Изобретение касается способа управления и/или регулирования связанного с транспортным средством подъемного устройства, включающего в себя систему шарнирно-сочлененной крановой стрелы, имеющую вершину крана и основание крана, с учетом найденного положения по меньшей мере одной точки этой системы крановой стрелы, в частности вершины крана, причем при определении положения указанной по меньшей мере одной точки учитывается деформация системы крановой стрелы, получающаяся под воздействием динамических и/или статических сил. Также изобретение касается устройства управления и/или регулирования для связанного с транспортным средством подъемного устройства с признаками ограничительной части пункта 22 формулы изобретения. Также изобретение касается связанного с транспортным средством подъемного устройства, имеющего по меньшей мере одно такое устройство управления и/или регулирования, а также компьютерного программного продукта для выполнения такого способа.
Один из таких способов уже известен из публикации EP 2 636 634 B1, при этом система крановой стрелы подъемного устройства моделируется балочной моделью, чтобы можно было находить деформацию системы крановой стрелы, при этом определяется положение грузозахватного средства над расположенной на грузозахватном средстве и определенной путем измерения грузовой массой. При определении положения грузозахватного средства может учитываться угол ориентации стрелы между башней крана, соответственно, мачтой крана и горизонталью или наклоном всего подъемного устройства при монтаже на судне.
Деформация системы крановой стрелы может иметься, например, в виде некоторого - в частности, в положении использования подъемного устройства бокового и/или вертикального - прогиба, скручивания, закручивания или их комбинации, причем такая деформация в общем также касается мачты крана и транспортного средства, на котором расположено подъемное устройство. Как правило, возникает комбинация различных видов деформации. Система крановой стрелы может в общем, например, включать в себя мачту крана, телескопическую систему выдвижной стрелы и расположенную между телескопической системой выдвижной стрелы и мачтой крана главную стрелу, при этом система крановой стрелы может включать в себя, например, также систему сочленения, при этом расположенная на основании крана главная стрела этой системы сочленения может идентифицироваться как мачта крана. Но в общем мачта крана представляет собой соединение между основанием крана и главной стрелой (первую крановую стрелу) системы крановой стрелы (выполненную, например, в виде телескопической системы или системы сочлененной стрелы). Все конструктивные компоненты системы крановой стрелы могут, как правило, подвергаться значительным деформациям.
Наклон деформированной системы крановой стрелы, в свою очередь, находится во взаимосвязи с обусловленной этим наклоном деформацией, при этом, например, известный наклон транспортного средства недостаточен для точного определения положения точки системы крановой стрелы, так как транспортное средство даже при опорных элементах, имеющих конечную жесткость и варьирующиеся опорные точки по продольной протяженности транспортного средства, может деформироваться с различной силой и в зависимости от положения, из-за чего в уровне техники нет никакой исчерпывающей ссылки на действительно имеющийся наклон системы крановой стрелы относительно горизонтали (в смысле мировой системе координат с абсолютными координатами всего подъемного устройства), соответственно, считающегося плоским грунта.
Наклон транспортного средства неоднозначен и, применительно к продольной протяженности, вследствие воздействий различных сил и/или деформаций не постоянен по продольной протяженности. Также мачта крана как соединительное звено между системой крановой стрелы и основанием крана в общем подвержена значительным деформациям. Однако точное знание наклона как эталона обязательно, чтобы деформацию можно было с высокой мерой правильности моделировать по аккуратно определенному наклону, чтобы таким образом можно было определять положение точки системы крановой стрелы. Также недостатком уровня техники является, что грузовая масса - которая тоже вызывает определенную деформацию при известной геометрии, включая наклон подъемного устройства - должна определяться путем измерения, чтобы можно было делать заключение о деформации системы крановой стрелы, при этом грузовая масса, в противоположность массе подъемного устройства, может быть варьируемой во время применения подъемного устройства.
Поэтому объективно техническая задача настоящего изобретения заключается в том, чтобы предложить улучшенный по сравнению с уровнем техники способ управления и/или регулирования связанного с транспортным средством подъемного устройства, а также устройство управления и/или регулирования, у которых по меньшей мере частично устранены недостатки уровня техники, и которые отличаются, в частности, точным нахождением положения по меньшей мере одной точки системы крановой стрелы.
Эта задача решается признаками п.1 формулы изобретения.
Соответственно этому в соответствии с изобретением предусмотрено, что при определении положения указанной по меньшей мере одной точки определяется и учитывается косое положение подъемного устройства вследствие наклона основания крана относительно какого-либо заданного или задаваемого направления в пространстве.
Благодаря этому впервые становится возможным, чтобы основание крана служило, соответственно, использовалось в качестве того по существу жесткого конструктивного компонента подъемного устройства, на котором посредством мачты крана расположена система крановой стрелы и который может соединяться с транспортным средством, для определения эталонной плоскости для наклона системы крановой стрелы с высокой мерой точности, при этом транспортное средство, а также сама система крановой стрелы не представляют собой достаточной эталонной плоскости для определения деформации системы крановой стрелы. При известном наклоне основания крана относительно направления в пространстве - в частности, горизонтали применительно к считающемуся плоским грунту или мировой системе координат (в смысле координат в предопределенном или определяемом эталонном направлении) - может особенно удобно моделироваться деформация системы крановой стрелы с учетом наклона системы крановой стрелы, обусловленного наклоном основания крана.
В общем мачта крана может быть шарнирно или жестко соединена с основанием крана и/или основание крана может находиться в непосредственном соединении с рамой указанного транспортного средства. Данные, касающиеся наклона основания крана и деформации системы крановой стрелы, регистрируются и учитываются для определения указанной точки.
Термин «подъемное устройство» включает в себя, например, самоходные краны, краны для инспектирования мостов, самосвалы с платформой, перемещающейся по роликам, краны с подъемной рабочей площадкой и прочее, при этом термины «система крановой стрелы», «основание крана» и другие термины конструктивных компонентов, имеющие указание на «кран», должны толковаться так широко, чтобы они включали в себя также такие конструктивные компоненты, например, связанные с подъемными площадками. Особенно предпочтительны системы сочленения или телескопические системы, которые могут также встречаться в комбинации.
Обусловлена ли ориентация системы крановой стрелы наискосок относительно грунта или горизонтали наклоном основания крана или грузовой массой, соответственно, имеющейся геометрией системы крановой стрелы, для текущей деформации системы крановой стрелы несущественно. При знании наклона основания крана могут особенно удобно по модели деформации учитываться деформация при движениях системы крановой стрелы и дифференцироваться причины.
Наклон основания крана может находиться, например, посредством сенсора наклона, при этом вследствие жесткости основания крана наклон - по меньшей мере в состоянии останова системы крановой стрелы и при неизменной расположенной на системе крановой стрелы грузовой массе - по существу постоянен и однозначен относительно горизонтали. Наклон зависим, в том числе, от имеющихся длин хода выдвижных стрел, а также расположенной на системе крановой стрелы грузовой массы, при этом как длины хода, так и грузовая масса влияют на деформацию крановой стрелы и по связанному с ними изменению наклона, в свою очередь, генерируется обратная связь с деформацией системы крановой стрелы. Другими факторами, связанными с имеющимся наклоном основания крана, могут быть, например, геометрия подъемного устройства (такая как имеющийся угол системы крановой стрелы), состояние опирания подъемного устройства на грунт, прочность грунта, жесткости опорных элементов и прочее, при этом также углы выдвижных стрел системы крановой стрелы в пространстве зависимы от наклона основания крана, а также деформации системы крановой стрелы, и создают обратную связь применительно к деформации системы крановой стрелы и наклона основания крана.
Положение указанной по меньшей мере одной точки важно для разных требований к подъемному устройству, таких как правильность пути, избегание столкновений, мощность и/или точность функций комфорта (в частности, по мере возрастания степени автоматизации), имеющимся в текущий момент стойкостям к избыточной нагрузке или имеющейся в текущий момент устойчивости, при этом на базе деформационных моделей системы крановой стрелы в общем не может делаться достаточное заключение об угле отдельных выдвижных стрел без учета наклона основания крана как решающего эталона. Соответственно этому в соответствии с изобретением может находиться с высокой точностью вершина крана в абсолютных координатах (мировая система координат). Так как деформация системы крановой стрелы находится во взаимосвязи с углом отдельных выдвижных стрел, который зависим от наклона основания крана, может точно определяться абсолютная локализация отдельных конструктивных компонентов системы крановой стрелы.
Особенно предпочтительно при этом используется деформационная модель для системы крановой стрелы и/или подъемного устройства (при необходимости, с расположенным транспортным средством), которая моделирует выдвижные стрелы, главную стрелу, находящуюся в привязке к телескопической системе выдвижной стрелы систему стрелы и/или мачту крана (аналогичное рассмотрение относится к предусмотренной в дополнение или альтернативно системе сочленения) по некоторому алгоритму, при этом отдельные конструктивные компоненты - в частности, выдвижные стрелы, главная стрела и/или мачта крана системы крановой стрелы, предпочтительно система сочленения, - моделируются жестко, упруго и/или посредством балочной модели для определения положения указанной по меньшей мере одной точки. Специальный термин «упругий» означает в этом контексте, что, например, выдвижная стрела при нагрузке может гибко деформироваться с учетом жесткости. В общем система крановой стрелы может быть выполнена, например, в виде телескопической системы выдвижной стрелы или в виде системы (шарнирного) сочленения.
К этому добавляется то положительное свойство, что функциональные возможности связанного с транспортным средством подъемного устройства для пользователя могут предоставляться улучшенным образом, соответственно, более комфортным образом и/или более гибким образом. Это касается, например, функций, зависимых от геометрии, таких как выпрямленное положение, положение крана в пространстве и/или соблюдение запретных областей (например, ограничений высоты, заграждений соседнего пути или определяемых, в частности, оператором подъемного устройства защитных зон, таких как фасады зданий), функций, зависимых от загруженности, таких как избыточная нагрузка, устойчивость и/или взвешивание, а также полуавтоматических функций, соответственно, функций комфорта, таких как координатное управление, запоминание положений указанной по меньшей мере одной точки, планирование пути и/или защита от столкновений. Например, могут находиться рассчитанные крановым управлением применительно к защите от столкновений подъемного устройства поправочные сигналы или осуществляться перерегулирование установок оператора подъемного устройства.
Крановое управление в этом контексте должно рассматриваться как предназначенное для подъемного устройства устройство управления и/или регулирования, причем это устройство управления и/или регулирования может представлять собой, например, часть кранового управления (например, в смысле определяющего модуля), которая предусмотрена для выполнения способа управления и/или регулирования. Привязка кранового управления к подъемному устройству и/или устройству управления и/или регулирования может иметься в общем посредством проводного соединения и/или посредством радиосигнала.
