Изобретение относится к области электротехники и силовой промышленной электроники, а именно, к управляемым двухдвигательным электроприводам на базе индукторных двигателей (имеющим статор, на котором расположены несколько фазных обмоток, образующих полюса электромагнитной системы двигателя и зубчатый безобмоточный ротор) большой мощности, работающих в широком диапазоне регулирования скорости и момента с высокими значениями КПД. Изобретение может быть использовано в различных отраслях (горное дело, энергетика, жилищно-коммунальное хозяйство, судостроение и т.п.). Преимущественная область применения - шахтные вентиляционные установки местного проветривания для обеспечения горных выработок необходимым количеством воздуха.
Известно устройство (А.с. СССР №1082965 от 30.03.1984 на изобретение УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ШАХТНЫМИ ВЕНТИЛЯТОРАМИ МЕСТНОГО ПРОВЕТРИВАНИЯ, МПК5 E21F 1/00, Заявитель: Ворошиловоградский филиал ГПКНИИ по автоматизации угольной промышленности «Гипроуглеавтоматизация»), состоящее из датчика скорости воздуха 1, линии связи 2, исполнительного блока 3, включающего приемник сигналов 4, время-задающий блок 5, стабилизированный источник питания 6, переключающий блок 9, блок автоматического повторного включения вентиляторов 7, узла автоматического запуска рабочего и резервного вентиляторов 8 и дополнительного узла 10.
Основным недостатком данного устройства является возможность запуска в работу только одного вентилятора (рабочего или резервного), причем, без возможности регулирования их скорости вращения.
Известен электропривод (А.с. СССР №1677799 от 15.09.1991 на изобретение ЭЛЕКТРОПРИВОД СООСНЫХ МЕХАНИЗМОВ ВСТРЕЧНОГО ВРАЩЕНИЯ, МПК5 Н02K 16/00, В64С 11/46, Заявитель: «Новосибирский электротехнический институт»), содержащий два ротора, отделенных друг от друга воздушным зазором и расположенных на коаксиально расположенных валах с возможностью вращения валов относительно друга в противоположных направлениях, отличающийся тем, что, с целью повышения производительности соосных механизмов путем выравнивания частот вращения валов, он снабжен двумя синхронными машинами с роторами, установленными на разных валах, и статорами с якорными обмотками, соединенными с встречным порядком чередования фаз.
Недостатками данного электропривода является достаточно сложная конструкция, причем, подключение обмотки одного из роторов к питающей сети выполняется с помощью контактных колец, а выравнивание частот вращения валов для повышения производительности соосных механизмов (например, гребных винтов или крыльчаток вентилятора) обеспечивается двумя дополнительными синхронными машинами.
Известен осевой многоступенчатый вентилятор (А.с. СССР №1749550 от 23.07.1992 на изобретение ОСЕВОЙ МНОГОСТУПЕНЧАТЫЙ ВЕНТИЛЯТОР, МПК5 F04D 25/06, Заявитель: Производственное объединение «Уралмаш»), содержащий корпус, размещенные в нем рабочие колеса встречного вращения с лопаточными венцами, установленные на двух соосных валах, и электропривод, отличающийся тем, что рабочие колеса одного направления вращения выполнены в виде цилиндрической обечайки, на внутренней поверхности которой закреплены лопаточные венцы ступицы и вала, жестко связанного со ступицей, другой вал размещен внутри обечайки, рабочие колеса другого направления вращения установлены на валу и размещены между лопаточными венцами, закрепленными внутри цилиндрической обечайки, электропривод выполнен в виде двух электродвигателей, установленных на корпусе с противоположных сторон, один из которых через кулачковую муфту связан с валом цилиндрической обечайки, а другой через кулачковую муфту - с валом, расположенным внутри обечайки.
Основными недостатками данного вентилятора являются:
- относительная сложность конструкции;
- отсутствие возможности изменения скорости вращения рабочих колес вентилятора (и, как следствие, изменения производительности и эксплуатационного давления воздушного потока), то есть, возможности адаптации под текущие условия эксплуатации;
- отсутствие возможности оптимального выравнивания между собой скоростей вращения рабочих колес одного и другого направления вращения для повышения суммарной производительности вентилятора.
Наиболее близким по технической сущности к заявляемому решению является двухдвигательный электропривод (А.с. СССР №1705997 от 15.01.1992 на изобретение ДВУХДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД, МПК5 Н02Р 5/46, Заявитель: Научно-производственное объединение «Ротор»), содержащий первый 1 и второй 5 электродвигатели, первый 2 и второй 6 датчики положения, первый 3 и второй 7 датчики скорости, первый 4 и второй 8 регуляторы тока, регулятор положения 9, задатчик положения 10, регулятор скорости 11, первый 12 и второй 19 сумматоры, регуляторы рассогласования по положению 13 и скорости 16, первый 14, второй 17 и третий 18 инверторы, задатчик рассогласования по положению 15.
