Настоящее изобретение касается кранового контроллера с признаками ограничительной части п. 1 формулы изобретения, крана, в частности погрузочного крана, имеющего такой крановый контроллер, а также автомобиля, имеющего такой кран.
Все краны имеют рабочий режим, в котором пользователем может свободно изменяться геометрия крана, то есть относительное положение стрел крана друг к другу в плоскости или, соответственно, относительно мачты крана и положение наклона стрел крана вместе с мачтой крана относительно основания крана. Пользователь может, например, используя элементы управления, изменять относительное положение стрел крана и поворачивать стрелы крана вместе с мачтой крана относительно основания крана. В фоновом режиме работа крана контролируется устройствами безопасности, которые вмешиваются при использовании пользователем элементов управления, приводящих к критичному для безопасности состоянию. Например, может контролироваться устойчивость крана.
Уже стали известны родственные краны, у которых крановый контроллер имеет первый рабочий режим, при котором пользователь имеет возможность свободного управления краном посредством команд управления, и второй, активируемый пользователем рабочий режим, при котором имеется возможность изменения геометрии крана управлением в предопределенной серии движений. Второй рабочий режим служит для того, чтобы предопределенным образом приводить кран из парковочного положения в рабочее положение или, соответственно, предопределенным образом приводить кран, при необходимости из предопределенного, рабочего положения в парковочное положение.
Эти родственные краны в качестве элемента управления имеют выключатель по схеме «мертвого оператора», который должен быть постоянно нажат для активирования второго рабочего режима и для сохранения второго рабочего режима.
Задачей изобретения является предоставить крановый контроллер указанного типа, кран, имеющий такой крановый контроллер, и автомобиль, имеющий такой кран, который допускает удобный и поддерживающий пользователя режим с помощью предопределенной серии движений с целью достижения парковочного или, соответственно, рабочего положения.
Эта задача решается с помощью кранового контроллера с признаками п. 1 формулы изобретения, крана, имеющего такой крановый контроллер, по п. 23 формулы изобретения, и автомобиля, имеющего такой кран, по п. 24 формулы изобретения.
Благодаря тому, что крановый контроллер имеет управляемый посредством меню пользовательский интерфейс, причем этот управляемый посредством меню пользовательский интерфейс имеет выбираемую пользователем функцию, с помощью которой крановый контроллер переходит из первого во второй рабочий режим, достигаются цели поставленной задачи.
Предпочтительные варианты осуществления изобретения определены в зависимых пунктах формулы изобретения.
