Область техники
Изобретение относится к автоматике и вычислительной технике и может быть использовано при построении систем и комплексов противовоздушной обороны тактического звена управления, а именно для обнаружения низколетящих целей, которые, маскируясь в складках местности, предназначены для уничтожения основных вооружений противовоздушной обороны: мобильных радиолокационных станций, мобильных пунктов управления и мобильных пусковых установок.
Уровень техники
Известен зенитно-ракетный комплекс тактического звена управления (войсковой), содержащий мобильную радиолокационную станцию, бортовую электронную вычислительную машину (Автоматизированное рабочее место оператора управления воздушным движением, патент ОАО «НПП Рубин» RU №2219586 С2, от 20.12.03 г., МКИ7 G06F 19/00// G06F 165:00, G08G 5/00, авторы: О.Л.Пархоменко, А.Д.Васильев и др.).
Недостаток применения известного комплекса (аналога) заключается в обнаружении и сопровождении цели только при помощи радиолокационных станций, работающих в активном режиме излучения сигнала, что приводит к обнаружению радиолокационных станций противником и их уничтожению. Это приводит в свою очередь к потере боеспособности зенитно-ракетного комплекса или его уничтожению при помощи противорадиолокационных ракет.
Для повышения живучести зенитно-ракетных комплексов необходим режим работы радиолокационных станций по обнаружению целей на предельных дальностях работы станций с последующим их молчанием. Но при этом цель будет потеряна для поражения ее зенитно-ракетным комплексом. К самым трудно обнаруживаемым целям можно отнести низколетящие цели. Кроме этого, низколетящие цели, предназначенные для уничтожения зенитно-ракетных комплексов, являются, как правило, беспилотными боевыми вертолетами. Беспилотные боевые вертолеты характеризуются малыми размерами (не более 2 м), малой высотой полета (до 0,5 м), вариациями скорости полета (от зависания до 400 км/ч), использованием малых складок рельефа местности, русел рек и ручьев, строений и деревьев для скрытного (от луча локатора) подлета на близкое расстояние к зенитно-ракетному комплексу (Табачук И.С., Ташкеев Л.Л. Угрозы с предельно малых высот. Журнал «Воздушно-космическая оборона» №1, 2007 г., с.50-57). Фактически локация таких целей наземными радиолокационными станциями даже в активном режиме постоянного излучения не имеет успеха.
Известен способ обнаружения и сопровождения низколетящих целей, при котором радиолокационные станции располагают на соответствующих беспилотных вертолетах, которые поднимают над позицией зенитно-ракетного комплекса на высоту до одного километра, обрабатывают на бортовых электронных вычислительных машинах радиолокационные сигналы, поступающие от радиолокационных станций, обнаруживают низколетящую цель, рассчитывают на бортовых электронных вычислительных машинах азимутальные углы, расстояния до низколетящей цели и углы места (Табачук И.С., Ташкеев Л.Л. Угрозы с предельно малых высот. Воздушно-космическая оборона. №1, с.50-57, 2007). К достоинству способа можно отнести уверенное обнаружение подвижных низколетящих целей типа самолетов. Беспилотные боевые вертолеты могут зависать в одной точке и менять направление полета на 180°. При использовании этого способа цель будет обнаруживаться только во время ее перемещения. К недостатку следует отнести активный режим излучения сигнала радиолокационных станций, расположенных на соответствующих беспилотных вертолетах и, как следствие, их обнаружение на больших расстояниях и уничтожение при помощи противорадиолокационных ракет.
Наиболее близким по технической сущности к заявляемому, предлагаемому изобретению (прототипом) является способ обнаружения и сопровождения низколетящих целей, при котором зенитно-ракетный комплекс на сухопутном транспортном средстве устанавливают в зоне ответственности противовоздушной обороны, обрабатывают на бортовой электронной вычислительной машине радиолокационные сигналы, поступающие от радиолокационной станции, обнаруживают низколетящую цель на границе зоны ответственности противовоздушной обороны, рассчитывают на бортовой электронной вычислительной машине азимутальные углы, расстояния до низколетящей цели и углы места, передают эту информацию на бортовую оптико-электронную систему, установленную на зенитно-ракетном комплексе, тем самым нацеливают бортовую оптико-электронную систему на низколетящую цель, отключают радиолокационную станцию, обрабатывают видеосигналы низколетящей цели, поступающие от бортовой оптико-электронной системы (Информационная система «Ракетная техника»: Зенитный ракетный комплекс «Avenger», Василин Н.Я., Гуревич А.Л. Зенитные ракетные комплексы. - Мн.: OOO «Попурри», 2002 - 464 с.).
