Данное изобретение касается крана согласно ограничительной части независимого пункта 1 формулы изобретения и транспортного средства с таким краном.
Краны с крановым контроллером указанного вначале рода, которые в рабочем режиме предназначены для того, чтобы осуществлять координатное управление стреловой системой, известны из уровня техники.
При обычном обслуживании крана, при котором отдельные приводные элементы стреловой системы по отдельности управляются непосредственно пользователем, соответственно, оператором посредством выдаваемых им управляющих команд, движение оголовка крана стреловой системы получается в результате отдельных управляемых пользователем установочных движений. Движение оголовка крана указанной стреловой системы примерно по идеальной вертикальной траектории требует, таким образом, сложной выдачи пользователем отдельных управляющих команд.
При координатном управлении стреловой системой, напротив, отдельные приводные элементы стреловой системы управляются крановым контроллером так, что пользователь сам управляет поведением оголовка крана стреловой системы вместо отдельных приводных элементов. Известны варианты выполнения систем координатного управления, при которых кран управляется пользователем, по существу, лишь двумя управляющими элементами (например, джойстиками): одним для поворота вокруг вертикальной оси мачты крана и одним для осуществления горизонтального движения и вертикального движения оголовка крана.
Вследствие высокой сложности некоторых стреловых систем, которые могут содержать, например, мачту крана, установленную поворотно на мачте крана основную стрелу (называемую также подъемной стрелой) и установленную поворотно на основной стреле шарнирно-сочлененную стрелу с выдвижной стрелой, установленной в ней с возможностью перемещения, указанная стреловая система может иметь больше степеней свободы, чем по меньшей мере необходимо для позиционирования и ориентирования оголовка крана в пространстве по. Так, мачта крана рассмотренного вначале рода установлена поворотно за счет конструктивно задаваемой поворотной области мачты крана и благодаря своей поворотной установке в опорах имеет одну степень свободы. Основная стрела установлена на мачте крана поворотно с помощью конструктивно задаваемой поворотной области основной стрелы и имеет одну степень свободы благодаря своей поворотной установке в опорах. Шарнирно-сочлененная стрела поворотно установлена на основной стреле с помощью конструктивно задаваемой поворотной области шарнирно-сочлененной стрелы и благодаря своей поворотной установке в опорах имеет одну степень свободы. Указанная по меньшей мере одна выдвижная стрела установлена с возможностью перемещения в шарнирно-сочлененной стреле с помощью конструктивно задаваемой области поступательного движения и благодаря своей поворотной установке в опорах имеет одну степень свободы. Указанная стреловая система крана рассмотренного вначале рода в соответствии с этим имеет четыре степени свободы. В уровне техники такие стреловые системы известны, например, как избыточные или переопределенные манипуляторы.
Благодаря этому при каждом задании траектории, которой должен следовать оголовок крана при координатном управлении, может быть бесконечно много траекторий шарниров - т.е. опять-таки траекторий, которым должны следовать шарниры этой стреловой системы. Избыток в подвижности из-за переопределенности зачастую используется для того, чтобы, например, оптимизировать характер движения стреловой системы или чтобы обходить препятствия.
При таком управлении обычно после задания желаемой траектории оголовка крана, т.е. после выдачи соответствующей управляющей команды (например, движение оголовка крана в декартовой системе координат) пользователем, процессором или вычислительным блоком крановый контроллер осуществляет так называем обратное преобразование или кинематическое обращение, в результате которого получаются подходящие для желаемой траектории управляющие команды для управления приводными элементами стреловой системы (например, движение стреловой системы в соответствии со степенями свободы шарниров). Чтобы получить однозначное решение для такого обратного преобразования для переопределенной стреловой системы, это обратное преобразование для генерирования управляющих команд для стреловой системы должно происходить с привлечением критериев оптимизации (как, например, так называемых стоимостных функций с весовыми матрицами) и при необходимости с приближениями, и это сопряжено с большими вычислительными затратами. При происходящем таким образом управлении стреловой системой у оператора могут получаться движения стреловой системы крана, которые не являются непосредственно прогнозируемыми.
Задача данного изобретения состоит в том, чтобы предложить кран с крановым контроллером, который предназначен для того, чтобы в рабочем режиме осуществлять координатное управление стреловой системой, а также предложить транспортное средство с таким краном, в котором оператор может оказывать влияние на движение стреловой системы, чтобы избежать непредвиденных движений, и в котором уменьшается сложность расчета обратного преобразования.
Эта задача решается посредством крана с признаками независимого пункта 1 формулы изобретения и посредством транспортного средства с таким краном. Предпочтительные варианты выполнения данного изобретения охарактеризованы в зависимых пунктах формулы.
В предлагаемом изобретением кране предусмотрено, что крановый контроллер имеет пользовательский интерфейс, причем этот пользовательский интерфейс имеет по меньшей мере одну выбираемую пользователем функцию, посредством которой в режиме работы координатного управления ограничивается или ограничена по меньшей мере одна из степеней свободы.
За счет ограничения по меньшей мере одной из степеней свободы стреловой системы в режиме работы координатного управления могут предотвращаться непрогнозируемые движения этой стреловой системы и может существенно снижаться сложность расчета обратного преобразования.
Движения стреловой системы могут стать более предсказуемыми для пользователя за счет ограничения по меньшей мере одной из степеней свободы с помощью указанной по меньшей мере одной выбираемой пользователем функции. Так, например, пользователь путем выбора соответствующей функции может целенаправленно ограничивать и/или исключать степени свободы движения стреловой системы, которые он не хотел бы задействовать в движениях стреловой системы в режиме работы координатного управления.
Благодаря тому, что пользователь может выбрать по меньшей мере одну функцию для ограничения по меньшей мере одной из степеней свободы стреловой системы, движения этой стреловой системы могут целенаправленно подстраиваться под запланированный процесс подъема. Пользователю может предоставляться возможность взаимодействия с краном, благодаря чему пользователь может влиять на характер работы крана.
В одном варианте выполнения данного изобретения благодаря этому пользователю может быть предоставлена возможность выбора задействованных в координатном управлении стрел стреловой системы. В одной модификации этого варианта выполнения данного изобретения пользователь может к тому же получить возможность отдавать предпочтение или определять приоритет среди различных комбинаций из задействованных в координатном управлении стрел стреловой системы.
Благодаря тому, что предусмотрен пользовательский интерфейс, пользователь легко может сделать выбор указанной по меньшей мере одной функции.
Согласно одному предпочтительному примеру осуществления может быть предусмотрено, что стреловая система дополнительно имеет вторую шарнирно-сочлененную стрелу, которая поворотно установлена на выдвижной стреле с помощью конструктивно задаваемой второй поворотной области шарнирно-сочлененной стрелы и благодаря своей поворотной установке в опорах имеет одну степень свободы, и которая предпочтительно содержит по меньшей мере одну вторую выдвижную стрелу, которая установлена с возможностью перемещения во второй шарнирно-сочлененной стреле с помощью конструктивно задаваемой области поступательного движения второй выдвижной стрелы и благодаря своей поворотной установке в опорах имеет одну степень свободы. Вторая шарнирно-сочлененная стрела расширяет пространство возможного позиционирования оголовка крана и зачастую обозначается как так называемый гусек стрелы «Fly-Jib».
Предпочтительно может быть предусмотрено, что стреловая система дополнительно имеет по меньшей мере одну выдвижную стрелу основной стрелы, которая установлена с возможностью перемещения в основной стреле с помощью конструктивно задаваемой области поступательного движения и благодаря своей поворотной установке в опорах имеет одну степень свободы. Посредством по меньшей мере одной выдвижной стрелы основной стрелы эта основная стрела может быть выполнена телескопической.
В одном предпочтительном варианте выполнения может быть предусмотрено, что на стреловой системе установлено по меньшей мере одно навесное устройство в форме рабочего механизма и/или удлинения стрелы, предпочтительно статичного и при необходимости устанавливаемого под задаваемым углом удлинения стрелы.
Для координатного управления в принципе не является проблемой учитывать в расчетах геометрические данные о навесных устройствах или навесных приспособлениях. Для этого система координатного управления должна лишь обеспечиваться информацией относительно помещенного на стреловой системе навесного устройства (например, информацией относительно набора функций, указания размерности, угловых положений), так что эти сведения могут включаться в расчеты.
Поэтому может быть предусмотрено, что через пользовательский интерфейс информация, предпочтительно информация о наборе функций и/или о размерности, и/или об угловых положениях в отношении по меньшей мере одного навесного устройства может передаваться на крановый контроллер, причем эти сведения могут выбираться из базы данных, сохраненных в запоминающем устройстве кранового контроллера, и/или могут вводиться через пользовательский интерфейс, предпочтительно с помощью маски ввода. Так, например, уже сохраненные в крановом контроллере сведения относительно навесного устройства могут выбираться через меню, или сведения могут вводиться пользователем через маску ввода. Это позволяет правильно конфигурировать состояние настройки крана и осуществлять координатное управление оголовком навесного устройства в режиме работы координатного управления. Чтобы гарантировать состояние настройки крана, может быть предусмотрен запрос на подтверждение. Так, может быть предусмотрено, что пользователь должен подтвердить техническое состояние настройки крана через пользовательский интерфейс посредством того, что выбирается соответствующая функция пользовательского интерфейса.
Предпочтительно может быть предусмотрено, что крановый контроллер предназначен для осуществления координатного управления оголовком крана или одной предварительно заданной или задаваемой точки стреловой системы, или одной установленной точкой, предварительно заданной или задаваемой стреловой системой. В режиме работы координатного управления большей частью осуществляется координатное управление оголовком крана. Но вместо оголовка крана может привлекаться также любая другая точка стреловой системы или установленная стреловой системой точка, для которой проводится координатное управление. Так, на стреловой системе могла бы быть установлена тросовая лебедка, и координатное управление могло бы предприниматься относительно точки крепления тросовой лебедки на стреловой системе или относительно грузового крюка на конце троса тросовой лебедки. За счет этого при одном режиме работы тросовой лебедки может быть предусмотрено, что координатное управление больше не касается самого оголовка крана, но регулирует непосредственно позицию груза на конце троса. Замена координатного управления оголовком крана на координатное управление одной заданной или задаваемой точкой стреловой системы, или одной предварительно заданной или задаваемой установленной стреловой системой точкой может детектироваться крановым контроллером, и оператору предлагается подтвердить эту замену, или он должен это сделать. Может быть также предусмотрено, что эта замена может быть активирована оператором, причем он выбирает соответствующую функцию пользовательского интерфейса.
Поскольку кинематика крана рассмотренного вначале рода, который может являться, соответственно, является для координатного управления переопределенным из-за имеющихся степеней свободы стреловой системы, то для однозначного решения обратного преобразования должны вводиться ограничения и/или требования, чтобы снять или снизить эту переопределенность. При этом подходящим ограничением представляется ограничение степеней свободы стреловой системы.
В одном особенно предпочтительном варианте выполнения может быть предусмотрено поэтому, что за счет указанной по меньшей мере одной выбираемой пользователем функции может ограничиваться или быть ограничена по меньшей мере одна степень свободы стреловой системы, чтобы устранить или снизить статическую неопределенность стреловой системы. За счет устранения статической неопределенности, соответственно, избыточности стреловой системы может быть сильно снижена сложность расчета обратного преобразования, в результате которого получаются подходящие для желаемой траектории управляющие команды для управления приводными элементами стреловой системы.
При этом может быть предусмотрено, что степень свободы поворотной мачты крана для сохранения поворотности мачты крана исключена из набора ограничиваемых или ограниченных степеней свободы. Это целесообразно, в частности, при тех вариантах выполнения системы координатного управления, при которых кран управляется пользователем двумя управляющими элементами (например, джойстиками), причем один из обоих управляющих элементов используется для поворота вокруг вертикальной оси мачты крана, а другой управляющий элемент используется для осуществления горизонтального движения и вертикального движения оголовка крана.
Сохранение поворотности мачты крана может быть желательным, например, если эта степень свободы движения стреловой системы не является избыточной.
Исключение степени свободы поворотной мачты крана для сохранения поворотности мачты крана из набора ограничиваемых или ограниченных степеней свободы может быть предпочтительным, в частности, в тех ситуациях с опиранием крана, в которых ось вращения поворотной мачты крана отклоняется от вертикали.
Предпочтительно может быть предусмотрено, что посредством указанной по меньшей мере одной выбираемой пользователем функции может ограничиваться или ограничена одна степень свободы стреловой системы, или все степени свободы стреловой системы могут ограничиваться или ограничены до двух степеней свободы. При координатном управлении стреловой системой, при котором это координатное управление может предприниматься путем управления основной стрелой, шарнирно-сочлененной стрелой и выдвижной стрелой, достаточным является ограничение одной степени свободы, чтобы устранить или снизить статическую неопределенность стреловой системы, так как после ограничения одной степени свободы остаются как раз две степени свободы, чтобы осуществлять горизонтальное движение и вертикальное движение стреловой системы. Если стреловая система содержит дополнительные стрелы (например, вторую шарнирно-сочлененную стрелу), достаточно ограничения всех степеней свободы этой стреловой системы до двух степеней свободы, чтобы устранить или снизить статическую неопределенность стреловой системы, так как после такого ограничения степеней свободы остаются как раз две степени свободы, чтобы осуществлять горизонтальное движение и вертикальное движение стреловой системы. Другими словами, благодаря этому указанные координатно-управляемые движения стреловой системы осуществляются только двумя стрелами, соответственно, секциями крана или с двумя степенями свободы, вследствие чего эти движения однозначно определены и легче могут отслеживаться пользователем. Кроме того, путем ограничения одной степени свободы или степеней свободы нежелательной стрелы могут предотвращаться непрогнозируемые движения стреловой системы.
Согласно одному особенно предпочтительному варианту выполнения может быть предусмотрено, что крановый контроллер в режиме координатного управления предназначен для того, чтобы для осуществления координатного управления стреловой системой использовать выбор стрел в форме части стрел стреловой системы, причем этот крановый контроллер имеет по меньшей мере один рабочий профиль, в котором по меньшей мере два выбора стрел сохранены или определяются непрерывно в предварительно заданной или задаваемой последовательности от более высокого приоритета к более низкому приоритету, и крановый контроллер предназначен для того, чтобы привлекать выборы стрел, сохраненные в по меньшей мере одном рабочем профиле, в соответствии с его определением приоритета для осуществления координатного управления стреловой системой и управлять, причем посредством указанной по меньшей мере одной выбираемой пользователем функции может быть выбран указанный по меньшей мере один рабочий профиль. Непрерывное определение может происходить во время работы в зависимости от текущего положения стреловой системы или от пригодности выбора стрел для осуществляемого или подлежащего осуществлению подъемного движения.
Предпочтительно может быть предусмотрено, что каждый из по меньшей мере двух выборов стрел состоит из двух стрел стреловой системы.
Под одним из рабочих профилей может пониматься, например, так называемая стандартная приоритизация, которая находит применение всегда в тех случаях, когда специально или целенаправленно не выбирается никакой иной рабочий профиль. В нижеприведенной таблице 1 показан пример такой стандартной приоритизации для крана со стреловой системой, которая дополнительно к основной стреле, шарнирно-сочлененной стреле и выдвижной стреле содержит вторую шарнирно-сочлененную стрелу и вторую выдвижную стрелу. Представленный в таблице рабочий профиль содержит 10 выборов стрел с разной приоритизацией. В таблице приоритизация под номером 1 представляет наивысший приоритет, а приоритизация под номером 10 представляет самый низкий приоритет.
В нижеприведенных таблицах стрелы стреловой системы сокращенно обозначены следующим образом: HA соответствует основной стреле, KA соответствует шарнирно-сочлененной стреле, SA соответствует выдвижной стреле (шарнирно-сочлененной стрелы), JKA соответствует второй шарнирно-сочлененной стреле, JSA соответствует второй выдвижной стреле (второй шарнирно-сочлененной стрелы).
Таблица 1
Согласно одному предпочтительному варианту выполнения может быть предусмотрено, что крановый контроллер предназначен для того, чтобы в зависимости от задаваемого и/или заданного, и/или доминирующего положения стреловой системы привлекать выбор стрел для координатного управления.
Предпочтительно может быть предусмотрено, что крановый контроллер предназначен для того, чтобы привлечение и управление выбором стрел из указанных по меньшей мере двух выборов стрел дополнительно осуществлялось в зависимости от возможности осуществления координатного управления с соответствующим выбором стрел.
Так, например, при использовании представленной в таблице 1 в качестве примера стандартной приоритизации в зависимости от положения стреловой системы и от возможности осуществления координатного управления сначала для координатного управления мог бы привлекаться выбор стрел с приоритизацией 1 (шарнирно-сочлененная стрела и выдвижная стрела). Если желаемое пользователем движение с этим выбором стрел невозможно, то можно было бы привлечь для координатного управления выбор стрел с со следующим, более низким приоритетом, т.е. приоритизацию 2 (основная стрела и выдвижная стрела). Такой алгоритм следовало бы продолжить по приведенным в таблице приоритизациям до тех пор, пока не будет найден выбор стрел, с которым может быть реализовано желаемое пользователем движение.
Может быть также предусмотрено, что в зависимости от имеющихся в наличии стрел, соответственно, секций крана запомнены разные рабочие профили. Так, у крана со стреловой системой, содержащей основную стрелу, шарнирно-сочлененную стрелу, выдвижную стрелу, вторую шарнирно-сочлененную стрелу и вторую выдвижную стрелу, например, может быть запомнен первый рабочий профиль, выборы стрел которого включают в себя только основную стрелу и/или шарнирно-сочлененную стрелу, и/или выдвижную стрелу, и может быть запомнен второй рабочий профиль, выборы стрел которого являются частью всех имеющихся стрел.
Приведенная ниже таблица 2 в качестве примера представляет первый рабочий профиль, а последующая таблица 3 в качестве примера представляет второй рабочий профиль.
Представленный в таблице 2 первый рабочий профиль содержит три выбора стрел с разной приоритизацией. В таблице приоритизация под номером 1 представляет наивысший приоритет, а приоритизация под номером 3 представляет самый низкий приоритет. Приведенный в таблице 3 второй рабочий профиль включает в себя 10 выборов стрел с разной приоритизацией. В таблице приоритизация под номером 1 представляет собой наивысший приоритет, а приоритизация под номером 10 - самый низкий приоритет.
Таблица 2
Таблица 3
С помощью первого рабочего профиля согласно таблице 2 ниже в качестве примера поясняется возможное использование этого рабочего профиля. Если желаемое пользователем движение стреловой системы возможно с выбором стрел с наивысшим приоритетом, т.е. приоритизация 1 (основная стрела и шарнирно-сочлененная стрела), то всегда для осуществления координатного управления стреловой системой используется этот выбор стрел. Если одна стрела этого выбора стрел достигает конечного положения или, в ином случае, блокируется, то применяется выбор стрел с со следующим, более низким приоритетом. Если выбор стрел с приоритизацией 1 снова станет доступен в процессе движения стреловой системы (т.е. желаемое пользователем движение снова было бы возможно с этим выбором стрел), то несмотря на это и дальше будет применяться используемый в настоящее время выбор стрел, чтобы избежать постоянных замен выборов стрел, используемых для осуществления координатного управления. Только при новом запуске движения (после нулевого положения стрелы) или после новой замены выбора стрел вследствие конечного положения или блокировки снова будет приниматься во внимание выбор стрел с приоритизацией 1. Так, при таком использовании первого рабочего профиля согласно таблице 2 может получиться, например, следующая последовательность:
1. начало с выбора стрел с приоритизацией 1 (основная стрела и шарнирно-сочлененная стрела), так как возможны все выборы стрел рабочего профиля, а этот выбор стрел имеет наивысший приоритет,
2. основная стрела достигает конечного положения,
3. переход на следующую возможную приоритизацию, например, выбор стрел с приоритизацией 2 (шарнирно-сочлененная стрела и выдвижная стрел),
4. выбор стрел с приоритизацией 1 (основная стрела и шарнирно-сочлененная стрела) снова доступен, активным остается выбор стрел с приоритизацией 2 (шарнирно-сочлененная стрела и выдвижная стрела),
5. выдвижная стрела достигает конечного положения,
6. если возможно - переход на выбор стрел с приоритизацией 1 (основная стрела и шарнирно-сочлененная стрела), если нет - останов.
Может быть предусмотрено, что эта последовательность из по меньшей мере двух выборов стрел одного рабочего профиля может изменяться. В частности, приоритет может определяться непрерывно.
Представленная ниже таблица 4 в качестве примера показывает еще один рабочий профиль. Он содержит 3 выбора стрел с разной приоритизацией. В таблице приоритизация под номером 1 представляет собой наивысший приоритет, а приоритизация под номером 3 - самый низкий приоритет.
Таблица 4
Дополнительно к использованию показанного в таблице 4 рабочего профиля в поясняемом ниже примере для степеней свободы поворотного движения основной стрелы был установлен заданный угол 20°, например, за счет того, что была выбрана соответствующая функция пользовательского интерфейса для установления заданного угла основной стрелы.
Кран движется в соответствии с координатным управлением с привлечением выборов стрел рабочего профиля согласно таблице 4, и в процессе движения стреловой системы основная стрела оставляет свой заданный угол и находится в положении под углом 50°. Впоследствии, в результате конечного положения или возобновления движения, происходит смена выбора стрел. Два выбора стрел, включающие в себя основную стрелу (т.е. выбор стрел с приоритетом 2 и выбор стрел с приоритетом 3), оцениваются затем крановым контроллером в плане того, может ли заданный угол снова быть достигнут с текущей пользовательской настройкой. В соответствии с этим тот выбор стрел, при котором основная стрела быстрее всего движется снова в свое заданное угловое положение, на некоторое время ставится на первое место (соответственно, получает приоритет под номером 1). При достижении заданного угла основной стрелы поставленный на некоторое время на первое место выбор стрел снова ставится на свою первоначальную позицию согласно таблице 4 (соответственно, снова получает свой первоначальный приоритет).