Кроме того, предпочтительно предусмотрено, что крановый контроллер для достижения парковочного положения или, соответственно, рабочего положения в предопределенной серии движений геометрии крана одновременно учитывает и соответственно настраивает и позиционирует 2-ю сочлененную стрелу (англ. FlyJib, гусек стрелы).
Особенно предпочтительно, кроме того, что крановый контроллер при имеющейся 2-й сочлененной стреле (Fly-Jib или других определяемых конфигурациях крана) автоматически настраивает в предопределенной серии движений геометрии крана различные промежуточные положения, а также различные рабочие положения, и при этом эта предопределенная серия движений геометрии крана описывает зависящую от конфигурации крана траекторию.
Также может быть предусмотрено, чтобы посредством отображения присвоенных рычагам функций, соответствующего активирования и деактивирования элементов управления крановым контроллером уменьшалась опасность нежелательных ошибок управления со стороны пользователя, что повышает безопасность.
В одном из особенно предпочтительных примеров осуществления предусмотрено, что в какой угодно момент времени, в то время как крановый контроллер находится во втором рабочем режиме, при использовании выключателя (например, выключатель по схеме «мертвого оператора» на пульте управления), крановый контроллер делает паузу в серии изменений геометрии крана, и всем элементам управления возвращаются первоначально присвоенные им функции. При этом пользователь может вручную выполнять необходимую корректировку геометрии крана (например, объезжать препятствие). По окончании использования выключателя все элементы управления снова самостоятельно блокируются крановым контроллером, и возможно только задание скорости, чтобы после повторного и положительного контроля безопасности крановым контроллером можно было продолжать прерванную задачу.
Предпочтительно предусмотрено, что крановый контроллер при предопределенной серии движений геометрии крана всегда включает парковочное положение крана из предопределенного направления вращения мачты крана относительно основания крана. Так может гарантироваться, чтобы для компенсации возможных допусков размеров мачта крана всегда двигалась в парковочное положение из одного и того же направления вращения, а также, дополнительно, из одного и того же углового диапазона.
Другие преимущества и подробности изобретения, а также разные варианты осуществления рассматриваются при помощи имеющихся фигур. При этом показано:
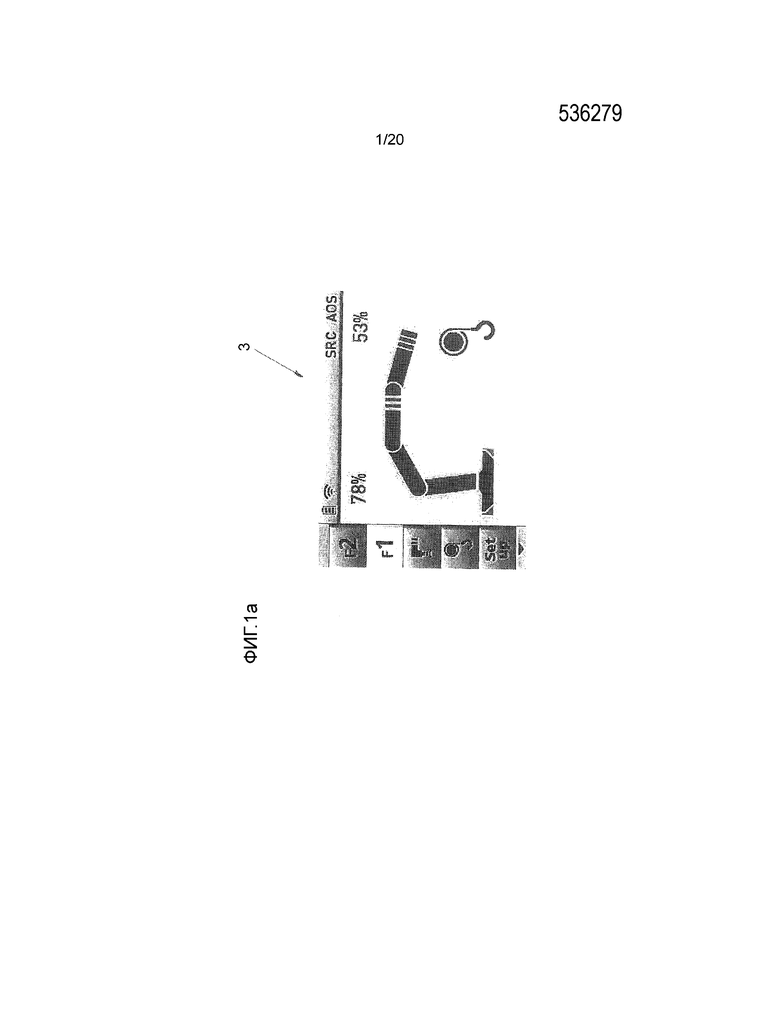
фиг. 1a: главное меню управляемого посредством меню пользовательского интерфейса кранового контроллера в соответствии с изобретением;
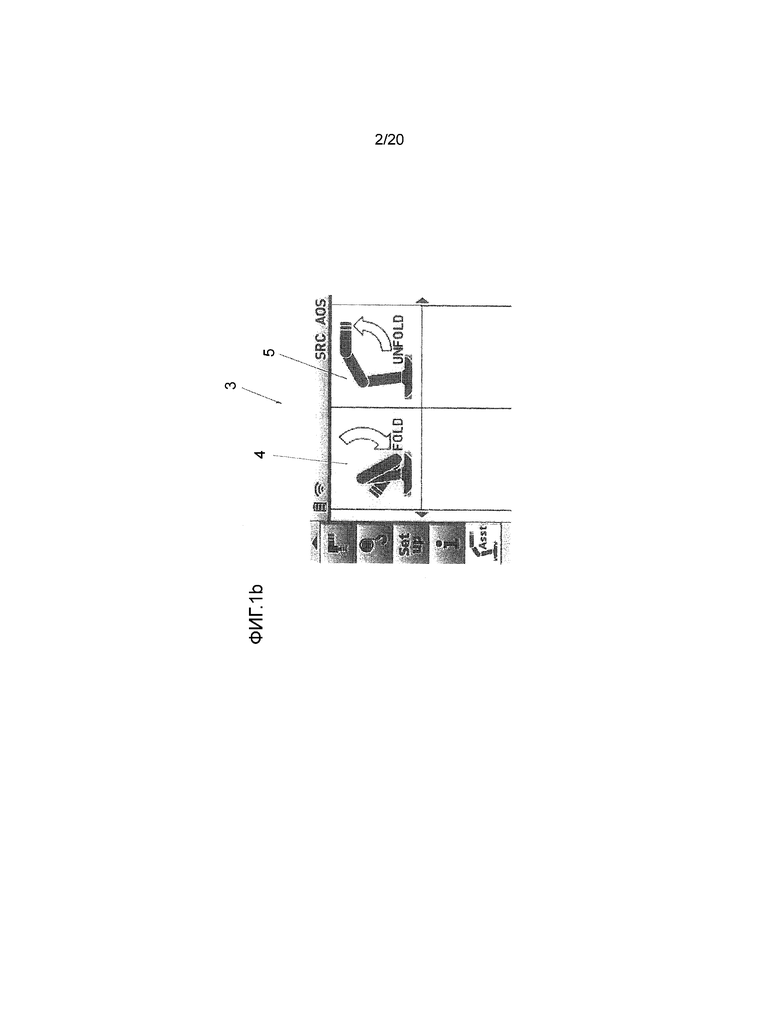
фиг. 1b: подменю главного меню фиг. 1a;
