Настоящее изобретение относится к области определения местоположения и предотвращения столкновения между передвижной рабочей платформой (ПРП) и транспортным средством для перевозки людей (ТСПЛ).
Наиболее близким аналогом является US 5359542, который относится к системе для определения местоположения самолета в ангаре и для ограничения перемещения множества козловых кранов вокруг самолета, включающей множество подвижных сканеров, которые устанавливают места расположения множества коллинеарных точек вдоль передних кромок крыльев самолета, включая процессорную систему для определения точки пересечения линий, проведенных через коллинеарные точки, причем точка пересечения и линии имеют известное взаимное расположение по отношению к другим частям самолета, по которым процессорная система также определяет места расположения других частей самолета, при этом процессорная система определяет пределы перемещения кранов относительно самолета.
DE 102012006371 относится к способу печати на объекте.
WO 2007101475 относится к автоматизированной системе с подвесным роботом для обработки поверхностей, в частности, самолета, включающей опору Р, состоящую из мостового крана, подвижной тележки на мостовом кране и телескопической мачты, переносимой тележкой и выдвигающейся с нее вниз. Обрабатывающий робот поддерживается мачтой на ее нижнем конце. Система оборудована GPS-средством базирования в помещении, включающим несколько передатчиков, распределенных по высоте на колоннах, закрепленных на основании и независимых от ангара, в котором установлена система обработки, приемники, поддерживаемые телескопической мачтой, и приемники, закрепляемые в заметных точках объекта так, чтобы можно было обнаружить местоположение контрольной точки робота в пространстве обработки, подлежащем замерам, и местоположение заметных точек объекта в указанном пространстве обработки, а также средство для передачи сигналов обнаружения местоположения контрольной точки и заметных точек объекта системе, управляющей опорой и роботом на основании выявленного местоположения и на основании объемной формы объекта, хранящейся в системе управления.
Единственное столкновение между передвижной рабочей платформой и транспортным средством для перевозки людей может привести к значительным материальным потерям, а также быть опасным для людей, находящихся на рабочей платформе.
Наиболее близким аналогом является патент США US 5359542, поскольку он относится к той же области техники и аналогичной проблеме, подлежащей решению.
Отличия настоящего изобретения от US 5359542 являются следующими:
Устройство для генерирования облака точек (1А), представляющего реальную внешнюю форму транспортного средства (1) для перевозки людей, для определения ориентации указанного транспортного средства (1) для перевозки людей в указанном здании, а также для определения относительной ориентации по меньшей мере одной передвижной рабочей платформы (2), причем ориентация указанного транспортного средства (1) для перевозки людей и ориентация указанной передвижной рабочей платформы (2) осуществляется по отношению по меньшей мере к одной известной контрольной точке (R1) здания (4), содержащее:
- по меньшей мере, одну известную контрольную точку (R1) здания (4), являющуюся исходной точкой системы координат с 6 степенями свободы и служащую центральной общей контрольной точкой, и
- по меньшей мере, одно трехмерное сканирующее средство (3) для определения указанной реальной внешней формы указанного транспортного средства (1) для перевозки людей, и
- по меньшей мере, одно стационарное вычислительное средство (6) для генерирования указанного облака точек (1А), представляющего реальную внешнюю форму транспортного средства (1) для перевозки людей, и
- указанное установочное средство (8), которое устанавливает ориентацию с учетом до 6 степеней свободы передвижной рабочей платформы (2) согласно контрольной точке (R2) по отношению к контрольной точке (R1), и
- по меньшей мере один первый процессор (21) для генерирования трехмерной модели (2А), представляющей передвижную рабочую платформу (2), и
- указанный первый процессор (21) для определения положения с учетом до 6 степеней свободы и ориентации указанной трехмерной модели (2А), представляющей указанную передвижную рабочую платформу (2), и
- трехмерное сканирующее средство (3), установочное средство (8), стационарное вычислительное средство (6) и первый процессор (21) соединены между собой через средство связи, и
- указанный первый процессор (21) используется для предотвращения столкновений между передвижной рабочей платформой (2) и транспортным средством (1) для перевозки людей.
Технический эффект этих различий между US 5359542 и настоящим изобретением состоит в генерировании облака точек (1А), представляющего реальную внешнюю форму транспортного средства (1) для перевозки людей. Техника, использующая облако точек, является новой технологией, не доступной на дату подачи US 5359542, и представляет собой значительное усовершенствование, поскольку может дополнительно сканировать выступающие элементы ТСПЛ (1), такие как антенна, что невозможно в US 5359542.
Действительной технической проблемой, подлежащей решению, является создание альтернативного усовершенствованного устройства для предотвращения столкновений между передвижной рабочей платформой (2) и транспортным средством (1) для перевозки людей. Другой проблемой, подлежащей решению, является повышение точности и надежности определения программных ограничений на соответствующие перемещения.
Относительно US 5359542 (также именуемого «патент Боинга») есть следующие значительные отличия:
А) В патенте Боинга поверхность самолета (препятствие) определяется двумя частями, во-первых, «сканированной частью» (распознаванием 4 кромок крыльев с помощью фотоэлементов и определением высоты с помощью визуального указателя, чтобы определить положение самолета в ангаре) и, во-вторых, «другой частью самолета» (чертежи, выполненные с помощью CATIA (computer-aided tridimensional interactive analysis - пакет программ компьютерной интерактивной трехмерной графики, - примеч. перевод.), преобразуются вручную и переводятся в специальные блоки данных для программируемого логического контроллера). В настоящем изобретении вся поверхность самолета определяется за одну сессию сканирования с помощью трехмерного лидара. В результате сессии сканирования получают облако точек. Облако точек автоматически привязывается к стационарно зафиксированным калиброванным контрольным меткам и к ангару.
B) В патенте Боинга специальные блоки данных для программируемого логического контроллера по «другой части самолета», основанные на CATIA модели самолета, требуют для своего создания инженерной проработки, представляющей собой значительную работу по ручному преобразованию данных для каждого отдельного типа самолета (Визуально идентифицировать положение «линий аппарата» и нарезать модель на «линии аппарата» (X); Визуально идентифицировать положение «ватерлиний» (Z) в конкретных местах на обшивке; Вручную спроектировать, рассчитать и создать данные для каждого блока данных (исходная точка круга, начальный радиус, линия привязки, мультипликатор заостренности, начало координат эллипса, значения увеличения эллипса; Вручную осуществить инженерную разработку прикладного программного обеспечения, главным образом основанную на тригонометрии, чтобы рассчитывать расстояния в реальном времени для конкретных участков обшивки; Вручную создать наборы дополнительных данных для различных положений закрылков путем инженерной разработки). В настоящем изобретении последующая обработка результирующего облака точек осуществляется в автоматическом режиме с помощью программного обеспечения независимо от типа самолета (Автоматическое фильтрование облака точек; Автоматическое добавление форм (краевые зоны); Автоматическое создание готовых к использованию полных данных по самолету).
C) В патенте Боинга данные по самолету определяются блоками данных один раз для модели самолета, и те же самые данные всегда используются повторно для того же физического типа самолета. В настоящем изобретении самолет сканируется заново при каждом заезде в ангар.
D) В патенте Боинга принцип обнаружения возможности столкновения работает путем сравнения положения углов базовой конструкции и точек соударения передвижной рабочей платформы с расчетной поверхностью самолета. В настоящем изобретении принцип обнаружения возможности столкновения работает путем расчета проникания любых точек, замеренных и принадлежащих реальной внешней поверхности/форме транспортного средства для перевозки людей, например самолета, в виртуальную трехмерную модель, представляющую передвижную рабочую платформу и включающую все физические границы, как то рабочая поверхность, поручни, крепления и другое вспомогательное оснащение, и включающую ее поддерживающую или подвешенную мачту, если такая имеется.
E) В патенте Боинга предполагается, что все дополнительные «другие объекты» должны в соответствии с планом располагаться в определенных местах, например потенциальные участки, где размещаются мусорные баки, должны быть спланированы, размечены на полу и заранее введены в блоки данных. В настоящем изобретении любой другой объект может быть дополнительно отсканирован во время сессии трехмерного сканирования и может быть автоматически добавлен в облако точек. Это означает, что новые препятствия, присутствующие в некотором месте, могут быть автоматически проинтегрированы.
F) В патент Боинга нет решения для чрезмерно выступающих частей. В настоящем изобретении, если ТСПЛ имеет чрезмерно выступающие части (например антенны и т.п.), которые требуется отсканировать с высоким разрешением, то трехмерный сканер может быть переключен на более высокое разрешение, и отдельные выступающие части могут быть дополнительно отсканированы. Результирующее облако точек будет автоматически введено в основное облако точек.
G) В патенте Боинга предотвращение столкновения осуществляется между платформами с использованием ультразвуковых сенсоров на уровне перемещения мостового крана, отслеживающих относительное расстояние между двумя соседними мостовыми кранами в широком диапазоне. В настоящем изобретении помощь в предотвращении столкновения между рабочими платформами осуществляется на постоянной основе бортовыми контроллерами путем взаимного отслеживания относительного положения и ориентации по отношению к другим соседним рабочим платформам, не только за счет верификации взаимного расстояния между мостовыми кранами, но и на основании действительных положений (координат) предполагаемых исходных точек передвижной рабочей платформы.
Сущность изобретения:
Настоящее изобретение относится к устройству для генерирования облака точек (1А), представляющего реальную внешнюю форму транспортного средства (1) для перевозки людей, расположенного в здании (4), предназначенному для определения местоположения и ориентации указанного транспортного средства (1) для перевозки людей в указанном здании (4) и предназначенному для определения относительного местоположения и ориентации по меньшей мере одной передвижной рабочей платформы (2) внутри здания (4), причем местоположение и ориентация указанного транспортного средства (1) для перевозки людей и местоположение и ориентация указанной передвижной рабочей платформы (2) определяются по отношению по меньшей мере к одной известной контрольной точке (R1) внутри указанного здания (4), при этом указанное устройство предназначено для предотвращения столкновений между передвижной рабочей платформой (2) и транспортным средством (1) для перевозки людей, причем указанное устройство содержит:
- по меньшей мере одну известную контрольную точку (R1) внутри указанного здания (4), являющуюся исходной точкой системы координат с 6 степенями свободы и служащую центральной общей контрольной точкой, и
- по меньшей мере одно трехмерное сканирующее средство (3), предназначенное для определения реальной внешней формы транспортного средства (1) для перевозки людей, и
- по меньшей мере одно стационарное вычислительное средство (6), предназначенное для генерирования облака точек (1А) из данных трехмерного сканирующего средства (3), при этом указанное облако точек (1А) представляет реальную внешнюю форму транспортного средства (1) для перевозки людей, и
- одну известную контрольную точку (R2) передвижной рабочей платформы (2), расположенную на указанной передвижной рабочей платформе (2) внутри указанного здания (4), и
- по меньшей мере одно установочное средство (8), предназначенное для установки местоположения и ориентации с учетом до 6 степеней свободы передвижной рабочей платформы (2) внутри указанного здания (4) согласно контрольной точке (R2) передвижной рабочей платформы (2) по отношению к положению контрольной точки (R1) здания, и
- трехмерное сканирующее средство (3), установочное средство (8), стационарное вычислительное средство (6) и по меньшей мере один первый процессор (21) соединены между собой через средства (30, 31, 32) связи, и
- указанный один первый процессор (21), предназначенный для предотвращения столкновений между передвижной рабочей платформой (2) внутри указанного здания (4) и транспортным средством (1) для перевозки людей путем сравнения положения отдельных точек сгенерированного облака точек (1А) с местоположением и ориентацией трехмерной модели (2А) для определения риска столкновения между передвижной рабочей платформой (2) и транспортным средством (1) для перевозки людей,
отличается тем, что указанный по меньшей мере один первый процессор (21) предназначен для генерирования трехмерной модели (2А), представляющей передвижную рабочую платформу (2), при этом указанный первый процессор (21) также предназначен для определения с учетом до 6 степеней свободы местоположения и ориентации указанной трехмерной модели (2А), представляющей указанную передвижную рабочую платформу (2).
Предпочтительно указанное трехмерное сканирующее средство (3) привязывается по меньшей мере к двум контрольным меткам (S1, S2, S3, S4, S5, S6, S7, S8, S9, S10), которые сами привязываются по меньшей мере к одной известной контрольной точке здания (R1).
Предпочтительно только одна или по меньшей мере одна передвижная рабочая платформа (2) расположена на каждой стороне продольной оси транспортного средства (1) для перевозки людей.
Предпочтительно 2, 3, 4 или 5 передвижных рабочих платформ (2) расположены на каждой стороне продольной оси транспортного средства (1) для перевозки людей.
Предпочтительно передвижная рабочая платформа (2) представляет собой либо подвешенную под крышей здания рабочую платформу, либо закрепленную на основании рабочую платформу, либо колесную рабочую платформу, либо комбинацию подвешенной под крышей здания рабочей платформы, и закрепленной на основании рабочей платформы, и колесной рабочей платформы.
Предпочтительно передвижная рабочая платформа (2) управляется автоматически или вручную.
Предпочтительно по меньшей мере одна передвижная рабочая платформа (2) несет одно или несколько печатающих устройств, или камер, или роботов, или устройств для обработки поверхности, или людей, или комбинацию печатающего устройства, и камеры, и робота, и устройства для обработки поверхности, и людей.
Предпочтительно транспортное средство (1) для перевозки людей может быть самолетом, вертолетом, ракетой, космическим челноком, пусковым устройством космических летательных аппаратов, поездом, автомобилем или автобусом, или кораблем, или частью любого из ранее упомянутых транспортных средств (1) для перевозки людей.
Предпочтительно устройство содержит калиброванные контрольные метки (S1, S2, S3, S4, S5, S6, S7, S8, S9, S10), которые расположены на неподвижных элементах здания (4) во время генерирования облака точек (1А).
Предпочтительно во время генерирования облака точек (1А) трехмерное сканирующее средство (3) может перемещаться с помощью указанной передвижной рабочей платформы (2) или оставаться неподвижным.
Предпочтительно средства связи базируются на инфраструктуре ЛВС, основанной на локальной сети Ethernet (30), или беспроводной локальной сети (31, 32).
Предпочтительно стационарное вычислительное средство (6) содержит по меньшей мере один главный сервер (10), и по меньшей мере один второй процессор (20) для обработки трехмерных данных, получаемых от трехмерного сканирующего средства (3), и по меньшей мере один первый процессор (21) для управления предотвращением столкновений, и по меньшей мере один настольный графический пользовательский интерфейс (11), и инфраструктуру локальной сети Ethernet (30, 31, 32), соединяющую все компоненты вместе.
Настоящее изобретение относится к использованию устройства для предотвращения столкновений между указанной по меньшей мере одной передвижной рабочей платформой (2) и указанного транспортного средства (1) для перевозки людей.
