Область техники
Изобретение относится к автоматике и вычислительной технике и может быть использовано при построении систем и комплексов противовоздушной обороны тактического звена управления, особенно для обнаружения и сопровождения скоростных, маневренных, низколетящих целей при помощи оптико-электронных систем.
Уровень техники
Известен способ обнаружения и сопровождения цели, при котором измеряют расстояние до цели и линейную скорость полета цели Vц при помощи оптико-электронных систем, реализованный в современных зенитно-ракетных комплексах малой дальности.
Современные зенитно-ракетные комплексы малой дальности, например: «Avenger» американской фирмы «Boeing Aerospace Company», «Crotale NG» французской компании «Thales Air Defense», «Панцирь-С1», изделие «Конструкторского бюро приборов» г. Тула, предназначены для обнаружения, сопровождения и уничтожения воздушных целей и в том числе низколетящих целей в зоне ответственности войсковой противовоздушной обороны.
Для успешного решения этой задачи путем обнаружения целей на предельных дальностях работы радиолокационных станций с последующим их молчанием новейшие зенитно-ракетные комплексы оснащены оптико-электронными системами, которые без излучения радиоволн (как у радиолокационных станций), в пассивном режиме, при любых погодных условиях, ночью и днем позволяют в пределах прямой видимости, получив информацию о цели (азимутальные углы, расстояния до низколетящей цели и углы места) от радиолокационных станций, обнаруживать и сопровождать низколетящие цели от предельных дальностей до минимальных расстояний от пусковой установки.
Комплексы оснащаются коммуникационным оборудованием, обеспечивающим прием информации о целеуказании и отображение воздушной обстановки, поступающей от вышестоящих командных пунктов противовоздушной обороны.
Оптико-электронные системы (на примере зенитно-ракетного комплекса «Avenger») состоят, из нескольких устройств: прицела оптического диапазона СА-562 фирмы CAI, тепловизора Magnavox AN/VLR-1 (или IR-18), лазерного дальномера.
Таким образом, в современных зенитно-ракетных комплексах имеется оптико-электронная система, жестко связанная (конструктивно) с пусковой установкой зенитно-ракетного комплекса. Маневренность оптико-электронной системы в этом случае очень мала и полностью определяется маневренностью самой пусковой установки, число степеней свободы перемещения которой равно 2D и определяется, в основном, рельефом местности.
Кроме этого недостатка существенным является тот факт, что «поскольку средства воздушного нападения используются как на больших (свыше 10 км), так и на предельно малых (5-15 м) высотах, средства их сопровождения должны иметь, с одной стороны, максимальную дальность сопровождения (более 10 км), а с другой - достаточно малую ближнюю зону. Увеличение максимальной дальности влечет за собой рост размера входных зрачков оптических приборов и, как следствие, их массы и габаритов. А требование по сокращению ближней зоны вызывает необходимость повышения динамических возможностей сервоприводов, но рост массы нагрузки и, соответственно, моментов инерции и трения препятствует решению этой задачи. Таким образом, даже в первом приближении задача создания оптико-электронной системы сопровождения является внутренне противоречивой …» (Оптико-электронная система сопровождения цели и ЗУР. Статья в электронном журнале Авиапанорама (39), №3, июнь, 2003 г., www.aviapanorama.su, где описаны конструкционные особенности зенитно-ракетного комплекса «Панцирь-С1»). Таким образом, на малых расстояниях до цели сервопривода оптико-электронной системы не могут развить необходимую угловую скорость для успешного сопровождения скоростной низколетящей цели. В этом случае «применяется инерционное сопровождение цели по экстраполированным координатам из-за перерыва оптической связи с целью …».
Поэтому техническое решение по использованию оптико-электронных систем, установленных на зенитно-ракетных комплексах, для обеспечения контроля над всеми участками поверхности земли, закрытой от прямой видимости этих оптико-электронных систем, является явно не эффективным, а сами оптико-электронные системы требуют повышения динамических возможностей сервоприводов, имеют большую массу и, как следствие, имеют зоны потери оптической связи с целью.
Известен способ обнаружения и сопровождения низколетящих целей, при котором измеряют расстояние до цели и линейную скорость полета цели Vц при помощи оптико-электронных систем мобильных постов воздушного наблюдения целей (Способ обнаружения и сопровождения низколетящих целей, патент RU №2361235 C1 от 03.12.2007 г., МПК G01S 13/66, Б.Г. Майоров и др.). В отличие от указанных выше аналогов те же операции реализуются на оптико-электронных системах мобильных постов воздушного наблюдения целей, которые удалены от тактического зенитно-ракетного комплекса, устанавливаются в достаточном количестве на местности для «закрытия» всей зоны ответственности зенитно-ракетного комплекса. Этот подход позволяет не увеличивать максимальную дальность обнаружения целей за счет роста размера входных зрачков оптических приборов и, как следствие, не увеличивать их массу и габариты при построении оптико-электронных систем мобильных постов воздушного наблюдения целей. Но остается требование по сокращению ближней зоны, которое вызывает необходимость повышения динамических возможностей сервоприводов. При этом снижение массы нагрузки и, соответственно, моментов инерции и трения не обеспечивает окончательного решения этой задачи.
Но в мобильных постах воздушного наблюдения целей можно использовать свойство маневренности легких оптико-электронных систем в пространстве, если разместить их на воздушных носителях: беспилотных летательных аппаратах, квадрокоптерах и т.п. В этом случае маневренность оптико-электронных систем будет характеризоваться числом степеней свободы перемещения до 3D и будет определяться подвижностью носителя оптико-электронной системы.
Прототип способа непрерывной оптической связи с низколетящей целью не найден.
