Настоящее изобретение касается подъемного устройства согласно ограничительной части п.1 формулы изобретения и транспортного средства с таким подъемным устройством.
Родовые подъемные устройства, имеющие рабочее устройство, расположенное с возможностью перестановки на крановой стреле подъемного устройства, давно известны из уровня техники. При этом координация определенных движений крановой стрелы подъемного устройства и определенных движений расположенного на нем рабочего устройства может ставить высокие требования к пользователю крана. Обычно это связано с повышенными издержками обслуживания и замедленной скоростью работы и может также легко приводить к ошибкам обслуживания, например, из-за недостаточно обученного пользователя или невнимательности. Так при координации определенных движений крановой стрелы и определенных движений рабочего устройства могут возникать нежелательные повреждения крана, рабочего устройств или же поднимаемого при необходимости груза.
Родовое подъемное устройство известно из EP 0 397 076 A1. В этой публикации показан вилочный погрузчик, имеющий телескопическую и вертикально поворачивающуюся стрелу и расположенное на ней с возможностью поворота рабочее устройство. Положение поворота рабочего устройства синхронизировано с движением подъемного цилиндра, благодаря чему может сохраняться горизонтальная ориентация рабочего устройства при вертикальном повороте консольной стрелы. У такого подъемного устройства без конструктивных изменений невозможно задавать отличающееся номинальное положение рабочего устройства. Также без конструктивных изменений невозможно свободно позиционировать рабочее устройство относительно консоли (стрелы). Кроме того, у такого подъемного устройства возможна только подстройка горизонтальной ориентации рабочего устройства при повороте плеча стрелы в вертикальной плоскости.
Задачей изобретения является предложить кран, который имеет возможность расширенного и облегченного обслуживания, а также повышенную надежность в отношении ошибок обслуживания.
Эта задача решается с помощью подъемного устройства с признаками п.1 формулы изобретения и транспортного средства, имеющего такое подъемное устройство. Предпочтительные варианты осуществления изобретения определены в зависимых пунктах формулы изобретения.
Предлагаемое изобретением подъемное устройство, которое имеет регулировочное устройство для настройки заданного или задаваемого номинального положения рабочего устройства относительно крановой стрелы или относительно заданного или задаваемого направления в пространстве, отличающееся тем, что
- предусмотрен по меньшей мере один сенсор для регистрации действительного положения рабочего устройства относительно крановой стрелы или относительно направления в пространстве, сигналы которого могут вводиться в регулировочное устройство, и что
- регулировочное устройство двигает рабочее устройство в зависимости от сигналов указанного по меньшей мере одного сенсора в номинальное положение, в случае если действительное положение не равно номинальному положению.
То есть подъемное устройство имеет регулировочное устройство, посредством которого может настраиваться положение рабочего устройства относительно крановой стрелы. При этом положение рабочего устройства может соответствовать заданному или задаваемому номинальному положению рабочего устройства относительно крановой стрелы или заданного/задаваемого направления, соответственно, ориентации рабочего устройства в пространстве. Для регистрации действительного положения рабочего устройства, то есть, например, имеющегося в данный момент при каком-либо рабочем процессе положения рабочего устройства относительно крановой стрелы или некоторого пространственного направления, предусмотрен по меньшей мере один сенсор. Сигналы этого сенсора могут вводиться в регулировочное устройство. В зависимости от указанного по меньшей мере одного сенсора регулировочное устройство может двигать рабочее устройство в номинальное положение. Это может осуществляться при отклонении действительного положения от номинального положения, благодаря чему рабочее устройство может двигаться по существу из любого положения в номинальное положение, или, например, также рабочее устройство может удерживаться во время рабочего процесса в номинальном положении.
Может быть предусмотрено, чтобы регулировочное устройство имело привод для изменения геометрии крановой стрелы, и положение рабочего устройства могло изменяться с помощью этого привода для изменения геометрии крановой стрелы. Привод может быть выполнен в виде по меньшей мере одного гидравлического цилиндра для изменения угла наклона крановой стрелы, положения сгиба крановой стрелы или положения сдвига крановой стрелы. С помощью поворотного механизма может обеспечиваться поворот крановой стрелы вокруг, например, вертикальной оси поворота. Вообще, с помощью регулировочного устройства крановая стрела, части крановой стрелы могут двигаться друг относительно друга, а рабочее устройство – относительно крановой стрелы, соответственно, относительно частей крановой стрелы.
Может быть также предусмотрено, чтобы регулировочное устройство имело расположенный между крановой стрелой и рабочим устройством исполнительный элемент, и положение рабочего устройства могло изменяться с помощью этого исполнительного элемента. Посредством такого исполнительного элемента, то есть движущего устройства, рабочее устройство может, например, без изменения геометрии крановой стрелы двигаться относительно крановой стрелы. Такой исполнительный элемент может быть выполнен, например, в виде вращателя или же вращательного привода, зубчатой рейки или гидравлического цилиндра. Посредством исполнительного элемента может обеспечиваться поворот, кантование (опрокидывание), вращение или передвижение рабочего устройства.
Также возможно регулировочное устройство, которое включает в себя изменяемую по своей геометрии крановую стрелу и расположенный между крановой стрелой и рабочим устройством исполнительный элемент.
Может быть также предусмотрено, чтобы номинальное положение было выполнено в виде положения рабочего устройства с по меньшей мере одним предопределенным углом в пространстве. Предопределенный угол в пространстве может, например, соответствовать углу оси рабочего устройства относительно вертикали или горизонтали. Другими словами, при этом может идти речь о некотором абсолютном положении рабочего устройства в пространстве.
Возможно, чтобы указанный по меньшей мере один сенсор был выполнен в виде сенсора угла, в виде сенсора силы или момента, в виде сенсора наклона, в виде сенсора ускорения, в виде сенсора приближения, в виде оптического регистрирующего устройства или в виде устройства для эмиссии и приема звуковых волн, в частности ультразвука, или в виде устройства для эмиссии и приема электромагнитных волн, в частности радара, или лазерного света. Благодаря этому, в зависимости от исполнения сенсора, может регистрироваться относительное положение рабочего устройства относительно крановой стрелы и/или положение рабочего устройства относительно направления в пространстве. Также с помощью соответственно выполненного сенсора может определяться, соответственно, регистрироваться отклонение действительного положения рабочего устройства относительно номинального положения рабочего устройства.
Может быть предпочтительно, если регулировочное устройство имеет управление, в которое могут вводиться сигналы указанного по меньшей мере одного сенсора для регистрации действительного положения рабочего устройства относительно крановой стрелы или относительно направления в пространстве. Управление регулировочного устройства может, например, сначала приводить вводимые в него сигналы (необработанные данные) сенсора в формат сигнала, который может подвергаться дальнейшей обработке управлением. Так сигналы указанного по меньшей мере одного сенсора могут учитываться регулировочным устройством при движении рабочего устройства.
