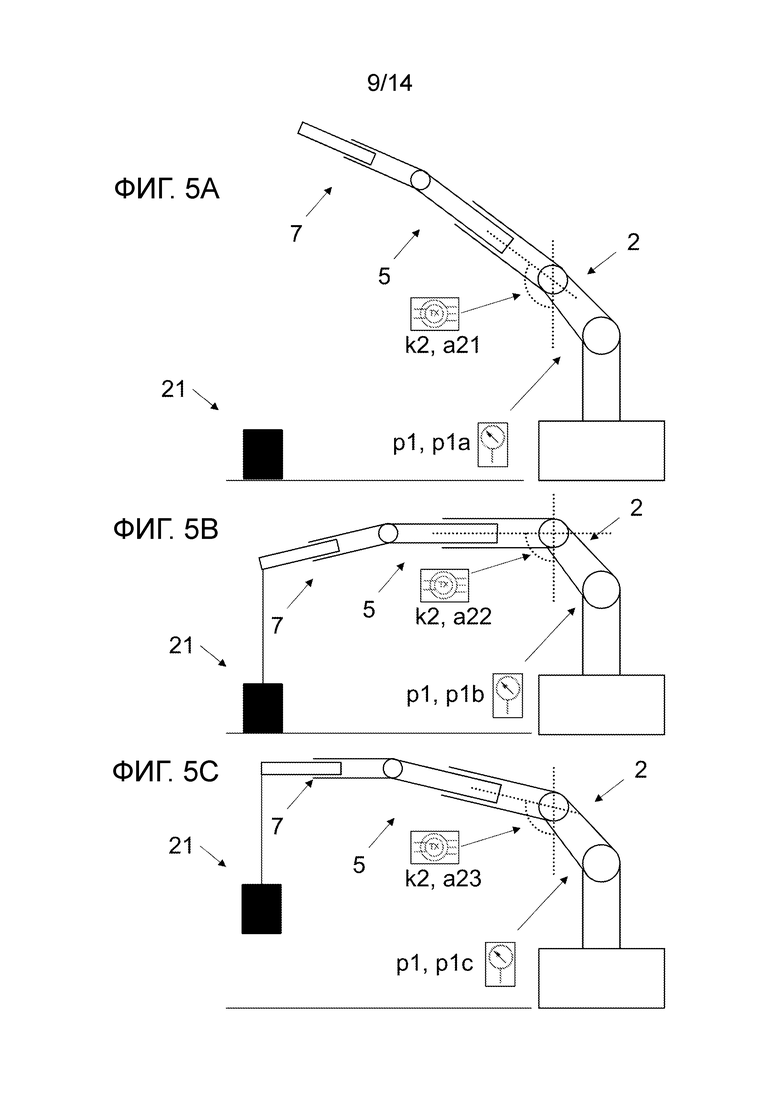
На фиг.5a-5c показан дальнейший ход захвата нагрузки (или, соответственно, в обратной последовательности, ход снятия нагрузки) подъемным устройством 2. Захват нагрузки 21 подъемным устройством 2 осуществляется, как изображено, путем поворота шарнирно-сочлененной стрелы 5 относительно главной стрелы 4. Из характеристических для нагруженного состояния подъемного устройства 2 параметров в изображенном процессе захвата нагрузки рассматриваются только измеренный сенсором k2 угла изгиба угол изгиба шарнирно-сочлененной стрелы 5 и измеренное сенсором p1 давления гидравлическое давление в главном цилиндре 15.
В показанном на фиг.5a контрольном положении измеряются первое положение a21 угла изгиба шарнирно-сочлененной стрелы 5 и первое гидравлическое давление p1a и архивируются в памяти 8 блока 1 управления (не изображено) (контрольная фаза, блок 1 управления в первом рабочем режиме). Путем изменения геометрии, здесь поворота шарнирно-сочлененной стрелы 5, подъемное устройство 2 приводится в показанное на фиг.5b промежуточное положение. В промежуточном положении измеряется второе положение a22 угла изгиба шарнирно-сочлененной стрелы 5 и второе гидравлическое давление p1b и тоже архивируется в памяти 8 блока 1 управления (не изображено). Как и ранее, и здесь показанное на фиг.5b положение подъемного устройства 2 может служить контрольным положением. Путем дальнейшего изменения геометрии, здесь снова поворота шарнирно-сочлененной стрелы 5, подъемное устройство 2 приводится в показанное на фиг.5c положение измерения, при этом также осуществляется подъем нагрузки 21. В положении измерения теперь измеряются третье положение a23 угла изгиба шарнирно-сочлененной стрелы 5 и третье гидравлическое давление p1c и архивируются в памяти 8 блока 1 управления (не изображено) (фаза измерения, блок 1 управления во втором рабочем режиме). На последующей фазе сравнения (блок 1 управления в третьем рабочем режиме) блоком 1 управления может, в свою очередь, характеризоваться поднятая нагрузка 21.