В одном предпочтительном варианте выполнения может быть предусмотрено, что ограничение указанной по меньшей мере одной степени свободы происходит за счет того, что она может фиксироваться или зафиксирована на предварительно заданном или задаваемом значении, и/или может ограничиваться или ограничена заданным или задаваемым частичным диапазоном, и/или может ограничиваться или ограничена в отношении скорости ее изменения.
Поэтому может быть предусмотрено, что посредством указанной по меньшей мере одной выбираемой пользователем функции может блокироваться по меньшей мере одна стрела стреловой системы. Другими словами, тем самым, по меньшей мере одна стрела стреловой системы на некоторое время может блокироваться, так что эта по меньшей мере одна заблокированная стрела больше не участвует в координатно-управляемом движении стреловой системы и вместо этого остается в своей заблокированной позиции. То, что указанная по меньшей мере одна заблокированная стрела больше не участвует в координатно-управляемом движении стреловой системы не должно, однако, означать, что она остается, например, неподвижной в пространстве, но более того, степень свободы, соответственно, степени свободы этой по меньшей мере одной заблокированной стрелы больше не используются для движения стреловой системы.
Для крана может быть предусмотрено, что пользовательский интерфейс содержит по меньшей мере один управляющий элемент (например, рукоятку вращения, рычаг линейного перемещения или ось многоосевого джойстика) кранового контроллера, и выбор выбираемой функции производится за счет приведения пользователем в действие указанного по меньшей мере одного управляющего элемента.
В принципе может быть предусмотрено, что крановый контроллер в другом рабочем режиме предназначен для того, чтобы осуществлять свободное управление стреловой системой. Это может соответствовать обычной работе с краном, при которой отдельные приводные элементы стреловой системы по отдельности управляются непосредственно пользователем посредством выдаваемых им управляющих команд.
В таком дополнительном рабочем режиме свободное управление стреловой системой может осуществляться с помощью по меньшей мере одного управляющего элемента кранового контроллера, причем соответственно один управляющий элемент предназначен для ввода управляющих команд для движения соответственно одной стрелы стреловой системы в соответствии с одной степенью свободы. Таким образом, для свободного управления стреловой системой, для соответствующего движения одной стрелы стреловой системы в соответствии с ее соответствующей степенью свободы может быть предусмотрен соответственно один управляющий элемент (например, предписанный для этого движения рычаг линейного перемещения или ось многоосевого джойстика).
При этом быть предусмотрено, что путем приведения в действие (например, путем перемещения в определенном направлении) указанного по меньшей мере одного управляющего элемента пользователем, в то время как крановый контроллер находится в режиме работы координатного управления, может быть ограничена или ограничивается привязанная к этому управляющему элементу в описанном выше дополнительном рабочем режиме степень свободы стреловой системы. Такое выделение функции указанного по меньшей мере одного управляющего элемента в дополнительном рабочем режиме для свободного управления стреловой системой в режиме работы координатного управления может привлекаться для выбора ограничения соответствующей степени свободы движения этой стреловой системы.
Аналогично этому может быть предусмотрено, что ограничение может быть снова снято путем соответствующего приведения в действие (например, путем перемещения в противоположном направлении) управляющего элемента.
Так, например, основная стрела (или любая другая стрела стреловой системы) может блокироваться, чтобы упростить для пользователя характер движения. Для блокировки, а также для снятия блокировки одной стрелы может использоваться устройство ввода пользовательского интерфейса, например, кнопка управляемого в режиме меню пользовательского интерфейса или управляющие элементы, например, рычаг пользовательского интерфейса с рычажным управлением. Наряду с устройством ввода для режима координатного управления пользовательский интерфейс кранового контроллера для крана зачастую имеет также отдельный рычаг управления (например, джойстик, например, с двумя ортогональными осями или одноосными рычагами линейного перемещения) для свободного управления стреловой системой в другом рабочем режиме. Рычаги управления, которые в режиме работы координатного управления не применяются для управления стреловой системой, могут использоваться для блокировки, а также для снятия блокировки одной стрелы. Так, например, основная стрела может блокироваться с помощью не используемого в координатном управлении управляющего элемента для движения основной стрелы (например, рычага основной стрелы).
Пользователь может позиционировать основную стрелу в желаемое положение и затем зафиксировать угол основной стрелы. Для этого может быть предусмотрено, что он должен отклонять лишь привязанный к движению основной стрелы управляющий элемент (например, джойстик, например, с двумя ортогональными осями или одноосный рычаг линейного перемещения) в одном направлении и так активировать блокировку движения. Все другие координатно-управляемые движения крана с основной стрелой, шарнирно-сочлененной стрелой и выдвижной стрелой тогда выполняются только с помощью шарнирно-сочлененной стрелы и выдвижной стрелы. Дополнительно может осуществляться визуализация на дисплее кранового контроллера, в котором соответственно охарактеризованы заблокированные стрелы, соответственно, секции крана. Если оператор снова приводит в действие привязанный к движению основной стрелы управляющий элемент (например, в противоположном направлении), то он может очень удобно снова снять блокировку, соответственно, фиксацию основной стрелы. Такая блокировка или фиксация аналогичным образом может происходить для любой другой стрелы, соответственно, любой степени свободы стреловой системы.
В качестве примера основная стрела может быть поднята высоко (например, под 70° - 80°) и после этого заблокирована. Тем самым, движения координатно-управляемого крана будут осуществляться только с помощью шарнирно-сочлененной стрелы и выдвижной стрелы, и таким образом может быть охвачен очень большой диапазон перемещений. Дополнительно тем самым могут предотвращаться столкновения основной стрелы с надстройками на транспортном средстве или грузовике, на котором смонтирован кран, вследствие непредвиденных движений.
Предпочтительно может быть предусмотрено, что за счет ограничения указанной по меньшей мере одной шарнирно-сочлененной стрелы заданным или задаваемым частичным диапазоном, предпочтительно может ограничиваться или ограничен задаваемым или заданным квадрантом, так что шарнирно-сочлененная стрела в режиме работы координатного управления может позиционироваться или позиционирована в перенапряженном наклонном положении над воображаемым продолжением основной стрелы.
Воображаемое продолжение основной стрелы (линия основной стрелы) и проходящая перпендикулярно ей воображаемая линия через поворотную опору шарнирно-сочлененной стрелы на основной стреле (линия поворотной опоры) образуют четыре области, соответственно, квадранта. При этом квадрантом 1 называется область между линией основной стрелы и линией поворотной опоры над линией основной стрелы и в направлении воображаемого продолжения основной стрелы. Квадрантом 2 обозначается область между линией основной стрелы и линией поворотной опоры над линией основной стрелы и в направлении основной стрелы. Квадрантом 3 обозначается область между линией основной стрелы и линией поворотной опоры под линией основной стрелы и в направлении основной стрелы. Квадрантом 4 обозначается область между линией основной стрелы и линией поворотной опоры под линией основной стрелы и в направлении воображаемого продолжения основной стрелы.
Недостатком обычных систем координатного управления является отсутствие однозначного решения для так называемого перенапряжения шарнирно-сочлененной стрелы, при котором шарнирно-сочлененная стрела перемещается из наклонного положения ниже воображаемого продолжения основной стрелы (квадрант 4) в наклонное положение выше воображаемого продолжения основной стрелы (квадрант 1). В частности, в мертвой точке (угол шарнирно-сочлененной оси составляет 0°, т.е. шарнирно-сочлененная стрела расположен точно на прямом продолжении относительно основной стрелы) получается разрыв в расчете.
Одной возможностью было бы перенапряжение шарнирно-сочлененной стрелы с помощью ручного перерегулирования, причем выбирается соответствующая функция пользовательского интерфейса.
