Заявляемые объекты объединены одним изобретательским замыслом, относятся к радиотехнике и могут быть использованы в навигационных, пеленгационных, локационных средствах для определения местоположения априорно неизвестного источника радиоизлучения (ИРИ).
Известен способ, реализованный в подвижном пеленгаторе, описанном в Пат. РФ №2124222, МПК G01S 13/46, опубл. 27.12.1998 г. Он включает прием сигналов источников радиоизлучений в заданной полосе частот AF перемещающимся в пространстве пеленгатором, измерение первичных пространственно-информационных параметров (ППИП) обнаруженных сигналов с одновременным измерением вторичных параметров: времени измерения ППИП, координат местоположения и ориентации (в азимутальной плоскости) антенной решетки подвижного пеленгатора, преобразование ППИП в пространственные параметры: азимутальный угол θ, θ=0, 1, …, 360° и угол места β, β=0, 1, …, 90°. Способ-аналог позволяет определить параметры криволинейных траекторий перемещения объекта.
Однако аналог обладает недостаточной точностью измерения координат ИРИ в силу того, что в нем реализована двухэтапная обработка результатов измерений. На первом этапе в каждой j-й точке, j=1, 2, …, J, измеряют пространственные параметры θj и βj, которые на втором этапе используют для вычисления местоположения ИРИ. В книге (Кондратьев B.C. и др. Многопозиционные радиотехнические системы / B.C. Кондратьев, А.Ф. Котов, Л.Н. Марков; Под ред. проф. В.В. Цветнова. - М.: Радио и связь, 1989 г., - 264 с. ) показано, что системы с двухэтапной обработкой дают худшие результаты, чем при оптимальной одноэтапной обработке.
Известен способ определения координат ИРИ, описанный в Пат. РФ №2536609, МПК G01S 5/04, опубл. 28.10.2014 г., бюл. №36. На подготовительном этапе аналог включает вычисление количества N=S/S0 элементарных зон привязки, где S и S0 соответственно площади зоны контроля и элементарной зоны привязки, присвоение каждой элементарной зоне привязки порядкового номера n, n=1, 2, …, N, определение координат местоположения центров элементарных зон привязки {X, Y}n, расчет и запоминание эталонных значений ППИП на выходах Am,l-ных антенных элементов, где m, l=1, 2, …, М, m≠l, М>2, относительно направлений прихода тестирующего сигнала с дискретностью Δθk, k=1, 2, …, К; К·Δθk=2π; причем ППИП рассчитываются для средних частот  , а в процессе работы при обнаружении сигнала ИРИ на частоте способ-аналог включает измерения ППИП на выходах Am,l-ных антенных элементов (АЭ) решетки с одновременным измерением вторичных параметров, вычисление для каждого направления в горизонтальной плоскости разности между эталонными и измеренными значениями ППИП, возведение в квадрат полученных разностей и их суммирование, формирование матрицы измерений Rj(θc,n)ν из сумм
, а в процессе работы при обнаружении сигнала ИРИ на частоте способ-аналог включает измерения ППИП на выходах Am,l-ных антенных элементов (АЭ) решетки с одновременным измерением вторичных параметров, вычисление для каждого направления в горизонтальной плоскости разности между эталонными и измеренными значениями ППИП, возведение в квадрат полученных разностей и их суммирование, формирование матрицы измерений Rj(θc,n)ν из сумм  , определение после выполнения J измерений ППИП минимальной суммы
, определение после выполнения J измерений ППИП минимальной суммы  в элементах матрицы измерений Rj(θc,n)ν, принятие координат местоположения центра элементарной зоны привязки {X, Y}n, соответствующие min за координаты местоположения обнаруженного ИРИ.
в элементах матрицы измерений Rj(θc,n)ν, принятие координат местоположения центра элементарной зоны привязки {X, Y}n, соответствующие min за координаты местоположения обнаруженного ИРИ.
Аналог позволяет повысить доступность и точность определения координат ИРИ за счет реализации одноэтапной обработки результатов измерений и размещения пеленгатора на летно-подъемном средстве (ЛПС), учета его пространственной ориентации.
Однако точность определения координат ИРИ с борта ЛПС в диапазоне волн 30-300 МГц остается низкой в силу несогласованных размеров пеленгаторной антенной системы.
Наиболее близким по своей технической сущности к заявляемому является способ определения координат источника радиоизлучения в Пат. РФ №2305851, МПК G01S 5/04, опубл. 10.09.2007 г. Прототип включает прием сигнала ИРИ на антенно-приемные модули (АПМ), установленные на двух движущихся механически связанных носителях и образующих узкобазисную систему основной позиции (ОП) и выносную позицию (ВП) пассивного локатора (ПЛ), обнаружение сигналов ИРИ и определение его несущей частоты, формирование во время движения ОП и ВП квадратурных составляющих огибающих сигнала ИРИ на выходах АПМ, неоднократное измерение на интервале дальности, являющимся интервалом синтезирования, этих квадратурных составляющих и их совместное запоминание с временем измерения и положением фазового центра приемной антенны АПМ в пространстве ОП и ВП в момент каждого такта измерения этих огибающих с последующим нахождением на основе данных, полученных на интервале синтезирования, местоположения ИРИ.
Способ-прототип позволяет повысить точность определения координат ИРИ за счет использования выносного пункта путем увеличения (согласования) базы пеленгования.
Однако прототип обладает недостатками, ограничивающими его применение. К их числу можно отнести:
относительно низкую точность оценивания пространственных параметров сигнала ИРИ из-за несогласованной (узкобазисной) антенны ОП и отсутствия учета пространственной ориентации (не учитывается угол сноса ЛПС) носителя ОП;
перемещение ОП и ВП в пространстве относительно ИРИ коррелировано и не может быть оптимизировано относительно точностных характеристик;
не учитывается неизвестная отстройка частоты между АПМ и ИРИ;
фазовая нестабильность в приемном и передающем трактах ограничивает способ по времени когерентного накопления оцениваемого сигнала;
относительная сложность и значительная себестоимость измерителя (предполагает использование в качестве носителя самолет со значительными габаритами для размещения пеленгаторной антенны и многоканального оборудования).
Известно устройство определения координат источника радиоизлучения по Пат. РФ №2536609, МПК 5/04, опубл. 27.12.2014 г., бюл. №36. Устройство-аналог содержит блок определения пространственных параметров, первый, второй, третий, четвертый и пятый вычислители-формирователи, первый и второй блоки памяти, радионавигатор, устройство угловой ориентации, блок измерения первичных пространственно-информационных параметров, генератор синхроимпульсов, блок оценивания, блок определения координат и блок индикации, определенным образом соединенные между собой. Устройство размещается на летно-подъемном средстве (самолет, вертолет) и обеспечивает повышение доступности сигналов ИРИ УКВ-СВЧ-диапазонов частот и точность их местоопределения. Однако в силу значительных габаритных размеров пеленгаторной антенной системы блока определения пространственных параметров и сложности реализации собственно устройства определения координат ИРИ (габаритно-весовых характеристик) делает невозможным его размещение на беспилотных летательных аппаратах среднего и малого классов. Кроме того, использование аналога ограничено из-за высокой себестоимости носителя и его эксплуатации.
Наиболее близким по своей технической сущности к заявляемому устройству определения координат ИРИ является устройство по Пат. РФ №2550811, МПК G01S 13/46, опубл. 20.05.2015 г., бюл. №14.
Устройство-прототип содержит два и более беспилотных летательных аппарата (БПЛА) и наземный пункт управления (НПУ), причем каждый из БПЛА содержит последовательно соединенные контроллер, рулевой привод и аэродинамические рули, автопилот, группа информационных входов которого соединена с второй группой информационных выходов контроллера, первая группа информационных входов которого соединена с группой информационных выходов автопилота, двигательную установку, группа информационных входов которой соединена с третьей группой информационных выходов контроллера, первый приемопередающий модуль, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера, вторая группа информационных входов которого соединена с группой информационных выходов первого приемо-передающего модуля, последовательно соединенные блок видеонаблюдения, первое запоминающее устройство и передающий модуль, блок навигации БПЛА, группа информационных выходов которого соединена со второй группой информационных входов первого запоминающего устройства, а НПУ выполнен содержащим последовательно соединенные первый блок управления, предназначенный для управления взлетом, полетом и посадкой БПЛА, второй приемопередающий модель и первое устройство обработки и отображения информации, последовательно соединенные второе запоминающее устройство, выполненное L-канальным, устройство распознавания, выполненное L-канальным, второй блок управления, предназначенный для задания исходных данных и формирования команды на определение координат объектов, и второе устройство обработки и отображения информации, группа информационных выходов которого является первой выходной шиной НПУ, вторая группа информационных входов объединена со второй группой информационных входов второго блока управления и группой информационных выходов приемного модуля, выполненного L-канальным, группа информационных входов второго запоминающего устройства является входной шиной НПУ, вторая выходная шина которого соединена с второй группой информационных выходов устройства распознавания, третья группа информационных выходов которого соединена с группой адресных входов второго запоминающего устройства.
Устройство-прототип обеспечивает повышение пропускной способности за счет более эффективного обнаружения и распознавания заданных объектов на основе видеоизображений с борта нескольких БПЛА, путем реализации процедуры «компьютерного зрения».
Однако устройству-прототипу также присущ недостаток, связанный с низкой точностью определения координат объектов из-за неоптимальных габаритных размеров пеленгаторной антенны в рассматриваемом диапазоне частот, что в конечном счете существенно увеличивает временные затраты на обнаружение заданных объектов.
Целью заявленных технических решений является разработка способа и устройства определения координат ИРИ, обеспечивающих: повышение точности местоопределения ИРИ в УКВ-СВЧ-диапазонах частот благодаря использованию метода синтеза разностной апертуры (CPA) и оптимизации маршрутов полета носителей.
В заявленном способе поставленная цель достигается тем, что в известном способе определения координат источника радиоизлучения, состоящем в том, что принимают сигнал источника радиоизлучения на антенно-приемные модули, установленные на двух движущихся механически связанных носителях и образующих основную и выносную позиции пассивного локатора, обнаруживают сигнал ИРИ и определяют его несущую частоту, формируют во время движения с помощью ОП и ВП квадратурные составляющие огибающих сигнала ИРИ на выходах АПМ с частотой Fds, неоднократно измеряют на интервале дальности, являющемся интервалом синтезирования, эти квадратурные составляющие и их совместно запоминают с временем измерения в момент каждого такта оценивания этих огибающих с последующим следующим нахождением на основе данных, полученных на интервалах синтезирования, местоположения ИРИ. Используют N выносных позиций пассивных локаторов, N≥1, базирующихся на отдельных носителях, формируют наземный пункт управления (НПУ), по командам которого осуществляют одновременный синхронный прием сигнала ИРИ антенно-приемными модулями ОП и ВП и формирование квадратурных составляющих огибающих сигнала и передачу их по соответствующим каналам связи на НПУ совместно с данными о времени приема сигнала ti и пространственном положении фазовых центров приемных антенн АПМ ОП и ВП, совместное упорядоченное запоминание на НПУ значений квадратурных составляющих сигнала и их временных параметров, а также временных и пространственных параметров, соответствующих ОП и ВП, формирование на их основе разностных траекторных значений S(ti) путем попарного перемножения запомненных квадратурных составляющих сигнала S1(ti), принятых на ОП в момент времени ti, с соответствующими комплексно сопряженными значениями квадратурных составляющих сигнала 