Особый интерес может представлять собой также абсолютный угол выдвижной стрелы - в частности, самой наружной (применительно к расстоянию от мачты крана) выдвижной стрелы - в пространстве, чтобы, например, монтировать механическую и/или гидравлическую систему сочленения. В уровне техники для этого обычно угол выдвижной стрелы измеряется прямо в шарнире крановой стрелы или в непосредственной близости от нее, так как здесь по существу не возникает деформация. Однако, поэтому угол выдвижной стрелы, в частности при деформации, заметно отличается от абсолютного угла в пространстве, при этом также поправочный угол, если считать, что система крановой стрелы является жесткой, не приводит к правильному абсолютному углу системы сочленения, так как измерение угла при этом осуществляется относительно самой наружной выдвижной стрелы. Поэтому особенно предпочтительно определение угла, в частности самой наружной выдвижной стрелы, с учетом деформационной модели, а также наклона основания крана. Определение угла может осуществляться исключительно путем расчетов деформационной модели и/или применения данных сенсоров, таких как, например, сенсорика угла.
В одной модели для определения деформации специфические конструктивные компоненты, такие как мачта крана и/или главная стрела, несмотря на действительную деформацию, могут считаться жесткими, при этом в расчете деформационной модели, в зависимости от требований к точности расчета, вполне могут учитываться также деформации этих конструктивных компонентов.
Как уже указывалось в начале, защита испрашивается также для устройства управления и/или регулирования для связанного с транспортным средством подъемного устройства, включающего в себя систему шарнирно-сочлененной крановой стрелы, имеющую вершину крана, причем в это устройство управления и/или регулирования может вводиться по меньшей мере один сенсорный сигнал по меньшей мере одного расположенного на подъемном устройстве сенсора, при этом устройство управления и/или регулирования в по меньшей мере одном рабочем режиме конфигурировано для того, чтобы с учетом указанного по меньшей мере одного сенсорного сигнала находить получающуюся под воздействием динамических и/или статических сил деформацию системы крановой стрелы и с учетом этой деформации определять положение по меньшей мере одной точки системы крановой стрелы, в частности вершины крана, при этом устройство управления и/или регулирования соединено или может соединяться передачей сигнала с сенсором наклона, при этом устройство управления и/или регулирования в указанном по меньшей мере одном рабочем режиме конфигурировано для того, чтобы с учетом сигналов этого сенсора наклона определять косое положение подъемного устройства вследствие наклона основания крана, на котором расположено подъемное устройство, относительно заданного или задаваемого направления в пространстве и учитывать при определении положения указанной по меньшей мере одной точки.
Например, сенсор наклона для регистрации наклона основания крана может располагаться на жестком (стационарном) конструктивном элементе, таком как основание крана, чтобы по деформационной модели (в том числе на базе данных указанного по меньшей мере одного сенсора) делать заключение о текущем угле между выдвижными стрелами, выдвижной стрелой и мачтой крана и/или мачтой крана и основанием крана, при этом, в частности, рассчитываются поправочные значения для углов.
Можно также выполнять измерение наклона опосредованно, при этом сенсор наклона расположен, например, на наружной выдвижной стреле и с помощью деформационной модели по измеренному наклону выдвижной стрелы (относительно основания крана, мачты крана и/или другой выдвижной стрелы) делается заключение о наклоне основания крана.
Количество сенсоров и сенсоров наклона является в общем любым, при этом с помощью множества сенсоров и/или сенсоров наклона может повышаться точность измерения наклона основания крана. Особенно предпочтительно количество сенсоров и/или сенсоров наклона равно количеству телескопических выдвижных стрел связанного с транспортным средством подъемного устройства, уменьшенному на 1, и не меньше, чем 1.
Косое положение системы крановой стрелы может быть обусловлено намеренным косым положением по геометрии системы крановой стрелы, наклоном основания крана и деформацией системы крановой стрелы, при этом все три аспекта могут учитываться в определении положения указанной по меньшей мере одной точки и, в частности, в модели для определения деформации системы крановой стрелы.
Как уже указывалось, защита испрашивается также для связанного с транспортным средством подъемного устройства, имеющего по меньшей мере одно такое устройство управления и/или регулирования, систему шарнирно-сочлененной крановой стрелы, имеющую вершину крана, основание крана, по меньшей мере один расположенный на подъемном устройстве сенсор и сенсор наклона.
Как уже указывалось в начале, защита испрашивается также для компьютерного программного продукта, включающего в себя команды, которые при выполнении таким устройством управления и/или регулирования заставляют его выполнять этапы такого способа.
Предпочтительные варианты осуществления изобретения определены в зависимых пунктах формулы изобретения.
По одному из предпочтительных вариантов осуществления изобретения предусмотрено, что система крановой стрелы включает в себя по меньшей мере одну телескопическую систему выдвижной стрелы, имеющую по меньшей мере две выдвижные стрелы, при этом текущая длина хода по меньшей мере одной из указанных по меньшей мере двух выдвижных стрел определяется и учитывается при определении положения указанной по меньшей мере одной точки, предпочтительно посредством сенсорики длины хода, при этом текущая длина хода учитывается в модели для определения деформации системы крановой стрелы.
В общем выдвижные стрелы могут быть выполнены шарнирно-сочлененными (посредством системы сочленения) и/или с возможностью поступательного движения, при этом путем изменения длины хода изменяется геометрия системы крановой стрелы, вследствие чего может изменяться деформация системы крановой стрелы и наклон основания крана. Также, при необходимости, расположенная на системе крановой стрелы грузовая масса и/или изменение угла выдвижной стрелы и/или системы сочленения, в частности при различных длинах хода, обусловливает варьирующиеся моменты.
Предпочтительным образом предусмотрено, что указанные по меньшей мере две выдвижные стрелы имеют отличающиеся друг от друга жесткости, причем эти жесткости рассчитываются и/или учитываются для определения положения указанной по меньшей мере одной точки. Но различные жесткости в общем не являются обязательно необходимыми - например, более тонкое и большего размера поперечное сечение выдвижной стрелы может иметь такую же жесткость, что и более толстое и меньшего размера поперечное сечение выдвижной стрелы, при этом в деформационной модели могут быть объединены, например, множество выдвижных стрел в зависимости от жесткости, соответствующей этому множеству выдвижных стрел (например, всей телескопической системы выдвижной стрелы).
Путем учета различных жесткостей и их влияний на деформацию системы крановой стрелы (например, телескопической системы выдвижной стрелы и/или системы сочленения) может особенно точно осуществляться нахождение положения указанной по меньшей мере одной точки. Жесткости зависят в общем от специфических для материала и геометрических параметров.
Оказалось удобным, чтобы жесткости, влияние этих жесткостей на деформацию системы крановой стрелы и/или деформация системы крановой стрелы находились по наклону основания крана и/или косому положению подъемного устройства и/или длине хода указанных по меньшей мере двух выдвижных стрел.
Эти различные жесткости могут представлять собой исходный параметр нахождения положения указанной по меньшей мере одной точки на основе модели деформации системы крановой стрелы - например, когда жесткости выдвижных стрел точно не известны. Если, например, деформация системы крановой стрелы и наклон основания крана (при необходимости, найденный сенсорами) известен, можно делать заключение об имеющихся жесткостях, в частности при имеющемся износе системы крановой стрелы после данной продолжительности эксплуатации подъемного устройства. Особенно предпочтительно жесткости, предпочтительно различные жесткости, системы крановой стрелы представляют собой входной параметр деформационной модели для нахождения положения указанной по меньшей мере одной точки.
В общем параметры применительно к геометрии подъемного устройства могут представлять собой влияющие величины для модели расчета деформации или, при противоположном рассмотрении, исходную величину из деформационной модели. Как правило, жесткости или их влияния на деформацию системы крановой стрелы образуют параметры для расчета деформации системы крановой стрелы; в общем на основе деформационной модели с учетом длин хода и/или наклона основания крана и/или косого положения подъемного устройства могут также делаться заключения о жесткостях или их влиянии на деформацию системы крановой стрелы.
По одному из предпочтительных вариантов осуществления изобретения предусмотрено, что система крановой стрелы включает в себя по меньшей мере две телескопические выдвижные стрелы, при этом указанные по меньшей мере две выдвижные стрелы имеют следящее управление, при этом имеющаяся в текущий момент длина хода указанной по меньшей мере одной выдвижной стрелы учитывается при определении положения указанной по меньшей мере одной точки.
Следящее управление может использоваться, чтобы можно было особенно удобно создавать однозначную взаимосвязь между длинами хода выдвижных стрел и жесткостями отдельных выдвижных стрел при данной форме профиля и/или площади поперечного сечения, при этом отдельные выдвижные стрелы системы крановой стрелы могут быть снабжены различными жесткостями. Аналогичное рассуждение относится к расчету центра тяжести и собственного момента. Следящее управление, при наличии знания о позиционировании отдельных выдвижных стрел, может служить для приложения применяемой деформационной модели, при этом, например, может особенно точно определяться, находится ли положение указанной по меньшей мере одной точки системы крановой стрелы вследствие наклона системы крановой стрелы в пространстве (обусловленного наклоном основания крана и действующими на систему крановой стрелы силами) выше или ниже горизонтали. Особенно предпочтительно следящее управление используется, когда отдельные выдвижные стрелы имеют различные жесткости.
Альтернативно по одному из предпочтительных вариантов осуществления изобретения может быть предусмотрено, чтобы система крановой стрелы включала в себя по меньшей мере две телескопические выдвижные стрелы и частичное следящее управление (следящее управление, которое касается только отдельных выдвижных стрел системы крановой стрелы) или была выполнена без следящего управления (при этом следящее управление не предусмотрено), при этом
- предусмотрена дополнительная сенсорика для нахождения длин хода указанных по меньшей мере двух выдвижных стрел и/или
- жесткости не имеющих следящего управления выдвижных стрел объединяются в одну общую жесткость, при этом предпочтительно учитывается смещение центра тяжести подъемного устройства, и/или
- расчет деформации системы крановой стрелы по модели для определения деформации системы крановой стрелы выполняется при первой жесткости и при второй, отличающейся от первой жесткости.
В частности, если по причинам, связанным с площадью и/или стоимостью, возможно только частичное следящее управление или следящее управление совсем невозможно, при этом можно опосредованно делать заключения о длинах хода и/или взаимосвязи с жесткостями для определения положения указанной по меньшей мере одной точки, при этом выбор и количество не имеющих следящего управления выдвижных стрел в общем является любым. Когда выполняются расчеты при различных, предпочтительно заданных или задаваемых, жесткостях, в зависимости от области приложения и/или требований к подъемному устройству может использоваться тот расчет, который обусловливает в качестве результата расчета более неблагоприятный случай (worst case-Szenario), чтобы можно было, например, с помощью наиболее удаленной вследствие расчета точки на системе крановой стрелы находить надежную стойкость к избыточной нагрузке и/или ограничение высоты или можно было учитывать вероятные пределы ошибок в расчете положения указанной по меньшей мере одной точки. Первая жесткость и вторая жесткость могут в общем приниматься на основе геометрии выдвижных стрел, предпочтительно индивидуально для отдельных выдвижных стрел. Также возможно использование более благоприятного случая и расчетов при множестве жесткостей.
Частичное следящее управление особенно предпочтительно предусмотрено при по меньшей мере трех телескопических выдвижных стрелах, при этом, например, по меньшей мере две из указанных телескопических выдвижных стрел снабжены (частичным) следящим управлением. Частичное следящее управление подразумевает в этом контексте, что не все имеющиеся выдвижные стрелы системы крановой стрелы выдвигаются, соответственно, вдвигаются друг за другом, а только часть от общего числа выдвижных стрел, при этом для тех выдвижных стрел, которые не имеют следящего управления, последовательность выдвижных стрел может осуществляться произвольно (индивидуально и/или определяемым образом).