Предпочтительно бортовой первый процессор (21) передвижной рабочей платформы (2) сравнивает местоположение отдельных точек сгенерированного облака точек (1А) с местоположением и ориентацией трехмерной модели (2А), так что в случае обнаружения риска столкновения передвижной рабочей платформы (2) и транспортного средства (1) для перевозки людей реализуется заданная кривая замедления вплоть до полной остановки с обязательным соблюдением заданного минимального расстояния до физического контакта между любой частью транспортного средства (1) для перевозки людей и передвижной рабочей платформой (2).
Предпочтительно минимальное расстояние между передвижной рабочей платформой (2) и транспортным средством (1) для перевозки людей составляет от 100 до 200 мм, предпочтительно 150 мм.
Предпочтительно устройство предназначено для динамического планирования маршрута (ДПМ) по меньшей мере одной передвижной рабочей платформы (2), чтобы частично или полностью автоматизировать управляемые вручную перемещения указанной передвижной рабочей платформы (2) к транспортному средству (1) для перевозки людей и вдоль него в соответствии с запрограммированными траекториями.
Настоящее изобретение относится также к способу генерирования облака точек (1А), представляющего реальную внешнюю форму транспортного средства (1) для перевозки людей, расположенного в здании (4), и для определения местоположения и ориентации указанного транспортного средства (1) для перевозки людей в указанном здании, а также для определения относительного местоположения и ориентации по меньшей мере одной передвижной рабочей платформы (2) с учетом до 6 степеней свободы, причем, как определено в п. 1, указанный способ предназначен для предотвращения столкновений между передвижной рабочей платформой (2) и транспортным средством (1) для перевозки людей, и содержит этапы:
A) определение контрольной точки (R1) указанного известного здания (4), являющейся исходной точкой системы координат с 6 степенями свободы и служащей центральной общей контрольной точкой, и
B) определение реальной внешней формы указанного транспортного средства (1) для перевозки людей с помощью по меньшей мере одного трехмерного сканирующего средства (3), и
C) генерирование облака точек (1А), представляющего реальную внешнюю форму транспортного средства (1) для перевозки людей, с помощью по меньшей мере одного стационарного вычислительного средства (6), и
D) определение известной контрольной точки (R2) передвижной рабочей платформы (2), расположенной на указанной передвижной рабочей платформе (2), и
E) установка местоположения и ориентации передвижной рабочей платформы (2) с учетом до 6 степеней свободы в соответствии с положением контрольной точки (R2) по отношению к контрольной точке (R1) с помощью по меньшей мере одного установочного средства (8), и
F) генерирование трехмерной модели (2А), представляющей передвижную рабочую платформу (2), с помощью по меньшей мере одного первого процессора (21), и
G) определение с учетом до 6 степеней свободы местоположения и ориентации указанной трехмерной модели (2А), представляющей указанную передвижную рабочую платформу (2), с помощью первого процессора (21), и
H) осуществление связи между трехмерным сканирующим средством (3), установочным средством (8), стационарным вычислительным средством (6) и первым процессором (21) с помощью средств связи, и
I) сравнивание местоположений отдельных точек сгенерированного облака точек (1А) с местоположением и ориентацией трехмерной модели (2А) для определения риска столкновения между передвижной рабочей платформой (2) и транспортным средством (1) для перевозки людей.
Предпочтительно способ имеет дополнительный этап J) соблюдение заданной кривой замедления вплоть до полной остановки с обязательным соблюдением заданного минимального расстояния до физического контакта между любой частью транспортного средства (1) для перевозки людей и передвижной рабочей платформой (2) с помощью первого процессора (21).
Предпочтительно этапы В) и С) указанного способа занимают от 60 до 80 минут.
Предпочтительно этапы В), и С), и I) указанного способа имеют разрешающую способность облака точек (1А) транспортного средства (1) для перевозки людей, составляющую от 10 мм до 50 мм.
Описание фигур:
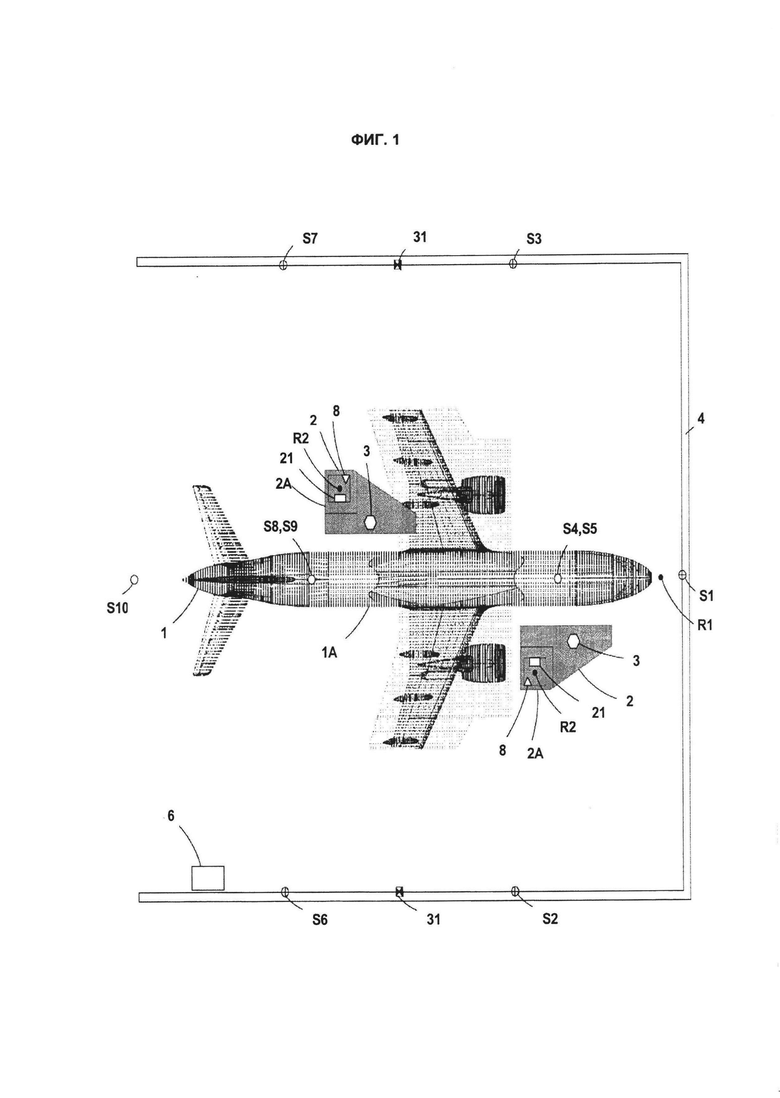
Фиг. 1 показывает вид сверху облака точек (1А), представляющего транспортное средство (1) для перевозки людей в здании (4), и одну передвижную рабочую платформу (ПРП) (2) на каждой продольной стороне транспортного средства (1) для перевозки людей (ТСПЛ), например самолета, а также все средства, существенные для реализации настоящего изобретения. Передвижная рабочая платформа (2) перемещается вдоль ТСПЛ (1) без контакта с ТСПЛ (1).
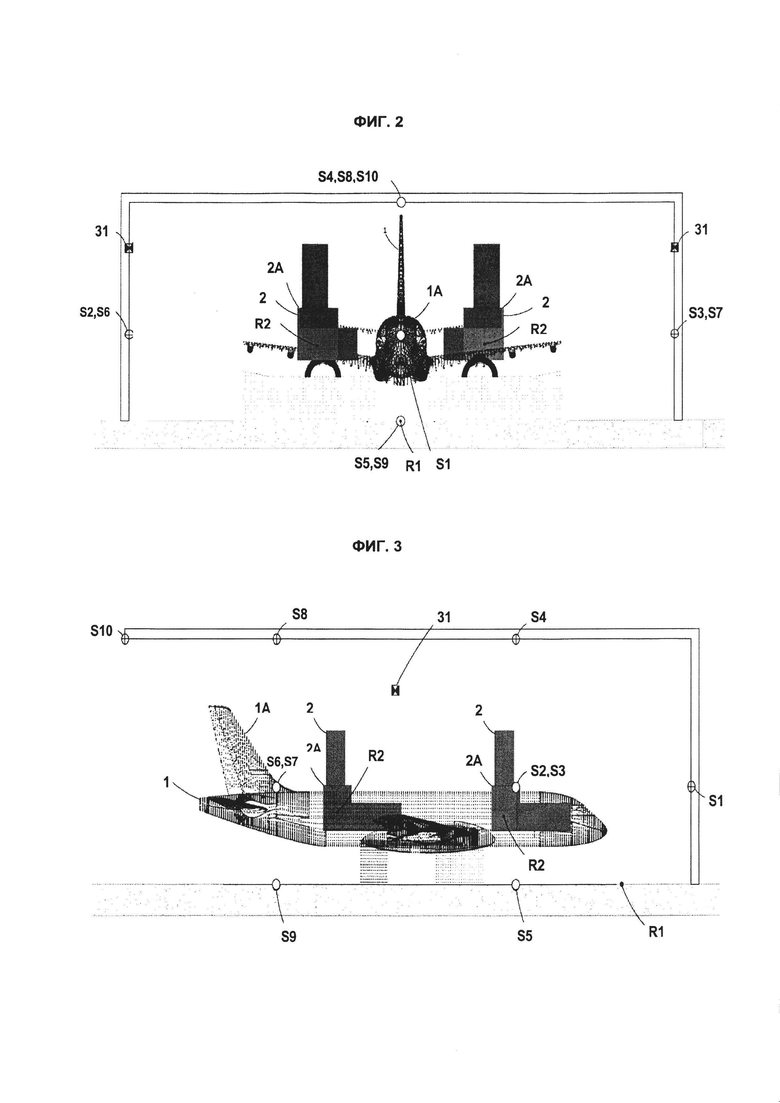
Фиг. 2 показывает вид спереди облака точек (1А), представляющего ТСПЛ (1), например самолет, в здании (4), контрольную точку (R1), две рабочие платформы (2) на каждой продольной стороне ТСПЛ в различных положениях и контрольные метки (S1, S2, S3, S4, S5, S6, S7, S8, S9, S10).
Фиг. 3 показывает вид сбоку облака точек (1А), представляющего ТСПЛ (1), например самолет, в здании (4), контрольную точку (R1), две рабочие платформы (2) в различных местоположениях и контрольные метки (S1, S2, S3, S4, S5, S6, S7, S8, S9, S10).
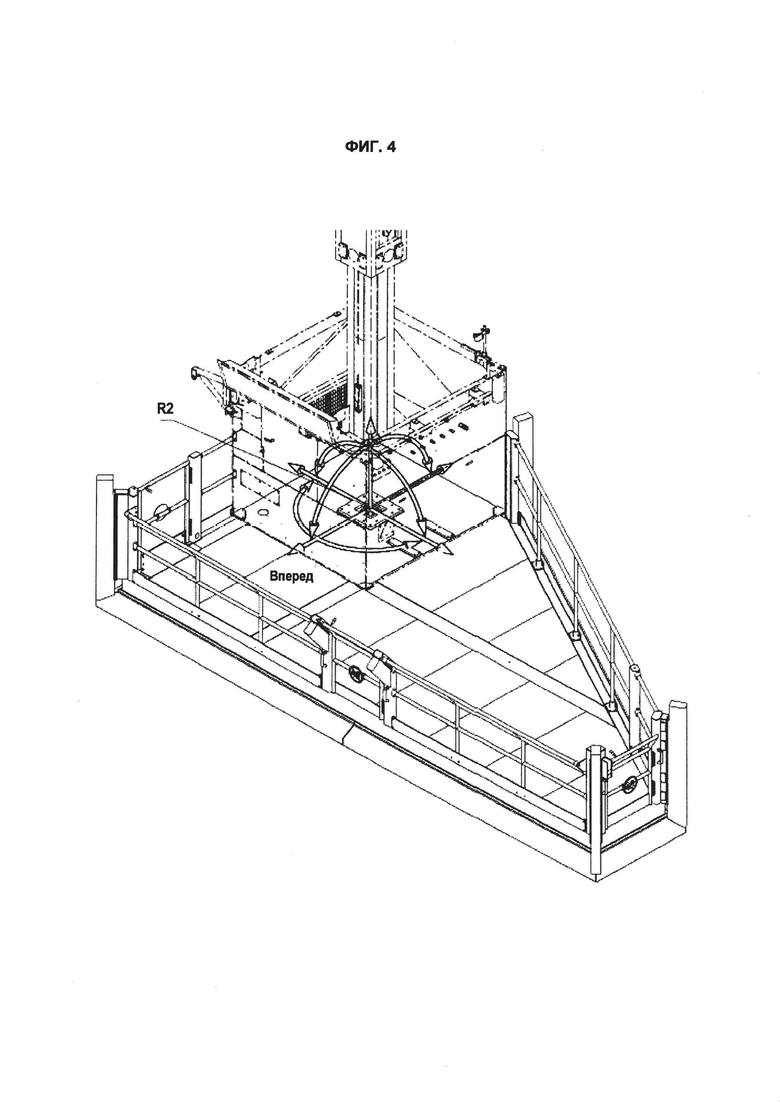
Фиг. 4 показывает положение контрольной точки (R2) на пересечении пола передвижной рабочей платформы и вертикальной оси вертикальной телескопической руки, а также показывает степени свободы (6 степеней свободы) системы на подвешенной под крышей передвижной рабочей платформе (2).
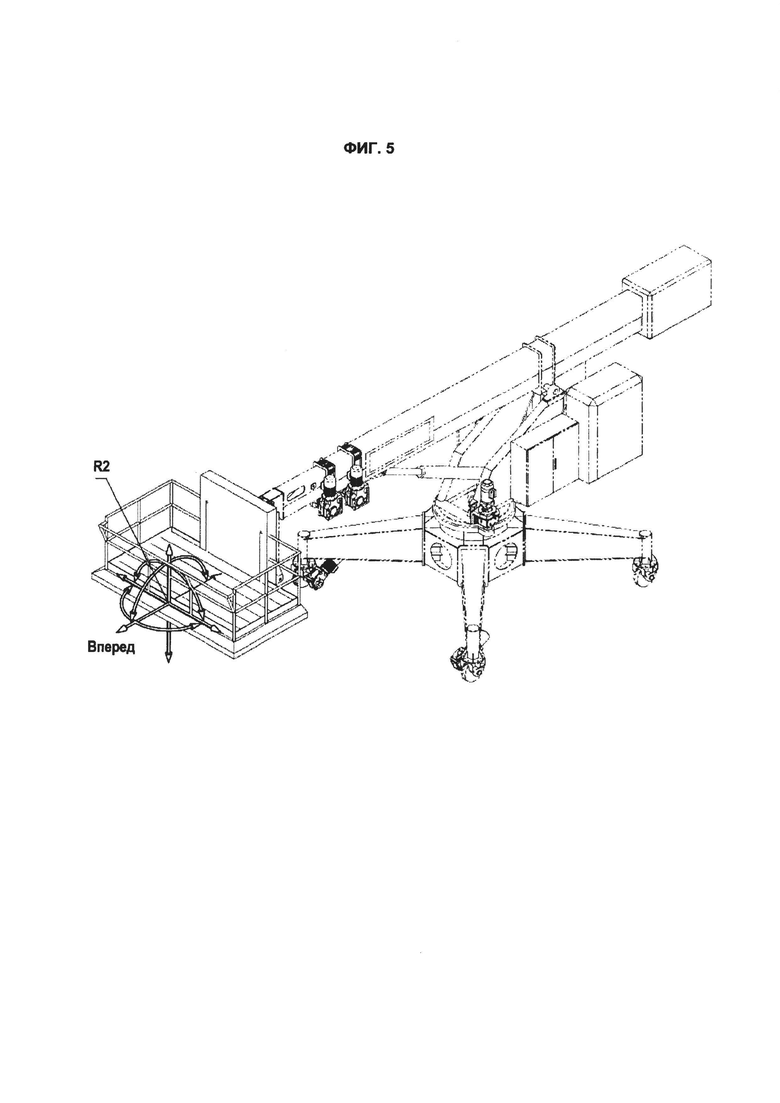
Фиг. 5 показывает положение контрольной точки (R2) на закрепленной на основании передвижной рабочей платформе (2) и степени свободы (6 степеней свободы) системы.