Современные зенитно-ракетные комплексы малой дальности, например: «Avenger» американской фирмы «Boeing Aerospace Company», «Crotale NG» французской компании «Thales Air Defense», «Pansyr-S1» (заказчик разработки комплекса - Объединенные Арабские Эмираты), разработка «Конструкторского бюро приборов» г.Тула, - предназначены для обнаружения, сопровождения и уничтожения воздушных целей, и в том числе низколетящих целей, в зоне ответственности войсковой противовоздушной обороны.
Для успешного решения этой задачи путем обнаружения целей на предельных дальностях работы радиолокационных станций с последующим их молчанием новейшие зенитно-ракетные комплексы оснащены оптико-электронными системами, которые без излучения радиоволн (как у локаторов), в пассивном режиме, при любых погодных условиях, ночью и днем позволяют в пределах прямой видимости, получив информацию о цели (азимутальные углы, расстояния до низколетящей цели и углы места) от радиолокационных станций, обнаруживать и сопровождать низколетящие цели от предельных дальностей до минимальных расстояний до пусковой установки.
Отличительной особенностью зенитно-ракетных комплексов малой дальности является компактное расположение оптико-электронной системы, радиолокационной станции обзора и целеуказания с фазированной антенной решеткой, бортовых электронных вычислительных машин, пусковой установки на одном сухопутном транспортном средстве (автомобильном шасси). Комплексы оснащаются коммуникационным оборудованием, обеспечивающим прием информации о целеуказании и отображение воздушной обстановки, поступающей от вышестоящих командных пунктов противовоздушной обороны.
Оптико-электронные системы (на примере зенитно-ракетного комплекса «Avenger») состоят из нескольких устройств: прицела оптического диапазона СА-562 фирмы CAI, тепловизора Magnavox AN/VLR-1 (или IR-18), лазерного дальномера.
Таким образом, в новейших зенитно-ракетных комплексах имеется оптико-электронная система, жестко связанная (установлена) с пусковой установкой зенитно-ракетного комплекса. Оптико-электронные системы зарубежных производителей имеют высокие характеристики по дальности, по чувствительности и не могут быть повторены российскими производителями из-за технологического отставания в этой области.
Недостатком указанного способа обнаружения и сопровождения низколетящих целей является то, что при сложном микрорельефе местности для обнаружения и сопровождения низколетящей цели, прячущейся от радиолокационных станций в складках местности и меняющей направление своего движения (беспилотные боевые вертолеты) при обнаружении облучения от радиолокационной станции, необходимо очень большое количество оптико-электронных систем или равное им количество зенитно-ракетных комплексов для обеспечения контроля над всеми участками поверхности земли, закрытыми от прямой видимости оптико-электронных систем, расположенных на каждом зенитно-ракетном комплексе. Такое конструкторское решение по размещению оптико-электронной системы, очевидно, принято по аналогии с размещением радиолокационной станции непосредственно на подвижном сухопутном транспортном средстве совместно с пусковой установкой для обеспечения автономной боеспособности одного зенитно-ракетного комплекса. Необходимо отметить тот факт, что стоимость радиолокационной станции в 5-10 раз выше, чем стоимость оптико-электронной системы. Стоимость самого зенитно-ракетного комплекса в 100-1000 раз выше, чем стоимость оптико-электронной системы.
Поэтому техническое решение по использованию оптико-электронных систем, установленных на зенитно-ракетных комплексах, для обеспечения контроля над всеми участками поверхности земли, закрытыми от прямой видимости этих оптико-электронных систем, является явно не эффективным.
Сущность изобретения
Предлагаемый способ обнаружения и сопровождения низколетящих целей позволяет обнаруживать и сопровождать низколетящие цели за всеми неровностями поверхности земли, в том числе инженерными сооружениями и растительностью (деревьями), при этом обнаружение осуществляется минимальным количеством оптико-электронных систем, установленных на зенитно-ракетных комплексах. Способ позволяет обнаруживать цели на дальних подступах к точке стояния даже одного зенитно-ракетного комплекса при помощи его радиолокационной станции, переводить станцию в режим молчания и далее обнаруживать и сопровождать низколетящую цель во всей зоне ответственности зенитно-ракетного комплекса. Тем самым повышается надежность и скрытность противовоздушной обороны.