Раскрытие сущности изобретения
Предлагаемый способ непрерывной оптической связи с низколетящей целью, позволяет обнаруживать и сопровождать низколетящие цели без потери оптической связи с целью за счет маневрирования оптико-электронной системой в пространстве.
Целью данного изобретения является решение новой научно-технической задачи, а именно: сопровождение низколетящей цели в ближней зоне оптико-электронной системы мобильного поста воздушного наблюдения с предсказанием и устранением зоны потери оптической связи с низколетящей целью, возникающей при сопровождении высокоскоростной, маневренной низколетящей цели, для чего при помощи мобильного поста воздушного наблюдения и его оптико-электронной системы обнаруживают и сопровождают низколетящую цель, измеряют расстояние до цели и линейную скорость полета Vц низколетящей цели, предсказывают (экстраполируют) направление полета низколетящей цели и определяют величину минимального расстояния r от оптико-электронной системы до низколетящей цели, рассчитывают максимальную угловую скорость перемещения ωцm=Vц/r низколетящей цели относительно оптико-электронной системы, сравнивают с максимальной угловой скоростью вращения ωс датчиков оптико-электронной системы, при выполнении неравенства ωс≤ωцm, заблаговременно маневрируют оптико-электронной системой в пространстве, тем самым увеличивают величину фактического расстояния r, за счет чего снижают угловую скорость ωцm низколетящей цели, тем самым устраняют зону потери оптической связи с низколетящей целью, одновременно при выполнении неравенства ωс≤ωцm подключают к сопровождению низколетящей цели второй мобильный пост воздушного наблюдения, в зоне видимости оптико-электронной системы которого находится точка стояния первого мобильного поста воздушного наблюдения, тем самым обеспечивают увеличение расстояния r от второй оптико-электронной системы до низколетящей цели, за счет чего снижают максимальную угловую скорость ωцm низколетящей цели, тем самым обнаруживают и сопровождают низколетящую цель без потери оптической связи, непрерывно во времени, внутри всей зоны ответственности противовоздушной обороны.
Таким образом, сущность изобретения нового способа непрерывной оптической связи оптико-электронной системы с низколетящей целью состоит в постоянном контроле величины максимальной угловой скорости низколетящей цели. При обнаружении превышения этой скорости ωцm над величиной угловой скорости вращения ωс датчиков оптико-электронной системы (ωцm≥ωc), совершают маневр самой оптико-электронной системой в пространстве и увеличивают расстояние r между оптико-электронной системой и наблюдаемой целью. Кроме этого (для повышения надежности сопровождения цели) ориентируют на цель и подключают к сопровождению низколетящей цели второй мобильный пост воздушного наблюдения, в зоне видимости оптико-электронной системы которого находится точка стояния первого мобильного поста воздушного наблюдения. Такие операции изменяют знак неравенства ωс≥ωцm, чем обеспечивается непрерывная оптическая связь с низколетящей целью или ее непрерывное во времени сопровождение. Технический результат достигается без повышения динамических возможностей сервоприводов оптико-электронных систем, увеличения жесткости их конструкции, мощности, габаритов и массы электродвигателей. Технический эффект достигается за счет использования динамических свойств подвижных квадрокоптеров или других беспилотных летательных аппаратов, на которых установлены легкие, дешевые оптико-электронные системы.
Краткое описание чертежей
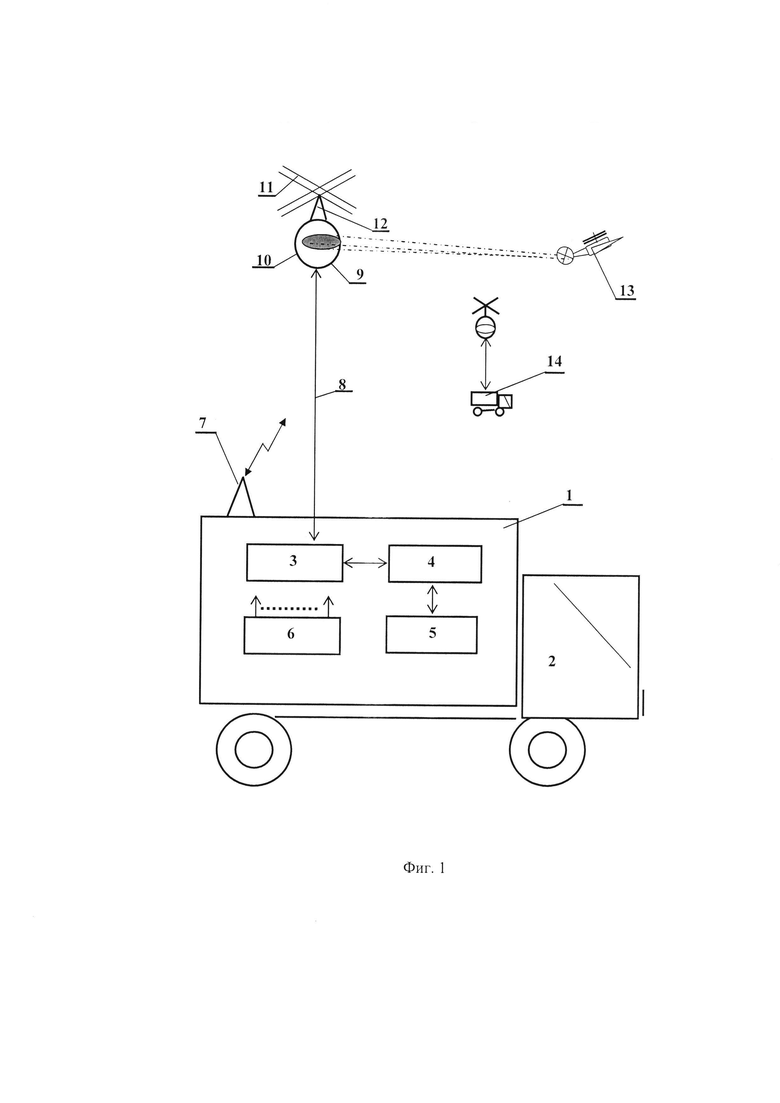
На фиг. 1 изображена схема мобильного поста воздушного наблюдения, находящегося в оптической связи с низколетящей целью, обозначены: мобильный пост воздушного наблюдения 1, мобильная платформа-автомобиль 2, электронная вычислительная машина 3, радиомодем 4, радиостанция 5, автономный блок питания 6, антенна радиостанции 7, кабель-корд 8, гондола 9 с оптико-электронной системой 10, квадрокоптер 11, приемник спутниковой навигации 12, низколетящая цель 13, второй мобильный пост воздушного наблюдения 14.