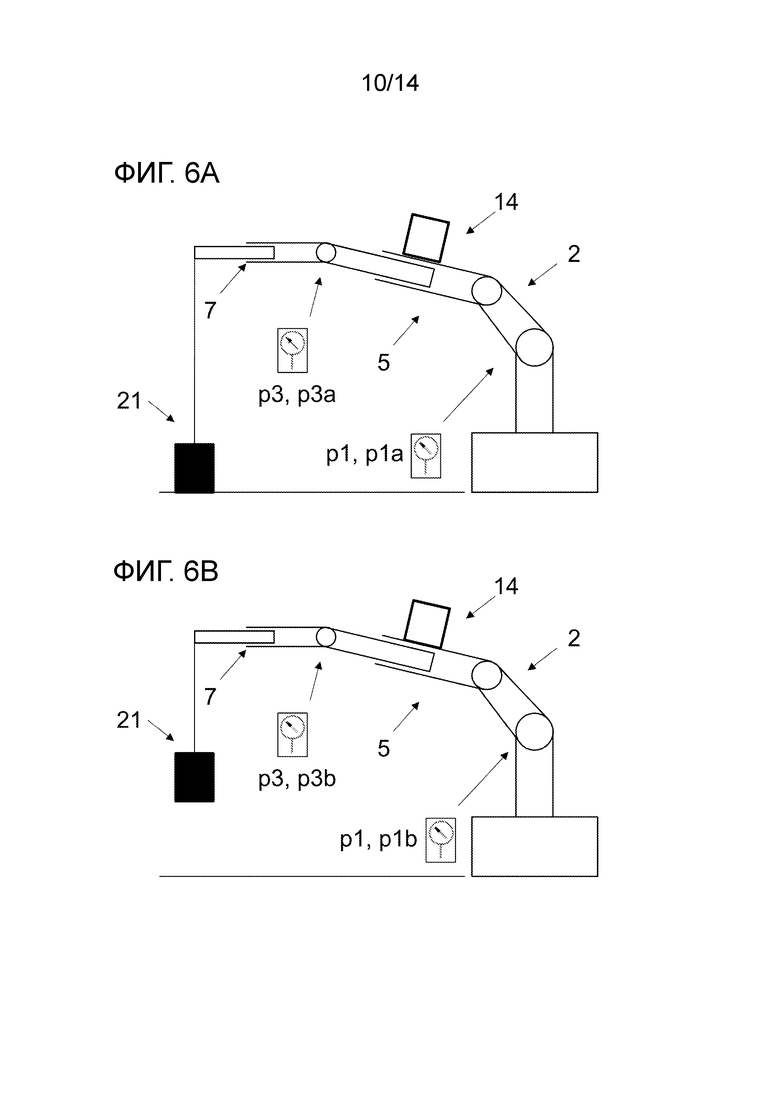
На фиг.6a и 6b показан дальнейший ход захвата нагрузки (или, соответственно, в обратной последовательности ход снятия нагрузки) подъемным устройством 2, причем это подъемное устройство имеет установленное на шарнирно-сочлененной стреле 5 дополнительное рабочее оборудование 14 в виде канатной лебедки. Захват нагрузки 21 подъемным устройством 2 осуществляется посредством рабочего оборудования 14 в виде канатной лебедки. Из характеристических для нагруженного состояния подъемного устройства 2 параметров в изображенном процессе захвата нагрузки рассматриваются только измеренное сенсором p1 давления гидравлическое давление в главном цилиндре 15 и измеренное сенсором p3 давления гидравлическое давление в шарнирно-сочлененном цилиндре 17. На фиг.6a подъемное устройство 2 находится в контрольном положении, которое уже пригодно для захвата нагрузки. На фиг.6b подъемное устройство 2 после осуществленного захвата нагрузки находится в положении измерения, причем это положение в изображенном случае по существу соответствует контрольному положению. Путем сравнения записанных на контрольной фазе давлений p1a, p3a и записанных на фазе измерения p1b, p3b (при достаточно определенной геометрии) может делаться заключение об изменении нагрузки подъемного устройства 2 и так характеризоваться поднятая нагрузка 21.