Основные недостатки данного технического решения следующие:
- отсутствие возможности изменения скорости перемещения исполнительных механизмов электропривода, то есть, возможности адаптации под текущие условия эксплуатации;
- отсутствие контроля напряжения питающей сети;
- отсутствие защит от перегрева силового оборудования;
- отсутствие возможности дистанционного управления и контроля состояния среды объекта, в котором осуществляется эксплуатация электропривода (например, задымление, наличие взрывоопасных газов и взвесей нефтепродуктов в воздухе).
Авторы считают возможным вместо термина «датчик положения», примененного в прототипе, в заявляемом техническом решении - использовать термин «датчик положения ротора».
Целью изобретения является расширение функциональных возможностей двухдвигательного электропривода для эффективного использования в шахтной вентиляционной установке.
Поставленная цель достигается тем, что в вентильно-индукторный электропривод шахтной вентиляционной установки, состоящий из первого и второго электродвигателя, первого и второго датчика положения ротора, введены первая и вторая сеть переменного тока; блок управления, включающий первый и второй датчик напряжения, первый и второй выпрямитель, первая и вторая панель индикации и управления, первый и второй фильтр, первая и вторая микроконтроллерная система управления, первый и второй силовой инвертор, первый и второй датчик тока; блок вентиляторов встречного вращения, включающий первое и второе рабочее колесо вентилятора, первый и второй датчик вибрации, первый и второй блок датчиков температуры; блок датчиков давления и подачи воздуха, блок датчиков задымления, система аэрогазового контроля и пункт управления горного диспетчера;
причем, в качестве первого и второго электродвигателя использованы индукторные двигатели;
выход первой сети переменного тока, через последовательно соединенные первый выпрямитель, первый фильтр, первый силовой инвертор, первый датчик тока и первый электродвигатель, подключен к входу первого рабочего колеса вентилятора;
выход второй сети переменного тока, через последовательно соединенные второй выпрямитель, второй фильтр, второй силовой инвертор, второй датчик тока и второй электродвигатель, подключен к входу второго рабочего колеса вентилятора;
первый вход-выход первой микроконтроллерной системы управления соединен с первым входом-выходом второй микроконтроллерной системы управления, второй вход-выход - с входом-выходом первой панели индикации и управления, третий вход-выход - с первым входом-выходом системы аэрогазового контроля;
к первому входу первой микроконтроллерной системы управления через первый датчик напряжения подключен выход первой сети переменного тока, ко второму входу - первый выход блока датчиков задымления, к третьему входу - первый выход блока датчиков давления и подачи воздуха, к четвертому входу - через первый блок датчиков температуры третий выход первого электродвигателя, к пятому входу - через первый датчик вибрации второй выход первого электродвигателя, к шестому входу - через первый датчик положения ротора первый выход первого электродвигателя, к седьмому входу - информационный выход первого датчика тока, к восьмому входу - информационный выход первого силового инвертора; выход первой микроконтроллерной системы управления подключен к управляемому входу первого силового инвертора;
второй вход-выход второй микроконтроллерной системы управления соединен с входом-выходом второй панели индикации и управления, третий вход-выход - со вторым входом-выходом системы аэрогазового контроля;
к первому входу второй микроконтроллерной системы управления через второй датчик напряжения подключен выход второй сети переменного тока, ко второму входу - второй выход блока датчиков задымления, к третьему входу - второй выход блока датчиков давления и подачи воздуха, к четвертому входу - через второй блок датчиков температуры третий выход второго электродвигателя, к пятому входу - через второй датчик вибрации второй выход второго электродвигателя, к шестому входу - через второй датчик положения ротора первый выход второго электродвигателя, к седьмому входу - информационный выход второго датчика тока, к восьмому входу - информационный выход второго силового инвертора;
выход второй микроконтроллерной системы управления подключен к управляемому входу второго силового инвертора;
вход-выход пункта управления горного диспетчера соединен с третьим входом-выходом системы аэрогазового контроля.
Кроме этого, первый и второй электродвигатель, первый и второй датчик положения ротора включены в блок вентиляторов встречного вращения.
Первая и вторая микроконтроллерная система управления выполнены с возможностью информационного взаимодействия между собой для скоординированного управления первым и вторым электродвигателем, а также с возможностью информационного взаимодействия через систему аэрогазового контроля с пунктом управления горного диспетчера.
Сущность изобретения состоит в том, что в предлагаемом вентильно-индукторном приводе шахтной вентиляционной установки для обеспечения эффективного местного проветривания реализована возможность оптимального соотношения (и, в частности, взаимного выравнивания) частот встречного вращения рабочих колес двух вентиляторов, скомпонованных в едином блоке, путем скоординированного управления индукторными двигателями, причем, в широком диапазоне регулирования давления и производительности вентиляторов.