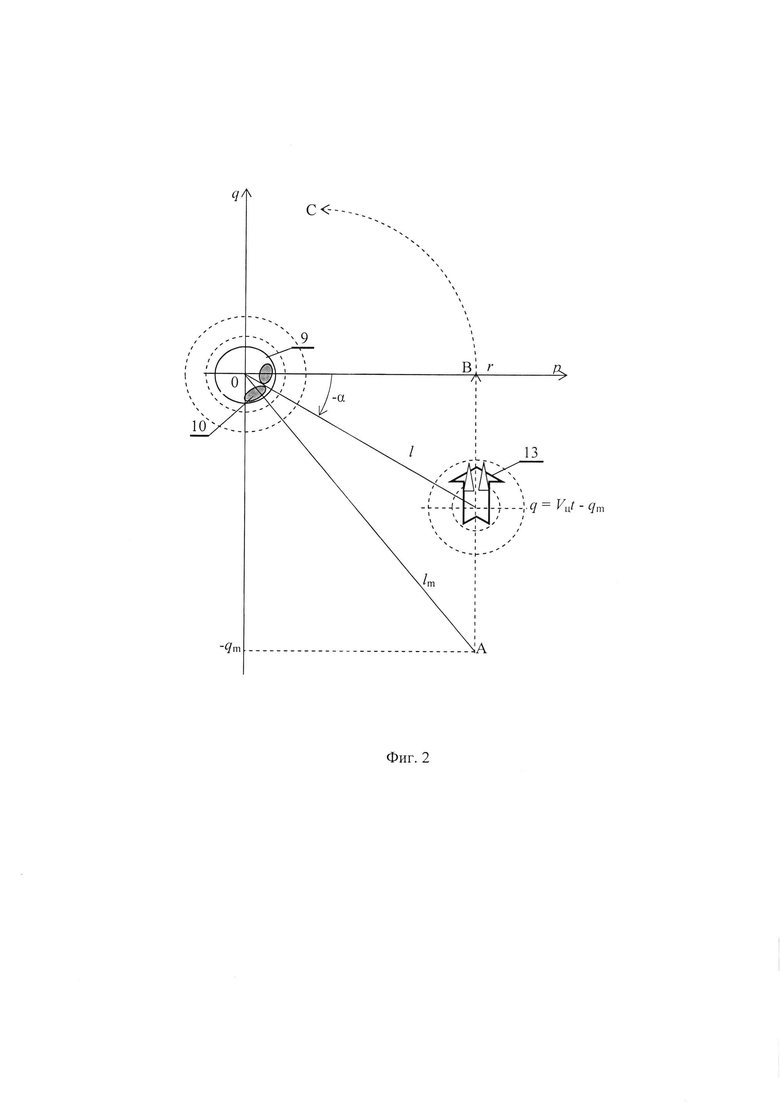
На фиг. 2 изображена (условно, вид сверху) схема взаимодействия оптико-электронной системы 10 и низколетящей цели 13, обозначены: низколетящая цель 13 (например, беспилотный, боевой вертолет), гондола 9 с оптико-электронной системой 10.
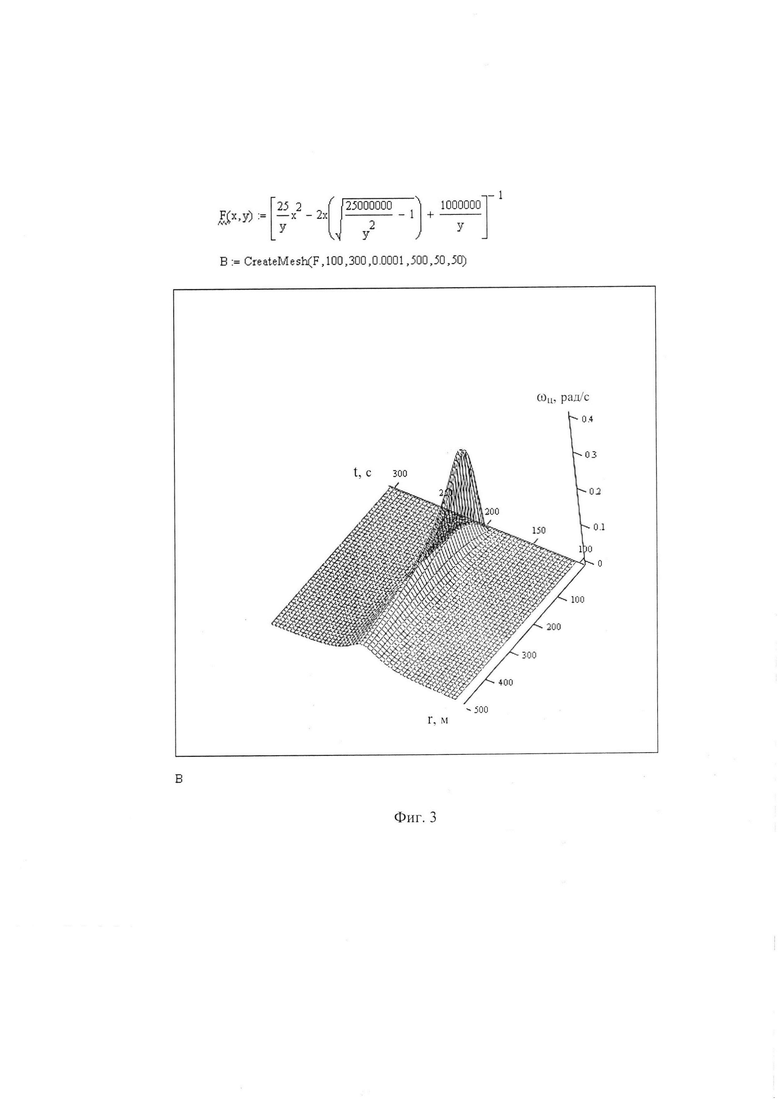
На фиг. 3 приведена формула расчета в пакете MachCAD 14.0 и изображена поверхность, соответствующая процессу возникновения зоны потери оптической связи оптико-электронной системы 10 с низколетящей целью 13 в системе координат (t, r, ωц).