При этом может быть предпочтительно, чтобы управление было расположено на рабочем устройстве или в крановом управлении крановой стрелы. То есть управление может быть выполнено отдельно от кранового управления крановой стрелы, например, в виде дополнительно смонтированного модуля, или в виде части кранового управления, например, будучи интегрировано в крановое управление. Крановое управление может включать в себя стационарный пункт (пост) обслуживания или же мобильный беспроводной пульт, при этом управление может быть выполнено также соответственно в пункте обслуживания или в беспроводном пульте.
Управление может, в принципе, иметь рабочий режим, в котором регулировочное устройство двигает рабочее устройство в зависимости от вводимых в регулировочное устройство сигналов указанного по меньшей мере одного сенсора в номинальное положение, в случае если действительное положение не равно номинальному положению.
Может быть предпочтительно, чтобы был предусмотрен по меньшей мере один сенсор, с помощью которого может регистрироваться обусловленное захватом (приемом) груза посредством рабочего устройства изменение положения рабочего устройства относительно крановой стрелы или относительно направления в пространстве. Может быть также предусмотрен по меньшей мере один сенсор, с помощью которого может регистрироваться обусловленная захватом (приемом) груза посредством рабочего устройства механическая нагрузка на рабочее устройство. Такая механическая нагрузка на рабочее устройство может быть, например, нагрузкой от момента.
При этом может быть предусмотрено, чтобы при захвате (приеме) груза могло регистрироваться воздействие рабочего устройства на груз вне центра тяжести груза. Так может регистрироваться, например, осуществляющееся при захвате груза движение рабочего устройства, то есть, например, поворот, кантование, вращение или передвижение рабочего устройства. Такое движение может производиться, например, за счет действующего на рабочее устройство момента, когда, например, протяженный груз подвергается воздействию, соответственно, стропуется рабочим устройством на определенном расстоянии от центра тяжести груза.
При этом может быть также предусмотрено, чтобы указанный по меньшей мере один сенсор для регистрации действительного положения рабочего устройства образовывал указанный по меньшей мере один сенсор. То есть сенсор, с помощью которого может регистрироваться обусловленное захватом груза посредством рабочего устройства изменение положения рабочего устройства относительно крановой стрелы или относительно направления в пространстве, или с помощью которого может регистрироваться обусловленная захватом груза посредством рабочего устройства механическая нагрузка на рабочее устройство, может быть образован сенсором для регистрации действительного положения рабочего устройства. Так сенсор для регистрации действительного положения рабочего устройства, например, путем регистрации имеющегося в данный момент при рабочем процессе положения рабочего устройства относительно крановой стрелы или относительно пространственного направления может регистрировать имеющееся в этот момент положение, откуда может находиться изменение положения рабочего устройства относительно крановой стрелы или относительно направления в пространстве или механическая нагрузка на рабочее устройство.