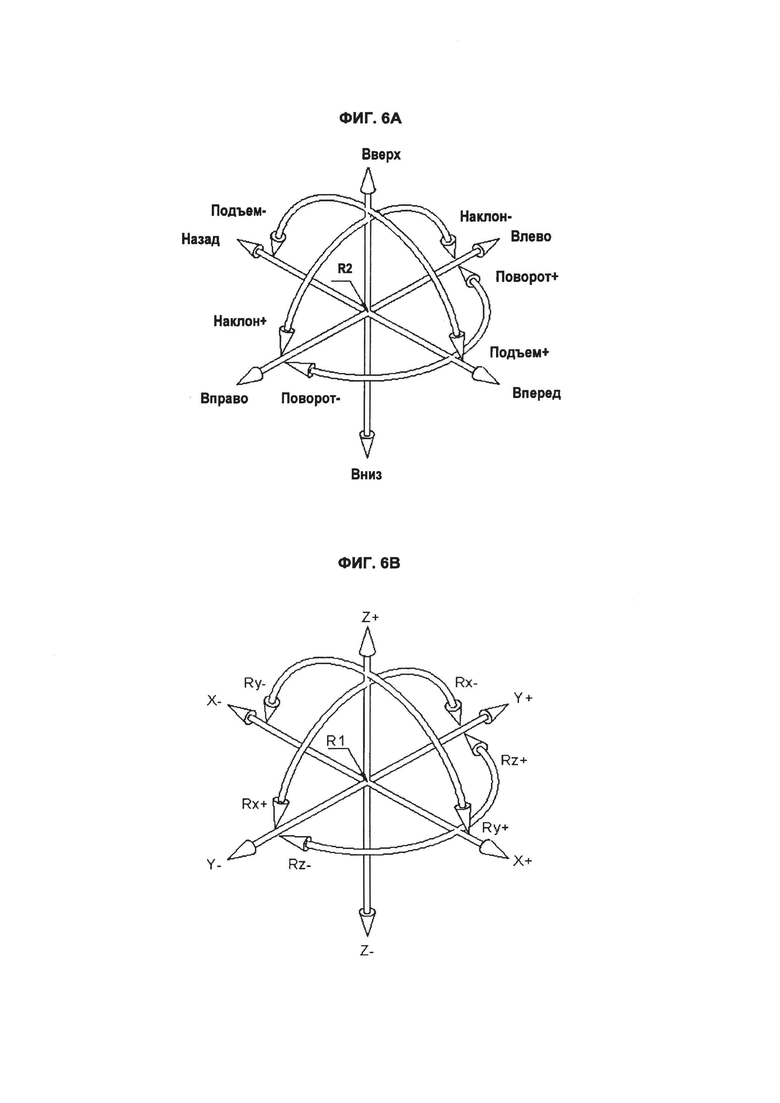
Фиг. 6А представляет собой схематическое изображение системы координат с шестью степенями свободы относительно R2.
Фиг. 6В представляет собой схематическое изображение системы координат с шестью степенями свободы относительно R1.
Фиг. 7 представляет собой фотографию ТСПЛ, например самолета, в здании и по одной передвижной рабочей платформе на различных высотах на каждой продольной стороне ТСПЛ.
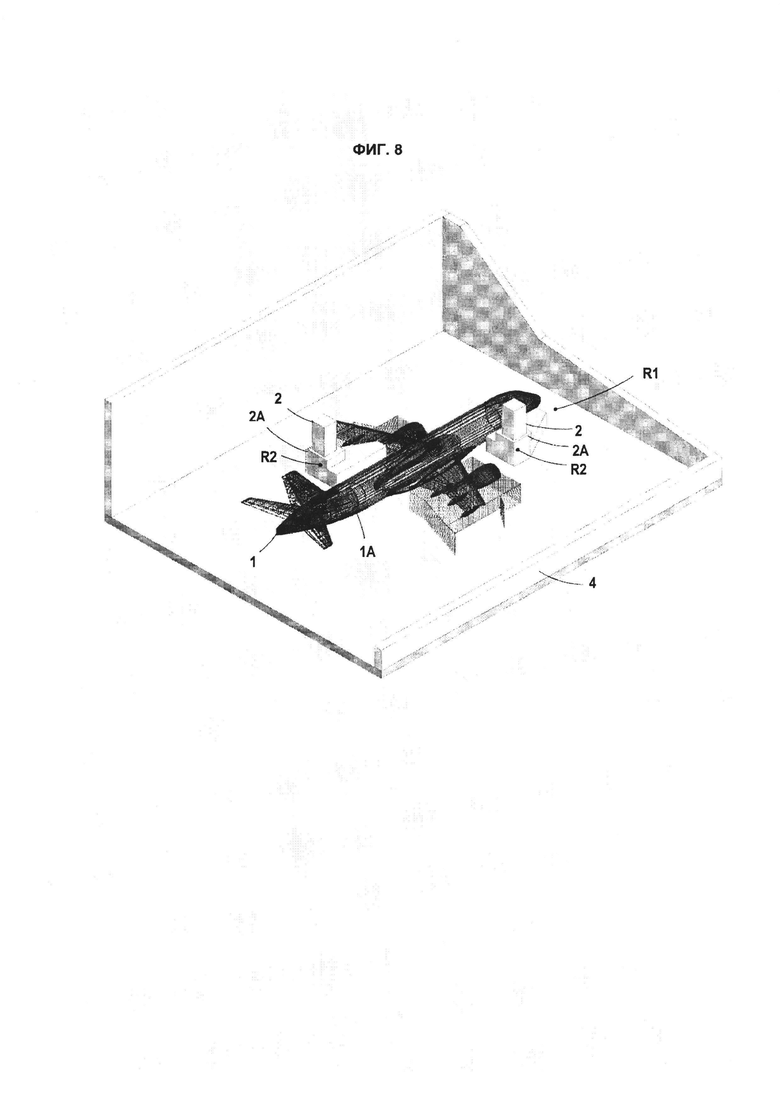
Фиг. 8 показывает сгенерированное облако точек (1А) ТСПЛ (1), например самолета, в здании (4), а также сгенерированную трехмерную модель (2А) двух передвижных рабочих платформ (2).
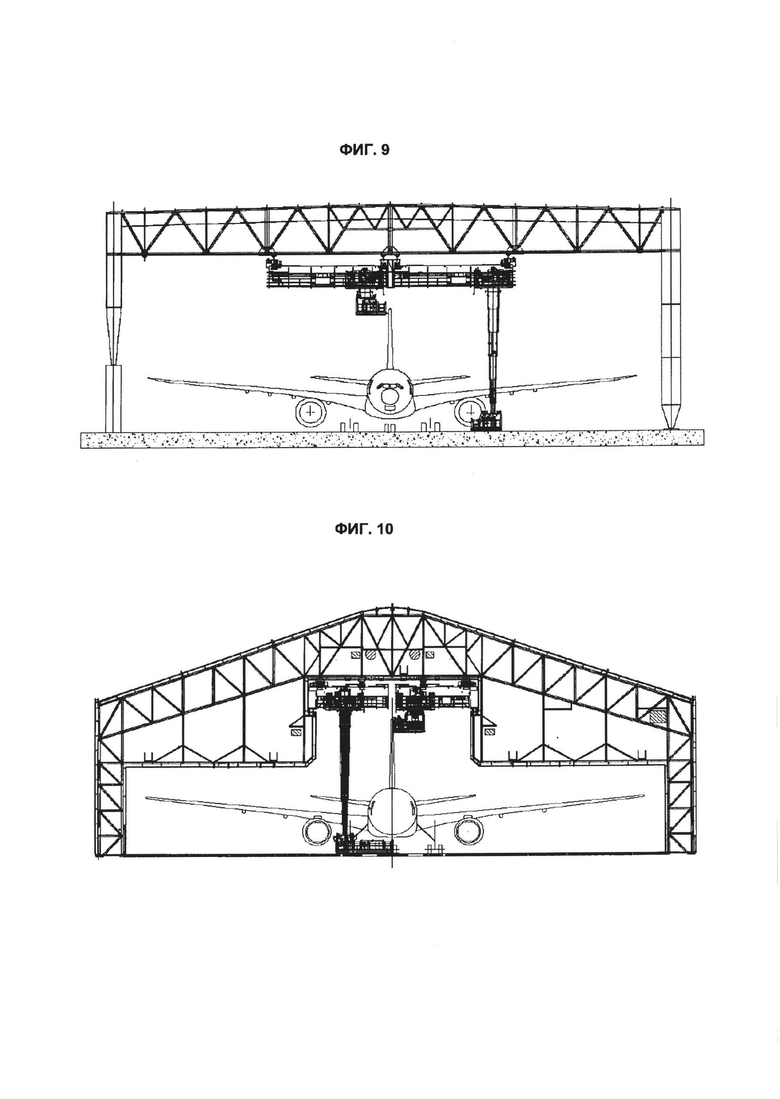
Фиг. 9 показывает классическую форму конструкции здания (4).
Фиг. 10 показывает оптимизированную под самолет форму конструкции здания (4).
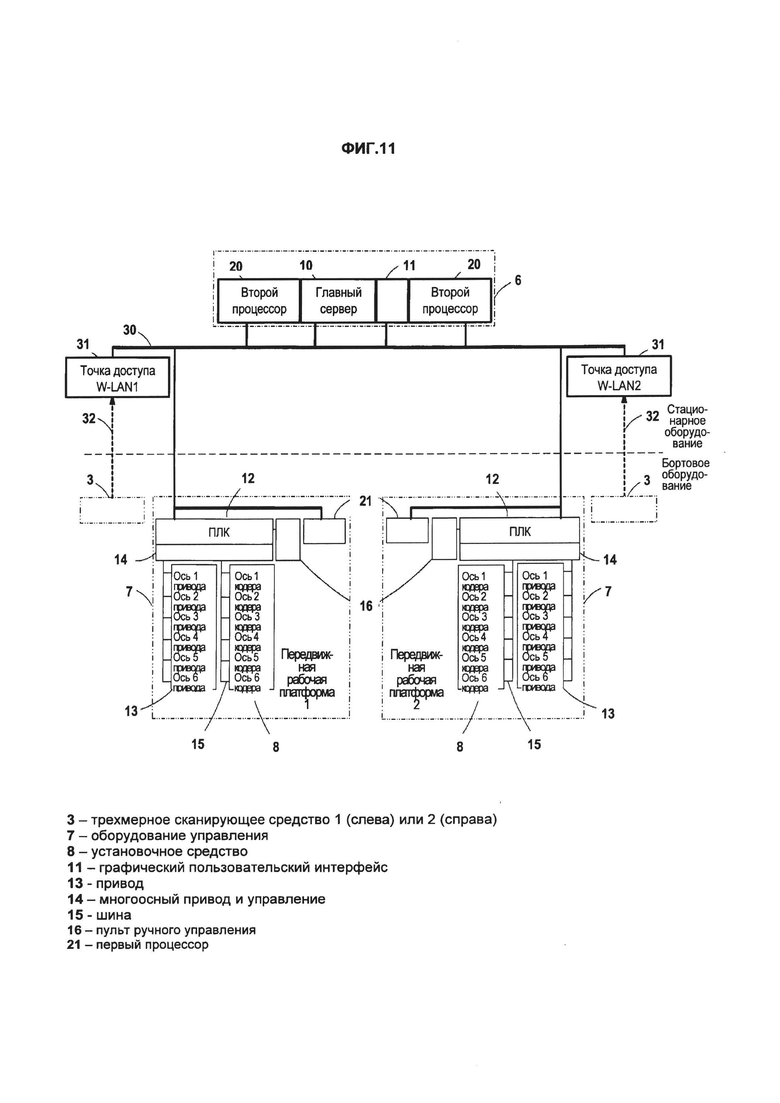
Фиг. 11 показывает аппаратную конфигурацию, сеть и схему соединений между оборудованием, составляющим систему предотвращения столкновений в соответствии с настоящим изобретением.
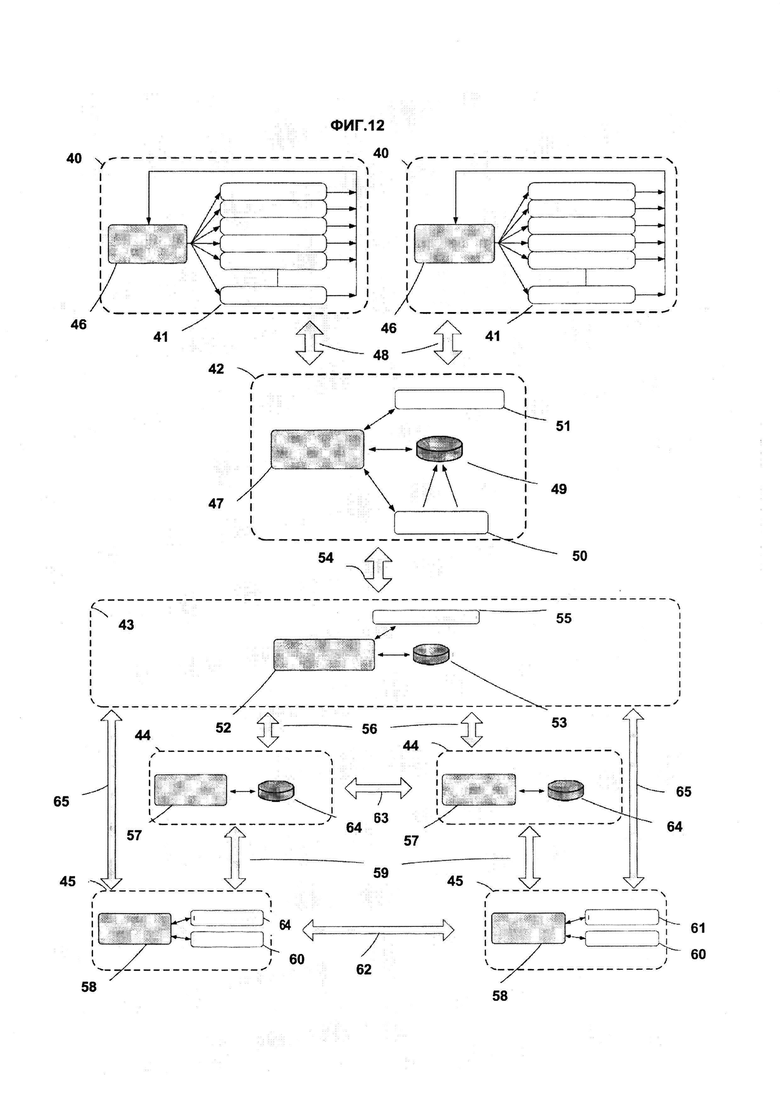
Фиг. 12 показывает блок-схему потоков данных между оборудованием, составляющим систему предотвращения столкновений в соответствии с настоящим изобретением.