На фиг. 4 приведена формула расчета в пакете MachCAD 14.0 и изображена поверхность в системе координат (t, r, ωц), с зоной потери оптической связи оптико-электронной системы 10 с низколетящей целью 13 в виде границы разреза поверхности плоскостью ωс=1 рад/с. Из фиг. 4 видна кратковременная потеря оптической связи оптико-электронной системы 10 с низколетящей целью 13 при условиях: ωцm≥1рад/с и 24,2с≤t≤25,8с.
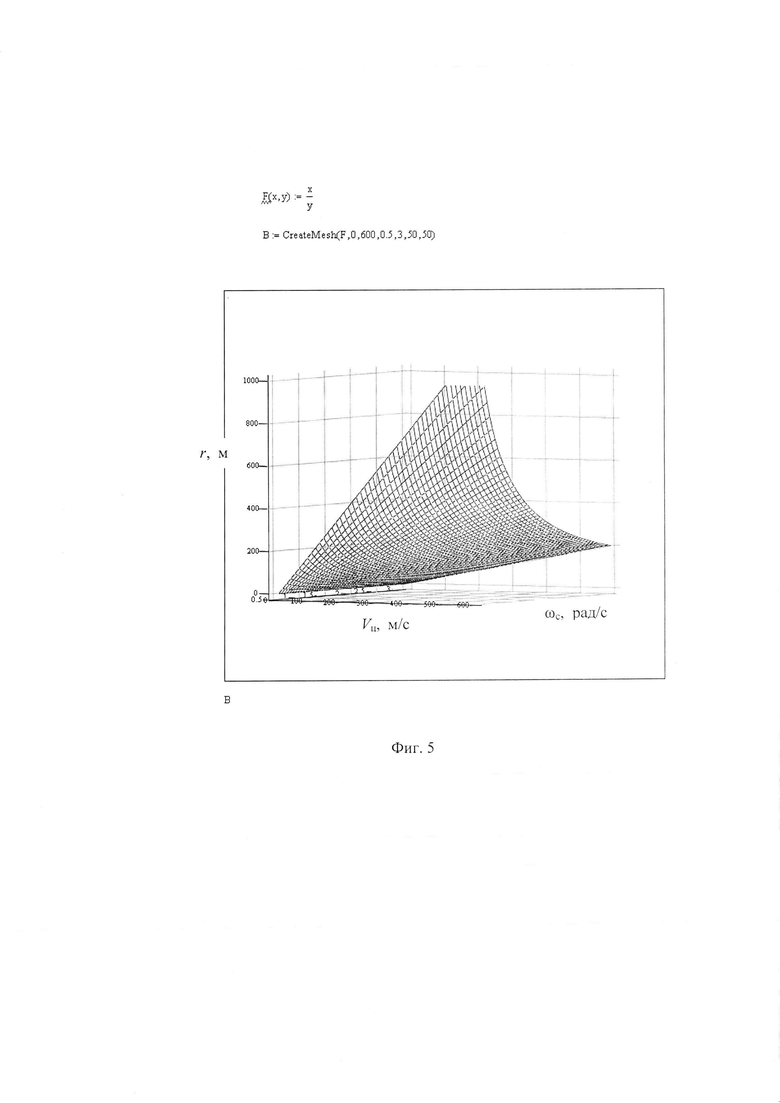
На фиг. 5 приведена формула расчета в пакете MachCAD 14.0 и изображена поверхность в системе координат (Vц, ωц, r), которая ограничивает сверху зону потери оптической связи с низколетящей целью 13. Снизу зона ограничена плоскостью r=0.
Осуществление изобретения
Перечислим без пояснений известные предварительные операции, описанные в изобретении (Способ обнаружения и сопровождения низколетящих целей, патент RU №2361235 C1 от 03.12.2007 г., МПК G01S 13/66, Б.Г. Майоров и др.). Зенитно-ракетный комплекс устанавливают в зоне ответственности противовоздушной обороны, в которой расставляют мобильные посты воздушного наблюдения 1 с оптико-электронными системами 10 и нацеливают их на низколетящую цель 13. Установку осуществляют при помощи цифровой карты и приемника спутниковой навигации 12. Обрабатывают сигналы низколетящей цели 13, поступающие от каждой оптико-электронной системы 10, на электронных вычислительных машинах 3, соответствующих мобильных постов воздушного наблюдения 1. Рассчитывают и передают азимутальные углы, расстояния до низколетящей цели 13 и углы места на бортовую электронную вычислительную машину зенитно-ракетного комплекса, измеряют расстояние от гондолы 9 до низколетящей цели 13, измеряют линейную скорость Vц этой низколетящей цели 13.