Сущность изобретения поясняется:
- фиг. 1, на которой представлена функционально-структурная схема вентильно-индукторного привода шахтной вентиляционной установки;
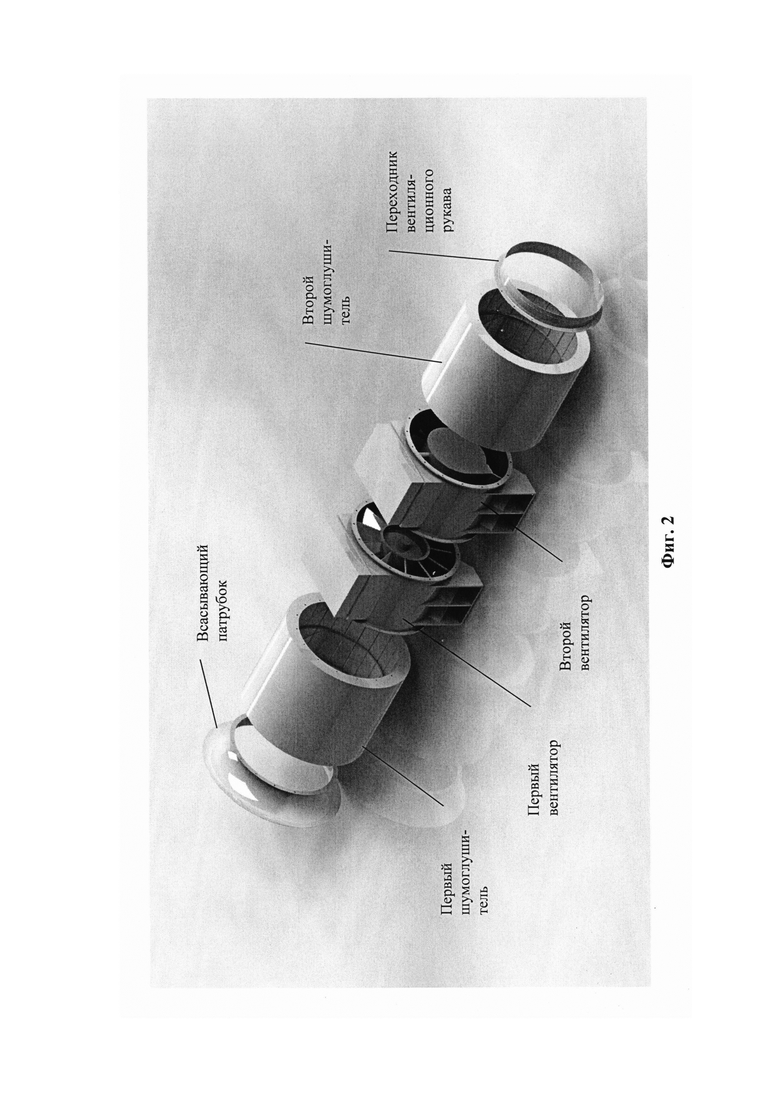
- фиг. 2, на которой представлено конструктивное исполнение блока вентиляторов встречного вращения.
Согласно фиг. 1 вентильно-индукторный привод содержит первую 1 и вторую 2 сеть переменного тока, блок управления 3, первый 4 и второй 7 датчик напряжения, первый 5 и второй 6 выпрямитель, первую 8 и вторую 11 панель индикации и управления, первый 9 и второй 10 фильтр, первую 12 и вторую 15 микроконтроллерную систему управления, первый 13 и второй 14 силовой инвертор, первый 16 и второй 17 датчик тока, блок вентиляторов встречного вращения 18, первый 19 и второй 23 датчик положения ротора, первый 20 и второй 22 электродвигатель, первое 21 и второе 26 рабочее колесо вентилятора, первый 24 и второй 28 датчик вибрации, первый 25 и второй 27 блок датчиков температуры, блок датчиков давления и подачи воздуха 29, блок датчиков задымления 30, система аэрогазового контроля 31 и пункт управления горного диспетчера 32.
Выход первой сети переменного тока 1, через последовательно соединенные первый выпрямитель 5, первый фильтр 9, первый силовой инвертор 13, первый датчик тока 16 и первый электродвигатель 20, подключен к входу первого рабочего колеса вентилятора 21.
Выход второй сети переменного тока 2, через последовательно соединенные второй выпрямитель 6, второй фильтр 10, второй силовой инвертор 14, второй датчик тока 17 и второй электродвигатель 22, подключен к входу второго рабочего колеса вентилятора 26.
Первый вход-выход первой микроконтроллерной системы управления 12 соединен с первым входом-выходом второй микроконтроллерной системы управления 15, второй вход-выход - с входом-выходом первой панели индикации и управления 8, третий вход-выход - с первым входом-выходом системы аэрогазового контроля 31.