В принципе, с помощью вышеописанного способа возможно определение поднятой или поднимаемой нагрузки подъемным устройством 2 в любой комбинации изменений геометрии, в частности в любой комбинации изменений геометрии, показанных на рассмотренных фигурах.
На фиг.4, 5 и 6 в каждом случае подразумевается, что для показанных положений подъемного устройства 2 в каждом случае осуществляется регистрация мгновенной геометрии, то есть, в частности, регистрация релевантных для мгновенной геометрии характеристических параметров (например, угол вращения, угол изгиба и выдвинутые положения). В вариантах осуществления подъемного устройства 2, имеющего приставную шарнирно-сочлененную стрелу 7 (часто называемую плечом крана) для определения поднятой или поднимаемой нагрузки 21 могут также использоваться зарегистрированные для этой приставной шарнирно-сочлененной стрелы 7 характеристические параметры.
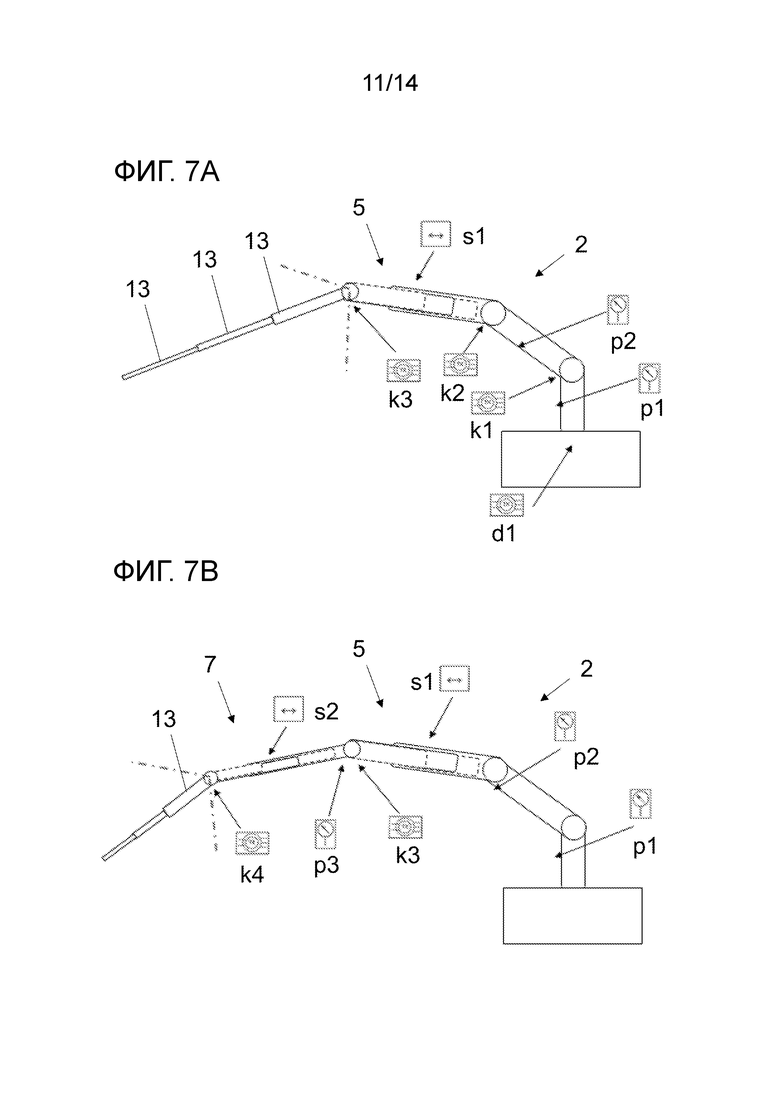
На фиг.7a и 7b показан в каждом случае один из схематичных вариантов осуществления подъемного устройства 2, имеющего установленные на нем, приводимые в действие вручную, статические удлинения 13 стрелы.