Способ непрерывной оптической связи с низколетящей целью реализуется следующим образом по группам операций:
Поясним операции: «… при помощи оптико-электронной системы 10 обнаруживают и сопровождают низколетящую цель, измеряют расстояние до цели и линейную скорость полета низколетящей цели Vц …» Эти измерительные операции не имеют новизны и осуществляются в оптико-электронной системе 2 при помощи телевизионного канала или тепловизионного канала и лазерного дальномера из состава оптико-электронной системы 10 (см. фиг. 1). Линейную скорость полета низколетящей цели Vц находят программно-аппаратным путем при помощи электронной вычислительной машины 3 мобильного поста воздушного наблюдения 1 с оптико-электронной системой 2, для чего обрабатывают данные лазерного дальномера по дальности, угол азимута и угол места, определяют координаты трассы полета цели 13 и, в итоге, определяют вектор ее скорости.
Поясним операции: «… предсказывают (экстраполируют) направление полета низколетящей цели 13 и определяют величину минимального расстояния r от оптико-электронной системы 10 до низколетящей цели 13, рассчитывают максимальную угловую скорость перемещения ωцm=Vц/r низколетящей цели 13 относительно оптико-электронной системы 10 …».
Эти и последующие операции имеют новизну, так как в известных способах обнаружения и сопровождения низколетящих целей не реализуются. Координаты точки установки на местности и подъема оптико-электронной системы 10 определяются при помощи приемника спутниковой навигации 12, установленного на гондоле 9. 3D координаты гондолы 9 и оптико-электронной системы 10 заносятся в память электронной вычислительной машины 3. При рассчитанном векторе скорости цели 13 электронная вычислительная машина 3 решает геометрическую, экстраполяционную задачу по поиску минимального расстояния r между возможной трассой пролета цели 13 и координатами положения оптико-электронной системы 10. Расчеты проводят при каждом новом замере расстояния от оптико-электронной системы 10 до цели 13. При этом учитывается теорема геометрии: кратчайшее расстояние от точки до прямой лежит на перпендикуляре, опущенном из точки на эту прямую.
Для получения необходимых выражений или математической модели возникновения зоны прерывания оптической связи рассмотрим фиг. 2, на которой изображена геометрическая модель полета цели 13 со скоростью Vц мимо оптико-электронной системы 10, расположенной в точке с координатами (р=0, q=0).
В соответствии с изображением на фиг. 2 можно записать:

где qm - ордината цели 13 в момент времени t=0;
 - дальность обнаружения цели оптико-электронной системой 10;
- дальность обнаружения цели оптико-электронной системой 10;
r - минимальное расстояние между экстраполированной трассой пролета цели 13 и оптико-электронной системой 10 (длина перпендикуляра, опущенного из точки (р=0, q=0) на прямую АВ.
Определим из (1) тангенс угла α между осью абсцисс и прямой, соединяющей низколетящую цель 13 и центр оптико-электронной системы 10:

где  - отношение наибольшего и наименьшего r расстояний до цели.
- отношение наибольшего и наименьшего r расстояний до цели.
Угловую скорость ωц полета цели 13 определим, как производную от угла α по времени t:

где  - максимальная угловая скорость цели.
- максимальная угловая скорость цели.
При помощи пакета MachCAD 14.0 рассчитаем и изобразим поверхность (см. фиг. 3) в системе координат (t, r, ωц), соответствующую математической модели (3). Для этого запишем соответствие переменных математической модели (3) и переменных пакета MachCAD 14.0: ωц~F(x, у), t~х, r~у.
На фиг. 3 изображена поверхность с вертикальным выступом, который соответствует зарождению зоны прерывания оптической связи. Сама зона не возникает из-за того, что угловая скорость вращения датчиков ωс оптико-электронной системы 10 больше максимальной угловой скорости ωцm цели 13: ωс≥ωцm.
Поясним операции: «… рассчитанную максимальную угловую скорость ωцm перемещения низколетящей цели 13 относительно оптико-электронной системы 10, сравнивают с максимальной угловой скоростью ωс вращения датчиков оптико-электронной системы 10, при выполнении неравенства ωс≤ωцm, заблаговременно маневрируют оптико-электронной системой 10 в пространстве, тем самым увеличивают величину фактического расстояния r, за счет чего снижают максимальную угловую скорость ωцm низколетящей цели 13, тем самым устраняют зону потери оптической связи с низколетящей целью 13»
На фиг. 4 изображена поверхность с вертикальным выступом, верхняя часть которого отсечена плоскостью ωс=1 рад/с. Кривая этого сечения соответствует зоне прерывания оптической связи. Из фиг. 4 видна кратковременная потеря оптической связи оптико-электронной системы 10 с низколетящей целью 13 при условиях: ωс≤ωцm, ωцm≥1 рад/с и 24,2с≤t≤25,8с.
Если бы низколетящая цель 13 продолжила полет по прямой линии, на которой лежит отрезок прямой линии АВ, то зона невидимости просуществовала бы 1,6 секунды (25,8с-24,2с=1,6с), далее оптико-электронная система 10, вращаясь с максимальной скоростью ωс в заданном ранее направлении, догнала цель 13 и снова ее обнаружила. При этом «применяется инерционное сопровождение цели по экстраполированным координатам из-за перерыва оптической связи с целью …», как справедливо замечено в статье: Оптико-электронная система сопровождения цели и ЗУР. Статья в электронном журнале Авиапанорама (39), №3, июнь, 2003 г., www.aviapanorama.su.