Также может быть предусмотрено, однако, что крановый контроллер в режиме работы координатного управления обеспечивает вспомогательную функцию, посредством которой шарнирно-сочлененная стрела при приближении к мертвой точке перемещается, выходя из квадранта 4, в квадрант 1, и степень свободы шарнирно-сочлененной стрелы ограничивается квадрантом 1. Как только шарнирно-сочлененная стрела окажется в квадранте 1, она будет двигаться только в этом квадранте, чтобы расчет был однозначным. Переход от перенапряженного наклонного положения шарнирно-сочлененной стрелы (наклонное положение выше воображаемого продолжения основной стрелы) в наклонное положение ниже воображаемого продолжения основной стрелы может соответственно происходить в обратном порядке. Может быть предусмотрено, что посредством указанной по меньшей мере одной выбираемой пользователем функции может выбираться указанная вспомогательная функция.
В одном примере осуществления данного изобретения может быть предусмотрено, что задаваемый или заданный частичный диапазон меньше или равен 2°, предпочтительно меньше или равен 0,5°, соответственно, меньше или равен 10 см, предпочтительно меньше или равен 2,5 см, и/или скорость изменения меньше или равна 0,2° в секунду, предпочтительно меньше или равна 0,05° в секунду, соответственно, меньше или равна 2 см в секунду, предпочтительно меньше или равна 0,5 см в секунду. Ограничение одной степени свободы стреловой системы может, таким образом, соответствовать сильно замедленному движению одной соответствующей стрелы в соответствии с одной соответствующей степенью свободы. При управлении стреловой системой в режиме работы координатного управления пользователь рассматривает в соответствии с этим ограниченную в своем движении стрелу, соответственно, в соответствии с этим ограниченную степень свободы как, по существу, не задействованную в движении стреловой системы. Таким образом, с точки зрения пользователя, по существу, не происходит никаких непрогнозируемых движений.
Согласно одному предпочтительному варианту выполнения может быть предусмотрено, что крановый контроллер имеет предпочтительно переносной пульт управления, и пользовательский интерфейс выполнен на этом пульте управления. Пульт управления может иметь индикатор и управляющие элементы в форме, например, вращающейся рукоятки, рычага линейного перемещения и переключателя. Управляющие элементы могут служить для навигации управляемого в режиме меню пользовательского интерфейса, для выбора выбираемой пользователем функции или для выдачи пользователем управляющих команд.
Под переносным пультом управления может пониматься автономный пульт оператора, с помощью которого пользователь может, по существу, свободно перемещаться в определенной среде вокруг крана или гидравлического подъемного устройства. Разумеется, между таким пультом управления и краном, соответственно, гидравлическим подъемным устройством может осуществляться обмен данными, соответственно, сведениями, например, по радио и/или через кабельные соединения.
Предпочтительно может быть предусмотрено, что пользовательский интерфейс управляется в режиме меню и/или содержит по меньшей мере один управляющий элемент кранового контроллера. Управляемый в режиме меню пользовательский интерфейс может иметь иерархическую структуру. Возможно, чтобы пункты меню пользовательского интерфейса моделировались и представлялись графически. Управляемый в режиме меню пользовательский интерфейс может позволять пользователю делать выбор различных функций, например, из списка предварительно заданных или задаваемых функций.
Согласно одному предпочтительному варианту выполнения может быть предусмотрено, что крановый контроллер содержит индикатор. Если индикатор кранового контроллера выполнен как сенсорный экран, то пользовательский интерфейс может выполняться непосредственно посредством этого сенсорного экрана. При этом, например, однократным касанием изображенной на индикаторе стрелы крана представленной стреловой системы может быть ограничена соответствующая степень свободы. На индикаторе при этом для визуализации ограничения степени свободы, например, цвет представленной стрелы крана может измениться с белого на черный. При следующем касании стрелы крана ограничение может быть снова снято, и индикатор этой стрелы крана, например, может снова поменяться с черного на белый. Если этот индикатор выполнен не в виде сенсорного экрана или чего-то подобного, то при необходимости управляемый в режиме меню пользовательский интерфейс может управляться через управляющий элемент кранового контроллера. Указанный индикатор может брать на себя функцию статусного индикатора для оператора, по которому на взгляд можно распознавать, какие стрелы крана, соответственно, степени свободы ограничены.
В одном предпочтительном варианте выполнения может быть предусмотрено, что крановый контроллер в другом рабочем режиме предназначен для того, чтобы осуществлять свободное управление стреловой системой на основании вводимых пользователем управляющих команд, причем исходя из режима координатного управления переход на следующий рабочий режим происходит так долго, пока задаваемый или заданный управляющий элемент кранового контроллера, предпочтительно аварийный блокиратор кранового контроллера остается приведенным в действие пользователем. Таким образом, у пользователя есть возможность на некоторое время переходить из режима координатного управления в следующий рабочий режим для свободного управления стреловой системой путем приведения в действие предусмотренного для этого управляющего элемента кранового контроллера. Благодаря этому, например, отдельные стрелы стреловой системы могут целенаправленно и свободно переводиться в желаемую позицию или вручную обходиться препятствия.
В дополнительном рабочем режиме для свободного управления стреловой системой пользователь может свободно изменять геометрию крана, т.е. положение стрел крана по отношению друг к другу в одной плоскости, соответственно, относительно мачты крана, и наклонное положение стрел крана с мачтой крана относительно основания крана. Пользователь может, например, путем использования соответствующих управляющих элементов изменять относительное положение стрел крана и поворачивать стрелы крана с мачтой крана относительно основания крана. В фоновом режиме работа крана обычно контролируется устройствами безопасности, которые вмешиваются, когда пользователь управляет элементами управления, приводя к критическому для безопасности состоянию. Например, можно контролировать устойчивость крана.
В принципе может быть предусмотрено, что крановый контроллер имеет несколько рабочих режимов. Так, помимо режима координатного управления и следующего рабочего режима для свободного управления стреловой системой, например, может также иметься рабочий режим - рабочее положение, в котором геометрия крана в заранее заданной последовательности движений может изменяться крановым контроллером, чтобы простым образом привести кран в заданное рабочее положение и/или в заданное парковочное положение. Крановый контроллер может быть также выполнен таким образом, чтобы он запоминал последний использованный рабочий режим перед складыванием крана в его парковочное положение. Так, может быть предусмотрено, что после приведения крана в его рабочее положение с помощью рабочего режима - рабочее положение автоматически происходит переход в режим координатного управления, если перед складыванием крана в его парковочное положение последним был активен режим координатного управления.
Защита испрашивается также для транспортного средства с краном вышеописанного рода. Под транспортным средством может пониматься грузовой автомобиль, а под краном - грузовой кран.
Примеры осуществления данного изобретения рассматриваются далее с привлечением чертежей. На чертежах показано следующее.
Фиг. 1a - Фиг. 1c вид сбоку разных вариантов выполнения крана, смонтированного на транспортном средстве,
Фиг. 2a - Фиг. 2c вид сбоку разных вариантов выполнения крана,
Фиг. 3a - Фиг. 3e вид сбоку в отношении степеней свободы движения различных стрел различных стреловых систем,
Фиг. 4 вариант выполнения крана с изменяемой по длине основной стрелой,
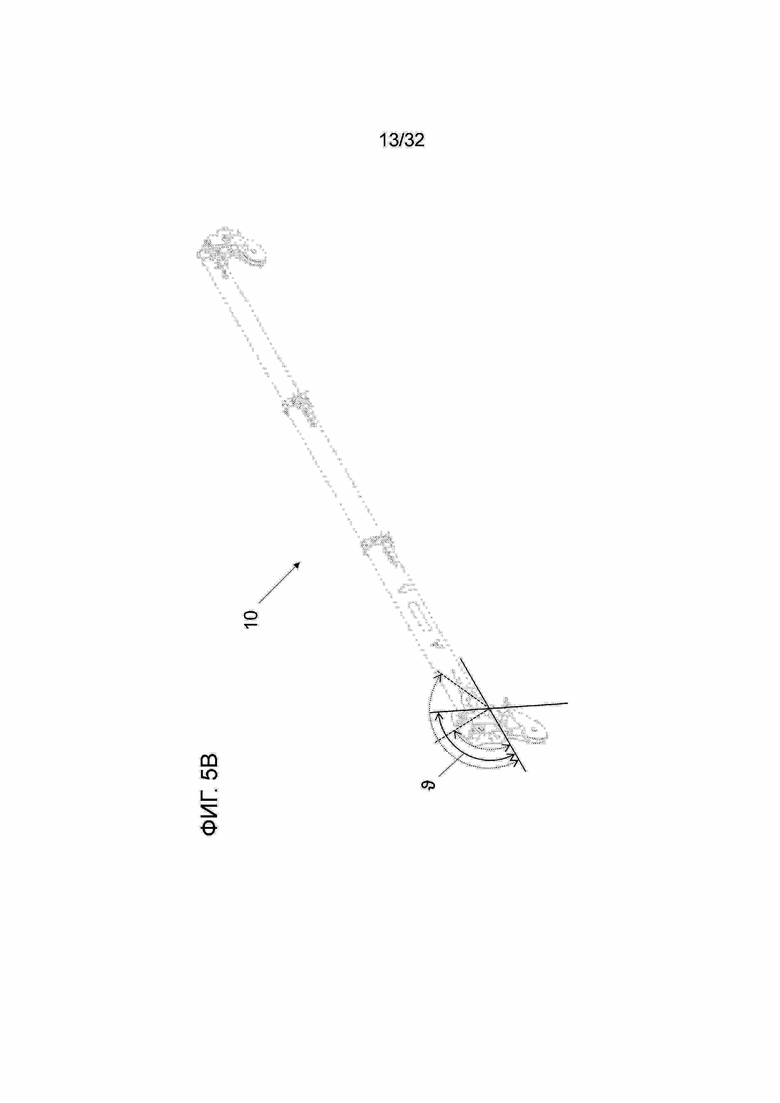
Фиг. 5a и Фиг. 5b два варианта выполнения навесных устройств, устанавливаемых на стреловой системе,
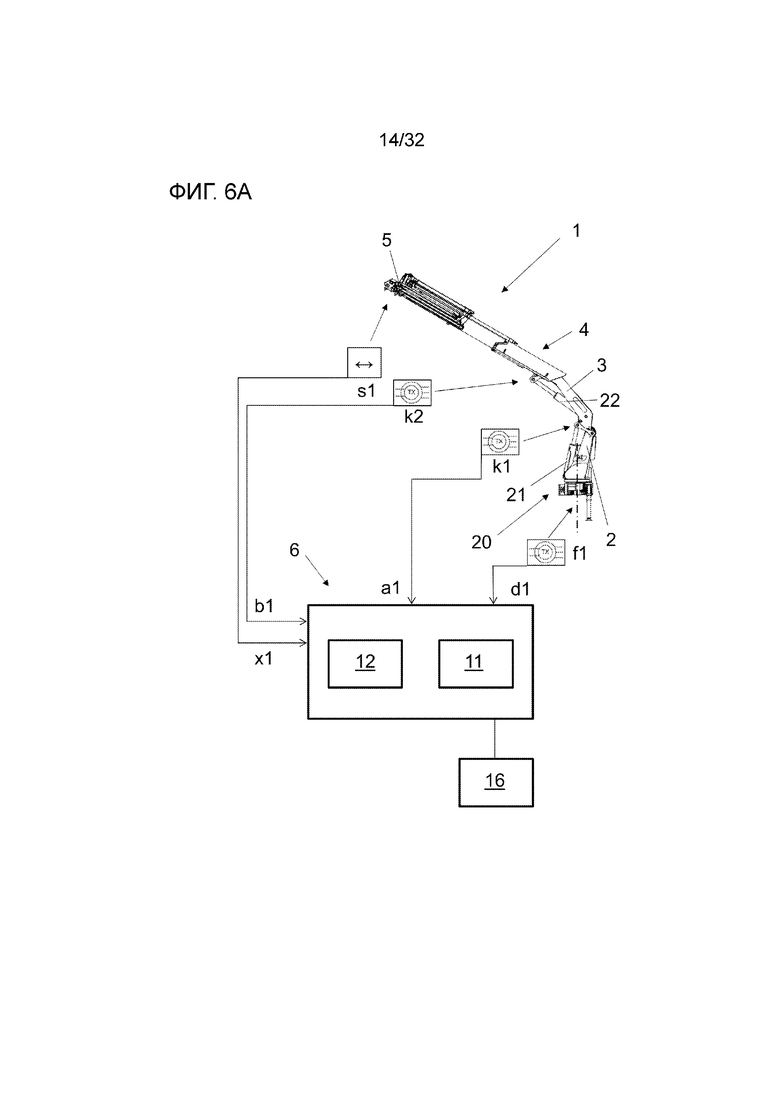
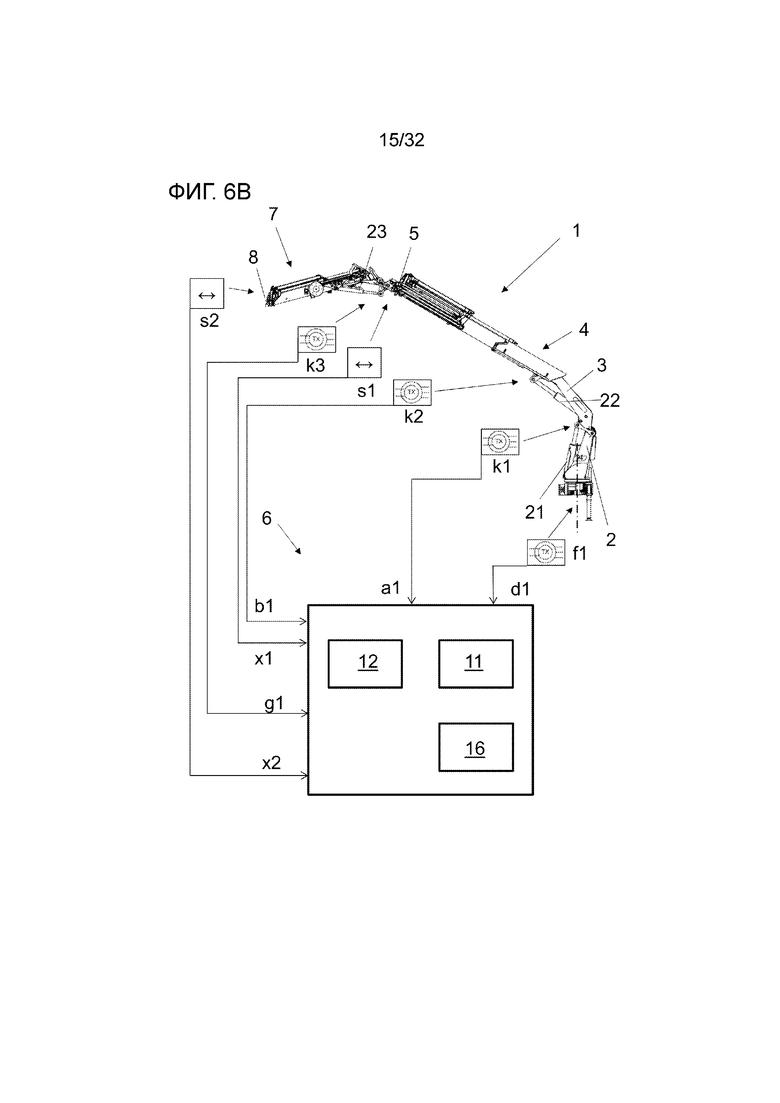
Фиг. 6a и Фиг. 6b вид сбоку разных вариантов выполнения крана и соответствующее схематичное изображение кранового контроллера с сенсорикой,
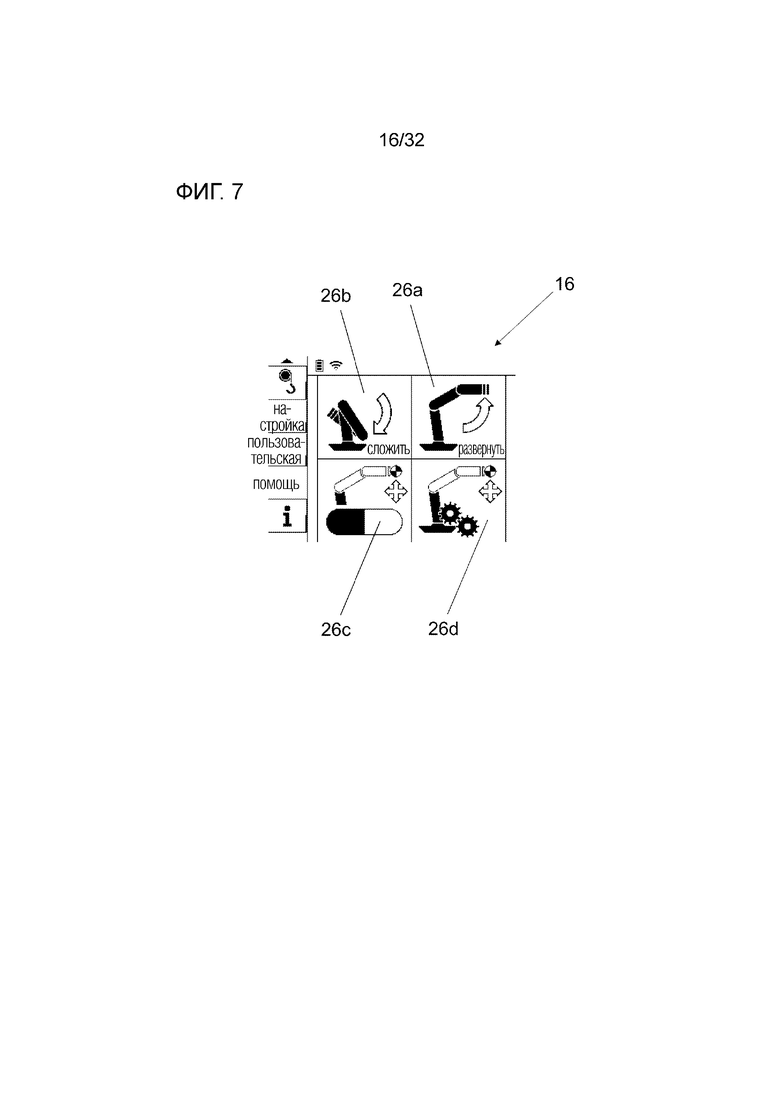
Фиг. 7 приведенный в качестве примера индикатор кранового контроллера предлагаемого крана с показанными на нем возможностями для рабочих режимов,
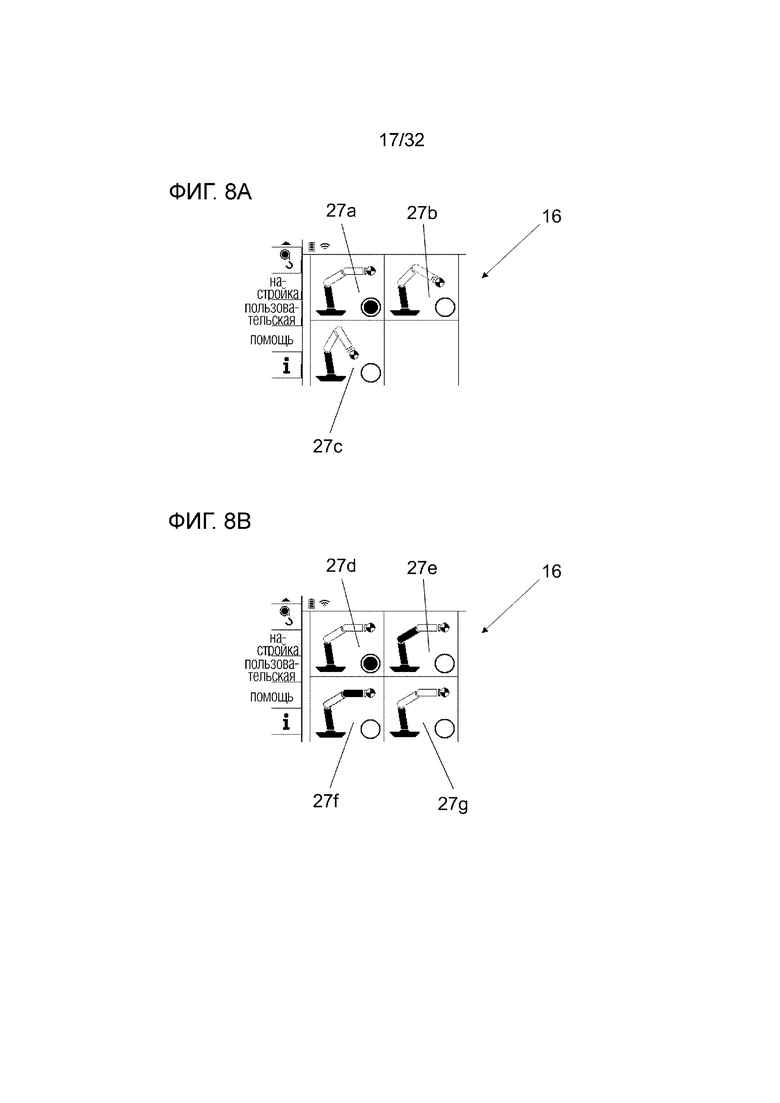
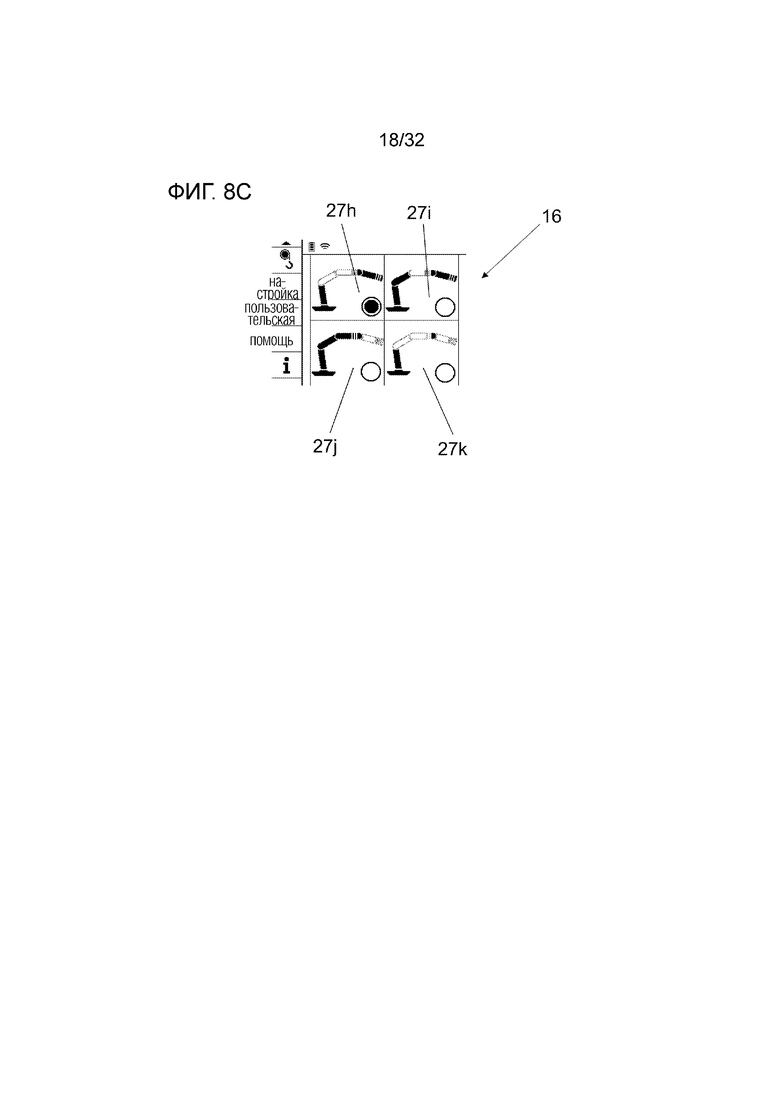
Фиг. 8a - Фиг. 8c показанные в качестве примера варианты выполнения пользовательских интерфейсов,
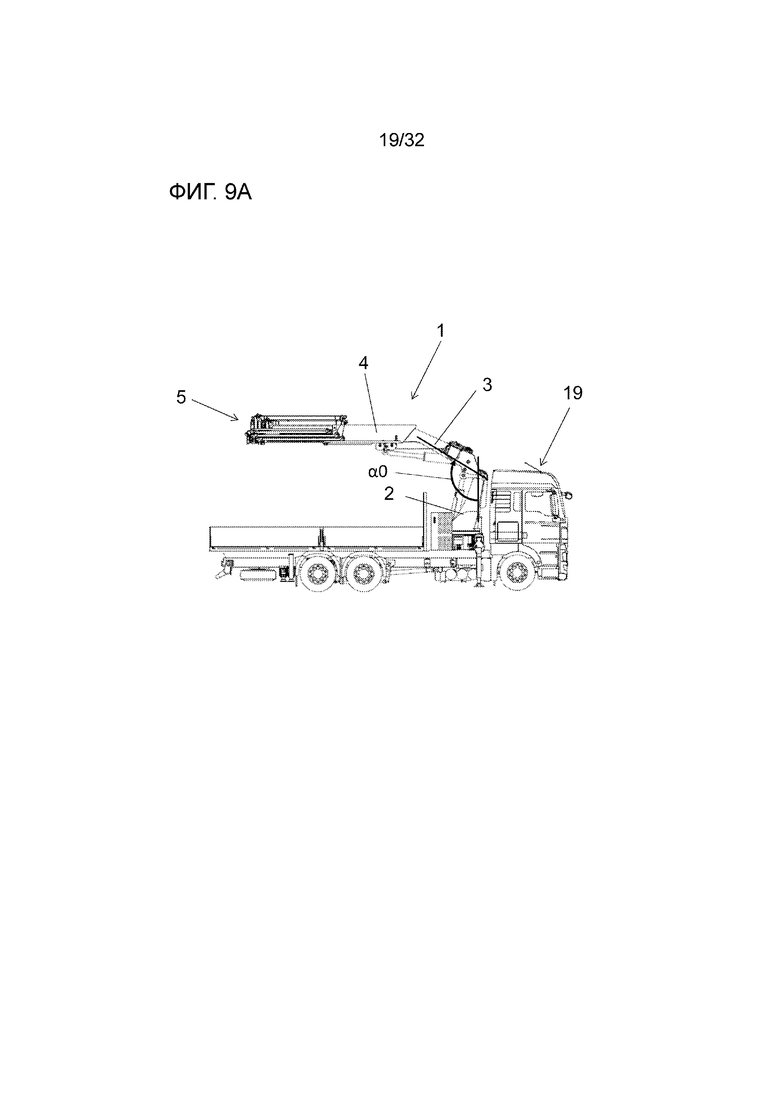
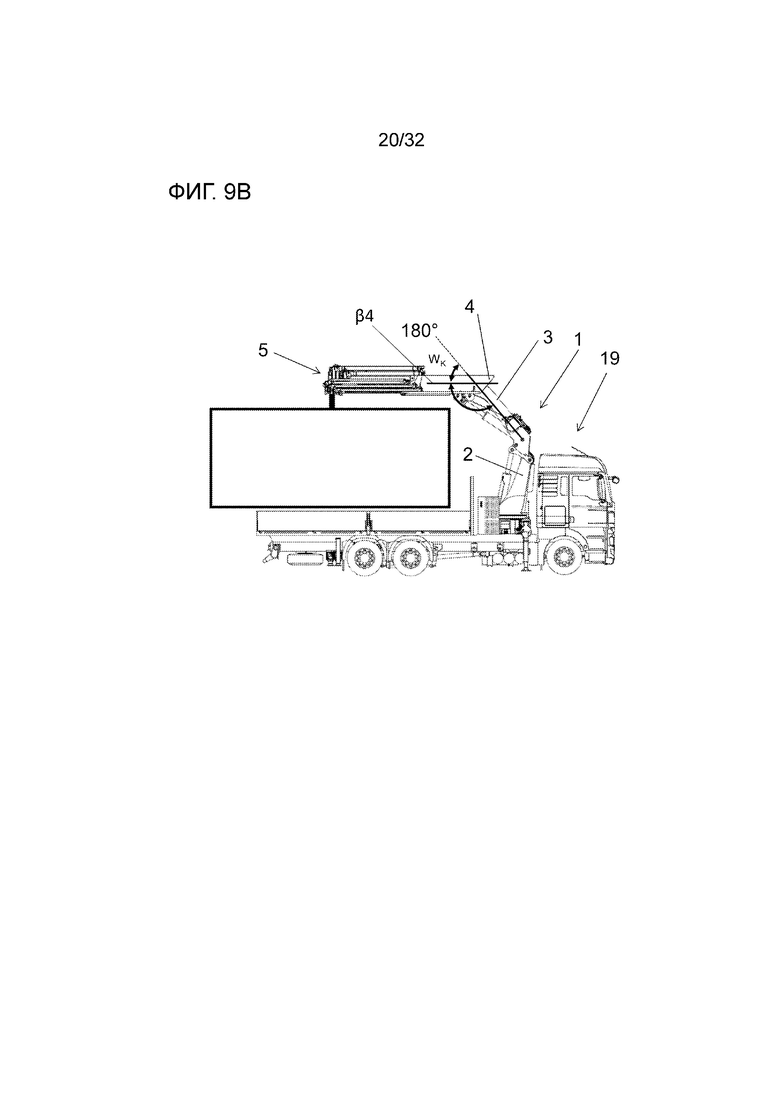
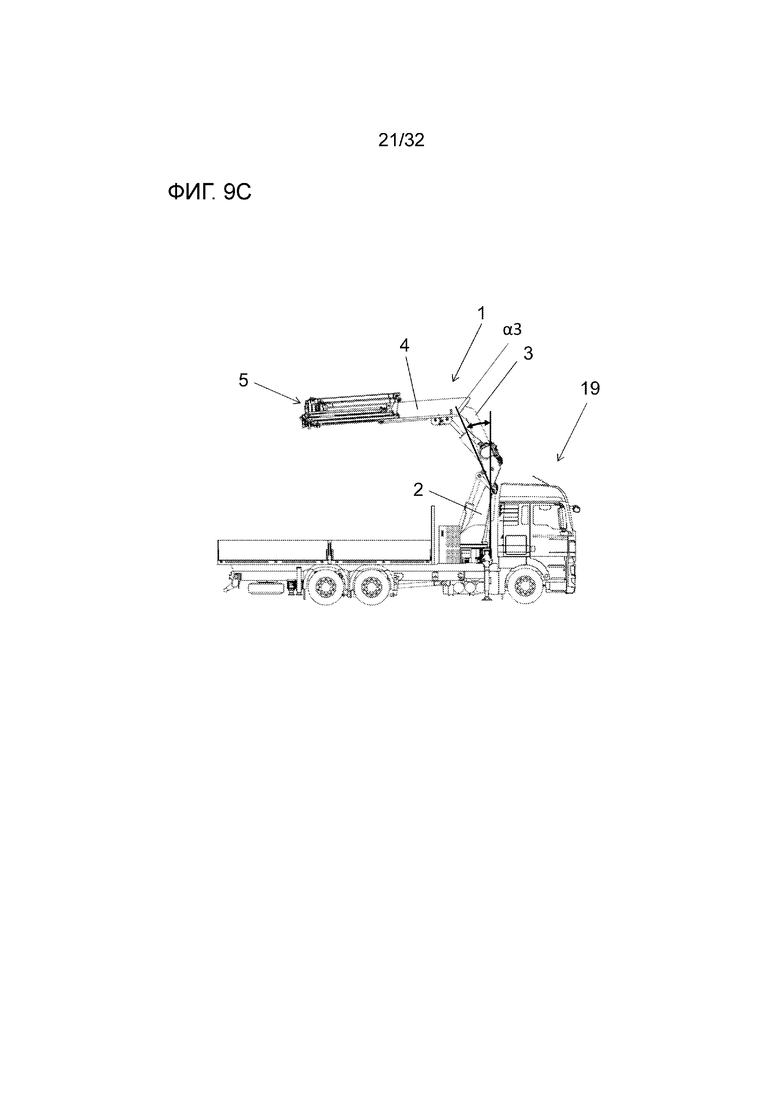
Фиг. 9a - Фиг. 9c возможные варианты применения, которые используются рабочими профилями,
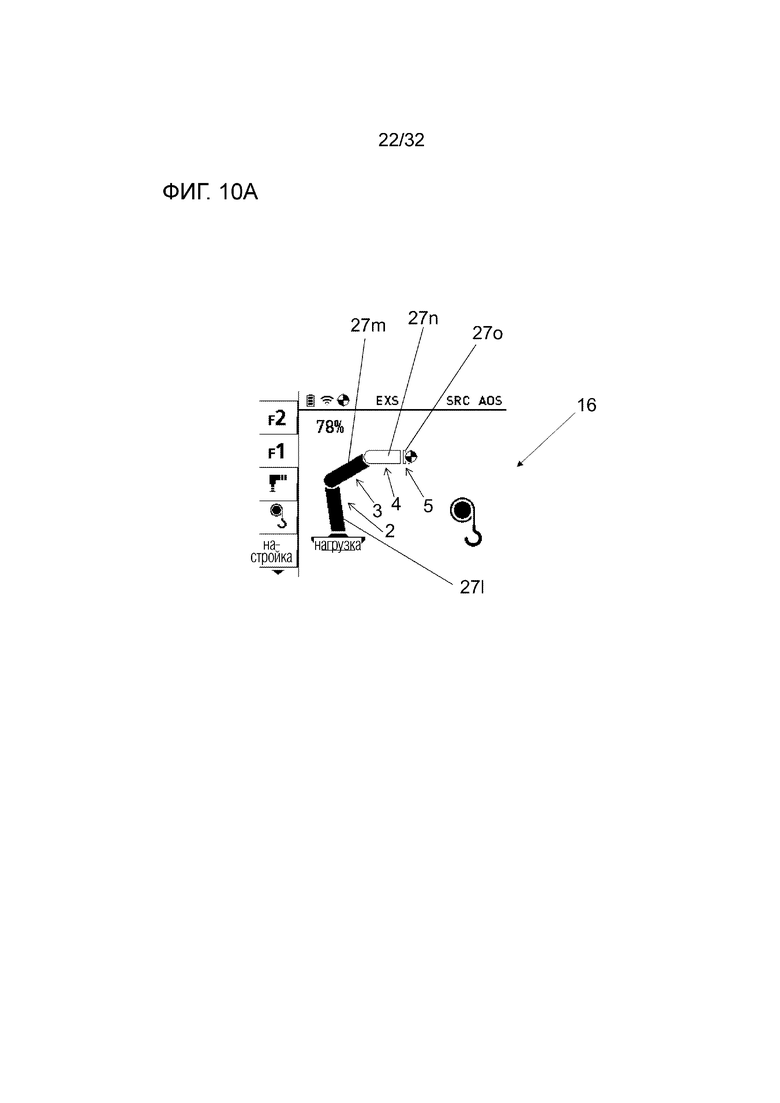
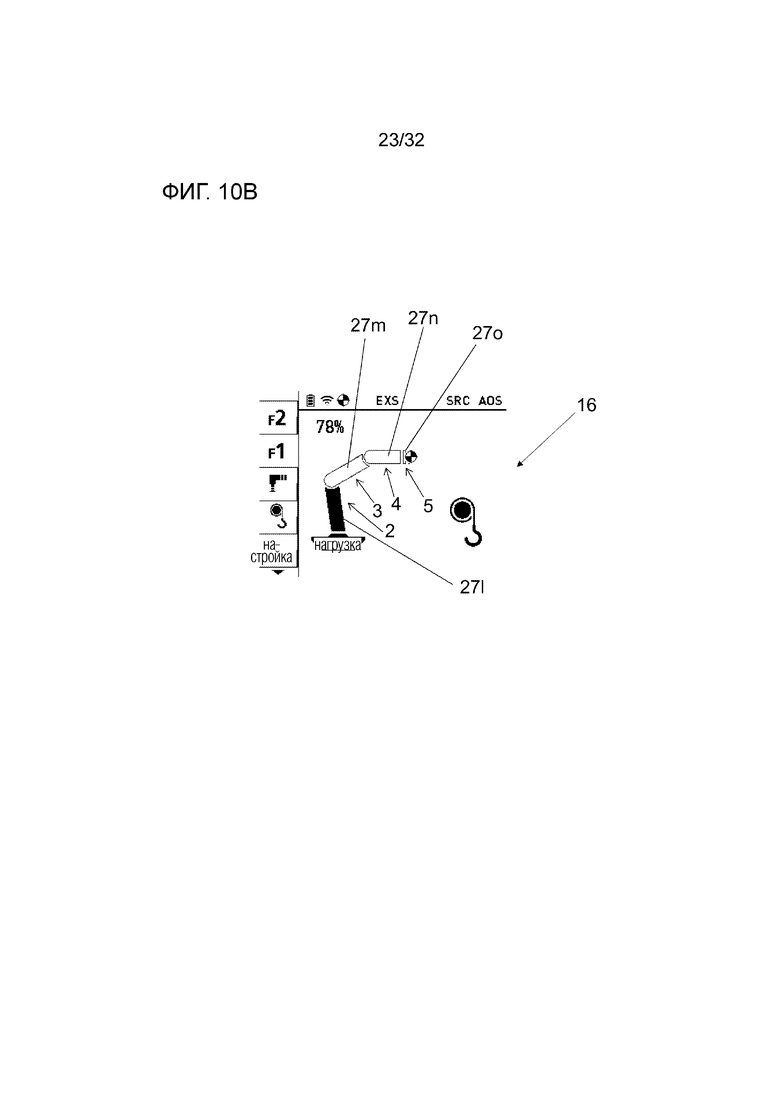
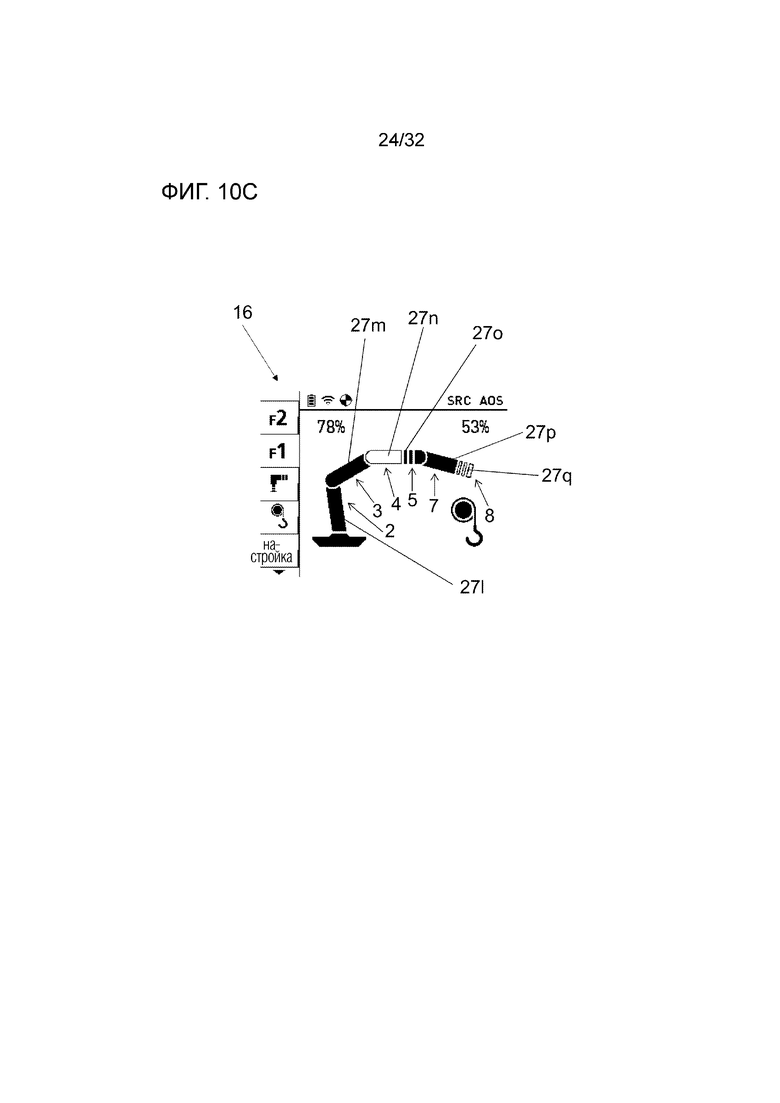
Фиг. 10a - Фиг. 10e варианты выполнения пользовательских интерфейсов,
Фиг. 11a - Фиг. 11d другие варианты выполнения пользовательских интерфейсов и маска ввода,
Фиг. 12 возможное ограничение степени свободы β шарнирно-сочлененной стрелы,
Фиг. 13a индикатор кранового контроллера предлагаемого крана,
Фиг. 13b пульт управления кранового контроллера по Фиг. 13a, и
Фиг. 14 еще один вариант выполнения пользовательского интерфейса.