В показанном на фиг.7a варианте осуществления удлинения 13 стрелы установлены на шарнирно-сочлененной стреле 5. Удлинения 13 стрелы могут быть при этом установлены на шарнирно-сочлененной стреле 5 с возможностью поворота, при этом угол изгиба удлинений 13 стрелы может регистрироваться посредством сенсора k3 угла изгиба. Информация о дополнительном смещении удлинений 13 стрелы может быть заложена в памяти 8 блока 1 управления и одновременно использоваться для определения поднимаемой или поднятой нагрузки 21. На фиг.7a, кроме того, штриховыми линиями обозначено в каждом случае поле допусков для изменения выдвинутого положения шарнирно-сочлененной стрелы 5, а также изображено изменение угла изгиба удлинений 13 стрелы.
В показанном на фиг.7b варианте осуществления удлинения 13 стрелы установлены на приставной шарнирно-сочлененной стреле 7, установленной на шарнирно-сочлененной стреле 5. Причем эти удлинения 13 стрелы могут быть установлены на приставной шарнирно-сочлененной стреле 7 с возможностью поворота, при этом угол изгиба удлинений 13 стрелы может регистрироваться посредством сенсора k4 угла изгиба. На фиг.7b тоже штриховыми линиями обозначено в каждом случае поле допусков для изменения выдвинутого положения шарнирно-сочлененной стрелы 5, приставной шарнирно-сочлененной стрелы 7, а также изменения угла изгиба удлинений 13 стрелы.
В одном из особенно предпочтительных вариантов осуществления подъемного устройства 2 поле допусков может включать в себя по существу всю область движения подъемного устройства 2.
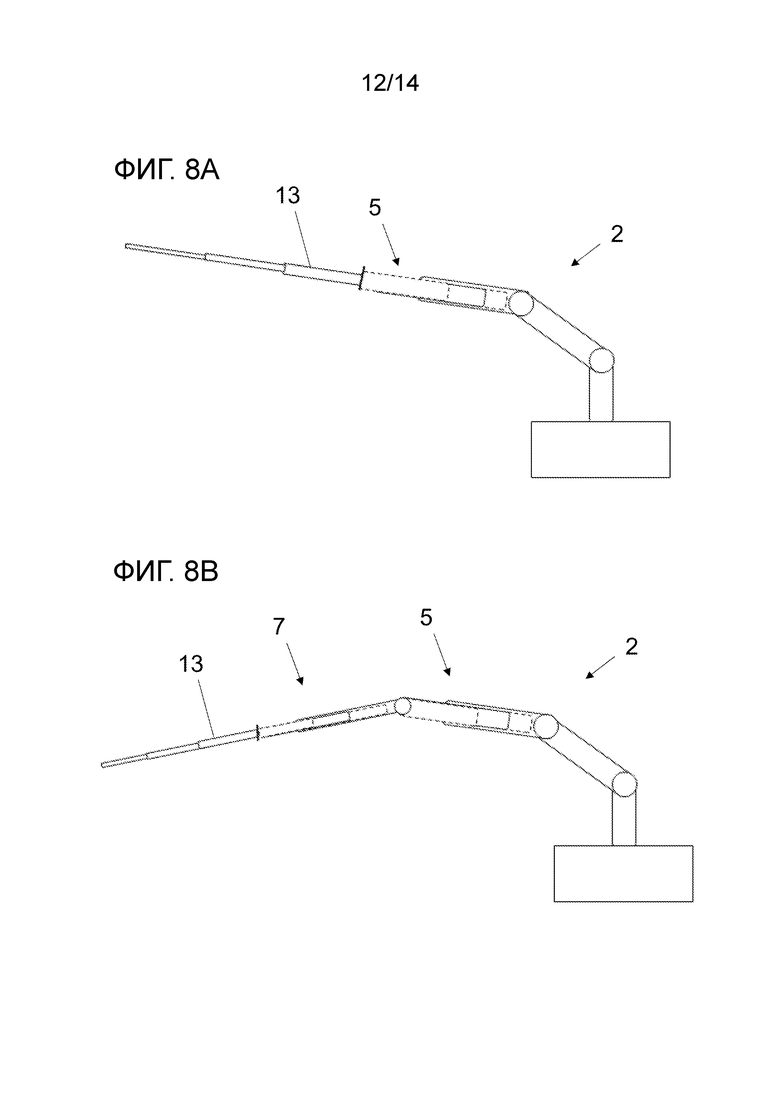
На фиг.8a и 8b показан вариант осуществления подъемного устройства 2, аналогичный фиг.7a и 7b, при этом, однако, удлинения 13 стрелы установлены на шарнирно-сочлененной стреле 5 или, соответственно, на приставной шарнирно-сочлененной стреле 7 под заданным, не изменяющимся углом изгиба.