На основном и выносных позициях используются только по одному антенно-приемному модулю.
Для согласованной обработки результатов измерений умножают принятый разностный траекторный сигнал на опорную функцию, представляющую собой комплексно сопряженный разностный траекторный сигнал от ИРИ, расположенного в элементе разрешения с заданными координатами, накапливают сигнал по модулю в течение времени синтеза, нормируют, получают величины, характеризующие элементы разрешения, находят местоположение ИРИ путем поиска элемента разрешения с наибольшей данной величиной.
Синхронизацию измерения параметров на ОП и ВП осуществляют автономно каждым носителем с использованием меток времени спутниковой системы навигации.
Благодаря новой совокупности существенных признаков в заявляемом способе за счет использования метода синтеза разностной апертуры устраняется отстройка по частоте АПМ и ИРИ, нестабильность фазы в передающем тракте ИРИ, а также фазовая модуляция сигнала, чем и обеспечивается повышение точности определения координат ИРИ.
Поставленная цель в заявляемом устройстве достигается тем, что в известном устройстве, состоящем из двух и более идентичных беспилотных летательных аппаратов и наземного пункта управления, причем каждый из БПЛА содержит последовательно соединенные котроллер, рулевой привод и аэродинамические рули, автопилот, группа информационных входов которого соединена с второй группой информационных выходов контроллера, первая группа информационных входов которого соединена с группой информационных выходов автопилота, двигательную установку, группа информационных входов которой соединена с третьей группой информационных выходов контроллера, первый L-канальный приемопередающий модуль, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера, вторая группа информационных входов которого соединена с первой группой информационных выходов первого приемо-передающего модуля, последовательно соединенные первое запоминающее устройство и передающий модуль, блок навигации БПЛА, группа информационных выходов которого соединена со второй группой информационных входов первого запоминающего устройства, а НПУ выполнен содержащим последовательно соединенные первый блок управления, предназначенный для управления взлетом, полетом и посадкой БПЛА, второй L-канальный приемопередающий модель и первое устройство обработки и отображения информации, последовательно соединенные L-канальный приемный модуль, второй блок управления, предназначенный для задания исходных данных и формирования команды на определение координат источника радиосигнала и второе устройство обработки и отображения информации, группа информационных выходов которого является выходной шиной наземного пункта управления, дополнительно в каждый БПЛА введено по одному антенно-приемному модулю (АПМ), группа информационных выходов каждого из которых соединена с первой группой информационных входов соответствующего первого запоминающего устройства, а группа входов управления соединена со второй группой информационных выходов первого приемопередающего модуля, а в НПУ дополнительно введены коррелятор, группа информационных выходов которого соединена со второй группой информационных входов второго устройства обработки и отображения информации, а группа информационных входов объединена с первой группой входов второго блока управления, вторая группа выходов которого соединена со второй группой информационных входов второго приемо-передающего модуля, второе запоминающее устройство, группа информационных входов которого является второй установочной шиной наземного пункта управления, а группа информационных выходов соединена с третьей группой входов второго устройства обработки и отображения информации, а вторая группа информационных входов второго блока управления является первой установочной шиной наземного пункта управления.
Перечисленная новая совокупность существенных признаков за счет того, что вводятся новые элементы и связи, позволяет достичь цели изобретения: обеспечить повышение точности местоопределения ИРИ в УКВ-СВЧ-диапазонах частот благодаря реализации метода синтеза разностной апертуры в измерителе.
Заявляемые объекты поясняются чертежами, на которых показаны:
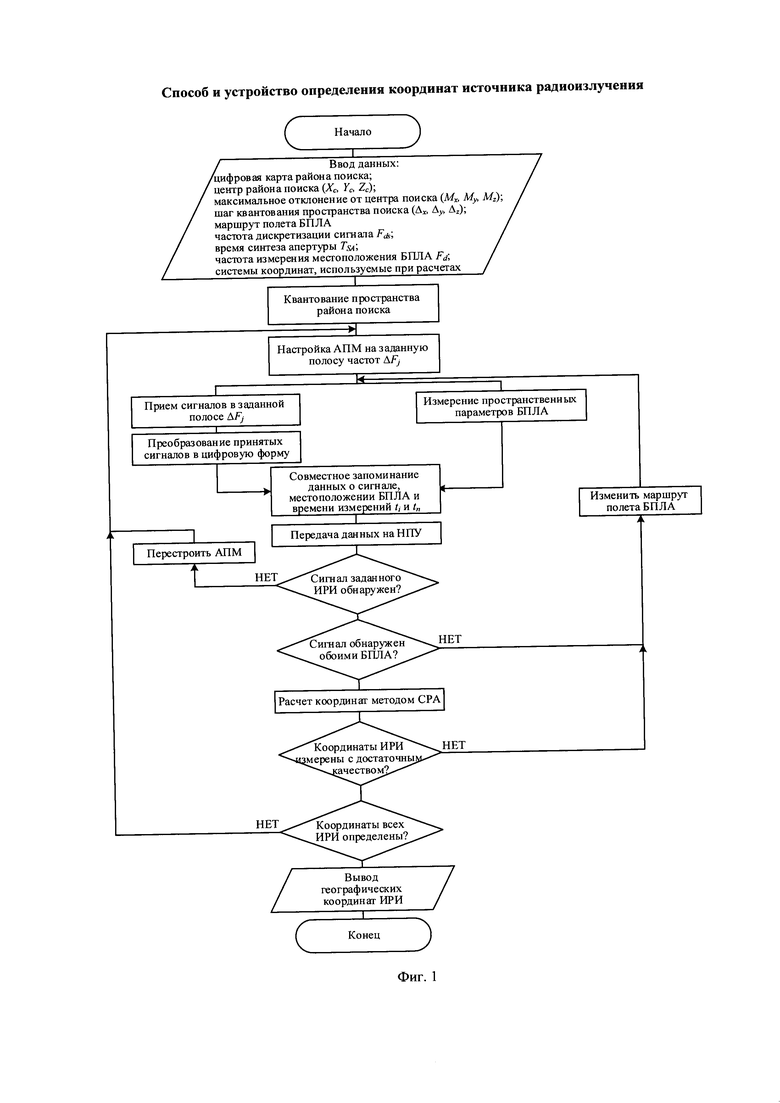
на фиг. 1 - обобщенный алгоритм определения координат источника радиоизлучения;
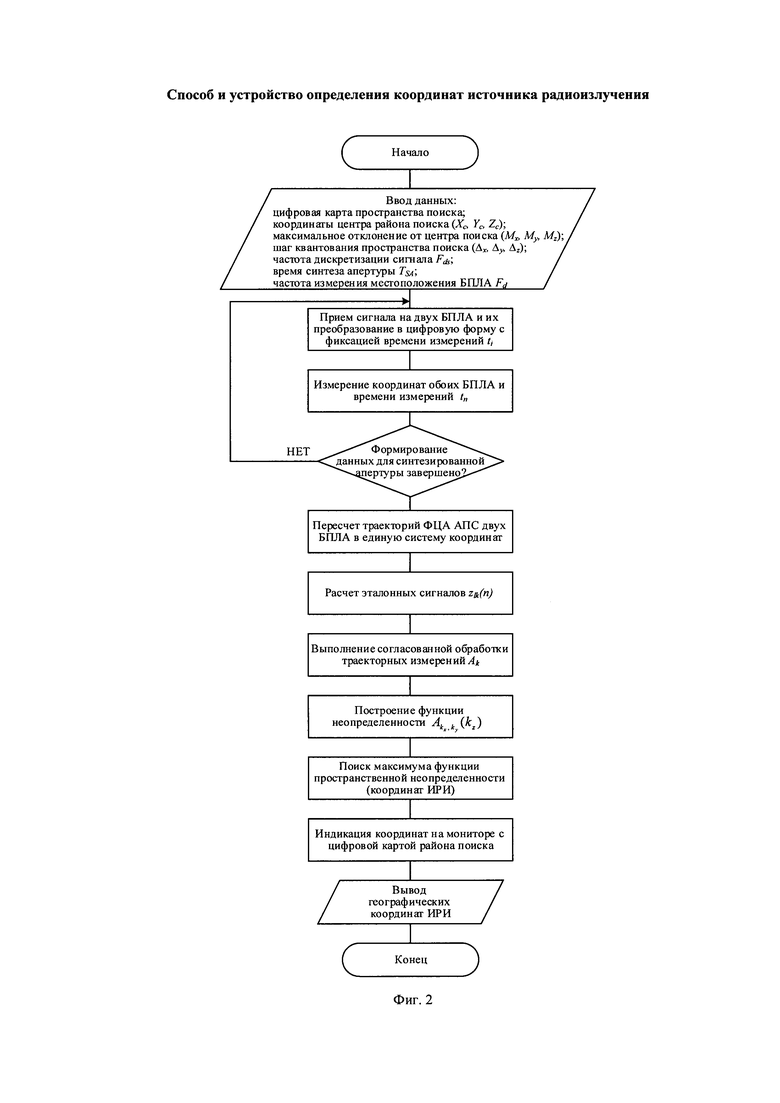
на фиг. 2 - обобщенный алгоритм синтеза разностной апертуры;
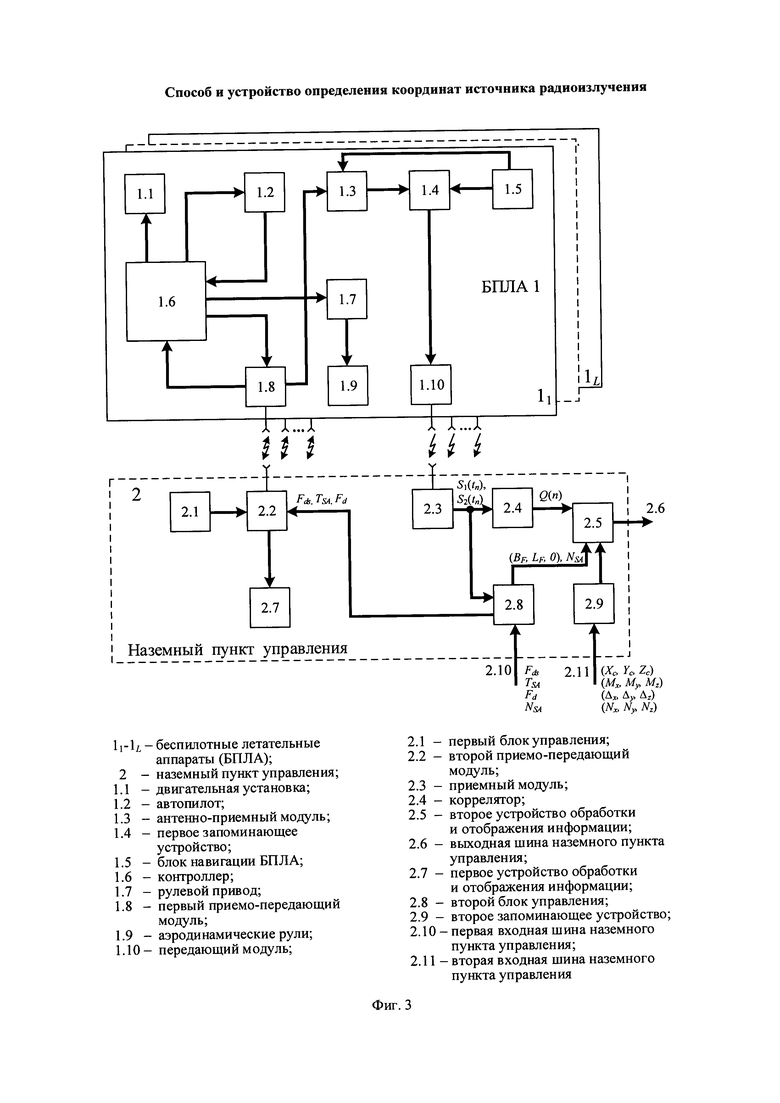
на фиг. 3 - обобщенная структурная схема устройства определения координат источника радиоизлучения;
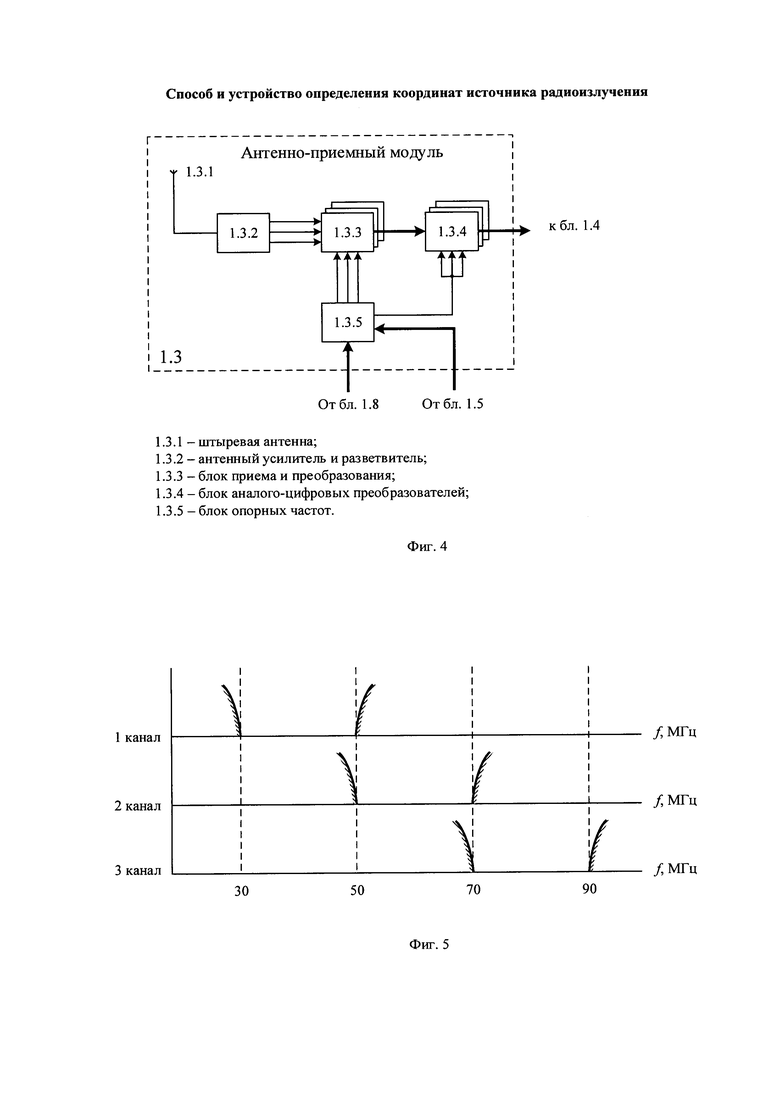
на фиг. 4 - структурная схема антенно-приемного модуля;
на фиг. 5 - порядок настройки приемных трактов АПМ;
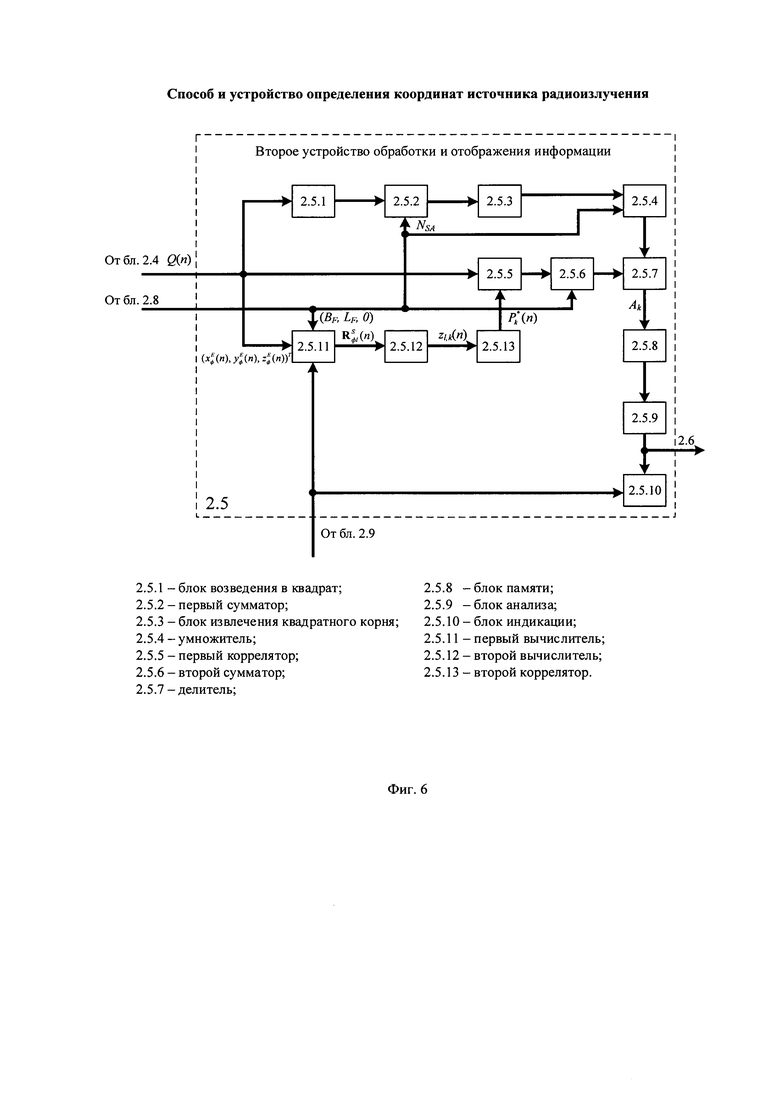
на фиг. 6 - структурная схема второго устройства обработки и отображения информации;
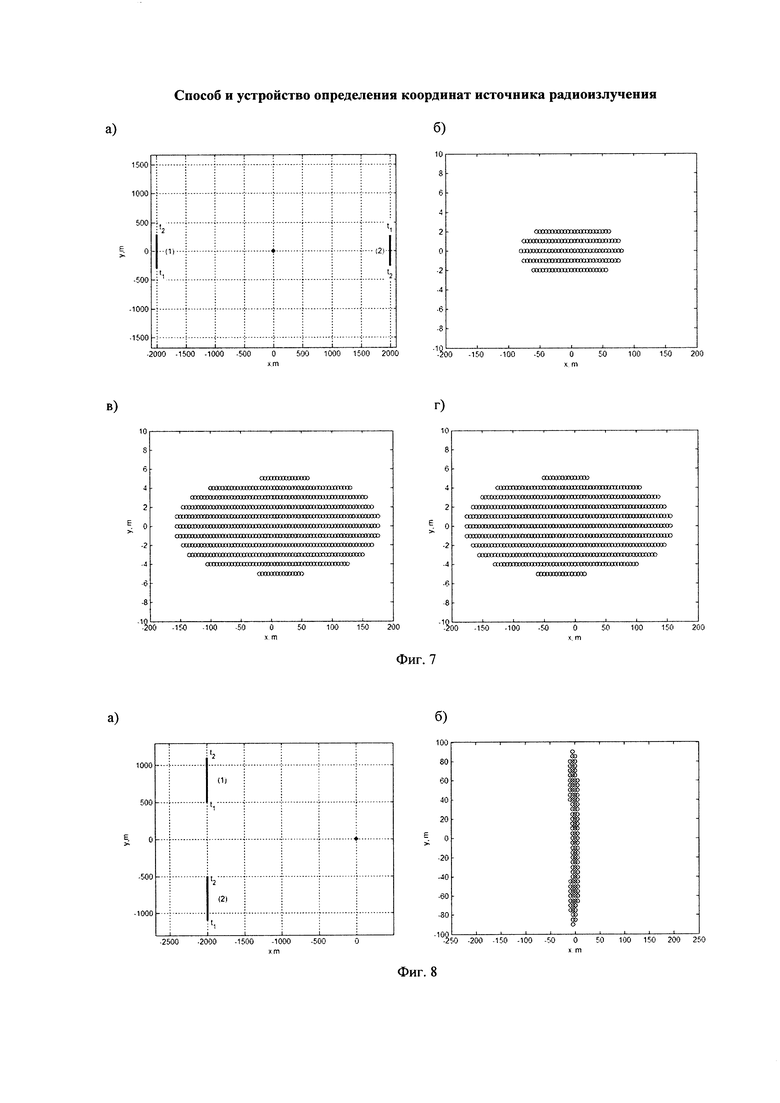
на фиг. 7 - результаты первого варианта формирования функции неопределенности при синтезе разностной апертуры:
а) траектории фазовых центров антенн 1 (ОП) и 2 (ВП) на интервале времени t1-t2;
б) сечение ФН на уровне 0,7 при синтезе разностной апертуры;
в) сечение ФН при синтезе апертуры для траектории 1 (ОП);
г) сечение ФР при синтезе апертуры для траектории 2 (ВП);
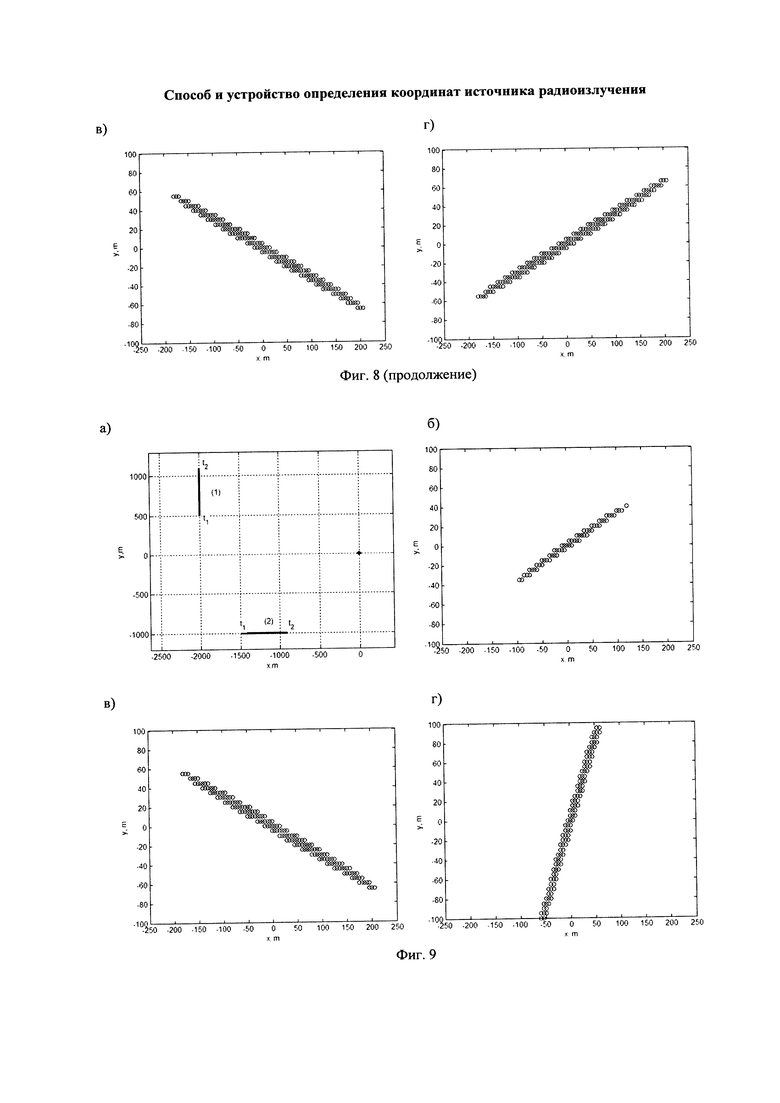
на фиг. 8 - результаты второго варианта формирования функции неопределенности при синтезе разностной апертуры:
а) траектории фазовых центров антенн 1 (ОП) и 2 (ВП) на интервале времени t1-t2;
б) сечение ФН на уровне 0,7 при синтезе разностной апертуры;
в) сечение ФН при синтезе апертуры для траектории 1 (ОП);
г) сечение ФН при синтезе апертуры для траектории 2 (ВП);
на фиг. 9 - результаты третьего варианта формирования функции неопределенности при синтезе разностной апертуры:
а) траектории фазовых центров антенн ОП и ВП на интервале времени t1-t2;
б) сечение ФН на уровне 0,7 при синтезе разностной апертуры;
в) сечение ФН при синтезе апертуры для траектории 1 (ОП);
г) сечение ФН при синтезе апертуры для траектории 2 (ВП);
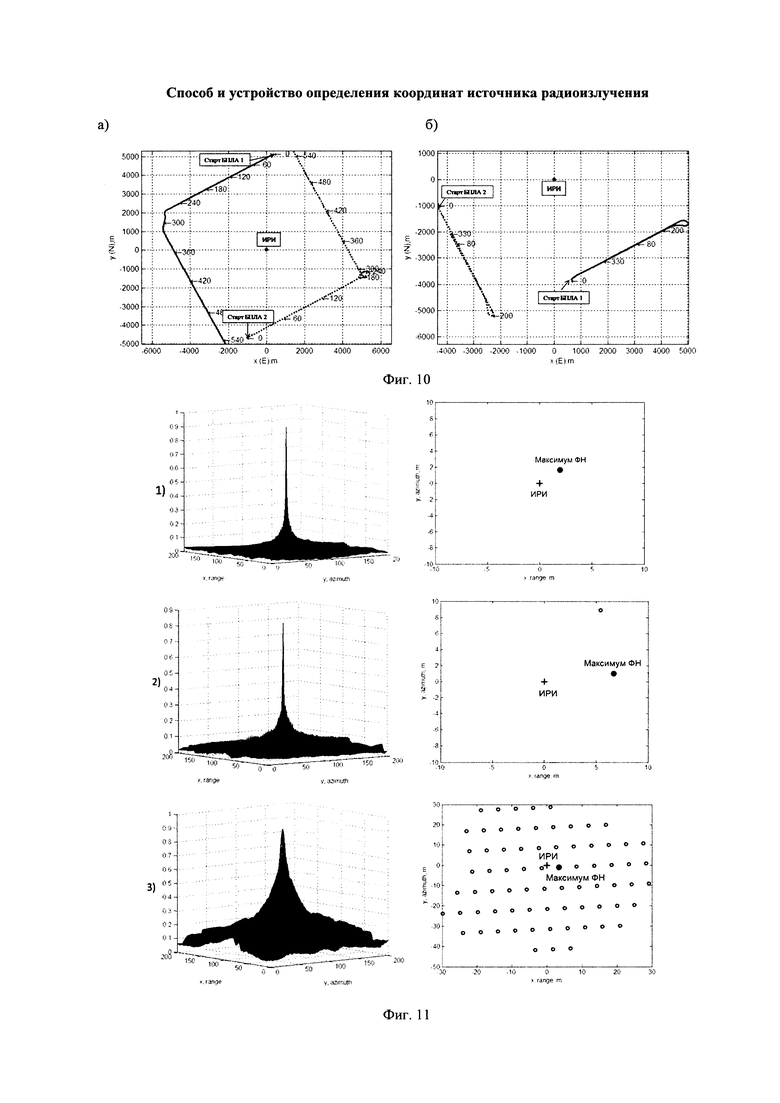
на фиг. 10 - траектории движения БПЛА относительно ИРИ в фиксированной системе координат:
а) для экспериментов №№1-6;
б) для эксперимента №7;
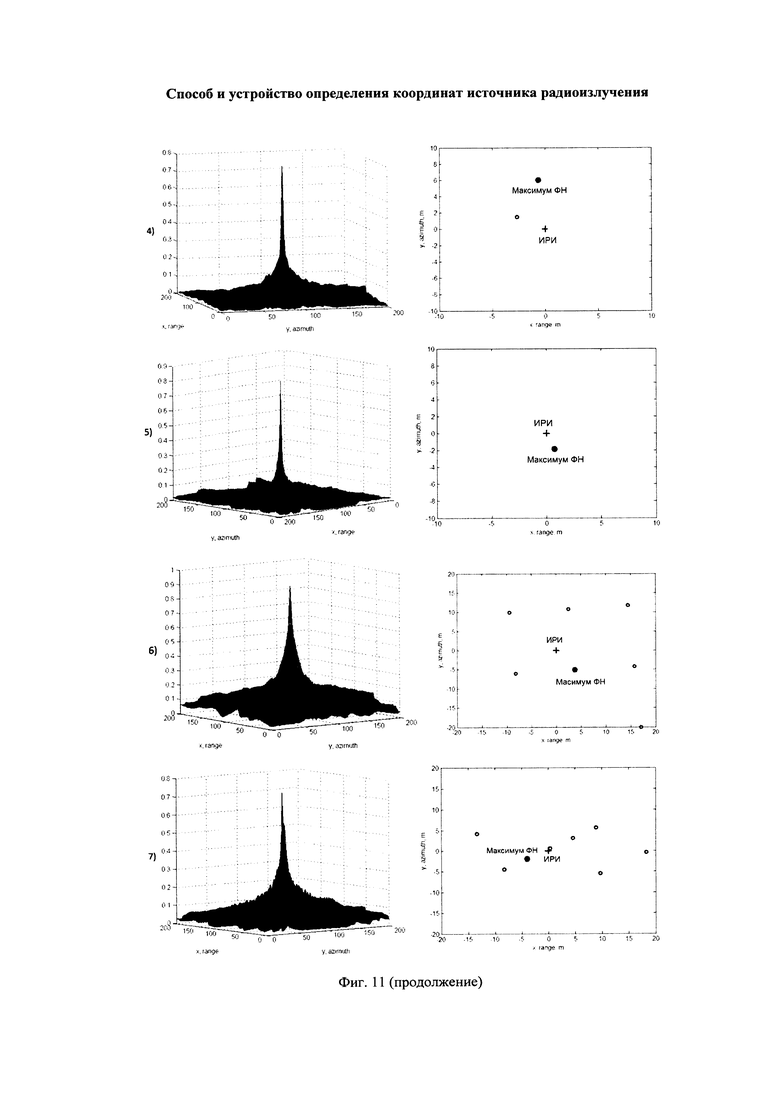
на фиг. 11 (1-7) - суммарные функции неопределенности (шаг по х - 10 м, шаг по y - 5 м) и их элементы разрешения в ФСК для элементов 1-7 соответственно;
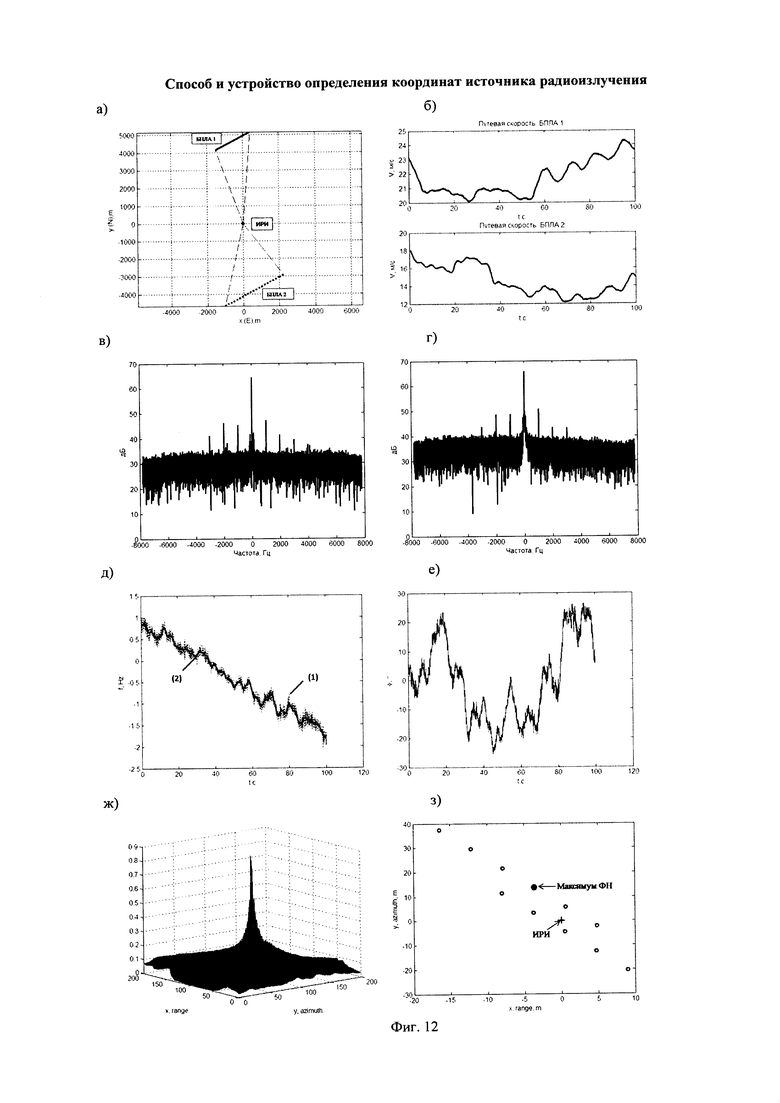
на фиг. 12 - результаты синтеза апертуры для несущей частоты 30,5 МГц:
а) траектории движения БПЛА 1 и 2 относительно ИРИ в ФСК;
б) путевые скорости БПЛА;
в) спектр сигнала, принятого на борту БПЛА 1;
г) спектр сигнала, принятого на борту БПЛА 2;
д) частота принятого разностного траекторного сигнала (1) и частота эталонного разностного траекторного сигнала (2);
е) разность фаз между эталонным и принятым разностным траекторным сигналом;
ж) функция неопределенности (шаг по х - 10 м, шаг по y - 5 м);
з) элемент разрешения по ФСК;
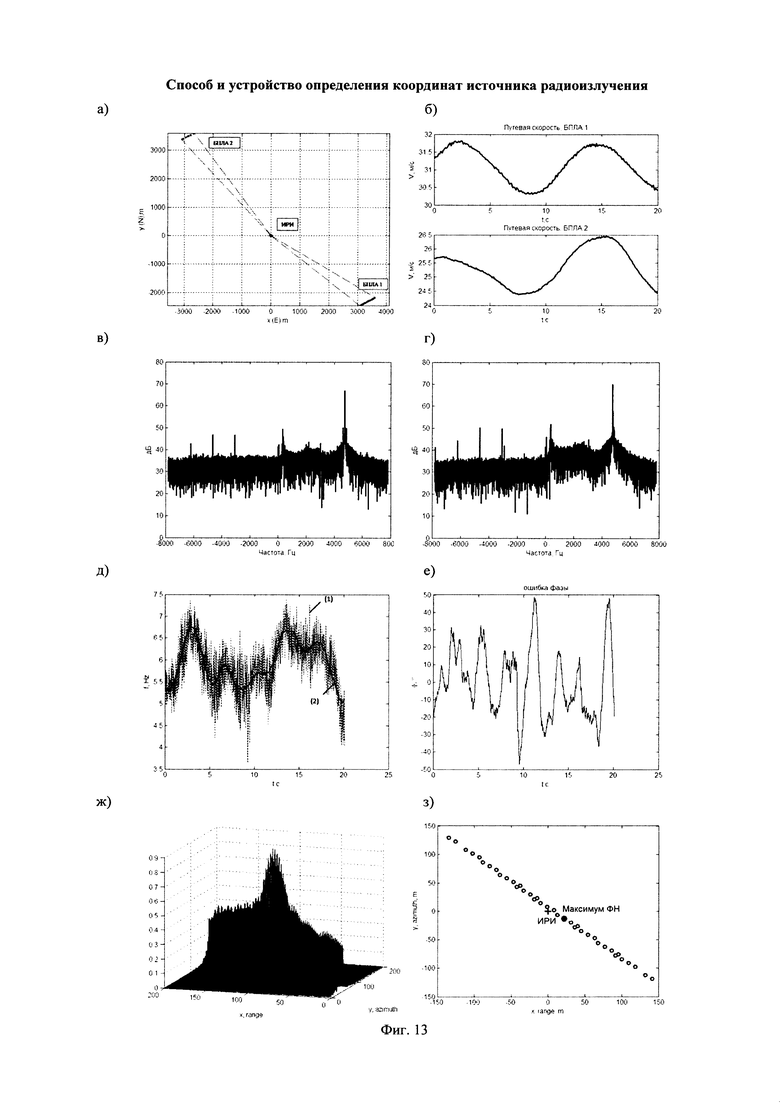
на фиг. 13 - результаты синтеза апертуры для несущей частоты 199,5 МГц:
а) траектория движения БПЛА относительно ИРИ в ФСК;
б) путевые скорости БПЛА;
в) спектр сигнала, принятого на борту БПЛА 1;
г) спектр сигнала, принятого на борту БПЛА 2;
д) частота принятого разностного траекторного сигнала (1) и частота эталонного разностного траекторного сигнала (2);
е) разность фаз между эталонным и принятым траекторными сигналами;
ж) функция неопределенности (шаг по х=10 м, шаг по y=5 м);
з) элемент разрешения в ФСК;
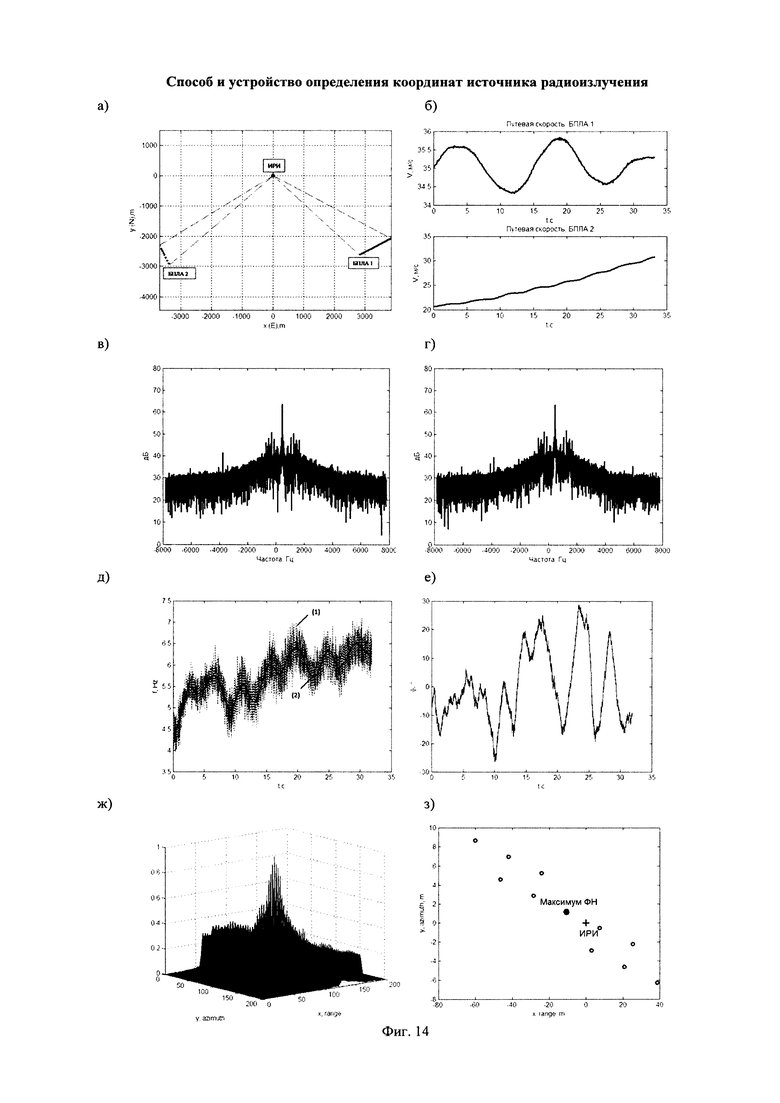
на фиг. 14 - результаты синтеза апертуры для несущей частоты 146 МГц:
а) траектория движения БПЛА относительно ИРИ в ФСК;
б) путевая скорость БПЛА;
в) спектр сигнала, принятого на борту БПЛА 1;
г) спектр сигнала, принятого на борту БПЛА 2;
д) частота принятого разностного траекторного сигнала (1) и частота эталонного разностного траекторного сигнала 2;
е) разность фаз между эталонным и принятым разностными траекторными сигналами;
ж) функция неопределенности (шаг по х=10 м, шаг по y=5 м);
з) элемент разрешения в ФСК.
Сущность изобретений состоит в следующем. В рамках предложенных материалов акцент сделан на определение местоположения ИРИ в УКВ-СВЧ-диапазонах частот (30-300 МГц) с использованием небольших летательных аппаратов, что является экономически обоснованным.
В настоящее время известны реализации фазоразностного и разностно-дальномерно-доплеровского способов определения координат, базирующихся на небольших беспилотных летательных аппаратах (БПЛА) (см. Рембовский A.M. и др. Радиомониторинг - задачи, методы, средства / Под ред. A.M. Рембовского. - М.: Горячая линия-Телеком, 2010. - 624 с. ). Фазоразностный способ предполагает использование на борту БПЛА не менее трех АПМ, что ограничивает его использование в метровом диапазоне волн из-за габаритных и весовых характеристик. Применение разностно-дальномерно-доплеровского способа ограничено классом широкополосных сигналов и сложностью реализации.
Для названных исходных данных предпочтительным является использование способа пассивного синтеза апертуры (ПСА), реализуемого перемещением одного АПМ в пространстве для построения виртуальной апертуры большого размера. При этом в отличие от радиолокатора с синтезированной апертурой при пассивном синтезе отсутствует опорный радиосигнал и используется одно радиоприемное устройство (см. Кондратенков Г.С. Радиовидение. Радиолокационные системы дистанционного зондирования Земли / Г.С. Кондратенков, А.Ю. Фролов. - М.: Радиотехника, 2005. - 368 с. ). Этот способ относится к одноканальным корреляционным интерферометрическим измерителям, где физическое разделение каналов заменено временным.
В предлагаемых способе и устройстве для повышения точности определения координат предложено использование пассивного синтеза разностной апертуры, позволяющего устранить отстройку по частоте между АПМ и передатчиком ИРИ, влияние нестабильности фазы передатчика, а также учесть модуляцию сигнала ИРИ. Дополнительно повышение точности измерений достигается оптимизацией маршрутов полета носителей ОП и ВП относительно ИРИ.
Реализация способа достигается следующей последовательностью действий. С помощью АПМ ОП и ВП, размещенных на подвижных ЛПС (БПЛА) (фиг. 1, 2), осуществляют прием сигнала ИРИ. При этом на каждом из ЛПС размещают по одному АПМ. Принятый на интервале времени [t0; tc] высокочастотный сигнал преобразуют в электрический сигнал промежуточной частоты, дискретизируют с частотой Fds и квантуют его, формируют две последовательности отсчетов квадратурных составляющих на нулевой частоте. Всего получают ISA=TSA·Fds комплексных отсчетов радиосигнала ИРИ за время синтеза апертуры TSA, TSA=tc-t0, измеренных в моменты времени ti, t=i·Δt, t=0, 1, …, TSA-1, Δt=1/FSA.
Одновременно в интервале времени [t0; tc] осуществляют определение местоположения фазовых центров антенн (ФЦА) АПМ. Частоту измерений Fd выбирают из условия получения однозначных результатов пеленгования. Для этого расстояние между отдельными элементами апертуры должно составлять менее половины длины принимаемой радиоволны. В качестве системы координат может быть использована земная гринвичская геоцентрическая система координат (Е) (см. Wang W.Q. Multi-Antennas Synthetic Aperture Radar, Boca Raton, FL; CRC Press, Taylor & Francis, cop., 2013. - 438 p.), или локальная (L) для данного носителя навигационная система координат (ЛСК). Центр последней совпадает с координатами ФЦА в начальный t0 момент синтеза. Ось Y совпадает с вектором путевой скорости носителя в момент времени t0, ось Z - по геофизической вертикали вверх, а ось X дополняет систему до правой. В результате имеем Nsa=TSA·Fd отсчетов траектории ФЦА за время синтеза апертуры, измеренных в моменты времени tn, tn=n/Fd,  причем Fds>Fd, ISA>NSA.
причем Fds>Fd, ISA>NSA.
Как правило, навигационные системы носителей измеряют местоположение в земной гринвичской геоцентрической системе координат (ЗСК), а в ЛСК удобно анализировать свойства антенны с синтезированной апертурой. Для пересчета координат ФЦА между ЗСК и ЛСК, примем, что ось Z ЗСК направлена в сторону опорного меридиана, ось Y направлена вдоль оси вращения Земли, ось X дополняет систему до правой, и введем матрицу