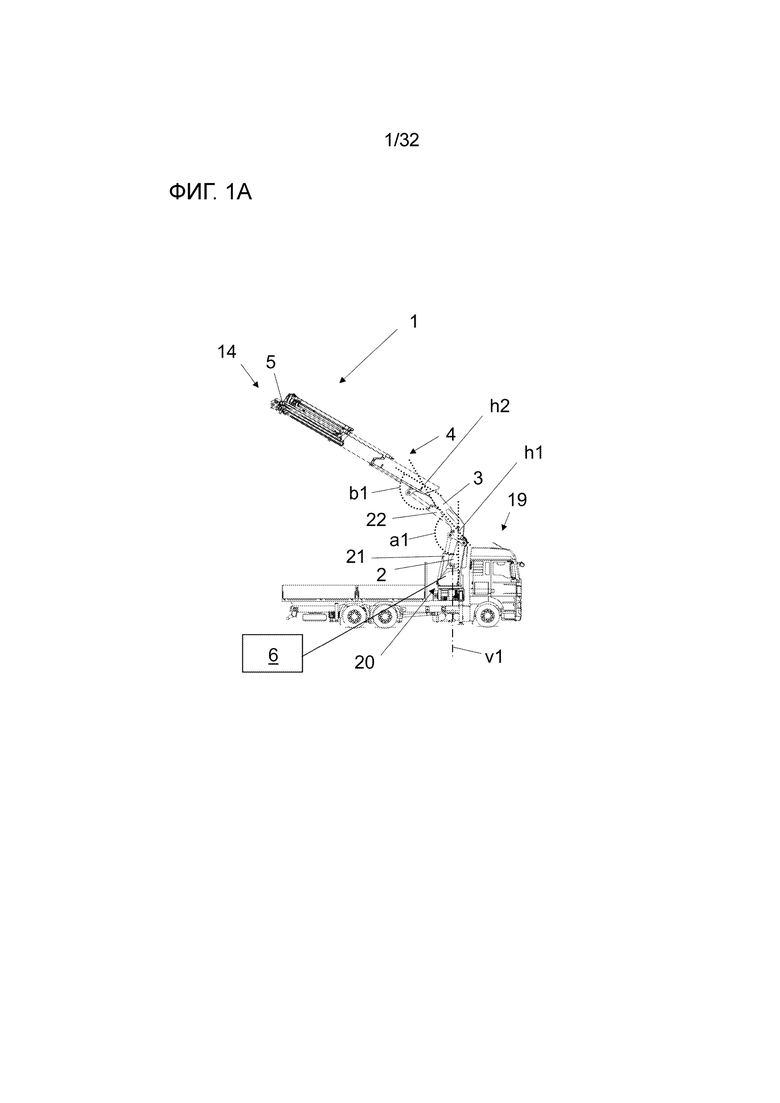
На Фиг. 1a - Фиг. 1c показан вид сбоку разных вариантов выполнения крана 1, смонтированного на транспортном средстве 19. На Фиг. 2a - Фиг. 2c показаны краны 1 по Фиг. 1a - Фиг. 1c в отдельном виде. Степени свободы α, β, φ, γ, L, J, H отдельных стрел 2, 3, 4, 5, 7, 8, 24 разных стреловых систем кранов 1 проиллюстрированы на Фиг. 3a - Фиг. 3e и на Фиг. 4.
На Фиг. 1a показан первый вариант выполнения предлагаемого крана 1, причем этот кран 1 выполнен как грузовой кран, соответственно, кран с шарнирно-сочлененной стрелой и смонтирован на транспортном средстве 19. Кран 1, как показано, имеет мачту 2 крана, установленную с возможностью поворота вокруг первой вертикальной оси v1 с помощью поворотного механизма 20, основную стрелу 3, установленную на мачте 2 крана с возможностью поворота вокруг первой горизонтальной поворотной оси h1, и установленную на основной стреле 3 с возможностью поворота вокруг второй горизонтальной поворотной оси h2 шарнирно-сочлененную стрелу 4 с по меньшей мере одной выдвижной стрелой 5. Для поворачивания основной стрелы 3 относительно мачты 2 крана (представленное угловое положение a1 в сочленении для степени свободы α) предусмотрен гидравлический главный цилиндр 21. Для поворачивания шарнирно-сочлененной стрелы 4 относительно основной стрелы 3 (представленное угловое положение в сочленении b1 степени свободы β) предусмотрен гидравлический цилиндр 22 сочленения. В этом варианте выполнения крана 1 оголовок 14 крана может быть образован оголовком выдвижной стрелы 5.
Стреловая система показанного крана 1 в соответствии с этим имеет мачту 2 крана, основную стрелу 3, шарнирно-сочлененную стрелу 4 и по меньшей мере одну выдвижную стрелу 5.
Кран 1 имеет представленный схематично крановый контроллер 6, который в режиме координатного управления предназначен для того, чтобы осуществлять координатное управление стреловой системой. Указанный крановый контроллер 6 имеет не представленный здесь детально пользовательский интерфейс, причем этот пользовательский интерфейс имеет по меньшей мере одну выбираемую пользователем функцию, с помощью которой в режиме работы координатного управления может ограничиваться или ограничена по меньшей мере одна из степеней свободы α, β, φ, L (см. Фиг. 3a - Фиг. 3e и Фиг. 4).
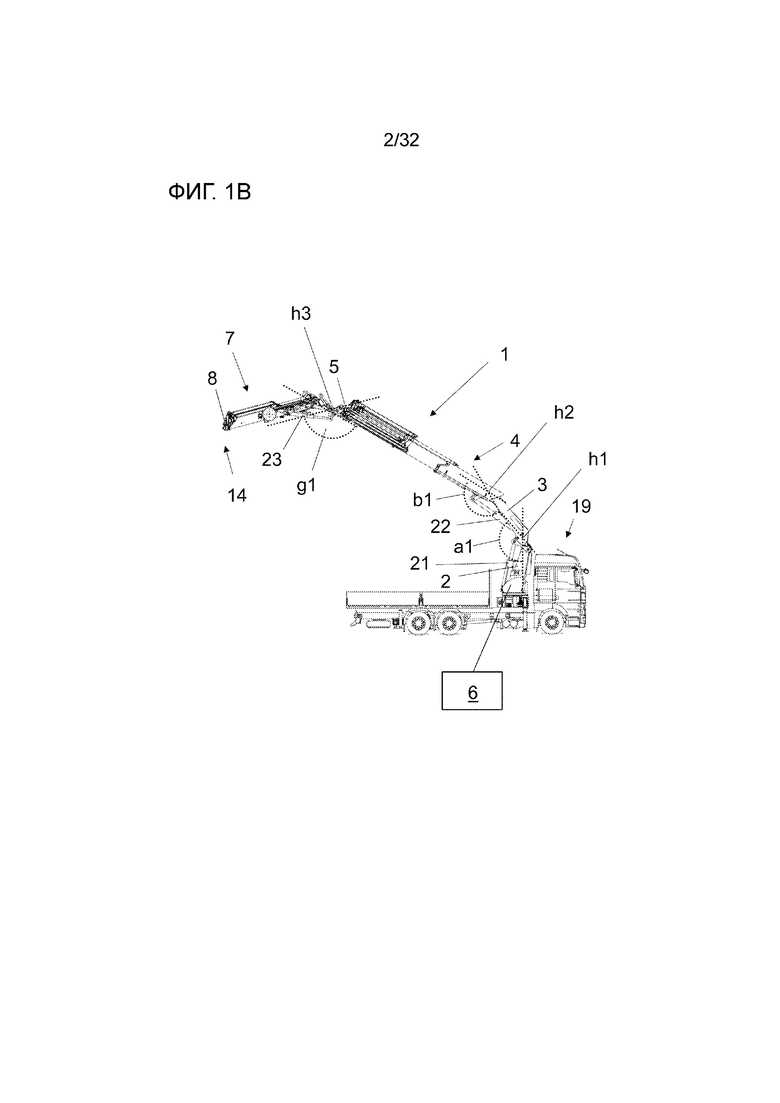
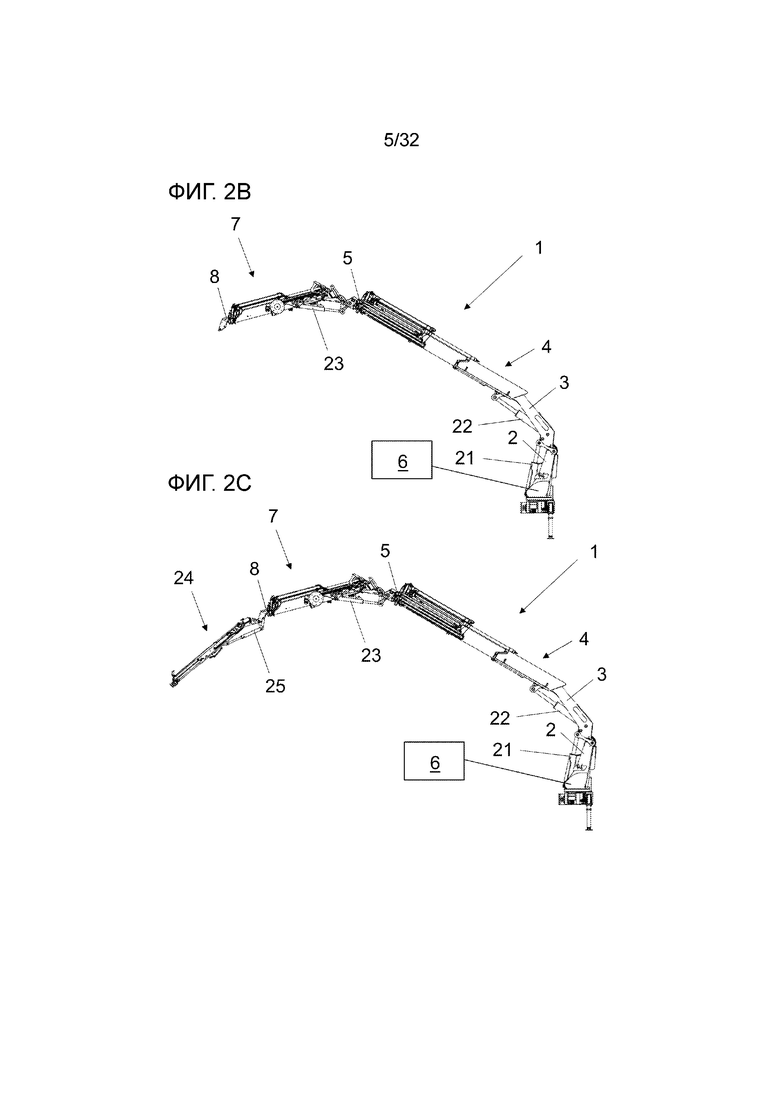
На Фиг. 1b показан второй вариант выполнения предлагаемого крана 1, причем показанный на нем кран 1 дополнительно к показанному на Фиг. 1a варианту выполнения имеет установленную с возможностью вращения вокруг третьей горизонтальной поворотной оси h3 на выдвижной стреле 5 шарнирно-сочлененной стрелы 4 вторую шарнирно-сочлененную стрелу 7 с установленной в ней второй выдвижной стрелой 8. Для поворачивания второй шарнирно-сочлененной стрелы 7 относительно шарнирно-сочлененной стрелы 4 (представленное угловое положение в сочленении g1 для степени свободы γ) предусмотрен цилиндр сочленения 23. В этом варианте выполнения крана 1 оголовок 14 крана может быть образован оголовком выдвижной стрелы 8.
Стреловая система показанного на Фиг. 1b крана 1 в соответствии с этим имеет мачту 2 крана, основную стрелу 3, шарнирно-сочлененную стрелу 4 с по меньшей мере одной выдвижной стрелой 5, а также вторую шарнирно-сочлененную стрелу 7 с по меньшей мере одной выдвижной стрелой 8.
Аналогично варианту выполнения Фиг. 1b для показанного на Фиг. 1b крана 1 в режиме работы координатного управления с помощью выбираемой пользователем функции может ограничиваться или ограничена одна из степеней свободы α, β, φ, γ, L, J (см. Фиг. 3a - Фиг. 3e и Фиг. 4).
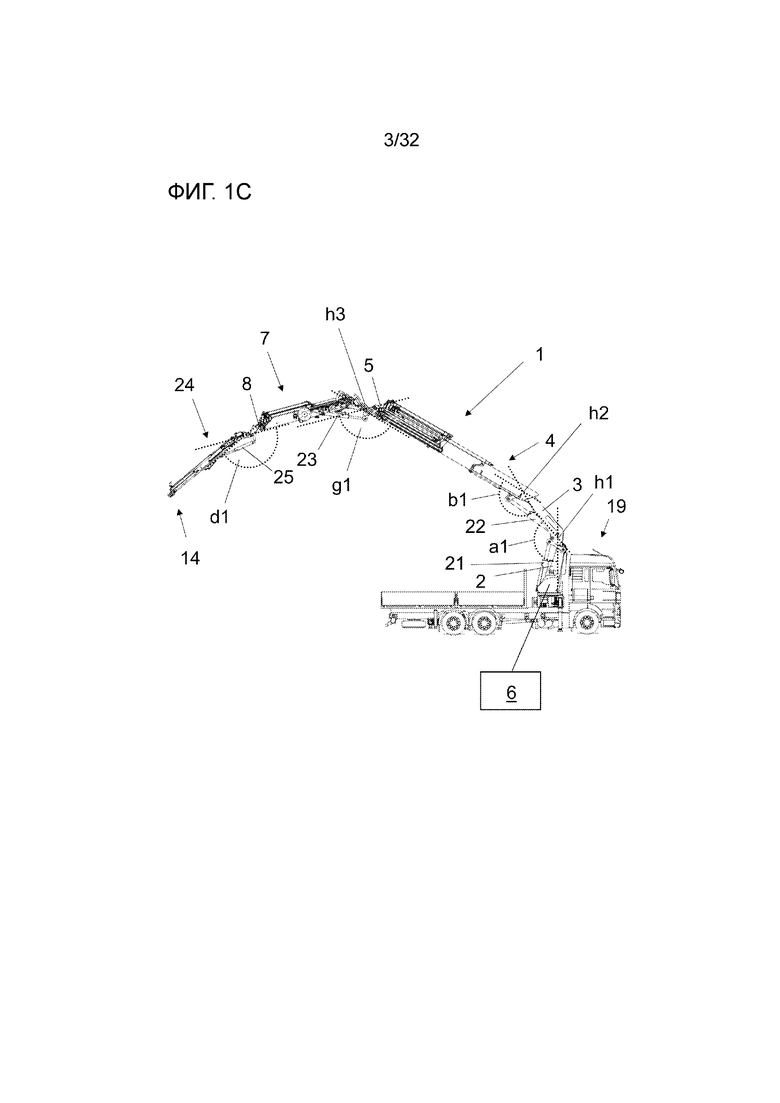
На Фиг. 1c показан тритий вариант выполнения предлагаемого крана 1, причем показанный там кран 1 дополнительно к конфигурации показанного на Фиг. 1b варианта выполнения имеет еще одну шарнирно-сочлененную стрелу 24, помещенную с возможностью поворота вокруг четвертой горизонтальной поворотной оси a4 на второй выдвижной стреле 8 второй шарнирно-сочлененной стрелы 7. Для поворачивания этой дополнительной шарнирно-сочлененной стрелы 24 относительно второй шарнирно-сочлененной стрелы 7 (представленное угловое положение в сочленении d1 для степени свободы поворотного движения дополнительной шарнирно-сочлененной стрелы 24) предусмотрен цилиндр 25 сочленения. В этом варианте выполнения крана 1 оголовок 14 крана может быть образован оголовком дополнительной шарнирно-сочлененной стрелы 24.
Стреловая система показанного на Фиг. 1c крана 1 в соответствии с этим имеет мачту 2 крана, основную стрелу 3, шарнирно-сочлененную стрелу 4 с по меньшей мере одной выдвижной стрелой 5, вторую шарнирно-сочлененную стрелу 7 с по меньшей мере одной выдвижной стрелой 8, а также дополнительную шарнирно-сочлененную стрелу 24 (которая при необходимости может быть выполнена изменяемой по длине).
