Изобретение относится к области систем слежения за подвижными объектами, в том числе с подвижного основания, и может быть использовано в оптических системах промышленного назначения, навигационных системах, системах слежения за космическими объектами, системах управления заходом на посадку и других системах аналогичного назначения.
Известна система сопровождения, состоящая из радиолокационной станции и устройства наведения и стабилизации ([1], стр.132, рис. 2.26), в которой радиолокационная станция определяет положение объекта относительно оси диаграммы направленности антенны. Сигналы о положении объекта подаются на вход устройства наведения и стабилизации, и оно осуществляет разворот радиолокационной станции до тех пор, пока объект не окажется на оси диаграммы направленности. При сопровождении этой системой низколетящего объекта из-за суммирования в противофазе отраженного от поверхности и излученного антенной сигнала происходит ослабление сигнала, облучающего объект. В результате повышается вероятность срыва сопровождения объекта.
Известна также радиолокационная система ([2], стр. 570, рис. 21.12), содержащая приемник, передатчик, антенный переключатель, синхронизатор, системы сопровождения по дальности и угловым координатам и систему гиростабилизации. Системы сопровождения по угловым координатам выдают на двигатели поворота антенны сигналы, пропорциональные положению объекта относительно оси диаграммы направленности антенны, и двигатели поворачивают антенну до совмещения объекта с осью диаграммы направленности. Система гиростабилизации позволяет компенсировать качки носителя. Двигатели вместе с системой гиростабилизации образуют устройство наведения и стабилизации. Недостатком этой системы также является повышение вероятности срыва сопровождения низколетящего объекта.
В патенте [3] описана следящая система, содержащая последовательно соединенные оптико-электронный блок (ОЭБ), блок определения координат, первый преобразователь координат, коммутатор, корректирующее устройство, второй преобразователь координат, исполнительное устройство, третий преобразователь координат. Выход исполнительного устройства кинематически связан с оптико-электронным блоком, а выход третьего преобразователя координат соединен со вторым входом блока определения координат. Второй вход коммутатора служит для управления от внешних систем. Первый преобразователь координат служит для пересчета из измерительной системы координат ОЭБ в стабилизированную сферическую систему координат. Второй преобразователь координат служит для пересчета из стабилизированной сферической системы координат в нестабилизированную сферическую систему координат исполнительного устройства (ИУ). Третий преобразователь координат служит для пересчета из нестабилизированной сферической системы координат ИУ в измерительную систему координат ОЭБ. В этой системе оптико-электронный блок и блок определения координат образуют в совокупности оптико-электронный пеленгатор, последовательно соединенные первый преобразователь координат, коммутатор, корректирующее устройство, второй преобразователь координат выполняют функции устройства формирования координат наведения, а исполнительное устройство с учетом того, что управляющие сигналы содержат информацию о качках носителя, выполняет функции наведения и стабилизации.
В плохих метеоусловиях эта система имеет невысокую дальность действия, при неточном целеуказании в ней затруднен автоматический захват объекта на сопровождение, а в случае срыва сопровождения нет дублирующего канала, позволяющего уменьшить вероятность потери объекта.
Наиболее близкой к заявляемому техническому решению является система сопровождения по патенту [4]. Она состоит из последовательно соединенных оптико-электронного пеленгатора (ОЭПл), блока сравнения (БС), первого коммутатора и блока фильтрации (БФ), последовательно соединенных блока памяти (БП), второго коммутатора и сумматора, последовательно соединенных локационного пеленгатора (ЛПл) и формирователя логики режимов (ФЛР), а также устройства наведения и стабилизации (УНС). Локационный и оптико-электронный пеленгаторы механически соединены между собой и имеют кинематическую связь с выходным валом устройства наведения и стабилизации. Второй выход ЛПл подключен ко второму входу второго коммутатора, третий вход которого соединен с первым выходом ОЭПл. Второй выход второго коммутатора связан со входом УНС, чей второй выход подключен ко второму входу сумматора, выходом соединенного со входом ОЭПл. Выход БФ соединен со вторым входом первого коммутатора, второй выход которого подключен ко входу блока памяти. Второй выход ОЭПл соединен со вторым входом ФЛР, чьи первый и второй выходы подключены соответственно к управляющим входам первого и второго коммутаторов. Устройство наведения и стабилизации может быть реализовано в этой системе на базе пневматических, гидравлических, электрических [5], в т.ч. на базе двух- и трехкоординатных моментных двигателей и т.п. сервоприводов. При необходимости работы при больших углах возвышения или существенных значениях амплитуды качек, когда система сопровождения может потерять устойчивость в результате возникновения положительных перекрестных связей из-за несовпадения измерительной и исполнительной систем координат, УНС может быть дополнено преобразователями координат. Например, УНС может представлять последовательно соединенные преобразователь координат из измерительной системы координат (СК) пеленгатора в стабилизированную сферическую СК, блок динамической коррекции, преобразователь координат из стабилизированной сферической СК в исполнительную СК сервопривода (эти три блока образуют устройство формирования координат наведения), сам сервопривод и преобразователь координат ошибки сервопривода из исполнительной СК в измерительную. Сервопривод содержит управляющую часть (сумматоры для сигналов обратной связи, компенсации и т.п., блоки для динамической коррекции) и исполнительный блок (усилитель мощности, двигатель, соединенный с помощью механических передач с датчиками скорости, угла и нагрузкой - пеленгаторами). Выходной вал привода наведения при этом является выходным валом устройства наведения и стабилизации. Если же преобразователь координат из измерительной системы координат (СК) пеленгатора в стабилизированную сферическую СК и блок динамической коррекции входят в состав пеленгаторов, то из состава УНС они должны быть исключены. При этом реализация и построение преобразователей координат предполагалась в соответствии с [6]. Блок динамической коррекции при известных требованиях к системе сопровождения предлагалось сформировывать по правилам, изложенным в [7], с реализацией аппаратной части на основе методов, приведенных в [8].