В известном способе обнаружения и сопровождения низколетящих целей зенитно-ракетный комплекс на сухопутном транспортном средстве устанавливают в зоне ответственности противовоздушной обороны, обрабатывают на бортовой электронной вычислительной машине радиолокационные сигналы, поступающие от радиолокационной станции, обнаруживают низколетящую цель на границе зоны ответственности противовоздушной обороны, рассчитывают на бортовой электронной вычислительной машине азимутальные углы, расстояния до низколетящей цели и углы места, передают эту информацию на бортовую оптико-электронную систему, установленную на зенитно-ракетном комплексе, тем самым нацеливают бортовую оптико-электронную систему на низколетящую цель, отключают радиолокационную станцию, обрабатывают видеосигналы низколетящей цели, поступающие от бортовой оптико-электронной системы.
Целью данного изобретения является решение новой научно-технической задачи, а именно обнаружение и сопровождение низколетящей цели на дальних подступах к точке стояния зенитно-ракетного комплекса, обеспечение скрытности работы радиолокационных станций, сокращение количества радиолокационных станций и зенитно-ракетных комплексов для обнаружения и сопровождения низколетящей цели во всей зоне ответственности зенитно-ракетных комплексов, для чего (m≥1) выносных оптико-электронных систем устанавливают на возвышенностях, берегах и в руслах рек, в оврагах, препятствующих обнаружению низколетящей цели при помощи радиолокационной станции и бортовой оптико-электронной системы, рассчитывают на бортовой электронной вычислительной машине направления возможного появления низколетящей цели для каждой выносный оптико-электронной системы, нацеливают выносные оптико-электронные системы на расчетные направления появления низколетящей цели, обрабатывают видеосигналы низколетящей цели на электронных вычислительных машинах выносных оптико-электронных систем, передают азимутальные углы, расстояния до низколетящей цели и углы места от m оптико-электронных систем на бортовую электронную вычислительную машину зенитно-ракетного комплекса, тем самым обнаруживают и сопровождают низколетящую цель внутри всей зоны ответственности противовоздушной обороны.
Способ обнаружения и сопровождения низколетящих целей может быть реализован так, что зенитно-ракетный комплекс на сухопутном транспортном средстве устанавливают в зоне ответственности противовоздушной обороны, (m≥1) выносных оптико-электронных систем устанавливают на возвышенностях, берегах и в руслах рек, в оврагах, препятствующих обнаружению низколетящей цели при помощи радиолокационной станции и бортовой оптико-электронной системы, обрабатывают на бортовой электронной вычислительной машине зенитно-ракетного комплекса радиолокационные сигналы, поступающие от радиолокационной станции, обнаруживают низколетящую цель на границе зоны ответственности противовоздушной обороны, рассчитывают на бортовой электронной вычислительной машине азимутальные углы, расстояния до низколетящей цели и углы места, передают эту информацию на бортовую оптико-электронную систему, установленную на зенитно-ракетном комплексе, тем самым нацеливают бортовую оптико-электронную систему на низколетящую цель, отключают радиолокационную станцию, обрабатывают видеосигналы низколетящей цели, поступающие от бортовой оптико-электронной системы, рассчитывают на бортовой электронной вычислительной машине направления возможного появления низколетящей цели для каждой выносной оптико-электронной системы, нацеливают выносные оптико-электронные системы на расчетные направления появления низколетящей цели, обрабатывают видеосигналы низколетящей цели на электронных вычислительных машинах выносных оптико-электронных систем, передают азимутальные углы, расстояния до низколетящей цели и углы места от m оптико-электронных систем на бортовую электронную вычислительную машину зенитно-ракетного комплекса, тем самым обнаруживают и сопровождают низколетящую цель внутри всей зоны ответственности противовоздушной обороны.
Задача обнаружения и сопровождения низколетящих целей решена без использования большого количества зенитно-ракетных комплексов, в составе которых находятся бортовые оптико-электронные системы, так как опасные пути пролета низколетящих целей перекрываются для обнаружения не целыми комплектами зенитно-ракетных комплексов, а их составными частями - выносными оптико-электронными системами. Кроме этого, выносные оптико-электронные системы удалены от комплексов и приближены к возможным, удобным для реализации скрытного от локаторов пролета низколетящей цели к объекту обороны или зенитно-ракетному комплексу, поэтому требования к дальности обнаружения цели, разрешающей способности выносной оптико-электронные системы, ее чувствительности могут быть снижены по сравнению с аналогичными характеристиками бортовых зарубежных оптико-электронных систем, устанавливаемых на зарубежных зенитно-ракетных комплексах.