На каждой из фиг.9a и 9b показан один из вариантов осуществления подъемного устройства 2, имеющего установленное на нем рабочее оборудование 14, например, в виде грейфера. На фиг.9a рабочее оборудование 14 установлено на шарнирно-сочлененной стреле 5, а на фиг.9b рабочее оборудование 14 установлено на приставной шарнирно-сочлененной стреле 7. В данном случае может регистрироваться угловое положение рабочего оборудования 14 относительно несущей его крановой стрелы и одновременно учитываться при определении поднятой нагрузки 21. Так как в вышеописанном способе на контрольной фазе, а также на фазе измерения регистрируется обусловленная рабочим оборудованием 14 нагрузка подъемного устройства 2, она может использоваться в расчетной модели.
На каждой из фиг.10a и 10a показан один из вариантов осуществления подъемного устройства 2, имеющего установленное на нем рабочее оборудование 14, здесь в виде канатной лебедки, и поднятая подъемным устройством 2 нагрузка 21. На фиг. 10a рабочее оборудование 14 установлено на шарнирно-сочлененной стреле 5, а на фиг.10b рабочее оборудование 14 установлено на главной стреле 4. Так как в вышеописанном способе на контрольной фазе, а также на фазе измерения регистрируется обусловленная рабочим оборудованием 14 нагрузка подъемного устройства 2, по существу независимо от его положения на подъемном устройстве 2, она может использоваться в расчетной модели.
Таким образом, функциональность определения поднятой или поднимаемой подъемным устройством 2 нагрузки 21 не лимитирована оснащением или, соответственно, конфигурацией подъемного устройства 2.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 Блок управления
2 Подъемное устройство
3 Крановая мачта
4 Главная стрела
a1, a2, a3, a4 Угол изгиба
5 Шарнирно-сочлененная стрела
6 Крановая выдвижная стрела
7 Приставная шарнирно-сочлененная стрела
s1, s2 Сенсор выдвинутого положения
x1a, x2b, x3c Выдвинутые положения
p1, p2, p3 Сенсоры давления
p1a, p1b, p1c Давления
p3a, p3b Давления
8 Память
9 Вычислительное устройство
k1, k2, k3, k4 Сенсор угла изгиба
d1 Сенсор угла вращения
a21, a22, a23 Угол изгиба
d1a Угол вращения
10 Крановая стрела
11 Крановая выдвижная стрела
12 Приставная шарнирно-сочлененная стрела
13 Удлинение стрелы
14 Рабочее оборудование
15 Главный цилиндр
16, 17, 20 Шарнирно-сочлененный цилиндр
18 Механизм вращения
19 Транспортное средство
22 Дисплей
h1, h2, h3 Горизонтальная ось поворота
v1 Вертикальная ось поворота
21 Нагрузка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран | 2018 |
|
RU2683918C1 |
| СПОСОБ УПРАВЛЕНИЯ И/ИЛИ РЕГУЛИРОВАНИЯ СВЯЗАННОГО С ТРАНСПОРТНЫМ СРЕДСТВОМ ПОДЪЕМНОГО УСТРОЙСТВА | 2022 |
|
RU2819298C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И ГРУЗОВОЙ КРАН С УСТРОЙСТВОМ УПРАВЛЕНИЯ | 2018 |
|
RU2737639C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2019 |
|
RU2737758C1 |
| КРАНОВЫЙ КОНТРОЛЛЕР | 2015 |
|
RU2641395C1 |
| КРАН С КРАНОВЫМ КОНТРОЛЛЕРОМ | 2020 |
|
RU2772140C1 |
| ПОДЪЕМНЫЙ КРАН (ВАРИАНТЫ) И СПОСОБ ЕГО НАЛАДКИ | 2010 |
|
RU2542831C2 |
| ПЕРЕДВИЖНОЙ ТЕЛЕСКОПИЧЕСКИЙ ПОДЪЕМНЫЙ КРАН | 2011 |