Другой сценарий развития событий возникнет, если цель 13 в точке В начнет делать левый вираж по криволинейной траектории ВС (см. фиг. 2). В этом случае сечение поверхности на фиг. 4, соответствующее зоне прерывания оптической связи, начинает расширяться влево и будет существовать при сохранении неравенства ωцm≥1 рад/с. Низколетящая цель 13 за время существования зоны прерывания оптической связи может скрыться от мобильного поста воздушного наблюдения 1 и его оптико-электронной системы 10.
Для того чтобы избежать последнего сценария предлагается заблаговременно увеличить величину минимального расстояния r между экстраполированной трассой пролета цели 13 и оптико-электронной системой 10, при этом скорость ωцm низколетящей цели 13 будет ωцm≤1 рад/с = ωс и зона прерывания оптической связи не возникнет.
Для повышения надежности сопровождения низколетящей цели 13 в ближней зоне оптико-электронной системы 10 мобильного поста воздушного наблюдения 1 с предсказанием и устранением зоны потери оптической связи с низколетящей целью 13 предлагается использовать второй мобильный пост воздушного наблюдения 14, в поле зрения которого находится оптико-электронная система 10. При этом системном решении величина r расстояния от второго мобильного поста воздушного наблюдения 14 до цели 13 будет достаточно большой, чтобы по формуле ωцm=Vц/r максимальная угловая скорость ωцm низколетящей цели 13 всегда была ниже угловой скорости вращения датчиков ωс≥ωцm оптико-электронной системы, принадлежащей второму мобильному посту воздушного наблюдения 14. Передача функции сопровождения цели 13 второму мобильному посту воздушного наблюдения 14 от мобильного поста воздушного наблюдения 1 и обратно осуществляется путем их сетевого автоматического взаимодействия.
Пример варианта выполнения изобретения
Одним из важнейших условий практической реализации способа является выбор или проектирование мобильных постов воздушного наблюдения 1, 14 с оптико-электронными системами 10, к которым (и их носителям) можно предъявить следующие технические требования:
- питание от двух источников (автономного аккумулятора и бензинового генератора) и, как следствие ограничение по энергопотреблению;
- малые габариты и масса оптики оптико-электронной системы 10 для уменьшения инерционности оптико-электронной системы и повышения динамических характеристик ее воздушного носителя;
- дальность действия (обнаружения и сопровождения) низколетящей цели не менее 5000 м для прицела оптического диапазона 12, тепловизора 13, лазерного дальномера 14;
- угол обзора по горизонту (Г) не менее 180°;
- угол обзора по вертикали (В) не менее 120°;
- угловая скорость ωс слежения за целью не менее 60 град/с;
- угловое ускорение ас слежения за целью не менее 100 град/с2;
- диапазон рабочих температур от -50°С до +50°С;
- требования к стабилизации линии визирования должны выполняться аппаратурой электрического квадрокоптера 11 и сервоприводом гондолы 9 оптико-электронной системы 10.
Примером отечественной оптико-электронной системы, отвечающим указанным требованиям может являться изделие RAV-165-3 HD, которое применяется для легких самолетов и беспилотных летательных аппаратов (сайт фирмы АэроРоботикс).

Приведенный пример оптико-электронной системы отечественного производителя показывает технический уровень отечественных изделий по габаритам, массе и другим техническим характеристикам, что подтверждает реальность решения технической задачи обнаружения и сопровождения низколетящих, маневренных целей без использования импортных изделий. Для перемещения мобильного поста воздушного наблюдения 1 с оптико-электронной системой 10 в точку установки могут быть использован воздушный и наземный транспорт.
Как видно из таблицы, рассматриваемая система (оптико-электронная система - низколетящая цель) характеризуется двумя параметрами, которые противоборствуют: скоростью полета Vц низколетящей цели 13 и максимальной угловой скоростью вращения ωс датчиков оптико-электронной системы 10.
В зависимости от соотношения величин этих параметров зона потери оптической связи возникает на большем или меньшем расстоянии r между трассой пролета цели 13 и оптико-электронной системой 10.
Применим количественное условие отсутствия оптической связи между оптико-электронной системой 10 и низколетящей целью 13 для оценки соотношения величин этих двух параметров:  или
или  откуда следует
откуда следует

где  - угловой коэффициент наклона прямой линии.
- угловой коэффициент наклона прямой линии.
Выражение (4) является условием отсутствия оптической связи. При помощи пакета MachCAD 14.0 рассчитаем и изобразим поверхность (см. фиг. 5) в системе координат (Vц, ωц, r), соответствующую математической модели (4). Для этого запишем соответствие переменных математической модели (4) и переменных пакета MachCAD 14.0: Vц~х, ωс~у, r~z.
Как видно из фиг. 5 выражению (4) соответствует линейно-гиперболическая поверхность, которая характеризуется двумя свойствами:
- если задать Vц=const, то величина минимального расстояния r между экстраполированной трассой пролета цели 13 и оптико-электронной системой 10 будет уменьшаться по гиперболическому закону при росте скорости ωс вращения датчиков оптико-электронной системы 10;
- если задать ωс=const, то величина минимального расстояния r между экстраполированной трассой пролета цели 13 и оптико-электронной системой 10 будет увеличиваться линейно при росте скорости Vц полета цели 13.