По одному из предпочтительных вариантов осуществления изобретения предусмотрено, что подъемное устройство включает в себя по меньшей мере один жесткий участок подъемного устройства, предпочтительно основание крана, транспортное средство для подъемного устройства и/или мачту крана, и по меньшей мере один деформируемый участок подъемного устройства, предпочтительно по меньшей мере одну при необходимости имеющуюся выдвижную стрелу системы крановой стрелы, при этом наклон подъемного устройства на указанном по меньшей мере одном жестком участке подъемного устройства определяется и/или учитывается в модели для определения деформации системы крановой стрелы.
Модель для определения деформации системы крановой стрелы и в дальнейшем для определения положения указанной по меньшей мере одной точки может согласовываться в зависимости от требований к точности и/или виду подъемного устройства. В общем может быть также предусмотрена модель для определения деформации всего связанного с транспортным средством подъемного устройства, предпочтительно вместе с расположенным у подъемного устройства транспортным средством. Выбор жестких и деформируемых участков подъемного устройства является, в общем любым, при этом также все конструктивные компоненты подъемного устройства могут считаться деформируемыми. Формы подъемного устройства, имеющие телескопическую мачту крана или сочлененную стрелу вместо главной стрелы тоже возможны и могут гибко учитываться в деформационной модели. Предпочтительно мачта крана является соединительным звеном между основанием крана и главной стрелой (например, первой телескопической выдвижной стрелой или первой сочлененной стрелой в привязке к мачте крана).
Предпочтительным оказалось, чтобы, предпочтительно посредством по меньшей мере одного сенсора наклона и/или по меньшей мере одной сенсорики угла, находился
- наклон основания крана относительно грунта, и/или
- по меньшей мере один угол между одним жестким участком подъемного устройства и другим жестким участком подъемного устройства, и/или
- по меньшей мере один угол между жестким участком подъемного устройства и деформируемым участком подъемного устройства, и/или
- по меньшей мере один угол между одним деформируемым участком подъемного устройства и другим деформируемым участком подъемного устройства,
при этом наклон основания крана, косое положение подъемного устройства и/или указанный по меньшей мере один угол учитывается в модели для определения деформации системы крановой стрелы, при этом рассчитывается положение указанной по меньшей мере одной точки.
Особенно предпочтительно дополнительно к определению указанной по меньшей мере одной точки на системе крановой стрелы определяется также угол по меньшей мере одной выдвижной стрелы в пространстве, причем этот угол указанной по меньшей мере одной выдвижной стрелы предпочтительно находится по другому углу между жестким участком подъемного устройства и жестким участком подъемного устройства с помощью сенсорики угла, причем этот другой угол учитывается в деформационной модели с учетом наклона основания крана.
Жесткий участок подъемного устройства в этом контексте определяет не стационарный конструктивный компонент, а конструктивный компонент, который, хотя и может двигаться, например шарнирно, относительно другого конструктивного компонента подъемного устройства, однако в деформационной модели считается имеющим повышенную жесткость и/или по существу не гибким.
Путем определения по меньшей мере одного угла можно делать заключения о геометрии – при необходимости, с учетом длин хода выдвижных стрел, - которая имеет влияние на наклон основания крана и деформацию системы крановой стрелы. Модель деформации системы крановой стрелы, чтобы моделировать деформацию системы крановой стрелы, может включать в себя в качестве входных параметров, например, наклон основания крана и определенный сенсорикой угла угол.
Например, может измеряться наклон основания крана и угол относительно мачты крана, при этом углы выдвижных стрел рассчитываются с помощью модели определения деформации с учетом наклона и/или угла относительно мачты крана. Однако угол может также измеряться на выдвижной стреле или на множестве элементов конструкции системы крановой стрелы.
Возможно также, чтобы жесткости выдвижных стрел и/или мачты крана определялись по информации о наклоне основания крана и найденному углу.
В частности, все деформации подъемного устройства и углы отдельных выдвижных стрел системы крановой стрелы - друг относительно друга и/или абсолютно в пространстве - находятся с учетом наклона основания крана.
Один из предпочтительных вариантов настоящего изобретения заключается в том, что рассчитывается множество точек системы крановой стрелы, причем по этому множеству точек находится геометрия системы крановой стрелы, предпочтительно подъемного устройства.
Когда известно некоторое множество точек системы крановой стрелы, то, например, избегание столкновений вершины крана может распространяться на другие конструктивные компоненты подъемного устройства. Однако избегание столкновений в общем не ограничено вершиной крана и может быть отнесено, в том числе, к транспортному средству и/или конструктивным компонентам системы крановой стрелы - например, имеющим сенсорику для распознавания окружения.
Особенно предпочтительно, чтобы расположенная на подъемном устройстве грузовая масса рассчитывалась с учетом деформации системы крановой стрелы и наклона основания крана, при этом предпочтительно предусмотрено, что эта грузовая масса рассчитывается до, во время и/или после определения положения указанной по меньшей мере одной точки, особенно предпочтительно посредством имеющейся, при необходимости, сенсорики угла и/или сенсорики давления.
Благодаря этому грузовая масса не должна находиться посредством сенсора, при этом, например, рассчитывается грузовая масса и деформационная модель адаптируется по рассчитанной грузовой массе, в частности с учетом имеющегося угла, длин хода и/или жесткостей выдвижных стрел. Грузовая масса может рассчитываться, например, на основе измененной геометрии крановой стрелы, деформации системы крановой стрелы и/или измененного наклона основания крана относительно горизонтали. Грузовая масса может быть определена, например, расположенным на крановом крюке переносимым грузом.
В качестве примера, грузовая масса может определяться следующим образом:
- сенсоры в виде угловой сенсорики (сенсорика угла) находят угол между выдвижными стрелами, мачтой крана и основанием крана, при этом длины хода выдвижных стрел находятся по углам при данной общей длине хода или, при необходимости, посредством сенсорики длины хода;
- загруженность подъемного устройства находится и/или рассчитывается с помощью сенсора измерения давления в определяющих нагрузку цилиндрах выдвижных стрел;
- по этой загруженности рассчитывается деформация системы крановой стрелы и
- по деформации, а также загруженности рассчитывается грузовая масса.
Аналогичным образом грузовая масса может также находиться у подъемного устройства, которое в дополнение и/или альтернативно вместо выдвижных стрел имеет систему сочленения, при этом углы соответственно этому определяются относительно стрел (таких как главная стрела и/или другие шарнирно соединенные стрелы) системы сочленения.
Положение указанной по меньшей мере одной точки может находиться с учетом наклона указанного по меньшей мере одного основания крана и деформации системы крановой стрелы.
В общем возможно также, чтобы для определения положения указанной по меньшей мере одной точки использовались по меньшей мере две деформационные модели или действительно имеющаяся деформация сравнивалась с деформацией из деформационной модели. При необходимости, деформация из деформационной модели может согласовываться (адаптироваться) с помощью действительно имеющейся деформации. Деформационная модель может быть аппроксимирована, например, по балочной модели.
В одном из предпочтительных примеров осуществления изобретения предусмотрено, что грузовая масса, предпочтительно рассчитанная грузовая масса, учитывается в модели для определения деформации системы крановой стрелы.
Наклон основания крана, а также деформация системы крановой стрелы зависимы, в том числе, от расположенной на системе крановой стрелы грузовой массы, вследствие чего, с одной стороны, грузовая масса может находиться из наклонов основания крана и деформаций системы крановой стрелы, а с другой стороны, грузовая масса может учитываться в расчете в деформационной модели системы крановой стрелы (при учете наклона), благодаря чему может обеспечиваться особенно предпочтительное определение положения указанной по меньшей мере одной точки.
С одной стороны, в итеративном процессе сначала по деформационной модели может определяться грузовая масса, а после этого грузовая масса использоваться для расчетов по деформационной модели; с другой стороны, благодаря обратной связи грузовой массы с деформацией на деформационную модель может оказываться влияние или она может адаптироваться таким образом, чтобы деформационная модель обеспечивала заключения особенно высокой точности о действительно имеющейся деформации системы крановой стрелы. Грузовая масса в общем может использоваться также в целях калибровки модели для определения деформации системы крановой стрелы.
По одному из предпочтительных примеров осуществления изобретения предусмотрено, что модель для определения деформации системы крановой стрелы калибруется по задаваемому или заданному износу системы крановой стрелы и/или по меньшей мере одному задаваемому или заданному параметру.
Указанный по меньшей мере один задаваемый или заданный параметр может представлять собой, например, имеющуюся в текущий момент длину хода выдвижной стрелы, скорость движения, форму профиля и/или площадь поперечного сечения, при этом также можно устанавливать в качестве параметров для калибровки или в качестве предельного значения максимальной деформации системы крановой стрелы желаемую стойкость к избыточной нагрузке и/или устойчивость. Особенно предпочтительно этот параметр представляет собой грузовую массу, при этом он особенно удобно может служить для правильной калибровки в пределах коротких промежутков времени. Износ представляет собой, как правило, долговременный эффект, при этом предпочтительно износ может использоваться для повышения точности в определении положения указанной по меньшей мере одной точки, когда, например, при пониженной мощности подъемного устройства и/или деформационной модели осуществляется (дополнительная) калибровка с учетом износа. Предпочтительно осуществляется первая калибровка, чтобы, например, компенсировать влияние допусков (конструктивных элементов, изготовления и прочее), которые особенно предпочтительно учитываются в модели для определения деформации системы крановой стрелы.
По одному из предпочтительных вариантов осуществления изобретения предусмотрено, что вручную задается по меньшей мере один управляющий сигнал для подъемного устройства и рассчитывается по меньшей мере одна регулирующая величина для по меньшей мере одного актуатора (исполнительный элемент) с учетом положения указанной по меньшей мере одной точки и/или прогнозируемого положения по меньшей мере одной точки.
При знании наклона основания крана и положения указанной по меньшей мере одной точки возможна экстраполяция в отношении движений системы крановой стрелы, благодаря чему, в частности, может повышаться правильность пути. Прогнозируемое положение может находиться по той же самой деформационной модели, причем подлежащая изменению в будущем геометрия крана служит параметром для расчета. При знании текущего положения и прогнозируемого положения могут улучшаться полуавтоматические функции, такие как координатное управление (в частности, при двух системах сочленения на подъемном устройстве), при этом также можно успешно влиять на актуаторное управление или процесс работы оператора.
В этой связи может также осуществляться возможность объезда сохраненной в памяти кривой пути системы крановой стрелы, в частности при различных загруженностях или, соответственно, варьирующихся грузовых массах.
Полуавтоматические функции в виде функций комфорта могут касаться, например, позиционирования системы крановой стрелы в пространстве (при необходимости, с учетом правильности пути и/или избегания столкновений), при этом, например, задано желаемое место выгрузки, и подъемному устройству посредством кранового управления подъемного устройства передаются необходимые положения для расчета, чтобы можно было ставить грузовую массу на это место выгрузки.
Если система крановой стрелы включает в себя систему сочленения и еще одну систему сочленения, особенно предпочтительно определять угол между этими двумя системами сочленения (абсолютно в пространстве относительно эталонной плоскости) с учетом наклона основания крана и деформации системы крановой стрелы (сравн. фиг.5).