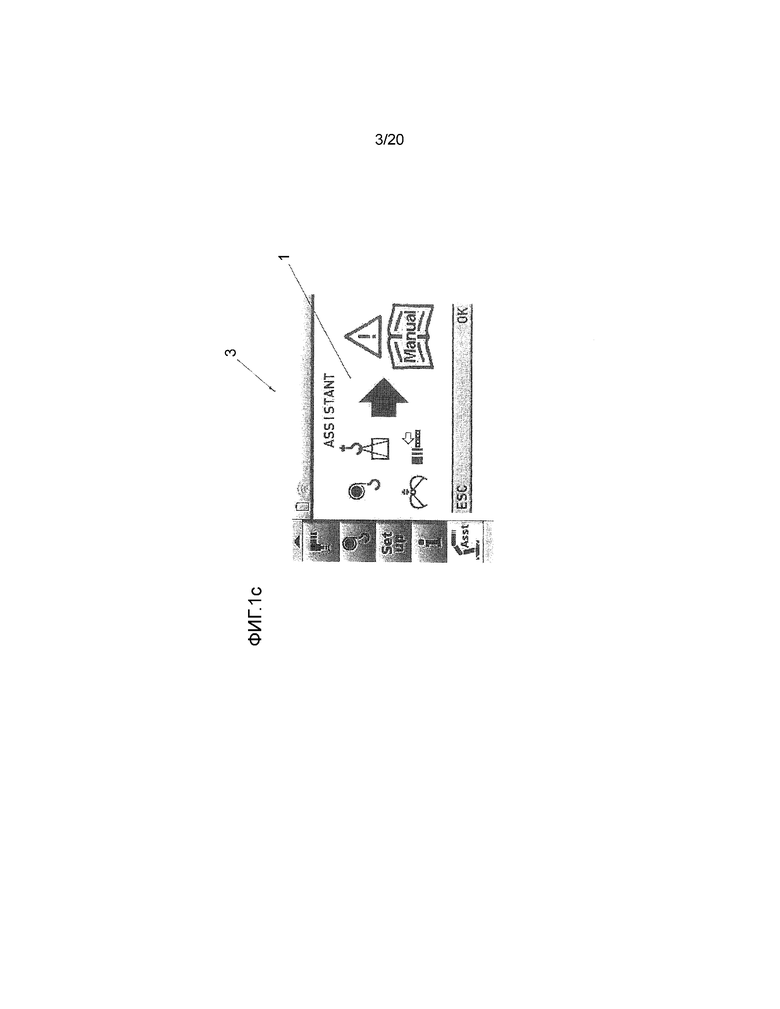
фиг. 1c: контрольный запрос управляемого посредством меню пользовательского интерфейса;
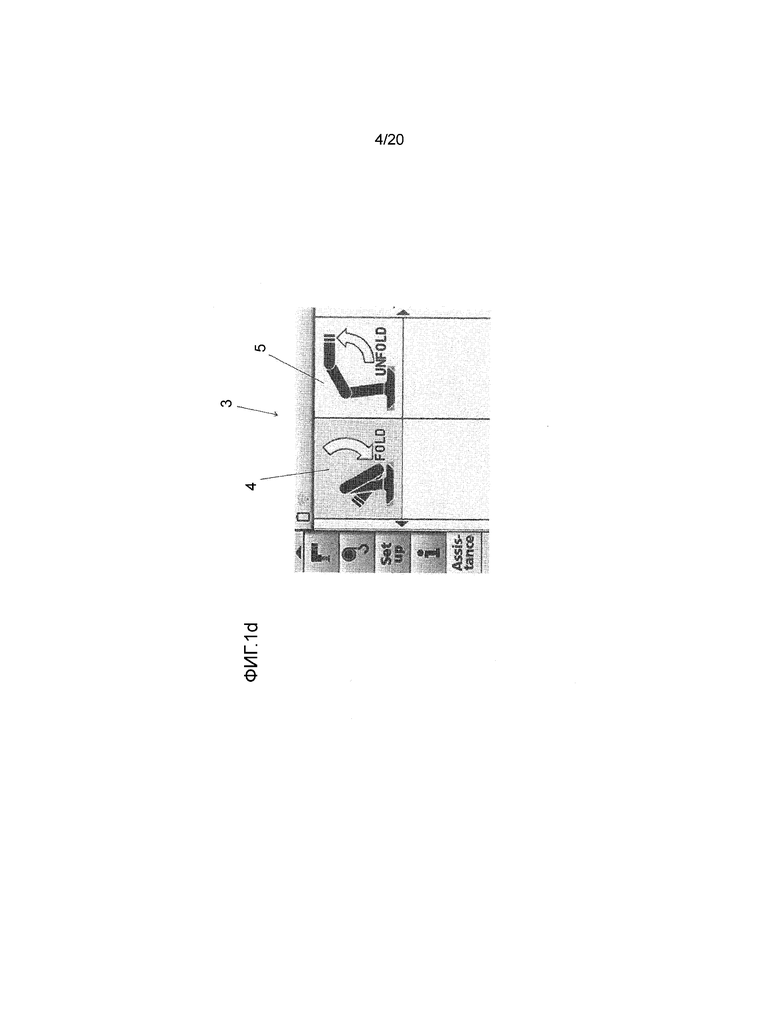
фиг. 1d: другой вариант осуществления подменю главного меню фиг. 1a;
фиг. 1e: другой вариант осуществления контрольного запроса управляемого посредством меню пользовательского интерфейса;
фиг. 1f: другой вариант осуществления подменю главного меню фиг. 1a;
фиг. 1g: другой вариант осуществления контрольного запроса управляемого посредством меню пользовательского интерфейса;
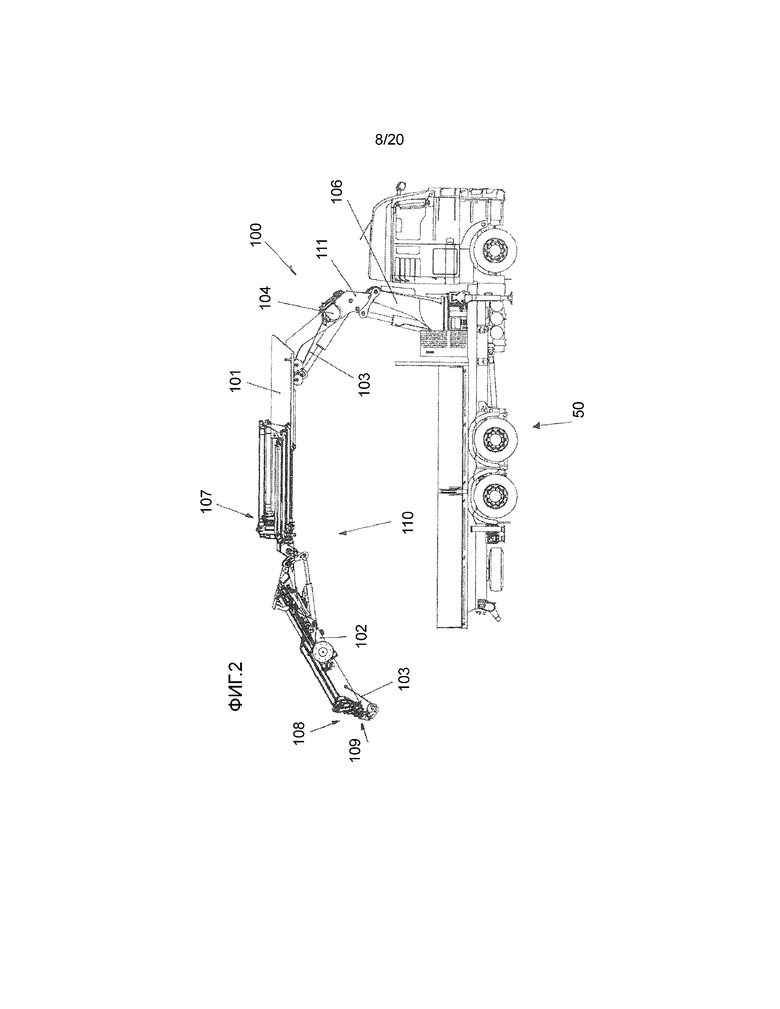
фиг. 2: изображение в перспективе автомобиля с установленным на нем краном;
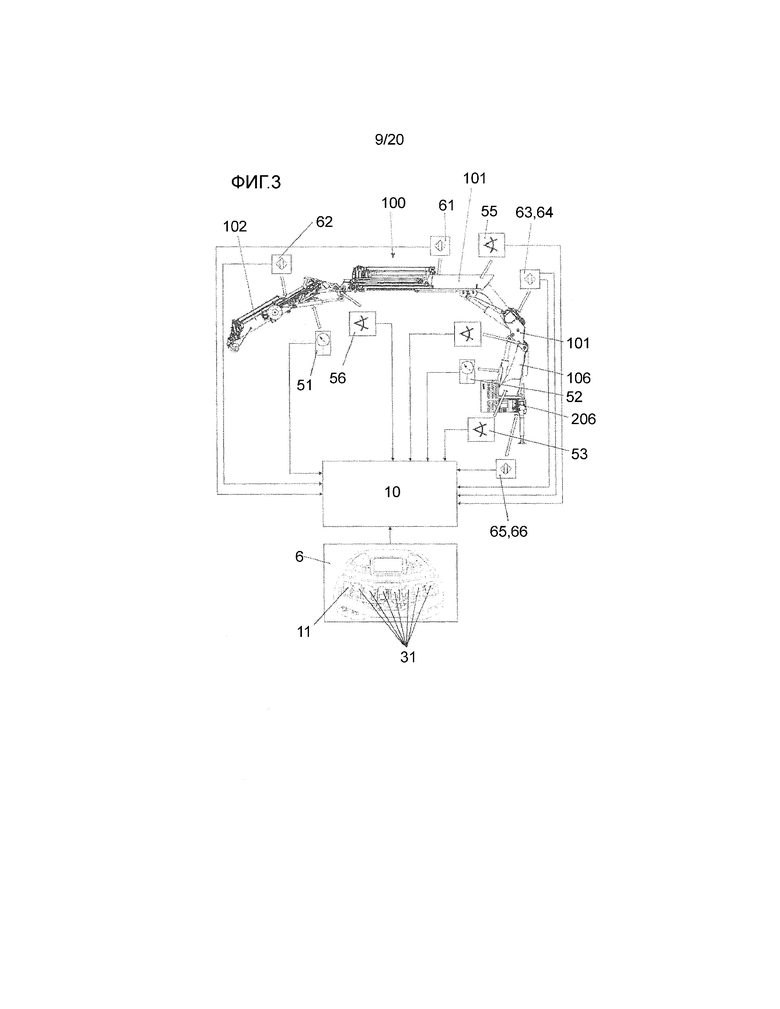
фиг. 3: пульт управления для обслуживания предлагаемого изобретением кранового контроллера и схематично крановый контроллер, имеющий сенсорику крана;
фиг. 4a-4g: схематично серия изменений геометрии крана, сделанная предлагаемым изобретением крановым контроллером, который находится во втором рабочем режиме, начиная от рабочего положения и заканчивая парковочным положением;
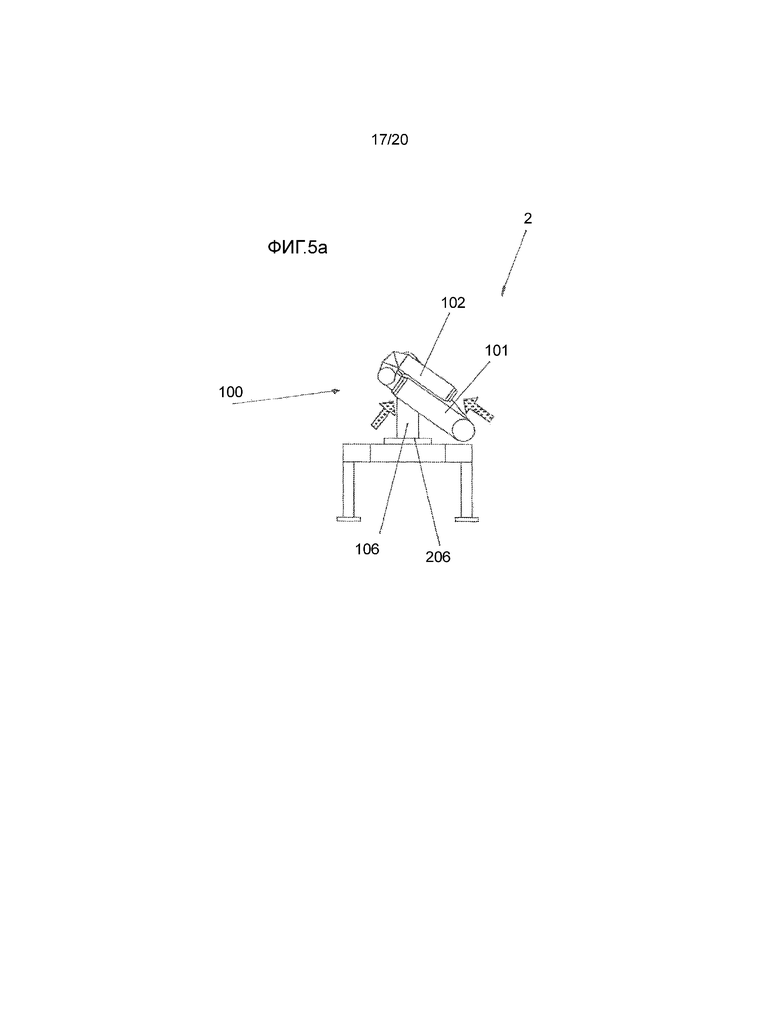
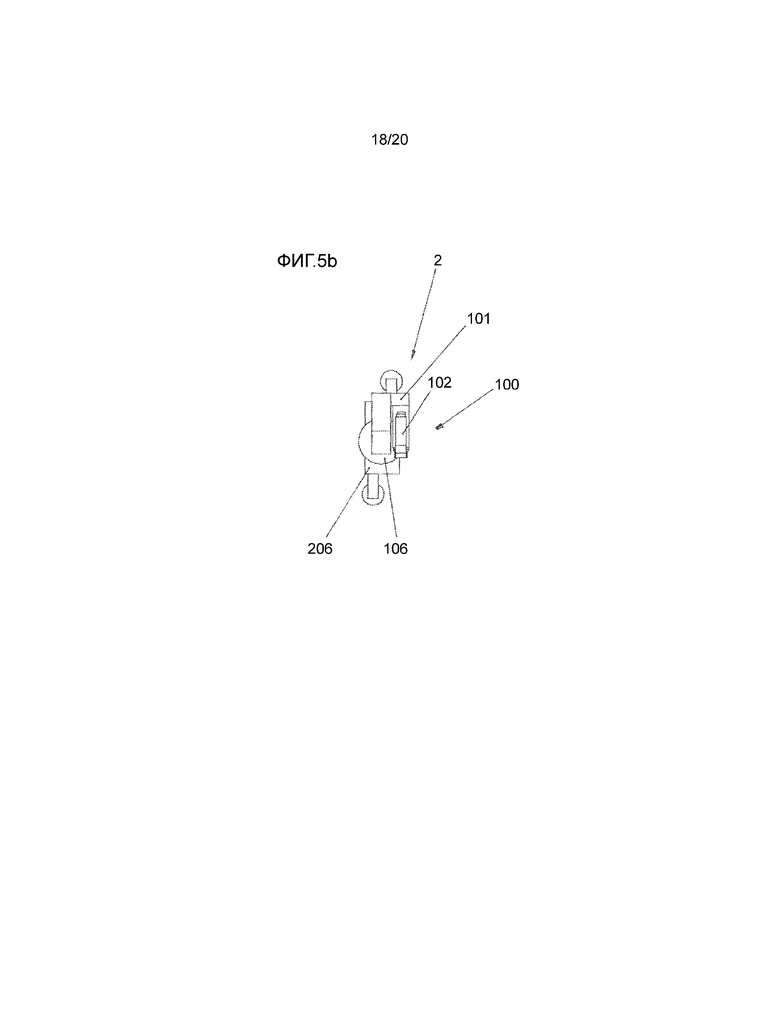
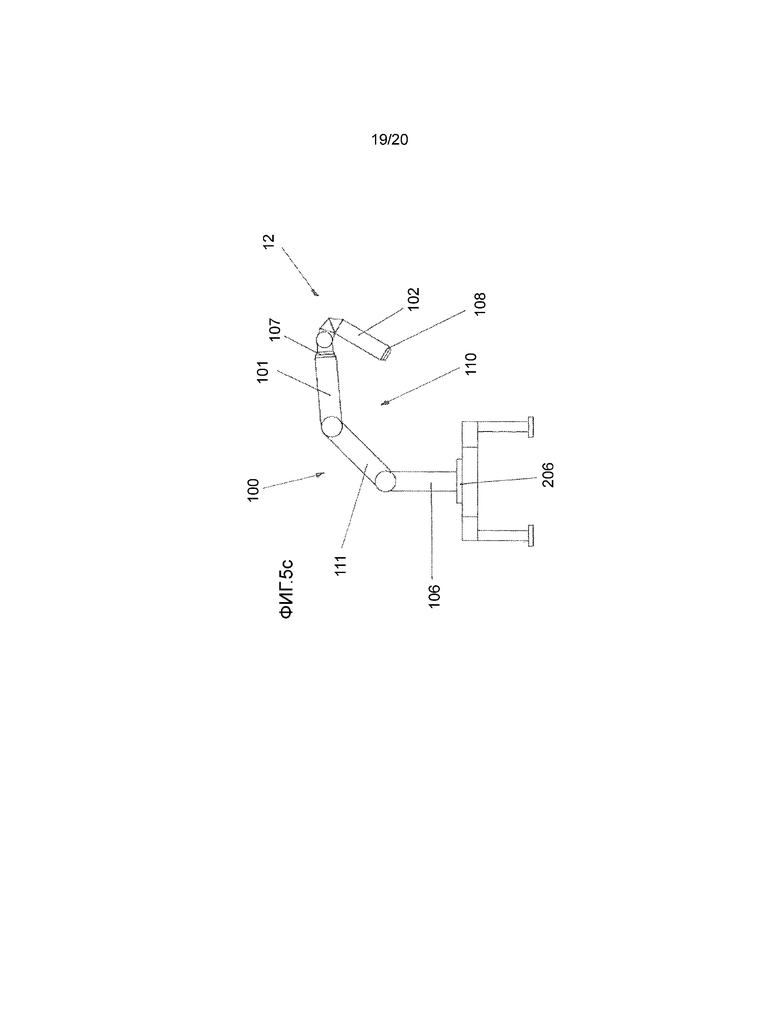
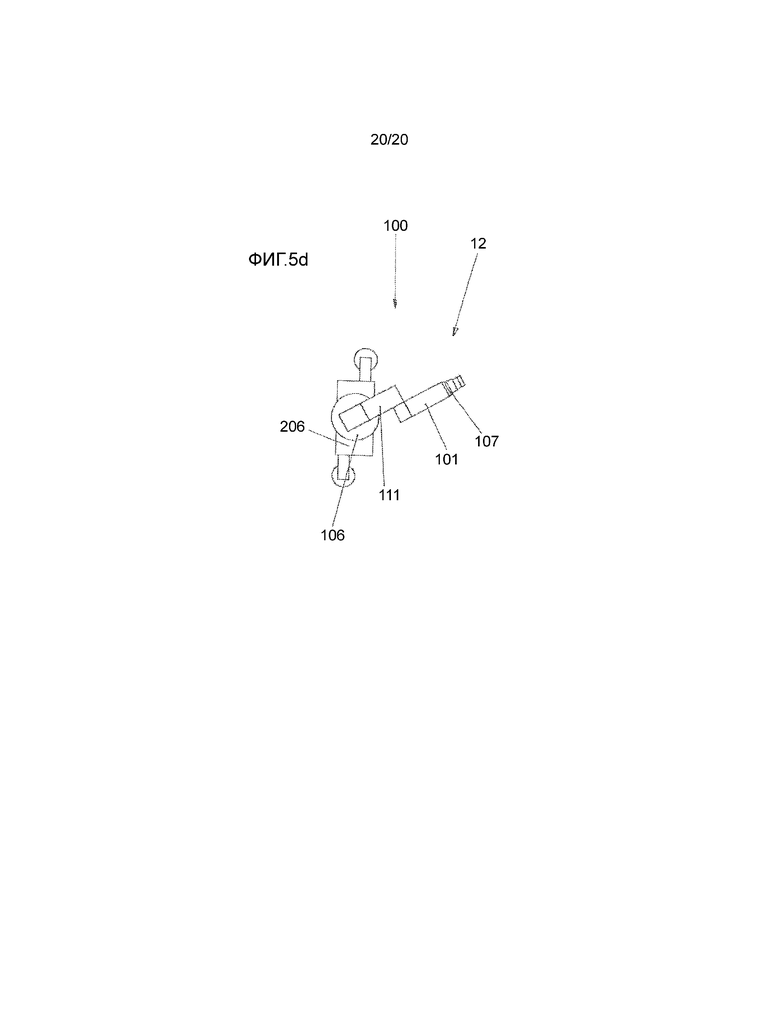
фиг. 5a-5d: схематично серия изменений геометрии крана, сделанная предлагаемым изобретением крановым контроллером, который находится во втором рабочем режиме, начиная от парковочного положения и заканчивая рабочим положением.
На фиг. 1a показано главное меню управляемого посредством меню пользовательского интерфейса кранового контроллера. Главное меню имеет выбираемые пункты подменю, в этом предпочтительном примере осуществления расположенный на левом крае главного меню ленту меню. В подменю «активирование второго рабочего режима» (фиг. 1b) попадают путем выбора соответствующей иконки.
На фиг. 1b показаны две альтернативы для активирования второго рабочего режима, то есть «парковочное положение» и «рабочее положение». Выбор альтернативы «парковочное положение» после положительно законченной проверки ситуации безопасности, в частности текущей геометрии крана и состояния оснащения крана, крановым контроллером и пользователем вызывает некоторую серию изменений геометрии крана, начиная от «рабочего положения» и заканчивая «парковочным положением». Выбор альтернативы «рабочее положение» после положительно законченной проверки ситуации безопасности, в частности текущей геометрии крана и состояния оснащения крана, крановым контроллером и пользователем вызывает некоторую серию изменений геометрии крана, начиная от «парковочного положения» и заканчивая «рабочим положением».