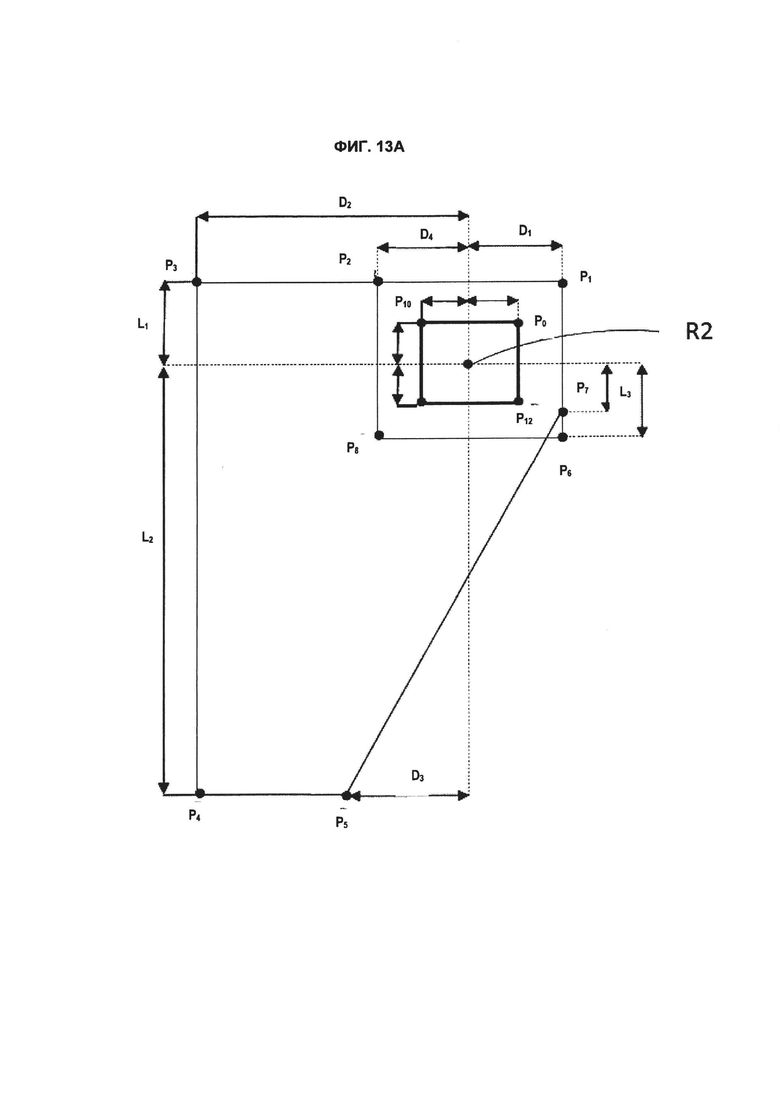
Фиг. 13А показывает вид сверху основных параметров для определения упрощенной виртуальной трехмерной модели (2А) для подвешенной под крышей здания рабочей платформы.
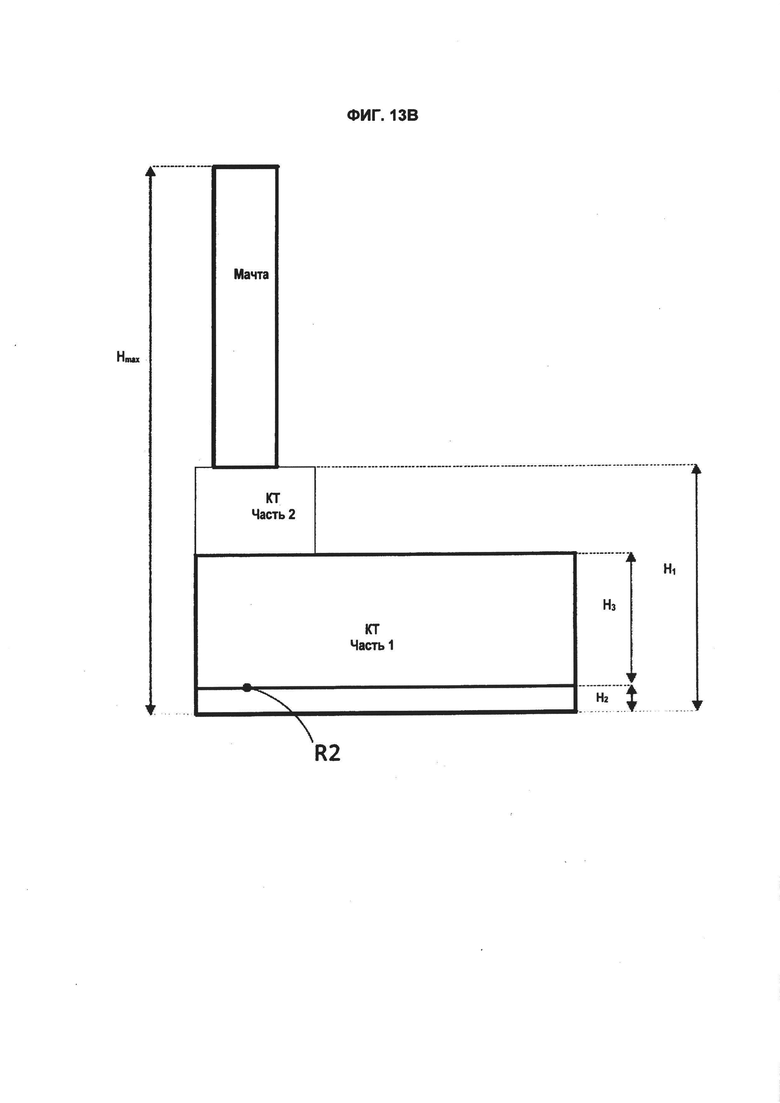
Фиг. 13В показывает вид сбоку основных параметров для определения упрощенной виртуальной трехмерной модели (2А) для подвешенной под крышей здания рабочей платформы.
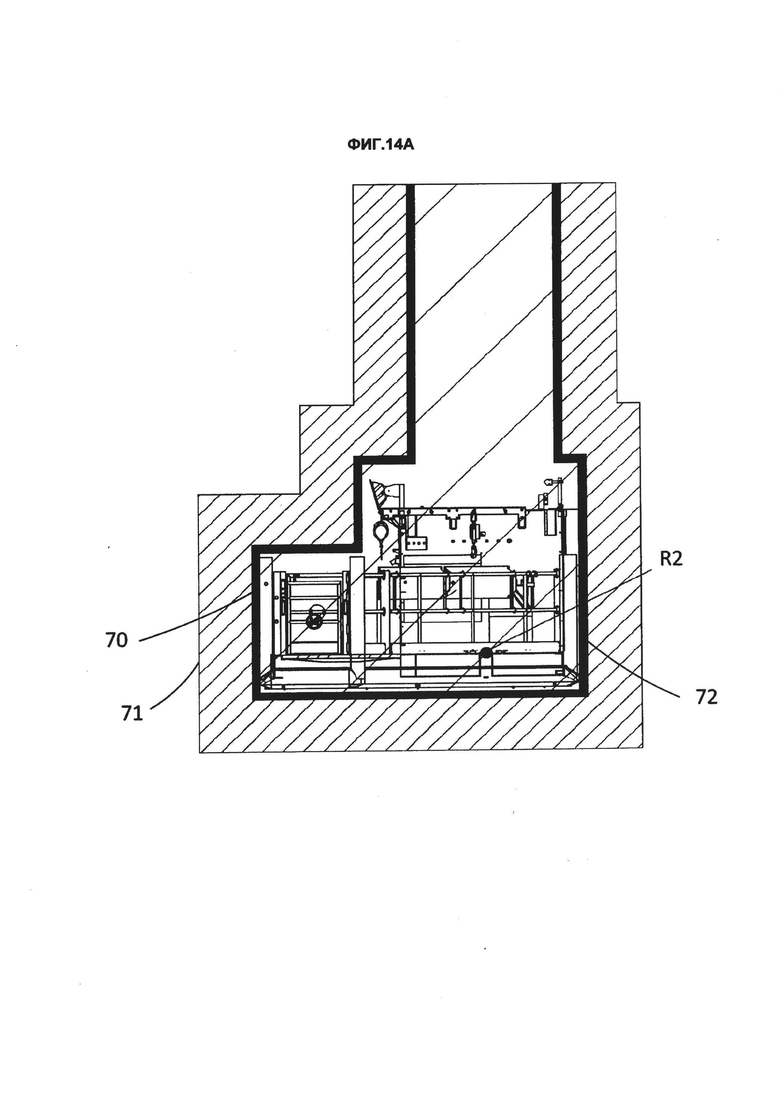
Фиг. 14А показывает вид сбоку виртуальной центральной части (70), защитных оболочек (71, 72) и (R2), представляющих ПРП (2).
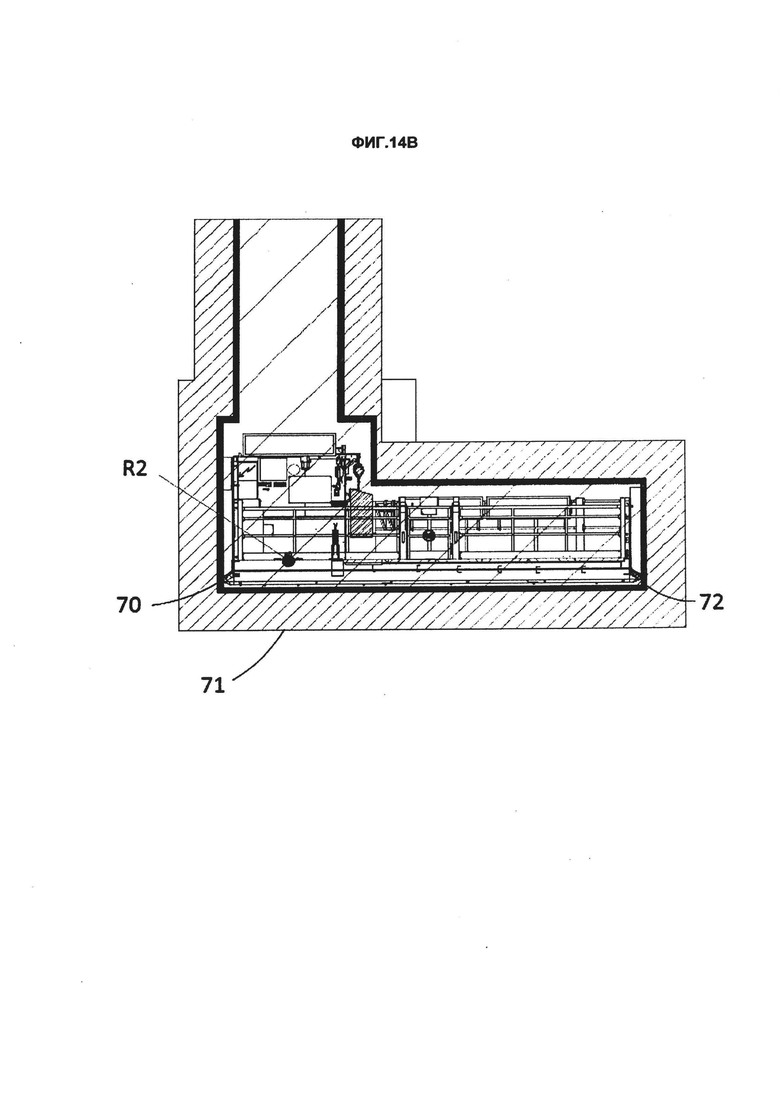
Фиг. 14В показывает вид спереди виртуальной центральной части (70) и защитных оболочек (71, 72), представляющих подвешенную под крышей здания передвижную рабочую платформу (2), и (R2).
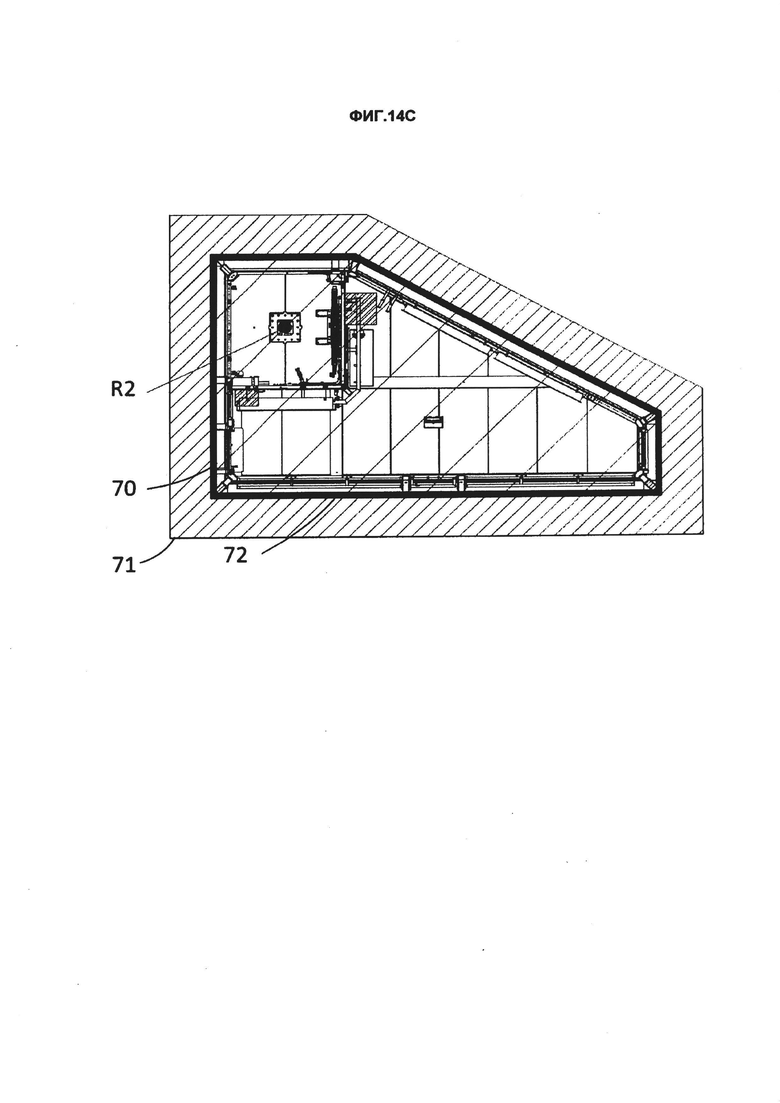
Фиг. 14С показывает вид сверху виртуальной центральной части (70) и защитных оболочек (71, 72), представляющих подвешенную под крышей здания передвижную рабочую платформу (2), и (R2).