Недостатком указанной системы является то, что, во-первых, локационный и оптико-электронный пеленгаторы имеют существенно разные передаточные функции, что при использовании общего для обеих систем устройства формирования координат наведения (УФКН) позволяет адаптировать его лишь к худшему из них, а во-вторых, к оптико-электронной системе предъявляются специфические требования по допустимой скорости перемещения изображения сопровождаемого объекта относительно фотоприемника (см. [9], стр.209-212), которые должны находить свое отражение в характеристиках работы сервопривода для работы локационного пеленгатора несущественных. То есть либо вследствие меньшей добротности привода увеличивается ближняя зона, обеспечиваемая локационным пеленгатором, либо же при более высокой добротности и колебательности привода увеличивается ближняя и сокращается дальняя зона, обеспечиваемая оптико-электронным пеленгатором.
Техническим результатом предлагаемого решения является увеличение зон сопровождения комплексированной системы при одновременном повышении точности определения координат оптико-электронным пеленгатором.
Указанный результат достигается за счет того, что в следящую систему, содержащую коммутатор, механически соединенные оптико-электронный пеленгатор и локационный пеленгатор, формирователь логики режимов, первый вход которого соединен с первым выходом оптико-электронного пеленгатора, а второй - с первым выходом локационного пеленгатора, выход же соединен со входом управления коммутатора, первое устройство формирования координат наведения и последовательно соединенные управляющая часть и исполнительный блок, первым выходом кинематически связанный с пеленгаторами, введено второе устройство формирования координат наведения, причем входы первого и второго устройств формирования координат наведения соединены со вторыми выходами соответственно оптико-электронного и локационного пеленгаторов, первый вход управляющей части соединен с выходом формирователя логики режимов, второй ее вход через первую группу контактов коммутатора подключен к первому выходу первого либо второго устройства формирования координат наведения, третий ее вход через вторую контактную группу коммутатора подключен к одному из вторых выходов тех же устройств, четвертый и пятый ее входы соединены соответственно со вторым и третьим выходами исполнительного блока.
Управляющая часть представляет собой последовательно соединенные первый сумматор, корректирующее устройство позиционной части, первую схему плавного ввода ошибки, второй сумматор, первое корректирующее устройство скоростной части, третий сумматор, второе корректирующего устройство скоростной части, выходом соединенное с первым выходом УЧ (первым входом исполнительного блока), а также содержит вторую схему плавного ввода ошибки, выходом соединенную со вторым входом второго сумматора, последовательно соединенные дифференцирующий фильтр и третью схему плавного ввода ошибки, выходом связанную со вторым входом третьего сумматора. При этом четвертый и пятый входы УЧ (второй и третий выходы исполнительного блока) соединены соответственно со вторым входом первого и третьим входом второго сумматоров, вторые входы схем плавного ввода ошибки и корректирующих устройств связаны с первым входом УЧ (выходом формирователя логики режимов), а вход дифференцирующего фильтра соединен со входом второй схемы плавного ввода ошибки, соединенным с третьим входом УЧ, первый вход первого сумматора соединен со вторым входом УЧ.
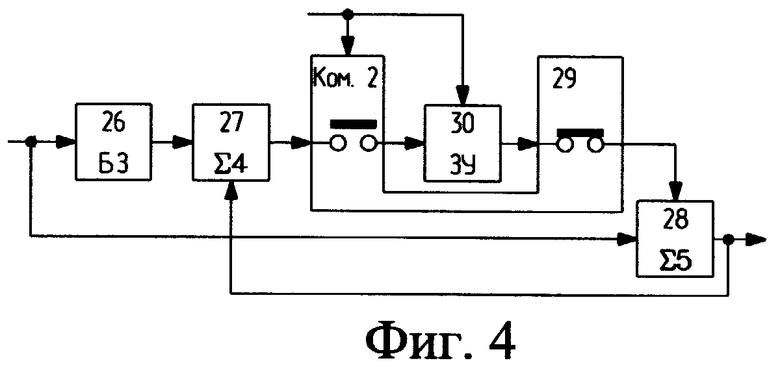
Схема плавного ввода ошибки содержит последовательно соединенные блок задержки, четвертый сумматор, второй коммутатор и запоминающее устройство, а также пятый сумматор, выходом соединенный со вторым входом четвертого сумматора и выходом схемы плавного ввода ошибки, при этом первый вход пятого сумматора соединен со входом блока задержки и первым входом схемы плавного ввода ошибки, его второй вход подключен через второй выход и второй вход второго коммутатора к выходу запоминающего устройства, чей второй вход соединен с третьим входом второго коммутатора и вторым входом схемы плавного ввода ошибки. При этом запоминающее устройство выполнено с возможностью разряда в режиме хранения.
Все используемые для реализации заявляемого устройства блоки являются известными либо могут быть реализованы на базе известных блоков известными методами.