где сХ=cos(X), sX=sin(X). Тогда матрица направляющих косинусов для перехода из ЛСК в ЗСК примет вид:

где BL, Ll - геодезические координаты начала ЛСК, Ψν - путевой угол в момент времени t0.
Известно, что для синфазного сложения радиосигналов в элементах антенной системы допустимой является ошибка положения точек апертуры относительно заданного порядка λ/8, где λ - длина радиоволны, что соответствует ошибке измерения фазы сигнала π/4. В предлагаемом способе необходимо различать ошибки в знании начального положения ФЦА в момент времени t0 и ошибки его положения относительно начального положения в течение времени синтеза TSA.
Ошибка в знании начального положения ФЦА приводит к равной ошибке определения местоположения ИРИ, но не влияет на когерентное накопление радиосигнала в апертуре (см. Кондратенков Г.С. Радиовидение. Радиолокационные системы дистанционного зондирования Земли / Г.С. Кондратенков, А.Ю. Фролов. - М.: Радиотехника, 2005. - 368 с. ). Требования к знанию начального положения ФЦА определяют исходя из условий обеспечения требуемой точности оценки пространственных параметров сигнала. Ошибка, представляющая собой линейный набег координат ФЦА за время синтеза апертуры, вызванная погрешностями в оценке скорости смещения, повлечет за собой смещение максимума функции неопределенности без ухудшения разрешающей способности измерителя (см. там же). Поэтому требования к частоте измерения местоположения ФЦА вытекают из условий обеспечения требуемой точности пеленгования.
Таким образом, в предлагаемом способе для обеспечения когерентного накопления радиосигнала в апертуре на интервале синтеза TSA для задачи пассивной локации в качестве допустимой принимается точность считывания координат ФЦА относительно линейного набега в пределах λ±/8.
Измеренные значения квадратурных составляющих сигнала, принятого на ОП и ВП, совместно с данными о пространственном положении ФЦА АПМ и времени их измерения ti и tn соответственно по соответствующим каналам связи передают на НПУ. Поступившие на НПУ данные о сигнале совместно запоминают (значения квадратурных составляющих сигнала соответствующего пункта и время их измерения ti, а также координаты фазового центра антенны АПМ соответствующего пункта и время их измерения tn).
Дискретные отсчеты квадратурных составляющих огибающих сигнала, принятые на интервале синтезирования l-м АПМ от неподвижного источника с длиной волны λ могут быть представлены в виде