К первому входу первой микроконтроллерной системы управления 12 через первый датчик напряжения 4 подключен выход первой сети переменного тока 1, ко второму входу - первый выход блока датчиков задымления 30, к третьему входу - первый выход блока датчиков давления и подачи воздуха 29, к четвертому входу - через первый блок датчиков температуры 25 третий выход первого электродвигателя 20, к пятому входу - через первый датчик вибрации 24 второй выход первого электродвигателя 20, к шестому входу - через первый датчик положения ротора 19 первый выход первого электродвигателя 20, к седьмому входу - информационный выход первого датчика тока 16, к восьмому входу - информационный выход первого силового инвертора 13.
Выход первой микроконтроллерной системы управления 12 подключен к управляемому входу первого силового инвертора 13.
Второй вход-выход второй микроконтроллерной системы управления 15 соединен с входом-выходом второй панели индикации и управления 11, третий вход-выход - со вторым входом-выходом системы аэрогазового контроля 31.
К первому входу второй микроконтроллерной системы управления 15 через второй датчик напряжения 7 подключен выход второй сети переменного тока 2, ко второму входу - второй выход блока датчиков задымления 30, к третьему входу - второй выход блока датчиков давления и подачи воздуха 29, к четвертому входу - через второй блок датчиков температуры 27 третий выход второго электродвигателя 22, к пятому входу - через второй датчик вибрации 28 второй выход второго электродвигателя 22, к шестому входу - через второй датчик положения ротора 23 первый выход второго электродвигателя 22, к седьмому входу - информационный выход второго датчика тока 17, к восьмому входу - информационный выход второго силового инвертора 14.
Выход второй микроконтроллерной системы управления 15 подключен к управляемому входу второго силового инвертора 14.
Вход-выход пункта управления горного диспетчера 32 соединен с третьим входом-выходом системы аэрогазового контроля 31.
Первая 1 и вторая 2 сеть переменного тока представляет собой трехфазную сеть переменного тока частой 50 Гц, а применительно к эксплуатации вентильно-индукторного привода в шахтных условиях - это, как правило, сеть 3~50 Гц напряжением 660 В с изолированной нейтралью.
Блок управления 3 является управляющей частью вентильно-индукторного электропривода шахтной вентиляционной установки, в конструктиве которого скомпонованы два идентичных комплекта элементов, образующих два независимых, но информационно взаимодействующих, канала управления и обеспечивающих как непосредственное управление блоком вентиляторов встречного вращения 18, так и дистанционный контроль состояния объекта, в среде которого осуществляется эксплуатация электропривода.
Датчики напряжения 4 и 7 предназначены для контроля значений напряжения сетей переменного тока 1 и 2.
Выпрямители 5 и 6 обеспечивают преобразование напряжения переменного тока питающей сети в напряжение постоянного тока.
Панели индикации и управления 8 и 11 представляет собой комплект средств отображения информации (индикаторы, табло и т.д.) и органов управления (кнопки, тумблеры и т.д.).
Фильтры 9 и 10 обеспечивают сглаживание напряжения постоянного тока на выходе выпрямителей 5 и 6.
Микроконтроллерные системы управления 12 и 15 реализованы на базе высокопроизводительных микроконтроллеров, имеющих в своем составе оперативное запоминающее устройство, энергонезависимую память, таймер, аналогово-цифровой преобразователь, каналы дискретного ввода-вывода и каналы цифрового управления с блоками драйверов IGBT-ключей и т.п.
Силовые инверторы 13 и 14, обеспечивающие питание обмотки статора электродвигателей 20 и 22, представляют собой управляемые многофазные (в частном случае, трехфазные) преобразователи напряжения постоянного тока в переменное напряжение, реализованные на IGBT-ключах (IGBT-транзисторах). Для контроля теплового режима на радиаторах охлаждения IGBT-ключей установлены датчики температуры (на фиг. 1 - не показаны)
Датчики тока 16 и 17 предназначены для контроля токов, потребляемых фазными обмотками статора электродвигателями 20 и 22.
Блок вентиляторов встречного вращения 18 является исполнительной частью вентильно-индукторного электропривода шахтной вентиляционной установки. Конструктивное исполнение блока 18 представлено на фиг. 2, где для наглядности, его основные модули несколько разнесены между собой по продольной оси (по оси воздушного потока) блока.
Блок 18 обеспечивает два режима (основной и дополнительный):
- забор свежего воздуха через всасывающий патрубок и первый шумоглушитель первым вентилятором, рабочее колесо которого вращается, например, по часовой стрелке в воздушный промежуток (цилиндрической формы) между плоскостями рабочих колес первого и второго вентиляторов (первый аэродинамический каскад блока) и дальнейшая подача (нагнетание) этого воздуха вторым вентилятором, рабочее колесо которого вращается уже против часовой стрелки через второй шумоглушитель, переходник вентиляционного рукава и вентиляционный рукав шахтной системы вентиляции в подземную рабочую зону шахты (второй аэродинамический каскад блока);
- отсос загрязненного воздуха (задымленного, содержащего взрывоопасные газы и взвеси нефтепродуктов и т.п.) из подземной рабочей зоны шахты и выдача его на поверхность при реверсе воздушного потока, обеспечиваемого теперь уже вращением рабочего колеса второго вентилятора по часовой стрелке, а рабочего колеса первого вентилятора - против часовой стрелки.