Локационный и оптико-электронный пеленгаторы могут быть использованы аналогичными прототипу. Формирователь логики режимов может быть реализован на базе логических микросхем или цифровых вычислительных устройств. Коммутатор реализуется на реле, герконах, полупроводниковых ключах и т.п. Варианты реализации управляющей части, исполнительного блока, устройств формирования координат наведения приведены соответственно на фиг.2, 3, 5. При этом: корректирующие устройства могут быть спроектированы, исходя из требований к динамике и колебательности сервопривода по методам, изложенным в [7], и реализованы на базе полученных математических зависимостей по схемам, приведенным в [8]. Преобразователи координат могут быть выполнены в соответствии с [6], прототипом, фиг.5, 6. Схемы плавного ввода ошибки могут реализовываться в аналоговой форме как устройства выборки-хранения либо как указано на фиг.4, а в цифровой форме - путем реализации сплайн-функций, косинусоид, полиномиальных функций и т.п.
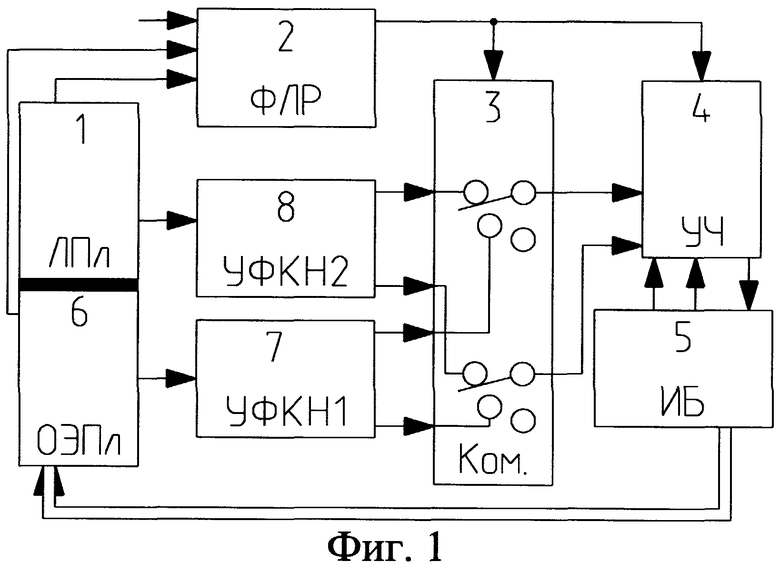
Для пояснения устройства и работы следящей системы приводятся иллюстрации: на фиг.1 изображена функциональная схема следящей системы (для одного канала); на фиг.2 - возможный вариант построения управляющей части сервопривода; на фиг.3 - вариант исполнительного блока; на фиг.4 - схема плавного ввода ошибки; на фиг.5 - состав устройства формирования координат наведения; на фиг.6 - преобразователь (отклонений) из измерительной в стабилизированную систему координат; на фиг.7 - блок-схема формирователя логики режимов, на фиг.8 - преобразователь для расчета угла скрутки измерительной системы координат относительно стабилизированной.
На фиг.1 схематично изображена функциональная схема предлагаемой системы для одного канала наведения. Система содержит локационный пеленгатор 1, последовательно соединенные формирователь логики режимов 2 и коммутатор 3, последовательно соединенные управляющую часть (УЧ) 4, исполнительный блок (ИБ) 5, оптико-электронный пеленгатор 6 и первое устройство формирования координат наведения (УФКН1) 7, а также второе устройство формирования координат наведения (УФКН2) 8. При этом оптико-электронный и локационный пеленгаторы механически соединены друг с другом, их первые выходы соединены с первым и вторым входами ФЛР 2 соответственно, а вторые выходы - со входами первого и второго УФКН соответственно, входы УЧ соединены соответственно: первый - с выходом ФЛР; второй - через первую группу контактов коммутатора подключен либо к первому выходу УФКН1, либо к первому выходу УФКН2; третий - через вторую группу контактов коммутатора подключен или ко второму выходу первого или ко второму выходу второго устройств формирования координат наведения; четвертый соединен со вторым, а пятый - с третьим выходами исполнительного блока. В качестве варианта исполнения управляющей части 4 использованы последовательно соединенные первый сумматор 9, корректирующее устройство позиционной части (КУПЧ) 10, первая схема плавного ввода ошибки (СПВО1)11, второй сумматор 12, первое корректирующее устройство скоростной части (КУСЧ1) 13, третий сумматор 14, второе корректирующее устройство скоростной части (КУСЧ2) 15, выходом соединенное с первым выходом управляющей части, а также вторую схему плавного ввода ошибки (СПВО2) 16, выходом соединенную со вторым входом второго сумматора 12, и последовательно соединенные дифференцирующий фильтр (ДФ) 17 и третью схему плавного ввода ошибки (СПВО3) 18, выходом связанную со вторым входом третьего сумматора 14. При этом вторые входы схем плавного ввода ошибки 11, 16, 18 и корректирующих устройств 10, 13, 15 связаны с первым входом управляющей части, первый вход первого сумматора 9 соединен со вторым входом управляющей части, вход дифференцирующего фильтра 17 соединен с первым входом второй схемы плавного ввода ошибки 16, связанным с третьим входом управляющей части, четвертый и пятый входы управляющей части соединены соответственно со вторым входом первого 9 и третьим входом второго сумматора 12.