Аналогично вариантам выполнения по Фиг. 1a и Фиг. 1b для показанного на Фиг. 1c крана 1 в режиме работы координатного управления с помощью выбираемой пользователем функции может ограничиваться или ограничена по меньшей мере одна из степеней свободы α, β, φ, γ, L, J (см. Фиг. 3a - Фиг. 3e и Фиг. 4), а также степень свободы поворотного движения дополнительной шарнирно-сочлененной стрелы 24.
Все показанные варианты выполнения могут иметь, разумеется, поворотный механизм 20.
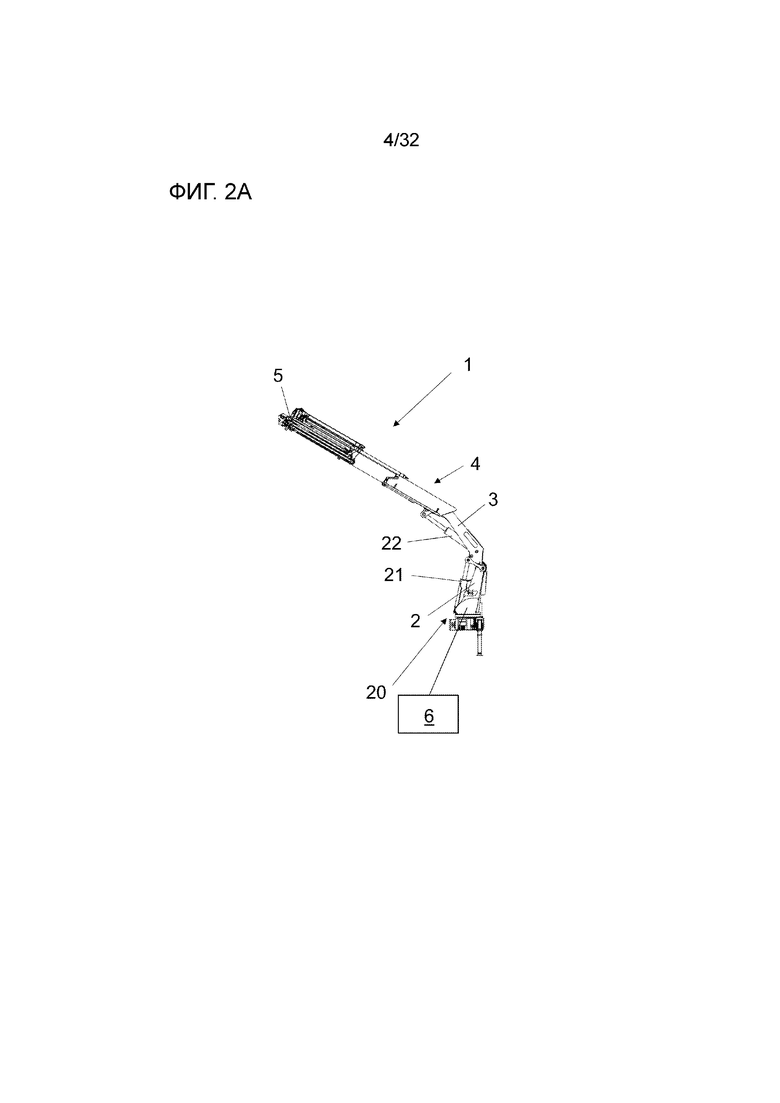
На Фиг. 2a - Фиг. 2c соответственно показан подробный вид крана 1, выполненного согласно Фиг. 1a - Фиг. 1c.
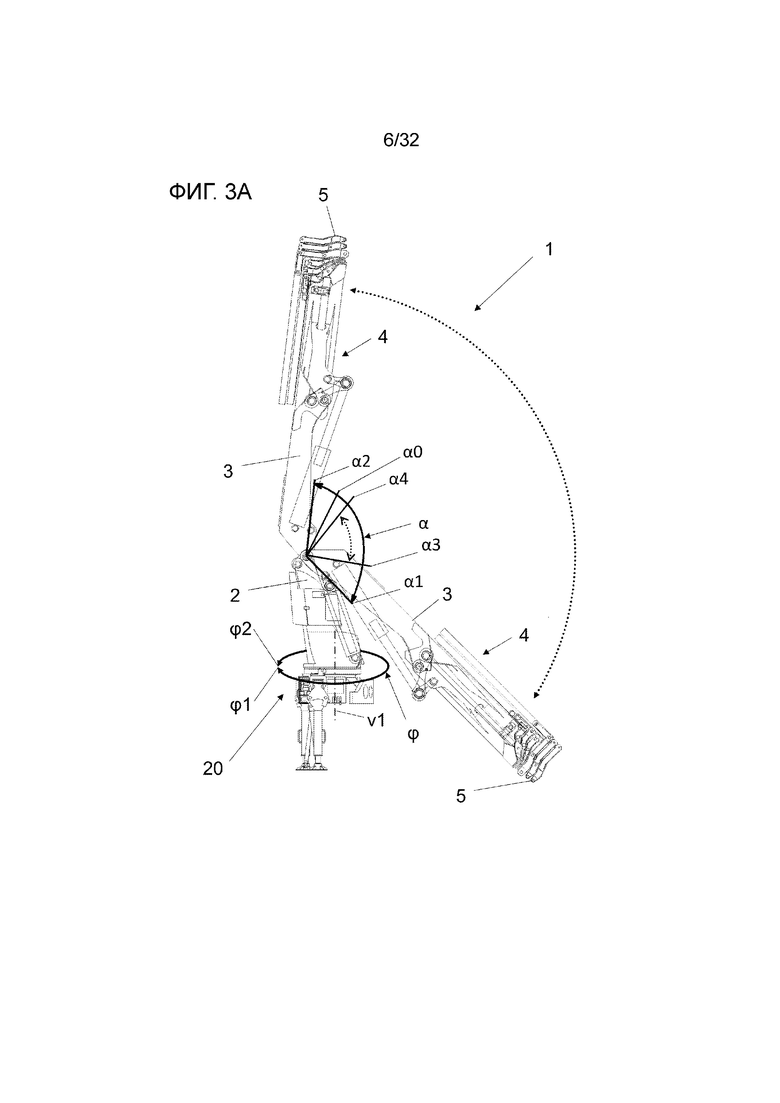
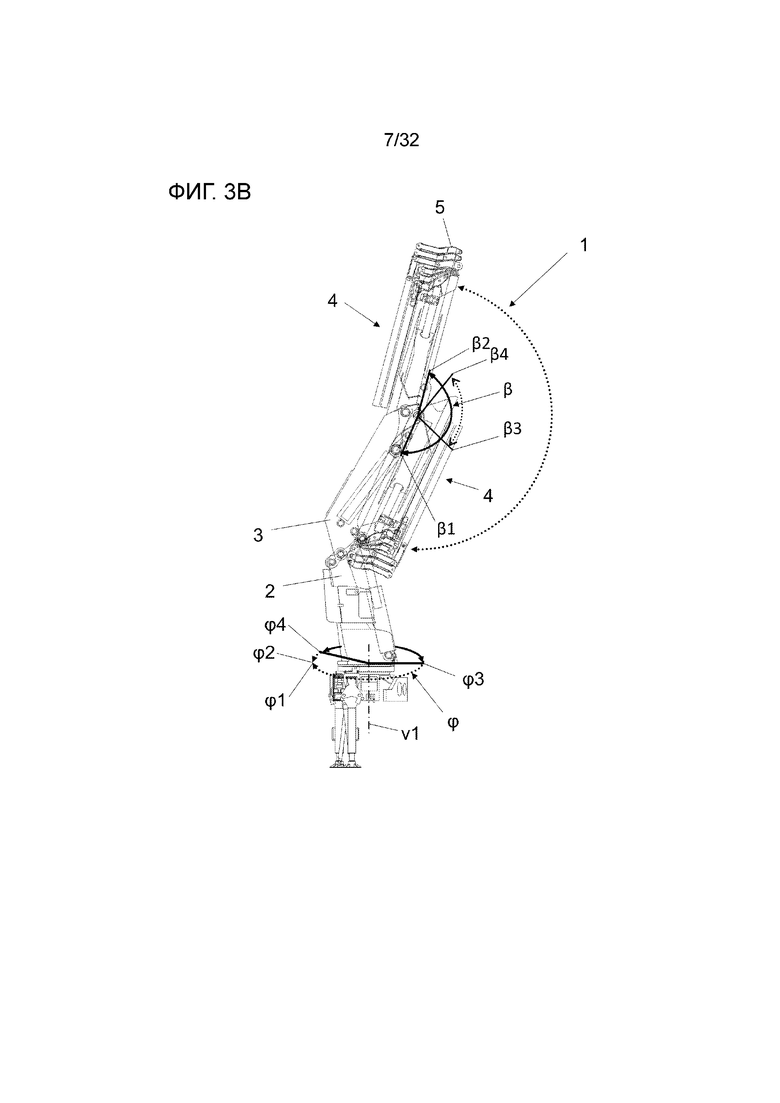
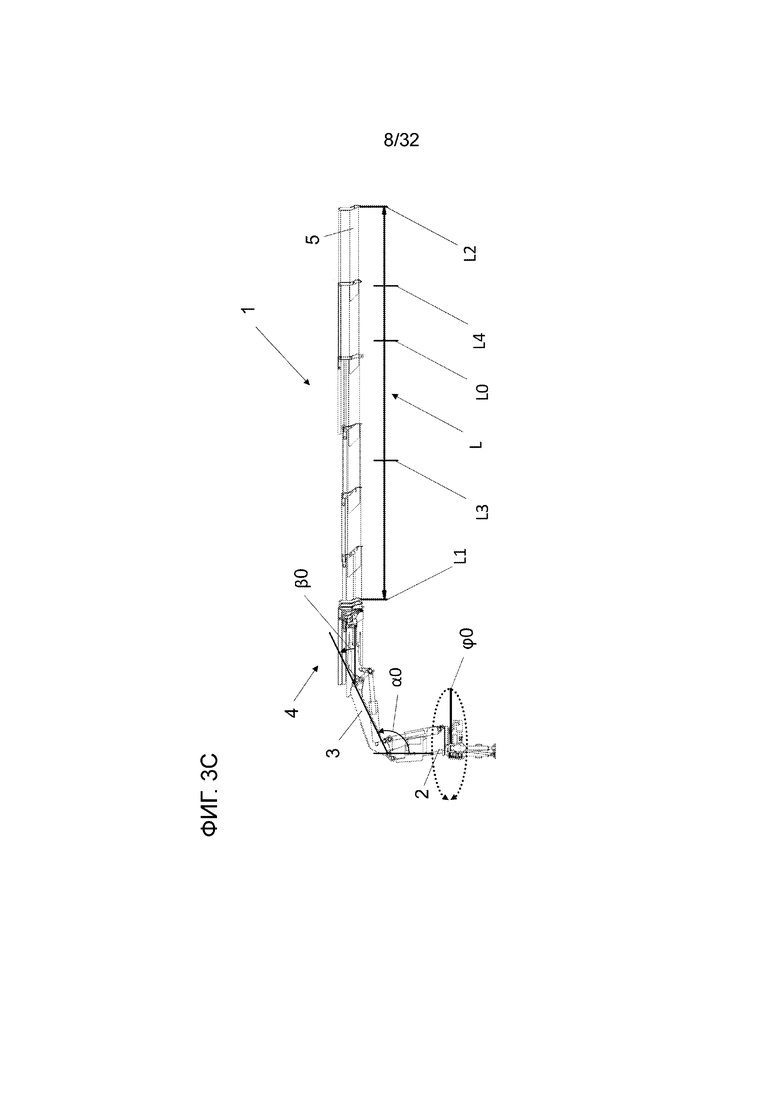
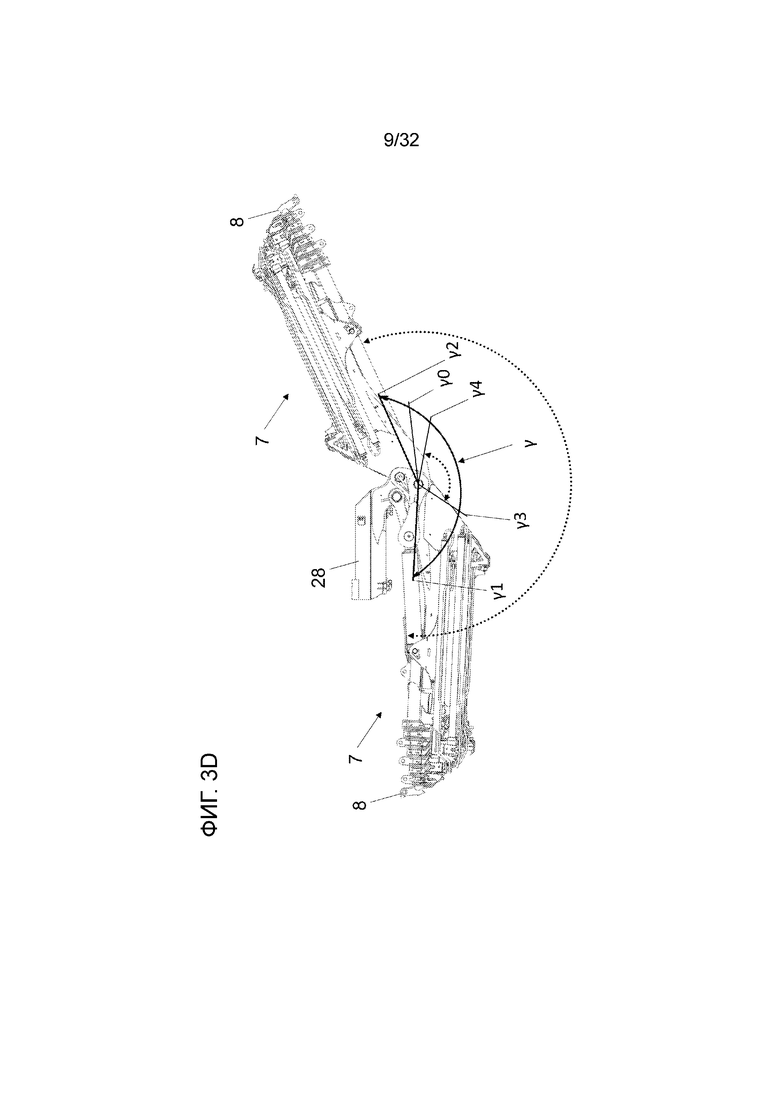
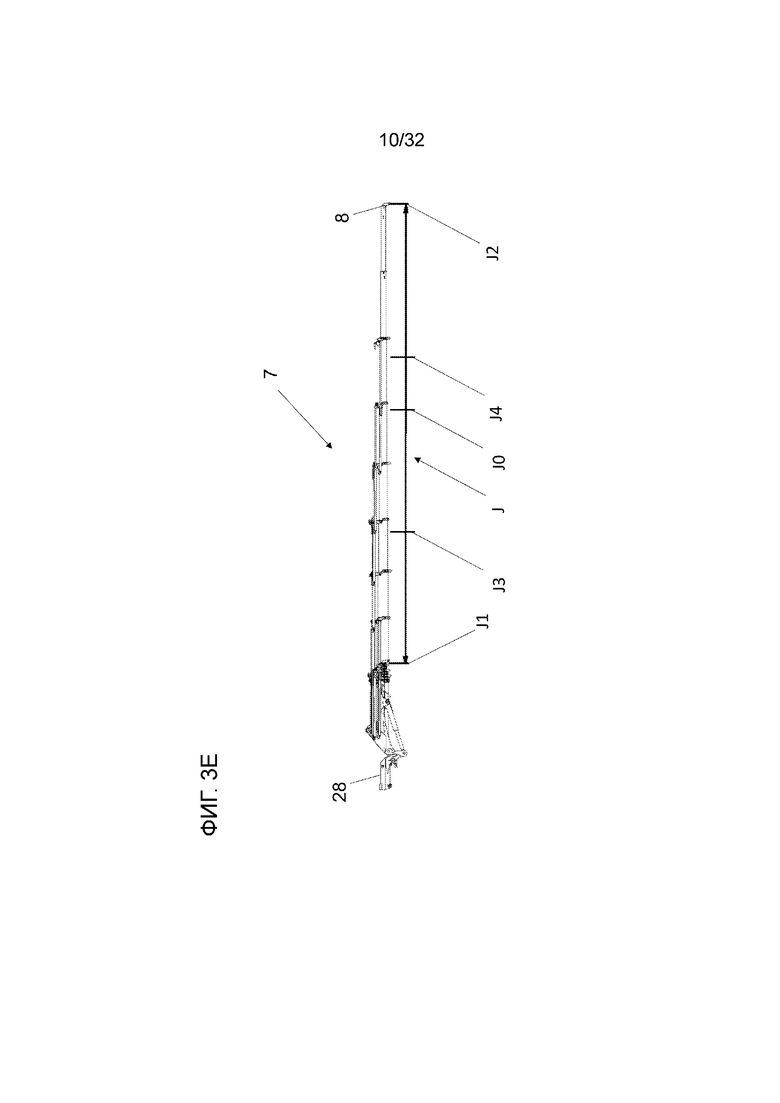
На Фиг. 3a - Фиг. 3e на виде сбоку проиллюстрированы степени свободы α, β, φ, γ, L, J движения различных стрел различных стреловых систем.
Показанный на Фиг. 3a - Фиг. 3c кран 1 соответствует варианту выполнения по Фиг. 1c и Фиг. 2a. Показанная на Фиг. 3e и Фиг. 3b шарнирно-сочлененная стрела 7 соответствует показанной на Фиг. 1b и Фиг. 2b второй шарнирно-сочлененной стреле 7. Дополнительная шарнирно-сочлененная стрела 24 по Фиг. 1c и Фиг. 2c тоже может быть выполнена соответственно показанной на Фиг. 3e и Фиг. 3b шарнирно-сочлененной стреле 7.
Как показано на Фиг. 3a - Фиг. 3c, мачта 2 крана с помощью конструктивно задаваемой поворотной области мачты крана φ1 - φ2 установлена с возможностью вращения вокруг оси вращения в виде первой вертикальной оси v1 и благодаря своей поворотной установке в опорах имеет одну степень свободы φ. Возможно, что диапазон поворота мачты крана покрывает интервал от 0° до 360°, т.е. мачта крана выполнена неограниченно поворотной. Основная стрела 3 установлена поворотно на мачте 2 крана с помощью конструктивно задаваемой поворотной области основной стрелы α1 - α2 и благодаря своей поворотной установке в опорах имеет степен свободы α. Шарнирно-сочлененная стрела 4 поворотно установлена на основной стреле 3 с помощью конструктивно задаваемой поворотной области шарнирно-сочлененной стрелы β1 - β2 и благодаря своей поворотной установке в опорах имеет степень свободы β. Выдвижная стрела 5 установлена с возможностью перемещения в шарнирной стреле 4 с помощью конструктивно задаваемой области поступательного движения L1 - L2 и благодаря своей поворотной установке в опорах имеет степень свободы L.
На Фиг. 3d и Фиг. 3e отдельно показана шарнирно-сочлененная стрела 7, которая посредством соединительной области 28 может быть поворотно установлена на выдвижной стреле 5 крана 1 по Фиг. 3a - Фиг. 3c с помощью конструктивно задаваемой второй поворотной области шарнирно-сочлененной стрелы γ1 -γ2 и благодаря поворотной установке в опорах имеет степень свободы γ, и которая содержит по меньшей мере одну вторую выдвижную стрелу 8, которая установлена с возможностью перемещения во второй шарнирной стреле 7 с помощью конструктивно задаваемой области поступательного движения второй выдвижной стрелы J1 - J2 и благодаря своей поворотной установке в опорах имеет степень свободы J.
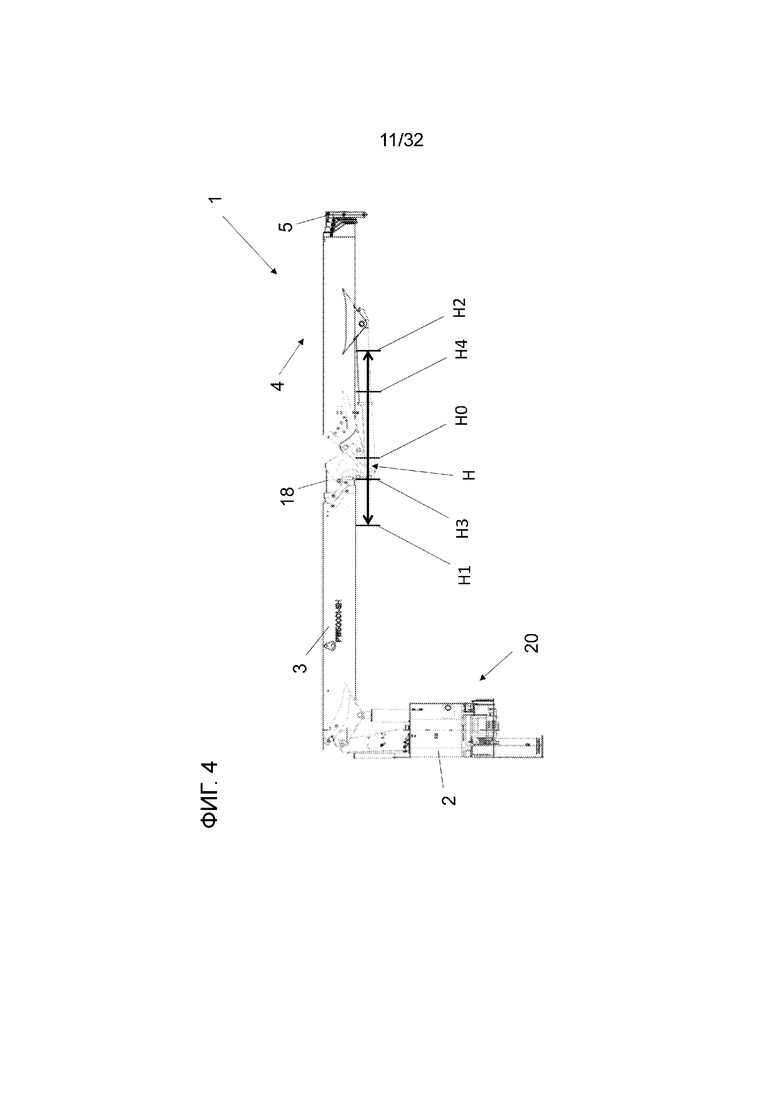
На Фиг. 4 показан вариант выполнения крана 1, стреловая система которого в отличие от рассмотренных ранее вариантов выполнения дополнительно имеет по меньшей мере одну выдвижную стрелу 18 основной стрелы, которая установлена с возможностью перемещения в основной стреле 3 посредством конструктивно задаваемой (и представленной лишь схематично) области поступательного движения H1 - H2 и благодаря своей поворотной установке в опорах имеет степень свободы H.