Может быть также предусмотрено, чтобы регулировочное устройство было выполнено для того, чтобы допускать или поддерживать движения, передаваемые пользователем в ручном режиме или с помощью педали на рабочее устройство или на захваченный рабочим устройством груз или жестами относительно рабочего устройства. Так, например, с помощью по меньшей мере одного из смонтированных сенсоров, при необходимости в предназначенном специально для этого рабочем режиме регулировочного устройства, может реализовываться воздействие пользователя на рабочее устройство или же на захваченный рабочим устройством груз для движения рабочего устройства. Так, например, рабочее устройство или захваченный рабочим устройством груз может приводиться в положение, задаваемое пользователем путем непосредственного позиционирования (ориентации). Возможно также, чтобы с помощью одного из смонтированных сенсоров рабочее устройство могло позиционироваться, соответственно, ориентироваться пользователем посредством жестового управления.
В принципе, может быть предусмотрено, чтобы рабочее устройство было выполнено в виде грузозахватного средства. При этом возможны различные варианты осуществления грузозахватного средства, такие как, например, грузозахватное средство в виде манипулятора, обеспечивающего вообще физическое взаимодействие с окружением, в виде вращателя, кантователя-вращателя или грейфера. Грузозахватное средство в каждом случае может включать в себя расположенный на нем исполнительный элемент.
Может быть предусмотрено, чтобы указанный по меньшей мере один сенсор для регистрации действительного положения рабочего устройства мог располагаться на или в рабочем устройстве. То есть сенсор может быть располагаем на рабочем устройстве или в рабочем устройстве, соответственно, в части рабочего устройства. Также сенсор может быть располагаем на крановой стреле или в крановой стреле, соответственно, в части крановой стрелы. Возможно также, чтобы сенсор был располагаем между рабочим устройством и крановой стрелой. Не исключено, что сенсор может быть располагаем на или в транспортном средстве.
Одно из особенно предпочтительных исполнений подъемного устройства может получиться, когда это подъемное устройство выполнено в виде погрузочного крана.
Как уже было упомянуто, испрашивается также охрана для транспортного средства, имеющего подъемное устройство, которое описано ранее.
Примеры осуществления изобретения рассматриваются с помощью фигур. Показано:
фиг.1: один из вариантов осуществления подъемного устройства, имеющего подъемную рабочую площадку;
фиг.2: транспортное средство с подъемным устройством;
фиг.3a и 3b: транспортное средство с подъемным устройством в разных положениях поворота;
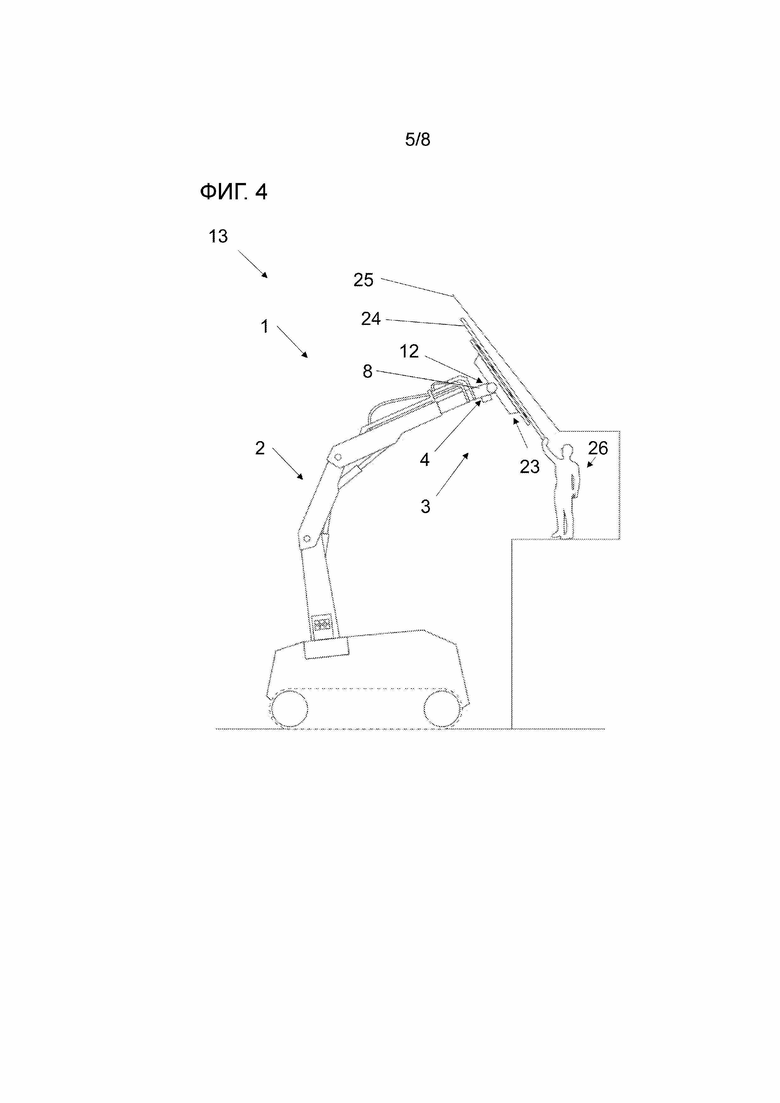
фиг.4: другой вариант осуществления транспортного средства с подъемным устройством;