При описании работы предлагаемой системы предполагается, что передача однородных массивов данных (элементов видеосигнала, релейных команд, наборов координат) осуществляется по каналам связи (шинам), использующим, например, временное, частотное, кодовое разделение сигналов, т.е. того или иного рода мультиплексирование. Кроме того, поскольку устройство, обеспечивающее синхронизацию работы системы, может находиться как в любом из блоков системы, так и быть конструктивно выделенным, этот аспект работы в дальнейшем не рассматривается и подразумевается, что работа блоков синхронизирована. Следует также отметить, что входы и выходы блоков показаны как функциональные, физически же реализация блоков может иметь от одного (и более) входа-выхода, например, соединенного с общей шиной данных или многоабонентским мультиплексным каналом обмена, или локальной сетью, объединяющей блоки, и т.п. Если особо не оговорено, подразумевается, что информация (сигналы, команды и т.п.), не вырабатываемая данным каналом, поступает на ее блоки (субблоки) из надсистемы, в которую входит рассматриваемая следящая система, и второго канала системы.
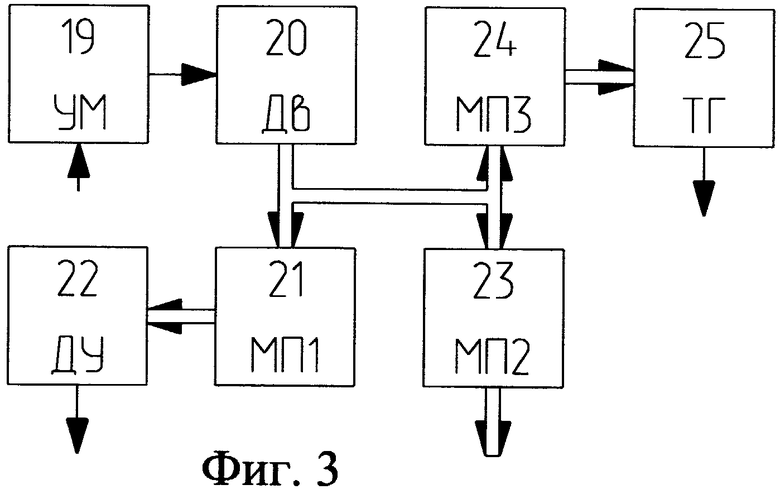
Работа системы осуществляется следующим образом (рассматривается канал по одному направлению, работа второго канала аналогична). Предположим, что в начальный момент времени управление сервоприводом (управляющая часть 4 и исполнительный блок 5) осуществляется с использованием информации, формируемой локационным пеленгатором 1. ЛПл имеет, как правило, диаграмму направленности более широкую, чем поле зрения оптико-электронного пеленгатора 6, а также большую дальность действия по большинству из объектов, которые могут быть взяты на сопровождение. Признак наличия сопровождения с первого выхода локационного пеленгатора 1 поступает на формирователь логики режимов 2 (второй вход). При отсутствии аналогичного сигнала на первом входе ФЛР с первого входа оптико-электронного пеленгатора 6 либо при наличии запрета на сопровождение оптико-электронным пеленгатором 6, поступающего, например, из внешней системы на третий вход ФЛР, формирователь логики режимов 2 выдает со своего выхода команду управления на коммутатор 3 и управляющую часть 4. В этом случае первый выход коммутатора подключается через его третий вход к первому выходу УФКН2, а второй выход коммутатора через пятый его вход - ко второму выходу второго устройства формирования координат наведения 8. При этом первый и второй выходы коммутатора 3 соединены соответственно со вторым и третьим входами управляющей части 4. В управляющей части формируется сигнал управления исполнительным блоком 5 сервопривода. Этот сигнал с выхода УЧ (выхода КУСЧ2 15) поступает на вход исполнительного блока 5 (вход усилителя мощности 19 - см. фиг.3). В усилителе мощности (УМ) сигнал усиливается по току и при необходимости по напряжению. После этого усиленный сигнал с выхода УМ поступает на вход двигателя 20. Выходной вал двигателя через механические передачи (МП1-МП3) 21, 23, 24 кинематически связан с датчиком угла (ДУ) 22, пеленгаторами 1 и 6, тахогенератором (ТГ) 25 соответственно. Выход МП2 является, таким образом, первым выходом ИБ, осуществляющим разворот пеленгаторов (или их приемопередающих частей) в направлении сопровождаемого объекта. Выход датчика угла 22 является вторым выходом ИБ. С него сигнал о положении выходного вала исполнительного блока 5 поступает на второй вход первого сумматора 9 (четвертый вход УЧ, см. фиг.1, фиг.2). Таким образом, на первом сумматоре из сигнала с первого выхода УФКН2, поступающего через коммутатор 3 на первый вход первого сумматора 9 (второй вход УЧ), вычитается сигнал обратной связи по положению ИБ. Выход тахогенератора 25 является третьим выходом ИБ. Сигнал с выхода тахогенератора 25 поступает на третий вход второго сумматора 12 (пятый вход УЧ). Тем самым обеспечивается замыкание отрицательной обратной связью скоростной части (скоростного контура) сервопривода. Для лучшего качества работы сервопривода управляющей частью используются компенсирующие сигналы по скорости (с третьего входа УЧ через СПВО2 16 на второй вход второго сумматора 12) и по ускорению (через дифференцирующий фильтр 17 и СПВО3 18 на второй вход третьего сумматора 14).