Стреловая система показанного на Фиг. 4 крана 1 в соответствии с этим имеет мачту 2 крана, основную стрелу 3 с по меньшей мере одной выдвижной стрелой 18 основной стрелы, шарнирно-сочлененную стрелу 4 с по меньшей мере одной выдвижной стрелой 5.
Аналогично рассмотренным ранее вариантам выполнения для показанного на Фиг. 4 крана 1 в режиме работы координатного управления с помощью выбираемой пользователем функции может ограничиваться или ограничена по меньшей мере одна из степеней свободы α, β, φ, H, L.
При этом, как показано на Фиг. 3a - Фиг. 3e и Фиг. 4, степени свободы α, β, φ, γ, L, J, H движения различных стрел могут быть установлены или устанавливаются на предварительно заданное или задаваемое значение α0, β0, φ0, γ0, L0, J0, H0, и/или могут быть ограничены или ограничиваются заданным или задаваемым частичным диапазоном α1 < α3 - α4 < α2; β1 < β3 - β4 < β2; φ1 < φ3 - φ4 < φ2; γ1 < γ3 - γ4 < γ2; L1 < L3 - L4 < L2; J1 < J3 - J4 < J2; H1 < H3 - H4 < H2.
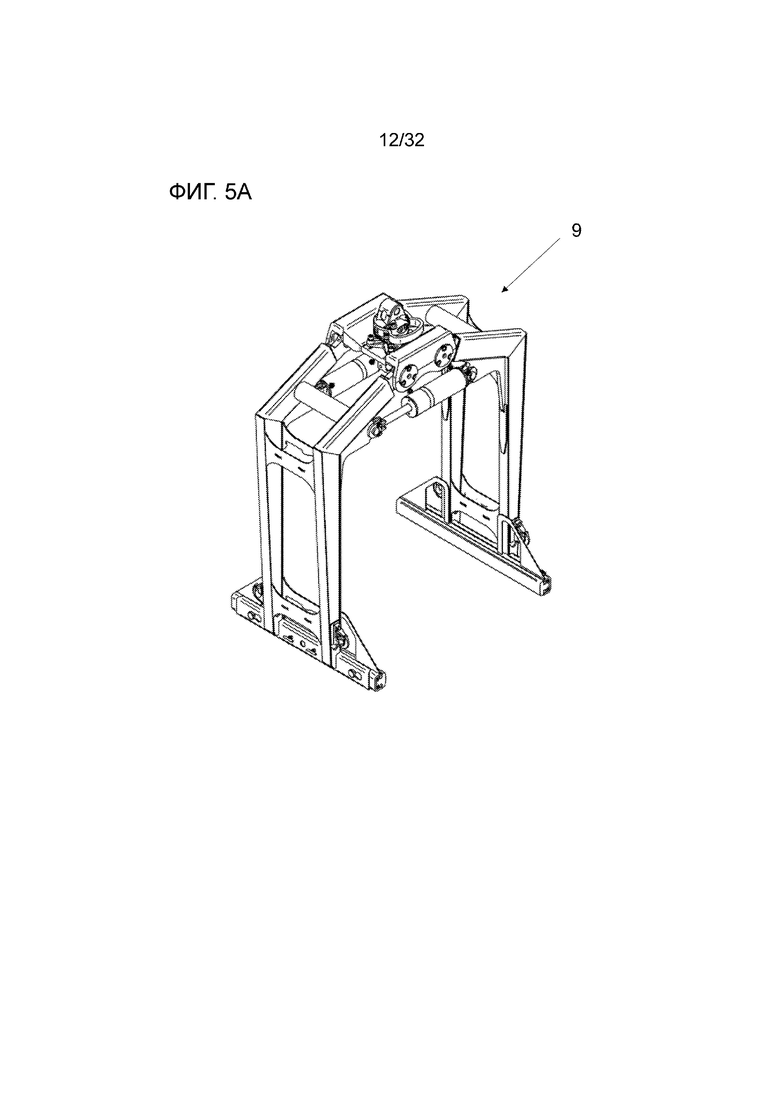
На Фиг. 5a и Фиг. 5b показаны два варианта выполнения навесных устройств, устанавливаемых на стреловой системе в форме выполненного, например, как грейфер для каменных свай рабочего механизма 9 и статичного удлинения 10 стрелы.
На Фиг. 5a показан один вариант выполнения рабочего механизма 9, который может быть расположен на выдвижной стреле крана. Габариты и набор функций этого рабочего механизма могут сохраняться в не представленном здесь крановом контроллере и привлекаться для расчетов кранового контроллера.
Представленное на 5b статичное удлинение 10 стрелы может быть установлено на выдвижной стреле крана с помощью соответствующего гнезда. Благодаря выполненному перемещаемым гнезду удлинение 10 стрелы может располагаться на выдвижной стреле под углом ϑ (здесь относительно воображаемой вертикали). Указанное удлинение 10 стрелы может быть изменяемым по длине. Сведения об удлинении 10 стрелы, как например, для удлинения 10 стрелы и угол ϑ могут сохраняться в не представленном здесь крановом контроллере и привлекаться в расчетах кранового контроллера, особенно в отношении положения оголовка крана (см. для этого Фиг. 11b и Фиг. 11d).
На Фиг. 6a показан вариант выполнения крана 1 по Фиг. 1a, соответственно, Фиг. 2a. К тому же, показано схематичное изображение кранового контроллера 6, который в режиме координатного управления предназначен для того, чтобы осуществлять координатное управление стреловой системой. Этот крановый контроллер 6 имеет не представленный здесь детально пользовательский интерфейс, причем указанный пользовательский интерфейс имеет по меньшей мере одну выбираемую пользователем функцию, с помощью которой в режиме работы координатного управления может ограничиваться или ограничена по меньшей мере одна из степеней свободы α, β, φ, L.
Схематично представленный здесь крановый контроллер 6 располагает несколькими сигнальными входами, на которые могут подаваться сигналы с установленных на кране 1 датчиков. Далее, крановый контроллер 6 содержит запоминающее устройство 11, в котором могут сохраняться, например, данные программы для рабочих режимов и вычислительных моделей кранового контроллера 6, а также входящие сигналы, и вычислительный блок 12, с помощью которого могут среди прочего обрабатываться входящие сигналы и сохраненные в запоминающем устройстве 11 данные. Указанный крановый контроллер 6 может также содержать индикатор 16. Коммуникация кранового контроллера 6 с индикатором 16 может осуществляться через кабель и/или беспроводным образом. Датчики для определения геометрии крана 1 в показанном на Фиг. 6a варианте выполнения включают в себя датчик угла поворота f1 для определения угла поворота f1 мачты 2 крана, датчик k1 угла продольного изгиба для определения угла a1 продольного изгиба основной стрелы 3 относительно мачты 2 крана, датчик k2 угла продольного изгиба для определения угла b1 продольного изгиба шарнирно-сочлененной стрелы 4 относительно основной стрелы 3, а также датчик s1 положения выдвигания для определения положения x1 выдвигания выдвижной стрелы 5.
На Фиг. 6b, аналогично Фиг. 6a, показан вариант выполнения крана 1 по Фиг. 1b, соответственно, по Фиг. 2b. В этой конфигурации кран 1 содержит, как показано, вторую шарнирно-сочлененную стрелу 7, установленную на выдвижной стреле 5 шарнирно-сочлененной стрелы 4. В качестве дополнительных датчиков для определения эксплуатационных параметров крана 1 предусмотрены датчик k3 угла продольного изгиба для определения угла g1 продольного изгиба второй шарнирно-сочлененной стрелы 7 относительно шарнирно-сочлененной стрелы 5 и датчик s2 положения выдвигания для определения положения x2 выдвигания второй выдвижной стрелы 8.
Возможен также аналогичный вариант выполнения показанной на Фиг. 6a и Фиг. 6b системы из крана 1 по Фиг. 1c, соответственно, Фиг. 2c и кранового контроллера 6.
На Фиг. 7 в качестве примера показан индикатор 16 кранового контроллера 6 предлагаемого крана 1. Этот индикатор 16 может служить в качестве чисто индикатора, но может быть выполнен и как сенсорный экран и, тем самым, одновременно представлять собой управляемый в режиме меню пользовательский интерфейс кранового контроллера 6. С помощью выбираемых пользователем функций 26a, 26b, 26c рабочих режимов могут выбираться разные рабочие режимы кранового контроллера 6. Так, в этом примере с помощью первой выбираемой функции 26a рабочего режима может быть выбран рабочий режим - рабочее положение, в котором геометрия крана 1 в заранее заданной последовательности движений приводится в рабочее положение. С помощью второй выбираемой функции 26b рабочего режима может быть выбран рабочий режим - парковочное положение, в котором геометрия крана 1 в заранее заданной последовательности движений приводится в парковочное положение. С помощью третьей выбираемой функции 26c рабочего режима может быть выбран режим координатного управления, в котором крановый контроллер 6 предназначен для того, чтобы осуществлять координатное управление стреловой системой. При выборе функции 26c рабочего режима при необходимости, как представлено на Фиг. 14, может запрашиваться подтверждение пользователя. С помощью четвертой выбираемой функции 26d рабочего режима могут быть изменены настройки режима координатного управления (например, конфигурация и/или последовательность рабочих профилей, заданий для различных степеней свободы и т.д.).
На Фиг. 8a, Фиг. 8b и Фиг. 8c в качестве примера показаны варианты выполнения пользовательских интерфейсов, каждый из которых образован индикаторами 16 крановых контроллеров 6, которые могут быть выполнены как сенсорный экран. Представленные при этом, выбираемые пользователем функции 27a, 27b, 27c, 27d, 27e, 27f, 27g, 27h, 27l, 27j, 27k служат каждая для выбора связанного с соответствующей функцией 27a, 27b, 27c, 27d, 27e, 27f, 27g, 27h, 27l, 27j, 27k рабочего профиля кранового контроллера 6 в режиме работы координатного управления. В каждом из выбираемых рабочих профилей по меньшей мере два выбора стрел в форме части стрел 2, 3, 4, 5, 7, 8, 18 стреловой системы крана 1 сохранены в предварительно заданной или задаваемой последовательности от более высокого приоритета к более низкому приоритету или непрерывно определяются во время работы. Крановый контроллер 6 при этом предназначен для того, чтобы привлекать выборы стрел, сохраненные в выбранном рабочем профиле, в соответствии с его определением приоритета для осуществления координатного управления стреловой системой и управлять.
Каждая выбранная на Фиг. 8a - Фиг. 8c функция 27a, 27d и 27h отмечена на индикаторе 16 черной точкой (сплошной кружок), так что пользователь сразу видит, какой рабочий профиль выбран. Представленный на пиктограммах на Фиг. 8a и Фиг. 8b кран может относиться к варианту выполнения крана 1 по Фиг. 1a, соответственно, Фиг. 2a, а представленный на Фиг. 8c кран к варианту выполнения крана 1 по Фиг. 1b, соответственно, Фиг. 2b. Аналогичное возможно и для варианта выполнения крана 1 по Фиг. 1c, соответственно, Фиг. 2c.
Показанные на Фиг. 8a - Фиг. 8c меню могут соответствовать, например, каждое одному субменю, которое может обеспечиваться выбором функции 26d в меню на Фиг. 7.
С помощью показанных на Фиг. 8a функций 27a, 27b и 27c стреловая система крана 1 в режиме координатного управления может удерживаться в предпочтительном положении стрелы. Выбор функции 27a может соответствовать, например, стандартной конфигурации крана 1, в которой стреловая система удерживается в оптимизированном по степени загрузки и по дальности вылета положении стрелы. Больше деталей можно извлечь из Фиг. 9a.
Выбор функции 27b может соответствовать, например, конфигурации крана 1, в которой стреловая система удерживается в положении стрелы, которое идеально подходит для транспортировки крупногабаритных грузов. Подробности можно понять из Фиг. 9b.
Выбор функции 27c может соответствовать, например, конфигурации крана 1, в которой особенно основная стрела 3 стреловой системы удерживается в предпочтительной позиции. Подробности можно понять из Фиг. 9c.
Выбор функций 27d - 27g на Фиг. 8b при осуществлении координатного управления стреловой системой крана 1 по Фиг. 1a, соответственно, 2a может повлиять на привлечение выбора стрел в форме части (3, 4, 5; 4, 5; 3, 5; 3, 4) всех стрел (3, 4, 5) стреловой системы. Выбор функции 27d может соответствовать выбору стрел, при котором при осуществлении координатного управления основная стрела 3 и шарнирно-сочлененная стрела 4, шарнирно-сочлененная стрела 4 и выдвижная стрела 5, или основная стрела 3 и выдвижная стрела 5 привлекаются в зависимости от пригодности, соответственно, приоритета. Выбор функции 27e может соответствовать выбору стрел, при котором при осуществлении координатного управления привлекаются шарнирно-сочлененная стрела 4 и выдвижная стрела 5. Выбор функции 27f может соответствовать выбору стрел, при котором при осуществлении координатного управления привлекаются основная стрела 3 и выдвижная стрела 5. Выбор функции 27g может соответствовать выбору стрел, при котором при осуществлении координатного управления привлекаются основная стрела 3 и шарнирно-сочлененная стрела 4. Выбором соответствующих функций ограничиваются остальные степени свободы стрел стреловой системы.
Аналогично этому для выбора функций 27h - 27k на Фиг. 8c при осуществлении координатного управления стреловой системой крана 1 по Фиг. 1b, соответственно, Фиг. 2b может осуществляться привлечение выбора стрел соответствующей части из всех стрел (3, 4, 5, 7, 8) стреловой системы.
На Фиг. 9a - Фиг. 9c показаны возможные варианты применения, которые используются рабочими профилями.
В примере на Фиг. 9a для степени свободы α поворотного движения основной стрелы 3 установлен заданный угол α0, который находится в угловом диапазоне, который оптимизирован по степени загрузки и по дальности вылета (например, 20°), например, поскольку была выбрана соответствующая функция пользовательского интерфейса для установления заданного угла α0 степени свободы α поворотного движения основной стрелы 3.
Тем самым, кран 1 достигает, по существу, максимальной подъемной силы и максимальной дальности вылета. Если это возможно, в этом примере применения всегда работают с выбором стрел, который включают в себя шарнирно-сочлененную стрелу 4 и выдвижную стрелу 5.
В примере по Фиг. 9b в отношении шарнирно-сочлененной стрелы 4 установлено, что шарнирно-сочлененная стрела 4 для предотвращения ее полного распрямления (180°) всегда останавливается в области устанавливаемого значения WK перед 180°, например, за счет того, что для ограничения степени свободы β поворотного движения шарнирно-сочлененной стрелы 4 частичным диапазоном β1 - β4 < β2 (ср. в связи с этим Фиг. 3b; β4=180° - WK) была выбрана соответствующая функция пользовательского интерфейса. Такого рода конфигурация является идеальной для транспортировки крупногабаритных грузов. Если это возможно, в этом примере применения всегда приоритет отдают выбору стрел, который включает в себя основную стрелу 3 и выдвижную стрелу 5.
В примере по Фиг. 9c основная стрела 3 удерживается на такой длине, какая возможна в ее заданной позиции (например, > 60°). Это дает по меньшей мере временное ограничение для степени свободы α поворотного движения основной стрелы 3 на частичный диапазон α3 - α2 (см. в связи с этим также Фиг. 3a). Когда основная стрела 3 оставляет заданную позицию, двигаясь вниз (в направлении 0°), то она, если или как только это движение позволяет, всегда снова позиционируется обратно под заданным углом. Тем самым может предотвращаться постоянное опускание основной стрелы 3 при работах в вертикальном положении. Эта функция возврата основной стрелы 3 может обеспечиваться, например, с привлечением выборов стрел рабочего профиля согласно таблице 4, при котором, если возможно, всегда работают с выбором стрел с приоритетом 1 (шарнирно-сочлененная стрела 4 и выдвижная стрела 5). Кран 1 перемещается, например, в режиме координатного управления с привлечением выборов стрел рабочего профиля согласно таблице 4 и в процессе движения стреловой системы основная стрела 3 оставляет свою заданную позицию и находится в угловом положении 50°. Впоследствии, в результате конечного положения или возобновления движения происходит смена выбора стрел. Вслед за этим оба выбора стрел, которые включают в себя основную стрелу 3 (т.е. выбор стрел с приоритетом 2 и выбор стрел с приоритетом 3) оцениваются крановым контроллером 6 в отношении того, можно ли с актуальной пользовательской настройкой снова подойти к заданной позиции основной стрелы 3. В соответствии с этим тот выбор стрел, при котором основная стрела 3 наиболее быстро снова перемещается в заданную позицию, на некоторое время (динамично) ставится на первое место (соответственно, получает приоритет под номером 1). При достижении заданной позиции основной стрелы 3 поставленный на некоторое время на первое место выбор стрел снова ставится на свою первоначальную позицию согласно таблице 4 (соответственно, снова получает свой первоначальный приоритет).
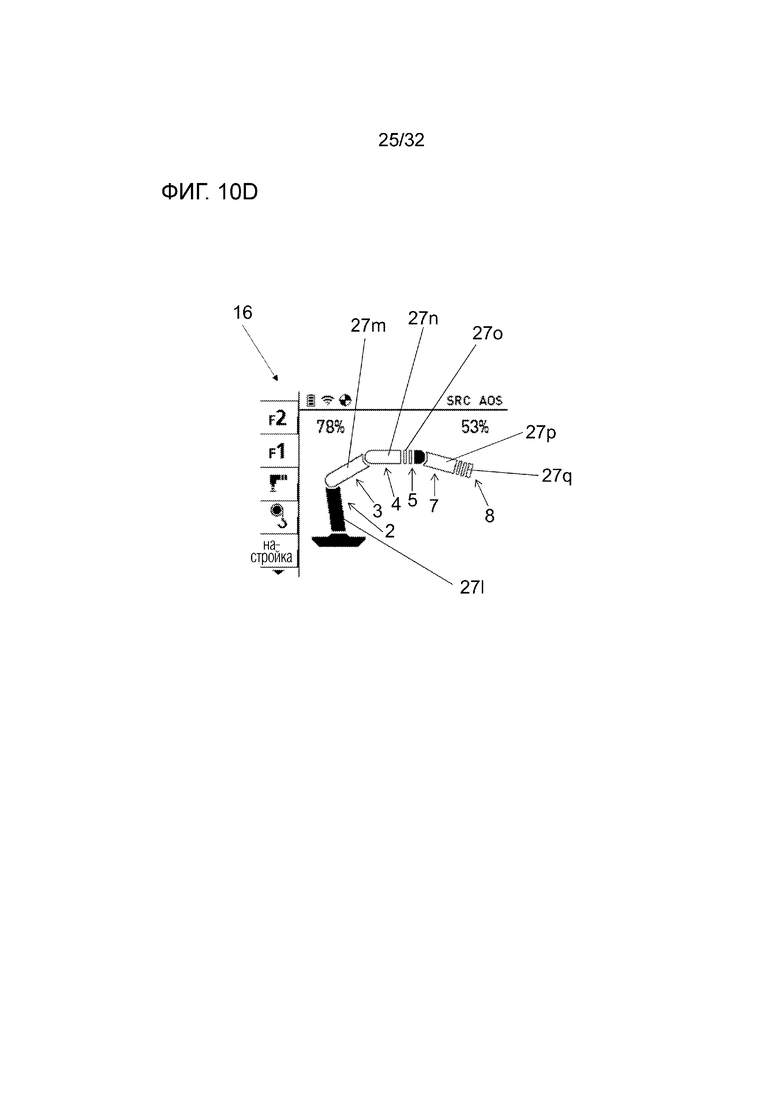
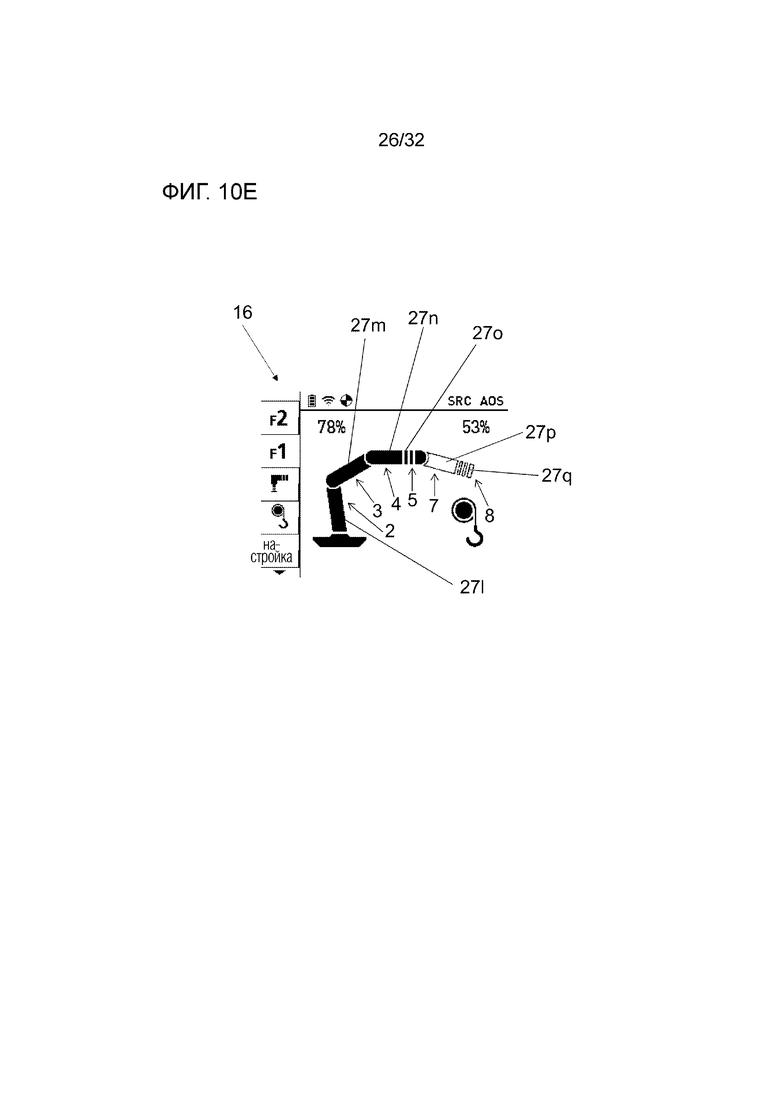
На Фиг. 10a - Фиг. 10e в качестве примера показаны варианты выполнения пользовательских интерфейсов, каждый из которых образован индикатором 16 крановых контроллеров 6, которые могут быть выполнены как сенсорный экран.