где  Ul(i) - амплитуда сигнала, rl(i) - расстояние от ИРИ до траектории перемещение ФЦА l-го АПМ в момент времени i,
Ul(i) - амплитуда сигнала, rl(i) - расстояние от ИРИ до траектории перемещение ФЦА l-го АПМ в момент времени i,  - отстройка между l-м АПМ и ИРИ, Δt=1/Fds - шаг по времени, φm(i) - фазовая модуляция сигнала ИРИ, δφИРИ(i) - нестабильность фазы передающего модуля ИРИ, δφl(i) - нестабильность фазы l-го АПМ, φol - постоянный фазовый сдвиг для l-го АПМ. Из выражения (3) следует, что полезной информацией для определения местоположения ИРИ является составляющая фазы, вызванная изменением расстояния от ИРИ до АПМ. Для выделения полезной информации в предлагаемом способе предлагается выполнить перемножение сигналов, принятых разными АПМ:
- отстройка между l-м АПМ и ИРИ, Δt=1/Fds - шаг по времени, φm(i) - фазовая модуляция сигнала ИРИ, δφИРИ(i) - нестабильность фазы передающего модуля ИРИ, δφl(i) - нестабильность фазы l-го АПМ, φol - постоянный фазовый сдвиг для l-го АПМ. Из выражения (3) следует, что полезной информацией для определения местоположения ИРИ является составляющая фазы, вызванная изменением расстояния от ИРИ до АПМ. Для выделения полезной информации в предлагаемом способе предлагается выполнить перемножение сигналов, принятых разными АПМ:

где S1(i) - сигнал, принятый от ИРИ на первом носителе ОП,  - комплексно сопряженный сигнал, принятый от ИРИ на втором носителе ВП.
- комплексно сопряженный сигнал, принятый от ИРИ на втором носителе ВП.
В выражении (4) сделано допущение, что можно пренебречь величиной задержки между сигналами S1(i) и S2(i). Это справедливо при выполнении условия:  , где
, где  - полоса принимаемого сигнала, с - скорость света. Например, для полосы
- полоса принимаемого сигнала, с - скорость света. Например, для полосы  разница расстояний от носителей до ИРИ должна быть меньше 15 км. Невыполнение названного условия приводит к необходимости учета задержки между сигналами S1(t) и S2(t).
разница расстояний от носителей до ИРИ должна быть меньше 15 км. Невыполнение названного условия приводит к необходимости учета задержки между сигналами S1(t) и S2(t).
Выражение (4) для результирующего сигнала S(i) имеет вид:

где 
 - отстройка по частоте между первым и вторым АПМ, φ0 - постоянный фазовый сдвиг.
- отстройка по частоте между первым и вторым АПМ, φ0 - постоянный фазовый сдвиг.
Из выражения (5) видно, что операция (4) устраняет неизвестную отстройку по частоте ИРИ, нестабильность фазы в передающем тракте ИРИ, а также фазовую модуляцию радиосигнала. Синхронизацию приемников ОП и ВП осуществляют с помощью секундных меток времени от навигационного спутникового приемника, точность которых составляет 50 нс. Последние используют в совокупности с высокостабильными генераторами, подстраиваемыми по секундной метке времени.
Результирующий сигнал S(t) обладает меньшей полосой частот, чем исходные сигналы Sl(i), принятые АПМ. Полезная информация заключена в составляющей фазы сигнала  из чего следует, что полоса полезного сигнала определяется диапазоном доплеровских частот, присутствующих в траекторном сигнале. Поэтому частота дискретизации результирующего сигнала (4) может быть понижена до значения Fd.
из чего следует, что полоса полезного сигнала определяется диапазоном доплеровских частот, присутствующих в траекторном сигнале. Поэтому частота дискретизации результирующего сигнала (4) может быть понижена до значения Fd.
Под разностным траекторным сигналом в данном случае понимают отсчеты результирующего сигнала (4), взятые в моменты времени tn,
Q(n)=S(tn), tn=n/Fd, 
На следующем этапе задают систему координат, в которой будет синтезироваться разностная апертура (S). В качестве последней может быть выбрана фиксированная (F) относительно земли декартова система координат (ФСК), местоположение которой задает оператор. При этом ось Y направлена на север по касательной к географическому меридиану, ось Z - по геодезической вертикали вверх, а ось X дополняет систему до правой. В этом случае с учетом (1) матрица направляющих косинусов для перехода от ФСК к ЗСК имеет вид:

где BF, LF - геодезические координаты начала ФСК. В качестве альтернативы может быть выбрана одна из ЛСК для используемых носителей. Матрица направляющих конусов для перехода из ЛСК в ФСК имеет вид

Так как система координат может быть задана на первом (предварительном) этапе работы, то в процессе работы задают лишь координаты ее начала.
Далее осуществляют пересчет траекторий двух ФЦА в единую систему координат.
Если траектории ФЦА измеряют в ЗСК, а в качестве системы координат для синтеза разностной апертуры (5) выбрана ФСК (S=F), то пересчет выполняют в соответствии с выражением (6)

где l - номер носителя,  - координаты l-го ФЦА в ЗСК в момент времени n,
- координаты l-го ФЦА в ЗСК в момент времени n,  - координаты центра системы координат для синтеза в ЗСК.
- координаты центра системы координат для синтеза в ЗСК.
На следующем этапе задают рабочую зону для поиска местоположения ИРИ. Данная операция в ряде случаев (при наличии априорной информации о ИРИ) может выполняться одной из первых на подготовительном этапе для повышения быстродействия предлагаемого способа (аналогично известным решениям, предложенным в Пат. РФ №№2296341, 2327186 и др.). В общем случае и для удобства рассмотрения задание используемой в измерениях системы координат и рабочей зоны поиска ИРИ осуществляет оператор совместно. С этой целью координаты центра рабочей зоны поиска (Хс,, Yc, Zc), максимальное отклонение от центра по трем осям выбранной системы координат (Мх, My, Mz), шаг квантования пространства по каждой из осей (Δх, Δy, Δz) задают из условия обеспечения требуемой точности и разрешающей способности измерителя (пеленгатора). При этом число градаций по осям координат составляет
 где
где  - операция округления до целого.
- операция округления до целого.
Точки пространства в пределах рабочей зоны в соответствии с выбранными шагами дискретизации по каждой из осей нумеруют: kx=0, 1, …, Nx по оси X, ky=0, 1, …, Ny по оси Y, kz=0, 1, …, Nz по оси Z. При этом (kx, ky, kz)-тая точка имеет координаты xk=Δх·Δkx+хс-Мх, yk=Δy·ky+yc-My, zk=Δz·kz+zc-Mz. Всего получается К=Nx·Ny·Nz элементов разрешения, при этом k-й элемент разрешения задается трехмерным вектором

Шаг квантования пространства по каждой из осей должен быть меньше разрешающей способности измерителя по соответствующей оси.
Известно, что разрешение вдоль линии движения носителя (по азимуту) и при условии прохождения радиосигнала в одном направлении определяется выражением (см. Кондратенков Г.С. Радиовидение. Радиолокационные системы дистанционного зондирования Земли / Г.С. Кондратенков, А.Ю. Фролов. - М: Радиотехника, 2005. - 368 с. )

где Rн - наклонная дальность от носителя до ИРИ, d - размер синтезированной апертуры, θн - угол наблюдения ИРИ. Очевидно, что разрешение зависит от расстояния между носителем и ИРИ, а так же от угла наблюдения. Минимально достижимое разрешение по одной из координат для апертуры, синтезированной на l-м носителе, в пределах рабочей зоны определяет как
где  - минимальная наклонная дальность от l-го носителя до ИРИ.
- минимальная наклонная дальность от l-го носителя до ИРИ.
Предусматривая возможность двукратного улучшения разрешения в случае синтеза разностной апертуры для произвольной траектории полета l-го носителя шаг квантования пространства по горизонтальным осям может быть установлен

На следующем этапе способа формируют опорные (эталонные) сигналы для всех К элементов разрешения с заданной длиной волны λ. Опорный (эталонный) траекторный сигнал от монохроматического стационарного источника с длиной волны λ расположенного в k-м элементе разрешения с координатами  определяется как
определяется как

где  - координаты l-го ФЦА в системе координат (S) в момент времени n. Опорный (эталонный) разностный траекторный сигнал для k-го элемента разрешения из совокупности К находят из выражения
- координаты l-го ФЦА в системе координат (S) в момент времени n. Опорный (эталонный) разностный траекторный сигнал для k-го элемента разрешения из совокупности К находят из выражения

Далее осуществляют обработку траекторного сигнала. Для каждого k-го элемента разрешения вычисляют характеризующую его величину:

На основании полученных значений Ak приступают к построению пространственного изображения.
Совокупность величин Ak представляет собой функцию пространственной неопределенности (ФН), которая характеризует рассогласование принятого разностного траекторного сигнала от ИРИ и опорного (эталонного) разностного траекторного сигнала, рассчитанного при известных траекториях движения задействованных ФЦА и известных координатах ИРИ. Для каждой точки пространства вдоль вертикальной оси zk=Δz·kz+zc-Mz, kz=0, 1, …, Nz строят пространственное изображение ФН на плоскости, проходящей через zk. Данную двумерную ФН обозначим 
На завершающем этапе приступают к обработке ФН, которую выполняют в два этапа. На первом из них выбирают значение  и соответствующее ему
и соответствующее ему  при котором двумерная ФН обладает хорошим разрешением и наибольшей величиной. На втором этапе находят местоположение ИРИ путем поиска элемента разрешения с наибольшей величиной AK
при котором двумерная ФН обладает хорошим разрешением и наибольшей величиной. На втором этапе находят местоположение ИРИ путем поиска элемента разрешения с наибольшей величиной AK