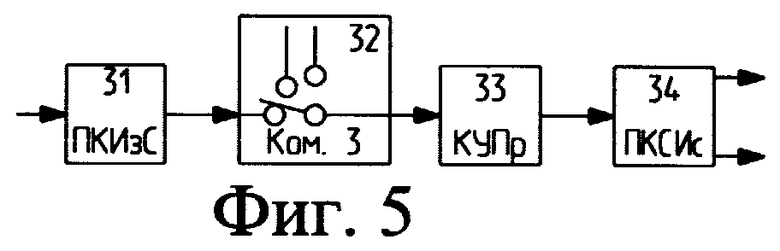
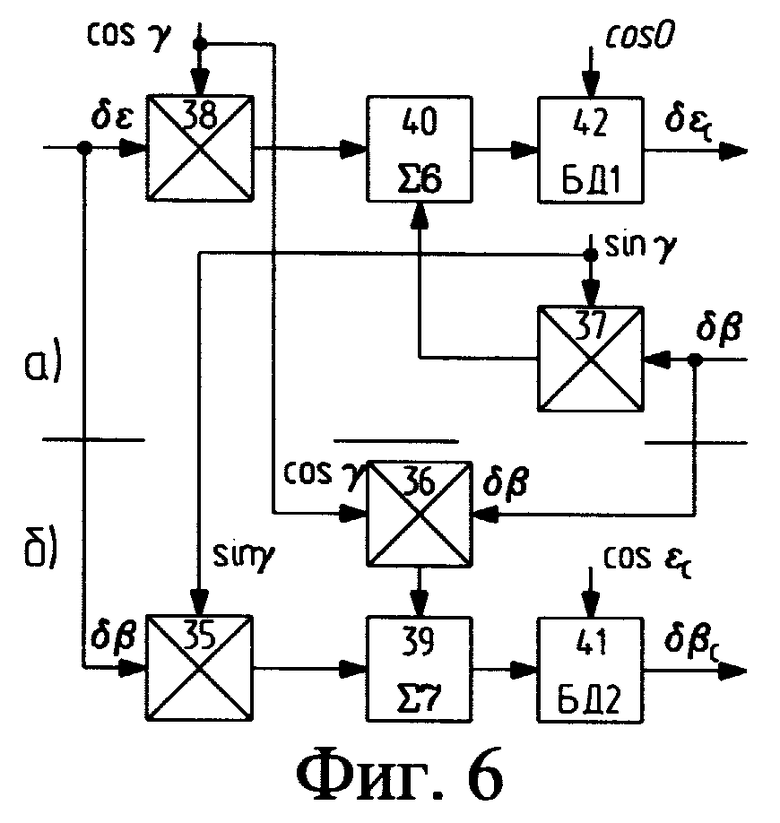
Со второго выхода локационного пеленгатора 1 сигнал поступает на вход второго устройства формирования координат наведения 8 (вход преобразователя из измерительной в стабилизированную систему координат - ПКИзС 31, фиг.5). В нем реализовываются следующие зависимости:

где δε, δβ - сигналы рассогласования в измерительной системе координат;
δεс, δβс - сигналы рассогласования в стабилизированной системе координат;
γ - угол скрутки измерительной системы координат, см. [6], стр. 138;
εc - угол места объекта в стабилизированной системе координат.
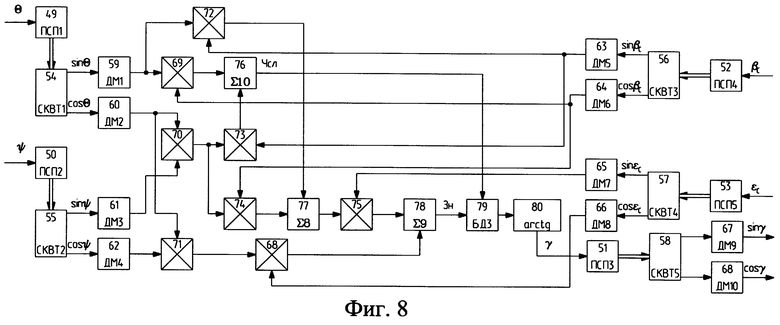
Блок-схема ПКИзС приведена на фиг.6 и состоит из перемножителей 35-38, шестого 40 и седьмого 39 сумматоров, первого 42 и второго 41 блоков деления. В зоне а) фиг.6 указаны блоки, необходимые для угломестного (в блок деления вместо косинуса от угла места выдается cos0=1), а в зоне б) - блоки, нужные для работы азимутального канала. Блок-схема для определения угла скрутки ϒ по указанным в [6] зависимостям приведена на фиг.8. Этот преобразователь выполнен с использованием позиционных следящих приводов (ПСП) 49-53, синусно-косинусных вращающихся трансформаторов (СКВТ) 54-58, демодуляторов (ДМ) 59-66, перемножителей 68-75, сумматоров 76-78, блока деления 79 и нелинейного блока, реализующего функцию арктангенса 80. При этом сервоприводы и СКВТ могут быть выполнены аналогично описанному в [6], стр.255-259, реализация демодуляторов описана, например, в книге [12], стр.80, 81, 141-145, нелинейный блок может быть сформирован на базе операционных усилителей (см., например, [8]) либо, учитывая, что функции являются тригонометрическими, получен с помощью ПСП с СКВТ в качестве датчика обратной связи, аналогично описанному в [6], стр.258, 259, для углов Q и Ф. Сигнал с выхода ПКИзС 31 поступает через третий коммутатор 32 на вход корректирующего устройства пространственного контура (КУПр) 33, где реализуется закон управления с целью улучшения качества регулирования. Необходимость третьего коммутатора 32, отсутствующего в прототипе, обусловлена возможностью наличия в системе режимов, когда информация о положении объекта не вырабатывается ни одним из пеленгаторов (например, отработка целеуказания, полуавтоматическое [10] или инерционное [11] сопровождение). Напряжение с выхода корректирующего устройства 33 поступает на вход преобразователя из стабилизированной в исполнительную систему координат (ПКСИс) 34. В блоке 34 осуществляется пересчет углов из стабилизированной сферической системы координат (СССК) в нестабилизированную сферическую систему координат (НССК) исполнительного устройства по зависимостям (2) и определение производных от нестабилизированных углов:
где:
εн, qн - углы наведения исполнительного блока в НССК;
εc, βс - углы наведения исполнительного устройства в СССК;
α, ψ, θ - углы курса, крена и тангажа носителя соответственно.