Указанные свойства проявляются в зоне потери оптической связи (изображена на фиг. 5) с низколетящей целью 13. Зона расположена между поверхностью (4) и плоскостью (r=0). Свойства указывают на противоборство в сокращении расстояния r, которое традиционно в оптико-электронных системах пытаются сократить при помощи увеличения скорости ωс вращения датчиков. Покажем невысокую эффективность такого подхода на примере анализа основных характеристик оптико-электронной системы RAV-165-3 HD из таблицы: ωс=100 град/с=1,75 рад/с; Vц=550 км/ч=152,78 м/с.
Подставим характеристики в выражение (4), получим: r≤Vц/ωc=152,78/1,75=87,30 м.
Из результата следует, что если цель 13 будет пролетать мимо оптико-электронной системы RAV-165-3 HD на расстоянии r<87,30 м (и ближе) со скоростью Vц=550 км/ч, то возникнет зона потери оптической связи.
Скорость Vц=550 км/ч не характерна для боевых беспилотных вертолетов, поэтому зададимся: Vц=200 км/ч=55,56 м/с. Получим, что зона потери оптической связи возникнет при r<31,75 м.
Увеличение скорости ωс вращения датчиков оптико-электронной системы позволит сократить рассчитанные значения расстояния r в два раза, но устранить эффект возникновения потери оптической связи такой подход не способен.
Предложенный способ непрерывной оптической связи с низколетящей целью позволяет устранить эффект возникновения потери оптической связи, но при одном условии, которое следует из приведенного примера расчетов и фиг. 1: комплект устройств кабель-корд 8, гондола 9 с оптико-электронной системой 10, квадрокоптер 11 должны функционировать в одном из двух следующих режимах:
1) Режим удаленного сопровождения цели 13, при котором комплект устройств 8, 9, 10, 11 связан с источником питания 6 через кабель корд 8. При обнаружении выполнения неравенства ωс≤ωцm или возможности потери оптической связи с низколетящей целью 13 электронная вычислительная машина 3 выдает команду на отстрел кабеля-корда 8 от гондолы 9. Выдает команду на свободный полет квадрокоптера 11 с гондолой 9 и оптико-электронной системой 10 от низколетящей цели 13 на необходимое расстояние, при котором соблюдается неравенство ωс≥ωцm. Режим выполняется при условии отсутствия второго мобильного поста воздушного наблюдения 14, которому можно временно передать сопровождение цели 13. Режим соответствует пункту 1 формулы изобретения.
2) Режим удаленного сопровождения цели 13, при котором комплект устройств 8, 9, 10, 11 связан с источником питания 6 через кабель-корд 8. При обнаружении выполнения неравенства ωс≤ωцm или возможности потери оптической связи с низколетящей целью 13 электронная вычислительная машина 3 выдает команду на посадку гондолы 9 и квадрокоптера 11 на мобильную платформу-автомобиль 2 или команду на свободный полет квадрокоптера 11. Режим выполняется при наличии второго мобильного поста воздушного наблюдения 14, которому временно передается сопровождение цели 13. Режим соответствует совокупности пунктов 1 и 2 формулы изобретения.
Примечание: указанные режимы можно не применять, если емкость аккумулятора квадрокоптера 11 достаточна для обеспечения длительного по времени полета без потребления питания через кабель-корд 8.
Пример реализации способа непрерывной оптической связи с низколетящей целью показывает, что изобретение может быть реализовано при современном уровне развития техники и промышленности.
Промышленная применимость
Предложенный способ непрерывной оптической связи с низколетящей целью в ближней зоне точки стояния мобильного поста воздушного наблюдения или зенитно-ракетного комплекса обеспечивает непрерывность во времени процесса сопровождения низколетящих целей, которые пытаются на высоких угловых скоростях уйти от этого сопровождения. Способ может быть реализован с использованием малых по массе оптико-электронных систем, с малой инерцией сервоприводов оптико-электронных систем, за счет уменьшения массы оптики, оперативного изменения расположения оптико-электронных систем в пространстве при помощи сочлененных с ними электрических квадрокоптеров. Квадрокоптеры под управлением аппаратуры мобильного поста воздушного наблюдения или зенитно-ракетного комплекса оперативно увеличивают расстояние до низколетящей цели, что приводит к непрерывной оптической связи с низколетящей целью.