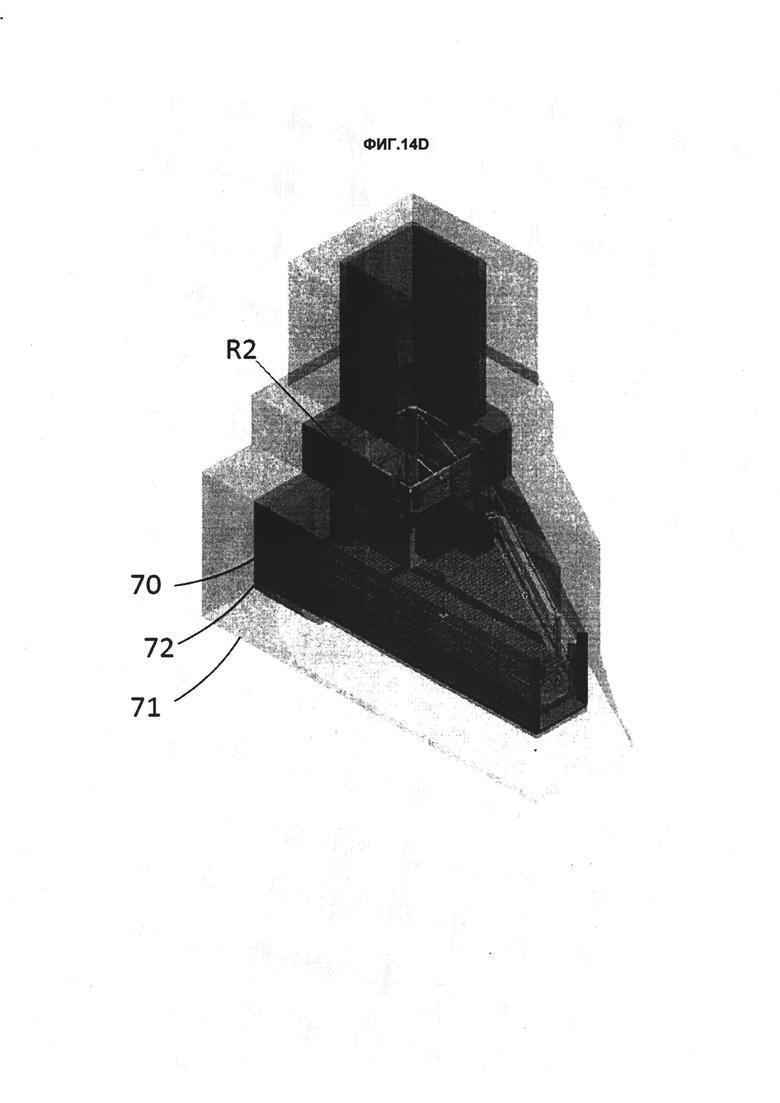
Фиг. 14D показывает общий вид виртуальной центральной части (70) и защитных оболочек (71, 72), представляющих подвешенную под крышей здания передвижную рабочую платформу (2), и (R2).
Подробное техническое описание:
Согласно Фиг. 1, Фиг. 2 и Фиг. 3 система позиционирования и предотвращения столкновений по настоящему изобретению обычно используется при определении внешней поверхности/формы и местоположения препятствий, например транспортного средства (1) для перевозки людей (ТСПЛ), в частности самолета, в пределах специализированной зоны здания (4), такого как ангар для покраски и технического обслуживания, для определения и установления запрограммированных ограничений перемещения по меньшей мере одной передвижной рабочей платформы (ПРП) (2) и для управления передвижными рабочими платформами (ПРП) (2) для предотвращения столкновения.
Согласно Фиг. 7, Фиг. 9 и Фиг. 10 система будет обычно работать в здании (4), таком как ангар для покраски и технического обслуживания самолетов, когда типичный общий размер здания (4) для парковки одного конкретного самолета составляет около 80-90 м в длину, 70-80 м в ширину и 30-35 м в высоту. Форма здания (4) может быть классической (см. Фиг. 9) или оптимизированной для покраски самолета (см. Фиг. 10).
Фиг. 7 показывает самолет (1) в здании и по одной передвижной рабочей платформе (2) с каждой стороны самолета (1).
Здание (4) оборудовано ПРП (2), причем передвижные рабочие платформы (2) представляют собой либо подвешенные под крышей здания передвижные рабочие платформы, либо закрепленные на основании рабочие платформы, либо размещенные на полу передвижные рабочие платформы, либо комбинацию подвешенных под крышей здания рабочих платформ, закрепленных на основании рабочих платформ и размещенных на полу передвижных рабочих платформ.
Фиг. 4 и Фиг. 5 показывают типичные передвижные рабочие платформы (ПРП) - либо подвешенные под крышей здания (Фиг. 4), либо закрепленные на основании (Фиг. 5).
ПРП (2) обычно переносит операторов для близкого доступа к различным точкам вокруг ТСПЛ (1) - для инспекции или других рабочих целей. Она может также быть оборудована, вместо переноса операторов или для переноса совместно с операторами, специализированными устройствами, содержащими печатное устройство, или камеру, или робот, или устройство для обработки поверхности.
ПРП (2) обычно управляется операторами вручную, но может также быть полностью или частично автоматизирована.
ПРП (2) может передвигаться, имея до 6 степеней свободы.
Предпочтительно здание (4) оборудуется двумя, четырьмя или шестью передвижными рабочими платформами (ПРП) (2), причем половина их предпочтительно перемещается вдоль левой стороны ТСПЛ (1), а другая половина - по другой стороне ТСПЛ (1).
По меньшей мере, одно ТСПЛ (1) паркуется в здании, причем ТСПЛ (1) может представлять собой самолет, ракету, космический челнок, пусковое устройство космических летательных аппаратов, поезд, автомобиль, автобус, или корабль, или другое, или часть любого из ранее указанных транспортных средств для перевозки людей (ТСПЛ) (1).
Внутри здания (4) может быть установлено другое оборудование для специализированного применения, стационарное или передвижное, относящееся к зданию (4) или к процессу - обычно трапы, или лестницы, или леса, или доки, или другие рабочие платформы, а также элементы конструкции здания как, например, стены или колонны.
Значение внешней поверхности/формы: поскольку для ТСПЛ (1) практика парковки каждый раз точно в одном и том же месте внутри здания (4) не является обычной и поскольку различные транспортные средства для перевозки людей (ТСПЛ) (1) будут иметь различное пространственное положение/ориентацию и будут подвергаться изменениям внешней формы - в сравнении с теоретической моделью САПР, вследствие меняющихся нагрузок на борту ТСПЛ (1), меняющихся амортизирующих элементов и меняющегося давления в шинах, а также меняющегося основного и вспомогательного оборудования, необходимо определить реальную внешнюю поверхность/форму указанного ТСПЛ (1) как облако точек (1А) относительно по меньшей мере одной известной контрольной точки (R1) здания, служащей центральной контрольной точкой по отношению к абсолютному началу координат системы с шестью степенями свободы внутри здания (4), относительно которой перемещаются передвижные рабочие платформы (ПРП) (2). В контексте той же ситуации определяется местоположение и ориентация ТСПЛ (1) с учетом до шести степеней свободы.
Предпочтительно указанный способ имеет разрешение облака точек (1А) ТСПЛ (1) в диапазоне от 10 мм до 50 мм, тогда как разрешение для простых форм (фюзеляж самолета) может быть ниже, а для более сложных форм (маленькие антенны) может быть выше. Предпочтительно указанный способ требует для сбора и обработки данных полного облака точек от 60 до 80 минут.
Установочное средство (8) обычно представляет собой комбинацию нескольких устройств, таких как по меньшей мере один кодер и по меньшей мере один программируемый логический контроллер (12), см. Фиг. 11.
Положение ПРП (2) определяется с помощью установочного средства (8), чтобы определить известную контрольную точку (R2) ПРП (2) по отношению к (R1).
В случае типичного применения при предотвращении столкновений на основании установочного устройства (8) генерируется трехмерная модель (2А), представляющая ПРП (2), ее положение и ориентация с учетом до 6 степеней свободы по отношению к указанной контрольной точке (R2).
Трехмерная модель (2А) представляет собой комбинацию упрощенных форм, включающую не только рабочую поверхность передвижной рабочей платформы, но также перила, крепления, направляющие мачты и другие вспомогательные элементы, причем она оптимизируется как можно ближе к реальности.
Результирующая оболочка трехмерной модели (2А), представляющая ПРП (2), расширяется пропорционально до достижения желаемых значений коэффициентов безопасности, чтобы сформировать виртуальные защитные оболочки вокруг рабочей платформы. Положения отдельных точек сгенерированного облака точек (1А), представляющего ТСПЛ (1), сравниваются с положением трехмерной модели (2А). Таким образом, когда обнаруживается потенциальный риск столкновения между ПРП (2) и ТСПЛ (1), реализуется заданная кривая замедления вплоть до полной остановки ПРП (2) с обязательным соблюдением заданного минимального расстояния, чтобы избежать физический контакт между любой частью ТСПЛ (1) и ПРП (2).
Обычные установки выполняются для обеспечения снижения скорости при расстоянии между ПРП (2) и ТСПЛ (1) около 800-1000 мм и обеспечения полной остановки при минимальном расстоянии между ПРП (2) и ТСПЛ (1) около 100-200 мм.
Определяется направление потенциального риска, так что ограничиваются только перемещения ПРП (2) в сторону ТСПЛ (1).
Фиг. 8 показывает сгенерированное облако точек (1А) самолета (1) в здании, а также сгенерированную трехмерную модель (2А) передвижной рабочей платформы (2).
Поскольку облако точек (1А) может включать в себя другие точки, не принадлежащие ТСПЛ (1), относящиеся к другим элементам, расположенным внутри здания (4), и находящиеся в пределах рабочего диапазона передвижной рабочей платформы, применение способа предотвращения столкновений может быть расширено и использовано также к другим элементам с тем же эффектом.
Поскольку различные ПРП (2) могут делить ту же самую рабочую зону, применение способа предотвращения столкновений может быть расширено на предотвращение столкновений между передвижными рабочими платформами (ПРП) (2).
Настоящее изобретение относится также к применению устройства для автоматизации сейчас вручную управляемых перемещений указанных ПРП (2) вдоль ТСПЛ (1) на основе запрограммированных траекторий.
Ниже изложена терминология, используемая для описания системы координат, в соответствии с которой определяются реальная внешняя поверхность/форма и местоположение/ориентация ТСПЛ (1), относительно которого перемещается ПРП (2).
Согласно Фиг. 1, Фиг. 2, Фиг. 3 и Фиг. 6А одна известная абсолютная контрольная точка (R1) здания представляет собой заданную точку, расположенную внутри здания (4), и является исходной точкой системы координат с шестью степенями свободы. Точное местоположение устанавливается один раз, во время ввода в эксплуатацию, с использованием специального стендового измерительного средства, например лазерного трекера, и может слегка различаться от здания к зданию. Эта точка определяется как общая контрольная точка для всех систем. Для определения ориентации осей X, Y и Z принимается следующее условие: ориентация въезда ТСПЛ (1) внутрь здания (4) задает направление оси X. Правило правой руки декартовой системы координат используется для определения другой оси и вращений, где ось X - главное горизонтальное направление, ось Y - перпендикулярна оси X, а ось Z - перпендикулярна плоскости XY.
Согласно Фиг. 4, Фиг. 5 и Фиг. 6Б контрольная точка (R2) ПРП (2) представляет собой заданную точку, принадлежащую ПРП (2) и идентичную для каждого типа ПРП (2). R2 может быть центром масс или другой произвольной точкой и определяется один раз с использованием САПР. R2 является началом системы координат с шестью степенями свободы в отношении свободы перемещения ПРП (2) в трехмерном пространстве. ПРП (2) имеет свободу изменения положения в переводе на три перпендикулярные оси в виде движения вперед/назад, вверх/вниз, вправо/влево, и изменения ориентации за счет положительного или отрицательного поворота вокруг трех перпендикулярных осей, названными наклон, подъем и поворот. Предпочтительно оператор управляет ПРП (2) относительно R2.
Для определения внешней поверхности ТСПЛ (1) используется по меньшей мере одно трехмерное сканирующее средство (3). Трехмерное сканирующее средство (3) обычно представляет собой лидар, основанный на технологии, использующей круговые импульсы лазерного излучения для измерения расстояний до цели путем освещения такой цели и измерения отраженных импульсов с помощью сенсора, так что разница во временах прихода отраженных импульсов лазера и в длинах волн может быть использована для создания цифровых трехмерных представлений цели в виде облака точек. Этот высокопроизводительный лазерный сканер предпочтительно является транспортируемым, имеет встроенный калиброванный инклинометр и предпочтительно имеет аппаратуру беспроводной ЛВС, автономную систему аккумулятора и использует технику регистрации данных в реальном режиме времени как, например, имеющийся на рынке сканер Faro Focus S70.
Трехмерное сканирующее средство (3) привязывается по меньшей мере к двум контрольным меткам (S1, S2) здания, которые сами привязываются по меньшей мере к одной известной контрольной точке (R1) здания. Предпочтительно эти специальные контрольные метки (S1, S2 и т.д.) здания калибруются и размещаются один раз при первом вводе в эксплуатацию на неподвижной части конструкции или на полу с использованием специального метрологического устройства как, например, лазерный трекер.
Трехмерное сканирующее средство (3) будет запрограммировано на фиксацию, в первую очередь, этих контрольный меток (S1, S2, S3 и т.д.) здания перед началом каждого процесса сканирования и генерирования облака точек (1А).
Система определения местоположения и предотвращения столкновений в соответствии с настоящим изобретением может объединять множество передвижных рабочих платформ ПРП (2) и сканирующих средств (3). Количество и типы передвижных рабочих платформ ПРП (2) зависят от конфигурации здания (4). Количество сканирующих средств (3) определяется максимальной допустимой длительностью операций сканирования. Процесс сканирования может осуществляться параллельно при использовании нескольких сканирующих средств (3). Обычно использование двух сканирующих средств сокращает время операции сканирования в два раза.