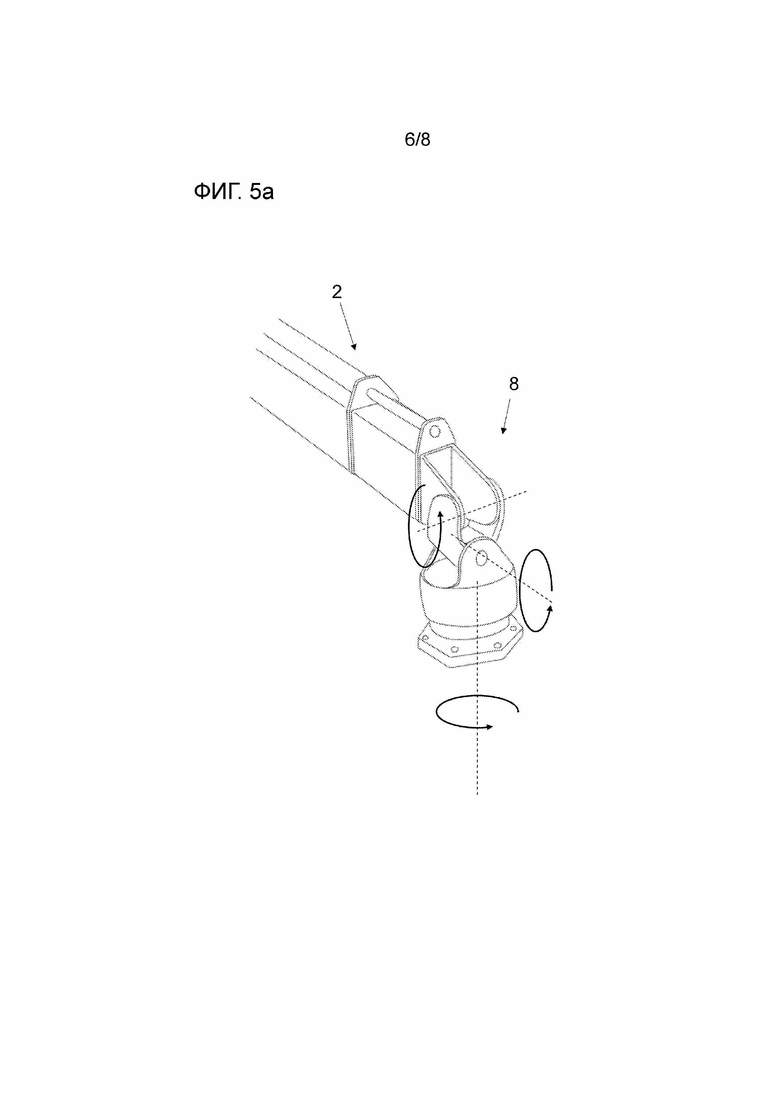
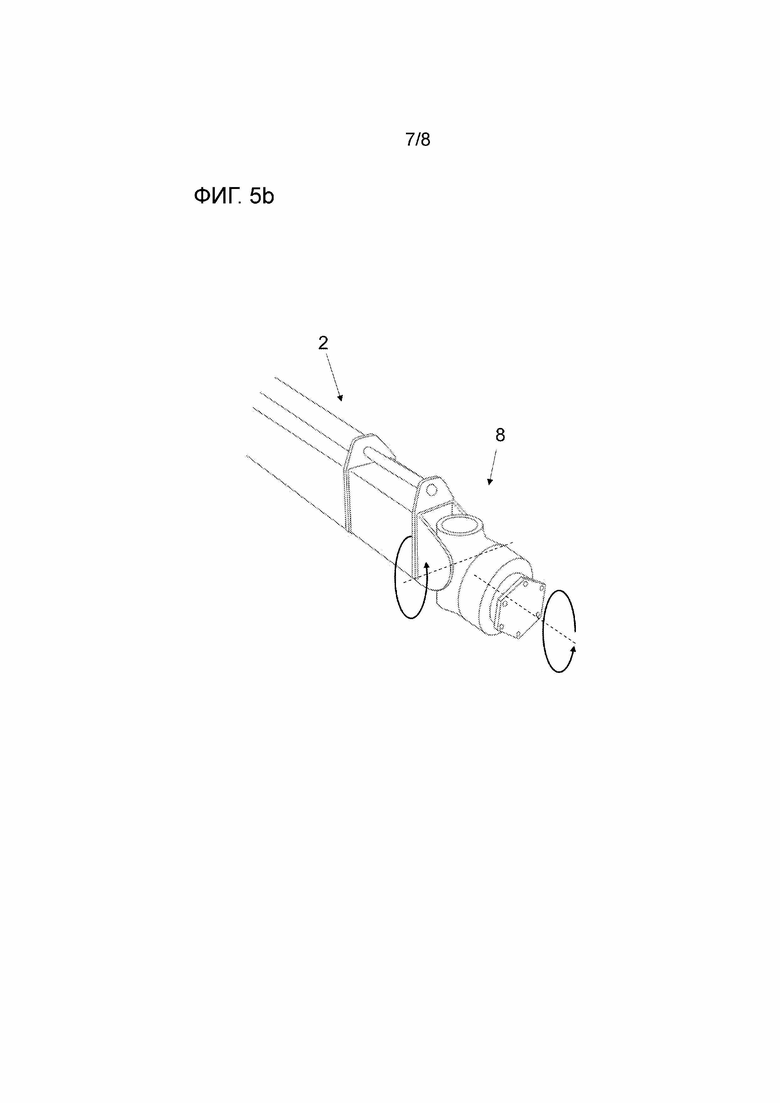
фиг.5a и 5b: местные виды крановой стрелы, имеющей расположенный на ней исполнительный элемент, и
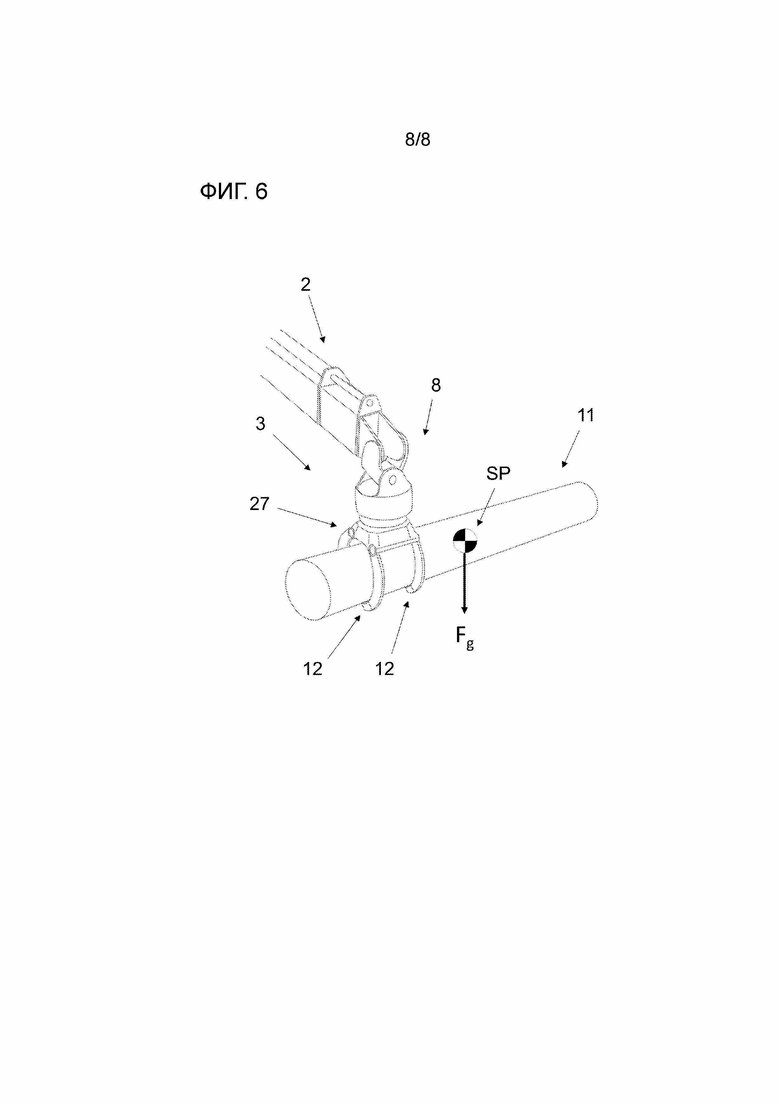
фиг.6: местный вид крановой стрелы с расположенным на ней рабочим устройством.
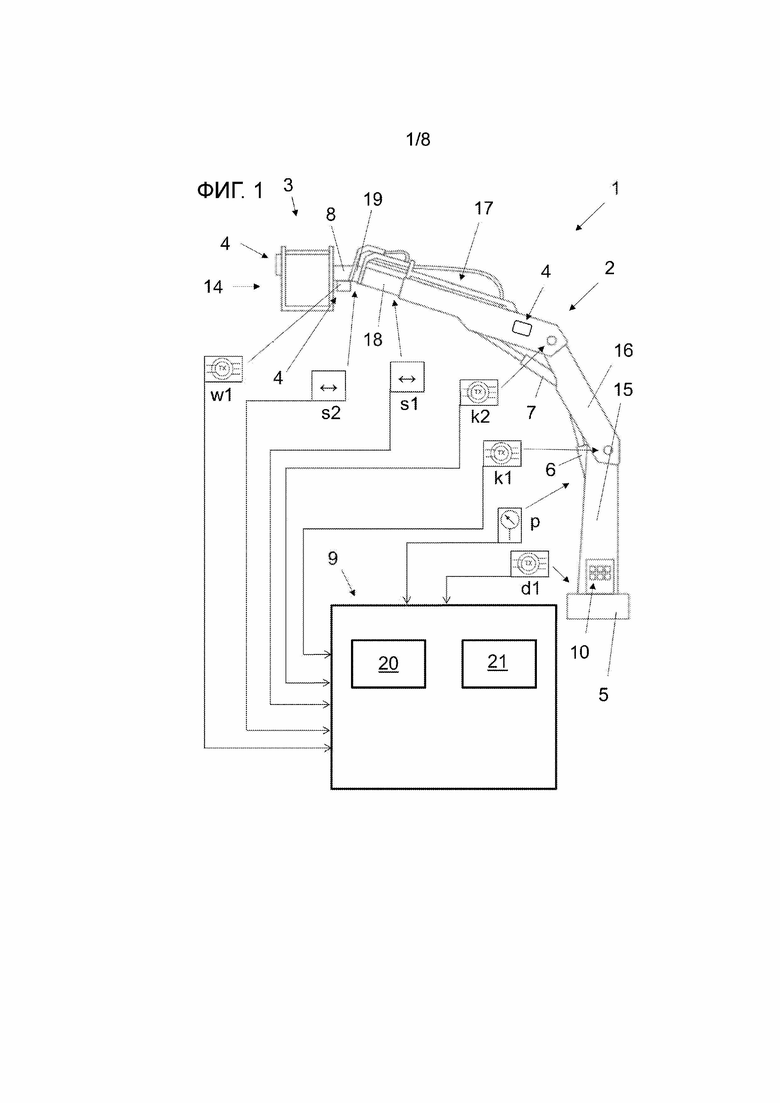
На фиг.1 показано одно выполнение подъемного устройства 1 в виде крановой стрелы 2 с расположенным на ней рабочим устройством 3 в виде подъемной рабочей площадки 14 и управлением 9 с надлежащей сенсорикой. Крановая стрела 2 имеет крановый цоколь 5, крановую мачту 15, подъемную стрелу 16 и сочлененную стрелу 17, при этом сочлененная стрела 17 для изменения длины крановой стрелы 2 имеет телескопическую первую крановую выдвижную стрелу 18 и телескопическую вторую крановую выдвижную стрелу 19. В показанном осуществлении сенсорика подъемного устройства 1 имеет сенсор s1 положения сдвига для регистрации положения сдвига первой крановой выдвижной стрелы 18, сенсор s2 положения сдвига для регистрации положения сдвига второй крановой выдвижной стрелы 19, сенсор d1 угла вращения для регистрации положения вращения вокруг вертикальной оси крановой мачты 15 относительно кранового цоколя 5, сенсор k1 угла сгиба для регистрации положения угла сгиба подъемной стрелы 16 относительно крановой мачты 15, сенсор k2 угла сгиба для регистрации положения угла сгиба сочлененной стрелы 17 относительно подъемной стрелы 16 и сенсор p давления для регистрации гидравлического давления в гидравлическом цилиндре 6 (подъемный цилиндр) подъемного устройства 1. Регистрация давления может также осуществляться для гидравлического цилиндра 7 (цилиндр сгиба) подъемного устройства 1. Также сенсорика в показанном варианте осуществления включает в себя сенсор 4, посредством которого может регистрироваться положение рабочего устройства 3, соответственно, подъемной рабочей площадки 14. Регистрируемое с помощью сенсора 4, выполненного в этом варианте осуществления в виде сенсора w1 угла, положение рабочего устройства 3, соответственно, подъемной рабочей площадки 14 может соответствовать положению относительно крановой стрелы 2 или относительно некоторого направления в пространстве. Так, например, с помощью сенсора w1 угла может регистрироваться соответственно положение угла вращения рабочего устройства 2, соответственно, подъемной рабочей площадки 14 вокруг одной из трех пространственных осей. Возможно также, чтобы сенсор 4 для регистрации положения рабочего устройства 3, соответственно, подъемной рабочей площадки 14 был расположен на рабочем устройстве 3, соответственно, подъемной рабочей площадке 14 или на самой крановой стреле 2. Регистрируемые сенсорикой значения вводятся в управление 9 через соответствующие соединения, будь то кабельная измерительная линия или беспроводное соединение. Управление 9 может иметь память 20 и вычислительный блок 21. Управление 9 может быть интегрировано в крановое управление 10 крановой стрелы 2 или быть расположено на рабочем устройстве 3.