Способ может быть эффективно применен для борьбы с низколетящими боевыми, беспилотными вертолетами, предназначенными для уничтожения самих зенитно-ракетных комплексов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2018 |
|
RU2713645C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2007 |
|
RU2361235C1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| КОРАБЕЛЬНАЯ ПУСКОВАЯ УСТАНОВКА | 2004 |
|
RU2256582C1 |
| Зенитный ракетный комплекс | 2017 |
|
RU2651533C1 |
| СИСТЕМА ЗАЩИТЫ КОРАБЛЯ ОТ НИЗКОЛЕТЯЩИХ СРЕДСТВ ВОЗДУШНОГО НАПАДЕНИЯ | 2004 |
|
RU2285632C2 |
| АВТОМАТИЗИРОВАННАЯ ФОРТИФИКАЦИОННАЯ РАКЕТНАЯ УСТАНОВКА | 2014 |
|
RU2591561C2 |
| Способ контроля результатов боевой стрельбы зенитных комплексов и машина для его реализации | 2023 |
|
RU2818895C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ СТРЕЛЬБЫ ГРУППЫ ПЕРЕНОСНЫХ ЗЕНИТНО-РАКЕТНЫХ КОМПЛЕКСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289083C2 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2748133C1 |

Изобретение относится к автоматике и вычислительной технике и может быть использовано при построении систем и комплексов противовоздушной обороны тактического звена управления, особенно для обнаружения и сопровождения скоростных, маневренных, низколетящих целей при помощи оптико-электронных систем. Способ непрерывной оптической связи оптико-электронной системы с низколетящей целью состоит в постоянном контроле величины максимальной угловой скорости низколетящей цели. При обнаружении превышения этой скорости ωцm над величиной угловой скорости вращения ωс датчиков оптико-электронной системы (ωцm≥ωc) совершают маневр самой оптико-электронной системой в пространстве и увеличивают расстояние r между оптико-электронной системой и наблюдаемой целью. Кроме этого, ориентируют на цель и подключают к сопровождению низколетящей цели второй мобильный пост воздушного наблюдения, в зоне видимости оптико-электронной системы которого находится точка стояния первого мобильного поста воздушного наблюдения. Технический результат – обнаружение и сопровождение низколетящей цели без потери оптической связи за счет использования динамических свойств подвижных квадрокоптеров или других беспилотных летательных аппаратов, на которых установлены легкие оптико-электронные системы. 1 з.п. ф-лы, 5 ил., 1 табл.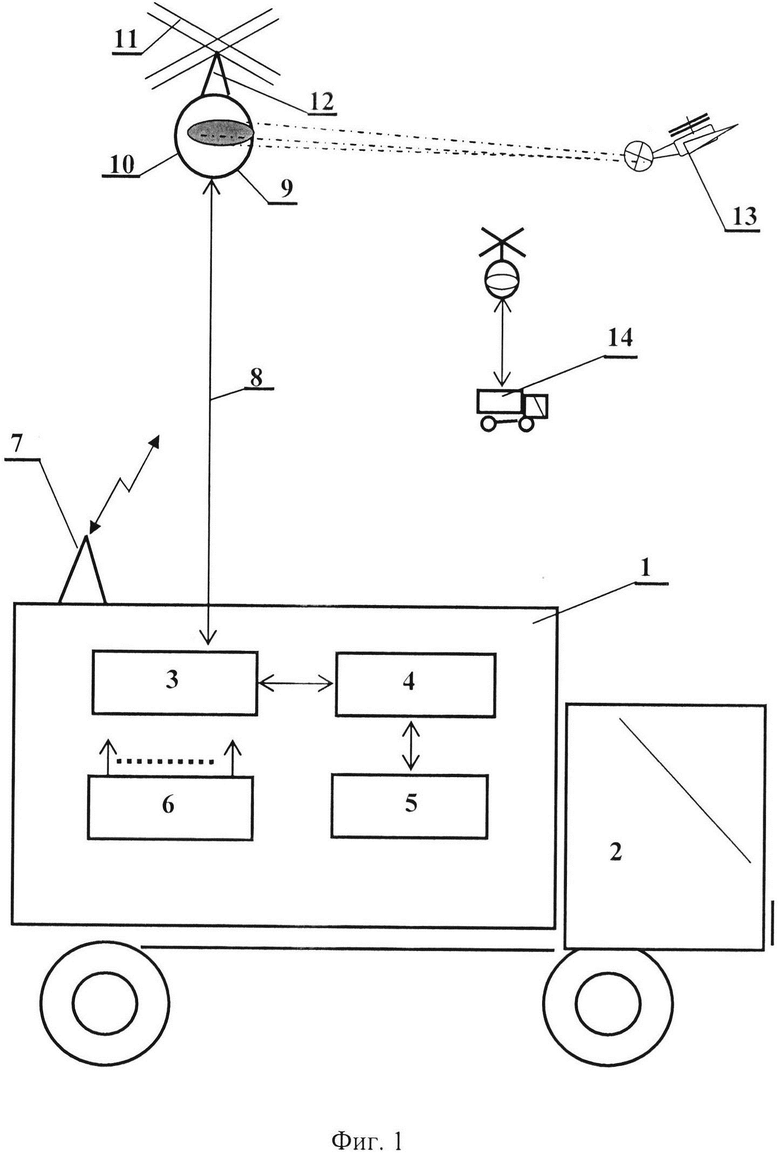
1. Способ непрерывной оптической связи с низколетящей целью, отличающийся тем, что при помощи мобильного поста воздушного наблюдения и его оптико-электронной системы обнаруживают и сопровождают низколетящую цель, измеряют расстояние до цели и линейную скорость полета Vц низколетящей цели, предсказывают (экстраполируют) направление полета низколетящей цели и определяют величину минимального расстояния r от оптико-электронной системы до низколетящей цели, рассчитывают максимальную угловую скорость перемещения ωцm=Vц/r низколетящей цели относительно оптико-электронной системы, сравнивают с максимальной угловой скоростью вращения датчиков ωс оптико-электронной системы, при выполнении неравенства ωс≤ωцm, заблаговременно маневрируют оптико-электронной системой в пространстве, тем самым увеличивают величину фактического расстояния r, за счет чего снижают максимальную угловую скорость ωцm низколетящей цели, тем самым устраняют зону потери оптической связи с низколетящей целью.
2. Способ по п. 1, отличающийся тем, что при выполнении неравенства ωс≤ωцm подключают к сопровождению низколетящей цели второй мобильный пост воздушного наблюдения, в зоне видимости оптико-электронной системы которого находится точка стояния первого мобильного поста воздушного наблюдения, тем самым обеспечивают увеличение расстояния r от второй оптико-электронной системы до низколетящей цели, за счет чего снижают максимальную угловую скорость ωцm низколетящей цели, тем самым обнаруживают и сопровождают низколетящую цель без потери оптической связи, непрерывно во времени, внутри всей зоны ответственности противовоздушной обороны.
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2007 |
|
RU2361235C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| CN 108333584 A, 27.07.2018. | |||