Устранен существенный недостаток в использовании конструкции (компановки) современных зенитно-ракетных комплексов, вызывающий трудности в их применении для борьбы с низколетящими целями, заключающийся в отсутствии возможности отделить оптико-электронные системы от комплексов и приблизить их к удаленным от комплексов опасным (невидимым локатору) участкам рельефа земной поверхности, которые могут быть использованы низколетящими летательными аппаратами для прорыва противовоздушной обороны тактического звена управления.
Для обнаружения и сопровождения низколетящих целей предлагается применить, кроме оптико-электронных систем, находящихся (закрепленных) на зенитно-ракетных комплексах, выносные (дополнительные) оптико-электронные системы, которые должны быть передвижными, мобильными и автономными как по энергообеспечению, так и по обработке информации о целях. Эти оптико-электронные системы должны использоваться преимущественно для решения поставленной тактико-технической боевой задачи.
Перечень чертежей
На фиг.1 изображена (условно) схема противовоздушной обороны объекта, обозначены: зенитно-ракетный комплекс 1, выносная оптико-электронная система 2, низколетящая цель 3 (беспилотный боевой вертолет).
На фиг.2 изображен (условно) зенитно-ракетный комплекс 1, обозначены: сухопутное транспортное средство 4, пусковая установка 5, радиолокационная станция 6, бортовая оптико-электронная система 7, бортовая система спутниковой навигации 8, бортовая электронная вычислительная машина 9.
На фиг.3 изображена схема выносной оптико-электронной системы 7, обозначены: система спутниковой навигации 10, привод 11, прицел оптического диапазона 12, тепловизор 13, лазерный дальномер 14, электронная вычислительная машина 15, радиомодем 16, блок автономного электропитания 17, радиостанция 18.
Пример варианта выполнения изобретения
Способ обнаружения и сопровождения низколетящих целей реализуется следующим образом. Поясним операции: «…зенитно-ракетный комплекс на сухопутном транспортном средстве устанавливают в зоне ответственности противовоздушной обороны, (m≥1) выносных оптико-электронных систем устанавливают на возвышенностях, берегах и в руслах рек, в оврагах, препятствующих обнаружению низколетящей цели при помощи радиолокационной станции и бортовой оптико-электронной системы». Расчет (экипаж) войскового зенитно-ракетного комплекса 1, или воинское подразделение (взвод, рота) зенитно-ракетных комплексов 1, получает боевое задание по обороне объекта и цифровую карту местности (изображена условно на фиг.1). Служащие штаба указывают на этой карте координаты точки стояния зенитно-ракетного комплекса 1, границы объекта обороны, координаты точек установки выносных оптико-электронных систем 2, зоны невидимости участков местности радиолокационной станцией 6 и бортовой оптико-электронной системой 7 (из состава войскового зенитно-ракетного комплекса 1, см. фиг.2), границу зоны ответственности зенитно-ракетного комплекса 1. Координаты точек установки выносных оптико-электронных систем 2 определяются таким образом, чтобы сделать видимыми зоны невидимости участков местности радиолокационной станцией 6 и бортовой оптико-электронной системой 7. Исходя из этого расчет зенитно-ракетного комплекса 1 получает необходимое количество выносных оптико-электронных систем 2. Зенитно-ракетный комплекс 1 транспортируется до объекта обороны транспортным вертолетом или самолетом (на большие расстояния) или доходит на него своим ходом, используя сухопутное транспортное средство 4. По цифровой карте местности, загруженной в бортовую электронную вычислительную машину 9, и при помощи бортовой системы спутниковой навигации 8 находится точка стояния, в которой расчет производит развертывание зенитно-ракетного комплекса 1 и производит проверку работы пусковой установки 5, радиолокационной станции 6, бортовой оптико-электронной системы 7. В это время выносные оптико-электронные системы 2 (на фиг.1 три штуки) доставляются транспортным средством или своим ходом в районы точек установки, координаты которых записаны заранее в память электронных вычислительных машин 15 выносных оптико-электронных систем 2. Производится включение блока автономного электропитания 17 и координаты установки каждой выносной оптико-электронной системы 2 определяются автоматически, при помощи системы спутниковой навигации 10. Персонал должен визуально проверить зону видимости выносной оптико-электронной системы 2 с указанной на бумажной распечатке цифровой карты зоной и скорректировать положение точки установки оптико-электронной системы 2. Эти координаты определяются системой спутниковой навигации 10, записываются в электронную вычислительную машину 15, которая (по команде персонала) через радиомодем 16, радиостанцию 18 передает их в бортовую электронную вычислительную машину 9 зенитно-ракетного комплекса 1. Таким образом, уточняются координаты точек установки оптико-электронных систем 2 (в рассматриваемом примере m=3).