|
RU2548652C2 |
| ГРУЗОПОДЪЕМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 1999 |
|
RU2169694C2 |
| ГРУЗОПОДЪЁМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2240973C2 |
Предложен способ определения нагрузки поднятой или поднимаемой гидравлическим погрузочным краном. Подъемное устройство для определения поднятой или поднимаемой нагрузки на контрольной фазе в первом нагруженном состоянии подъемного устройства приводят в контрольное положение. В контрольном положении осуществляют первую регистрацию мгновенно действующих на подъемное устройство сил и мгновенной геометрии подъемного устройства, при этом контрольное положение соответствует свободно выбираемому положению подъемного устройства. На фазе измерения подъемное устройство во втором нагруженном состоянии приводят в положение измерения, и в этом положении измерения осуществляют вторую регистрацию мгновенно действующих на подъемное устройство сил и мгновенной геометрии подъемного устройства. На фазе сравнения путем сравнения соответствующих зарегистрированных мгновенно действующих на подъемное устройство сил и соответствующей зарегистрированной мгновенной геометрии подъемного устройства характеризуют поднятую нагрузку. Предложен также блок управления для гидравлического подъемного устройства. Достигается определение нагрузки, поднятой или поднимаемой гидравлическим подъемным устройством. 3 н. и 21 з.п. ф-лы, 14 ил.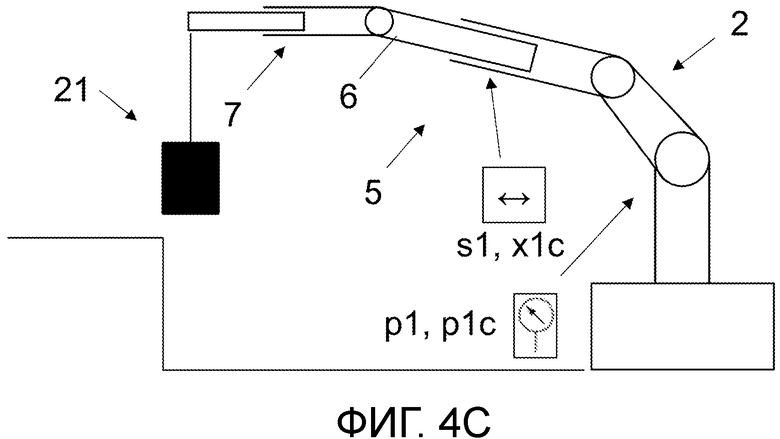
1. Способ определения нагрузки (21), поднятой или поднимаемой гидравлическим подъемным устройством (2), предпочтительно гидравлическим погрузочным краном, причем это подъемное устройство (2) для определения поднятой или поднимаемой нагрузки (21) на контрольной фазе в первом нагруженном состоянии подъемного устройства (2) приводят в контрольное положение, отличающийся тем, что:
- в контрольном положении осуществляют первую регистрацию мгновенно действующих на подъемное устройство (2) сил и мгновенной геометрии подъемного устройства (2), при этом контрольное положение соответствует свободно выбираемому положению подъемного устройства (2),
- на фазе измерения подъемное устройство (2) во втором нагруженном состоянии приводят в положение измерения и в этом положении измерения осуществляют вторую регистрацию мгновенно действующих на подъемное устройство (2) сил и мгновенной геометрии подъемного устройства (2), и
- на фазе сравнения путем сравнения соответствующих зарегистрированных мгновенно действующих на подъемное устройство (2) сил и соответствующей зарегистрированной мгновенной геометрии подъемного устройства характеризуют поднятую нагрузку (21).
2. Способ по п. 1, при этом положение измерения соответствует положению подъемного устройства (2) после захвата нагрузки или снятия нагрузки.
3. Способ по п. 1 или 2, при этом положение измерения соответствует положению подъемного устройства (2), приближенному к контрольному положению подъемного устройства (2).
4. Способ по одному из предыдущих пунктов, при этом положение измерения подъемного устройства (2) по существу соответствует контрольному положению.