Производные наиболее просто получить, если пересчет углов осуществляется с помощью электромеханических преобразователей (см. [6], стр. 258, 259). В этом случае достаточно в позиционные сервоприводы (ПСП), формирующие нестабилизированные углы, добавить датчики скорости, кинематически связанные с соответствующими выходными валами. Можно их и получить прямым дифференцированием сигналов углов, например, путем пропускания через дифференцирующие фильтры. Так что для каждого канала ПКСИс имеет два выхода: первый - по углу, второй - по скорости, которые являются соответствующими выходами УФКН.
Работа системы, когда управление сервоприводом осуществляется с использованием информации о положении сопровождаемого объекта относительно оптической оси оптико-электронного пеленгатора, происходит аналогично вышеописанному, с тем отличием, что формирователь логики режимов 2 при наличии на своем первом входе сигнала, подтверждающего наличие сопровождения объекта оптико-электронным пеленгатором 6 (выдается с его первого выхода), выдает команду о наличии соответствующего режима со своего выхода на первые входы коммутатора 3 и управляющей части 4. При этом ко второму входу УЧ через первый выход и второй вход коммутатора 3 подключен первый выход первого устройства формирования координат 7, а к третьему входу УЧ через второй выход и четвертый вход коммутатора подключен второй выход УФКН1. На вход первого устройства формирования координат наведения 7 поступает сигнал со второго выхода оптико-электронного пеленгатора 6. УФКН1 исполнено аналогично УФКН2. При этом КУПр проектируется с учетом динамических характеристик оптико-электронного пеленгатора. Ввод начальных условий в КУПр в процессе переключения сервопривода на управление с одного УФКН на другой может быть выполнен аналогично описанному в [10] (необходимые для этого связи не отражены на фиг.1 и в формуле изобретения, т.к. не являются существенными для заявляемого технического решения). Однако в силу того, что к сервоприводу в контуре с оптико-электронным пеленгатором предъявляются специфические требования по плавности работы, замена в пространственном контуре второго устройства формирования координат 8 на первое 7 при смене пеленгаторов не является достаточной для качественной работы системы в целом без перестройки характеристик сервопривода. Вследствие необходимости обеспечения высокой плавности движения выходного вала привод в этом режиме должен иметь низкую колебательность, даже если снижение колебательности повлечет за собой некоторое снижение добротности в скоростном и позиционном контурах сервопривода. Отсутствие необходимой плавности перемещения влечет за собой снижение точности определения координат из-за "смазывания" изображения и искажения образа объекта, а также снижение максимальной дальности действия в результате потери контраста изображения объекта. Чтобы изменить передаточные функции корректирующих устройств 10, 13, 15, на их вторые входы с первого входа управляющей части подается сигнал управления, по которому перестраивается их структура, либо вместо одного набора фильтров (линейных или нелинейных) подключается другой.
Тем не менее даже при введении начальных условий в КУПр при изменении контуров пространственного слежения сигнал на третьем входе управляющей части может иметь разрыв. Соответственно, могут появиться разрывы в сигналах на выходе корректирующих устройств. Такого рода разрывы могут вызвать колебательный переходный процесс при переходе с режима на режим, результатом которого может быть срыв сопровождения объекта. Во избежание этого используются схемы плавного ввода ошибки 11, 16, 18. Они выполняют следующие операции. В период, предшествующий изменению режима работы, на первый вход (связанный с первым входом СПВО) пятого сумматора 28 (см. фиг.4) поступает текущий входной сигнал, а второй вход этого сумматора подключен к выходу запоминающего устройства (ЗУ) 30 с помощью нормально замкнутых контактов второго коммутатора 29. Для подготовки к смене режимов в четвертом сумматоре 27 определяется разность выходного (поступает на второй вход ∑4, связанный с выходом ∑5) и задержанного в блоке задержки (БЗ) 26 сигналов. Вход БЗ соединен с первым входом СПВО. Величина задержки устанавливается не менее времени срабатывания коммутатора 3 и не более удвоенной этой величины. Поскольку время задержки достаточно мало, при плавно изменяющемся сигнале величина на выходе четвертого сумматора практически равна нулю. Запоминающее устройство 30 при этом находится в режиме хранения, а его первый вход отключен от выхода четвертого сумматора нормально разомкнутыми контактами второго коммутатора 29.