На фиг. 1c показан контрольный запрос управляемого посредством меню пользовательского интерфейса, который в этом примере осуществления появляется при переходе от поступательной к вращательной фазе движения изменения геометрии крана. В связи с этим делается пауза в изменении геометрии крана. При этом крановый контроллер пребывает во втором рабочем режиме и ждет подтверждения пользователем. Смысл и цель этого контрольного запроса в этом примере осуществления заключается в том, чтобы побудить пользователя к визуальной проверке ситуации безопасности. Это может, например, содержать в себе:
- проверку состояния оснащения крана в отношении самостоятельно нерегистрируемых крановым контроллером дополнительной оснастки или грузов, например, если необходимое средство приема груза уже демонтировано, находится ли еще на кране груз?
- проверку состояния оснащения направляющей грузоподъемного каната и его канатной лебедки;
- проверку крана на полностью втянутые системы выдвижения и выдвигаемые вручную продолжения вылета (крана и необходимого гуська стрелы);
- проверку условий пространства. Имеется ли в распоряжении достаточно места для выполнения серии изменений геометрии крана в «парковочное положение» или, соответственно, «рабочее положение»?
После осуществленного подтверждения пользователем крановый контроллер продолжает отработку остальной серии изменений геометрии крана с целью достижения желаемого конечного положения. Пока подтверждение пользователем не осуществлено, крановый контроллер пребывает во втором рабочем режиме, но не инициирует никакие движения. Если в пределах заданного промежутка времени подтверждение пользователем не происходит, функция прерывается, и крановый контроллер заканчивает второй рабочий режим. Для перехода в первый рабочий режим в этом предпочтительном примере снова необходимо подтверждение пользователем.
На фиг. 1d показан другой вариант осуществления подменю, имеющего две альтернативы для активирования второго рабочего режима, которые снова включают в себя «парковочное положение» и «рабочее положение».
На фиг. 1e показана другая возможность осуществления контрольного запроса управляемого посредством меню пользовательского интерфейса.
На фиг. 1f показан другой возможный вариант осуществления подменю, имеющего две альтернативы для активирования второго рабочего режима, которые снова включают в себя «парковочное положение» и «рабочее положение».
На фиг. 1g показан другой вариант осуществления контрольного запроса управляемого посредством меню пользовательского интерфейса.
На фиг. 2 показан вид сбоку автомобиля 50, на котором установлен автокран 100. При этом крановая система 110 автокрана 100 имеет подъемную стрелу 111 и сочлененную стрелу 101. На подъемной стреле 111 в этом предпочтительном примере осуществления установлена канатная лебедка 104. Эта канатная лебедка 104 служит для подъема грузов посредством грузоподъемного каната 103.