Во время установки оптико-электронных систем 2 зенитно-ракетный комплекс 1 использует радиолокационную станцию 6, бортовую оптико-электронную систему 7 и осуществляет сканирование пространства зоны ответственности, обнаружение и сопровождение воздушных целей в соответствии с известным способом.
Поясним операции: «…обрабатывают на бортовой электронной вычислительной машине зенитно-ракетного комплекса радиолокационные сигналы, поступающие от радиолокационной станции, обнаруживают низколетящую цель на границе зоны ответственности противовоздушной обороны, рассчитывают на бортовой электронной вычислительной машине азимутальные углы, расстояния до низколетящей цели и углы места, передают эту информацию на бортовую оптико-электронную систему, установленную на зенитно-ракетном комплексе, тем самым нацеливают бортовую оптико-электронную систему на низколетящую цель…».
Допустим, что после установки выносных оптико-электронных систем 2 радиолокационная станция 6 получает радиолокационный сигнал о низколетящей цели 3 (на фиг.1 беспилотном боевом вертолете) или вышестоящее звено противовоздушной обороны передает войсковому звену информацию о направлении приближения средства воздушного нападения. Информация поступает в бортовую электронную вычислительную машину 9, которая рассчитывает азимутальные углы, расстояния до низколетящей цели 3 и углы места. Результаты обработки передаются на приводы пусковой установки 5, которая занимает положение в пространстве, соответствующее направлению на низколетящую цель 3 с необходимым упреждением. Бортовая оптико-электронная система 7, закрепленная на пусковой установке 5, также принимает направление на низколетящую цель 3. При помощи привода происходит настройка фокусных расстояний прицела оптического диапазона и тепловизора (на фиг.2 не показаны) из состава бортовой оптико-электронной системы 7.
Поясним операции: «…отключают радиолокационную станцию, обрабатывают видеосигналы низколетящей цели, поступающие от бортовой оптико-электронной системы…»
После захвата низколетящей цели 3 на больших расстояниях (до 30-50 км) в радиолокационной станции 6 отключают режим излучения сигнала (активный режим) для обеспечения скрытности зенитно-ракетного комплекса 1 от средств радиоразведки противника и противорадиолокационных ракет с головками самонаведения.
Сопровождение низколетящей цели 3 в этот промежуток времени осуществляется только при помощи бортовой оптико-электронной системы 7, которое на больших расстояниях может быть успешным только при высотах полета низколетящей цели 3 более 100 м. Производится обработка видео, тепловых образов низколетящей цели 3 в бортовой электронной вычислительной машине 9, сверка с образами и характеристиками целей из каталога возможных целей. При этом возможен запрос к цели по системе «свой-чужой» для уточнения принадлежности.
Поясним операции: «…рассчитывают на бортовой электронной вычислительной машине направления возможного появления низколетящей цели для каждой выносный оптико-электронной системы, нацеливают выносные оптико-электронные системы на расчетные направления появления низколетящей цели…».
Бортовая электронная вычислительная машина 9 вычисляет траекторию полета цели и рассчитывает направления возможного появления низколетящей цели 3 для каждой выносной оптико-электронной системы 2. Далее через радиомодем и радиостанцию зенитно-ракетного комплекса 1 информация о направлениях (азимутальные углы) передается на радиостанцию 18, радиомодем 16 и электронную вычислительную машину 15, которая через привод 11 нацеливает (разворачивает) прицел оптического диапазона 12 и тепловизор 13 в направлении возможного появления низколетящей цели 3. При помощи привода 11 происходит настройка фокусных расстояний прицела оптического диапазона 12 и тепловизора 13 выносной оптико-электронной системы 2 на расчетные расстояния появления низколетящей цели 3 (см. фиг.3).