Положение рабочего устройства 3, соответственно, подъемной рабочей площадки 14 может изменяться путем изменения геометрии крановой стрелы 2 и с помощью расположенного между крановой стрелой 2 и рабочим устройством 3, соответственно, подъемной рабочей площадкой 14 исполнительного элемента 8.
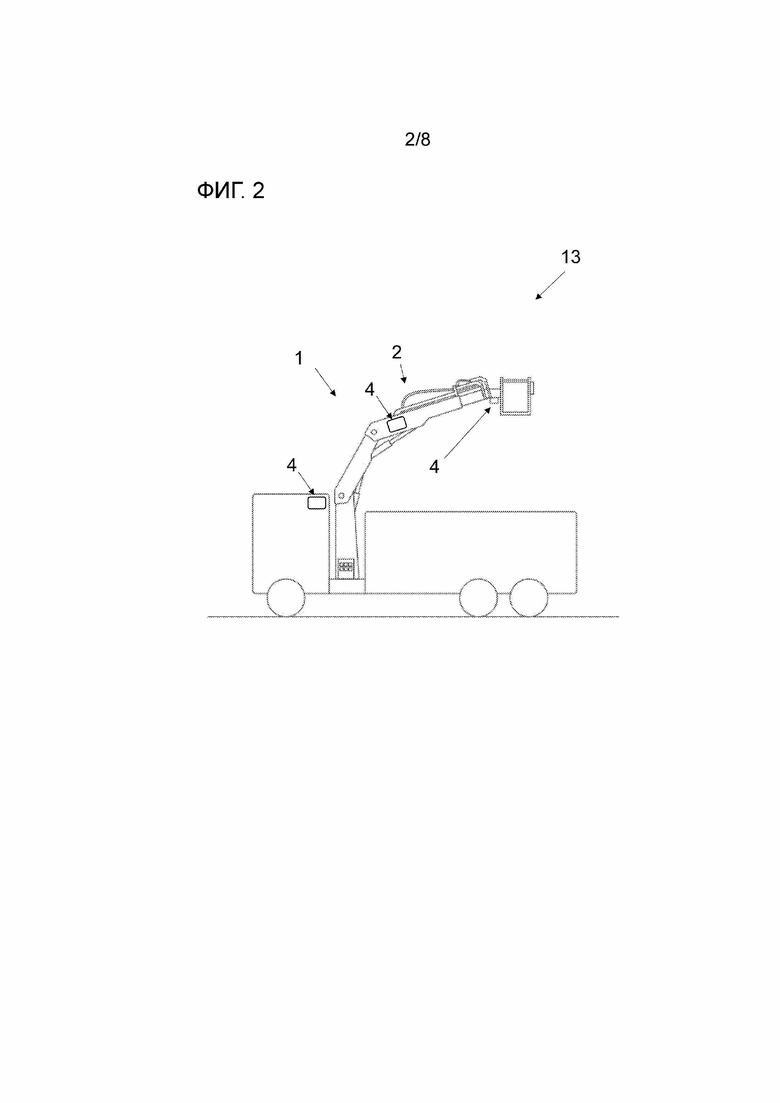
На фиг.2 показан вид сбоку транспортного средства 13, имеющего выполненное в виде крановой стрелы 2 подъемное устройство 1. При этом исполнение подъемного устройства 1 по существу соответствует исполнению фиг.1.
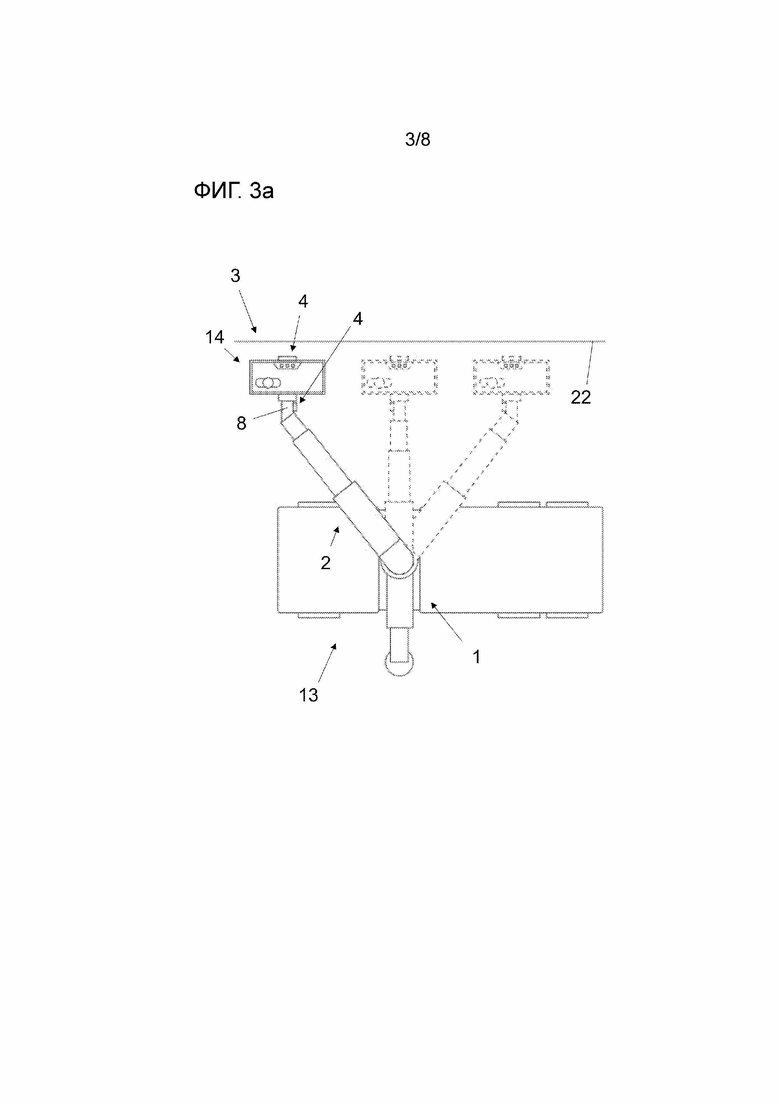
На фиг.3a на виде в плане показано транспортное средство 13, имеющее выполненное в виде крановой стрелы 2 подъемное устройство 1, которое имеет крановую стрелу 2 и расположенное на крановой стреле 2 и движимое с ее помощью и с помощью исполнительного элемента 8 рабочее устройство 3 в виде подъемной рабочей площадки 14. При этом указанное исполнение подъемного устройства 1 снова по существу соответствует исполнению фиг.1. Как изображено, возможно, чтобы сенсор 4 для регистрации положения рабочего устройства 3, соответственно, подъемной рабочей площадки 14 был расположен на рабочем устройстве 3, на крановой стреле 2 и на самом транспортном средстве 13.