На сочлененной стреле 101, которая выполнена телескопической, выполнена шарнирно установленная вторая сочлененная стрела, которая выполнена здесь в виде гуська 102 стрелы. При этом сочлененная стрела 101 имеет несколько продолжений 107 вылета, а гусек 102 стрелы тоже имеет несколько продолжений 108 вылета. Конец крановой системы 110 образует вершину 109 крана. При этом следует заметить, что в этом примере осуществления речь идет об одном из вариантов крановой системы 110 автокрана 100, конечно, возможен также любой другой вариант осуществления крановой системы 110, такой как, например, крановая система 110, имеющая телескопическую подъемную стрелу.
На фиг. 3 показан пульт 6 управления для управления предлагаемым изобретением управлением 10 крана и схематично крановый контроллер 10. Пульт 6 управления имеет здесь предпочтительно дистанционное управление. После выбора пользователем одной из двух альтернатив «парковочное положение» 4 и «рабочее положение» 5 крановый контроллер 10 самостоятельно проверяет, имеются ли, насколько это позволяет регистрировать крановый контроллер 10, препятствия в отношении безопасности для активирования второго рабочего режима.
Например, крановый контроллер 10 проверяет, подходит ли вообще имеющаяся геометрия крана с точки зрения безопасности в качестве исходной точки для предопределенной серии изменений геометрии крана в «парковочное положение» 4 или, соответственно, «рабочее положение» 5. Если кран 100 находится в рабочем положении, например, проверяется, лежит ли угол между крайней наружной стрелой крана 100 и мачтой 106 крана в определенном диапазоне. Может также проверяться, лежит ли угол поворота мачты 106 крана относительно основания 206 крана в пределах определенного диапазона. Кроме того, крановым контроллером 10 может проверяться, находится ли на кране 100 рабочая клеть. Для всех этих функций может применяться общеизвестная сенсорика родственного крана 100.
До сих пор все рычаги 11, 31 управления находятся в распоряжении пользователя для свободного управления в соответствии с предусмотренными заводом присвоенными функциями.
Когда все рычаги 11, 31 управления находятся в нулевом положении, и пользователь дал свое согласие, то все рычаги 31 управления блокируются, за исключением одного, этот не заблокированный рычаг 11 управления после активирования второго рабочего режима служит для того, чтобы пользователь путем отклонения рычага 11 управления от нулевого положения мог выбирать скорость, с которой изменяется геометрия крана.
На оставшихся двух фигурах уже изображается, как конкретно в этом примере осуществления осуществляется заданная серия изменения геометрии крана.
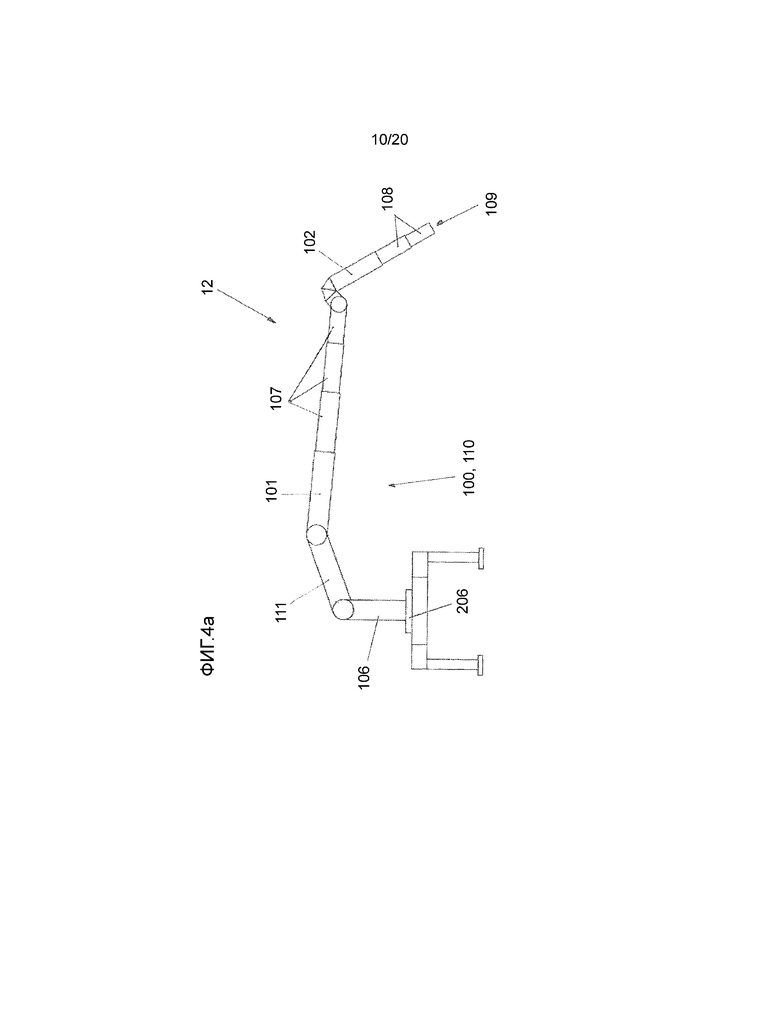
На фиг. 4a схематично показан кран 100 в рабочем положении 12 с выдвинутыми системами 107 выдвижения сочлененной стрелы 101 и 108 гуська стрелы 102. На фиг. 4a не видно (но см. на фиг. 2), что имеется также канатная лебедка 104 в рабочем положении с запасованным канатом 103.
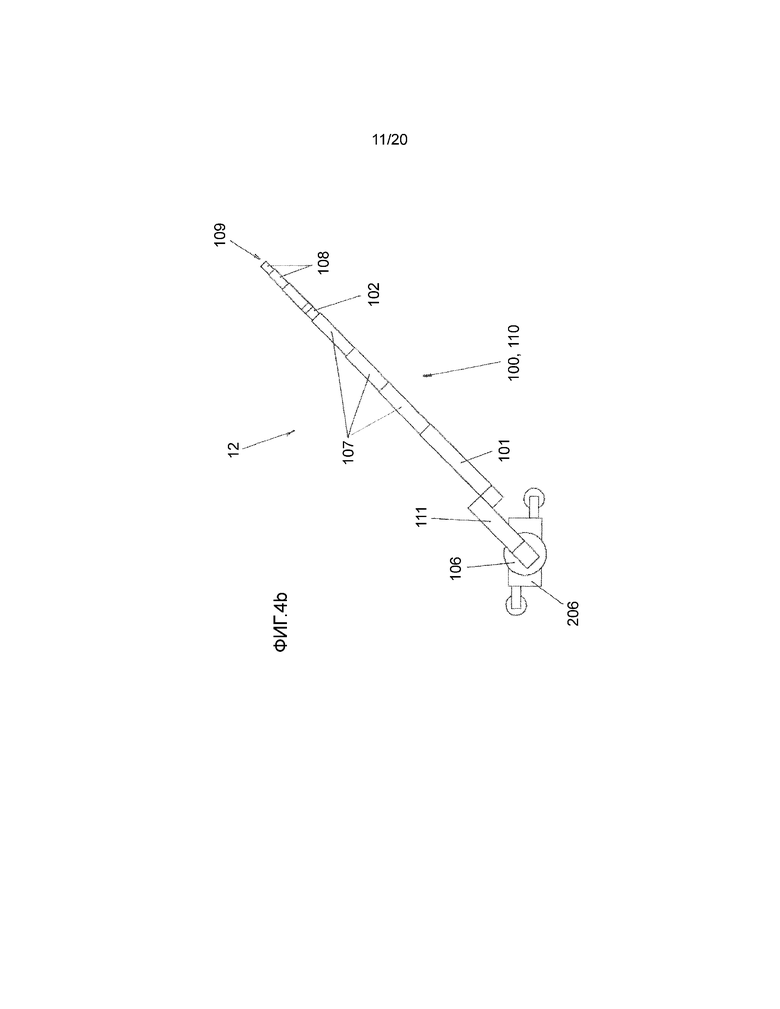
На фиг. 4b показан кран 100 в изображенном на фиг. 4a рабочем положении 12 сверху, чтобы изобразить состояние поворота мачты 106 крана относительно основания 206 крана.