Поясним операции: «…обрабатывают видеосигналы низколетящей цели на электронных вычислительных машинах выносных оптико-электронных систем, передают азимутальные углы, расстояния до низколетящей цели и углы места от m оптико-электронных систем на бортовую электронную вычислительную машину зенитно-ракетного комплекса…»
На фиг.1 низколетящая цель 3 (беспилотный боевой вертолет) пытается по дну оврага, вдоль ручья достичь позиции атаки зенитно-ракетного комплекса 1 и поразить его с близкого расстояния ракетой. На излучине ручья находится выносная оптико-электронная система 2, нацеленная на низовье ручья. Она, в зависимости от времени суток, в светлое время при помощи прицела оптического диапазона 12 и тепловизора 13 в темное время обнаруживает низколетящую цель 3. Производится обработка видео, тепловых образов низколетящей цели 3 в бортовой электронной вычислительной машине 15, сверка с образами и характеристиками целей из каталога возможных целей. Лазерным дальномером 14 замеряется расстояние до низколетящей цели 3. При помощи привода 11 происходит поворот сенсоров выносной оптико-электронной системы 2 на необходимые углы для сопровождения низколетящей цели 3. На электронной вычислительной машине 15 производится расчет характеристик низколетящей цели 3: азимутальные углы, расстояния до низколетящей цели 3 и углы места, скорость и ускорение. Эти характеристики передаются через радиомодем 16, радиостанцию 18 в бортовую электронную вычислительную машину 9 зенитно-ракетного комплекса 1, расчет которого осуществляет подготовку к стрельбе и уничтожает низколетящую цель 3.
Таким образом, способ обнаружения и сопровождения низколетящих целей имеет три стадии реализации:
- радиолокационная станция 6 обнаруживает низколетящую цель 3 на границе зоны ответственности противовоздушной обороны;
- бортовая оптико-электронная система 7 сопровождает низколетящую цель 3 на дальних подступах к точке стояния зенитно-ракетного комплекса 1;
- бортовая оптико-электронная система 7 и выносные оптико-электронные системы 2 осуществляют сопровождение низколетящей цели 3 на средних и ближних подступах к точке стояния зенитно-ракетного комплекса 1 и в том числе в зонах невидимости участков местности для радиолокационной станции 6 и бортовой оптико-электронной системы 7.
Низколетящая цель 3, изображенная в правом углу фиг.1, достигает удобной позиции для стрельбы по зенитно-ракетному комплексу 1, облетая лес вдоль его опушки, и имеет много шансов выполнить задачу. Это свидетельствует о необходимости разработки геоинфромационного подхода к определению и расчету границ зон невидимости участков местности радиолокационной станцией 6 и бортовой оптико-электронной системой 7 путем применения оперативной автоматизированной обработки актуальных крупномасштабных спутниковых снимков поверхности земли. Эти снимки содержат свежую информацию о растительности, строениях и рельефе.
Одним из важнейших условий практической реализации способа является правильный выбор или проектирование выносной оптико-электронной системы 2, к которой можно предъявить следующие технические требования:
- питание от автономного источника (аккумулятора или бензогенератора) и, как следствие, ограничение по энергопотреблению;
- малые габариты и масса для обеспечения удобной доставки в точку установки по пересеченной местности и для обеспечения скрытности (маскировки на местности);
- дальность действия (обнаружения и сопровождения) низколетящей цели не менее 5 км для прицела оптического диапазона 12, тепловизора 13, лазерного дальномера 14;
- угол обзора 20 по горизонту (Г) не менее 180°;
- угол обзора 20 по вертикали (В) не менее 120°;
- скорость слежения за целью (Vc) не менее 60 град/с;
- ускорение слежения за целью (aс) не менее 100 град/с2;
-диапазон рабочих температур (Δtр) от -50°С до+50°С;
- требования к стабилизации линии визирования не предъявляются (статическое рабочее положение прибора).