Рабочее устройство 3 в виде подъемной рабочей площадки расположено с возможностью перестановки относительно крановой стрелы 2, при этом на фиг.3a изображены разные положения поворота вокруг вертикальной оси поворота рабочего устройства 3 в виде подъемной рабочей площадки 14 относительно крановой стрелы 2 во время поворота крановой стрелы 2 вокруг крановой мачты 5. Регистрация относительного положения рабочего устройства 3, соответственно, подъемной рабочей площадки 14 относительно крановой стрелы 2, соответственно, также регистрация положения рабочего устройства 3, соответственно, подъемной рабочей площадки 14 в пространстве может осуществляться с помощью сенсора 4, расположенного на рабочем устройстве 3, соответственно, подъемной рабочей площадке 14 или на подъемном устройстве 1. Как изображено в примере фиг.3a, номинальное положение рабочего устройства 3 может соответствовать заданному направлению в пространстве. Как показано, рабочее устройство 3 в виде подъемной рабочей площадки 14 может быть сначала ориентировано параллельно стене 22 (левое изображение крановой стрелы 2 и подъемной рабочей площадки 14). При повороте крановой стрелы 2 вокруг вертикальной оси поворота рабочее устройство 3 в виде подъемной рабочей площадки может двигаться, соответственно, поворачиваться регулировочным устройством, которое в этом варианте осуществления образовано крановой стрелой 2 и исполнительным элементом 8, таким образом, чтобы рабочее устройство 3 во время поворота крановой стрелы 2 продолжало удерживаться в номинальном положении, то есть в ориентации, проходящей параллельно стене 22. Это номинальное положение, то есть заданное пространственное направление, может при этом следовать абсолютному направлению в пространстве или, как показано также на фиг.3a, направлению стены 22. Одно применение для этого показано на фиг.3b.
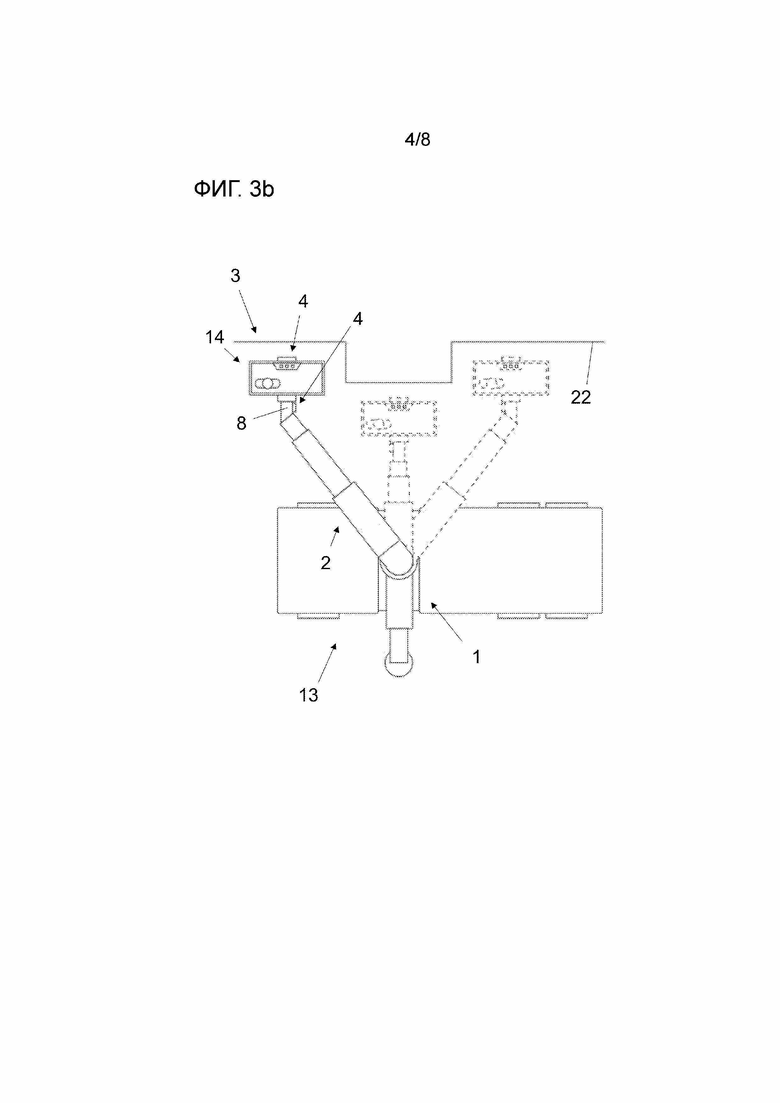
Изображение фиг.3b по существу соответствует изображению фиг.3a, однако при этом стена 22 имеет неплоскую конфигурацию. Сигналы сенсора 4 могут вводиться в регулировочное устройство, которое, как изображено, образовано крановой стрелой 2 и исполнительным элементом 8, и рабочее устройство 3 в виде подъемной рабочей площадки 14 может во время поворота крановой стрелы 2 удерживаться в желаемом номинальном положении. В примере фиг.3a, а также 3b номинальное положение может примерно соответствовать неизменному расстоянию от рабочего устройства 3 в виде подъемной рабочей площадки 14 до стены 22.
На фиг.4 показано другое выполнение транспортного средства 13 в виде гусеничного крана, имеющего подъемное устройство 1 в виде крановой стрелы 2, которая имеет рабочее устройство 3 в виде грейфера 23 с вакуумным всасыванием. Грейферы 23 с вакуумным всасыванием могут применяться, например, при манипулировании плоским грузом 11, таким как, например, стеклянный лист 24. На фиг.4 изображена установка стеклянного листа 24 на фасаде 25. Подъемное устройство 1, которое может быть выполнено аналогично показанному на фиг.1 варианту осуществления подъемного устройства 1, снова имеет сенсор 4 для регистрации мгновенного положения рабочего устройства 3, соответственно, грейфера 23 с вакуумным всасыванием. Между крановой стрелой 2 и рабочим устройством 3, соответственно, грейфером 23 с вакуумным всасыванием расположен исполнительный элемент 8. В показанном на фиг.4 варианте осуществления подъемное устройство 1 имеет другой сенсор 12, который может регистрировать механическую нагрузку на рабочее устройство 3 от груза 11. С помощью этого другого сенсора 12, например, выполненного в виде сенсора силы, может регистрироваться сила веса, соответственно, мгновенная нагрузка, передаваемая от стеклянного листа 24 на грейфер 23 с вакуумным всасыванием, соответственно, исполнительный элемент 8. Благодаря этому может обеспечиваться, чтобы пользователь 26 в ручном режиме или с помощью педали, то есть рукой или ногой, мог допускать или поддерживать движения, передаваемые на рабочее устройство 3 или на захваченный рабочим устройством 3 груз 11. В показанном варианте осуществления так, например, может облегчаться вставление стеклянного листа 24 на фасаде 25 путем непосредственной, в ручном режиме ориентации стеклянного листа 24 пользователем 26. Возможно также, чтобы другой сенсор 12 был выполнен в виде оптического сенсора, и осуществлялось опосредствованная ориентация стеклянного листа 24 и рабочего устройства 3 жестами пользователя 26 относительно рабочего устройства 3.