Конфигурация аппаратных средств:
Согласно Фиг. 11, которая иллюстрирует конфигурацию аппаратных средств, сеть и схему соединений между различными компонентами оборудования, составляющими систему определения местоположения и предотвращения столкновений, при этом система базируется на двух передвижных рабочих платформах ПРП (2) и двух сканирующих средствах (3). Для большего удобства ПРП 1 (2) связана с трехмерным сканирующим средством 1 (3) и будет работать на левой стороне от центральной линии здания (4), а ПРП 2 (2) связана с трехмерным сканирующим средством 2 (3) и будет работать на правой стороне от центральной линии здания (4).
Система образована из трех основных подсистем: трехмерные сканирующие средства (3), стационарное вычислительное средство (б) и оборудование управления (7) передвижной рабочей платформой.
Термин «средства связи» соответствует оборудованию, которое поддерживает связь и обменивается данными через интерфейсы ЛВС (LAN), основанной на локальной сети Ethernet (30), или беспроводной локальной сети (WLAN) (31, 32).
LAN/WLAN (30, 31, 32):
Чтобы обеспечить работу беспроводной локальной сети LAN, основанной на сети Ethernet (32), между трехмерным сканирующим средством (3) и другим оборудованием здание (4) оборудовано точками доступа (31) к беспроводной локальной сети Ethernet, зафиксированными на конструкции здания (4), предпочтительно на каждой стороне здания (4), если смотреть от центральной линии здания (4), для оптимизации работ. В зависимости от конфигурации здания (4) количество и местоположение точек доступа (31) может изменяться. Все точки доступа к беспроводной локальной сети Ethernet подсоединены к ЛВС (LAN), основанной на локальной сети Ethernet (30). Все оборудование, связанное с системой определения местоположения и предотвращения столкновений и подключенное к ЛВС (LAN), основанной на локальной сети Ethernet, имеет один и тот же IP-диапазон и подсеть и предпочтительно должно быть отделено от зарубежных сетей или IP-партнеров для предотвращения помех.
Трехмерные сканирующие средства (3):
Трехмерные сканирующие средства (3) предпочтительно имеют средства связи беспроводной ЛВС (LAN) и сконфигурированы в домене LAN для автоматического повторного соединения с беспроводной локальной сетью LAN.
Стационарное вычислительное средство (6):
Стационарное вычислительное средство (6) содержит один первый выделенный процессор (21) для обработки трехмерных данных (20) от трехмерного сканирующего средства (3). Стационарное вычислительное средство (6) содержит также один главный сервер (10), который служит основной базой данных для облака точек и также действует как интерфейсный преобразователь для оборудования управления (7) передвижной рабочей платформой. Графический пользовательский настольный интерфейс (11) обычно представляет собой интерактивный экран, специально разработанный для того, чтобы служить в качестве интерфейса «машина-человек».
Оборудование управления передвижной рабочей платформой (2):
Каждая передвижная рабочая платформа ПРП (2) содержит бортовое оборудование управления, включающее программируемый логический контроллер (ПЛК) (12), предпочтительно безотказного типа как, например, Siemens Simatic S7-3xx-F. Каждая ось привода (13) ПРП (2) управляется независимо с помощью многоосевого привода на основе ПЛК, и блока управления (14). Для оси привода (13) подходят все типы приводов, причем для более плавного регулирования предпочтительны инверторные приводы или регулируемые пропорциональные клапаны, однако система будет также работать, если привод осей осуществляется напрямую от пускателей электродвигателей. Текущее положение каждой оси ПРП (2) определяется с использованием набора абсолютных установочных средств (8), связанных напрямую с блоком ПЛК (12) через промышленно выпускаемую шину, например, Profibus или Profinet, (15) и привязывается в соответствии с описанным ниже способом. Бортовой блок ПЛК (12) связан с бортовым пультом (16) ручного управления, на котором оператор задает точки серии перемещений обычно с помощью ручек управления или кнопок, в то время как ПРП (2) управляется вручную. Ориентация пульта (16) ручного управления определяется по R2, в направлении Х+ от R2, причем пульт жестко встроен так, что его ориентация не может быть изменена. Бортовое оборудование управления содержит также первый выделенный процессор (21).
Способ привязки установочного средства (8):
Теперь необходимо описать способ привязки установочного средства (8), используемого для определения местоположения и ориентации ПРП (2), имеющей начало отсчета R2. Установочные средства (8) все привязываются один раз при вводе в эксплуатацию к заранее определенным значениям с величиной коррекции или без нее, в заданных положениях и в соответствии с R1. Способ использует набор флажков, обычно стрелок для большей точности, размещенных и тщательно закрепленных на перемещающейся конструкции или на самой ПРП (2), и соответствующие модели САПР, сгенерированные по концепции ПРП (2). Там, где это необходимо, для фиксации определенных позиций этих флажков может быть использовано то же самое метрологическое устройство, которое используется для фиксации R1. В эти установочные средства (8) встроены проверки на достоверность и целостность, и они циклически поверяются с помощью бортового блока ПЛК (12). Эти проверки представляют собой: корректность направления поворота/перемещения относительно направления движения; изменения значений поворота/перемещения без активного движения; отсутствие изменений значений поворота/перемещения при активном движении; достоверность данных скорости между скоростью точки серии перемещений и скоростью по кодеру; контроль достоверности путем проверки значения кодера по сравнению с заданным значением в положении проверки, запущенный посредством активации датчика достоверности при прохождении флажка, помещенного на статистически часто проезжаемом участке пути.
Этот способ позволяет определить местоположение и ориентацию (R2) по отношению к системам координат, имеющим (R1) как начало.
Функции, и база данных, и обмен данными, и ввод/обработка/вывод данных:
Фиг. 12 иллюстрирует схему потоков данных, связывающую различные модули, используемые во время различных этапов работы.
С точки зрения работы способ основан на двух основных этапах работы, причем первый этап соответствует сбору точек и генерированию одного уникального облака точек (1А), а второй этап соответствует предотвращению столкновений в процессе использования ПРП (2).
Суть первого этапа работы состоит в применении следующих модулей. Один первый модуль, называемый трехмерный сканирующий модуль (40), отвечает за сбор частичных облаков (41) точек, каждый из которых соответствует части ТСПЛ (1). Количество трехмерных сканирующих модулей (40) соответствует количеству трехмерных сканирующих средств, используемых в системе. Каждое частичное облако (41) точек пересылается на другой модуль, называемый трехмерный модуль (42). Трехмерный модуль (42) отвечает за сбор, фильтрование и совместное отображение частичных облаков (41) точек и за создание одного уникального полного облака (1А), представляющего внешнюю поверхность полного ТСПЛ (1). Сгенерированное полное облако точек (1А) пересылается на следующий модуль, называемый управляющий модуль (43).
Второй этап работы состоит в применении следующих модулей. Управляющий модуль (43) служит центральной системой управления для хранения результирующего полного облака (1А), сгенерированного в ходе этапа 1, и для передачи полного облака (1А) на другие модули (44) предотвращения столкновений. Управляющий модуль (43) также служит главный пользовательским интерфейсом для операторов. Этот управляющий модуль (43) также хранит все статические параметры, квалифицирующие характеристики здания (4), установочные параметры ПРП (2), характеристики ТСПЛ (1) и все другие характеристики, необходимые для определения ограничений системы в целом. Модуль (44) предотвращения столкновений первым объединяет установочные параметры ПРП (2), полученные от управляющего модуля (43), и данные текущего местоположения ПРП (2), полученные от модуля (45) программируемого логического контроллера (ПЛК) передвижной рабочей платформы, для построения трехмерной модели (2А), представляющей ПРП (2) и ее текущее местоположение и ориентацию. Путем сравнения правильно размещенной и ориентированной трехмерной модели (2А) и каждой точки полного облака точек (1А), полученного от управляющего модуля (43), модуль (44) предотвращения столкновений генерирует разрешения на движение модулю (45) ПЛК передвижной рабочей платформы. Количество модулей (44) предотвращения столкновений соответствует количеству передвижных рабочих платформ (ПРП) (2). Модуль (45) ПЛК передвижной рабочей платформы определяет текущее местоположение и ориентацию ПРП (2), основываясь на данных установочных средств (8) и ранее описанном способе, и направляет информацию в модуль (44) предотвращения столкновений, а также ограничивает движение ПРП (2) на основании разрешений на движение, получаемых от модуля (44) предотвращения столкновений.
Точнее говоря, каждый модуль состоит из специализированного программного обеспечения.
Встроенное программное обеспечение трехмерного сканирующего средства:
Трехмерный сканирующий модуль (40) образован из встроенного программного обеспечения (46), принадлежащего трехмерному сканирующему средству (3). Назначением этого встроенного программного обеспечения (46) является выполнение каждого сканирования и генерирование частичных облаков (41) точек. Запросы на сканирование основываются на пусковых сигналах и параметрах, посылаемых через выделенный интерфейс (48) по данным с помощью прикладного программного обеспечения (47) для трехмерной графики, принадлежащего трехмерному модулю (42). Каждое частичное облако (41) точек, каждое, соответствующее части ТСПЛ (1), содержит по меньшей мере две контрольные метки (S1, S2) здания, автоматически узнаваемые встроенным программным обеспечением (46). Типичные параметры, посылаемые прикладным программным обеспечением (47) для трехмерной графики через интерфейс (48) по данным, представляют собой установочные параметры требуемого разрешения и установочные параметры требуемого качества, поскольку большая часть трехмерных сканирующих средств (3) могут работать с многоуровневым разрешением при различных уровнях качества. Установочные параметры разрешения определяют относительное расстояние между точками в облаке точек и соответствующий уровень детализации. При увеличении установочных параметров разрешения количество записанных точек увеличивается и уменьшается относительное расстояние между точками. При снижении установочных параметров разрешения количество записанных точек уменьшается и увеличивается относительное расстояние между точками. Установка параметров разрешения основывается на требуемом уровне детализации, расстоянии до ТСПЛ (1) и расстоянии до контрольных меток (S1, S2). Установка параметров качества определяет скорость измерения и снижение уровня шумов. При увеличении установочных параметров качества скорость измерения снижается. Время, в течение которого сканер удерживает каждую сканируемую точку, а также статистическая точность измерения каждой точки увеличиваются за счет проведения многочисленных измерений с целью подтверждения информации путем осреднения результата. Снижение уровня шумов выполняется с использованием внутреннего алгоритма, используемого для определения, являются ли различия в сканируемых точках точным отображением детали или шумов. Алгоритм сравнивает сканируемые точки в пределах определенного расстояния от одной до другой и определяет, укладывается ли эта разница в допуск, заданный при установке параметров качества. Если нет, то отсканированная точка удаляется. По существу установку параметров качества выбирают на основании условий внешней среды, имея в виду, что лучшее качество требует большего времени на сканирование, более низкое качество увеличивает допуски на ошибки.
Интерфейс трехмерного сканирующего модуля/трехмерного модуля:
Через тот же интерфейс (48) по данным трехмерное сканирующее средство (3) немедленно передает назад на прикладное программное обеспечение (47) для трехмерной графики свой собственный текущий статус режима работы. Как только частичное облако (41) точек полностью обработано, трехмерное сканирующее средство (3) компилирует каждый набор данных сканирования в специальный файл и пересылает его через выделенный интерфейс (48) по данным на прикладное программное обеспечение (47) для трехмерной графики.
Прикладное программное обеспечение для трехмерной графики:
Прикладное программное обеспечение (47) для трехмерной графики работает или на выделенном физическом компьютере, или на виртуальной машине, установленной на главном сервере (10). Прикладное программное обеспечение (47) для трехмерной графики собирает и хранит в локальной базе (49) данных все специальные файлы, относящиеся к частичному облаку точек (41). Следующим шагом является автоматическая регистрация и последующая обработка. Прикладное программное обеспечение (47) для трехмерной графики является собственной разработкой, которая управляет дополнительными функциями, запускаемыми специализированным программным обеспечением (50) для трехмерной графики, продаваемым на рынке, как, например, Faroscene компании Faro или Polyworks компании InnovMetric Software Inc., и взаимодействует с ним с помощью специализированного пакета программ для разработки приложений (SDK).
Во время совместного отображения всех частичных облаков точек основным аспектом является использование и внимание ко всем контрольным меткам (S1, S2 и т.д.) здания, расположенным в каждом частичном облаке (41) точек, во-первых, с целью точного отображения и, во-вторых, для преобразования всех точек, составляющих полное облако точек (1А), в соответствии с контрольными метками (S1, S2 и т.д.) здания и, следовательно, с R1.
В прикладном программном обеспечении (47) для трехмерной графики применяются дополнительные особые признаки в зависимости от конфигурации здания (4) и его наполнения.
Первый особый признак прикладного программного обеспечения (47) для трехмерной графики исключает данные, не используемые для системы предотвращения столкновений, с тем, чтобы ограничить размер обрабатываемых файлов и, следовательно, время последующей обработки. Фактически, даже если трехмерное сканирующее средство (3) может при своем максимальном диапазоне сканирования просканировать здание (4) полностью со всеми его подробностями, например стенами, крышей, полом и другими статичными препятствиями, должны рассматриваться только данные в ограниченном диапазоне, определяемом максимальным рабочим диапазоном ПРП (2) внутри здания (4). Набор параметров определяет рабочий диапазон сканирования. Это означает, что сканируются ТСПЛ (1), при этом дополнительно сканируются, если должным образом оцифрованы, другие элементы здания (4) и любые его подробности, например стены, потолок, пол и другие статичные препятствия в пределах максимального диапазона ПРП (2).
Другой дополнительный признак ограничивает время последующей обработки. Способ состоит в получении точек в два этапа, когда все статичные точки, например стены или другие зафиксированные препятствия, сканируются, проходят последующую обработку и хранятся в ходе первого этапа. Второй этап соответствует систематическому сканированию, в рамках первого сканирования, для получения точек, соответствующих нестатичным точкам, принадлежащим ТСПЛ (1), например. Поэтому систематическая последующая обработка ограничивается только вторым этапом. Результирующие точки первого и второго этапов в конце сливаются вместе.
Другой признак используется для создания виртуальной стены точек в случае необходимости и в зависимости от конфигурации здания (4), а также в зависимости от требований системы предотвращения столкновений. Создание виртуальной стены точек выполняется с помощью прикладного программного обеспечения для трехмерной графики, основанного на критериях, содержащихся в наборе параметров, определенных во время ввода в эксплуатацию.
Результатом реализации алгоритма фильтрования и отображения всех точек частичного облака точек является одно объединенное уникальное полное облако точек (1А), которое систематически ассоциируется с квалифицирующими параметрами ТСПЛ (1) и хранится как специальный файл в локальной базе данных (49), принадлежащей прикладному программному обеспечению (47) для трехмерной графики. Ассоциированный файл используется прикладным программным обеспечением (47) для трехмерной графики, чтобы осуществлять проверку путем сравнения облака точек между заново отсканированным ТСПЛ (1) и ранее сохраненными данными по такому же типу ТСПЛ (1), причем в качестве статистической информации выдается процент сходства между ними обоими.