В военной авиации (самолеты, вертолеты, беспилотные летательные аппараты) практически и в большинстве современных изделий используют основные составные части оптико-электронных систем 2 (прицел оптического диапазона 12, тепловизор 13, лазерный дальномер 14), которые характеризуются самыми малыми габаритами, энергопотреблением, весом. В таблице приведены характеристики авиационных оптико-электронных систем российского и зарубежного производства. (Волков В.Г. Авиационные приборы ночного видения. Специальная техника. №3, с.2-20. №4, с.2-12, 2006)

Сравнение характеристик авиационных оптико-электронных систем отечественных и зарубежных производителей показывает отставание отечественных изделий по габаритам, массе и другим техническим характеристикам, что подтверждает актуальность решения задачи обнаружения и сопровождения низколетящих целей системным путем. Из перечня отечественных изделий, в соответствии с выдвинутыми техническими требованиями, для построения выносных оптико-электронных систем 2 (за основу) можно выбрать изделие ГОЭС520. Изделие ГОЭС520 содержит гиростабилизированную платформу, на которой установлены прицел оптического диапазона 12 и тепловизор 13. Требуется конструкторская доработка изделия для исключения платформы, так как выносные оптико-электронные системы 2 работают только после установки на грунт, вышки, крыши строений или высокие деревья, что исключает требования гиростабилизации. Таким образом, вес оптико-электронной системы 2 может быть уменьшен в несколько раз до необходимых значений, обеспечивающих требования мобильности.
Для перемещения оптико-электронных систем 2 в точки установки могут быть использованы вертолеты, мотоциклы и другие транспортные средства.
Таким образом, способ обнаружения и сопровождения низколетящих целей может быть практически реализован на имеющихся отечественных технических и программных средствах или путем использования имеющихся технических средств при условии уменьшения их весогабаритных характеристик.
Промышленная применимость
Предложенный способ обнаружения и сопровождения низколетящих целей на дальних подступах к точке стояния зенитно-ракетного комплекса обеспечивает скрытность работы радиолокационных станций, сокращает количество радиолокационных станций и зенитно-ракетных комплексов для обнаружения и сопровождения низколетящей цели во всей зоне ответственности зенитно-ракетных комплексов путем установки выносных оптико-электронных систем на возвышенностях, берегах и в руслах рек, в оврагах, препятствующих обнаружению низколетящей цели при помощи радиолокационной станции и бортовой оптико-электронной системы.
Способ может быть эффективно применен для борьбы с низколетящими боевыми, беспилотными вертолетами, предназначенными для уничтожения самих зенитно-ракетных комплексов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2018 |
|
RU2713645C1 |
| СТАЦИОНАРНЫЙ КОМПЛЕКС ОБНАРУЖЕНИЯ И ПОРАЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2019 |
|
RU2734267C1 |
| СПОСОБ НЕПРЕРЫВНОЙ ОПТИЧЕСКОЙ СВЯЗИ С НИЗКОЛЕТЯЩЕЙ ЦЕЛЬЮ | 2019 |
|
RU2715499C1 |
| Способ автоматического комплексного управления защитой летательного аппарата от средств противовоздушной обороны | 2022 |
|
RU2799611C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2000 |
|
RU2191973C2 |
| ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2021 |
|
RU2797976C2 |
| ЗЕНИТНАЯ РАКЕТНО-ПУШЕЧНАЯ БОЕВАЯ МАШИНА | 1999 |
|
RU2156943C1 |