На фиг.5a и 5b показаны местные виды крановой стрелы 2, имеющей расположенный на ней исполнительный элемент 8 в виде кантователя-вращателя в разных положениях поворота. Крановая стрела 2 может быть выполнена, в принципе, аналогично варианту осуществления крановой стрелы 2, показанному на фиг.1. Исполнительный элемент 8, который показан на фиг.5a, может выполнять, соответственно, обеспечивать движение поворота вокруг трех пространственных осей. Благодаря этому расположенное на исполнительном элементе 8 рабочее устройство (не изображено) может по существу свободно позиционироваться в пространстве, соответственно, относительно крановой стрелы 2. Исполнительный элемент 8, который показан на фиг.5b, может допускать движение поворота вокруг двух пространственных осей. Показанный на фиг.5a и 5b исполнительный элемент 8 может в каждом случае иметь сенсор (не изображено), с помощью которого может регистрироваться положение расположенного на исполнительном элементе 8 рабочего устройства.
На фиг.6 показан местный вид выполненной, как на фиг.5a, крановой стрелы 2, имеющей расположенный на ней исполнительный элемент 8 и расположенное на нем рабочее устройство 3 в виде грейфера 27. Грейфер 27 имеет в показанном варианте осуществления в каждом из зубьев грейфера выполненные в виде сенсора давления сенсоры 12, посредством которых может регистрироваться сила, действующая на рабочее устройство 3 со стороны захваченного груза 11. Так, например, при воздействии рабочего устройства 3 на груз 11 вне центра SP тяжести на рабочее устройство 3 может действовать вызванный силой Fg веса груза 11 момент - и вместе с тем сила, которая может регистрироваться сенсорами 12, соответственно, путем сравнения сил, найденных сенсорами 12. Действующая на исполнительный элемент 8 сила может также регистрироваться интегрированным в исполнительный элемент 8 сенсором (не изображено).
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
1 Подъемное устройство
2 Крановая стрела
3 Рабочее устройство
4 Сенсор
5 Крановый цоколь
6, 7 Гидравлический цилиндр
8 Исполнительный элемент
9 Управление
10 Крановое управление
11 Груз
12 Сенсор
13 Транспортное средство
14 Подъемная рабочая площадка
15 Крановая мачта
16 Подъемная стрела
17 Сочлененная стрела
18 первая крановая выдвижная стрела
19 Вторая крановая выдвижная стрела
20 Память
21 Вычислительный блок
22 Стена
23 Грейфер с вакуумным всасыванием
24 Стеклянный лист
25 Фасад
26 Пользователь
27 Грейфер
Fg Сила веса
SP Центр тяжести
P Сенсор давления
s1, s2 Сенсор положения сдвига
d1 Сенсор угла вращения
k1, k2, k3 Сенсор угла сгиба
w1 Сенсор угла
| название | год | авторы | номер документа |
|---|---|---|---|
| Кран | 2018 |
|
RU2683918C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И ГРУЗОВОЙ КРАН С УСТРОЙСТВОМ УПРАВЛЕНИЯ | 2018 |
|
RU2737639C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАГРУЗКИ, БЛОК УПРАВЛЕНИЯ ДЛЯ ГИДРАВЛИЧЕСКОГО ПОДЪЕМНОГО УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ТАКОГО СПОСОБА | 2017 |
|
RU2714833C1 |
| КРАН | 2017 |
|
RU2734966C2 |
| СПОСОБ УПРАВЛЕНИЯ И/ИЛИ РЕГУЛИРОВАНИЯ СВЯЗАННОГО С ТРАНСПОРТНЫМ СРЕДСТВОМ ПОДЪЕМНОГО УСТРОЙСТВА | 2022 |
|
RU2819298C2 |
| СТРОИТЕЛЬНАЯ МАШИНА | 2018 |
|
RU2765314C2 |
| КРАНОВЫЙ КОНТРОЛЛЕР | 2015 |
|
RU2641395C1 |
| ПРИВОД ВРАЩЕНИЯ | 2018 |
|
RU2709232C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ КРАНА, СТРОИТЕЛЬНОЙ МАШИНЫ И/ИЛИ АВТОПОГРУЗЧИКА | 2017 |
|
RU2741456C2 |
| СТРОИТЕЛЬНАЯ МАШИНА, В ЧАСТНОСТИ КРАН, И СПОСОБ УПРАВЛЕНИЯ ЕЮ | 2017 |
|
RU2735596C2 |
Предложено подъемное устройство (1). Подъемное устройство содержит сгибаемую крановую стрелу (2) и расположенное на крановой стреле (2) и движимое ею рабочее устройство (3). Рабочее устройство (3) расположено с возможностью перестановки относительно крановой стрелы (2). Предусмотрено регулировочное устройство для настройки заданного или задаваемого номинального положения рабочего устройства (3) относительно крановой стрелы (2) или относительно заданного или задаваемого направления в пространстве. Предусмотрен сенсор (4) для регистрации действительного положения рабочего устройства (3) относительно крановой стрелы (2) или относительно направления в пространстве, сигналы которого могут вводиться в регулировочное устройство. Регулировочное устройство двигает рабочее устройство (3) в зависимости от сигналов указанного по меньшей мере одного сенсора (4) в номинальное положение, в случае если действительное положение не равно номинальному положению. Регулировочное устройство выполнено для того, чтобы допускать или поддерживать движения, передаваемые пользователем в ручном режиме или с помощью педали на рабочее устройство (3) или на захваченный рабочим устройством (3) груз или жестами относительно рабочего устройства (3). Предложено также транспортное средство. Достигается повышение надежности. 2 н. и 12 з.п. ф-лы, 7 ил.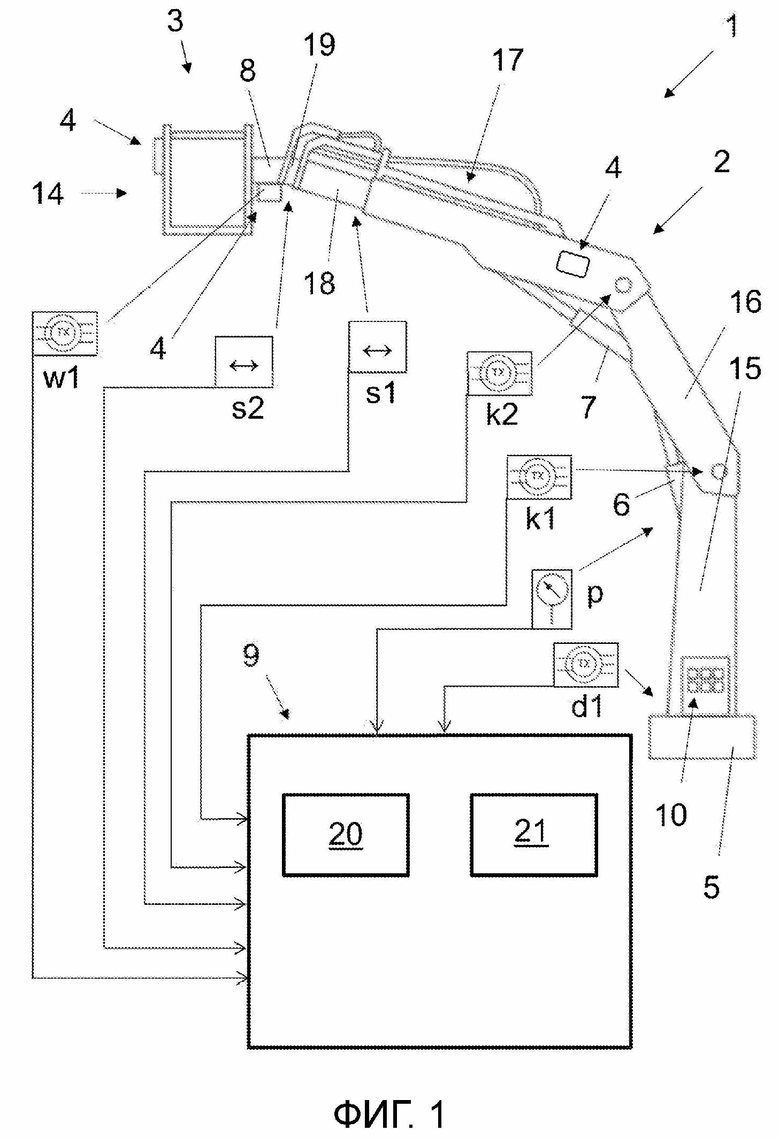