Кроме того, каждое полное облако точек (1А) трансформируется с помощью специализированного программного обеспечения (50) для трехмерной графики в одностороннюю триангулированную сетку, причем создается файл формата ".stl", который хранится в той же локальной базе данных.
Выделенный локальный графический пользовательский интерфейс (51) позволяет оператору с помощью специализированного программного обеспечения (50) для трехмерной графики получать доступ к данным, хранящимся в локальной базе (49) данных, в частности к данным по частичному и полному облаку точек (41, 1А). Этот пользовательский интерфейс используется, главным образом, в случае необходимости для проверки конкретных деталей, но не имеет каких-либо эксплуатационных возможностей.
Прикладное управляющее программное обеспечение:
Прикладное управляющее программное обеспечение (52) является собственной разработкой и должно рассматриваться как программа функционирования всей системы. Оно устанавливается на вышеописанном одном главном сервере (10). Задачей прикладного управляющего программного обеспечения (52) является координация обоих рабочих этапов путем управления первого этапа работ и передачи результатов первого этапа на второй этап работ.
Прикладное управляющее программное обеспечение (52) хранит в своей выделенной базе данных (53) все статичные параметры, квалифицирующие характеристики здания (4), установки ПРП (2), характеристики ТСПЛ (1) и все другие характеристики для определения пределов системы в целом. Местоположение позиций сканирования является определяющим фактором для ограничения количества и поверхности теней, соответствующих невидимым или плохо различимым поверхностям, особенно на сложных или большеразмерных ТСПЛ (1). Поэтому на основании характеристик каждого типа ТСПЛ (1) оптимальное местоположение позиций сканирования и оптимальное разрешение будут отличаться и будут храниться отдельно в базе данных.
Для выполнения этапа 1 полный комплект параметров, определенных выше, систематически передается с запросом на сканирование от прикладного управляющего программного обеспечения (52) на прикладное программное обеспечение (47) для трехмерной графики через выделенный интерфейс (54) по данным. В свою очередь и через тот же интерфейс по данным результирующее уникальное полное облако точек (1А) автоматически экспортируется из базы данных (49) прикладного программного обеспечения для трехмерной графики в базу данных (53) прикладного управляющего программного обеспечения.
Одно приложение (55) для основного графического пользовательского интерфейса выполняется с настольного графического пользовательского интерфейса (11). Приложение (55) для основного графического пользовательского интерфейса состоит из нескольких меню с различными уровнями доступа и защищено паролем. С этой центральной точки может быть проверена или модифицирована любая установка, при этом можно посмотреть статус и индикаторы наличия процесса во всей системе.
Специально разработанное трехмерное анимационное изображение в режиме реального времени относительно статичных и полностью подвижных компонентов здания (4) можно визуализировать на пользовательском интерфейсе (55), показывая в режиме реального времени местоположения и ориентации компонентов здания (4), ТСПЛ (1) и передвижных рабочих платформ (ПРП) (2) во время работы.
Прикладное программное обеспечение управления интерфейсом/прикладное программное обеспечение процесса предотвращения столкновений:
Через выделенный интерфейс (56)по данным прикладное управляющее программное обеспечение (52) совместно использует результирующее полное облако точек (1А) с прикладным программным обеспечением (57) предотвращения столкновений и одновременно с установочными параметрами ПРП (2). Переданные данные хранятся в локальной базе данных (64), принадлежащей к прикладному программному обеспечению (57) процесса предотвращения столкновений.
Прикладное программное обеспечение процесса предотвращения столкновений/Программное обеспечение работы ПЛК передвижной рабочей платформы:
Прикладное программное обеспечение (57) процесса предотвращения столкновений является собственной разработкой для управления процессом предотвращения столкновений. Прикладное программное обеспечение (57) процесса предотвращения столкновений устанавливается на каждый бортовой первый процессор (21) каждой ПРП (2).
Согласно Фиг. 14D предварительная задача для прикладного программного обеспечения (57) процесса предотвращения столкновений состоит в построении упрощенной виртуальной трехмерной модели (2А) как виртуальной основной оболочки, представляющей ПРП (2) и основанной на наборе параметров, определяющих и включающих физические границы ПРП (2), такие как рабочая поверхность, перила, крепления и другие дополнительные элементы, а также включающих ее опорную или подвешенную мачту, если такая имеется, и имеющих все параметры для начала координат R2. Фиг. 13А и Фиг. 13В иллюстрируют принцип, применимый для ПРП (2) любого типа. Количество объемов, составляющих основную оболочку, зависит от сложности конструкции ПРП (2), однако это количество необходимо сохранять достаточно небольшим, так как это влияет на основные характеристики расчетов.
Согласно Фиг. 14А, 14В, 14С, 14D другой набор параметров используется для расширения основной оболочки (70) во всех направлениях для создания виртуальных защитных оболочек. Обычно создается первая самая большая защитная оболочка (71), которая соответствует зоне, где разрешена только невысокая скорость. Далее создается вторая меньшая защитная оболочка, которая соответствует зоне, где перемещения не разрешены.
Возвращаясь к Фиг. 12, программное обеспечение (58) работы ПЛК передвижной рабочей платформы является собственной разработкой для управления на основании установленных точек, фиксируемых с пульта ручного управления (60), задействуемого операторами, перемещениями оси, представляющей ПРП (2), а также для моментального определения с использованием описанного выше установочного средства (8) местоположения с учетом шести степеней свободы и ориентации ПРП (2) относительно начала координат R2, а также относительно систем координат с началом в R1, используя описанный выше способ привязки.
Текущее местоположение с учетом шести степеней свободы и ориентация ПРП (2) определяется и совместно используется прикладным программным обеспечением (57) процесса предотвращения столкновений через быстродействующий и надежный выделенный интерфейс (59) по данным.
На основании полученных через этот интерфейс (59) по данным текущего местоположения с учетом шести степеней свободы и ориентации ПРП (2) прикладное программное обеспечение (57) процесса предотвращения столкновений преобразует их и ориентирует виртуальные трехмерные модели (А) - основную оболочку (70) и защитные оболочки (71, 72) - относительно систем координат с началом в R1.
Специализированный алгоритм прикладного программного обеспечения (57) процесса предотвращения столкновений сравнивает местоположение каждой отдельной точки сгенерированного полного облака точек (1А), представляющего ТСПЛ (1) и имеющего исходную точку R1, с набором окружающих зон исследования вокруг ПРП (2), определенных путем преобразования данных и ориентирования виртуальных трехмерных моделей (2А), имеющих исходную точку R1. В результате этого сравнения прикладное программное обеспечение (57) процесса предотвращения столкновений определяет в соответствии с R2 направление(я) потенциального риска столкновения.
Так что когда определен потенциальный риск столкновения между ПРП (2) и ТСПЛ (1), прикладное программное обеспечение (57) процесса предотвращения столкновений устанавливает в соответствии с R2 набор разрешений на высокую скорость, разблокирование соответствующего перемещения в соответствии с установочными параметрами защитных оболочек и в сочетании с информацией относительно направлений перемещений. Информация мгновенно используется совместно с процессом (58) ПЛК передвижной рабочей платформы с помощью быстродействующего и надежного выделенного интерфейса (59) по данным.
Процесс (58) ПЛК передвижной рабочей платформы объединяет установленные точки перемещения, зафиксированные с пульта ручного управления (60), задействуемого операторами, с полученными от программного обеспечения (57) процесса предотвращения столкновений разрешениями на разблокирование/блокирование высокой скорости, перемещения и направления для ограничения перемещений соответственно по любой оси, а также в соответствии с R2 реализует функцию предотвращения столкновения между ПРП (2) и ТСПЛ (1).
Как определено выше, полное облако точек (1А) может также интегрировать части здания (4) и любые его детали, такие как стены, крыша, пол и другие статичные препятствия, которые находятся в пределах максимального диапазона ПРП (2). За счет расширения функция предотвращения столкновений может быть распространена не только на транспортное средство для перевозки людей, но и на части здания (4) и любые его детали.
Пульт (61) локального пользовательского интерфейса показывает оператору на месте, на ПРП (2), путем простой световой индикации, активирована ли система предотвращения столкновений, находится ли в исправном состоянии, и обнаружены или нет опасности потенциального столкновения.
Через выделенный интерфейс (56)по данным прикладное программное обеспечение (57) процесса предотвращения столкновений тем временем мгновенно совместно выделяет результаты своих расчетов прикладному управляющему программному обеспечению (52) для целей обнаружения и отслеживания. Все входные и выходные условия второго этапа работ хранятся в основной базе данных (53).
Поскольку программное обеспечение (58) процесса ПЛК передвижной рабочей платформы и программное обеспечение (57) процесса предотвращения столкновений связаны между собой через описанные выше интерфейсы (59, 56) по данным и совместно используют данные, представляющие передвижные рабочие платформы (ПРП) (2), относящиеся к зонам исследования и к текущим местоположению с учетом шести степеней свободы и ориентации каждой передвижной рабочей платформы, то функция предотвращения столкновений может быть распространена на систему предотвращения столкновений между различными ПРП (2) с тем же эффектом, как описано выше, путем сравнения каждой зоны исследований для каждой ПРП (2), которые все имеют исходную точку R1. Для большей эффективности предусматриваются интерфейсы прямого обмена данными (62, 63) между программным обеспечением (58) процесса ПЛК и прикладным программным обеспечением (57) процесса предотвращения столкновений.
Система может быть расширена до полной автоматизации перемещений во время проведения работ. С этой системой прикладное управляющее программное обеспечение (52) определяет ограничения, предписывает и контролирует в динамике траектории ПРП (2) для автоматического перемещения, а также по выбору управляет множеством рабочих органов с числовым управлением, смонтированных на ПРП (2), которые могут распылять и дозировать воду, очищающие реагенты, краску и которые могут выполнять другие операции на ТСПЛ (1). Другое расширение системы, известное как динамическое планирование траектории, включает улучшение охраны здоровья и безопасности сотрудников, а также сокращение сроков выполнения работ. Выделенный интерфейс (65) по данным используется для передачи сгенерированных прикладным управляющим программным обеспечением (52) указаний о перемещении программному обеспечению (58) процесса ПЛК передвижной рабочей платформы, а в ответ на передачу сигналов индикации состояния от программного обеспечения (58) процесса ПЛК передвижной рабочей платформы - назад прикладному управляющему программному обеспечению (52).
Этапы работы:
С точки зрения работы способ основан на двух основных рабочих этапах, причем первый этап соответствует сбору точек и генерированию одного уникального облака точек (1А), а второй этап соответствует предотвращению столкновений при эксплуатации ПРП (2).
ЭТАП 1:
Первый этап работы реализуется путем систематического трехмерного сканирования каждый раз, когда ТСПЛ (1) попадает в здание (4).
Как описано выше, из-за большого размера и сложности внешней поверхности ТСПЛ (1) и для того, чтобы избежать теней, где нельзя осуществить измерения приемлемого качества, требуется процедура многократного сканирования с нескольких заранее определенных позиций сканирования. Управляющее прикладное программное обеспечение (52) управления хранит в своей выделенной базе данных (53) для каждого типа ТСПЛ (1) данные об оптимальных позициях сканирования и соответственно оптимальном разрешении. Позиции сканирования определяются для комбинирования сканов ТСПЛ (1) сбоку, сверху и снизу. Необходимо учесть, что для различных позиций сканирования оператор должен принимать во внимание необходимость выдерживания достаточно безопасного расстояния от того места, где предполагается нахождение ТСПЛ (1), поскольку процесс обнаружения еще не выполнен и система предотвращения столкновений не задействована. Ввиду большого размера ТСПЛ (1) необходимо использовать пассажирские подъемники для достижения верхних позиций. Если передвижные рабочие платформы (ПРП) (2) имеют функцию подъема, то они могут быть использованы для достижения верхних позиций. В случае использования передвижных рабочих платформ (ПРП) (2), они могут управляться операторами вручную для достижения каждой позиции сканирования или наоборот, быть заранее запрограммированными для достижения каждой позиции сканирования усовершенствованным автоматическим образом. Последовательность сбора остается неизменной в обоих режимах.
Как описано выше, здание (4) предпочтительно должно быть оборудовано двумя, четырьмя или шестью передвижными рабочими платформами (ПРП) (2), причем половина передвижных рабочих платформ (ПРП) (2) должна предпочтительно передвигаться вдоль левой стороны ТСПЛ (1), а другая половина - вдоль другой стороны ТСПЛ (1). Осуществление настоящего изобретения основывается на двух ПРП (2) и двух сканирующих средствах (3). Для большего удобства одна ПРП (2) связана с одним сканирующим средством (3) и будет работать на левой стороне от центральной линии здания (4), а другая ПРП (2) связана с другим сканирующим средством (3) и будет работать на правой стороне от центральной линии здания (4). Процесс сканирования может выполняться параллельно, при этом обычно применение двух сканирующих средств (3) сокращает время работы по сканированию в два раза.
Последовательность сбора данных осуществляется автоматически и координируется управляющим прикладным программным обеспечением (52), как описано выше.
ТСПЛ (1) размещается на своем определенном месте при определенных условиях. Другое прикладное специализированное передвижное оборудование, обычно лестницы, стремянки, строительные леса, доки или другие рабочие платформы также размещаются на своих определенных местах и при определенных условиях. Оператор приводит ПРП (2) на заранее определенную начальную позицию, предпочтительно на уровне пола, и осторожно размещает сканирующее средство (3) в заранее определенном положении на ПРП (2). Тем временем второй оператор делает то же самое со сканирующим средством (3) на другой ПРП. (2) Оба сканирующих средства включаются. После завершения последовательности загрузки системы рабочий статус каждого сканирующего средства (3) направляется управляющему модулю (43) через трехмерный модуль (42) и соответствующие интерфейсы по данным.
Теперь уполномоченный оператор может начать процедуру этапа 1 с использованием приложения (55) для основного графического пользовательского интерфейса. Каждая ПРП (2) приводится в первую позицию сканирования либо с использованием ручного управления, либо в усовершенствованном автоматическом режиме. При достижении первой позиции сканирования собирается первое частичное облако точек (41). По завершении каждая ПРП (2) переводится на вторую позицию сканирования и так далее до достижения последней позиции сканирования и получения данных по последнему частичному облаку точек (41).
Завершение операции может быть проверено с помощью приложения (55) для основного графического пользовательского интерфейса, сначала посредством автоматического обнаружения недостающих данных, а также визуально путем проверки полученных трехмерных данных. В случае необходимости может быть сделано дополнительное сканирование или сканы могут быть переделаны.
Когда одно полное уникальное облако точек (1А) выполнено должным образом, оператор переводит ПРП (2) в начальную позицию и осторожно снимает сканирующее средство (3). Тем временем второй оператор делает ту же самую работу на ПРП (2) со сканирующим средством (3).