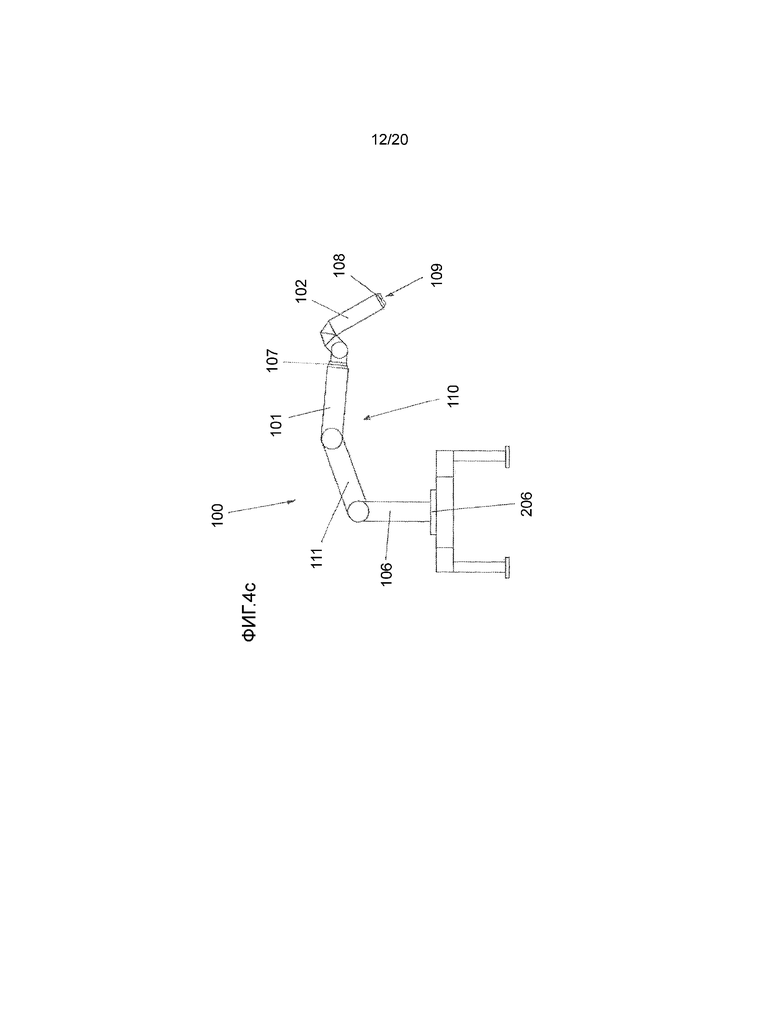
На фиг. 4c после осуществленного активирования второго рабочего режима показана та геометрия крана, которая получается после втягивания крановой системы 110 и гуська стрелы 102. Поступательные изменения геометрии крана на этом закончены. До этих пор еще не осуществляются вращательные изменения геометрии крана (изменение состояния поворота мачты 106 крана относительно основания 206 крана, изменение относительного угла между стрелами 101, 102, 111 крана).
Теперь в этом примере осуществления осуществляется контрольный запрос 1 кранового контроллера 10 пользователю, как изображено на фиг. 1c.
В дальнейшем примем, что на контрольный запрос 1 был дан положительный ответ.
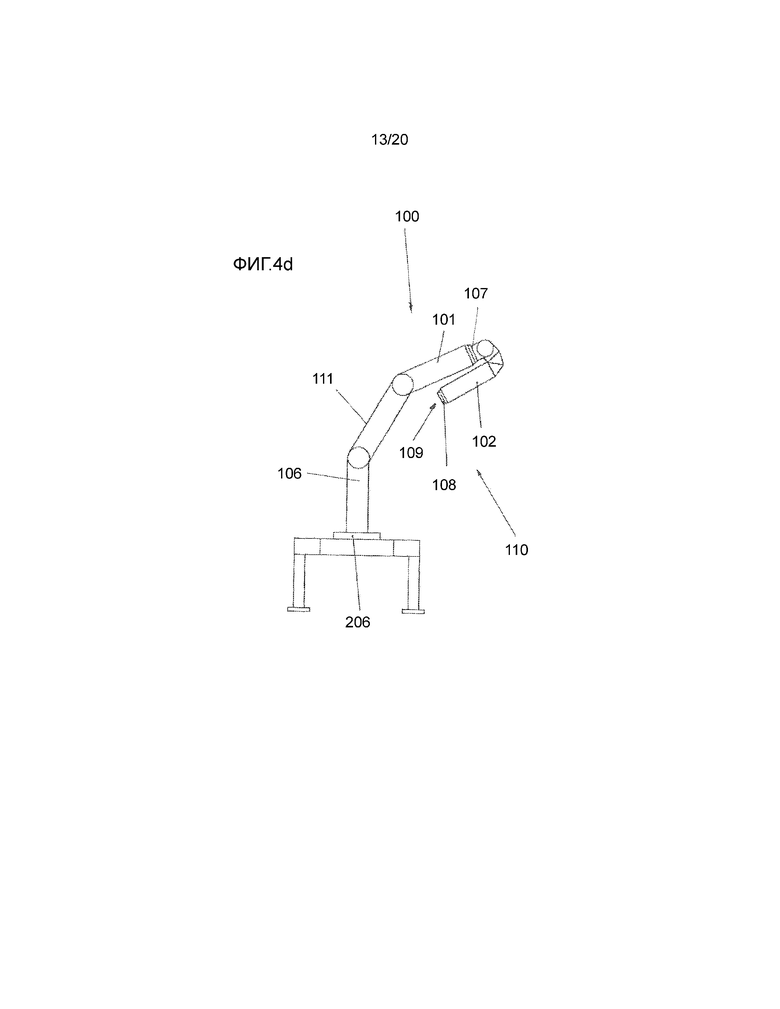
Теперь осуществляется изменение относительного угла между стрелами крана без изменения состояния поворота мачты крана относительно основания крана (фиг. 4d). В этом определенном промежуточном положении крана с помощью сенсора 52 давления выполняется оценка достоверности загруженности крана, которая, в зависимости от обнаруживаемой крановым контроллером конфигурации крана (напр., смонтирован гусек стрелы или нет) должна лежать ниже заданных предельных значений.
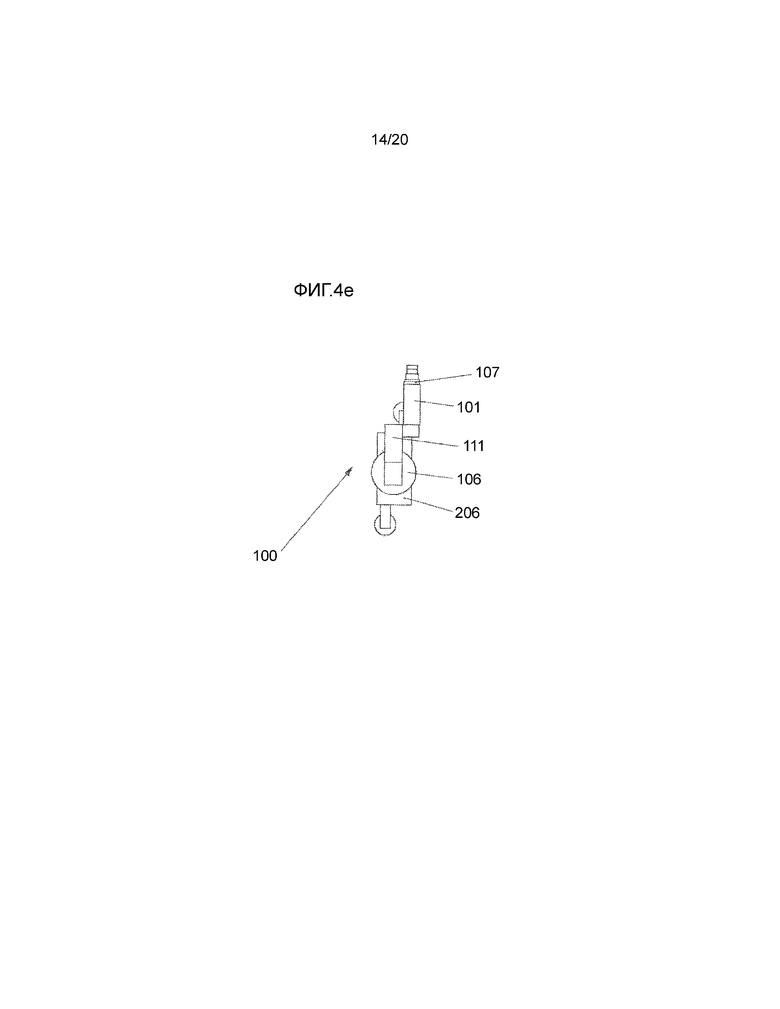
На фиг. 4e показана геометрия крана после осуществленного изменения угла поворота мачты крана относительно основания крана. При переходе от фиг. 4d к фиг. 4e канатная лебедка тоже поворачивается в парковочное положение.