1. Подъемное устройство (1), имеющее предпочтительно сгибаемую крановую стрелу (2) и расположенное на крановой стреле (2) и движимое ею рабочее устройство (3), причем это рабочее устройство (3) расположено с возможностью перестановки относительно крановой стрелы (2), причем предусмотрено регулировочное устройство для настройки заданного или задаваемого номинального положения рабочего устройства (3) относительно крановой стрелы (2) или относительно заданного или задаваемого направления в пространстве, отличающееся тем, что предусмотрен по меньшей мере один сенсор (4) для регистрации действительного положения рабочего устройства (3) относительно крановой стрелы (2) или относительно направления в пространстве, сигналы которого могут вводиться в регулировочное устройство, и что регулировочное устройство двигает рабочее устройство (3) в зависимости от сигналов указанного по меньшей мере одного сенсора (4) в номинальное положение, в случае если действительное положение не равно номинальному положению, и что регулировочное устройство выполнено для того, чтобы допускать или поддерживать движения, передаваемые пользователем в ручном режиме или с помощью педали на рабочее устройство (3) или на захваченный рабочим устройством (3) груз (11) или жестами относительно рабочего устройства (3).
2. Подъемное устройство по п.1, причем регулировочное устройство имеет привод (6, 7) для изменения геометрии крановой стрелы (2), предпочтительно в виде поворотного механизма для крановой стрелы и по меньшей мере одного гидравлического цилиндра (6, 7) для изменения угла наклона крановой стрелы (2), положения сгиба крановой стрелы (2) или положения сдвига крановой стрелы (2), и положение рабочего устройства (3) может изменяться с помощью привода (6, 7) для изменения геометрии крановой стрелы (2).
3. Подъемное устройство по одному из предыдущих пунктов, причем регулировочное устройство имеет расположенный между крановой стрелой (2) и рабочим устройством (3) исполнительный элемент (8), предпочтительно в виде вращателя, зубчатой рейки или гидравлического цилиндра, и положение рабочего устройства (3) может изменяться с помощью этого исполнительного элемента (8).
4. Подъемное устройство по одному из предыдущих пунктов, причем номинальное положение выполнено в виде положения рабочего устройства (3) с по меньшей мере одним предопределенным углом в пространстве.
5. Подъемное устройство по одному из предыдущих пунктов, причем указанный по меньшей мере один сенсор (4) выполнен в виде сенсора (w1) угла, в виде сенсора силы или момента, в виде сенсора наклона, в виде сенсора ускорения, в виде сенсора приближения, в виде оптического регистрирующего устройства или в виде устройства для эмиссии и приема звуковых волн, в частности ультразвука, или в виде устройства для эмиссии и приема электромагнитных волн, в частности радара, или лазерного света.
6. Подъемное устройство по одному из предыдущих пунктов, причем регулировочное устройство имеет управление (9), в которое могут вводиться сигналы указанного по меньшей мере одного сенсора (4) для регистрации действительного положения рабочего устройства (3) относительно крановой стрелы (2) или относительно направления в пространстве.
7. Подъемное устройство по п.6, причем управление (9) расположено на рабочем устройстве (3) или выполнено в крановом управлении (10) крановой стрелы (2).
8. Подъемное устройство по одному из предыдущих пунктов, причем предусмотрен по меньшей мере один сенсор (12), с помощью которого может регистрироваться обусловленное захватом груза (11) посредством рабочего устройства (3) изменение положения рабочего устройства (3) относительно крановой стрелы (2) или относительно направления в пространстве или с помощью которого может регистрироваться обусловленная захватом груза (11) посредством рабочего устройства (3) механическая нагрузка - предпочтительно нагрузка от момента - на рабочее устройство (3).
9. Подъемное устройство по п.8, причем при захвате груза (11) может регистрироваться воздействие рабочего устройства (3) на груз (11) вне центра (SP) тяжести груза (11).
10. Подъемное устройство по п.8 или 9, причем указанный по меньшей мере один сенсор (4) для регистрации действительного положения рабочего устройства (3) образует указанный по меньшей мере один сенсор (12).
11. Подъемное устройство по одному из предыдущих пунктов, причем рабочее устройство (3) выполнено в виде грузозахватного средства, в частности в виде манипулятора, вращателя, кантователя-вращателя или грейфера, при необходимости с в каждом случае расположенным на нем исполнительным элементом (8).
12. Подъемное устройство по одному из предыдущих пунктов, причем указанный по меньшей мере один сенсор (4) для регистрации действительного положения рабочего устройства (3) расположен на или в рабочем устройстве (3), на или в крановой стреле (2) или между рабочим устройством (3) и крановой стрелой (2) или сенсор (4) может располагаться на или в транспортном средстве (13).
13. Подъемное устройство по одному из предыдущих пунктов, причем это подъемное устройство (1) выполнено в виде погрузочного крана.
14. Транспортное средство (13), имеющее подъемное устройство (1) по меньшей мере по одному из предыдущих пунктов.
| WO 2017157482 A1, 21.09.2017 | |||
| EP 2295209 A1, 16.03.2011 | |||
| Радиометр потоков ионизирующего излучения | 1970 |
|
SU397076A1 |