В случае плохого разрешения по одной из горизонтальных координат (х, y) местоположение ИРИ можно зафиксировать двумя способами. Построить линию, проходящую по гребню ФН, т.е. получить направление на ИРИ на плоскости (пеленг ИРИ). В этом случае нахождение нескольких пеленгов позволяет определить местоположение ИРИ как точку их пересечения. Либо сложить (наложить) несколько ФН, полученных на разных траекториях, и определить местоположения ИРИ в соответствии с (13).
Устройство определения координат источника радиоизлучения (см. фиг. 3), содержит два и более идентичных БПЛА 11-1m и наземный пункт управления 2, причем каждый БПЛА 11-1m выполнен содержащим последовательно соединенные контроллер 1.6, рулевой привод 1.7 и аэродинамические рули 1.9, автопилот 1.2, группа информационных входов которого соединена с второй группой информационных выходов контроллера 1.6, первая группа информационных входов которого соединена с группой информационных выходов автопилота 1.2, двигательную установку 1.1, группа информационных входов которой соединена с третьей группой информационных выходов контроллера 1.6, первый L-канальный приемопередающий модуль 1.8, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера 1.6, вторая группа информационных входов которого соединена с первой группой информационных выходов первого приемо-передающего модуля 1.8, последовательно соединенные антенно-приемныймодуль 1.3., первое запоминающее устройство 1.4 и передающий модуль 1.10, блок навигации БПЛА 1.5, группа информационных выходов которого соединена со второй группой информационных входов первого запоминающего устройства 1.4, а группа входов управления антенно-приемного модуля 1.3 соединена с второй группой информационных выходов первого приемо-передающего модуля 1.8, а наземный пункт управления 2 выполнен содержащим последовательно соединенные первый блок управления 2.1, второй L-канальный приемопередающий модуль 2.2 и первое устройство обработки и отображения информации 2.7, последовательно соединенные L-канальный приемный модуль 2.3, второй блок управления 2.8 и второе устройство обработки и отображения информации 2.5, группа информационных выходов которого является выходной шиной 2.6 наземного пункта управления 2, коррелятор 2.4, группа информационных выходов которого соединена со второй группой информационных входов второго устройства обработки и отображения информации 2.5, а группа информационных входов объединена с первой группой входов второго блока управления 2.8, вторая группа выходов которого соединена со второй группой информационных входов второго приемо-передающего модуля 2.2, второе запоминающее устройство 2.9, группа информационных входов которого является второй установочной шиной 2.11 наземного пункта управления 2, а группа информационных выходов соединена с третьей группой входов второго устройства обработки и отображения информации 2.5, а вторая группа информационных входов 2.10 второго блока управления 2.8 является первой установочной шиной наземного пункта управления 2.
Заявляемое устройство определения координат источника радиоизлучения работает следующим образом (см. фиг. 2 и 3).
На подготовительном этапе по первой входной шине 2.10 наземного пункта управления 2 задают диапазон рабочих частот ΔF и маршруты полета БПЛА 11 и 12, значения Fds и Fd, Tds, Tn. По второй входной шине 2.11 задают цифровую карту района контроля, координаты центра зоны контроля (Хс, Yc, Zc), максимальное отключение от центра зоны контроля по трем осям (Мх, My, Mz), шаг квантования пространства по каждой из осей (Δx, Δy, Δz) из условия обеспечения требуемой точности и разрешения пеленгатора, число градаций по осям координат  где
где  - операция округления до целого.
- операция округления до целого.
Точки пространства в пределах заданной зоны контроля в соответствии с выбранными шагами дискретизации по каждой из осей нумеруют: kx=0, 1, …, Nx по оси X, ky=0, 1, …, Ny по оси Y, kz=0, 1, …, Nz по оси Z. При этом (kx, ky, kz)-я точка имеет координаты: xk=Δх·kx+Хс-Мх; yk=Δy·ky+Yc-My, zk=Δz·kz+Zc-Mz. Всего получается К=Nx·Ny·Nz элементов разрешения, при этом K-й элемент разрешения задается трехмерным вектором  k=0, 1, …К-1.
k=0, 1, …К-1.
Названные величины записываются во второе запоминающее устройство 2.9, представляющее собой буферную память. В процессе работы заявляемого устройства названные величины могут быть откорректированы.
Квантование пространства зоны контроля и его описание может быть также выполнено другим известным способом, подробно рассмотренным в пат. РФ №№2283505, 2327186.
Управление взлетом, полетом и посадкой БПЛА 11 и 12 осуществляют с первого автоматизированного рабочего места наземного пункта управления 2, состоящего из первого блока управления 2.1, второго приемопередающего модуля 2.2 и первого устройства обработки и отображения информации 2.7. Данную операцию осуществляют по первому низкоскоростному дуплексному радиоканалу на частотах 0,9-0,92 ГГц с использованием модулей 1.8 и 2.2. Маршруты полета БПЛА 11 и 12 определяются исходя их заданной зоны контроля в соответствии с рекомендациями, сформированными выше. Сигналы управления блока 2.1 по аналогии с прототипом, через модули 2.2 и 1.8l поступают на вход контроллера 1.6l, l=1,2, где они преобразуются к виду, необходимому для управления двигательной установкой 1.1. Далее с выхода блока 1.6l они следуют на группу входов двигательной установки 1.1l и через рулевой привод 1.7l изменяют углы настройки крыльев, конфигурацию их поверхности и другие параметры управления движением БПЛА 1l. Автопилот 1.2l обеспечивает необходимую стабилизацию положения БПЛА 1l в пространстве на заданной блоком 2.1 высоте, парирование ветровых возмущений, движение по заданному маршруту и т.д. Воздействие автопилота 1.2l на двигательную установку 1.1l и через рулевой привод 1.7l - на аэродинамические рули 1.9l осуществляется через контроллер 1.6l. Последний формирует по исходным данным блока 1.2l необходимые команды управления функциональным узлам БПЛА. Следует отметить, что первое автоматизированное рабочее место в состоянии одновременно управлять полетом до четырех БПЛА типа «Орлан-10».
Непосредственное участие в измерении координат источников радиоизлучений на борту БПЛА 11 и 12 принимают антенно-приемный модуль 1.3l, первое запоминающее устройство 1.4l, блок навигации БПЛА 1.5l и передающий модуль 1.10l, а в наземном пункте управления 2 - второе автоматизированное рабочее место в составе приемного модуля 2.3, коррелятора 2.4, второго устройства обработки и отображения информацией 2.5, второго блока управления 2.8 и второго запоминающего устройства 2.9.
С помощью АПМ 1.31 и 1.32 ОП и ВП соответственно (см. фиг. 4), размещенных на БПЛА, осуществляют прием сигнала ИРИ. На каждом из носителей (например, Орлан-10) размещается по одному АПМ. Данное обстоятельство позволило резко сократить массогабаритные характеристики АПМ и потребляемую ими электроэнергию и как следствие - возможность их размещения на малых БПЛА.
Принятый антенным элементом (АЭ) блока 1.3l на интервале времени [t0; tc] высокочастотный сигнал преобразуют в электрический сигнал промежуточной частоты, дискретизируют с частотой Fds и квантуют его. В качестве АЭ используют штыревую антенну согласованной длины. В связи с тем, что рабочая полоса частот достаточно широка (30-300 МГц), потребовало дополнительное введение в модуль 1.3l антенного усилителя. Далее в блоке 1.3l формируют две последовательности отсчетов квадратурных составляющих на нулевой частоте. Всего получают Isa=TSA·Fds комплексных отсчетов радиосигнала ИРИ за время синтеза апертуры TSA, TSA=tc-t0, измеренных в моменты времени ti, t=iΔt, t=0, 1, …TSA-1, Δt=1/FSA. Измеренные значения квадратурных составляющих сигнала поступают на первую группу информационных входов совместно со значениями времени их получения ti. Здесь они попарно (Sl(ti) и ti) запоминаются.
Одновременно с помощью блока 1.5 в интервале времени [t0; tc] осуществляют определение местоположения фазовых центров антенн АПМ 1.3l в гринвичской (Е) геоцентрической системе координат. Здесь и далее под ФЦА будем понимать местоположение точки крепления АЭ к корпусу БПЛА. Частота измерений Fd выбирается из условия получения однозначных результатов пеленгования, а, следовательно, расстояние между отдельными элементами апертуры должно составлять менее половины длины принимаемого радиосигнала. Измеренные координаты БПЛА 1l и время их измерения совместно поступают на вторую группу информационных входов блока 1.4l, где осуществляется их запоминание. Следует отметить, что блок 1.4l выполняет функцию буферного запоминающего устройства. Две пары измеренных параметров (квадратурные составляющие сигнала и их время измерение, координаты местоположения БПЛА и время их измерения) поступают на группу информационных входов передающего модуля 1.10 и далее по высокоскоростному симплексному каналу на частотах 2-2,5 ГГц на второе АРМ НПУ 2. Реализация блока 1.5l по сравнению с аналогичным блоком прототипа существенно упрощается. Это связано с тем, что в заявляемом устройстве не востребована информация о угле сноса БПЛА 1l в силу того обстоятельства, что в качестве антенны блока 1.3l используется штырь с круговой диаграммой направленности.
Измеренные за время синтеза TSA значения оцениваемых параметров (Sl(ti), til и координаты БПЛА  с борта l-го БПЛА 1l через блок 2.3 поступают на соответствующую группу информационных входов коррелятора 2.4. Здесь
с борта l-го БПЛА 1l через блок 2.3 поступают на соответствующую группу информационных входов коррелятора 2.4. Здесь  и
и  - соответственно широта, долгота и высота l-го БПЛА в момент времени tn. Аналогичная информация на соответствую группу информационных входов блока 2.4 поступает с другого БПЛА 11+1. В функцию блока 2.4 входит выполнение операции (4). В результате устраняется неизвестная отстройка по частоте приемного тракта блока 1.3 и анализируемого ИРИ, нестабильность фазы в передающем тракте этого ИРИ, а также фазовая модуляция радиосигнала. Синхронная работа блоков 1.3l и 1.3l+1 осуществляется с помощью секундных меток времени, принимаемых блоками 1.5l и 1.5l+1. Последние дополнены высокостабильными генераторами, запускаемыми этими метками.
- соответственно широта, долгота и высота l-го БПЛА в момент времени tn. Аналогичная информация на соответствую группу информационных входов блока 2.4 поступает с другого БПЛА 11+1. В функцию блока 2.4 входит выполнение операции (4). В результате устраняется неизвестная отстройка по частоте приемного тракта блока 1.3 и анализируемого ИРИ, нестабильность фазы в передающем тракте этого ИРИ, а также фазовая модуляция радиосигнала. Синхронная работа блоков 1.3l и 1.3l+1 осуществляется с помощью секундных меток времени, принимаемых блоками 1.5l и 1.5l+1. Последние дополнены высокостабильными генераторами, запускаемыми этими метками.
Полученные результаты поступают на вторую группу входов второго устройства обработки и отображения информации 2.5 Одновременно значения квадратурных составляющих сигналов с обоих БПЛА 1l и 1l+1 поступают на соответствующие входы первой группы входов второго блока управления 2.8. В блоке 2.8 осуществляется анализ принятых квадратур сигналов (пороговая обработка) на предмет одновременного наличия сигналов с бортов обоих БПЛА. В случае принятия сигнала обоими модулями 1.3 и 1.3l+1 на выходе блока 2.8 формируется управляющий сигнал блоку 2.5 на реализацию синтеза разностной апертуры. В противном случае, когда прием сигнала обеспечивается только одним АПМ 1.3l, блок 2.8 сигнализирует о необходимости изменения маршрута полета соответствующего носителя (БПЛА).
В функции второго устройства обработки и отображения информации (см. фиг. 2 и 6) входит формирование синтезированной апертуры на основе Q(n) (4), вычисление сигналов эталонных траекторных сигналов в соответствие с (10) и (11), выполнение согласованной обработки траекторных сигналов (12), построение пространственного спектра с последующей двухэтапной его обработки с целью нахождения элемента разрешения с наибольшей величиной функции пространственной неопределенности  (13).
(13).
Результаты определения координат отражаются на мониторе блока 2.5 на фоне цифровой карты заданного района и одновременно в заданном формате поступают на выходную шину 2.6 НПУ 2. С помощью блока 2.8 осуществляется управление одновременной перестройкой приемных трактов АПМ 1.31 и 1.32.
Все функциональные элементы и блоки предполагаемого устройства широко освещены в литературе и серийно выпускаются.
В качестве БПЛА 11-1L целесообразно использовать серийно выпускаемый Обществом с ограниченной ответственностью «Специальный Технологический Центр», город Санкт-Петербург, БПЛА «Орлан-10» (см. http://bp-la.ru/bpla-orlan-10/). Масса полезной нагрузки БПЛА составляет 5 кг, способ старта - с разборной катапульты, приземление - на парашюте. Воздушная скорость БПЛА 90-150 км/ч, максимальная продолжительность полета - 16 часов, максимальная дальность-600 км, максимальная высота - 5 км.
Антенно-приемный модуль 1.3 предназначен для приема сигналов ИРИ в диапазоне частот 2-30-300 МГц, преобразования их на промежуточную частоту, например, 90 МГц, с последующим преобразованием принятых сигналов в цифровую форму (см. фиг. 4 и 5). Его реализация известна и трудностей не вызывает. Модуль 1.3 содержит последовательно соединенные штыревую антенну 1.3.1, антенный усилитель и разветвитель 1.3.2, блок приема и преобразования 1.3.3 и блока аналого-цифровых преобразователей 1.3.4, группа информационных выходов которого является группой информационных выходов антенно-приемного модуля 1.3, блок опорных частот 1.3.5, первая группа входов которого является входом управления антенно-приемного модуля 1.3, вторая группа входов является опорным входом антенно-приемного модуля 1.3, первый, второй и третий выходы блока 1.3.5 соединены с опорными входами соответствующих приемных каналов блока приема и преобразования 1.3.3, а четвертый выход соединен с опорными входами блока аналого-цифрового преобразователей.
Работа антенно-приемного модуля осуществляется следующим образом. Принимаемый антенной 1.3.1 сигнал усиливается в блоке 1.3.2 и через разветвитель поступает на входы трехканального блока приема и преобразования 1.3.3. Последний предназначен для одновременного приема радиосигналов в полосе 60 МГц, обеспечения предварительной селекции сигналов и преобразования их на промежуточную частоту, например, 90 МГц. Полоса  в 60 МГц обеспечивается компактной настройкой трех приемных каналов по 20 МГц каждый в соответствие с фиг. 5. Такую настройку каналов блока 1.3.3 обеспечивают опорные напряжения, формируемые блоком 1.3.5. Перестройка блока 1.3.3 в рабочей полосе ΔF (30-300 МГц) осуществляется также блоком 1.3.5 по командам второго блока управления 2.8. Синхронность перестройки АПМ 1.31 и 1.32 в полосе ΔF осуществляется по секундным меткам, поступающим на опорные входы модулей 1.3 (блоки 1.3.5).
в 60 МГц обеспечивается компактной настройкой трех приемных каналов по 20 МГц каждый в соответствие с фиг. 5. Такую настройку каналов блока 1.3.3 обеспечивают опорные напряжения, формируемые блоком 1.3.5. Перестройка блока 1.3.3 в рабочей полосе ΔF (30-300 МГц) осуществляется также блоком 1.3.5 по командам второго блока управления 2.8. Синхронность перестройки АПМ 1.31 и 1.32 в полосе ΔF осуществляется по секундным меткам, поступающим на опорные входы модулей 1.3 (блоки 1.3.5).
Принятые в блоке 1.3.3 и преобразованные сигналы с выходов приемных каналов поступают на соответствующие входы трехканального блока аналого-цифровых преобразователей 1.3.4. Здесь принятые сигналы раскладываются на квадратуры и оцифровываются. В результате на выходе модуля 1.3 формируется цифровой поток квадратур, принятых в полосе 60 МГц.
Реализация всех элементов модуля 1.3 известна и трудностей не вызывает. Блок приема и преобразования 1.3.3 предназначен для одновременного приема сигналов в широкой 60 МГц полосе частот и преобразование их на промежуточную частоту, например, 90 МГц. Его реализация известна и трудностей не вызывает (см. Фомин Н.Н., Буга Н.Н. и др. Радиоприемные устройства: Учебник для вузов. - 3-е изд., стереотип. - М.: Горячая линия-Телеком, 2007. - С. 520; Головин О.В. Радиоприемные устройства, - М.: Горячая линия - Телеком, 2004 г. ).
Блок аналого-цифровых преобразователей 1.3.4 может быть реализован на серийно выпускаемых фирмой ZETlab Studio изделиях (http://www.zetlab.ru/catalog/). Возможны и другие реализации блока 1.3.4 (см. «Профессиональное оборудование и технологии» http://www.protehnology.ru/page/about/).
Блок опорных частот 1.3.5 предназначен для формирования высокостабильного сигнала с частотой 120 МГц. Он содержит опорный генератор, обеспечивающий формирование высокостабильного аналогового сигнала с частотой 10 МГц (выполняется на основе DDS-синтезатора).
С выхода синтезатора сигнал с уровнем - 4 дБм поступает на усилитель с коэффициентом усиления 14 дБ и далее на формирователь меандра с частотой 120 МГц. Последний целесообразно изготовить на компараторе ADCMP 551 фирмы Analog Devices (http://www.analog.com/media/en/technical-documentation/data-sheets/ADCMP551_552_553.pdf).
Антенный усилитель может быть реализован с помощью изделия фирмы IKUSI SBA 110, а разветвитель: TLPG-3E фирмы LANS. В качестве 1.3.1 использован согласованный несимметричный вибратор.
Первое запоминающее устройство 1.4l предназначено для упорядоченного хранения квадратурных составляющих сигнала Sl(ti) совместно со значениями времени их получения ti, а также координат БПЛА (X, Y, Z)n и времени их измерения tn. Представляет собой буферное запоминающее устройство и легко реализуется на репрограммируемых постоянных запоминающих устройствах (серии КМ 1609) и дискретных элементах ТТЛ-серии (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю. Гордонов и др.; Под ред. А.Ю. Гордонова. - М.: Радио и связь, 1990. - 288 с. )
Реализация блока навигации 1.5 известна и трудностей не вызывает. Для обеспечения более высокой точности местоопределения (3-5 м) блок 1.5 может быть реализован в соответствие с Пат. РФ №№2553270, 2371733 или 2374659.
Управление БПЛА «Орлан-10» реализуют с первого АРМ (блоки 2.1, 2.2 и 2.7) по низкоскоростному каналу связи на частотах 900-920 МГц в режиме псевдослучайной перестройки рабочей частоты. По этому каналу (блоки 2.2 и 1.8) осуществляют задание маршрута полета, высоту полета и порядок облета: проход на высоте или барражирование и т.д. Управляющая информация формируется с помощью блока 2.1, в качестве которого может использоваться ноутбук. Кроме того, блоком 2.8 формируются команды на перестройку АПМ 1.3 БПЛА l1 и 12 (в общем случае 11-1L).
Результаты измерений на НПУ 2 с бортов БПЛА 11 и 12 поступают по соответствующим высокоскоростным каналам на частотах 2000-2500 МГц на второе АРМ. Скорость передачи информации в каналах составляет 4 Мбит/с. Дальность связи зависит от высоты полета и местных условий и в среднем составляет 100-130 км. С помощью второго АРМ осуществляют обнаружение, распознавание и определение координат заданных ИРИ.
Коррелятор 2.4 предназначен для выполнения вычислений в соответствии с выражением (4). Его реализация известна и трудностей не вызывает (см., например, пат. РФ №1840069, МПК G06F 17/15; Залмазон Л.А. Преобразование Фурье, Уолша, Харра и их применение в управлении, связи и других областях. - М.: Наука, 1989. - 496 с).
Второе запоминающее устройство 2.9 предназначено для хранения исходных данных: координат центра района поиска (Хс, Yc, Zc), максимального отклонения от центра района поиска (Мх, Му, Mz), шага квантования пространства поиска (Δx, Δy, Δz), числа градаций по осям координат (Nx, Ny, Nz), цифровой карты района поиска (зоны контроля). Эти данные поступают перед началом работы устройства по второй входной шине 2.11 наземного пункта управления 2. Они необходимы для выполнения вычислений, выполняемых блоком 2.5 в процессе работы заявляемого устройства. Реализация блока 2.9 известна и трудностей не вызывает (см. Лебедев О.Н. Микросхемы памяти и их применение. - М.: Радио и связь, 1990. - 160 с.; Большие интегральные схемы запоминающих устройств: справочник / А.Ю. Гордонов и др.; Под ред. А.Ю. Гордонова и Ю.Н. Дьякова. - М.: Радио и связь, 1990. - 288 с. ).
Второе устройство обработки и отображения информации 2.5 (см. фиг. 6) предназначено для определения координат ИРИ путем реализации операций в соответствии с выражениями (10)-(13). На постоянной основе в алгоритме работы блока 2.5 прописана система координат, в которой будет синтезироваться разностная апертура. В качестве последней целесообразно использовать фиксированную относительно земли декартову систему координат (F). Местоположение начала которой задает оператор через второй блок управления 2.8. При этом ось Y направлена на север по касательной к географическому меридиану, ось Z - по геодезической вертикали вверх, а ось X дополняет систему до правой. Известно, что навигационная система носителя (блок 1.5l) измеряет местоположение в земной системе координат (E), то пересчет траекторий ФЦА двух АПМ в блоке 2.5 осуществляют в единой системе координат (S) в соответствии с выражением (6)