Если индикатор 16 кранового контроллера 6 выполнен как сенсорный экран, то пользовательский интерфейс может быть непосредственно образован сенсорным экраном. При этом, например, однократным касанием представленной на индикаторе 16 стрелы 2, 3, 4, 5, 7, 8 крана может ограничиваться соответствующая степень свободы. Для визуализации ограничения цвет соответственно ограниченной стрелы 2, 3, 4, 5, 7, 8 крана может измениться с белого на черный. При следующем касании стрелы 2, 3, 4, 5, 7, 8 крана это ограничение может снова сниматься, и изображение стрелы 2, 3, 4, 5, 7, 8 крана меняется с черного на белое. Представленный на Фиг. 10a - Фиг. 10e вариант выполнения пользовательского интерфейса предпочтителен, в частности, при выполнении пользовательского интерфейса в виде сенсорного экрана.
Если этот индикатор 16 не выполнен как сенсорный экран или что-то подобное, то работа с управляемым в режиме меню пользовательским интерфейсом может осуществляться с помощью управляющего элемента. В таком варианте выполнения пользовательского интерфейса предпочтителен вариант выполнения, показанный на Фиг. 8a - Фиг. 8c. В таком случае представленный на Фиг. 10a - Фиг. 10e вариант выполнения может служить, например, в качестве своего рода статусного индикатора для пользователя, который на взгляд сможет распознавать, какие стрелы 2, 3, 4, 5, 7, 8 крана, соответственно, степени свободы ограничены.
Представленные, выбираемые пользователем функции 27l, 27m, 27n, 27o, 27p, 27q кранового контроллера 6 в режиме работы координатного управления служат каждая для выбора одной стрелы стреловой системы крана 1, степень свободы которой должна быть ограничена путем фиксации на предварительно заданном или задаваемом значении (или в частичном диапазоне). Другими словами, посредством этих выбираемых пользователем функций 27l, 27m, 27n, 27o, 27p, 27q можно выбирать, какие стрелы стреловой системы должны быть заблокированы, причем эти заблокированные стрелы больше не принимают участия в координатно-управляемом движении стреловой системы, а вместо этого остаются в своей заблокированной позиции. На каждом из индикаторов 16 по Фиг. 10a и Фиг. 10b для этого графически показана стреловая система крана 1, которая подобно варианту выполнения по Фиг. 1a, соответственно, Фиг. 2a, содержит мачту 2 крана, основную стрелу 3, шарнирно-сочлененную стрелу 4 и выдвижную стрелу 5. Эти стреловые системы представленных на индикаторах 16 по Фиг. 10c - Фиг. 10e кранов 1 дополнительно содержат вторую шарнирно-сочлененную стрелу 7 и вторую выдвижную стрелу 8. Каждая из заблокированных посредством выбираемых пользователем функций 27l, 27m, 27n, 27o, 27p, 27q стрел на изображениях стреловых систем показаны черным цветом.
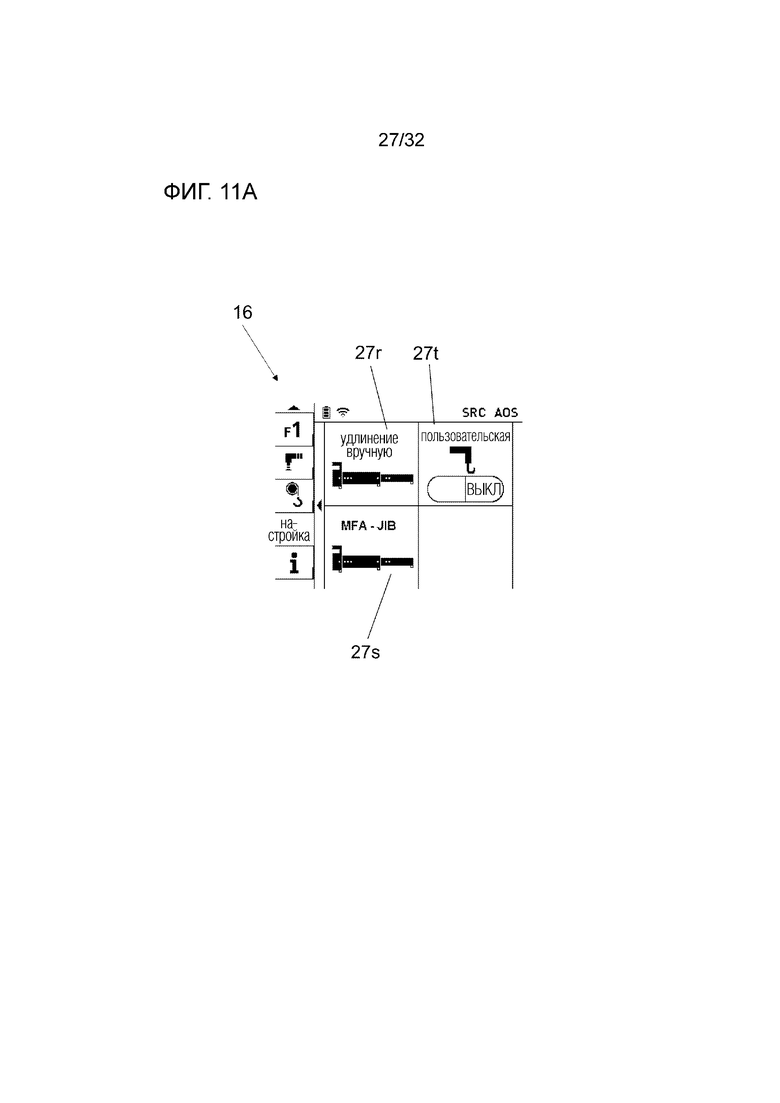
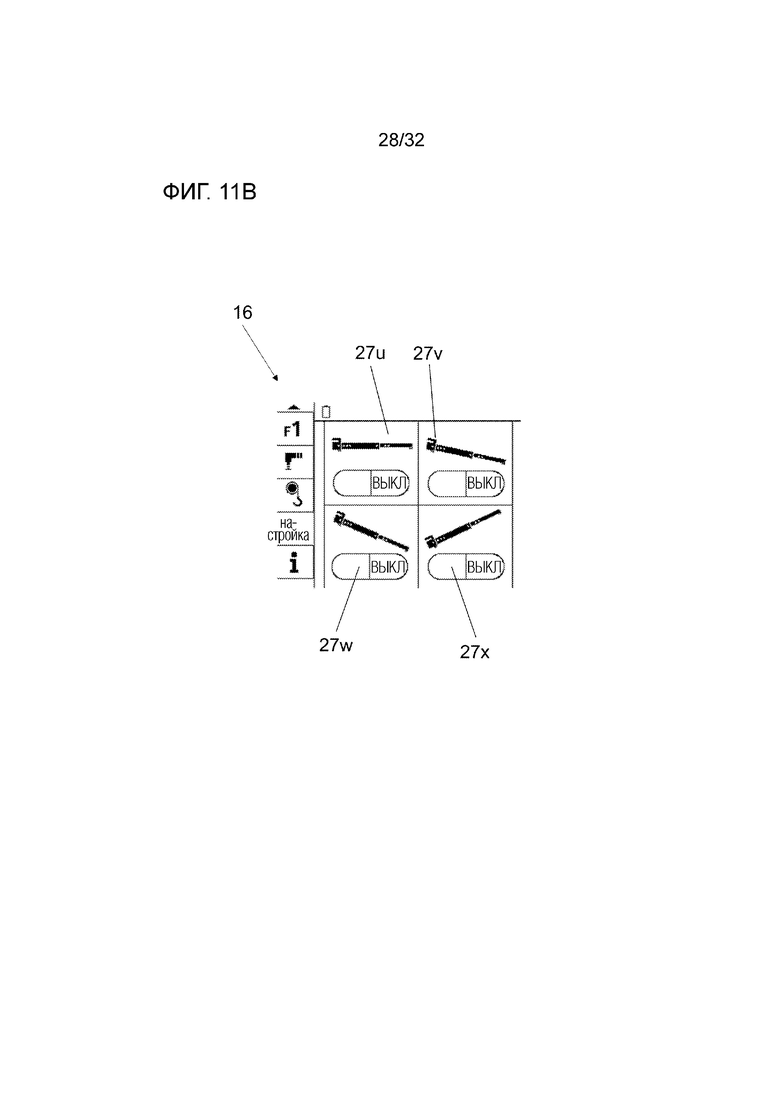
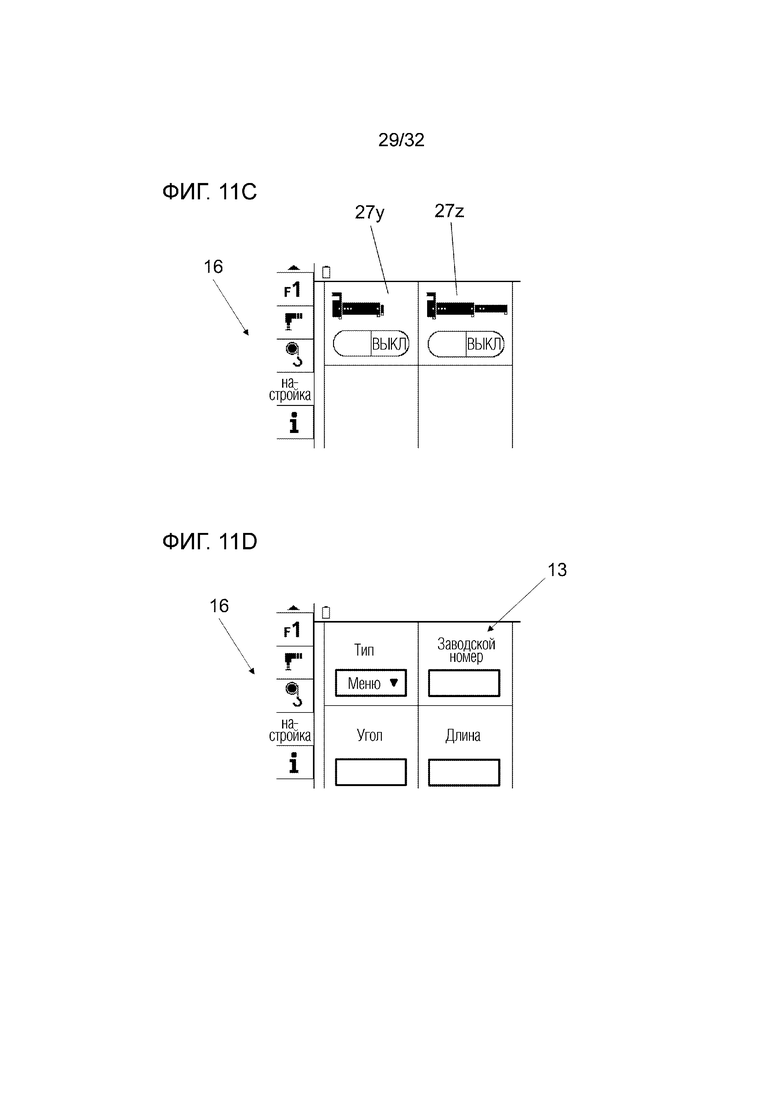
На Фиг. 11a - Фиг. 11c в качестве примера показаны варианты выполнения пользовательских интерфейсов, каждый из которых образован соответствующим индикатором 16 крановых контроллеров 6, которые может быть выполнен как сенсорный экран. Представленные при этом, выбираемые пользователем функции 27r, 27s, 27t, 27u, 27v, 27w, 27x, 27y, 27z служат каждая для ввода сведений относительно помещенного на стреловой системе крана 1 навесного устройства. С помощью представленных на Фиг. 11a выбираемых функций 27r и 27s попадают, например, в меню, посредством которого могут выбираться сведения относительно навесного устройства в форме удлинения 10 стрелы или о рабочем механизме 9 (см. Фиг. 5a и Фиг. 5b) из сохраненной в запоминающем устройстве 11 кранового контроллера 6 базы данных. Посредством представленной на Фиг. 11a выбираемой функции 27t попадают, например, на маску ввода, с помощью которой могут вводиться сведения о не сохраненных в запоминающем устройстве 11 кранового контроллера 6 навесных устройствах. С помощью представленных на Фиг. 11b выбираемых функций 27u, 27v, 27w, 27x может быть выбрано или, соответственно, задано угловое положение (угол ϑ) установленного на стреловой системе навесного устройства в форме удлинения 10 стрелы (см. Фиг. 5b). Представленные на Фиг. 11c выбираемые функции 27y, 27z служат для выбора статуса настройки установленного на стреловой системе навесного устройства в форме, например, одного или нескольких приводимых вручную выдвижных удлинений.
На Фиг. 11d показан вариант выполнения показанной на индикаторе 16 маски ввода 13, посредством которой могут выбираться или вводиться сведения о наборе функций и/или указание размерности, и/или угловые положения в отношении по меньшей мере одного навесного устройства 9, 10 и передаваться на крановый контроллер 6.
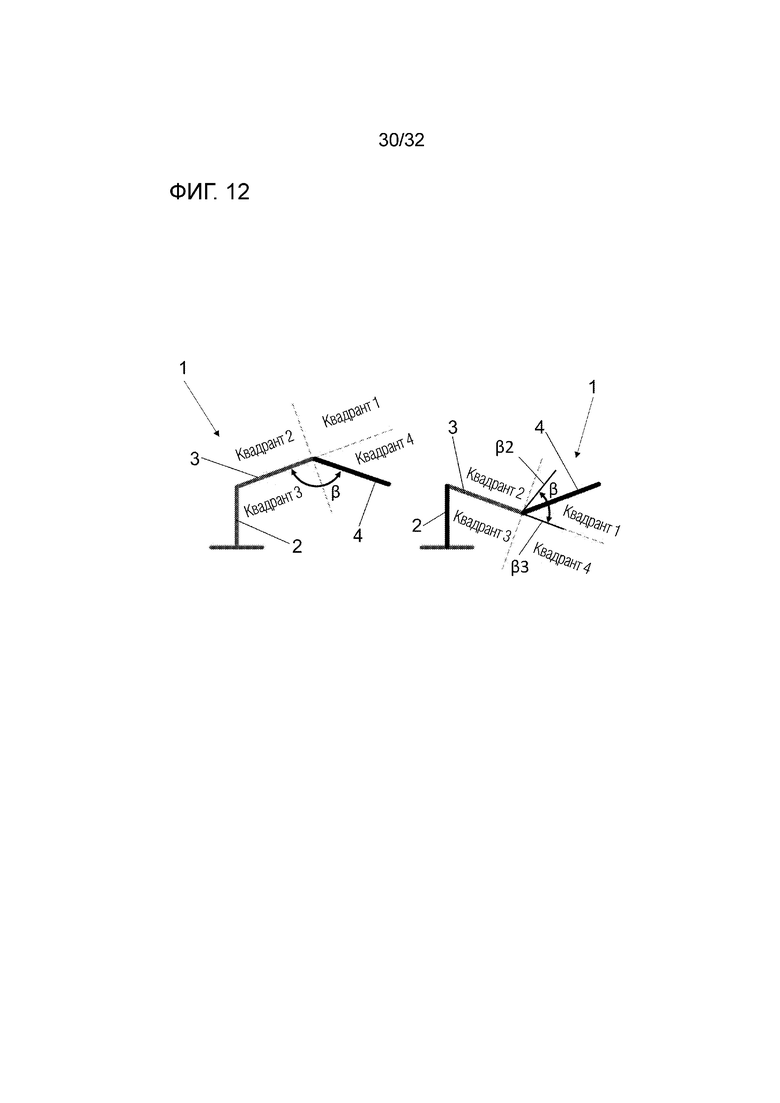
На Фиг. 12 в качестве примера показано ограничение степени свободы β шарнирно-сочлененной стрелы 4 частичным диапазоном β1 < β3 - β2, чтобы сделать возможным так называемое перенапряжение шарнирно-сочлененной стрелы 4 за счет того, что крановый контроллер 6 в режиме работы координатного управления предоставляет вспомогательную функцию, которая может выбираться посредством выбираемой пользователем функции пользовательского интерфейса.
Воображаемое продолжение основной стрелы 3 (линии основной стрелы) и проходящая перпендикулярно ей воображаемая линия через поворотную опору шарнирно-сочлененной стрелы 4 на основной стреле 3 (линия поворотной опоры) образуют четыре области, соответственно, квадранта. При этом квадрантом 1 обозначается область между линией основной стрелы и линией поворотной опоры над линией основной стрелы и в направлении воображаемого продолжения основной стрелы 3. Квадрантом 2 обозначается область между линией основной стрелы и линией поворотной опоры над линией основной стрелы и в направлении основной стрелы 3. Квадрантом 3 обозначается область между линией основной стрелы и линией поворотной опоры под линией основной стрелы и в направлении основной стрелы 3. Квадрантом 4 обозначается область между линией основной стрелы и линией поворотной опоры под линией основной стрелы и в направлении воображаемого продолжения основной стрелы 3.
На левом изображении шарнирно-сочлененная стрела 4 находится в квадранте 4. При приближении шарнирно-сочлененной стрелы 4 к мертвой точке (угол шарнирной оси составляет 180°, т.е. шарнирно-сочлененная стрела 4 расположена точно на прямом продолжении относительно основной стрелы 3) шарнирно-сочлененная стрела 4, выходя из квадранта 4, движется в квадрант 1, и степень свободы β шарнирно-сочлененной стрелы 4 ограничивается квадрантом 1 (см. правое изображение).
Как только шарнирно-сочлененная стрела 4 окажется в квадранте 1, она будет двигаться только в этом квадранте, чтобы расчет в режиме работы координатного управления оставался однозначным.
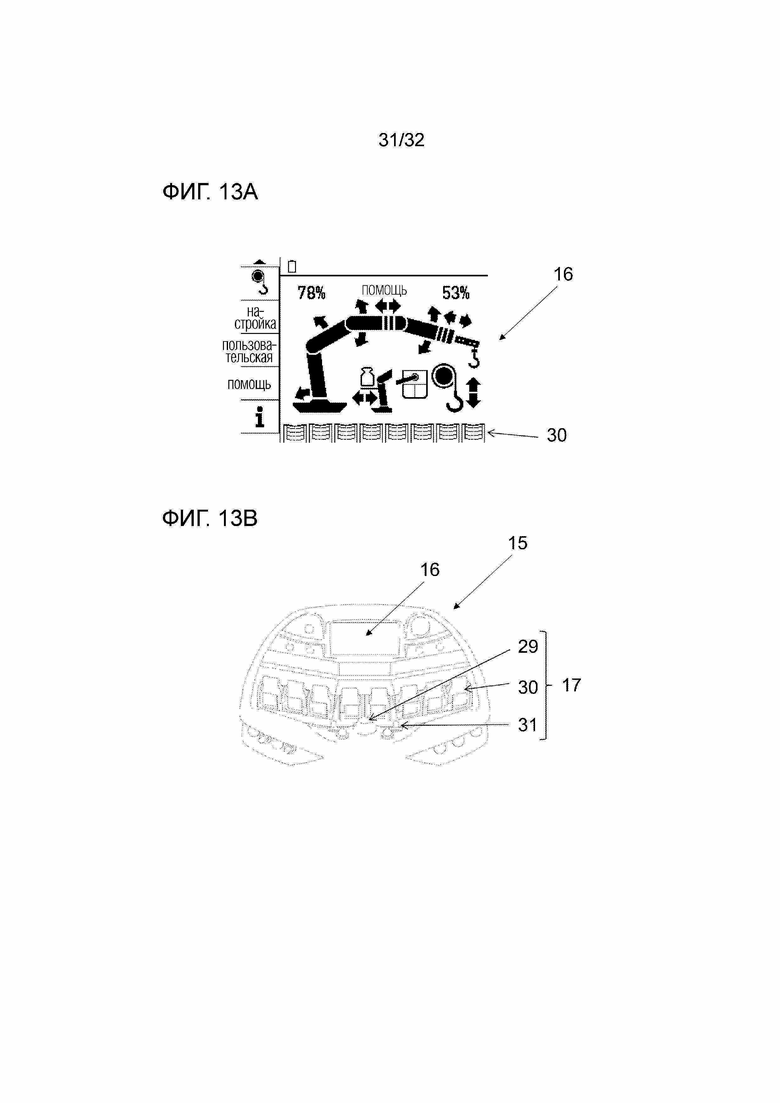
На Фиг. 13a показан индикатор 16 кранового контроллера 6 предлагаемого крана 1. Изображение на индикаторе 16 кранового контроллера 6 может соответствовать изображению в рабочем режиме, в котором возможно свободное управление стреловой системой крана 1 на основании вводимых пользователем управляющих команд. Показанное на Фиг. 13a изображение содержит графические представления нескольких линейных рычагов 30 для визуализации назначений функций, применимых в данном режиме работы.