Также предпочтительно предусмотрено, что находится и/или рассчитывается деформация и/или наклон транспортного средства, на котором расположено подъемное устройство, относительно грунта, и учитывается при определении положения указанной по меньшей мере одной точки.
Наклон транспортного средства и/или мачты крана в соответствии с изобретением определяться в общем не должен, однако может дополнительно снижать ошибочность положения указанной по меньшей мере одной точки. Наклон основания крана включает в себя в общем наклон транспортного средства, при этом наклон транспортного средства вследствие закручиваний может также принимать различные значения в зависимости от положения.
В другом варианте осуществления может быть предусмотрено, чтобы положение указанной по меньшей мере одной точки вместе со связанным с ним наклоном основания крана и/или связанной с ним деформацией системы крановой стрелы, предпочтительно вместе с имеющимися, при необходимости, длинами хода выдвижных стрел и/или углами между выдвижными стрелами и основанием крана, сохранялись в банке данных.
Благодаря сохранению в банке данных пользователь может получать возможность удобным образом вновь настраивать уже осуществлявшееся положение указанной по меньшей мере одной точки, при этом движение подъемного устройства, при необходимости, корректируется измененной грузовой массой (при воздействии на наклон и деформацию) или измененной геометрией системы крановой стрелы.
По одному из предпочтительных вариантов осуществления изобретения предусмотрено, что путем определения положения указанной по меньшей мере одной точки составляется план траектории положения указанной по меньшей мере одной точки и/или подъемного устройства с учетом наклона основания крана и деформации системы крановой стрелы по запланированной траектории.
По одному из предпочтительных вариантов осуществления изобретения предусмотрено, что план траектории составляется на базе сохраненных в банке данных положений указанной по меньшей мере одной точки.
План траектории может в общем генерироваться как на базе модели деформации системы крановой стрелы – при необходимости, с учетом измененного наклона основания крана, - так и по уже определенным положениям указанной по меньшей мере одной точки, при этом, в частности, могут учитываться параметры, такие как геометрия системы крановой стрелы.
Особенно предпочтительно предусмотрено, что положение указанной по меньшей мере одной точки предоставляется по меньшей мере одной полуавтоматической функции кранового управления, при этом предпочтительно предусмотрено, что план траектории подъемного устройства находится с учетом положения указанной по меньшей мере одной точки и/или может корректироваться с помощью вводимых вручную установок.
Возможно также, чтобы вводимые вручную установки корректировались планом траектории и/или положением или прогнозируемым положением указанной по меньшей мере одной точки посредством кранового управления.
Особенно предпочтительно предусмотрено, что предусмотрена по меньшей мере одна регистрирующая сенсорика, предпочтительно камера, для регистрации объектов и/или препятствий в зоне досягаемости подъемного устройства, причем эти объекты и/или препятствия учитываются в плане траектории. Альтернативно или в дополнение в качестве по меньшей мере одной регистрирующей сенсорики может применяться радар, лидар, ладар, лазер, ультразвуковой сенсор или тому подобное.
С помощью указанной по меньшей мере одной регистрирующей сенсорики план пути может рассчитываться с учетом маршрутов уклонения и/или подлежащих избеганию объектов или препятствий, то есть избегания столкновений. Например, камера регистрирует объекты и составляет маршрут уклонения на базе положения указанной по меньшей мере одной точки и/или прогнозируемых положений указанной по меньшей мере одной точки. Можно также задействовать через внешний контроллер роботизированный кран при передаче текущего положения вершины крана.
По одному из предпочтительных вариантов осуществления изобретения предусмотрено, что положение центра тяжести системы крановой стрелы учитывается в определении положения указанной по меньшей мере одной точки в зависимости от наклона основания крана, деформации системы крановой стрелы, геометрии системы крановой стрелы и/или веса расположенного в по меньшей мере одной выдвижной стреле системы крановой стрелы гидравлического масла, при этом предпочтительно расположенная, при необходимости, на подъемном устройстве грузовая масса рассчитывается по наклону основания крана, деформации системы крановой стрелы, геометрии системы крановой стрелы и/или весу расположенного в указанной по меньшей мере одной выдвижной стреле системы крановой стрелы гидравлического масла.
Положение центра тяжести, в частности, зависимо от наклона основания крана, геометрии системы крановой стрелы, а также имеющихся длин хода выдвижных стрел. Кроме того, на положение центра тяжести влияет величина объема гидравлического масла (при данной температуре и/или плотности) и его локализация в выдвижных стрелах.
Например, в модели деформации, такой как прогиб, в частности телескопических выдвижных систем, может учитываться и/или рассчитываться изменение центра тяжести каждой выдвижной системы, благодаря чему может особенно успешно находиться имеющаяся в текущий момент грузовая масса без необходимости заранее определять грузовую массу - например, посредством предусмотренного для этого сенсора, - причем это нахождение может быть зависимо от текущего положения крана и/или геометрии крана, обусловленных изменением количества гидравлического масла в гидравлических цилиндрах, причем это количество гидравлического масла, в свою очередь, может быть зависимо от положения цилиндров и/или отношения площади поршня и штока.
Положение центра тяжести имеет влияние на собственные моменты связанного с транспортным средством подъемного устройства, которые посредством деформационной модели, в свою очередь, могут использоваться для конкретно имеющейся избыточной нагрузки и/или устойчивости крана. Например, загруженность может служить входной величиной для деформационной модели, при этом, в частности, посредством сенсоров давления измеряется давление в подъемном цилиндре и по геометрии крана определяется загруженность и предпочтительно сила цилиндра корректируется на определенное по модели трения трение в цилиндре. Определенная грузовая масса может учитываться в деформационной модели.
Предпочтительно учитывается количество гидравлического масла для по меньшей мере одной выдвижной стрелы и/или по меньшей мере одного цилиндра сочлененной стрелы первой системы сочленения системы крановой стрелы. При исполнении подъемного устройства с двумя системами сочленения учитывается количество гидравлического масла для по меньшей мере одной выдвижной стрелы и/или по меньшей мере одного цилиндра сочлененной стрелы. Благодаря этому в расчете в деформационной модели могут особенно предпочтительно учитываться собственные моменты при имеющейся геометрии подъемного устройства.
Оказалось особенно удобным, чтобы смещение положения центра тяжести вызывало изменение устойчивости и/или стойкости к избыточной нагрузке.
Устойчивость относится в этом контексте к тому максимальному моменту, при котором подъемное устройство не опрокидывается с учетом определенного запаса надежности. Стойкость к избыточной нагрузке относится в этом контексте к тому максимальному моменту, при котором еще не наступает пластическая деформация подъемного устройства с учетом определенного запаса надежности.
Смещение положения центра тяжести может идентифицироваться посредством сенсорики и/или рассчитываться из модели для определения деформации системы крановой стрелы, при этом могут точнее рассчитываться и/или лучше исчерпываться устойчивость и стойкость к избыточной нагрузке.
Положение центра тяжести может подвергаться влиянию как работы подъемного устройства, так и состояния его оснастки. Например, при работе канатной лебедки вес крана по существу всегда постоянен, при этом, однако, положение центра тяжести в общем изменяется от состояния оснастки - например, при различных состояниях каната, таких как количество канатных ветвей, степень разматывания канатного барабана, положение каната и прочее - в зависимости от распределения веса каната на подъемном устройстве.
Боковая деформация системы крановой стрелы и/или наклон отдельных выдвижных стрел учитываются особенно предпочтительно при нахождении положения указанной по меньшей мере одной точки и/или при определении наклона выдвижной стрелы.
Может быть предусмотрено, чтобы крановое управление итеративно посредством сенсорики геометрии находило положение крана по жесткой и не наклоненной модели, посредством сенсорики измерения наклона находило положение крана по жесткой и наклоненной модели и посредством сенсорики измерения давления в определяющих нагрузку подъемных цилиндрах находило положение крана при деформации и наклоне, при этом путем определения нагрузки и собственных моментов определяется грузовая масса, соответственно, переносимый груз. В общем крановое управление может также выполнять этапы процесса синхронно и/или, например, обходиться без нахождения грузовой массы.
Когда пользователь связанного с транспортным средством подъемного устройства задает управляющие сигналы, регулирующие величины могут рассчитываться крановым управлением и адаптироваться, например, к функциям, направленным на безопасность, и/или функциям комфорта, при этом может генерироваться набор регулирующих величин для надлежащих актуаторов.
По меньшей мере по двум положениям двух точек может также определяться угол выбранных конструктивных компонентов подъемного устройства.
Признаки пунктов формулы изобретения, относящихся к способу, могут переноситься на пункты формулы изобретения, относящиеся к устройству, и наоборот.