При изменении режима работы (формирователь логики режимов 2 вырабатывает соответствующий сигнал - ИР, который поступает через второй вход СПВО на второй вход ЗУ и вход управления вторым коммутатором) запоминающее устройство 30 переводится в состояние записи, коммутатором 29 его вход подключается к выходу четвертого 27, а выход отключается от второго входа пятого сумматора 28 (через второй вход и второй выход второго коммутатора 29). Если между сигналами на первом входе СПВО и его выходе после переключения режима появился разрыв, то на выходе четвертого сумматора 27 будет сформирован сигнал, равный этому разрыву, величина которого и зафиксируется в ЗУ. После снятия команды ИР коммутатор 29 и ЗУ переходят в ранее описанное состояние. При этом в момент переключения на второй вход пятого сумматора 28 поступает сигнал, практически равный величине разности сигналов на входе и выходе СПВО до и сразу после изменения режима. Поэтому на выходе пятого сумматора 28 сразу после снятия команды ИР сигнал будет практически равен тому же сигналу на момент поступления этой команды. Таким образом, на выходе СПВО устраняется ступенчатое изменение сигнала, а кратковременный импульс оказывает на систему, как правило, существенно меньшее возмущающее воздействие, чем ступенчатый сигнал такого же уровня. Для исключения из выходного сигнала СПВО постоянной ошибки запоминающее устройство 30 выполняют так, чтобы абсолютная величина сигнала на его выходе снижалась до нуля с течением времени. Это достигается, например, путем использования устройства выборки-хранения в форме апериодического звена с изменяющейся постоянной времени: малой в режиме записи и большей в режиме хранения, причем для режима хранения постоянная выбирается, по возможности, не слишком большой, чтобы при ожидаемом максимальном уровне разрыва скорость изменения сигнала при разряде не превышала допустимой. При цифровой реализации спад может быть реализован как линейно падающим (реверсивный счетчик), так и более сложным, например косинусоидальным или монотонным полиномиальным с нулевым значением сигнала и его производных в конечной точке периода сброса запомненного значения. Такой сброс рассогласования не вызывает изменения динамических характеристик контура и не ухудшает его устойчивости. Математически СПВО может быть описана зависимостью:

где:
Uсв - значение сигнала на первом входе СПВО;
Ucx - значение сигнала на выходе СПВО;
δU - разрыв сигнала при смене режима;
tИР, tИР-0, tИР+0 - моменты времени: а) смены режима, б) предшествующего смене режима, в) сразу после смены режима;
f(t-tИР) - функция сброса сигнала.
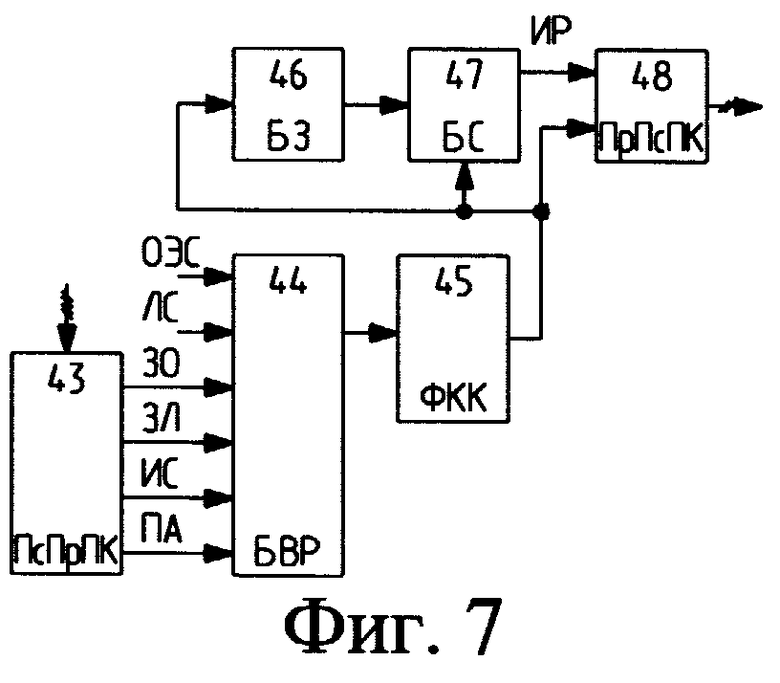
Как уже говорилось, команды на СПВО и корректирующие фильтры управляющей части 4 формируются в формирователе логики режимов 2. Из внешней системы на вход преобразователя последовательных сигналов в параллельные (ПсПрПК) 43, связанный с третьим входом ФЛР, могут поступать, например, сигналы полуавтоматического (ПА) или инерционного (ИР) режимов, запрета работы с оптической системой (30), запрета работы с локационной системой (ЗЛ). С выходов ПсПрПК упомянутые сигналы поступают на соответствующие входы блока выбора режимов (БВР) 44, куда также поступают сигналы о сопровождении объекта оптико-электронным пеленгатором (ОЭС) с первого входа ФЛР и (или) локационным пеленгатором (ЛС) со второго входа ФЛР. Выше указывалось, что команда оптического режима может быть сформирована при наличии сигнала ОЭС и отсутствии каждого из сигналов ЗО, ИС, ПА, а команда локационного режима - при наличии сигнала ЛС и отсутствии каждого из сигналов ЗЛ, ИС, ПА. Таким образом, при наличии обоих сигналов ОЭС и ЛС неопределенность может быть снята наличием сигнала запрета из внешней системы (сигналы ЗО и ЗЛ не должны одновременно отсутствовать). Отсутствие обоих указанных сигналов соответствует команде на управление приводом по информации от внешней системы. В формирователе кодов команд (ФКК) 45 сигналам с выхода БВР, если они выдаются, например, параллельно или логическими единицами в разных битах информационного слова, ставятся в соответствие однозначно различимые уровни или коды. С выхода ФКК сигнал поступает на блок сравнения (БС) 47, блок задержки 46 и преобразователь параллельных сигналов в последовательные (ПрПсПК) 48. Блок задержки работает аналогично описанному ранее блоку в СПВО, и с его выхода сигнал поступает на второй вход блока сравнения 47. Если на входах БС одинаковые