В конструкции блока 18 отсутствуют какие-либо направляющие и спрямляющие аппараты (как неподвижные, так и подвижные), что значительно уменьшает потери энергии на «замедление» и паразитные завихрения воздушного потока, пронизывающего проточную зону классического осевого вентилятора с направляющими и спрямляющими аппаратами, а возможность оптимального соотношения (и, в частности, взаимного выравнивания) частот встречного вращения рабочих колес двух вентиляторов при скоординированном управлении индукторными двигателями в широком диапазоне регулирования давления и производительности, позволяет значительно снизить вероятность возникновения неоднозначных и неустойчивых режимов работы и обеспечить реализацию высоконагруженной аэродинамической схемы блока, причем, без возникновения, так называемых, «впадин давления» на расходно-напорной характеристике вентилятора и практически без закручивания воздушного потока на выходе.
Расчет параметров составных частей рабочих колес (конструкция кока, диаметр втулки; форма, профиль и угол установки лопастей) первого и второго вентиляторов для высоконагруженной аэродинамической схемы, а также определение оптимального значения воздушного промежутка между плоскостями рабочих колес первого и второго вентиляторов выполняется с помощью специализированных программных пакетов аэродинамического моделирования, например, «FlowWorks», «FlowVision» и т.п., что позволяет обеспечить максимально высокий КПД блока 18.
Отметим, что выход из строя одного из вентиляторов, внешне проявляющийся как заклинивание или неуправляемое (свободное) самовращение рабочего колеса, приводит лишь к определенному снижению производительности, а не к полному отказу работоспособности блока 18. Кроме этого, в связи с тем, что в рабочих колесах лопасти первого и второго вентиляторов жестко зафиксированы с постоянными углами установки (то есть, являются неповоротными), значительно повышается надежность функционирования блока 18 в целом.
В качестве датчиков положения ротора 19 и 23 для определения относительного положения продольной оси ротора и осей фаз статорной обмотки индукторного двигателя могут быть использованы датчики разных типов, например, индукционные, индуктивные, гальваномагнитные и фотоэлектрические датчики.
Электродвигатели 20 и 22 (индукторные двигатели) представляют собой электромеханические преобразователи энергии с многофазной (в частном случае, трехфазной) обмоткой статора, образующей «m» - полюсов электромагнитной системы двигателя, и безобмоточного ротора с «n» - магнитными зубцами.
В качестве рабочих колес вентиляторов 21 и 26, являющихся исполнительными механизмами вентильно-индукторного привода, предполагается использовать крыльчатки с неподвижными лопастями.
В качестве датчиков вибрации 24 и 28, предназначенных для контроля уровня вибраций выходного вала электродвигателей 20 и 22, вызванных разбалансировкой рабочих колес вентилятора из-за неравномерного налипания пыли на лопасти, предполагается использовать датчики инерционного типа.
Блоки датчиков температуры 25 и 27 предназначены для контроля температурного режима катушек обмотки статора и подшипников электродвигателей 20 и 22.
В блоке датчиков давления и подачи воздуха 29, предназначенных для контроля давления и производительности вентиляционных установок, предполагается использовать, например, дифференциальные манометры ДМ-3564 и ДМ-3566 в комплекте с вторичными приборами двух модификаций: ДМИ-Т для определения напора воздуха (тягомер) и ДМИ-Р для контроля производительности (подачи или расхода воздуха).
В качестве блока датчиков задымления 30 предполагается использовать набор датчиков обнаружения - устройств, реализованных на различных физических принципах, например, фотоэлектрические пожарные датчики типа TSD-90 А.
В качестве системы аэрогазового контроля 31 предполагается использовать газоаналитическую шахтную многофункциональную систему типа «Микон III», предназначенную для непрерывного измерения параметров состояния промышленных и горно-технологических объектов, в том числе параметров шахтной атмосферы и микроклимата, состояния горного массива, состояния основного и вспомогательного технологического оборудования, осуществления местного и централизованного диспетчерского ручного, автоматизированного и автоматического управления оборудованием, обмена информацией с диспетчерским пунктом, обработки информации, ее отображения и хранения.
Пункт управления горного диспетчера 32 представляет собой сложный аппаратно-программный комплекс (пульт управления горного диспетчера с мнемосхемой, средства вычислительной техники, каналы межмашинного обмена локальных вычислительных сетей, средства телемеханики, связи и т.д.).
Предлагаемый привод работает следующим образом.