Другие подробности и преимущества настоящего изобретения поясняются подробнее далее с помощью описания фигур со ссылкой на изображенные на фигурах примеры осуществления. Показано:
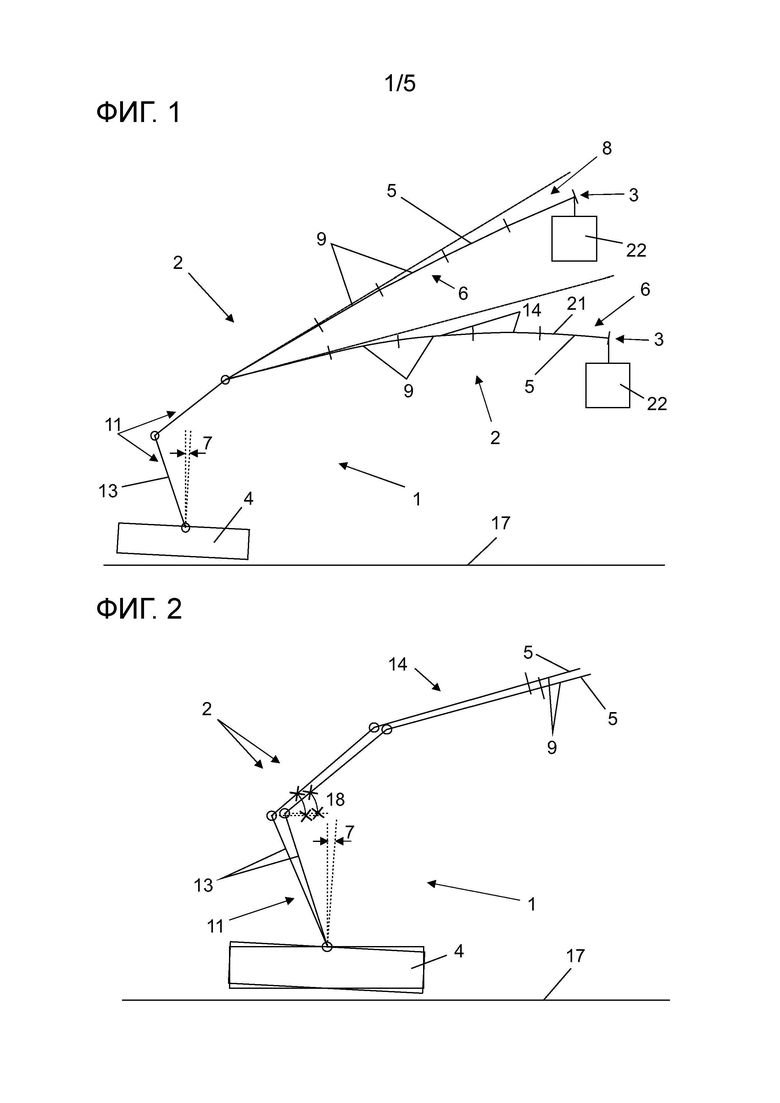
фиг.1: подъемное устройство при наклоненном основании крана и расположенной на системе крановой стрелы грузовой массе в двух различных геометриях системы крановой стрелы в схематичном изображении;
фиг.2: подъемное устройство при наклоненном и не наклоненном основании крана в схематичном изображении;
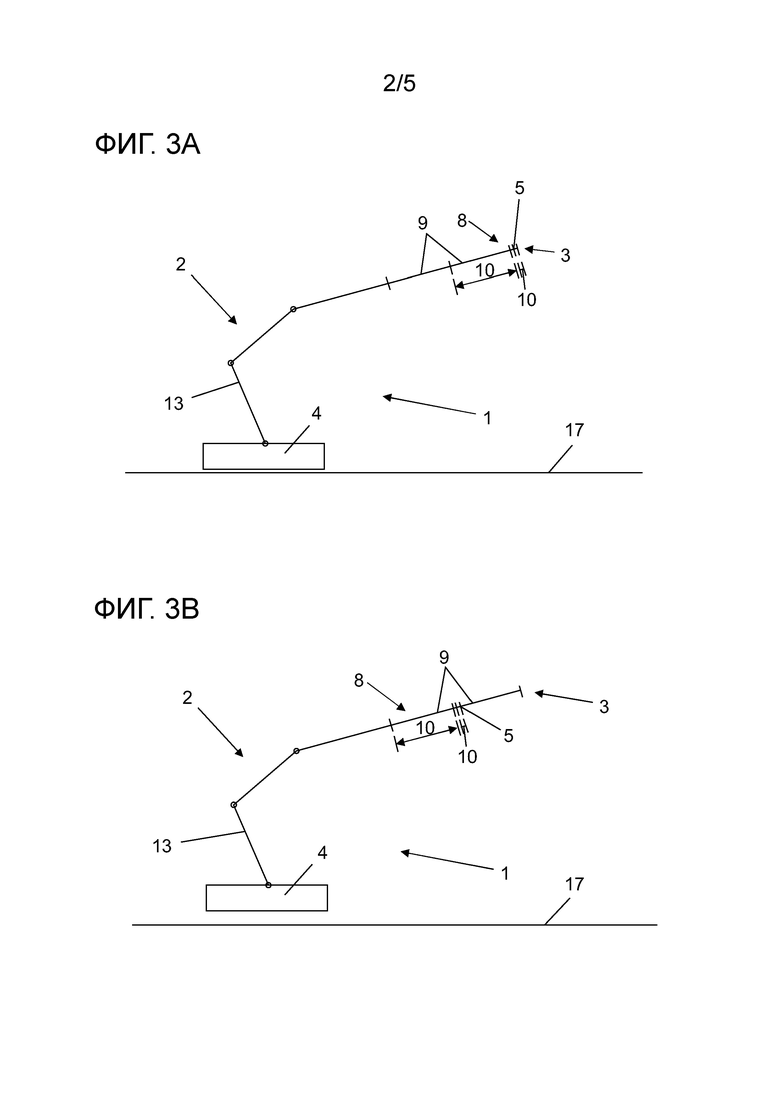
фиг.3a-3b: подъемное устройство, имеющее следящее управление, и подъемное устройство без следящего управления, в схематичном изображении;
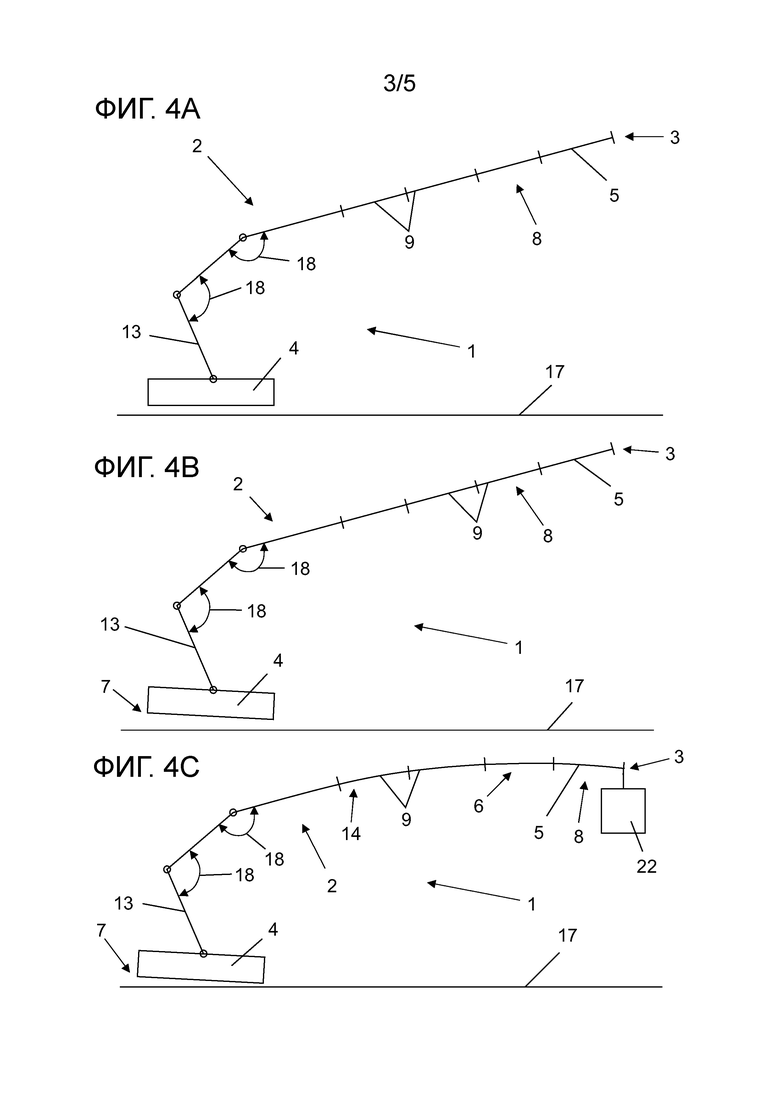
фиг. 4a-4c: подъемное устройство при не наклоненном основании крана и не деформированной системе крановой стрелы, при наклоненном основании крана и не деформированной системе крановой стрелы, а также при наклоненном основании крана и деформированной системе крановой стрелы, в схематичном изображении;
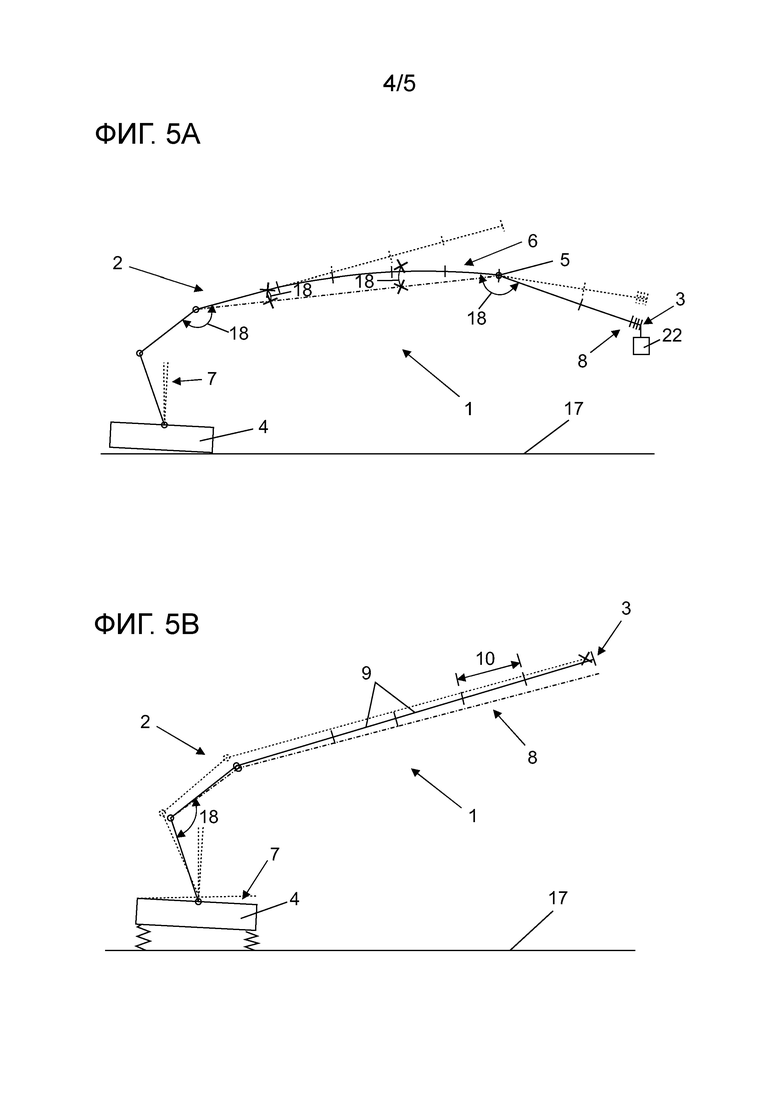
фиг.5a-5b: подъемное устройство, имеющее две системы сочленения, при этом угол между этими двумя системами сочленения был найден с учетом деформации системы крановой стрелы и наклона основания крана, а также наклоненное и не деформированное подъемное устройство, у которого углы корректировались для компенсации наклона основания крана, в схематичном изображении;
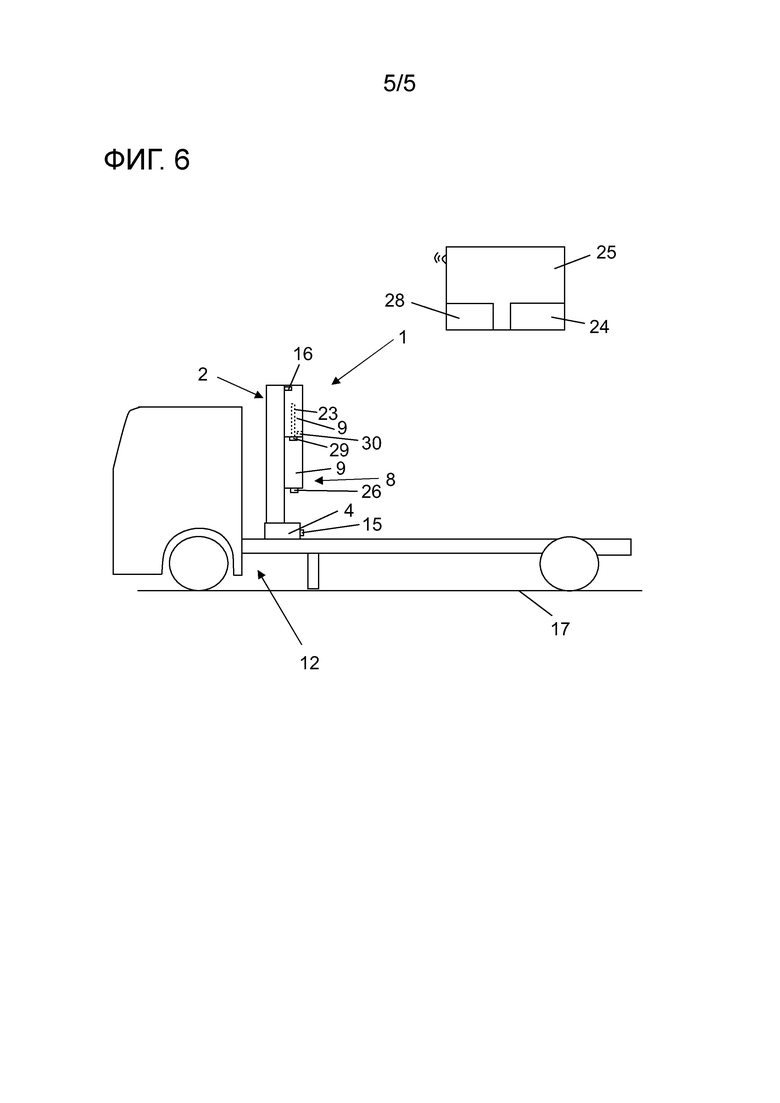
фиг.6: связанное с транспортным средством подъемное устройство, имеющее систему крановой стрелы и крановое управление, в схематичном изображении.