На Фиг. 13b показан вариант выполнения пульта 15 управления кранового контроллера 6. Этот пульт 15 управления в представленном варианте выполнения имеет по меньшей мере один индикатор 16 и управляющие элементы 17 в форме вращающейся рукоятки 29, рычага линейного перемещения 30 и переключателя 31. Управляющие элементы могут служить для навигации управляемого в режиме меню пользовательского интерфейса, для выбора выбираемой пользователем функции или для выдачи пользователем управляющих команд.
В одном варианте выполнения пульта 15 управления согласно варианту выполнения кранового контроллера 6 по Фиг. 13a этот пульт 15 управления может иметь предустановленный управляющий элемент 17, например, в форме переключателя 31, сконфигурированного как аварийный блокиратор. Если крановый контроллер 6 находится в режиме работы координатного управления, то путем приведения в действие управляющего элемента 17 в форме выполненного таким образом переключателя 31 он может переводиться в следующий рабочий режим. Этот переход в следующий рабочий режим продолжается так долго, пока управляющий элемент 17 в форме, например, переключателя 31 остается приведенным в действие пользователем.
Представленный на Фиг. 13a индикатор 16 может отображаться, например, когда в режиме работы координатного управления нажимается кнопка вышеописанного аварийного блокиратора, причем крановый контроллер переходит в следующий рабочий режим свободного управления. Это становится видно оператору по изображению на индикаторе 16. Это может происходить независимо от варианта выполнения (сенсорный ли это экран или нет) индикатора 16.
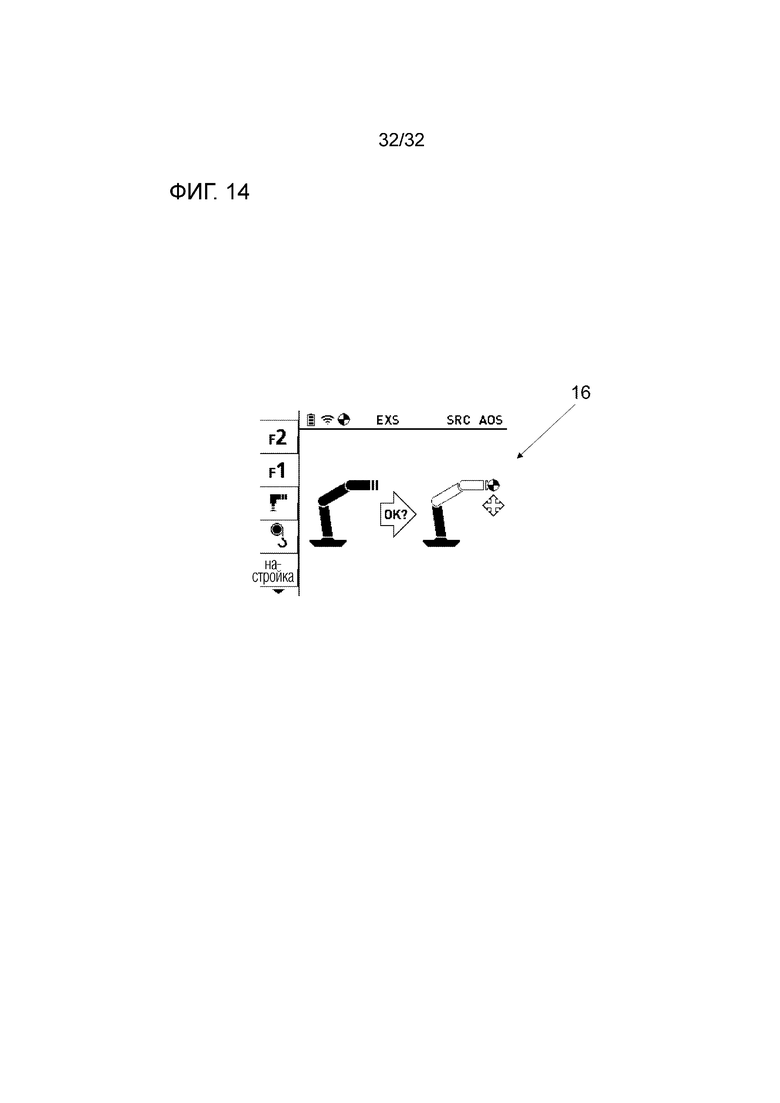
На Фиг. 14 показан индикатор 16 с представленным на нем запросом на подтверждение, который должен подтверждаться, например, пользователем, когда он переходит в режим координатного управления. Как показано на Фиг. 7, этот запрос на подтверждение может производиться при выборе функции 26c рабочего режима при переходе в рабочий режим с координатным управлением.
Перечень ссылочных обозначений
1 кран
2 мачта крана
3 основная стрела
4 шарнирно-сочлененная стрела
5 выдвижная стрела
6 крановый контроллер
7 вторая шарнирно-сочлененная стрела
8 вторая выдвижная стрела
9 рабочий механизм
10 удлинение стрелы
11 запоминающее устройство
12 процессор
13 маска ввода
14 оголовок крана
15 пульт управления
16 индикатор
17 управляющий элемент
18 выдвижная стрела основной стрелы
19 транспортное средство
20 поворотный механизм
21 главный цилиндр
22, 23, 25 цилиндр сочленения
24 дополнительная шарнирно-сочлененная стрела
26a - 26d выбираемые функции рабочих режимов
27a - 27z выбираемые функции
28 соединительная область
29 вращающаяся рукоятка
30 линейный рычаг
31 переключатель
V1, h1, h2, h3 оси
α, β, φ, γ, L, J, H степени свободы стреловой системы
φ0, φ1, φ2, φ3, φ4 угол поворота мачты крана
α0, α1, α2, α3, α4 угол поворота основной стрелы
β0, β1, β2, β3, β4 угол поворота шарнирно-сочлененной стрелы
γ0, γ1, γ2, γ1, γ4 угол поворота второй шарнирно-сочлененной стрелы
L0, L1, L2, L3, L4 положения выдвижения выдвижной стрелы
J0, J1, J2, J3, J4 положения выдвижения второй выдвижной стрелы
H0, H1, H2, H3, H4 положения выдвижения выдвижной стрелы основной стрелы
d угол удлинения стрелы
a1, b1, g1, d1 угол
x1, x2 положение выдвижения
s1, s2 датчик положения выдвижения
k1, k2, k3 датчик угла продольного изгиба
f1 датчик угла поворота
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАНОВЫЙ КОНТРОЛЛЕР | 2015 |
|
RU2641395C1 |
| Кран | 2018 |
|
RU2683918C1 |
| СПОСОБ УПРАВЛЕНИЯ И/ИЛИ РЕГУЛИРОВАНИЯ СВЯЗАННОГО С ТРАНСПОРТНЫМ СРЕДСТВОМ ПОДЪЕМНОГО УСТРОЙСТВА | 2022 |
|
RU2819298C2 |
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ (ВАРИАНТЫ) И СИСТЕМА БЕЗОПАСНОСТИ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2009 |
|
RU2396201C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАГРУЗКИ, БЛОК УПРАВЛЕНИЯ ДЛЯ ГИДРАВЛИЧЕСКОГО ПОДЪЕМНОГО УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ТАКОГО СПОСОБА | 2017 |
|
RU2714833C1 |
| СПОСОБ ОБСЛУЖИВАНИЯ КОМПЛЕКСА, ВКЛЮЧАЮЩЕГО ДВА И БОЛЕЕ МОБИЛЬНЫХ СТРЕЛОВЫХ ПОРТОВЫХ КРАНА | 2010 |
|
RU2426685C1 |
| СПОСОБ ЗАЩИТЫ СТРЕЛОВОГО ГРУЗОПОДЪЕМНОГО КРАНА ОТ ПЕРЕГРУЗКИ (ВАРИАНТЫ) | 2006 |
|
RU2322382C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2019 |
|
RU2737758C1 |
| БАШЕННЫЙ СТРЕЛОВОЙ КРАН | 2005 |
|
RU2290362C1 |
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ РЕЛЬСОВОГО КРАНА НА КРАНОВОМ ПУТИ | 2005 |
|
RU2281241C2 |
Предложен кран, содержащий стрелу, контроллер, который в режиме координатного управления предназначен для осуществления координатного управления стреловой системой. Контроллер содержит пользовательский интерфейс. Пользовательский интерфейс содержит выбираемую пользователем функцию, с помощью которой в режиме работы координатного управления ограничивают одну из степеней свободы (α, β, ϕ, L) стреловой системы. Предложено также транспортное средство. Достигается повышение безопасности. 2 н. и 19 з.п. ф-лы, 36 ил., 4 табл.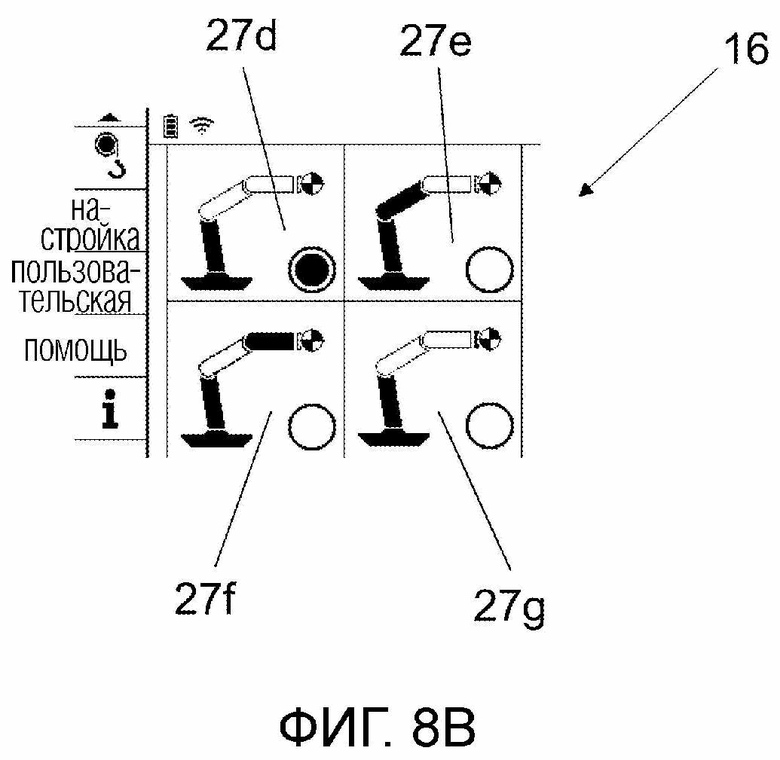
1. Кран (1), в частности грузовой кран, имеющий стреловую систему, включающую в себя одну или несколько стрел, причем эта стреловая система включает в себя по меньшей мере:
- установленную с возможностью поворота вокруг оси вращения мачту (2) крана, которая установлена поворотно с помощью конструктивно задаваемой поворотной области мачты крана (ϕ1 - ϕ2) и благодаря своей поворотной установке в опорах обладает степенью свободы (ϕ),
- основную стрелу (3), которая поворотно установлена на мачте (2) крана с помощью конструктивно задаваемой поворотной области основной стрелы (α1 - α2) и благодаря своей поворотной установке в опорах имеет степень свободы (α),
- шарнирно-сочлененную стрелу (4), которая поворотно установлена на основной стреле (3) с помощью конструктивно задаваемой поворотной области шарнирно-сочлененной стрелы (β1 - β2) и благодаря своей поворотной установке в опорах имеет степень свободы (β),
- по меньшей мере одну выдвижную стрелу (5), которая установлена с возможностью перемещения в шарнирной стреле (4) с помощью конструктивно задаваемой области поступательного движения (L1 - L2) и благодаря своей поворотной установке в опорах имеет степень свободы (L),
и причем кран (1) имеет крановый контроллер (6), который в режиме координатного управления предназначен для осуществления координатного управления стреловой системой,
отличающийся тем, что крановый контроллер (6) имеет пользовательский интерфейс, причем этот пользовательский интерфейс имеет по меньшей мере одну выбираемую пользователем функцию, посредством которой в режиме работы координатного управления может ограничиваться или ограничена по меньшей мере одна из степеней свободы (α, β, ϕ, L) стреловой системы.
2. Кран по п. 1, причем стреловая система дополнительно имеет вторую шарнирно-сочлененную стрелу (7), которая поворотно установлена на выдвижной стреле (5) с помощью конструктивно задаваемой второй поворотной области шарнирно-сочлененной стрелы (γ1 - γ2) и благодаря своей поворотной установке в опорах имеет степень свободы (γ) и которая предпочтительно содержит по меньшей мере одну вторую выдвижную стрелу (8), которая установлена с возможностью перемещения во второй шарнирной стреле (7) с помощью конструктивно задаваемой области поступательного движения второй выдвижной стрелы (J1 - J2) и благодаря своей поворотной установке в опорах имеет степень свободы (J), причем посредством указанной по меньшей мере одной выбираемой пользователем функции может ограничиваться или ограничена по меньшей мере одна из степеней свободы (α, β, ϕ, γ, L, J) стреловой системы.
3. Кран по п. 1 или 2, причем стреловая система дополнительно имеет по меньшей мере одну выдвижную стрелу (18) основной стрелы, которая установлена с возможностью перемещения в основной стреле (3) с помощью конструктивно задаваемой области поступательного движения (H1 - H2) и благодаря своей поворотной установке в опорах имеет степень свободы (H), причем посредством указанной по меньшей мере одной выбираемой пользователем функции может ограничиваться или ограничена по меньшей мере одна из степеней свободы (α, β, ϕ, γ, L, J, H) стреловой системы.
4. Кран по любому из пп. 1-3, причем на стреловой системе установлено по меньшей мере одно навесное устройство (9, 10) в форме рабочего механизма (9) и/или удлинения (10) стрелы, предпочтительно устанавливаемое статично и при необходимости под задаваемым углом (ϑ) удлинение (10) стрелы.
5. Кран по п. 4, причем посредством пользовательского интерфейса на крановый контроллер (6) могут передаваться сведения, предпочтительно сведения о наборе функций, и/или указание размерности, и/или угловые положения, в отношении по меньшей мере одного навесного устройства (9, 10), причем эти сведения могут выбираться из сохраненной в запоминающем устройстве (11) кранового контроллера (6) базы данных и/или могут вводиться посредством пользовательского интерфейса, предпочтительно через маску ввода (13).
6. Кран по любому из предыдущих пунктов, причем крановый контроллер (6) предназначен для осуществления координатного управления оголовком крана (14), или одной предварительно заданной или задаваемой точкой стреловой системы, или одной точкой, предварительно заданной или задаваемой установленной стреловой системой.
7. Кран по любому из предыдущих пунктов, причем посредством указанной по меньшей мере одной выбираемой пользователем функции по меньшей мере одна степень свободы (α, β, ϕ, γ, L, J, H) стреловой системы может ограничиваться или ограничена для того, чтобы устранить или снизить статическую неопределенность стреловой системы.
8. Кран по предыдущему пункту, причем степень свободы (ϕ) поворотной мачты (2) крана для сохранения поворотности мачты (2) крана исключена из набора ограничиваемых или ограниченных степеней свободы (α, β, γ, L, J, H).
9. Кран по любому из двух предыдущих пунктов, причем посредством указанной по меньшей мере одной выбираемой пользователем функции может ограничиваться или ограничена одна степень свободы (α, β, ϕ, γ, L, J, H) стреловой системы, или все степени свободы (α, β, ϕ, γ, L, J, H) стреловой системы могут ограничиваться или ограничены до двух степеней свободы.
10. Кран по любому из пп. 7-9, причем крановый контроллер (6) в режиме координатного управления предназначен для того, чтобы для осуществления координатного управления стреловой системой привлекать выбор стрел в форме части стрел (2, 3, 4, 5, 7, 8, 18) стреловой системы, причем этот крановый контроллер (6) имеет по меньшей мере один рабочий профиль, в котором сохранены или непрерывно определяются по меньшей мере два выбора стрел в предварительно заданной или задаваемой последовательности от более высокого приоритета к более низкому приоритету, и указанный крановый контроллер (6) предназначен для того, чтобы привлекать выборы стрел, сохраненные в по меньшей мере одном рабочем профиле, в соответствии с его определением приоритета для осуществления координатного управления стреловой системой и управлять, причем посредством указанной по меньшей мере одной выбираемой пользователем функции может выбираться по меньшей мере один рабочий профиль.
11. Кран по предыдущему пункту, причем этот крановый контроллер (6) предназначен для того, чтобы в зависимости от задаваемого, и/или заданного, и/или доминирующего положения стреловой системы привлекать выбор стрел для координатного управления.
12. Кран по любому из двух предыдущих пунктов, причем крановый контроллер (6) предназначен для того, чтобы привлечение и управление выбором стрел из указанных по меньшей мере двух выборов стрел происходило дополнительно в зависимости от возможности осуществления координатного управления с соответствующим выбором стрел.
13. Кран по любому из предыдущих пунктов, причем ограничение указанной по меньшей мере одной степени свободы (α, β, ϕ, γ, L, J, H) происходит за счет того, что она
- может устанавливаться или установлена на предварительно заданное или задаваемое значение (α0, β0, ϕ0, γ0, L0, J0, H0), и/или
- может ограничиваться или ограничена заданным или задаваемым частичным диапазоном (α1 < α3 - α4 < α2; β1 < β3 - β4 < β2; ϕ1 < ϕ3 - ϕ4 < ϕ2; γ1 < γ3 - γ4 < γ2; L1 < L3 - L4 < L2; J1 < J3 - J4 < J2; H1 < H3 - H4 < H2), и/или
- может ограничиваться или ограничена в отношении скорости ее изменения  .
.
14. Кран по предыдущему пункту, причем за счет ограничения указанной по меньшей мере одной степени свободы (α, β, ϕ, γ, L, J, H) степень свободы (β) шарнирно-сочлененной стрелы (4) может ограничиваться или ограничена заданным или задаваемым частичным диапазоном (β1 < β3 - β4 < β2), предпочтительно задаваемым или заданным квадрантом, так что шарнирно-сочлененная стрела (4) в режиме работы координатного управления может позиционироваться или позиционирована в чрезмерно растянутом наклонном положении над воображаемым продолжением основной стрелы (3).
15. Кран по любому из двух предыдущих пунктов, причем задаваемый или заданный частичный диапазон (α1 < α3 - α4 < α2; β1 < β3 - β4 < β2; ϕ1 < ϕ3 - ϕ4 < ϕ2; γ1 < γ3 - γ4 < γ2; L1 < L3 - L4 < L2; J1 < J3 - J4 < J2; H1 < H3 - H4 < H2) меньше или равен 2°, предпочтительно меньше или равен 0,5°, соответственно меньше или равен 10 см, предпочтительно меньше или равен 2,5 см, и/или скорость изменения меньше или равна 0,2° в секунду, предпочтительно меньше или равна 0,05° в секунду, соответственно меньше или равна 2 см в секунду, предпочтительно меньше или равна 0,5 см в секунду.
16. Кран по любому из предыдущих пунктов, причем крановый контроллер (6) имеет предпочтительно переносной пульт управления (15) и пользовательский интерфейс выполнен на этом пульте управления (15).
17. Кран по любому из предыдущих пунктов, причем пользовательский интерфейс может управляться в режиме меню и/или содержит по меньшей мере один управляющий элемент (17) кранового контроллера (6).
18. Кран по любому из предыдущих пунктов, причем пользовательский интерфейс содержит по меньшей мере один управляющий элемент (17) кранового контроллера (6) и выбор выбираемой функции происходит путем приведения в действие пользователем указанного по меньшей мере одного управляющего элемента (17).
19. Кран по предыдущему пункту, причем крановый контроллер (6) в дополнительном рабочем режиме предназначен для осуществления свободного управления стреловой системой, причем в дополнительном рабочем режиме свободное управление стреловой системой производится с помощью по меньшей мере одного управляющего элемента (17), причем каждый управляющий элемент (17) предусмотрен для ввода управляющих команд для движения соответственно одной стрелы стреловой системы в соответствии со степенью свободы (α, β, ϕ, γ, L, J, H), причем путем приведения в действие указанного по меньшей мере одного управляющего элемента (17) пользователем в режиме работы координатного управления привязанная к этому управляющему элементу (17) в дополнительном рабочем режиме степень свободы (α, β, ϕ, γ, L, J, H), стреловой системы может быть ограничена или ограничивается.
20. Кран по любому из предыдущих пунктов, причем крановый контроллер (6) в другом рабочем режиме предназначен для осуществления свободного управления стреловой системой на основании вводимых пользователем управляющих команд, причем исходя из режима координатного управления переход в следующий рабочий режим происходит так долго, пока задаваемый или заданный управляющий элемент (17) кранового контроллера (6), предпочтительно аварийный блокиратор кранового контроллера (6), остается приведенным в действие пользователем.
21. Транспортное средство (19) с краном (1) по любому из предыдущих пунктов.
| DE 202016008565 U1, 26.08.2018 | |||
| WO 2015113084 A1, 06.08.2015 | |||
| US 2012095653 A1, 19.04.2012. |