5. Способ по одному из предыдущих пунктов, при этом контрольное положение соответствует положению, приближенному к промежуточному положению, причем это промежуточное положение является положением подъемного устройства (2), пригодным для захвата нагрузки или снятия нагрузки.
6. Способ по п. 5, при этом перевод подъемного устройства (2) из контрольного положения в промежуточное положение и перевод подъемного устройства (2) из промежуточного положения в положение измерения осуществляют при изменении положения подъемного устройства (2), лежащего в некотором поле допусков.
7. Способ по одному из предыдущих пунктов, при этом перед каждым выполнением фазы измерения для регистрации сил, мгновенно действующих во втором нагруженном состоянии на подъемное устройство (2), и мгновенной геометрии подъемного устройства (2) осуществляют выполнение контрольной фазы для регистрации сил, мгновенно действующих в первом нагруженном состоянии на подъемное устройство (2), и мгновенной геометрии подъемного устройства.
8. Способ по одному из предыдущих пунктов, при этом регистрация сил, мгновенно действующих на подъемное устройство (2), и мгновенной геометрии подъемного устройства (2) осуществляют с использованием характеристических для каждого положения подъемного устройства (2) и каждого нагруженного состояния подъемного устройства (2) параметров и расчетной модели.
9. Способ по одному из предыдущих пунктов, при этом подъемное устройство (2) имеет по меньшей мере одну вращающуюся вокруг вертикальной оси (v1) вращения крановую мачту и опертую на крановую мачту (3) с возможностью поворота вокруг первой горизонтальной оси (h1) поворота главную стрелу (4), причем это подъемное устройство (2) имеет также по меньшей мере один гидравлический главный цилиндр (15) для поворота главной стрелы (4), при этом на контрольной фазе и фазе измерения регистрируют момент относительно первой горизонтальной оси (h1) поворота.
10. Способ по п. 9, при этом подъемное устройство (2) имеет механизм (18) вращения для вращения крановой мачты (3) и опертую на главную стрелу (4) с возможностью поворота вокруг второй горизонтальной оси (h2) вращения шарнирно-сочлененную стрелу (5), имеющую предпочтительно по меньшей мере одну крановую выдвижную стрелу (6), при этом подъемное устройство (2) имеет также первый гидравлический шарнирно-сочлененный цилиндр (16) для поворота шарнирно-сочлененной стрелы (5) и предпочтительно по меньшей мере один первый гидравлический выдвижной цилиндр для приведения в действие указанной по меньшей мере одной крановой выдвижной стрелы (6).
11. Способ по п. 9 или 10, при этом характеристические параметры включают в себя по меньшей мере давление в указанном по меньшей мере одном главном цилиндре (15), и/или давление в шарнирно-сочлененном цилиндре (16), и/или угол вращения механизма (18) вращения, и/или угол (a1) изгиба главной стрелы (4) относительно крановой мачты (3), и/или угол (a2) изгиба шарнирно-сочлененной стрелы (5) относительно главной стрелы (4), и/или выдвинутое положение указанной по меньшей мере одной крановой выдвижной стрелы (6).
12. Способ по одному из пп. 8-11, при этом подъемное устройство (2) имеет также опертую на шарнирно-сочлененную стрелу (5) с возможностью поворота вокруг третьей горизонтальной оси (h3) поворота приставную шарнирно-сочлененную стрелу (7), имеющую по меньшей мере одну крановую выдвижную стрелу (11), при этом подъемное устройство (2) имеет также по меньшей мере один второй гидравлический шарнирно-сочлененный цилиндр (17) для поворота приставной шарнирно-сочлененной стрелы (7), и характеристические параметры включают в себя также давление во втором шарнирно-сочлененном цилиндре (17) и/или угол (a3) изгиба приставной шарнирно-сочлененной стрелы (7) относительно шарнирно-сочлененной стрелы (5) и/или выдвинутое положение указанной по меньшей мере одной крановой выдвижной стрелы (11) приставной шарнирно-сочлененной стрелы (7), при этом на контрольной фазе и фазе измерения регистрируют момент относительно первой горизонтальной оси (h1) поворота и момент относительно третьей горизонтальной оси (h3) поворота.
13. Способ по одному из пп. 8-12, при этом подъемное устройство (2) имеет также по меньшей мере одно установленное предпочтительно под задаваемым углом на крановой выдвижной стреле (6, 11) удлинение (13) стрелы, и в расчетной модели используют дополнительное смещение указанного по меньшей мере одного удлинения (13) стрелы.