На фиг.1 показано связанное с транспортным средством подъемное устройство 1, при этом транспортное в целях обзорности на этом изображении не показано (сравн. фиг.6). Подъемное устройство 1 включает в себя систему 2 шарнирно-сочлененной крановой стрелы, имеющую вершину 3 крана и основание 4 крана, причем это подъемное устройство 1 выполнено для того, чтобы подвергаться управлению с учетом найденного положения множества точек 5 (в следующих рассуждениях применяется единственное число) системы 2 крановой стрелы и в особенности вершины крана 3, при этом получающаяся под воздействием динамических и статических сил деформация 6 системы 2 крановой стрелы учитывается при определении положения точки 5. Множество точек 5 системы 2 крановой стрелы рассчитывается по деформационной модели, при этом по множеству точек 5 находится геометрия подъемного устройства 1.
Подъемное устройство 1 изображено в двух положениях, при этом вследствие собственных моментов и грузовой массы 22, в зависимости от геометрии системы 2 крановой стрелы, обусловлены различные деформации 6. Грузовая масса 22 может рассчитываться из деформаций 6 и не должна находиться отдельно посредством сенсорики. Штриховыми линиями указаны надлежащие не деформированные геометрии системы 2 крановой стрелы.
Косое положение подъемного устройства 1 определяется и учитывается вследствие наклона 7 основания 4 крана относительно заданного направления в пространстве при определении положения точки 5. Заданное направление в пространстве представляет собой базовое направление, которое может определяться в абсолютных координатах (свободно определяемые мировые координаты) и представлять собой базу для геометрии системы 2 крановой стрелы относительно горизонтали.
Расположенная на системе 2 крановой стрелы подъемного устройства 1 грузовая масса 22 рассчитывается с учетом деформации 6 системы 2 крановой стрелы и наклона 7 основания 4 крана, причем эта грузовая масса 22 может рассчитываться до, во время и после определения положения точки 5. В поддержку может использоваться сенсорика 16 угла или сенсорика 30 давления (сравн. фиг.6).
Рассчитанная грузовая масса 22 учитывается в модели для определения деформации 6 системы 2 крановой стрелы.
На фиг.2 показано подъемное устройство 1, имеющее жесткий участок 11 подъемного устройства в виде мачты 13 крана, а также основания 4 крана, и деформируемый участок 14 подъемного устройства в виде выдвижных стрел 9. Примыкающая к телескопическим выдвижным стрелам 9 сочлененная стрела системы сочленения представляет собой считающийся жестким участок 11 подъемного устройства. В общем выбор жестких элементов конструкции для модели определения деформации системы 2 крановой стрелы является любым, а не обязательно требуемым, при этом особенно предпочтительно все участки подъемного устройства 1 считаются деформируемыми. Особенно предпочтительно сенсор 15 наклона располагается на основании крана или на некотором участке меньшей деформируемости по сравнению с выдвижными стрелами 9, однако в общем возможно также опосредованное определение наклона 7 основания 4 крана по деформационной модели.
При этом «жесткие» означает, что они также в деформационной модели могут считаться или считаются жесткими. Балочная модель, у которой, например, также более жесткая относительно выдвижных стрел 9 мачта 13 крана считается деформируемой, особенно предпочтительна, при этом наклон 7 подъемного устройства 1 все же может определяться на мачте 13 крана (или основании 14 крана), даже если они тоже могут подвергаться значительным деформациям. Прямое измерение наклона 7 на основании крана оказалось особенно удобным.
Изображено подъемное устройство 1 при наклоненном и не наклоненном основании 4 крана, при этом угол 18 между примыкающей к мачте 13 крана стрелой системы сочленения идентичен; однако геометрия подъемного устройства 1 вследствие наклона 7 выражена различно. Наклон 7 может компенсироваться поправочным углом с учетом сопутствующей деформации системы 2 крановой стрелы, чтобы автоматически направлять точку 5, такую как вершина 3 крана, в желаемое место.
На фиг.3a показана система 2 крановой стрелы, имеющая следящее управление, при этом выдвижные стрелы 9 имеют различные жесткости, причем эти жесткости, влияние жесткостей на деформацию 6 системы 2 крановой стрелы и деформация 6 системы крановой стрелы находятся и учитываются, в том числе, для определения положения указанной по меньшей мере одной точки 5. Влияние жесткостей на деформацию 6 включается после этого в деформационную модель, при этом жесткости в общем также могут быть уже известны. Имеющиеся в текущий момент длины 10 хода телескопических выдвижных стрел 9 системы 2 крановой стрелы учитываются при определении положения точки 5.
Жесткости, а также их влияние на деформацию 6 выдвижных стрел 9 системы крановой стрелы могут рассчитываться при наклоненном подъемном устройстве 1, при необходимости, по наклону 7 основания 4 крана, косому положению подъемного устройства 1 или длине 10 хода выдвижных стрел 9.
На фиг.3b показана система 2 крановой стрелы, включающая в себя систему сочленения, имеющую систему 8 телескопической выдвижной стрелы и множество телескопических выдвижных стрел 9, при этом текущая длина 10 хода по меньшей мере одной из выдвижных стрел 9 определяется и учитывается при определении положения точки 5 посредством сенсорики длины хода (на этом изображении не видна). Текущая длина 10 хода учитывается в модели для определения деформации 6 системы 2 крановой стрелы. Однако изображенное подъемное устройство 1, в отличие от фиг.3a, не включает в себя следящего управления.
На фиг.4a показано состояние подъемного устройства 1 в не наклоненном и не деформированном положении.
На фиг.4b показано подъемное устройство 1, имеющее косое положение вследствие наклона 7 основания 4 крана, при этом подъемное устройство 1 не деформировано.
На фиг.4c показано наклоненное и деформированное подъемное устройство 1, при этом модель для определения деформации 6 системы 2 крановой стрелы (и всего подъемного устройства 1) может калиброваться задаваемым износом системы 2 крановой стрелы и задаваемым параметром, чтобы повысить точность определения положения точки 5. Крановое управление 25 может, например, при имеющемся износе адаптировать геометрию системы 2 крановой стрелы соответственно установкам или отклонять установки оператора вследствие недостаточных параметров безопасности.
Деформация 6 в общем зависима как от грузовой массы 22, так и наклона 7 и собственных моментов при имеющейся геометрии подъемного устройства 1.
Могут задаваться вручную управляющий сигнал для подъемного устройства 1 и рассчитываться регулирующие величины для связанных с системой 2 крановой стрелы актуаторов 23 (см. фиг.6) с учетом положения точки 5 и прогнозируемого положения точки 5.
Путем определения положения точки 5 может составляться план траектории положения точки 5 или самого подъемного устройства 1 с учетом наклона 7 основания 4 крана и деформации 6 системы 2 крановой стрелы по запланированной траектории, то есть план пути, при этом план траектории может составляться или рассчитываться вновь на базе сохраненного в банке 24 данных (сравн. крановое управление 25 на фиг.6) положения точки 5.
На фиг.5a показано подъемное устройство 1, при этом посредством сенсора 15 наклона и сенсорики 16 угла (сравн. фиг.6) находится наклон 7 основания 4 крана относительно плоского грунта 17 в качестве базы и угол 18 между двумя системами сочленения, а также угол 18 между первой выдвижной стрелой 9 (ближайшей к мачте 13 крана выдвижной стрелой 9) первой системы сочленения и примыкающей к первой выдвижной стреле 9 (в направлении мачты 13 крана) сочлененной стрелой. Штриховыми линиями указаны геометрии систем сочленения, которые не учитывают, в частности обусловленную наклоном 7, деформацию 6.
Углы 18 рассчитываются относительно штрихпунктирной линии, причем они учитывают деформацию 6 по отдельным выдвижным стрелам 9, чтобы можно было правильно определять наклон второй системы сочленения в абсолютных координатах в пространстве, причем этот наклон мог бы находиться не только по угловому положению (относительные координаты) между двумя системами сочленения (или, при необходимости, с помощью поправочных углов).
В общем могут также находиться или рассчитываться углы 18 между другими жесткими участками 11 подъемного устройства и/или жесткими и/или деформируемыми участками 11, 14 подъемного устройства.
Наклон 7 основания 4 крана, косое положение подъемного устройства 1 и зарегистрированные или рассчитанные углы 18 учитываются в модели для определения деформации системы 2 крановой стрелы, при этом рассчитывается положение точки 5.
В принципе, также вторая система сочленения подвергается деформации 6, однако вторая система сочленения как часть системы 2 крановой стрелы считалась в деформационной модели жесткой и, таким образом, не деформированной. Однако в общем также деформация 6 второй системы сочленения может включаться в модель для расчета деформации 6 всей системы 2 крановой стрелы. В общем в системе 2 крановой стрелы подъемного устройства 1 могут быть объединены несколько систем сочленения и/или телескопических систем, при этом подъемное устройство 1 может также включать в себя несколько систем 2 крановой стрелы. Обе системы сочленения могут считаться одной общей системой 2 крановой стрелы или. Положение подлежащей нахождению точки 5 (здесь как положение привязки второй системы сочленения) в общем является любым и может, например, также представлять собой вершину 3 крана второй системы сочленения. Множество точек 5 особенно предпочтительно, чтобы можно было с высокой точностью моделировать геометрию подъемного устройства 1.
На фиг.5b показано наклоненное подъемное устройство 1, при этом штриховой линией указана геометрия крана при отсутствующем наклоне 7 основания 4 крана. Штрихпунктиром показана геометрия крана при имеющемся наклоне 7 основания 4 крана, причем на этом изображении углы 18 системы сочленения системы 2 крановой стрелы были согласованы таким образом, что вершина 3 крана приближается к не наклоненному состоянию при тех же самых длинах 10 хода выдвижных стрел 9. Из длин 10 хода отдельных выдвижных стрел 9 может рассчитываться общая длина хода системы крановой стрелы.