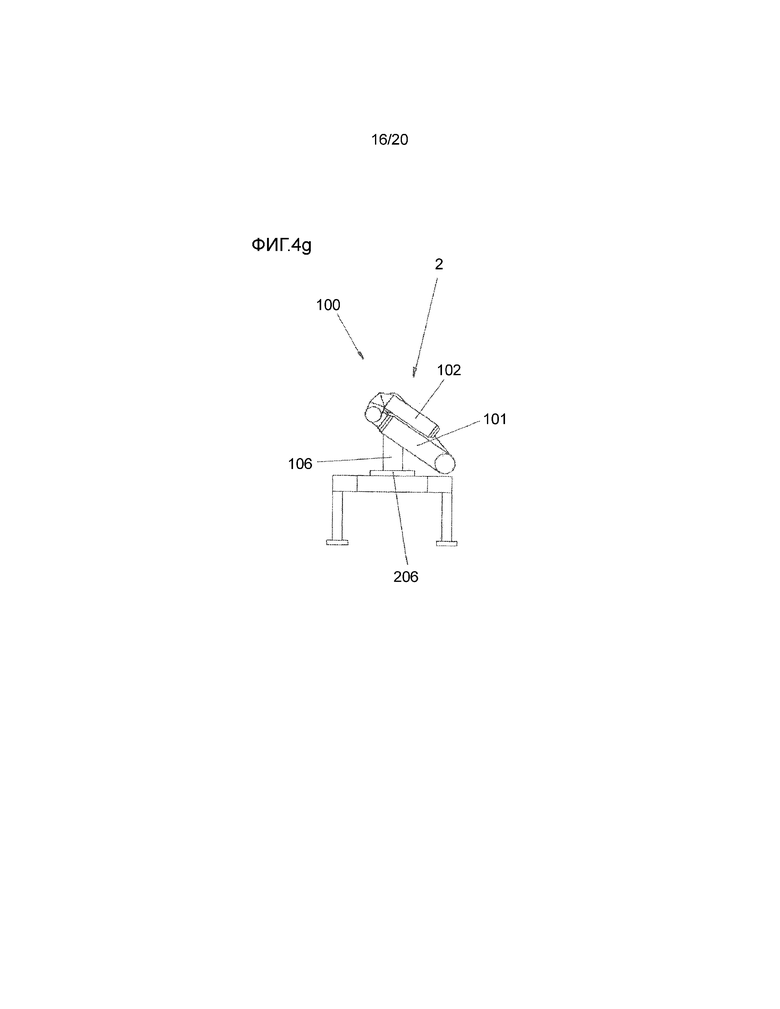
На фиг. 4g показано изменение относительного угла между стрелами 101, 102, 111 крана в парковочное положение 2. Незадолго до достижения парковочного положения 2 осуществляется предпочтительно переключение с регулирования положения с помощью сенсоров 54 и 56 на регулирование давления с помощью сенсоров 51 и 52 давления, чтобы обойти возможный зазор стрел 102, 11 или неточность регулирования положения. Отключение осуществляется при достижении заданного уровня давления.
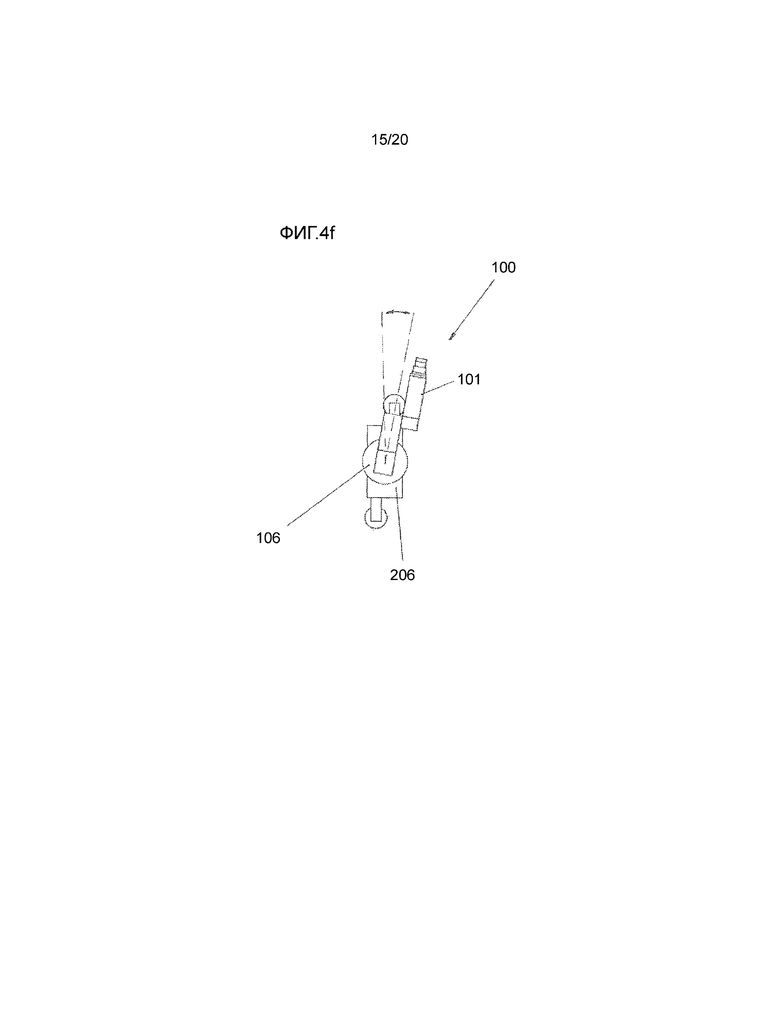
Конечно, существует также определенный зазор в отношении изменения угла между мачтой 106 крана и основанием 206 крана, из-за чего предпочтительно предусмотрено, что поворот мачты 106 крана относительно основания 206 крана всегда осуществляется из одного и того же углового диапазона (фиг. 4f), то есть если мачта 106 крана приближается к парковочному положению из другого углового диапазона, то она проезжает его, чтобы получить возможность двигаться в парковочное положение 2 из упомянутого одного и того же углового диапазона (см. фиг. 4f).
На фиг. 5, аналогично фиг. 4, показан предопределенный переход из парковочного положения 2 в рабочее положение 12.
Во время предопределенной серии движений геометрии крана автоматически компенсируется обусловленное ею изменение длины запасованного грузоподъемного каната 103 канатной лебедки 104, при этом натяжение каната регулируется крановым контроллером 10. Тем самым предотвращается как образование провисаний каната, так и ситуация перегрузки канатной лебедки 104.
Кроме того, предусмотрено, что крановый контроллер 10 выполняет автоматическое гидравлическое предварительное натяжение различных систем 107 и 108 выдвижения, а также, кроме того, подъемных цилиндров для поворота стрел 101 и 102 крана.
В какой угодно момент времени, в то время как крановый контроллер 10 находится во втором рабочем режиме, может использоваться выключатель (выключатель по схеме «мертвого оператора»), что приводит к тому, что крановый контроллер 10 делает паузу в серии изменений геометрий крана и деблокирует все рычаги 11, 31 управления. При этом пользователь может вручную выполнять необходимую корректировку геометрии крана (например, объезжать препятствие). После ручной корректировки и деблокировки схемы «мертвого оператора» пользователем крановый контроллер 10 снова начинает проверку безопасности имеющейся в данный момент геометрии крана и при необходимости возобновляет прерванную серию.
Кроме того, предусмотрено, что крановый контроллер 10 также самостоятельно регулирует в сторону уменьшения скорость перемещения или, соответственно, поворота геометрии крана. Это целесообразно в особенности тогда, когда кран 100, например, приближается к предельной области устойчивости, концевым упорам или устанавливаемым электроникой областям блокирования.
Предпочтительно крановый контроллер 10, наряду с текущей геометрией крана, распознает также состояние опоры и может, таким образом, оценивать или, соответственно, констатировать, обеспечена ли устойчивость крана 100.
Как отдельные промежуточные положения во время предопределенной серии движений с целью достижения парковочного или рабочего положения, так и само рабочее положение зависимы от конфигурации крана, обнаруживаемой посредством кранового контроллера (10) крана. Под этим следует понимать, что крановый контроллер (10) вмешивается в разные наборы параметров в зависимости от специальной оснастки, в частности, что касается номинальных значений регулирования положения для сенсоров 54-56.
Вышеназванное описание применительно к серии последовательностей изменения геометрии крана относится к одному из особенно предпочтительных примеров осуществления. Однако кроме этого, может изменяться сама серия и устанавливаться дополнительные предпочтительные парковочные и рабочие положения.