14. Способ по одному из пп. 8-13, при этом подъемное устройство (2) имеет также по меньшей мере одно, в частности расположенное на крановой выдвижной стреле (6, 11), рабочее оборудование (14), и в расчетной модели используют дополнительную обусловленную этим рабочим оборудованием нагрузку (14).
15. Способ по одному из пп. 8-14, при этом в расчетной модели используют деформацию подъемного устройства (2).
16. Способ по одному из пп. 9-15, при этом в расчетной модели используют деформацию крановой мачты (3), и/или главной стрелы (4), и/или шарнирно-сочлененной стрелы (5), и/или приставной шарнирно-сочлененной стрелы (7), и/или указанной по меньшей мере одной крановой выдвижной стрелы (6, 11) подъемного устройства (2), и/или указанного по меньшей мере одного удлинения (13) стрелы, и/или влияние трений в уплотнениях гидравлических цилиндров (15, 16, 17, 20).
17. Способ по п. 16, при этом в расчетной модели применяют деформацию в виде корректировки по зарегистрированному углу изгиба и/или в виде корректировки по зарегистрированным выдвинутым положениям, и/или влияние трений в уплотнениях в виде корректировки по зарегистрированным давлениям.
18. Способ по п. 17, при этом корректировку осуществляют в зависимости от зарегистрированных мгновенно действующих на подъемное устройство (2) сил, и/или зарегистрированного угла изгиба, и/или зарегистрированных выдвинутых положений.
19. Способ по п. 17 или 18, при этом корректировку для деформации осуществляют в линейной зависимости от зарегистрированного давления и/или в линейной зависимости от зарегистрированного выдвинутого положения и/или корректировку для трений в уплотнениях осуществляют обратно пропорционально зарегистрированному давлению и в зависимости от направления изменения положения.
20. Способ по одному из предыдущих пунктов, при этом первое нагруженное состояние соответствует нагруженному состоянию без поднятой подъемным устройством (2) нагрузки (21), а второе нагруженное состояние - нагруженному состоянию с поднятой нагрузкой (21).
21. Способ по одному из пп. 1-19, при этом первое нагруженное состояние соответствует нагруженному состоянию с первой поднятой подъемным устройством (2) нагрузкой (21), а второе нагруженное состояние - нагруженному состоянию со второй, предпочтительно отличающейся от первой, поднятой нагрузкой (21).
22. Блок (1) управления для гидравлического подъемного устройства (2), предпочтительно гидравлического грузоподъемного крана, который выполнен для осуществления способа по одному из предыдущих пунктов для определения поднятой или поднимаемой нагрузки, при этом блоком (1) управления
- в первом рабочем режиме выполняется контрольная фаза в первом нагруженном состоянии в контрольном положении подъемного устройства (2) для первой регистрации мгновенно действующих на подъемное устройство (2) сил и мгновенной геометрии подъемного устройства (2);
- во втором рабочем режиме выполняется фаза измерения во втором нагруженном состоянии в положении измерения подъемного устройства (2) для второй регистрации мгновенно действующих на подъемное устройство (2) сил и мгновенной геометрии подъемного устройства (2) и
- в третьем рабочем режиме выполняется фаза сравнения для характеристики поднятой нагрузки (21) путем сравнения соответствующих зарегистрированных мгновенно действующих на подъемное устройство (2) сил и соответствующей зарегистрированной мгновенной геометрии подъемного устройства (2).
23. Блок управления по п. 22, при этом характеризованная на фазе сравнения нагрузка (21) может отображаться в соответствующих этой нагрузке (21) единицах на дисплее, поддерживающем связь с блоком управления.
24. Гидравлическое подъемное устройство (2), предпочтительно погрузочный кран для транспортного средства (19), особенно предпочтительно кран с шарнирно-сочлененной стрелой, имеющий блок (1) управления по п. 22 или 23.
| ВЕНТИЛЬ ВЫСОКОГО ДАВЛЕНИЯ | 2012 |
|
RU2489625C1 |
| ПРЕДОХРАНИТЕЛЬНЫЙ КЛАПАН | 0 |
|
SU353099A1 |
| EP 89307719 A, 28.07.1989. | |||