Перед началом использования вентильно-индукторного электропривода шахтной вентиляционной установки по прямому назначению включаются источники питания (с целью упрощения на фиг. 1 - не показаны), обеспечивающие электропитание первой 12 и второй 15 микроконтроллерной системы управления стабилизированным низковольтным напряжением постоянного тока (например, напряжением=15 В). После поступления электропитания, микроконтроллеры осуществляют загрузку из энергонезависимой памяти в оперативное запоминающее устройство тестовых программ, которые осуществляют проверку работоспособности аппаратуры; загрузку и инициализацию программ управления первой 12 и второй 15 микроконтроллерной системы управления и вывод результатов проверки и информации о готовности к работе на средства отображения информации панелей индикации и управления 8 и 11. Затем, на основании данных о состоянии объекта, эксплуатационный персонал с помощью органов управления на панелях индикации и управления 8 и 11 задает необходимый (в текущий период времени) режим работы блока 18 и значение скорости вращения его вентиляторов.
Далее, включаются первая 1 и вторая 2 сети переменного тока, питающие напряжения которых через датчики напряжения 4 и 7 поступают на первые входы микроконтроллерных систем управления 12 и 15, а через выпрямители 5 и 6, фильтры 9 и 10 - на вход первого 13 и второго 14 силового инвертора. В случае, нахождения значений напряжения сетей переменного тока 1 и 2 в допустимом интервале, микроконтроллерные системы управления 12 и 15 начинают ШИМ-управление силовыми инверторами 13 и 14, которые производят преобразование напряжения постоянного тока с выхода фильтров 9 и 10 в регулируемое напряжение переменного тока. При поступлении питающих напряжений переменного тока от силовых инверторов 13 и 14 в многофазные обмотки, образующие «m» электромагнитных полюсов статоров индукторных двигателей 20 и 22, создаются вращающееся электромагнитные поля, которое взаимодействуя с «n» магнитными зубцами роторов, увлекают их за собой, создавая вращающие моменты и «раскручивая» роторы индукторных двигателей 20 и 22, на выходных валах которых находятся рабочие колеса вентиляторов 21 и 26. При этом, от датчиков тока 16 и 17 и от датчиков положения ротора 19 и 23 начинают поступать сигналы обратной связи, позволяющие микроконтроллерным системам управления 12 и 15 оперативно корректировать моменты подачи импульсов, ширину и значение пауз управляющих импульсов и т.д. для управления силовыми инверторами 13 и 14, производя, в соответствии алгоритмом программ управления, плавный разгон вентиляторов. Кроме этого, оперативный опрос датчиков тока 16 и 17 позволяет исключить работу привода с обрывом фаз обмоток статоров двигателей 20 и 22.
Одновременно, от блоков датчиков температуры 25 и 27 и от датчиков температуры, установленных на радиаторах охлаждения IGBT-ключей (на фиг. 1 - не показаны) силовых инверторов 13 и 14, на входы микроконтроллерных систем управления 12 и 15 поступают сигналы, учет которых в ШИМ-управлении силовыми инверторами 13 и 14 позволяет предотвратить перегрев основных силовых компонентов привода.
Для реализации возможности оптимального соотношения частот встречного вращения рабочих колес двух вентиляторов управляемыми индукторными двигателями в широком диапазоне регулирования давления и производительности блока 18, предусмотрено информационное взаимодействие микроконтроллерных систем управления 12 и 15 с помощью первых входов-выходов.
В случае, поступлении сигналов от блока датчиков давления и подачи воздуха 29 (например, сигнала о снижении давления воздушного потока в контролируемой точке объекта) и/или от системы аэрогазового контроля 31 (например, о превышении допустимой концентрации взрывоопасных газов), а также телеметрической команды из пункта управления горного диспетчера 32 (например, о необходимости увеличения производительности), микроконтроллерные системы управления 12 и 15 автоматически осуществляют соответствующую корректировку ШИМ-управления силовыми инверторами 13 и 14.
При возникновении возгорания в контролируемой зоне объекта, по сигналу от блока датчиков задымления 30 и/или по телеметрической команде из пункта управления горного диспетчера 32, микроконтроллерные системы управления 12 и 15 реализуют автоматический переход блока вентиляторов встречного вращения 18 из основного режима в дополнительный, осуществив реверс воздушного потока.
В общем случае, давление и производительность, развиваемые блоком вентиляторов встречного вращения 18, обеспечиваются ориентировочно на 50% первым и на 50% вторым вентиляторами, а в случае же, выхода из строя одного из двух канала управления в блоке управления 3 или одного из вентиляторов в блоке 18, микроконтроллерная система управления в канале управления (оставшегося работоспособным), выполнит максимально возможное наращивание давления и производительности вентилятора (оставшегося в строю) и одновременно проинформирует о снижении работоспособности шахтной вентиляционной установки пункт управления горного диспетчера 32.