Так, предпочтительно предусмотрено, что предварительно определяемые пользователем последовательности могут вводиться в крановый контроллер 10, при этом подразумевается, что выполнять это могут, например, сервисные мастерские. В целях безопасности при этом предусмотрено, что мастерские или, соответственно, пользователь сможет выбирать или, соответственно, изменять эти последовательности только из заданного диапазона значений или, соответственно, влияние возможно также только на очередности серии движений.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН С КРАНОВЫМ КОНТРОЛЛЕРОМ | 2020 |
|
RU2772140C1 |
| Кран | 2018 |
|
RU2683918C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАГРУЗКИ, БЛОК УПРАВЛЕНИЯ ДЛЯ ГИДРАВЛИЧЕСКОГО ПОДЪЕМНОГО УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ТАКОГО СПОСОБА | 2017 |
|
RU2714833C1 |
| СПОСОБ УПРАВЛЕНИЯ И/ИЛИ РЕГУЛИРОВАНИЯ СВЯЗАННОГО С ТРАНСПОРТНЫМ СРЕДСТВОМ ПОДЪЕМНОГО УСТРОЙСТВА | 2022 |
|
RU2819298C2 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2019 |
|
RU2737758C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И ГРУЗОВОЙ КРАН С УСТРОЙСТВОМ УПРАВЛЕНИЯ | 2018 |
|
RU2737639C1 |
| СТРОИТЕЛЬНАЯ МАШИНА, В ЧАСТНОСТИ ЗЕМЛЕРОЙНО-ТРАНСПОРТНАЯ МАШИНА С ПУЛЬТОМ ОБСЛУЖИВАНИЯ | 2018 |
|
RU2781962C2 |
| СИСТЕМА УПРАВЛЕНИЯ ОТКРЫВАЮЩИМИСЯ ЭЛЕМЕНТАМИ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СПОСОБ УПРАВЛЕНИЯ ИМИ | 2016 |
|
RU2718195C2 |
| ПАРКОВОЧНАЯ СИСТЕМА НА ОСНОВЕ QR-КОДА И СПОСОБ УПРАВЛЕНИЯ ПАРКОВОЧНОЙ СИСТЕМОЙ | 2021 |
|
RU2763605C1 |
| СПОСОБ МОНТАЖА КРАНА | 2016 |
|
RU2728920C2 |
Предложен крановый контроллер для погрузочного крана, имеющий первый рабочий режим, при котором у пользователя имеется возможность свободного управления краном посредством команд управления, и второй, активируемый пользователем рабочий режим, при котором имеется возможность изменения геометрии крана крановым контроллером в предопределенной серии движений. Крановый контроллер имеет управляемый посредством меню пользовательский интерфейс (3). Интерфейс (3) имеет выбираемую пользователем функцию (4, 5), с помощью которой управление крана переходит из первого во второй рабочий режим. Предложены также кран и автомобиль, имеющий кран. Достигается изменение геометрии крана в предопределенной серии движений для перевода крана из парковочного в рабочий режим и обратно. 3 н. и 21 з.п. ф-лы, 20 ил.
1. Крановый контроллер (10) для крана (100), в частности погрузочного крана, имеющий первый рабочий режим, при котором у пользователя имеется возможность свободного управления краном (100) посредством команд управления, и второй, активируемый пользователем рабочий режим, при котором имеется возможность изменения геометрии крана крановым контроллером(10) в предопределенной серии движений, отличающийся тем, что крановый контроллер (10) имеет управляемый посредством меню пользовательский интерфейс (3), причем этот управляемый посредством меню пользовательский интерфейс (3) имеет выбираемую пользователем функцию (4, 5), с помощью которой крановым контроллером (10) переходит из первого во второй рабочий режим.
2. Крановый контроллер по п. 1, отличающийся тем, что крановый контроллер (10) в предопределенной точке предопределенной серии движений выдает контрольный запрос (1), требующий подтверждения пользователем.
3. Крановый контроллер по п. 2, отличающийся тем, что эта предопределенная точка предопределенной серии движений находится на переходе от поступательной во вращательную фазу движения изменения геометрии крана.
4. Крановый контроллер по п. 2, отличающийся тем, что крановый контроллер (10) в предопределенной точке делает паузу в предопределенной серии движений геометрии крана.
5. Крановый контроллер по п. 4, отличающийся тем, что после подтвержденного пользователем контрольного запроса (1) крановый контроллер (10) продолжает предопределенную серию движений геометрии крана.
6. Крановый контроллер по п. 1, отличающийся тем, что крановый контроллер (10) во втором рабочем режиме активирует рычаг (11) управления пульта (6) управления, и имеется возможность изменения управлением (10) крана геометрии крана в предопределенной серии движений с использованием этого одного рычага (11) управления.
7. Крановый контроллер по п. 6, отличающийся тем, что крановый контроллер (10) управляет скоростью при предопределенной серии движений геометрии крана в зависимости от отклонения указанного одного рычага (11) управления пульта (6) управления.
8. Крановый контроллер по п. 6, отличающийся тем, что во втором рабочем режиме крановым контроллером (10) деактивированы другие рычаги (31) управления.
9. Крановый контроллер по п. 6, отличающийся тем, что во втором рабочем режиме при использовании выключателя, предпочтительно выключателя по схеме «мертвого оператора», крановый контроллер (10) делает паузу в серии изменений геометрии крана, и элементам управления пульта (6) управления, включая указанный один рычаг (11) управления, а также другие, деактивированные рычаги (31) управления, возвращаются первоначально присвоенные им функции.
10. Крановый контроллер по п. 9, отличающийся тем, что по окончании использования выключателя крановый контроллер (10) отменяет паузу в серии изменений геометрии крана и активирует указанный один рычаг (11) управления пульта (6) управления, а другие рычаги (31) управления деактивирует.
11. Крановый контроллер по п. 1, отличающийся тем, что крановый контроллер (10) при предопределенной серии движений геометрии крана контролирует устойчивость крана (100) или автомобиля (50), на котором находится кран (100).
12. Крановый контроллер по п. 1, отличающийся тем, что крановый контроллер (10) учитывает в геометрии крана вершину (109) крана.
13. Крановый контроллер по п. 1, отличающийся тем, что требующий подтверждения пользователем контрольный запрос (1) относится к находящимся на кране (100) навесным устройствам и/или к критичному для безопасности состоянию поворота крана (100) в пространстве и/или правильности состояния оснащения крана (100), предпочтительно канатной лебедки (104) и направляющей грузоподъемного каната (103).
14. Крановый контроллер по п. 1, отличающийся тем, что крановый контроллер (10) во время предопределенной серии движений геометрии крана поворачивает и позиционирует вторую сочлененную стрелу, предпочтительно гусек (102) стрелы.
15. Крановый контроллер по п. 1, отличающийся тем, что крановый контроллер (10) во время предопределенной серии движений геометрии крана регулирует натяжение грузоподъемного каната (103).
16. Крановый контроллер по п. 1, отличающийся тем, что крановый контроллер (10) во время предопределенной серии движений геометрии крана поворачивает канатную лебедку (104) грузоподъемного каната (103).
17. Крановый контроллер по п. 1, отличающийся тем, что крановый контроллер (10) с помощью по меньшей мере одного сенсора (52) давления определяет загруженность крана и сравнивает ее, в зависимости от конфигурации крана, с заданными предельными значениями, и при превышении по меньшей мере одного из заданных предельных значений блокирует изменение геометрии крана.
18. Крановый контроллер по п. 1, отличающийся тем, что крановый контроллер (10), в зависимости от конфигурации крана, автоматически настраивает различные промежуточные положения, а также различные рабочие положения в предопределенной серии движений геометрии крана, и при этом предопределенная серия движений геометрии крана описывает зависящую от конфигурации крана, предварительно заданную траекторию.
19. Крановый контроллер по п. 1, отличающийся тем, что крановый контроллер (10) выполняет автоматическое гидравлическое предварительное натяжение по меньшей мере одной системы (107, 108) выдвижения, а также подъемных цилиндров для поворота стрел (101, 102) крана.
20. Крановый контроллер по п. 1, отличающийся тем, что крановый контроллер (10) регулирует положение геометрии крана по сенсорам (51-56, 61-66), причем до достижения определенного положения крана (100), предпочтительно парковочного положения (2), крановый контроллер (10) производит переключение с регулирования положения на регулирование давления по сенсору (52) давления и перемещает кран (100) посредством регулирования давления в определенное положение, предпочтительно парковочное положение (2).
21. Крановый контроллер по п. 1, отличающийся тем, что крановый контроллер (10) в предопределенной серии движений геометрии крана всегда включает парковочное положение (2) крана (100) из предопределенного направления вращения мачты (106) крана (100) относительно основания (206) крана (100).
22. Крановый контроллер по п. 1, отличающийся тем, что крановый контроллер (10) автоматически изменяет геометрию крана в предопределенной серии движений.
23. Кран (100), в частности погрузочный кран, имеющий крановый контроллер (10) по п. 1.
24. Автомобиль (50), имеющий кран (100), в частности погрузочный кран, по п. 23.
| СПОСОБ ПРИГОТОВЛЕНИЯ МУЧНОГО КОНДИТЕРСКОГО ИЗДЕЛИЯ, ПОКРЫТОГО ГЛАЗУРЬЮ | 2008 |
|
RU2388228C2 |
| US 5731974 A, 24.03.1998 | |||
| DE 202010014309 U1, 18.01.2012. | |||