В общем при этом также должны учитываться различные деформации 6 подъемного устройства 1, так как в этом наклоненном состоянии основания 4 крана возникает повышенная деформация 6. Длины 10 хода выдвижных стрел 9 дают дополнительную, подлежащую согласованию степень свободы, при этом также варьирующиеся жесткости вызывают различные деформации 6. Необходимые поправочные углы для системы сочленения могут рассчитываться из модели для расчета деформации системы 2 крановой стрелы - предпочтительно путем сложения векторов, - так что также с учетом расположенной, при необходимости, грузовой массы 22 компенсируется боковой сдвиг и сдвиг по высоте (а также вылет), при этом, в частности, могут учитываться критерии безопасности.
Например, наклон 7 может компенсироваться устройством 28 управления и/или регулирования следующим образом: выбирается система координат в качестве базы, причем эта база в ходе компенсации наклона в общем изменяется и соответственно этому во время расчета должна была бы адаптироваться. С помощью линейной алгебры может делаться заключение о первом поправочном угле стрелы системы 2 крановой стрелы, при этом вследствие краевого условия, что положение точки 5 наклоненной геометрии должно быть идентично положению надлежащей точки 5 исходной геометрии системы 2 крановой стрелы, в деформационной модели может делаться заключение о втором поправочном угле стрелы, который, например, учитывает измененное положение центра тяжести, измененное распределение гидравлического масла, измененные собственные моменты, измененное положение грузовой массы и прочее в матрице преобразования.
Положение центра тяжести системы 2 крановой стрелы учитывается в определении положения точки 5 в зависимости от наклона 7 основания 4 крана, деформации системы 2 крановой стрелы, геометрии системы 2 крановой стрелы и веса расположенного в выдвижных стрелах 9 системы 2 крановой стрелы гидравлического масла. Расположенная на подъемном устройстве 1 грузовая масса 22 рассчитывается по наклону 7 основания 4 крана, деформации 6 системы 2 крановой стрелы, геометрии системы 2 крановой стрелы и весу расположенного в выдвижных стрелах 9 системы 2 крановой стрелы гидравлического масла, при этом вес гидравлического масла, а также грузовая масса 22 включается в модель для расчета деформации системы 2 крановой стрелы и в дальнейшем для определения положения точки 5. Смещение положения центра тяжести может вызывать изменение устойчивости или стойкости к избыточной нагрузке и соответственно этому должно включаться в алгоритм расчета, соответственно, модель для определения деформации подъемного устройства 1.
На фиг.6 показано связанное с транспортным средством подъемное устройство 1, которое расположено на транспортном средстве 12, имеющем опорное устройство. Положение этого опорного устройства является в общем любым, при этом наклон основания 4 крана применительно к наклону транспортного средства 12, например, при неровном грунте или различных прочностях грунта, может получаться различным. Сенсорика 16 угла локализована предпочтительно во вращающемся шарнире подъемного устройства 1.
Подъемное устройство 1 выполнено с крановым управлением 25, находящимся посредством передачи сигнала в соединении с передачей данных с системой 2 крановой стрелы, причем это крановое управление 25 также может быть частью подъемного устройства или находиться в кабельном соединении с системой 2 крановой стрелы. Подъемное устройство 1 включает в себя устройство 28 управления и/или регулирования, систему 2 шарнирно-сочлененной крановой стрелы, имеющую вершину 3 крана, основание 4 крана, расположенный на подъемном устройстве 1 сенсор 29 и тоже расположенный на подъемном устройстве 1 сенсор 15 наклона.
В устройство 28 управления и/или регулирования для подъемного устройства 1 могут вводиться сенсорные сигналы расположенного на подъемном устройстве 1 сенсора 29, при этом устройство 28 управления и/или регулирования в по меньшей мере одном рабочем режиме конфигурировано для того, чтобы с учетом сенсорных сигналов находить получающуюся при воздействии динамических и статических сил деформацию 6 системы 2 крановой стрелы и с учетом этой деформации 6 определять положение точек 5 системы 2 крановой стрелы, таких как вершина 3 крана. Устройство 28 управления и/или регулирования соединено передачей сигнала с сенсором 15 наклона, при этом устройство 28 управления и/или регулирования в указанном по меньшей мере одном рабочем режиме конфигурировано для того, чтобы с учетом сигналов сенсора 15 наклона определять косое положение подъемного устройства 1 вследствие наклона 7 основания 4 крана, на котором расположено подъемное устройство 1, относительно заданного или задаваемого направления в пространстве и учитывать при определении положений точек 5.
Крановое управление 25 включает в себя память данных, которая выполнена в виде банка 24 данных, и устройство 28 управления и/или регулирования в качестве определяющего модуля кранового управления 25 для выполнения способа, причем в этой памяти данных сохранен алгоритм в виде компьютерной программы, и при выполнении этой компьютерной программы устройством 28 управления и/или регулирования выполняются команды, которые заставляют устройство 28 управления и/или регулирования управлять подъемным устройством 1 с учетом положений точек 5.
Положение точки 5 вместе со связанным с ним наклоном 7 основания 4 крана и другой информацией, такой как, например, связанные с положением точки 5 длины 10 хода выдвижных стрел 9 и углы 18 между выдвижными стрелами 9 или выдвижными стрелами 9 и основанием 4 крана, могут сохраняться в банке 24 данных.
Положение точки 5 может предоставляться полуавтоматической функции кранового управления 25, при этом план траектории подъемного устройства 1 находится с учетом положения точки 5 и может корректироваться с помощью вводимых вручную установок оператора подъемного устройства 1.
Подъемное устройство 1 включает в себя регистрирующую сенсорику 26 в виде камеры для регистрации объектов и препятствий в зоне досягаемости подъемного устройства 1, причем эти объекты и препятствия учитываются в плане траектории посредством устройства 28 управления и/или регулирования кранового управления 25. Иные регистрирующие сенсорики 26, такие как лидар, радар или тому подобные, тоже возможны.
Деформация 6 и наклон 7 транспортного средства 12, на котором расположено подъемное устройство 1, относительно грунта 17 может находиться или рассчитываться посредством сенсорики транспортного средства, причем эти дополнительные данные могут учитываться при определении положения точки 5.
Если система 2 крановой стрелы имеет частичное следящее управление или не имеет следящего управления, посредством дополнительной сенсорики могут находиться длины 10 хода выдвижных стрел 9 и/или жесткости не имеющих следящего управления выдвижных стрел 9 могут объединяться в расчете в одну общую жесткость с учетом изменений центра тяжести. Также можно выполнять расчеты деформации 6 системы 2 крановой стрелы по деформационной модели при первой жесткости выдвижных стрел 9 и при отличающейся от нее второй жесткости выдвижных стрел, при этом, в частности, используется тот расчет, который генерирует более неблагоприятное положение точки 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАГРУЗКИ, БЛОК УПРАВЛЕНИЯ ДЛЯ ГИДРАВЛИЧЕСКОГО ПОДЪЕМНОГО УСТРОЙСТВА ДЛЯ ОСУЩЕСТВЛЕНИЯ ТАКОГО СПОСОБА | 2017 |
|
RU2714833C1 |
| Кран | 2018 |
|
RU2683918C1 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2019 |
|
RU2737758C1 |
| КРАНОВЫЙ КОНТРОЛЛЕР | 2015 |
|
RU2641395C1 |
| КРАН С КРАНОВЫМ КОНТРОЛЛЕРОМ | 2020 |
|
RU2772140C1 |
| СПОСОБ КОНТРОЛЯ БЕЗОПАСНОСТИ КРАНА, А ТАКЖЕ СИСТЕМА ДЛЯ КОНТРОЛЯ БЕЗОПАСНОСТИ КРАНА | 2015 |
|
RU2696650C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И ГРУЗОВОЙ КРАН С УСТРОЙСТВОМ УПРАВЛЕНИЯ | 2018 |
|
RU2737639C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОДНЯТИЯ ГРУЗА | 2018 |
|
RU2768693C2 |
| КРАН | 2017 |
|
RU2734966C2 |
| КРАН С УСТРОЙСТВОМ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ, А ТАКЖЕ СПОСОБ ЭКСПЛУАТАЦИИ НЕСКОЛЬКИХ ТАКИХ КРАНОВ | 2019 |
|
RU2780593C2 |
Изобретение относится к грузоподъемным устройствам. Управление и/или регулирование связанного с транспортным средством подъемного устройства (1) включает систему (2) шарнирно-сочлененной крановой стрелы, имеющую вершину (3) крана и основание (4) крана. С учетом найденного положения по меньшей мере одной точки (5) системы (2) крановой стрелы, в частности вершины (3) крана, при определении положения указанной по меньшей мере одной точки (5) учитывается деформация (6) системы (2) крановой стрелы, получающаяся под воздействием динамических и/или статических сил. При определении положения по меньшей мере одной точки (5) определяется и учитывается косое положение подъемного устройства (1) вследствие наклона (7) основания (4) крана относительно заданного или задаваемого направления в пространстве. Достигается улучшение управления и/или регулирования связанного с транспортным средством подъемного устройства. 4 н. и 21 з.п. ф-лы, 6 ил.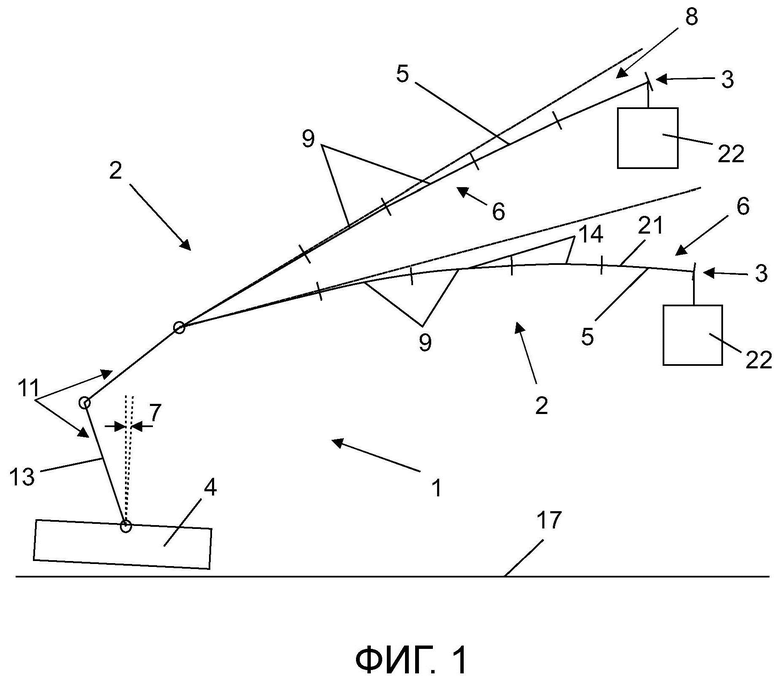
1. Способ управления и/или регулирования связанного с транспортным средством подъемного устройства (1), включающего в себя систему (2) шарнирно-сочлененной крановой стрелы, имеющую вершину (3) крана и основание (4) крана, с учетом найденного положения по меньшей мере одной точки (5) этой системы (2) крановой стрелы, в частности вершины (3) крана, причем при определении положения указанной по меньшей мере одной точки (5) учитывают деформацию (6) системы (2) крановой стрелы, получаемую под воздействием динамических и/или статических сил, отличающийся тем, что при определении положения указанной по меньшей мере одной точки (5) определяют и учитывают косое положение подъемного устройства (1) вследствие наклона (7) основания (4) крана относительно заданного или задаваемого направления в пространстве.