Датчики вибрации 24 и 28 обеспечивают возможность принятия своевременных мер по техническому обслуживанию рабочих колес при эксплуатации привода в условиях высокой запыленности воздуха с целью продления сроков службы подшипников электродвигателей 20 и 22.
К техническим результатам - конкурентным преимуществам, полученным в предлагаемом изобретении, относятся следующие:
- повышенная суммарная производительность вентиляционной установки;
- возможность по адаптации вентиляционной установки к изменяющимся условиям эксплуатации в широком диапазоне регулирования производительности при сохранении высокой аэродинамической устойчивости;
- возможность контроля состояния воздушной среды объекта, в котором осуществляется эксплуатация вентиляционной установки;
- обеспечение возможности дистанционного управления режимами работы привода и скоростью вращения вентиляторов от внешней системы управления (пункт управления горного диспетчера);
- контроль значений напряжения питающих сетей;
- возможность контроля обрыва фазных обмоток двигателей;
- защита от перегрева силового оборудования;
- высокий КПД и повышенная эксплуатационная надежность привода вентиляционной установки в целом.
Промышленная применимость изобретения определяется тем, что предлагаемый вентильно-индукторный привод шахтной вентиляционной установки может быть изготовлен в соответствии с приведенным описанием и чертежами на базе известных комплектующих изделий и технологического оборудования.
Предлагаемые технические решения предполагается практически реализовать ЗАО «ИРИС» совместно с Акционерной Компанией «АЛРОСА» (публичное акционерное общество) в опытном образце вентильно-индукторного привода шахтной вентиляционной установки местного проветривания на руднике «Мир» Мирнинского ГОК.
На основании вышеизложенного и по результатам проведенного нами патентно-информационного поиска считаем, что предлагаемый вентильно-индукторный привод шахтной вентиляционной установки отвечает критериям «Новизна», «Изобретательский уровень» и «Промышленная применимость» и может быть защищен патентом РФ на изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПИТАНИЯ ВЕНТИЛЬНО-ИНДУКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2368059C2 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2015 |
|
RU2605957C1 |
| Способ и устройство для расширения скоростного диапазона и обеспечения живучести трехфазного вентильного электродвигателя | 2022 |
|
RU2790625C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2003 |
|
RU2257663C2 |
| СПОСОБ УПРАВЛЕНИЯ ИНДУКТОРНЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402148C1 |
| ВЫСОКОВОЛЬТНЫЙ РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2008 |
|
RU2382480C2 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ С МИНИМАЛЬНЫМИ ШУМАМИ, ВИБРАЦИЯМИ И ПУЛЬСАЦИЯМИ МОМЕНТА, СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2483416C1 |
| ШЕСТИФАЗНЫЙ ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ДВИГАТЕЛЬ, УПРАВЛЯЕМЫЙ ТРЕХФАЗНЫМ ТОКОМ СИНУСОИДАЛЬНОЙ ФОРМЫ | 2012 |
|
RU2494518C1 |
| ВЕНТИЛЬНЫЙ ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД | 2004 |
|
RU2274944C1 |

Изобретение относится к области электротехники. Технический результат заключается в расширении функциональных возможностей двухдвигательного элетропривода для эффективного использования в шахтной вентиляционной установке. Вентильно-индукторный привод содержит первую (1) и вторую (2) сеть переменного тока, блок управления (3), первый (4) и второй (7) датчик напряжения, первый (5) и второй (6) выпрямитель, первую (8) и вторую (11) панель индикации и управления, первый (9) и второй (10) фильтр, первую (12) и вторую (15) микроконтроллерную систему управления, первый (13) и второй (14) силовой инвертор, первый (16) и второй (17) датчик тока, блок вентиляторов встречного вращения (18), первый (19) и второй (23) датчик положения ротора, первый (20) и второй (22) электродвигатель, первое (21) и второе (26) рабочее колесо вентилятора, первый (24) и второй (28) датчик вибрации, первый (25) и второй (27) блок датчиков температуры, блок датчиков давления и подачи воздуха (29), блок датчиков задымления (30), система аэрогазового контроля (31) и пункт управления горного диспетчера (32). 3 з.п. ф-лы, 2 ил.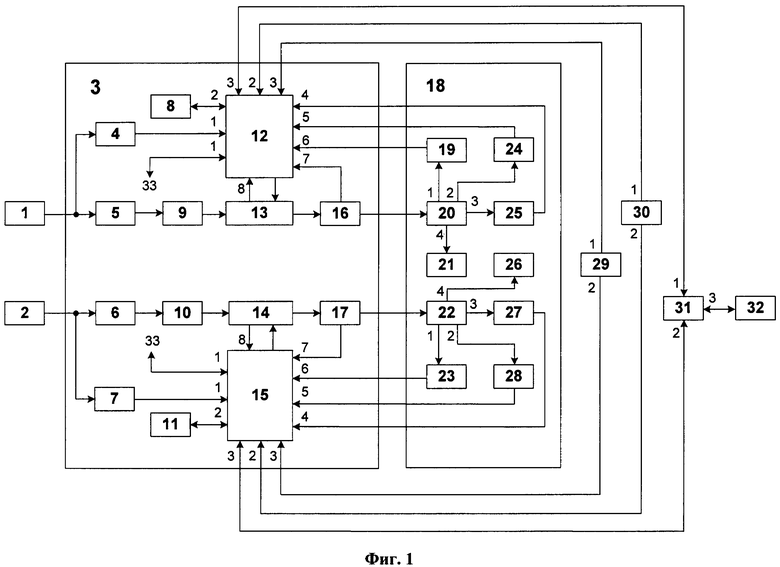