| МОБИЛЬНЫЙ ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2003 |
|
RU2253820C2 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ ВЫПОЛНЕНИЮ ЗАДАЧ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2012 |
|
RU2497063C2 |
Изобретение может быть использовано при построении комплексов систем противовоздушной обороны для обнаружения низколетящих целей. Достигаемым техническим результатом изобретения является обеспечение скрытности работы радиолокационных станций, сокращение количества радиолокационных станций и зенитно-ракетных комплексов для обнаружения и сопровождения низколетящей цели во всей зоне ответственности зенитно-ракетных комплексов путем установки выносных оптико-электронных систем на возвышенностях, берегах и в руслах рек, в оврагах, препятствующих обнаружению низколетящей цели при помощи радиолокационной станции и бортовой оптико-электронной системы. Способ может быть эффективно применен для борьбы с низколетящими боевыми беспилотными вертолетами, предназначенными для уничтожения самих зенитно-ракетных комплексов. 3 ил., 1 табл.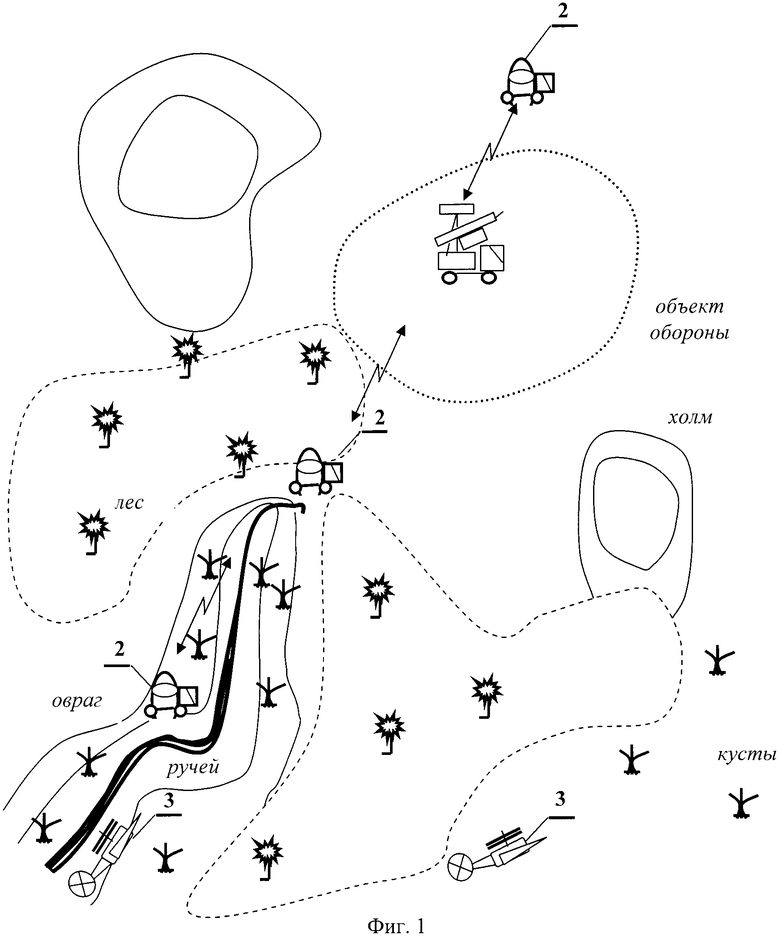
Способ обнаружения и сопровождения низколетящих целей, при котором зенитно-ракетный комплекс на сухопутном транспортном средстве устанавливают в зоне ответственности противовоздушной обороны, обрабатывают на бортовой электронной вычислительной машине радиолокационные сигналы, поступающие от радиолокационной станции, обнаруживают низколетящую цель на границе зоны ответственности противовоздушной обороны, рассчитывают на бортовой электронной вычислительной машине азимутальные углы, расстояния до низколетящей цели и углы места, передают эту информацию на бортовую оптико-электронную систему, установленную на зенитно-ракетном комплексе, тем самым нацеливают бортовую оптико-электронную систему на низколетящую цель, отключают радиолокационную станцию, обрабатывают видеосигналы низколетящей цели, поступающие от бортовой оптико-электронной системы, отличающийся тем, что (m≥1) выносных оптико-электронных систем устанавливают на возвышенностях, берегах и в руслах рек, в оврагах, препятствующих обнаружению низколетящей цели при помощи радиолокационной станции и бортовой оптико-электронной системы, рассчитывают на бортовой электронной вычислительной машине направления возможного появления низколетящей цели для каждой выносной оптико-электронной системы, нацеливают выносные оптико-электронные системы на расчетные направления появления низколетящей цели, обрабатывают видеосигналы низколетящей цели на электронных вычислительных машинах выносных оптико-электронных систем, передают азимутальные углы, расстояния до низколетящей цели и углы места от m оптико-электронных систем на бортовую электронную вычислительную машину зенитно-ракетного комплекса, тем самым обнаруживают и сопровождают низколетящую цель внутри всей зоны ответственности противовоздушной обороны.
| ТАБАЧУК И.С., ТАШКЕЕВ Л.Л | |||
| Угрозы с предельно малых высот | |||
| Журнал «Воздушно-космическая оборона», 2007, №1, с.50-57 | |||
| МОБИЛЬНЫЙ ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2003 |
|
RU2253820C2 |
| ЗЕНИТНЫЙ РАКЕТНЫЙ КОМПЛЕКС | 2002 |
|
RU2241193C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВОЙСКОВОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА БЛИЖНЕГО ДЕЙСТВИЯ | 1985 |
|
RU2102772C1 |
| US 3946640 A, 30.03.1976 | |||
| US 5131602 A, 21.07.1991 | |||
| US 5062596 A, 05.11.1991. | |||