l - номер носителя,  - координаты l-го ФЦА в земной (Е) системе координат в момент времени n.
- координаты l-го ФЦА в земной (Е) системе координат в момент времени n.
Кроме того, для расчета эталонных сигналов в соответствии с (10) и (11) на третью группу входов блока 2.5 поступают (с группы информационных выходов блока 2.9) исходные данные: (Хс, Yc, Zc), (Мх, My, Mz), (Δx, Δy, Δz), (Nx, Ny, Nz). Дополнительно к этому для обеспечения наглядности индикации результатов определения координат ИРИ на третью группу входов блока 2.5 подается цифровая карат зоны контроля (района поиска).
Второе устройство обработки и отображения информации 2.5 (см. фиг. 6) содержит последовательно соединенные первый коррелятор 2.5.5, второй сумматор 2.5.6, делитель 2.5.7, блок памяти 2.5.8, блок анализа 2.5.9 и блок индикации 2.5.10, первая группа входов которого является группой выходов второго устройства обработки и индикации 2.5 и выходной шиной 2.6 НПУ 2, вторая группа входов блока 2.5.10 является третьей группой входов блока 2.5, последовательно соединенные блок возведения в квадрат 2.5.1, первый сумматор 2.5.2, блок извлечения квадратного корня 2.5.3 и умножитель 2.5.4, группа информационных выходов которого соединена с группой входов делителя блока 2.5.7, первая группа входов первого коррелятора 2.5.5 является второй группой входов второго устройства обработки и отображения информации 2.5, последовательно соединенные первый вычислитель 2.5.11, второй вычислитель 2.5.12 и второй коррелятор 2.5.13, группа выходов которого соединена со второй группой информационных входов первого коррелятора 2.5.5, вторая группа информационных входов умножителя 2.5.4 объединена с группами входов управления первого 2.5.2 и второго 2.5.6 сумматоров и второй группой информационных входов первого вычислителя 2.5.11 и является первой группой входов второго устройства обработки и отображения информации 2.5, первая группа информационных входов блока 2.5.11 объединена с группой информационных входов блока возведения в квадрат 2.5.1 и группой информационных входов первого коррелятора 2.5.5 и является второй группой входов блока 2.5, а третья группа информационных входов блока 2.5.11 объединена со второй группой информационных входов блока индикации 2.5.10.
Работа устройства обработки и отображения информации 2.5 осуществляется под управлением блока 2.8.
Штатный режим работы заявляемого устройства предусматривает синтез разностной апертуры при одновременном приеме НПУ 2 сигналов от двух пространственно разнесенных АПМ 1.31 и 1.32.
Разностные траекторные сигналы Q(n)=S(tn), взятые в момент времени tn, tn=n/Fd,  с выходов коррелятора 2.4 поступают на первую группу входов первого коррелятора 2.5.5. Кроме того, значение Q(n) одновременно поступает на информационные входы блока возведения в квадрат 2.5.1 и первого вычислителя 2.5.11. С помощью блоков 2.5.1-2.5.4, 2.5.5-2.5.7 и 2.5.11-2.5.13 для каждого элемента разрешения зоны контроля вычисляется характеризующая его величина Ak в соответствии с (12). При этом с помощью блоков 2.5.5, 2.5.6 и 2.5.11-2.5.13 определяется модуль суммы корреляционных функций
с выходов коррелятора 2.4 поступают на первую группу входов первого коррелятора 2.5.5. Кроме того, значение Q(n) одновременно поступает на информационные входы блока возведения в квадрат 2.5.1 и первого вычислителя 2.5.11. С помощью блоков 2.5.1-2.5.4, 2.5.5-2.5.7 и 2.5.11-2.5.13 для каждого элемента разрешения зоны контроля вычисляется характеризующая его величина Ak в соответствии с (12). При этом с помощью блоков 2.5.5, 2.5.6 и 2.5.11-2.5.13 определяется модуль суммы корреляционных функций  для n=0, 1, …, NSA. Эталонный разностный траекторный сигнал Pk(n) находится с помощью блоков 2.5.11-2.5.13. В первом вычислителе 2.5.11 осуществляется пересчет траекторий двух ФЦА в единую систему координат (S) в соответствии с (6). С учетом того, что выполняют переход от земной системы координат (Е) к фиксированной относительно земли декартовой системе координат (S) выражение (6) преобразуется в (14). Для реализации данной функции на первую группу информационных входов блока 2.5.11 с первой группы входов второго блока управления 2.8 поступают геодезические координаты начала ФСК (S). На второй группе его информационных входов присутствуют координаты l-го ФЦА в земной (Е) системе координат в момент времени n
для n=0, 1, …, NSA. Эталонный разностный траекторный сигнал Pk(n) находится с помощью блоков 2.5.11-2.5.13. В первом вычислителе 2.5.11 осуществляется пересчет траекторий двух ФЦА в единую систему координат (S) в соответствии с (6). С учетом того, что выполняют переход от земной системы координат (Е) к фиксированной относительно земли декартовой системе координат (S) выражение (6) преобразуется в (14). Для реализации данной функции на первую группу информационных входов блока 2.5.11 с первой группы входов второго блока управления 2.8 поступают геодезические координаты начала ФСК (S). На второй группе его информационных входов присутствуют координаты l-го ФЦА в земной (Е) системе координат в момент времени n  Полученные на выходе блока 2.5.11 значения
Полученные на выходе блока 2.5.11 значения  поступают на группу информационных входов второго вычислителя 2.5.12. В функции последнего входит вычисление опорных (эталонных) сигналов с длиной волны λ. для каждого элемента разрешения заданной зоны контроля zl,k(n) в соответствии с (10). Далее в корреляторе 2.5.13 определяется разностный траекторный сигнал Pk(n) в соответствии с (11). Значение
поступают на группу информационных входов второго вычислителя 2.5.12. В функции последнего входит вычисление опорных (эталонных) сигналов с длиной волны λ. для каждого элемента разрешения заданной зоны контроля zl,k(n) в соответствии с (10). Далее в корреляторе 2.5.13 определяется разностный траекторный сигнал Pk(n) в соответствии с (11). Значение  поступает на вторую группу информационных входов первого коррелятора 2.5.5.
поступает на вторую группу информационных входов первого коррелятора 2.5.5.
Блоки 2.5.1-2.5.4 предназначены для определения величины, необходимой для выполнения операции нормирования в выражении (12).
На выходе делителя 2.5.7 формируется величина Ak, характеризующая k-й элемент разрешения зоны контроля. Полученные по выше рассмотренному алгоритму значения Ak, k=0, 1, … К-1, запоминаются в соответствующих ячейках блока памяти 2.5.9. Нахождение местоположения ИРИ осуществляют путем поиска элемента разрешения с наибольшей данной величиной

с помощью блока анализа 2.5.9. Результаты измерений координат ИРИ поступают на группу входов блока индикации 2.5.10 и подсвечиваются на мониторе на фоне цифровой карты заданного района. Кроме того, результаты измерений в заданном формате поступают на выходную шину 2.6 НПУ 2.
В случае необходимости перестройки приемных трактов АПМ 1.31 и 1.32 в частотном диапазоне ΔF блоком управления 2.8 формируется соответствующая команда, поступающая через блоки 2.2 и 1.8 на борт БПЛА (блок 1.3.5).
При возникновении ситуации, когда обеспечен прием сигналов лишь одним АПМ 1.3l, блоком управления 2.8 формируется информация для оператора о необходимости изменения маршрута полета соответствующего БПЛА.
Реализация всех элементов блока 2.5 известна и трудностей не вызывает. Для уменьшения массогабаритных характеристик, потребляемого тока блоки с 2.5.1 по 2.5.13 целесообразно реализовать на специализированном процессоре TMS320c6416 (см. TMS320c6416: http://www.ti.com/lit/ds/sprs226m/sprs226m.pdn. Алгоритм работы блока 2.5 приведет на фиг. 2.
Второй блок управления 2.8 предназначен для управления работой АПМ 1.3/ (с его помощью задаются значения Fds, TSA, Fd, NSA, управляет перестройкой приемных трактов в полосе частот ΔF) и вторым устройством обработки и отображения информации 2.5 (задает точку начала координат (BF, LF, 0), параметр NSA. Кроме того, блок 2.8 обеспечивает принятие решения о текущем приеме сигналов одного или обеих АПМ. Реализация блока известна и трудностей не вызывает. Может быть реализован на микропроцессорной сборке с достаточным быстродействием (см. Шевкопляс Б.В. микропроцессорные структуры, инженерные решения: Справочник. - 2-е изд., перераб. и доп. - М.: Радио и связь, 1990. - 512 с. )
В обществе с ограниченной ответственностью «Специальный Технологический Центр», г. Санкт-Петербург, выполнено макетирование предлагаемого устройства.
В качестве блока приема и преобразования 1.3.3 использован «Модуль приема и преобразования», разработанный ООО «СТЦ» и получивший наименование УИЕС 468151.013. Последний представляет из себя трехканальное радиоприемное устройство с полосой пропускания 20 МГц каждого из каналов. Обеспечивает одновременный прием сигналов в полосе 60 МГц. В качестве блока опорных частот 1.3.5 использован «Модуль генераторов частот 10/120 МГц», получивший наименование УИЕС 467871.006, разработанный ООО «СТЦ». Блоки 2.4, 2.5, 2.8 и 2.9 были одновременно реализованы на персональном компьютере. В качестве минимальных требований к нему можно предъявить следующее: процессор Core i 5 2000 МГц, 1 ГБ оперативной памяти, 200 МБ свободного пространства на жестком диске. Программная составляющая: операционная система Windows XP SP2 и выше, библиотека NetFrame Work 4.0, цифровая карта местности с информацией о рельефе и формате совместимом с картами «Группы «Панорама».
Выполнена экспериментальная проверка предлагаемых способа и устройства определения координат ИРИ. Для этой цели совместно с названными элементами макета устройства были использованы БПЛА «Орлан-10» производства ООО «СТЦ» г. Санкт-Петербург. В качестве источника сигналов применялись радиостанции TR 600с, VX-6R и генератор фирмы Marconi Instruments SG 2022с (диапазон частот 10 кГц - 1 ГГц). Геодезические координаты источников были известны с высокой точностью. Во всех экспериментах, для удобства, начало ФСК было совмещено с координатами ИРИ. Последние обеспечивали излучение радиосигналов на различных частотах с наиболее распространенными видами модуляции для УКВ-СВЧ-диапазонов. В ходе экспериментов два БПЛА двигались в разных направлениях (по сторонам квадрата) на расстоянии 4 км от ИРИ на высоте 1 км со средней скоростью 25 м/с.
Выполнен анализ по определению оптимальных взаимных траекторий перемещения БПЛА относительно ИРИ. Из теории классического синтеза апертуры (СА) (см. Кондратенков Г.С. Радиовидение. Радиолокационные системы дистанционного зондирования Земли / Г.С. Кондратенков, А.Ю. Фролов. - М: Радиотехника. 2005. - 368 с. ) известно, что разрешающая способность последней по различным координатам зависит от траектории полета БПЛА. В общем случае СА обеспечивает пространственную селекцию по всем координатам (х, y, z), однако ее эффективность различна и определяется скоростью измерения фазового члена

где r0(t) - расстояние от начала координат до траектории перемещения антенны в момент времени t, rρ(t) - расстояние точечного объекта с координатой ρ до траектории перемещения антенны в момент времени t.
При синтезе разностной апертуры пространственная селекция определяется скоростью изменения фазового члена вида:

где (*)i относится к траектории i-й антенны, i=1,2. Таким образом, если обе приемные антенны перемещаются относительно ИРИ во время синтеза апертуры, то эффективность пространственной селекции будет зависеть не только от траектории перемещения приемных антенн, но и от направления их взаимного движения.
Из (16) следует, что выбор траекторий полета БПЛА ОП и ВП позволяет достигнуть как улучшения пространственного разрешения по сравнению с СА, так и его ухудшения.
Исследования показали, что наилучшие результаты достигаются при движении двух БПЛА по разным сторонам квадрата вокруг ИРИ в противоположных направлениях. Данный маршрут обеспечивает хорошее разрешение по обеим координатам в горизонтальной плоскости. На фиг. 7.а приведен один из отрезков данного маршрута (интервал времени t1-t2), а на фиг. 7.б показан полученный для метода CPA элемент разрешения (сечение модуля ФН на уровне 0,7). На фиг. 7.в и 7.г приведены элементы разрешения для каждой траектории в отдельности. Из их рассмотрения видно, что для этого маршрута полета БПЛА ОП и ВП, разрешение методом CPA в два раза лучше по обеим координатам, чем дает подход СА. Траектории полета БПЛА ОП и ВП могут осуществляться и по одной стороне от ИРИ. В этом случае маршруты полета БПЛА должны быть значительно разнесены в пространстве. Расстояние между бортами должно быть соизмеримо с дальностью до ИРИ. На фиг. 8 приведен один из отрезков данного маршрута вместе с элементами разрешения для методов CPA и СА. Другим эффективным подходом при решении данной проблемы является движение двух БПЛА по смежным сторонам квадрата. На фиг. 9 приведен один из отрезков данного маршрута вместе с элементами разрешения для методов CPA и СА.
В качестве варианта, дающего отрицательный результат, является движение двух БПЛА по близким (как у прототипа) траекториям на одной скорости на расстоянии значительно меньшем дальности до ИРИ. В этом случае метод CPA не обеспечивает пространственную селекцию.
В ходе выполнения экспериментов были оценены точностные характеристики предлагаемых способа и устройства определения координат ИРИ (см. табл. 1).
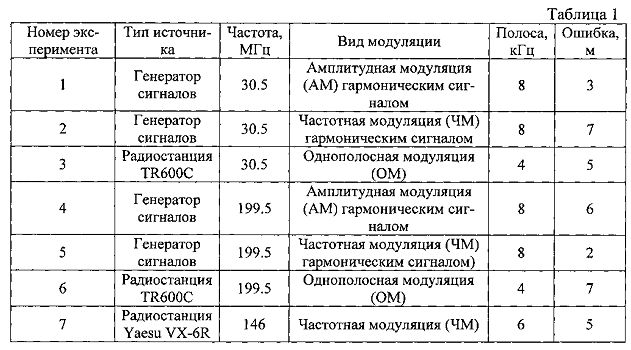
В ходе экспериментов 1-6 два БПЛА двигались вокруг ИРИ по противоположным сторонам квадрата в разных направлениях на расстоянии 4 км и высоте 1 км со средней путевой скоростью 25 м/с. Траектории БПЛА 1 и БПЛА 2 длительностью 10 минут (для эксперимента №1) изображены на фиг. 10.а.
На траекториях отмечено время в секундах от начала старта эксперимента. В эксперименте №7 движение БПЛА осуществлялось по смежным сторонам квадрата (см. 10.б.)
Длительность каждого из экспериментов 1-6 составляла 10 минут, эксперимент 7 длился 5 минут. Ошибка местоположения определялась как расстояние от максимума суммарной ФН (полученной путем наложения всех ФН, рассчитанных на траектории) до известного местоположения ИРИ. Полученные ошибки определения местоположения ИРИ, приведены в табл. 1. На фиг. 11 представлены полученные суммарные ФН для экспериментов 1-7, а также элементы разрешения в ФСК (шаг по x - 10 м, шаг по y - 5 м). На всех рисунках «+» обозначено местоположение ИРИ, «•» - максимум ФН. Из представленных результатов следует, что предложенный способ позволяется определить местоположение ИРИ на расстоянии 4 км с высокой точностью (погрешность измерений для различных видов модуляции в заявленном диапазоне частот не превышает 7 м.)
При непрерывном сигнале ИРИ (использовании генератора сигналов) время когерентного накопления (время синтеза апертуры) ограничивается точностью сопровождения ФЦА и нестабильностями фазы в приемных каналах. В случае использования радиостанций, время синтеза апертуры ограничено также длительностью передачи сигнала от ИРИ. Радиостанции включались в среднем на 20 секунд через каждые 20 сек.
В экспериментах считалось, что высота ИРИ известна (находились на земной поверхности).
На фиг. 12-14 приведены результаты одиночного синтеза разностных апертур в 1, 6 и 7 экспериментах.
Для несущей частоты 30.5 МГц время когерентного накопления, определяемое точностью сопровождения ФЦА и нестабильностями фазы в приемных каналах, составило 100 секунд. Пример одной из синтезированных разностных апертур для непрерывного сигнала с AM модуляцией (эксперимент 1) представлен на фиг. 12.
На фиг. 12.а приведены отрезки траекторий БПЛА, на которых была синтезирована разностная апертура, а на фиг. 12.б их путевые скорости БПЛА. На данном отрезке длительностью 100 секунд, БПЛА 1 двигался со средней скоростью 22 м/с, а БПЛА 2 двигался со средней скоростью 15 м/с. На фиг. 12.в, г показаны спектры сигналов, принятых АПМ двух БПЛА. В свою очередь на фиг. 12.д иллюстрируется частота разностного траекторного сигнала (1), принятого на двух БПЛА, и частота эталонного разностного траекторного сигнала (2), полученного с помощью (10) и (11) при известных координатах ИРИ и измеренных траекторий ФЦА. Разность фаз между эталонным и принятым траекторными сигналами представлена на фиг. 12.е. Для данного примера (шаг по x - 10 м, шаг по y - 5 м) на фиг. 2.ж показана полученная ФН, а на фиг. 12.з изображен элемент разрешения в ФСК.
Для несущей частоты 199.5 МГц время когерентного накопления, определяемое точностью сопровождения ФЦА и нестабильностями фазы в приемных каналах, составило 15-20 секунд. Пример одной из синтезированных разностных апертур для сигнала с однополосной модуляцией (эксперимент 6) представлен на фиг. 13.
Для несущей частоты 146 МГц время когерентного накопления, определяемое точностью сопровождения ФЦА и нестабильностями фазы в приемных каналах, составило 30-35 секунд. Пример одной из синтезированных разностных апертур в ходе эксперимента 7 представлен на фиг. 14.
Таким образом, экспериментальная проверка подтвердила возможность достижения положительного эффекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство определения координат источника радиоизлучения | 2017 |
|
RU2659808C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2305851C2 |
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |
| НАЗЕМНЫЙ КОМПЛЕКС РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ "АВТОБАЗА-М" | 2015 |
|
RU2615992C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2019 |
|
RU2718739C1 |
| СИСТЕМА РАДИОСВЯЗИ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2024 |
|
RU2839424C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА МОНИТОРИНГА ОТКРЫТЫХ АВТОМОБИЛЬНЫХ СТОЯНОК И ОПРЕДЕЛЕНИЯ СВОБОДНЫХ МЕСТ ДЛЯ ПАРКОВКИ АВТОМОБИЛЕЙ | 2015 |
|
RU2602891C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2007 |
|
RU2339966C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
Изобретения относятся к радиотехнике и могут быть использованы для определения координат источников радиоизлучений в ультракоротковолновом (УКВ) и сверхвысокочастотном (СВЧ) диапазонах радиоволн, использующих узкополосные сигналы. Достигаемый технический результат - обеспечение повышения точности определения координат источников радиоизлучений (ИРИ) в УКВ-СВЧ-диапазонах радиоволн. Указанный результат достигается за счет того, что используется алгоритм синтеза разностной апертуры, позволяющий устранить влияние нестабильности фазы передатчика, а также учесть модуляцию сигнала ИРИ. Указанный результат также достигается оптимизацией маршрута полета носителей основной (ОП) и выносной (ВП) позиций пассивного локатора, а также тем, что формируют наземный пункт управления (НПУ), по командам которого осуществляют одновременный синхронный прием сигналов ИРИ антенно-приемными модулями ОП и ВП и формирование квадратурных составляющих огибающих сигнала и передачу их на НПУ совместно с данными о времени приема сигнала и пространственном положении фазовых центров приемных антенн, формирование на их основе разностных траекторных значений S(ti) путем попарного перемножения квадратурных составляющих сигнала S1(ti), принятых на ОП в момент времени ti с соответствующими комплексно сопряженными значениями квадратурных составляющих сигнала  принятыми в ВП в момент времени ti, нахождение на основе S(ti), полученных на интервале синтезирования I·Δt, местоположения ИРИ с применением метода согласованной обработки. Способ реализуется с помощью устройства, выполненного определенным образом. 2 н. и 3 з.п ф-лы, 14 ил., 1 табл.
принятыми в ВП в момент времени ti, нахождение на основе S(ti), полученных на интервале синтезирования I·Δt, местоположения ИРИ с применением метода согласованной обработки. Способ реализуется с помощью устройства, выполненного определенным образом. 2 н. и 3 з.п ф-лы, 14 ил., 1 табл.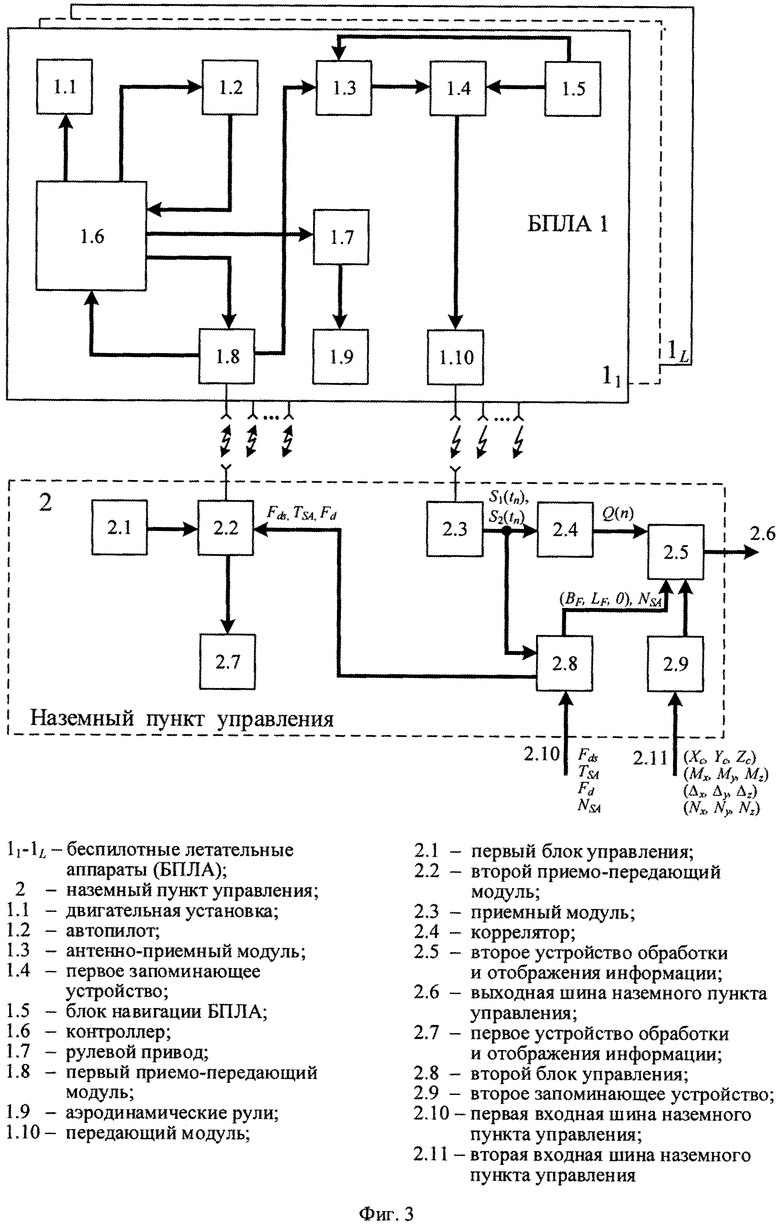
1. Способ определения координат источника радиоизлучения, включающий прием сигнала источника радиоизлучения (ИРИ) на антенно-приемные модули (АПМ), установленные на двух движущихся механически связанных носителях, образующих основную (ОП) и выносную (ВП) позиции пассивного локатора (ПЛ), обнаружение сигнала ИРИ и определение его несущей частоты, формирование во время движения с помощью ОП и ВП квадратурных составляющих огибающих сигнала ИРИ на выходах АПМ с частотой Fds, неоднократное измерение на интервале дальности, являющемся интервалом синтезирования, этих квадратурных составляющих и их совместное запоминание с временем измерения в момент каждого такта оценивания этих огибающих с последующим нахождением на основе данных, полученных на интервалах синтезирования, местоположения ИРИ, отличающийся тем, что используют ТУ выносных позиций пассивных локаторов, N≥1, базирующихся на отдельных носителях, формируют наземный пункт управления (НПУ), по командам которого осуществляют одновременный синхронный прием сигнала ИРИ антенно-приемными модулями ОП и ВП и формируют квадратурные составляющие огибающих сигнала и передают их по соответствующим каналам связи на НПУ совместно с данными о времени приема сигнала ti и пространственном положении фазовых центров приемных антенн АПМ ОП и ВП, совместно и упорядоченно запоминают на НПУ значения квадратурных составляющих сигнала и их временных параметров, а также временных и пространственных параметров, соответствующих ОП и ВП, формируют на их основе разностные траекторные значения S(ti) путем попарного перемножения запомненных квадратурных составляющих сигнала S1(ti), принятых на ОП в момент времени ti, с соответствующими комплексно сопряженными значениями квадратурных составляющих сигнала 
2. Способ по п. 1, отличающийся тем, что на основных и выносных позициях используется только по одному антенно-приемному модулю.
3. Способ по п. 1, отличающийся тем, что для согласованной обработки результатов измерений умножают принятый разностный траекторный сигнал на опорную функцию, представляющую собой комплексно сопряженный разностный траекторный сигнал от ИРИ, расположенного в элементе разрешения с заданными координатами, накапливают сигнал по модулю в течение времени синтеза, нормируют, получают величины, характеризующие элементы разрешения, находят местоположение ИРИ путем поиска элемента разрешения с наибольшей данной величиной.
4. Способ по п. 1, отличающийся тем, что синхронизацию измерения параметров на ОП и ВП осуществляют автономно каждым носителем с использованием меток времени спутниковой системы навигации.
5. Устройство определения координат источника радиоизлучения, состоящее из двух и более идентичных беспилотных летательных аппаратов (БПЛА) и наземного пункта управления (НПУ), причем каждый из БПЛА содержит последовательно соединенные контроллер, рулевой привод и аэродинамические рули, автопилот, группа информационных входов которого соединена с второй группой информационных выходов контроллера, первая группа информационных входов которого соединена с группой информационных выходов автопилота, двигательную установку, группа информационных входов которой соединена с третьей группой информационных выходов контроллера, первый L-канальный приемопередающий модуль, группа информационных входов которого соединена с четвертой группой информационных выходов контроллера, вторая группа информационных входов которого соединена с первой группой информационных выходов первого приемопередающего модуля, последовательно соединенные первое запоминающее устройство и передающий модуль, блок навигации БПЛА, группа информационных выходов которого соединена со второй группой информационных входов первого запоминающего устройства, а НПУ выполнен содержащим последовательно соединенные первый блок управления, предназначенный для управления взлетом, полетом и посадкой БПЛА, второй L-канальный приемопередающий модуль и первое устройство обработки и отображения информации, последовательно соединенные L-канальный приемный модуль, второй блок управления, предназначенный для задания исходных данных и формирования команды на определение координат источника радиосигнала и второе устройство обработки и отображения информации, группа информационных выходов которого является выходной шиной наземного пункта управления, отличающееся тем, что дополнительно в каждый БПЛА введено по одному антенно-приемному модулю (АПМ), группа информационных выходов каждого из которых соединена с первой группой информационных входов соответствующего первого запоминающего устройства, а группа входов управления соединена со второй группой информационных выходов первого приемо-передающего модуля, а в НПУ дополнительно введены коррелятор, группа информационных выходов которого соединена со второй группой информационных входов второго устройства обработки и отображения информации, а группа информационных входов объединена с первой группой входов второго блока управления, вторая группа выходов которого соединена со второй группой информационных входов второго приемо-передающего модуля, второе запоминающее устройство, группа информационных входов которого является второй установочной шиной наземного пункта управления, а группа информационных выходов соединена с третьей группой входов второго устройства обработки и отображения информации, а вторая группа информационных входов второго блока управления является первой установочной шиной наземного пункта управления.
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2014 |
|
RU2550811C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2012 |
|
RU2516432C2 |
| СПОСОБ АДАПТИВНОГО ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ ПАРАМЕТРОВ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2423719C1 |
| Способ газовой дезинсекции зерна в хранилищах | 1947 |
|
SU77866A1 |
| WO 1996002007 A1, 25.01.1996 | |||
| МАЛОКАДРОВАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2012 |
|
RU2517042C2 |
| JP 8036040 A, 06.02.1996. | |||