1. Вентильно-индукторный привод шахтной вентиляционной установки, содержащий первый и второй электродвигатель, первый и второй датчик положения ротора, отличающийся тем, что в него введены первая и вторая сеть переменного тока; блок управления, включающий первый и второй датчик напряжения, первый и второй выпрямитель, первая и вторая панель индикации и управления, первый и второй фильтр, первая и вторая микроконтроллерная система управления, первый и второй силовой инвертор, первый и второй датчик тока; блок вентиляторов встречного вращения, включающий первое и второе рабочее колесо вентилятора, первый и второй датчик вибрации, первый и второй блок датчиков температуры; блок датчиков давления и подачи воздуха, блок датчиков задымления, система аэрогазового контроля и пункт управления горного диспетчера;
причем в качестве первого и второго электродвигателя использованы индукторные двигатели;
выход первой сети переменного тока, через последовательно соединенные первый выпрямитель, первый фильтр, первый силовой инвертор, первый датчик тока и первый электродвигатель, подключен к входу первого рабочего колеса вентилятора;
выход второй сети переменного тока, через последовательно соединенные второй выпрямитель, второй фильтр, второй силовой инвертор, второй датчик тока и второй электродвигатель, подключен к входу второго рабочего колеса вентилятора;
первый вход-выход первой микроконтроллерной системы управления соединен с первым входом-выходом второй микроконтроллерной системы управления, второй вход-выход - с входом-выходом первой панели индикации и управления, третий вход-выход - с первым входом-выходом системы аэрогазового контроля;
к первому входу первой микроконтроллерной системы управления через первый датчик напряжения подключен выход первой сети переменного тока, ко второму входу - первый выход блока датчиков задымления, к третьему входу - первый выход блока датчиков давления и подачи воздуха, к четвертому входу - через первый блок датчиков температуры третий выход первого электродвигателя, к пятому входу - через первый датчик вибрации второй выход первого электродвигателя, к шестому входу - через первый датчик положения ротора первый выход первого электродвигателя, к седьмому входу - информационный выход первого датчика тока, к восьмому входу - информационный выход первого силового инвертора;
выход первой микроконтроллерной системы управления подключен к управляемому входу первого силового инвертора;
второй вход-выход второй микроконтроллерной системы управления соединен с входом-выходом второй панели индикации и управления, третий вход-выход - со вторым входом-выходом системы аэрогазового контроля;
к первому входу второй микроконтроллерной системы управления через второй датчик напряжения подключен выход второй сети переменного тока, ко второму входу - второй выход блока датчиков задымления, к третьему входу - второй выход блока датчиков давления и подачи воздуха, к четвертому входу - через второй блок датчиков температуры третий выход второго электродвигателя, к пятому входу - через второй датчик вибрации второй выход второго электродвигателя, к шестому входу - через второй датчик положения ротора первый выход второго электродвигателя, к седьмому входу - информационный выход второго датчика тока, к восьмому входу - информационный выход второго силового инвертора;
выход второй микроконтроллерной системы управления подключен к управляемому входу второго силового инвертора;
вход-выход пункта управления горного диспетчера соединен с третьим входом-выходом системы аэрогазового контроля.
2. Вентильно-индукторный электропривод по п. 1 отличающийся тем, что первый и второй электродвигатель, первый и второй датчик положения ротора включены в блок вентиляторов встречного вращения.
3. Вентильно-индукторный электропривод по п. 1, отличающийся тем, что первая и вторая микроконтроллерная система управления выполнены с возможностью информационного взаимодействия между собой для скоординированного управления первым и вторым электродвигателем
4. Вентильно-индукторный электропривод по п. 1, отличающийся тем, что первая и вторая микроконтроллерная система управления выполнены с возможностью информационного взаимодействия через систему аэрогазового контроля с пунктом управления горного диспетчера.
| Двухдвигательный электропривод | 1989 |
|
SU1705997A1 |
| Двухдвигательный электропривод переменного тока | 1985 |
|
SU1292159A1 |
| Вентильный электропривод | 1990 |
|
SU1697251A1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| KR 101048938 B1, 12.07.2011. | |||