2. Способ по п. 1, при этом система (2) крановой стрелы включает в себя по меньшей мере одну телескопическую систему (8) выдвижной стрелы, имеющую по меньшей мере две выдвижные стрелы (9), при этом текущую длину (10) хода по меньшей мере одной из указанных по меньшей мере двух выдвижных стрел (9) определяют и учитывают при определении положения указанной по меньшей мере одной точки (5), предпочтительно посредством сенсорики длины хода, причем текущую длину (10) хода учитывают в модели для определения деформации (6) системы (2) крановой стрелы.
3. Способ по п. 2, при этом указанные по меньшей мере две выдвижные стрелы (9) имеют отличающиеся друг от друга жесткости, причем эти жесткости рассчитывают и/или учитывают для определения положения указанной по меньшей мере одной точки (5).
4. Способ по п. 3, при этом жесткости, влияние этих жесткостей на деформацию (6) системы (2) крановой стрелы и/или деформацию (6) системы (2) крановой стрелы находят по наклону (7) основания (4) крана и/или косому положению подъемного устройства (1) и/или длине (10) хода указанных по меньшей мере двух выдвижных стрел (9).
5. Способ по одному из предыдущих пунктов, при этом система (2) крановой стрелы включает в себя по меньшей мере две телескопические выдвижные стрелы (9), причем указанные по меньшей мере две выдвижные стрелы (9) имеют следящее управление, причем имеющуюся в текущий момент длину (10) хода указанной по меньшей мере одной выдвижной стрелы (9) учитывают при определении положения указанной по меньшей мере одной точки (5).
6. Способ по одному из пп. 1-4, при этом система (2) крановой стрелы включает в себя по меньшей мере две телескопические выдвижные стрелы (9) и частичное следящее управление или выполнена без следящего управления, причем
предусмотрена дополнительная сенсорика для нахождения длин (10) хода указанных по меньшей мере двух выдвижных стрел (9) и/или
жесткости не имеющих следящего управления выдвижных стрел (9) объединяют в одну общую жесткость, причем предпочтительно учитывают смещение центра тяжести подъемного устройства (1), и/или
расчет деформации (6) системы (2) крановой стрелы по модели для определения деформации (6) системы (2) крановой стрелы выполняют при первой жесткости указанных по меньшей мере двух выдвижных стрел (9) и при второй, отличающейся от первой жесткости указанных по меньшей мере двух выдвижных стрел (9).
7. Способ по одному из предыдущих пунктов, при этом подъемное устройство (1) включает в себя по меньшей мере один жесткий участок (11) подъемного устройства, предпочтительно основание (4) крана, транспортное средство (12) для подъемного устройства (1) и/или мачту (13) крана, и по меньшей мере один деформируемый участок (14) подъемного устройства, предпочтительно по меньшей мере одну имеющуюся, при необходимости, выдвижную стрелу (9) системы (2) крановой стрелы, причем наклон (7) подъемного устройства (1) определяют на указанном по меньшей мере одном жестком участке (11) подъемного устройства и/или учитывают в модели для определения деформации (6) системы (2) крановой стрелы.
8. Способ по п. 7, при этом предпочтительно посредством по меньшей мере одного сенсора (15) наклона и/или по меньшей мере одной сенсорики (16) угла, находят
наклон (7) основания (4) крана относительно грунта (17), и/или
по меньшей мере один угол (18) между жестким участком (11) подъемного устройства и по меньшей мере одним другим жестким участком (11) подъемного устройства, и/или
по меньшей мере один угол (18) между жестким участком (11) подъемного устройства и деформируемым участком (14) подъемного устройства, и/или
по меньшей мере один угол (18) между деформируемым участком (14) подъемного устройства и другим деформируемым участком (14) подъемного устройства,
при этом наклон (7) основания (4) крана, косое положение подъемного устройства (1) и/или указанный по меньшей мере один угол (18) учитывают в модели для определения деформации системы (2) крановой стрелы, причем положение указанной по меньшей мере одной точки (5) рассчитывают.
9. Способ по одному из предыдущих пунктов, при этом рассчитывают множество точек (5) системы (2) крановой стрелы, причем по этому множеству точек (5) находят геометрию системы (2) крановой стрелы, предпочтительно подъемного устройства (1).
10. Способ по одному из предыдущих пунктов, при этом расположенную на подъемном устройстве (1) грузовую массу (22) рассчитывают с учетом деформации (6) системы (2) крановой стрелы и наклона (7) основания (4) крана, при этом предпочтительно предусмотрено, что эту грузовую массу (22) рассчитывают до, во время и/или после определения положения указанной по меньшей мере одной точки (5), особенно предпочтительно посредством имеющейся, при необходимости, сенсорики (16) угла и/или сенсорики (30) давления.
11. Способ по одному из предыдущих пунктов, при этом грузовую массу (22), предпочтительно рассчитанную по п.10 грузовую массу (22), учитывают в модели для определения деформации (6) системы (2) крановой стрелы.
12. Способ по одному из предыдущих пунктов, при этом модель для определения деформации (6) системы (2) крановой стрелы калибруют по задаваемому или заданному износу системы (2) крановой стрелы и/или по меньшей мере одному задаваемому или заданному параметру.
13. Способ по одному из предыдущих пунктов, при этом вручную задают по меньшей мере один управляющий сигнал для подъемного устройства (1) и рассчитывают по меньшей мере одну регулирующую величину для по меньшей мере одного актуатора (23) с учетом положения указанной по меньшей мере одной точки (5) и/или прогнозируемого положения по меньшей мере одной точки (5).
14. Способ по одному из предыдущих пунктов, при этом находят и/или рассчитывают деформацию (6) и/или наклон (7) транспортного средства (12), на котором расположено подъемное устройство (1), относительно грунта (17), и учитывают при определении положения указанной по меньшей мере одной точки (5).
15. Способ по одному из предыдущих пунктов, при этом положение указанной по меньшей мере одной точки (5) вместе со связанным с ним наклоном (7) основания (4) крана и/или связанной с ним деформацией (6) системы (2) крановой стрелы, предпочтительно вместе с имеющимися, при необходимости, длинами (10) хода выдвижных стрел (9) и/или углами (18) между выдвижными стрелами (9) и основанием (4) крана, сохраняют в банке (24) данных.
16. Способ по одному из предыдущих пунктов, при этом путем определения положения указанной по меньшей мере одной точки (5) составляют план траектории положения указанной по меньшей мере одной точки (5) и/или подъемного устройства (1) с учетом наклона (7) основания (4) крана и деформации (6) системы (2) крановой стрелы по запланированной траектории.
17. Способ по п. 15 или 16, при этом план траектории составляют на базе сохраненных в банке (24) данных положений указанной по меньшей мере одной точки (5).
18. Способ по одному из предыдущих пунктов, при этом положение указанной по меньшей мере одной точки (5) предоставляют по меньшей мере одной полуавтоматической функции кранового управления (25), при этом предпочтительно предусмотрено, что план траектории подъемного устройства (1) находят с учетом положения указанной по меньшей мере одной точки (5) и/или он является корректируемым с помощью вводимых вручную установок.
19. Способ по одному из пп. 16-18, при этом предусмотрена по меньшей мере одна регистрирующая сенсорика (26), предпочтительно камера, для регистрации объектов и/или препятствий в зоне досягаемости подъемного устройства (1), причем эти объекты и/или препятствия учитывают в плане траектории.
20. Способ по одному из предыдущих пунктов, при этом положение центра тяжести системы (2) крановой стрелы учитывают в определении положения указанной по меньшей мере одной точки (5) в зависимости от наклона (7) основания (4) крана, деформации системы (2) крановой стрелы, геометрии системы (2) крановой стрелы и/или расположенного в по меньшей мере одной выдвижной стреле (9) системы (2) крановой стрелы веса гидравлического масла, при этом предпочтительно расположенную, при необходимости, на подъемном устройстве (1) грузовую массу (22) рассчитывают по наклону (7) основания (4) крана, деформации (6) системы (2) крановой стрелы, геометрии системы (2) крановой стрелы и/или расположенному в указанной по меньшей мере одной выдвижной стреле (9) системы (2) крановой стрелы весу гидравлического масла.
21. Способ по п. 20, при этом смещение положения центра тяжести вызывает изменение устойчивости и/или стойкости к избыточной нагрузке.
22. Устройство (28) управления и/или регулирования для связанного с транспортным устройством подъемного устройства (1), включающего в себя систему (2) шарнирно-сочлененной крановой стрелы, имеющую вершину (3) крана, причем это устройство (28) управления и/или регулирования выполнено с возможностью ввода в него по меньшей мере одного сенсорного сигнала по меньшей мере одного расположенного на подъемном устройстве (1) сенсора (29), причем устройство (28) управления и/или регулирования в по меньшей мере одном рабочем режиме конфигурировано для того, чтобы с учетом указанного по меньшей мере одного сенсорного сигнала находить получающуюся под воздействием динамических и/или статических сил деформацию (6) системы (2) крановой стрелы и с учетом этой деформации (6) определять положение по меньшей мере одной точки (5) системы (2) крановой стрелы, в частности вершины (3) крана, отличающееся тем, что это устройство (28) управления и/или регулирования соединено или выполнено с возможностью соединения передачей сигнала с сенсором (15) наклона, причем устройство (28) управления и/или регулирования в указанном по меньшей мере одном рабочем режиме конфигурировано для того, чтобы с учетом сигналов этого сенсора (15) наклона определять косое положение подъемного устройства (1) вследствие наклона (7) основания (4) крана, на котором расположено подъемное устройство (1), относительно заданного или задаваемого направления в пространстве и учитывать при определении положения указанной по меньшей мере одной точки (5).
23. Устройство (28) управления и/или регулирования по п. 22, причем это устройство (28) управления и/или регулирования выполнено для того, чтобы выполнять способ по одному из пп. 1-21.
24. Связанное с транспортным средством подъемное устройство (1), имеющее по меньшей мере одно устройство (28) управления и/или регулирования по п. 22 или 23, систему (2) шарнирно-сочлененной крановой стрелы, имеющую вершину (3) крана, основание (4) крана, по меньшей мере один расположенный на подъемном устройстве (1) сенсор (29) и сенсор (15) наклона.
25. Компьютерный программный продукт, включающий в себя команды, которые при выполнении устройством (28) управления и/или регулирования по п. 22 или 23 заставляют его выполнять этапы по меньшей мере одного способа по одному из пп. 1-21.
| КРУТОНАКЛОННАЯ КОНВЕЙЕРНАЯ УСТАНОВКА ДЛЯ ОТКРЫТОЙ ГОРНОЙ ВЫРАБОТКИ | 2013 |
|
RU2636634C2 |
| DE 19983149 B3, 04.12.2014 | |||
| EP 3313771 A1, 02.05.2018 | |||
| CN 105631144 A, 01.06.2016 | |||
| Стрела грузоподъемной машины | 2018 |
|
RU2684254C1 |