сигналы, то сигналу ИР на его выходе присваивается значение логический ноль. В противном случае сигнал ИР равен логической единице. Очевидно, что уровень логической единицы на выходе БС не может удерживаться более чем величина интервала в блоке задержки. В цифровых системах он в пределе может быть уменьшен до величины тактового периода обновления информации. В ПрПсПК, куда на второй вход поступает команда ИР, осуществляют мультиплексирование сигналов с выходов ФКК и БС. Для использования этих сигналов корректирующие устройства, запоминающие устройства и коммутаторы схем плавного ввода ошибки управляющей части 4 должны на своих входах управления иметь дешифраторы (основанные, например, на схемах совпадения), позволяющие реагировать на сигналы управления соответствующим образом.
Таким образом, в предлагаемой системе увеличение зон сопровождения комплексированной системы достигается, во-первых, за счет раздельного формирования динамических контуров пространственного сопровождения объекта локационными или оптическими средствами путем введения дополнительного устройства формирования координат наведения и, во-вторых, перестройкой корректирующих фильтров сервопривода в зависимости от используемых средств пеленгации. При этом во избежание срывов сопровождения при смене пеленгующих средств в сервоприводе применены схемы плавного ввода ошибки, позволяющие уменьшить переходные процессы. Одновременно достигается повышение точности определения координат оптико-электронным пеленгатором как за счет того, что в оптическом режиме сервопривод имеет более высокую плавность движения, так и вследствие плавного уменьшения рассогласования, а следовательно, и скорости перемещения изображения объекта относительно фотоприемника после перехода с локационных на оптические средства пеленгации.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. “Динамика следящих приводов”, под ред. Л.В.Рабиновича, М., “Машиностроение”, 1982 г., стр.132, рис.2.26, аналог.
2. “Радиолокационные устройства”, под ред. В.В.Григорина-Рябова, М., “Советское радио”, 1970 г., стр.570, рис.21.12, аналог.
3. Патент Российской федерации №2168753, МПК7 G 05 D 3/12, 2000 г., аналог.
4. Патент Российской федерации №2197002, МПК7 G 01 S 13/66, 17/66, 2000 г., прототип.
5. Чиликин М.Г., Сандлер А.С. “Общий курс электропривода”, М., “Энергоиздат”, 1981 г.
6. Ривкин С.С. “Стабилизация измерительных устройств на качающемся основании”, М., “Наука”, 1978 г.
7. Бесекерский В.А., Попов Е.П. “Теория систем автоматического регулирования”, М., “Наука”, 1973 г.
8. Тетельбаум И.И., Шнейдер Ю.Р. “400 схем для АВМ”, М., “Энергия”, 1978 г.
9. Грязин Г.Н. “Оптико/электронные системы для обзора пространства: Системы телевидения”, Л., “Машиностроение”, Ленинградское отд-е, 1988 г.
10. Патент Российской федерации №2172010, МПК7 G 05 D 3/12, 2000 г.
11. Патент Российской федерации №2191407, МПК7 G 01 S 17/66, G 05 D 3/12, H 04 N 7/18, 2000 г.
12. “Применение интегральных микросхем. Практическое руководство”, под ред. А. Уильямса, книга 1, М., “Мир”, 1987 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| ИНТЕГРИРОВАННАЯ НАБЛЮДАТЕЛЬНАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2327188C1 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |

Изобретение относится к области систем слежения за подвижными объектами, в том числе с подвижного основания, и может быть использовано в оптических системах промышленного назначения, навигационных системах, системах слежения за космическими объектами, системах управления заходом на посадку и других системах аналогичного назначения. Следящая система содержит определенным образом соединенные локационный пеленгатор, формирователь логики режимов, коммутатор, управляющую часть, исполнительный блок, оптико-электронный пеленгатор, первое и второе устройства формирования координат наведения, при этом оптико-электронный и локационный пеленгаторы механически соединены друг с другом. Техническим результатом предлагаемого решения является увеличение зон сопровождения комбинированной локационной и оптико-электронной системой при одновременном повышении точности определения координат оптико-электронным пеленгатором. 3 з.п. ф-лы, 8 ил.
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| RU 2000128908 А, 10.11.2002 | |||
| US 6233008 В1, 15.05.2001 | |||
| US 5317319 А, 31.05.1994 | |||
| Узел электрического соединения токоведущей шины с выводом электрического аппарата | 1981 |
|
SU1001251A1 |