Поскольку система позиционирования и предотвращения столкновений базируется на оптической аппаратуре - трехмерном сканирующем средстве (3) - для определения облака точек (1А), а здание (4) может быть использовано для покрасочных работ, оптическая аппаратура предпочтительно должна быть установлена, когда ТСПЛ (1) только припарковался, и должна быть снята после определения внешней поверхности/формы ТСПЛ (1) и до начала работ по покраске или техническому обслуживанию. Это, во-первых, позволяет избежать риска попадания брызг на оптические линзы телеметрической аппаратуры, а также избежать использования специальной аппаратуры, предназначенной для работы в опасных условиях, известной также как взрывозащищенная, когда используется краска на основе растворителя. Необходимо понимать, что способ основан на определении местоположения/ориентации и внешней поверхности/формы ТСПЛ (1) в определенное мгновение при определенных условиях. Изменения условий после процедуры сканирования не принимаются системой во внимание. Следует учесть, что система может быть усовершенствована для работы также во время покрасочных работ или технического обслуживания и будет поэтому способна обеспечить получение данных мгновенно/в реальном времени во время покрасочных работ или технического обслуживания.
ЭТАП 2:
Второй этап работы соответствует предотвращению столкновений во время использования ПРП (2) для производственных задач.
Как описано выше, одно уникальное полное облако точек (1А) в автоматическом режиме разделяется с управляющим оборудованием (7) передвижной рабочей платформы.
Для подтверждения функционирования перед началом производственных рабочих перемещений под управлением системы предотвращения столкновений оператор должен кратко проверить его правильность. Это осуществляется на виртуальном объекте испытаний, отмеченном как квадрат на полу и имеющем виртуальную высоту один метр. Когда система предотвращения столкновений задействована, оператор сближает виртуальный объект испытаний с ПРП (2) с различных направлений и проверяет, происходит ли должным образом снижение скорости и полная остановка, а также правильно ли происходит движение заднего хода в противоположном направлении от потенциального столкновения. Виртуальный объект испытаний является фиксированной частью полного облака точек. Несколько виртуальных объектов испытаний могут быть виртуально размещены в удобных местах внутри здания (4) во время ввода системы в эксплуатацию и размечены соответствующим образом на полу.
Реакция системы на этапе 2: Во время перемещений ПРП (2) на этапе 2 оборудование (7) управления платформы с обратной связью исследует в реальном времени потенциальную возможность столкновения между ПРП (2) и ТСПЛ (1). Когда обнаруживается пересечение между полным облаком точек (1А) и защитной оболочкой (71) ПРП (2), то ПРП (2) разрешается продолжить свое движение только на малой скорости, при этом световой сигнал указывает это условие. Когда обнаруживается пересечение между полным облаком точек (1 А) и защитной оболочкой (71) ПРП (2), то ПРП (2) полностью останавливается, при этом световой сигнал указывает на это условие. В этом случае оператору разрешено двигаться только в обратном направлении от потенциального столкновения.
С точки зрения работы и как упоминалось выше, ПРП (2) обычно управляется с пульта (16) ручного управления, при этом оператор генерирует установочные точки перемещения, обычно с помощью ручек управления или кнопок. Эффект применения системы предотвращения столкновений состоит в ограничении скорости осевого перемещения в соответствующем направлении до безопасных значений.
Следует отметить, что система предотвращения столкновений может быть заблокирована через приложение (55) для основного графического пользовательского интерфейса. В этом случае ПРП (2) может свободно перемещаться при шести степенях свободы, ограниченная только своей физической свободой перемещения.
Необходимо понимать, что некоторые признаки изобретения, которые для ясности описываются в контексте отдельных вариантов осуществления, могут также быть выполнены в комбинации в едином варианте осуществления. И наоборот, различные признаки изобретения, которые для краткости описываются в контексте единого варианта осуществления, могут также быть выполнены отдельно или в любой подходящей субкомбинации.

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КАМЕР СТЕРЕОЗРЕНИЯ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ВО ВРЕМЯ НАЗЕМНЫХ ОПЕРАЦИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2737562C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ДОПОЛНЕННОЙ И ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2012 |
|
RU2621633C2 |
| ФОРМИРОВАНИЕ МОДЕЛИРОВАННЫХ ДАННЫХ ДАТЧИКОВ ДЛЯ ОБУЧЕНИЯ И ПРОВЕРКИ ДОСТОВЕРНОСТИ МОДЕЛЕЙ ОБНАРУЖЕНИЯ | 2017 |
|
RU2694154C2 |
| СПОСОБ И СЕРВЕР ДЛЯ ОБНОВЛЕНИЯ ПРЕДСТАВЛЕНИЯ КАРТЫ | 2024 |
|
RU2836391C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ РАБОТОЙ УСТРОЙСТВА С ИСПОЛЬЗОВАНИЕМ КОМПЛЕКСНОГО МОДЕЛИРОВАНИЯ С ВОЗМОЖНОСТЬЮ ВРЕМЕННОГО СДВИГА | 2008 |
|
RU2481612C2 |
| Способы и системы для определения компьютером наличия объектов | 2018 |
|
RU2743895C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2024 |
|
RU2839125C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПОДВЕДЕНИЯ К ПОГРУЗОЧНО-РАЗГРУЗОЧНОЙ ПЛОЩАДКЕ ДЛЯ ПРИМЕНЕНИЯ В ГРУЗОВЫХ АВТОМОБИЛЯХ БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2016 |
|
RU2720138C2 |
| ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2789827C2 |
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОМ | 2021 |
|
RU2800529C1 |
Изобретение относится к области вычислительной техники. Технический результат заключается в обеспечении возможности предотвращения столкновений между передвижной рабочей платформой и транспортным средством для перевозки людей. Технический результат достигается за счет устройства для генерирования облака точек, представляющего реальную внешнюю форму транспортного средства для перевозки людей, предназначенного для определения местоположения и ориентации транспортного средства для перевозки людей в здании и относительного местоположения и ориентации по меньшей мере одной передвижной рабочей платформы внутри здания, содержащего: известную контрольную точку внутри здания, трехмерное сканирующее средство, стационарное вычислительное средство, известную контрольную точку передвижной рабочей платформы, установочное средство, первый процессор, предназначенный для генерирования трехмерной модели, представляющей передвижную рабочую платформу, и также предназначенный для определения с учетом до 6 степеней свободы местоположения и ориентации указанной трехмерной модели, представляющей указанную передвижную рабочую платформу. 11 з.п. ф-лы, 19 ил.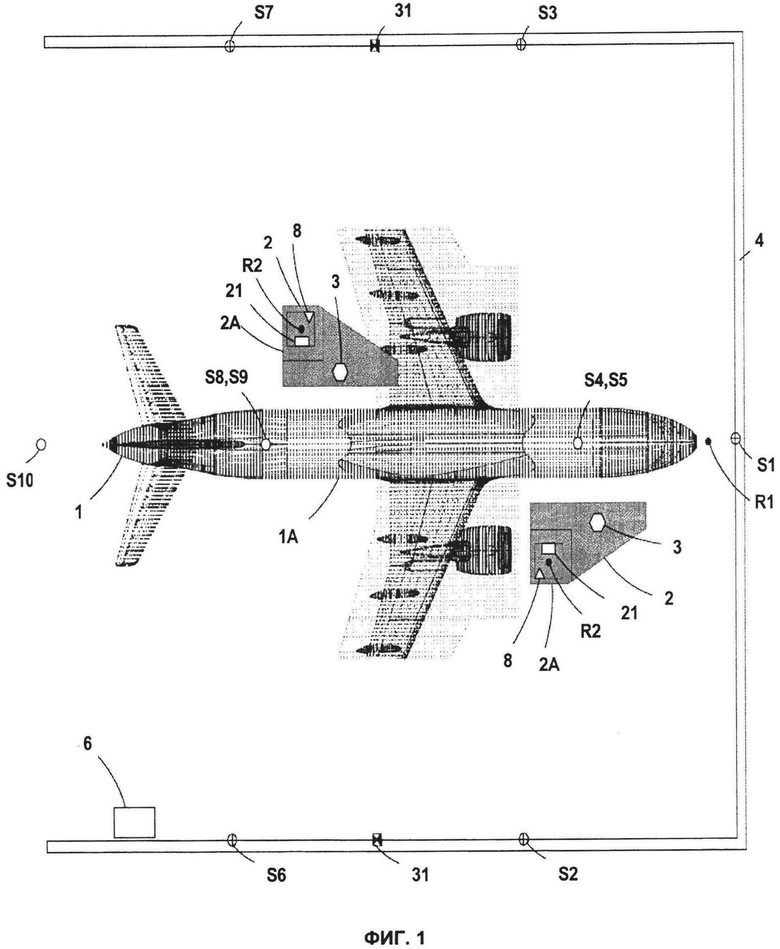
1. Устройство для генерирования облака точек (1А), представляющего реальную внешнюю форму транспортного средства (1) для перевозки людей, расположенного в здании (4), предназначенное для определения местоположения и ориентации указанного транспортного средства (1) для перевозки людей в указанном здании (4) и предназначенное для определения относительного местоположения и ориентации по меньшей мере одной передвижной рабочей платформы (2) внутри здания (4), причем местоположение и ориентация указанного транспортного средства (1) для перевозки людей и местоположение и ориентация указанной передвижной рабочей платформы (2) привязываются по меньшей мере к одной известной контрольной точке (R1) внутри указанного здания (4), при этом указанное устройство предназначено для предотвращения столкновений между передвижной рабочей платформой (2) и транспортным средством (1) для перевозки людей, содержащее:
- по меньшей мере одну известную контрольную точку (R1) внутри указанного здания (4), являющуюся исходной точкой системы координат с 6 степенями свободы и служащую центральной общей контрольной точкой, и
- по меньшей мере, одно трехмерное сканирующее средство (3), предназначенное для определения реальной внешней формы транспортного средства (1) для перевозки людей, и
- по меньшей мере, одно стационарное вычислительное средство (6), предназначенное для генерирования облака точек (1А), по данным трехмерного сканирующего средства (3), причем указанное облако точек (1А) представляет реальную внешнюю форму транспортного средства (1) для перевозки людей, и
- одну известную контрольную точку (R2) передвижной рабочей платформы (2), расположенную на указанной передвижной рабочей платформе (2) внутри указанного здания (4), и
- по меньшей мере, одно установочное средство (8), предназначенное для установки местоположения и ориентировки с учетом до 6 степеней свободы передвижной рабочей платформы (2) внутри указанного здания (4) согласно контрольной точке (R2) передвижной рабочей платформы (2) по отношению к местоположению контрольной точки (R1) здания, и
- трехмерное сканирующее средство (3), установочное средство (8), стационарное вычислительное средство (6) и по меньшей мере один первый процессор (21) соединены между собой через средства (30, 31, 32) связи, и
- указанный один первый процессор (21), предназначенный для предотвращения столкновений между передвижной рабочей платформой (2) внутри указанного здания (4) и транспортным средством (1) для перевозки людей путем сравнения местоположения отдельных точек сгенерированного облака точек (1А) с местоположением и ориентацией трехмерной модели (2А) для определения риска столкновения между передвижной рабочей платформой (2) и транспортным средством (1) для перевозки людей, и
отличающееся тем, что указанный по меньшей мере один первый процессор (21) предназначен для генерирования трехмерной модели (2А), представляющей передвижную рабочую платформу (2), при этом указанный первый процессор (21) также предназначен для определения с учетом до 6 степеней свободы местоположения и ориентации указанной трехмерной модели (2А), представляющей указанную передвижную рабочую платформу (2).
2. Устройство по п. 1, содержащее одну передвижную рабочую платформу (2) с каждой стороны продольной оси транспортного средства (1) для перевозки людей.
3. Устройство по п. 1, в котором передвижная рабочая платформа (2) представляет собой либо подвешенную под крышей здания рабочую платформу, либо закрепленную на основании рабочую платформу, либо колесную рабочую платформу, либо комбинацию подвешенной под крышей здания рабочей платформы и закрепленной на основании рабочей платформы, и колесной рабочей платформы.
4. Устройство по п. 3, в котором передвижная рабочая платформа (2) управляется автоматически или вручную.
5. Устройство по п. 1, в котором по меньшей мере одна передвижная рабочая платформа (2) несет одно или несколько печатающих устройств, или камер, или роботов, или устройств для обработки поверхности, или людей, или комбинацию печатающего устройства и камеры, и робота, и устройства для обработки поверхности, и людей.
6. Устройство по п. 1, в котором транспортное средство (1) для перевозки людей может быть самолетом, вертолетом, ракетой, космическим челноком, пусковым устройством космических летательных аппаратов, поездом, автомобилем, автобусом или кораблем, или любой его частью.
7. Устройство по п. 1, в котором трехмерное сканирующее средство (3) может переноситься указанной передвижной рабочей платформой (2) или нет во время генерирования облака точек (1А).
8. Устройство по п. 1, в котором средство связи основано на инфраструктуре ЛВС (30), основанной на локальной сети Ethernet, или беспроводной ЛВС (31, 32).
9. Устройство по п. 1, в котором стационарное вычислительное средство (6) содержит по меньшей мере один главный сервер (10) и по меньшей мере один второй процессор (20) для обработки трехмерных данных, получаемых от трехмерного сканирующего средства (3), для управления предотвращением столкновений и по меньшей мере один настольный графический пользовательский интерфейс (11) и инфраструктуру локальной сети Ethernet (30, 31, 32), соединяющую все компоненты вместе.
10. Устройство по п. 1, в котором передвижная рабочая платформа (2) дополнительно содержит бортовой первый процессор (21), предназначенный для сравнения местоположения отдельных точек сгенерированного облака точек (1А) с местоположением и ориентацией трехмерной модели (2А), так что при обнаружении риска столкновения между передвижной рабочей платформой (2) и транспортным средством (1) для перевозки людей реализуется заранее определенная кривая замедления до полной остановки с обязательным соблюдением заданного минимального расстояния до физического контакта между любой частью транспортного средства (1) для перевозки людей и передвижной рабочей платформы (2).
11. Устройство по п. 10, в котором минимальное расстояние между передвижной рабочей платформой (2) и транспортным средством (1) для перевозки людей составляет от 100 до 200 мм, предпочтительно 150 мм.
12. Устройство по п. 1, предназначенное для реализации динамического планирования маршрута (ДПМ) по меньшей мере одной передвижной рабочей платформы (2), чтобы автоматизировать вручную управляемые перемещения указанной передвижной рабочей платформы (2) по направлению к транспортному средству (1) для перевозки людей и вдоль него на основе запрограммированных траекторий.
| US 5359542 A, 25.10.1994 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 9383753 B1, 05.07.2016 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ДИНАМИЧЕСКИМ ПРЕПЯТСТВИЕМ | 2012 |
|
RU2526144C2 |

